GomX-4 (GomSpace Express-4)
EO
ESA
Mission complete
Imaging multi-spectral radiometers (vis/IR)
GomX-4 (GomSpace Express-4) was a commercial technological demonstration mission consisting of two 6U CubeSats as part of GomSpace ApS from Denmark, with the aim of demonstrating handling of large satellite formations. The mission consisted of GomX-4A, a collaboration between GomSpace and the Danish Ministry of Defence; and GomX-4B, a collaboration between ESA (European Space Agency) and GomSpace to demonstrate nanosatellite capability. Both satellites were launched in February 2018 from JSLC (Jiuquan Satellite Launch Centre) in China.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, NSO |
| Mission status | Mission complete |
| Launch date | 02 Feb 2018 |
| End of life date | 31 Mar 2023 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation |
| Measurement detailed | Land surface imagery, Vegetation type |
| Instruments | HyperScout, ADSB Receiver (GOMX4) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Data collection |
| CEOS EO Handbook | See GomX-4 (GomSpace Express-4) summary |

Summary
Mission Capabilities
Sensors onboard the GomX-4 satellites included ISL (Inter-Satellite Link), HyperScout, ADS-B (Automatic Dependent Surveillance - Broadcast), AIS (Automatic Identification System), and the Chimera (Cubesat Highly Integrated Memory Radiation Assurance) experiment.
ISL was connected to an active S-band patch antenna to allow for ISL communication, however its bit rates were limited due to regulatory aspects and distances. Meanwhile, Hyperscout was a miniature hyperspectral imager from The Netherlands, used to monitor natural disasters and classification of infrastructure and urban areas, and ADS-B was used to assist aircraft in determining positioning via satellite navigation, broadcasting this location to allow for tracking, particularly useful over large bodies of water. AIS was used for naval tracking of ships, which monitored both AIS channels simultaneously to show ship positions. The propulsion system was used to adjust the satellite’s orbit, with the main goal to test the radio link at different distances. Finally, the Chimera experiment was used to understand how high-energy charged atomic particles in space affect the performance of COTS (Commercial Off-the-Shelf) electronics.
Performance Specifications
HyperScout was the only imager on board the satellites, and imaged using a three mirror anastigmat telescope (TMA), which allowed for high optical quality with a low power consumption. The FOV (field of view) of GomX-4 was set at 23° across-track, with a spectral range of 400 - 1000 nm, spectral resolution of 15 nm and swath width of 200 km. The GSD (ground sampling distance) was set at 70 m.
The GomX-4 satellites operated in a sun-synchronous orbit with an altitude of approximately 500 km and an inclination of 97.32°, with a period of 94.6 minutes and revisit time of 5 days.
Space & Hardware Components
GomX-4 used the same satellite architecture as previous GomSpace 6U CubeSats, with slightly different hardware. The design utilised the preceding GomSpace mission, the GomX-3 mission, which was a 3U CubeSat. The ISL worked in conjunction with Software Defined Radio (SDR) which managed modulation, demodulation and protocol functions for communication. Propulsion was achieved using cold-gas design and thrusters that allowed for precise thrust control.
GomX-4 (GomSpace Express-4) Mission
Spacecraft Launch Mission Status Sensor Complement References
The GomSpace missions GomX-4A and GomX-4B are two 6U CubeSats with the objective to demonstrate key technologies to handle large satellite formations. Like its predecessor GomX-3, the GomX-4B mission is a collaboration between ESA (European Space Agency) and GomSpace ApS of Aalborg, Denmark to demonstrate new capabilities of nanosatellites.
In October 2016, ESA signed a contract for its biggest small nanosatellite yet: GomX-4B will be a 6U CubeSat, intended to demonstrate miniaturized technologies, preparing the way for future operational nanosatellite constellations. GomX-4B is double the size of ESA’s first technology CubeSat, GomX-3, which was released from the ISS (International Space Station) on October 5, 2015. 1) 2)
“ESA regards CubeSats, based on standardized 10 cm units, as very promising for early testing of new technologies in space at a low cost,” explains Roger Walker, heading ESA’s technology CubeSat initiative. “GomX-4B’s increased size will accommodate more technology payloads, and enables a higher level of performance.”
The contract with Danish CubeSat specialist GomSpace is supported through the In-Orbit Demonstration element of ESA’s General Support Technology Program, focused on readying new products for space and the marketplace. Aiming for flight in early 2018, GomX-4B will be launched and flown together with GomX-4A, designed by GomSpace for the Danish Ministry of Defence under a separate contract.
GomX-4B is funded by ESA for IOD (In-Orbit Demonstration) purposes demonstrating the 5 payloads on-board: the 6U propulsion module from NanoSpace; the innovative ISL (Inter-Satellite Link ) from GomSpace; the Chimera board developed by ESA; the HyperScout Hyperspectral Camera from Cosine and the Star Tracker from ISIS. GOMX-4A is a satellite to monitor Greenland and the artic region by capturing ADS-B, AIS and images for DALO (Danish Defense Acquisition and Logistics Organization).
GomX-4 is a research and development mission by GomSpace. It includes 2 satellites and 3 partners: DALO (Danish Defence Acquisition and Logistics Organization), TUD (Technical University of Denmark) of Lyngby, Denmark, and ESA (European Space Agency).
GomX-4A is sponsored by DALO who by this mission will have their first satellite intended to contribute to surveillance of the Artic. The GomX-4A demonstration is part of an analysis seeking to identify best-practice and future efforts reinforcing the Danish Defense’s surveillance of the Artic within the Kingdom. The satellite has been named ”Ulloriaq” after the word ”star” in the Greenlandic language.
The two CubeSats will stay linked through a new version of the SDR (Software Defined Radio) system demonstrated on GomX-3, while their relative positions along their shared orbit is controlled up to a maximum 4500 km. Such intersatellite links will allow future CubeSat constellations to relay data quickly to users on the ground. The same radio system will also be used for rapid payload data downloads to Earth.
Nanospace of Uppsala in Sweden is contributing the highly miniaturized cold-gas thrusters for controlling the orbit, allowing future CubeSat-based constellations to be deployed quickly after launch.
Note: GS Sweden AB, the parent company of GomSpace ApS, has agreed with the Swedish Space Corporation (Svenska rymdaktiebolaget, SSC) to acquire 100% of the shares of NanoSpace AB, a wholly owned subsidiary of SSC. 3)
Additional technology payloads include a compact hyperspectral imager called HyperScout, developed by Cosine Research in the Netherlands; a miniaturized star tracker from ISIS (Innovative Solutions In Space), of Delft, The Netherlands; an in-house ESA experiment to test components for radiation hardness; and an ADS-B antenna for aircraft tracking, developed from the GomSpace system tested on GomX-3.
The GomSpace business operations are conducted through the wholly-owned Danish subsidiary, GomSpace A/S, with operational office in Aalborg, Denmark. GomSpace is a space company with a mission to be engaged in the global market for space systems and services by introducing new products, i.e. components, platforms and systems based on innovation within professional nanosatellites.
GomX flight demonstration program: The GomX-4 mission is part of GomSpace’s “GomX” flight demonstration program aiming at introducing new capabilities and acquiring in-orbit experience with these. The GomX missions are typically implemented as a collaboration between GomSpace and project sponsors. Table 1 provides an overview.
Mission | Objectives | Status/Results |
GomX-1 | • 2U platform | • Launched in 2013 |
GomX-2 | • 2U platform, new avionics | • Launch failure in 2014 |
GomX-3 | • 2U platform, new avionics | • Launched in 2015 |
GomX-4 | • 2 x 6U platforms | • Launched on 2 February 2018 |
GomX-4 Mission Goals 4)
The GomX-4 mission consists in two nanosatellites flying in Sun Synchronous Orbit at around 500 km of altitude during a lifetime between 3 and 5 years. They will perform several experiments and images/data collection around the globe, streaming them daily to the primary ground station located in Aalborg.
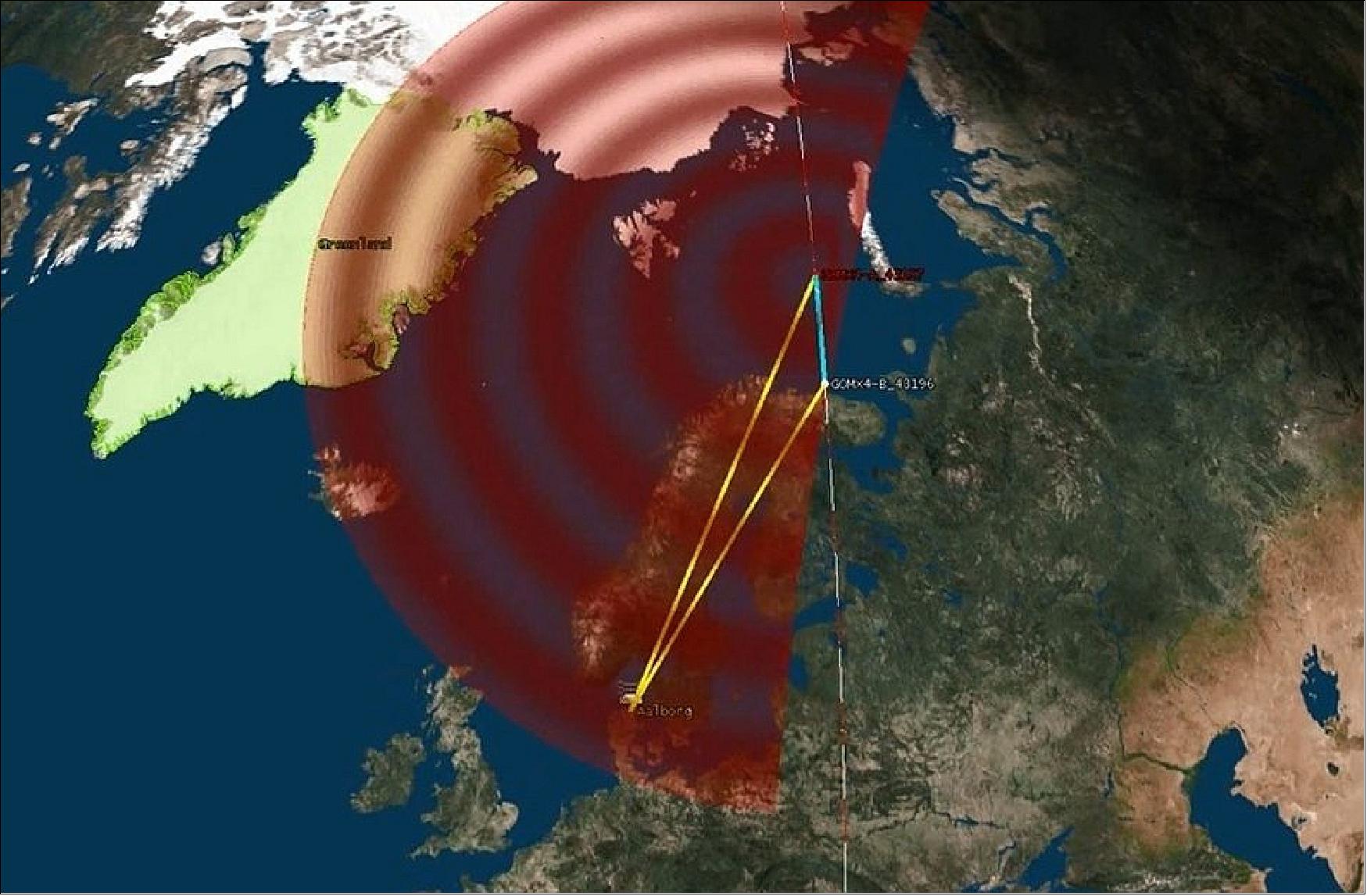
As primary capacity to be demonstrated, one satellite captures data from a certain targeted region and it is transmitted to the second satellite while it is under ground station coverage using the ISL (Inter-Satellite Link). The ISL shall be characterized in inter-satellite distances from approximately 200 km up to line of sight, around 4500 km, using different data rates and transmission power.
During these operations, the relative separation and station keeping between the two satellites in-orbit is controlled by propulsive maneuvers from one of the satellites, GomX-4B.
The concept of the coordinated operations between the two GomX-4 satellites is directly extrapolated to constellations with satellites distributed in same and different planes to collect or transmit data with minimum latency between space and ground segments.
Spacecraft
The GOMX-4 mission is part of GomSpace’s “GOMX” flight demonstration program aiming at introducing new capabilities and acquiring in-orbit experience with these. The GOMX missions are typically implemented as a collaboration between GomSpace and project sponsors. 5)
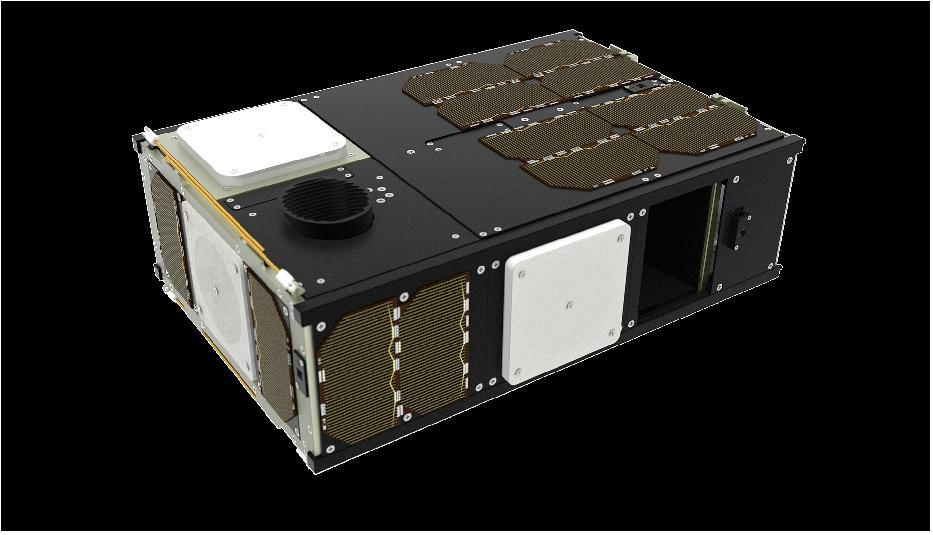
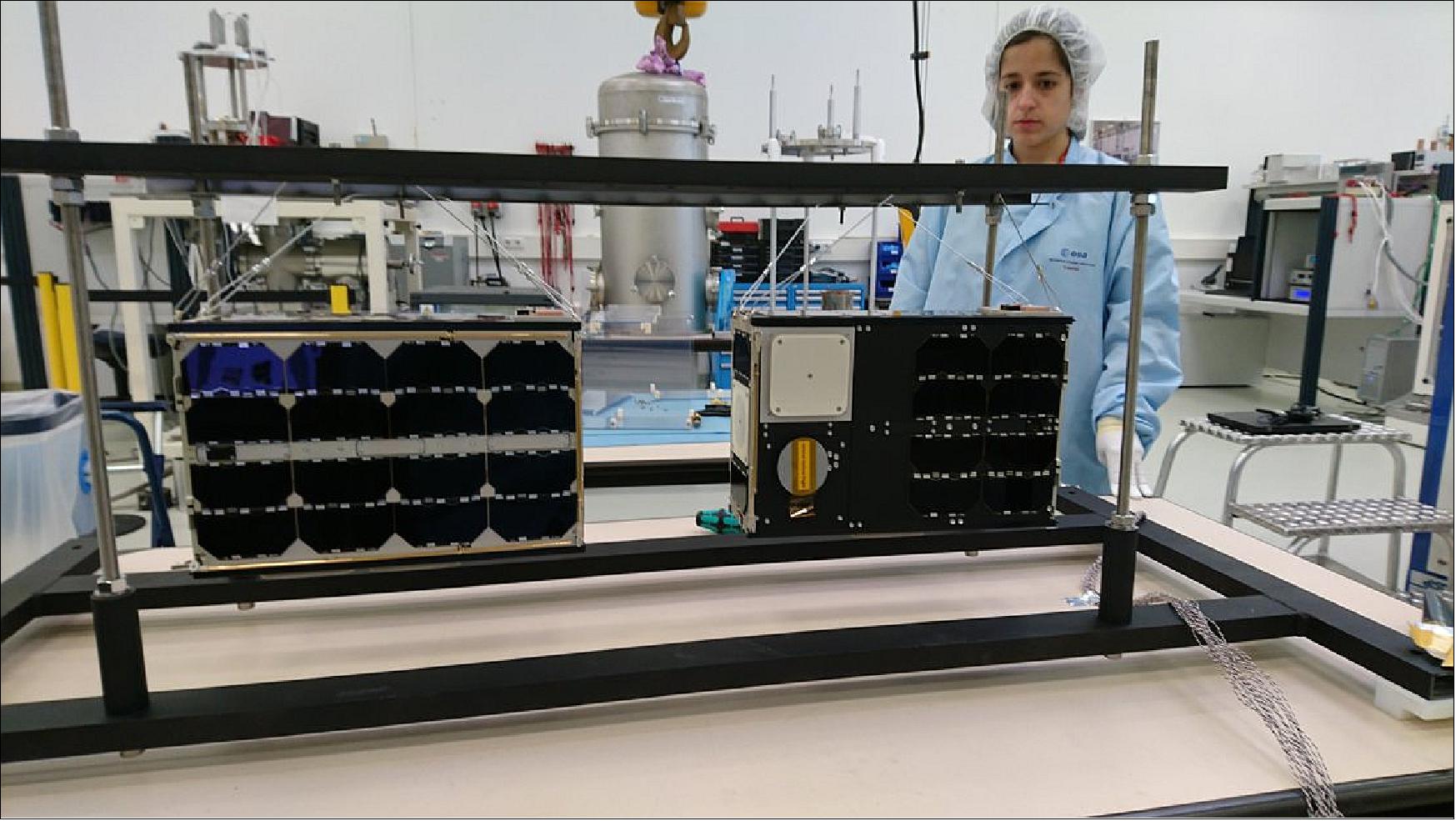
GomSpace is the project prime responsible for the satellite platform, the intersatellite linking radio communication subsystem and integration of partner contributions . The satellites will be 6U satellites, small in size, with dimensions of 20 x30 x10 cm, each with a mass of approximately 8 kg. The two satellites will be launched together in 2018 with a planned mission to be completed within 2019.
Both satellites apply the same architecture based on the GomSpace 6U platform with only different hardware configuration. One of the main new subsystems is the NanoPower P60, a modular EPS with independent input and output modules connected to a dock allowing various input and output channels with protected and configurable power channels. On the other hand, the ADCS subsystem on-board is an upgraded version for large cubesat sizes using powerful reaction wheels, external gyro sensor and adapted to integrate different star tracker technologies, in addition to the magnetorquer, sun sensors and magnetometer successfully used in previous missions. The space-ground communication capacity of both satellites are improved by the use of High Speed Link in S-band which supports the nominal UHF communication link for uplink and downlink.
On top of these highly capable internal subsystems, this platform allows different external configurations including various antennas, sensors, solar panels, radiation shields and radiative surfaces customized to the satellite only changing the mounting plate. In this way, the external components of the 6U platform are directly scalable to even larger platform or different structures by only mechanical customization.
The two 6U satellites are developed to the PA/QA (Product Assurance/Quality Assurance) standards now imposed by ESA on nanosatellite missions. These are derived from the ECSS (European Cooperation for Space Standards) system, but tailored for use in innovative missions. The satellites have been qualified for 20 krad TID (Total Ionizing Dose) of radiation and single-event-upset characterization has been performed at the board level.
The satellite design reuses many products and designs flight qualified in the 3U GomX-3 mission 7), but the architecture has now been scaled to the 6U class and the ISL (Inter-Satellite Link) and propulsion capabilities have been added to the platform. The ISL capability is based on GomSpace's modular SDR (Software Defined Radio) platform. The main SDR board performs all the modulation, demodulation and protocol functions and is connected to three active patch antennas. Each antenna provides filtering, LNA and PA functions. One forward and one aft looking antenna is used for ISL, and the final antenna is Nadir looking for ground communication. The system allows data rates up to 7.5 Mbit/s, but actual performance is limited to comply with regulatory provisions.
The propulsion capability is based on NanoSpace's flight proven cold-gas design now up-scaled to the 6U platform. A cornerstone of NanoSpace's technology is the MEMS based thrusters that allow extremely accurate thrust control.
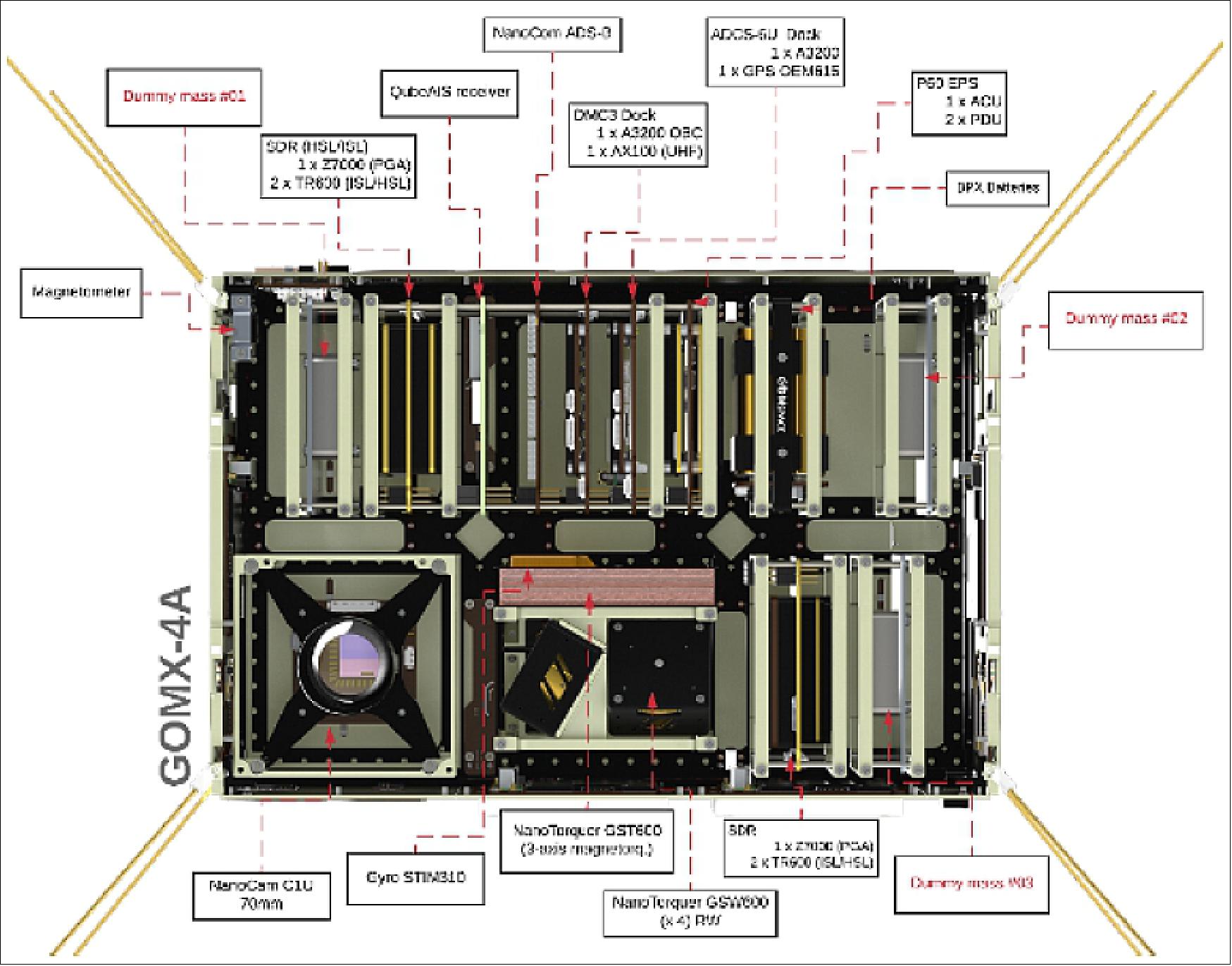
GomX-4A
The GomX-4A satellite accommodates the AIS and ADS-B flight proven receivers together with the 3 Mpx camera. These instruments operate to monitor regions of interest, like the Arctic area, where the ships and planes information is scarce, commonly determined by estimations about the captured data in populated regions. The GomX-4A satellite carries no propulsion system (this is provided by GomX-4B).
For the ISL operations, the satellite includes two patch antennas in every 2U end and the GomSpace SDR (Software Defined Radio) implementing two innovative modulation skills for short and long distances. Under large distances, the required transmission power to close the link budget exceed the maximum PFD (Power Flux Density) allowed by ITU regulations. By this reason, for inter-satellite distances above 600 km, the DSS (Direct Spread Spectrum) architecture is used in the satellites reducing the power transmitted measured in a 4 kHz bandwidth in which the PFD is defined.
The GomX-4A satellite includes three stacks of dummy masses to compensate for the mass different regarding to GomX-4B, facilitating the similar dynamics and deorbit behavior for longer operations.
GomX-4B
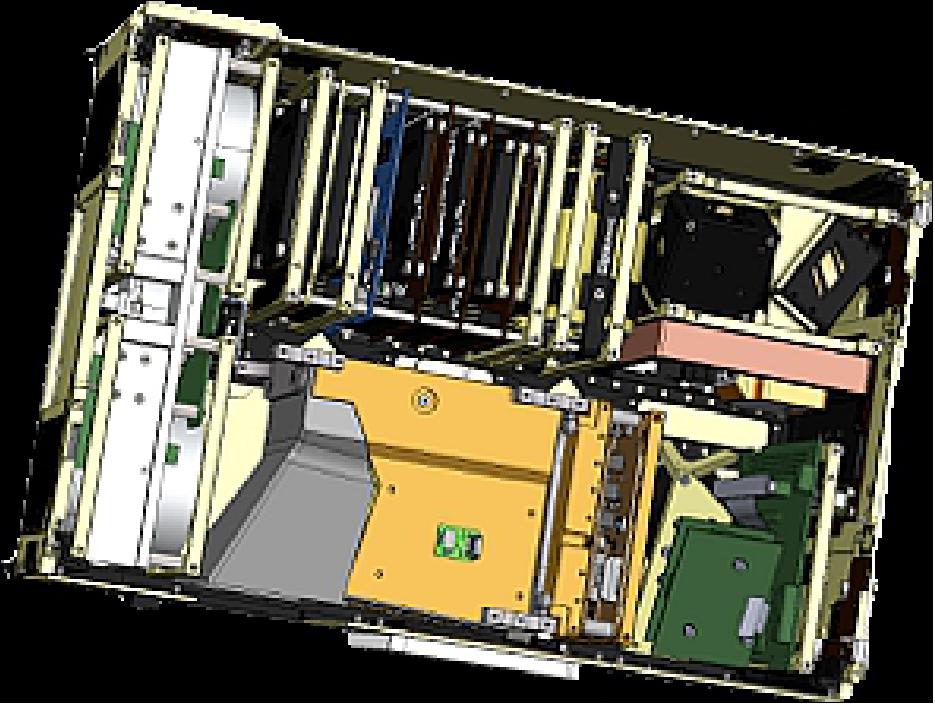
The two spacecraft are similar but the GomX-4B satellite is the more complex as it packs more payloads, including the propulsion system. The Figure 3 depicts the GomX-4 system diagram indicating the system in the configuration and their integration in the system.
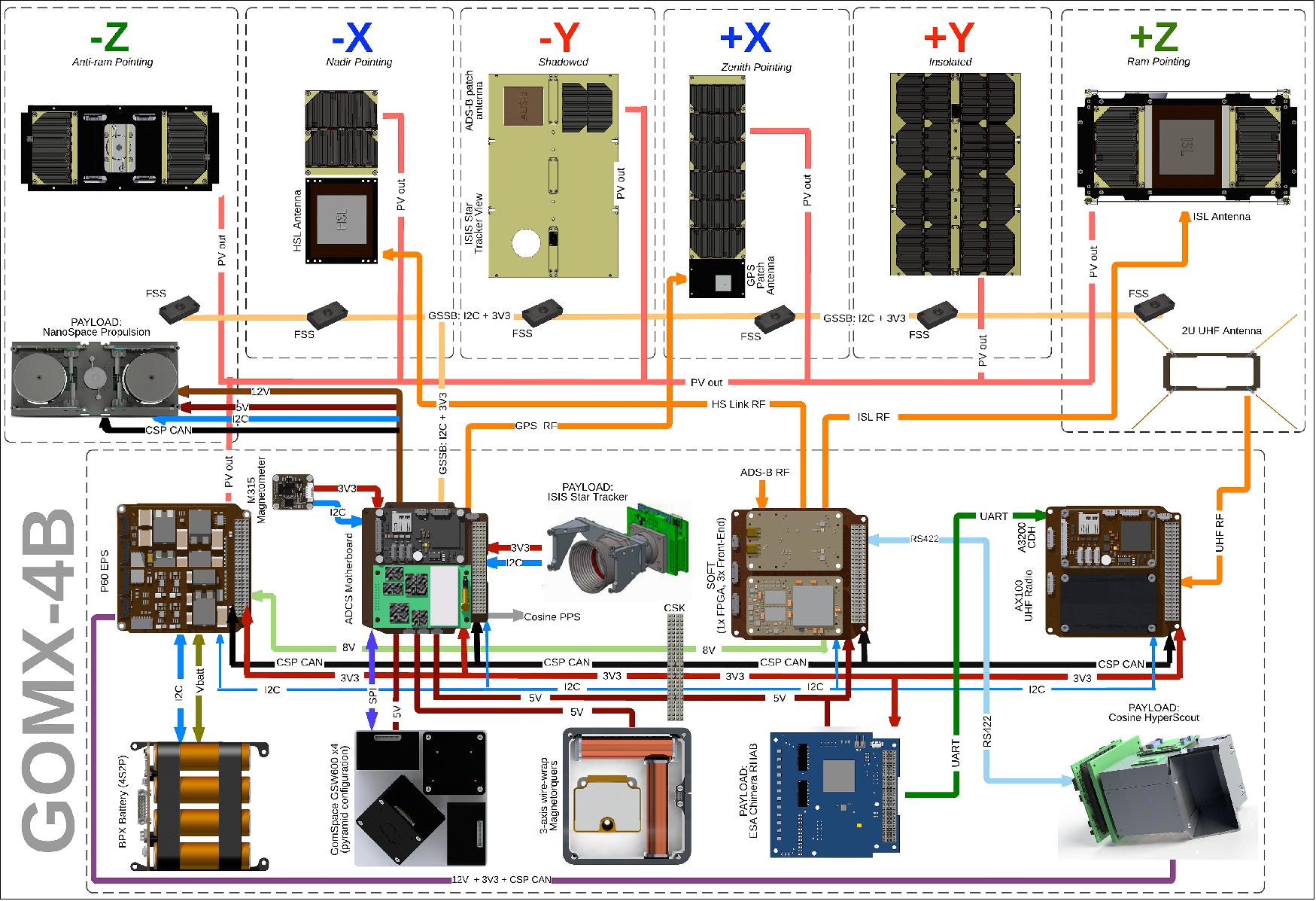
GomX-4B is the demonstrator satellite for orbit control maneuver based on the cold-gas 6U propulsion module from NanoSpace. The propellant is sized with around 120 grams of butane, intended to compensate differences in orbit altitude from the launch, to control the inter-satellite distances in short time, to perform station keeping and to avoid potential risk collision if needed.
The main communication bus in the GomX-4 architecture is based on the CAN bus and in this aspect departing from the earlier GOMX missions that was based on the I2C bus. The CAN bus provides higher reliability and data transfer rates.
The star-tracker aperture is clearly visible on the topside together with an ADS-B patch antenna. Two S-band patch antennas are visible on the sides of the satellite for ISL and ground communication.
The ISL payload is identical than the GomX-4A one except in the use of only one patch antenna in the opposite 2U end of the propulsion module. Additionally, this satellite also includes three payloads for technology demonstration: the Chimera board by ESA to analyze COTS memory behavior under the radiative space environment, the HyperScout camera from Cosine for hyperspectral images and the Star Tracker from ISIS for high accuracy attitude determination.
The satellite is fully “crowded” with subsystems and payloads including the relatively bulky hyperspectral imager looking out the side of the satellite.
The IOD (In-Orbit Demonstration) CubeSat Tailoring was created by ESA to apply an appropriate level of ESA requirements to the more general CubeSat standard.
The full ECSS (European Cooperation for Space Standards) is out of scope for low-cost CubeSat missions; the CubeSat IOD standard is tailored to apply a subset of the full requirements. Thus, each ECSS Engineering standard is classified as “applicable”, “guideline”, or “not applicable”. Within standards classified as applicable, there is a line-by-line tailoring of each requirement’s applicability to IOD CubeSat projects. In excluding standards (or specific requirements within a standard), a higher level of risk is accepted for these small missions. The tailored ECSS Engineering standards are supplemented by “light” Product and Quality Assurance requirements developed specifically for IOD CubeSat projects, where higher risk tolerance and extensive use of COTS components is commonplace.
The IOD CubeSat tailoring represents the expertise that ESA brings to the table when working on nanosatellite missions. It has been refined through a variety of nanosatellite projects, including GomX-3. The refinement aims to be helpful for developers, with the goal of increasing the robustness, quality and reliability of CubeSats without excessive overhead. The tailoring is available to partners when collaborating on ESA CubeSats. For further information about the IOD CubeSat ECSS tailoring, please contact the ESA Directorate of Technical and Quality Management.
This IOD approach as been applied to the GomX-4B project.
AIV (Assembly, Integration and Verification): AIV activities were completed by GomSpace from April to June 2017 with final environmental qualification performed at ESA/ESTEC in June 2017.
Since the technology demonstration phase of GomX-4B is planned for 6 months, an extra transceiver in the Software Defined Radio for ISL operations is included to extend the lifetime of this satellite by ADS-B data acquisition for commercial purposes.
Project Development Status
• December 20, 2018: GomSpace has signed a 300 k€ development contract with ESA for the initiation of a new GOMX-5 satellite mission to demonstrate new nanosatellite capabilities for the next generation of constellations requiring high speed communications links and high levels of maneuverability. 8)
- “We are happy that we with the support from ESA can continue with the next chapter of our very successfully GOMX flight demonstration program. With the GOMX program we continuously develop and demonstrate new capabilities for nanosatellites that our customers can depend on for their future programs”, says Niels Buus, CEO of GomSpace.
- The mission will consist of two nanosatellites in the 20kg class with an improved platform for increased power handling and reliability. Further, the satellites will be equipped with a number of advanced communication technology payloads to be announced after final selection.
- The present contract covers design and specification work planned for 2019 and is expected to be followed by additional contracts for the subsequent implementation. Launch for the GOMX-5 mission is foreseen to be in 2021.
• November 23, 2017: The majority of tests were made at GomSpace and other facilities in Denmark, apart from thermal–vacuum testing – ensuring that the CubeSats can withstand the hard vacuum and temperature extremes of low orbit – which took place at ESA/ESTEC in the Netherlands (Ref. 13).
• In October 2016, GomSpace ApS completed the acquisition of NanoSpace AB. GS Sweden AB, the parent company of GomSpace ApS, has agreed with the Swedish Space Corporation (Svenska rymdaktiebolaget, SSC), to acquire 100% of the shares of NanoSpace AB, a wholly owned subsidiary of SSC. 9)
• Qualification Acceptance Review: June 2017
• CDR (Critical Design Review): January 2017
• PDR (Preliminary Design Review): May 2016
• Kick-off: November 2015
Launch
The two GomX-4 nanosatellites were launched as secondary payloads on 2 February 2018 (07:51 GMT) on a Long March 2D vehicle from JSLC (Jiuquan Satellite Launch Center), China. The primary mission on this flight was CSES-1 (China Seismo-Electromagnetic Satellite-1) of CNSA (China National Space Administration) and ASI (Italian Space Agency). The primary mission (730 kg) is also referred to as Zhangheng-1, named after the Chinese polymath, astronomer and pioneering seismologist Zhang Heng. 10) 11) 12) 13)
The two GomX-4 satellites are integrated together in a 12U deployer procured from Astrofein (Astro- und Feinwerktechnik GmbH) Berlin Adlershof, i.e. the satellites will be deployed in the same direction with a small time-delay between.
The CSES satellite mission is part of a collaboration program between CNSA ( China National Space Administration) and the Italian Space Agency (ASI), and developed by China Earthquake Administration (CEA) and Italian National Institute for Nuclear Physics (INFN), together with several Chinese and Italian Universities and research Institutes.
Orbit: Sun synchronous orbit, altitude of ~500 km, inclination of 97.32º, period = 94.6 minutes, revisiting period = 5 days, LTDN (Local Time on Descending Node) at 14 hours.
Secondary Payloads
• ÑuSat-4 and NuSat-5 microsatellites of Satellogic S. A.,Argentina, each with a mass of 37 kg to provide commercial high-resolution imagery (1 m).
• GomX-4A and GomX-4B 6U CubeSats (each with a mass of 8 kg), a technology tandem mission of the Danish Ministry of Defence and ESA, respectively.
• Fengmaniu 1, an Earth observation satellite of CNSA.
• YouthStar sponsored by CNSA, a 2U CubeSat, referred to as Shaonian Xing, roughly translating to 'Junior Sat' or 'Youth Sat', a result of China's Teen Satellite Project.
Mission Status
• February 26, 2021: GomSpace and J.P. Morgan have successfully utilized the GOMX-4 satellites for an in-orbit demonstration (IOD) and tested tokenized value transfer in space. The IOD from GomSpace enabled J.P. Morgan to test the world’s first bank-led tokenized value transfer in space, executed via smart contracts on a blockchain network established between satellites orbiting the Earth. 14)
- GomSpace and J.P. Morgan successfully executed a transaction between two LEO satellites, which validated the approach towards a decentralized network where communication with Earth is not necessary. This breakthrough opens the door to a potential peer-to-peer DvP (data versus payment) satellite marketplace in the long term, as private companies prepare to launch their own constellations.
- The project was made possible due to GomSpace’s GOMX-4 satellites already on-orbit and which are highly reconfigurable. This allows GomSpace to provide rapid on-orbit demonstrations, such as this project, as a service to the firm’s customers exploring new uses of space technology and the company’s smallsats.
- “We are proud to have supported J.P. Morgan as they explored this novel use case of a space-based payment infrastructure utilizing blockchain technology,” said Niels Buus, the CEO of GomSpace.
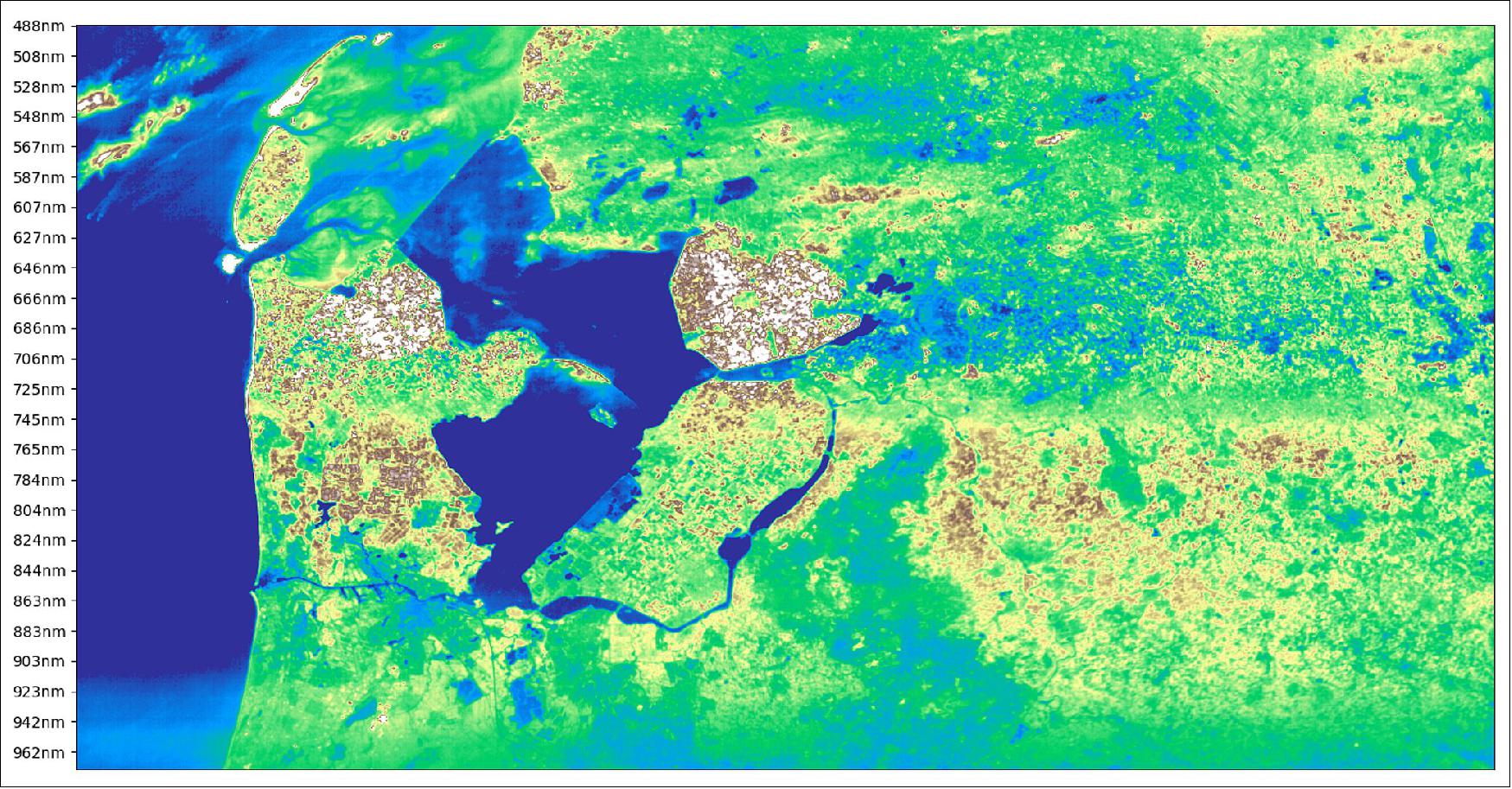
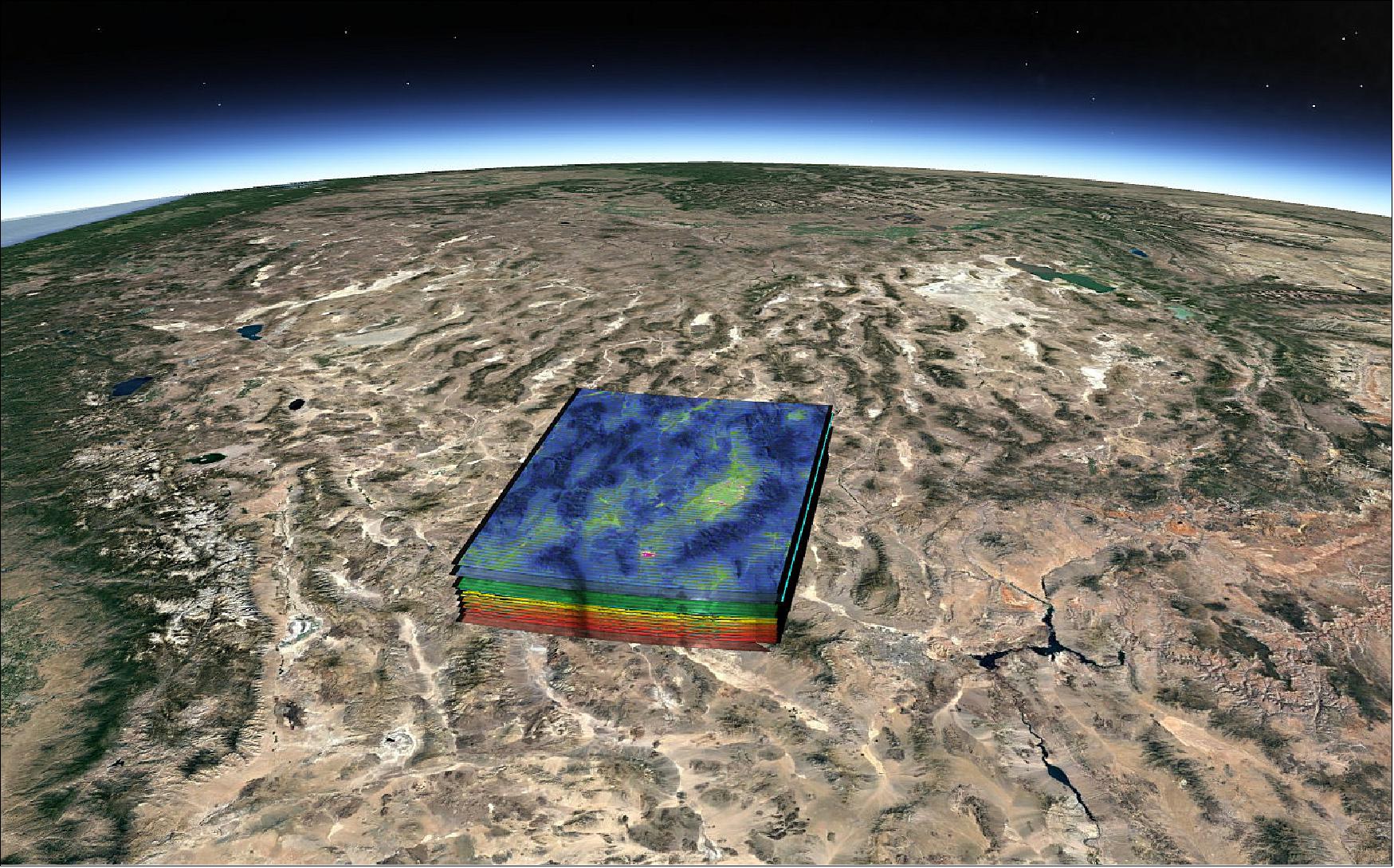
• May 20, 2020: This cloud-free image of the northern Netherlands during lockdown comes from a camera the size of a milk carton, aboard a satellite the size of a shoebox. 15)
- The HyperScout imager on ESA’s GomX-4B CubeSat combines multiple image frames like these to produce hyperspectral views of its target, combining more colors than the human eye can perceive to yield much richer environmental information than standard optical satellite acquisitions.
- “HyperScout reached orbit with GomX-4B back in February 2018, and acquired its first image a little over two years ago,” explains project manager Marco Esposito of the Netherlands-based cosine Measurement Systems, the company that designed and built HyperScout in collaboration with ESA.
- “We are pleased that our compact but powerful instrument is still operating well, demonstrating its reliability. Acquiring up to 45 visible and near-infrared spectral bands, HyperScout is well suited to monitor vegetation and crop health, water quality and land cover change detection in general. Scientists have been eager to make use of its data, with scientific papers on the way.”
- HyperScout’s April 2020 image of its Dutch homeland demonstrates its wide footprint, measuring approximately 200 x 150 km. This is possible from such a small imager thanks to years of ESA-led research, to shrink down a complex assemblage of precisely curved ‘three-mirror anastigmat’ mirrors to a sufficiently small scale.
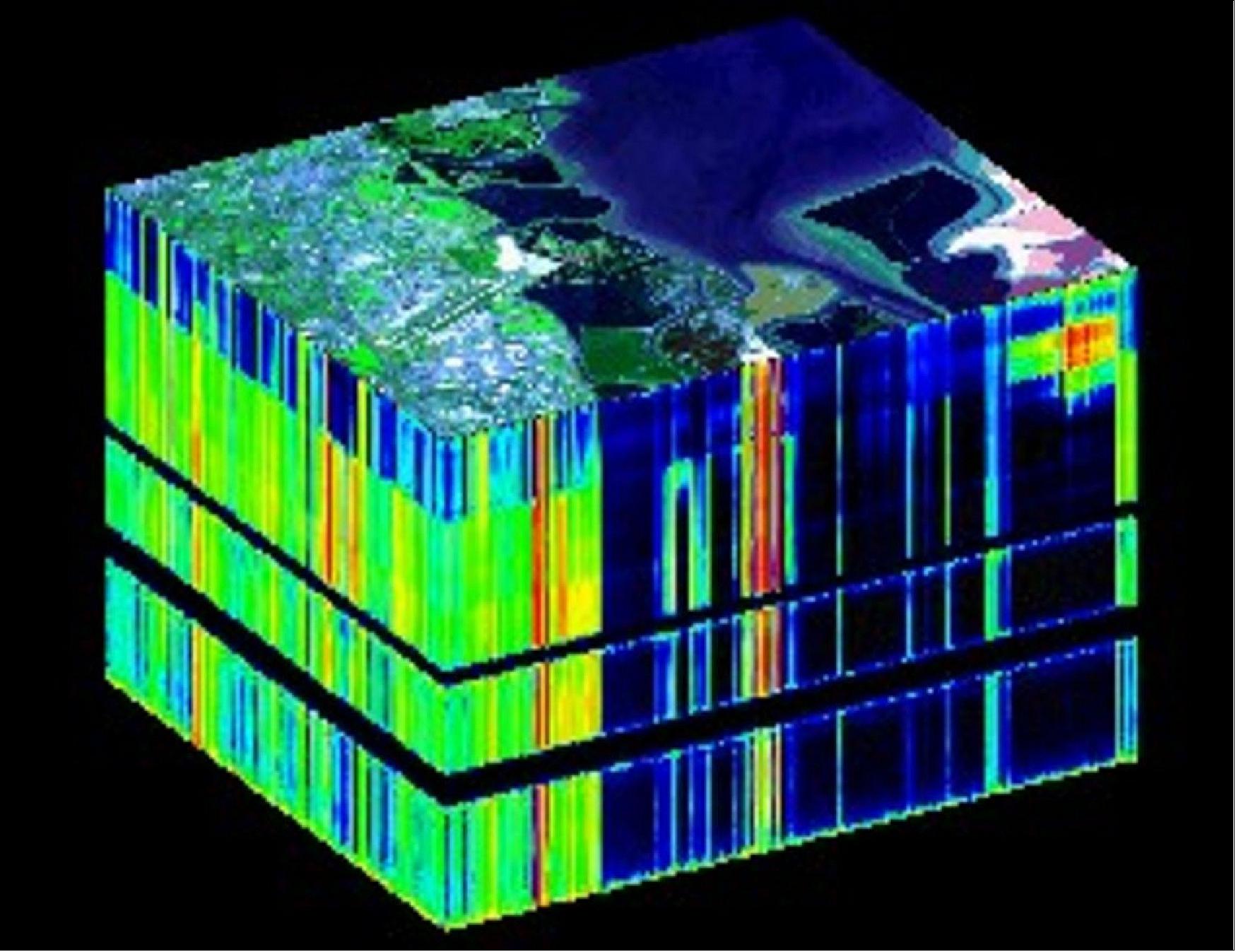
- Each line making up a HyperScout image is acquired in a different spectral band,” explains ESA optical engineer Alessandro Zuccaro Marchi. “The imager takes advantage of the onward orbital motion of its host CubeSat so that these lines overlap, to build up a complete hyperspectral ‘image cube’.”
- Marco Esposito adds: “The resulting hyperspectral image is very large in terms of data volume, so HyperScout is able to perform its own onboard image processing and data compression.
- “This means less data need to be downlinked to the ground, to stay within the limited bandwidth of such small satellite platforms. Data users, for instance, might review a sample image, then decide to focus only on a smaller area of interest, such as a vegetated regions. HyperScout can then customize its hyperspectral data for downlink accordingly.”
- Luca Maresi, Head of ESA's Optics section, explains that “even though HyperScout is a tiny instrument, its complexity is equal to much larger systems. It was developed by an industrial consortium led by cosine, comprising VITO in Belgium, S&T in the Netherlands, and Technical University of Delft.
- “The consortium worked in close collaboration to provide the HyperScout with the capabilities to perform real-time on-board data processing, a task that usually requires days of computation by powerful on-ground computers.”
- HyperScout’s development was supported through ESA’s General Support Technology Program (GSTP), advancing promising technology for space, which also found it an early flight opportunity aboard ESA technology CubeSat GomX-4B developed by GomSpace in Denmark.
- “The product has already found commercial success in the international marketplace,” adds Marco, “and an enhanced version, HyperScout2, developed with the ESA Earth Observation Φ department, is due to be launched this summer as part of Spain’s FSSCat mission, aboard ESA’s inaugural Vega Small Spacecraft Mission Service launch.”
- The enhanced HyperScout 2 offers even more processing performance through the use of the Movidius processing board, based on Intel Ireland's new Myriad 2 artificial intelligence chip, developed within the frame of GSTP's Fly element. HyperScout 2 also features an additional thermal infrared channel, developed through cooperation with the Φ department and the F-lab of ESA's Earth Observation Program.
- Marco notes: “One of the mission goals is to see the results of this extra processing power and capability in terms of power efficiency.”
- HyperScout imagery has also been cross-calibrated with multispectral views from the full-sized Copernicus Sentinel-2 satellite as part of the ESA Φ-lab MATCH activity. HyperScout with its wide field view and numerous spectral bands offers complementary information to such larger satellites.
- A small constellation of satellites with HyperScout would provide hourly revisits of areas of interest, such as densely populated regions, offering a novel service at a cost that no other satellite can match.
• October 17, 2019: OQ Technology, a Luxembourg-based satellite IoT (Internet of Things) and M2M (Machine-to-Machine) service company, has successfully tested Narrow-Band IoT waveforms and synchronization procedures using a third-party smallsat. 16)
- The Tiger mission, which was approved and signed on July 26, 2019, demonstrates that NB (Narrow Band)-IoT technology can be used on flying Software-Defined Radio (SDR) payloads by uploading the waveforms to test the performance, paving the way for using Software-Defined Radio payloads as a service to provide connectivity.
- The satellites used are GOMX-4A and GOMX-4B from GomSpace. NB-IoT is a Low Power Wide Area Network radio technology standard developed by the 3rd Generation Partnership Program (3GPP) to enable a global standard for IoT and M2M connectivity as a part of its Release 13 specifications (LTE Advanced Pro) in June 2016.
- As of 2019, the Global mobile Suppliers Association has identified more than 160 operators across 69 countries investing NB-IoT network technologies. The 3GPP ecosystem is a global consortium backed by several telecommunication associations from countries such as Japan, USA, China, Europe, India, South Korea, and contributions coming from more than 680 individual member companies such as Qualcomm, Nokia, Ericsson, Apple, Google, ZTE, Huawei, NEC, Samsung, AT&T, Verizon, etc. that sell equipment, chipsets, software, handsets connectivity and other services in the global telecommunications market.
- As a natural evolution of technology and market trends, 3GPP has foreseen the growing demand for global IoT connectivity and has retained NB-IoT as a part of its 5G standards (Release 15) and is working towards expanding the technology’s potential using Non-Terrestrial Network (NTN) services for its release 17 which is expected to be rolled out by 2021/2022. NTN services leverage the use of non-terrestrial entities such as satellites in LEO, MEO, GEO, High Altitude Platforms and drones to extend coverage, service and capacity for mobile telephony, IoT and M2M connectivity.
- OQ Technology began working on cutting edge R&D in 2016 to provide NB-IoT connectivity over LEO satellite, a standard with worldwide ecosystem and backed up by a global mobile standardization body. OQ Technology is targeting the cellular IoT communication market, as well as the Oil & Gas, Maritime, Industry 4.0, and Transport segments, particularly for the management and tracking of assets in remote areas. Whether this is digital oilfield applications, offshore monitoring, SCADA applications, asset tracking, fleet management, smart metering or predictive maintenance.
- NB-IoT is a challenge for LEO due to high Doppler and delay environments. OQ Technology has successfully performed a “first-in-the-world” test of a 5G IoT technology over cubesats, and a “first” in using Orthogonal-Frequency-Division Multiple Access waveforms in a smallsat. OQ Technology will further experiments as a part of the Tiger mission over the next 3 months to optimize the link and system performance. OQ Technology aims to be a global 5G massive machine-type communications service provider to enable mobile operators extend their coverage beyond urban areas. The technology development has been partly supported by Luxembourg government through the LuxIMPULSE program.
• March 5, 2019: As the space economy is switching from single satellite infrastructures to constellations of affordable small satellites, network elements inevitably increase in complexity. 17) 18)
- The companies 2Operate and GomSpace, both of Aalborg Denmark, together with Aarhus University, are working together within the MegaMan project, funded by Innovation Fund Denmark, to evaluate how existing telecom standards and existing artificial intelligence (AI) solutions developed for the terrestrial telecom sector can be leveraged to manage future satellite constellations robustly and efficiently.
- As part of the collaboration, the partners have successfully evaluated 2Operate's existing AI-based 2Solve product using the GOMX-4 satellite mission by GomSpace and the Delfini-1 mission by Aarhus University.
- The use of 2Solve and AI for satellite constellation management help reduce the amount of operator hours required to manage satellite constellations by reducing work-load for network monitoring and for root-cause-analysis tasks, as the AI is trained using expert knowledge to automate these tasks. Further, the automation of these functions means that network incidents can be resolved much faster leading to higher availability of the satellite services.
- Based on the successful trials, 2Operate and GomSpace have signed an MoU to strengthen the companies' collaboration and to prepare introduction of the 2Solve AI-capabilities through GomSpace's Mega-Constellations Operations Platform (MCOP) being introduced by GomSpace's subsidiary in Luxembourg.
- "It is very exciting for us to see how the lessons learned from the terrestrial telecom sector can boost the uptake of advance network management solutions for space - and how well our product adapts to the new requirements", says Christian Ingerslev Sorensen, CEO of 2Operate.
- "Being able to operate satellite constellations 24/7 with the highest availability is a key capability for GomSpace, and being able to integrate proven solutions reduces both risk and required investments", says Niels Buus, CEO of GomSpace.
- 2Operate and GomSpace last week jointly exhibited at the World Mobile Congress in Barcelona, Spain, showcasing how the application of the 2Solve product applied to satellite mission management.
• December 24, 2018: The cereal-box sized GomX-4B – ESA’s biggest small CubeSat yet flown – has completed its mission for the Agency, testing out new miniaturized technologies including: intersatellite link communication with its GomX-4A twin, a hyperspectral imager, star tracker and butane-based propulsion system. 19)
- “This multifaceted little mission has performed extremely well in flight,” says Roger Walker, overseeing ESA’s Technology CubeSats. “What its results demonstrate is that European CubeSats are now ready for operational deployment, as the first generation of CubeSat constellations in low Earth orbit for a variety of applications.
- “So our post-flight review has declared ESA’s in-orbit demonstration mission a success, but in fact GomX-4B’s story is far from over. GomSpace, the manufacturer of the satellite, continues to operate the nanosatellite, while GomSpace’s subsidiary in Luxembourg will be in charge of mission exploitation.”
- Much quicker to build and cheaper to launch than traditional satellites, ESA is making use of CubeSats based on standardized 10 cm boxes for testing new technologies in space.
- GomX-4B was ESA’s first six-unit CubeSat, double the size of its predecessor GomX-3, built for ESA by GomSpace in Aalborg, Denmark, also the builder of GomX-4A for the Danish Ministry of Defence. The CubeSat pair was launched on 2 February from Jiuquan, China.
- GomX-4B used its butane cold gas propulsion system to maneuver away from its twin, flying up to 4,500 km away in a fixed geometry – a limit set by Earth’s curvature, and representative of planned CubeSat constellation spacing – to test intersatellite radio links allowing the rapid transfer of data from Earth between satellites and back to Earth again.
- Supplied by the Swedish branch of GomSpace, the propulsion system allows the CubeSat to adjust its orbital speed in a controlled manner by a total of 10 m/s – a speed equivalent to a kicked football. “Despite all our orbital maneuvers, GomX-4B still has a lot of fuel,” comments Roger. “Of the original 130 grams of butane, only 13 grams were consumed during the mission.”
- In another first, GomX-4B acquired the first hyperspectral images of Earth from a CubeSat. Cosine Research in the Netherlands and its partners constructed the hand-sized HyperScout imager for ESA. This divides up the light it receives into many narrow, adjacent wavelengths, gathering a wealth of environmental data.
• December 18, 2018: When flying a satellite that captures images of Earth, it seems logical to download the data and process it on Earth. However, there is a strong trend towards smaller satellites with smarter instruments, and small satellites simply do not have enough bandwidth to download all the collected data to Earth. Fortunately, this is not necessary anymore. HyperScout 1, launched on the GOMX-4B satellite in February 2018, is able to analyze the data on board. “We specifically developed the hardware and software for HyperScout to make this possible”, explains Marco Esposito, manager of the remote sensing unit of cosine, the company that developed HyperScout. 20)
- Bavo Delauré, project manager of Belgian institute VITO, adds: “The algorithms are derived from our developments for the PROBA-V mission. PROBA-V data is, however, processed on the ground in a large data center so the algorithms were tailored for implementation onboard the cubesat-instrument.” S&T Norway developed the onboard software that enables HyperScout to run complex algorithms, such as the ground-based VITO algorithm. The software was uploaded to the satellite after launch.
- The HyperScout instrument took about one minute to process the images into Analysis Ready Data in orbit. Downloading the raw data would have taken several weeks from a nanosatellite. Even for larger and more expensive platforms, the data downlink can take several hours. Marco Esposito of cosine points out: “The on-board processing made possible by HyperScout enables a paradigm shift in the use of a space asset, by serving application specific customers with realtime information without the need to downlink raw data”.
- HyperScout processes the data on board by correcting for the curvature of the Earth and the angle under which it is observed, so-called orthorectification, and determines which position on the ground corresponds to the pixels in the camera, called georeferencing. It also corrects for the sensitivity of the instrument in the different wavelengths it observes. With this information available, it is possible to analyze the images on board. Therefore, customers can ask to run their analysis algorithm on this data on board, and the software can be uploaded at any time during the mission. This way new algorithms can be implemented, for example to detect fires, flooding or irrigation needs.
- HyperScout was developed by an international consortium led by cosine with partners S&T, VITO, TU Delft and VDL. The development and launch of the first HyperScout was funded through the ESA GSTP program with contributions from the Dutch, Belgian and Norwegian national space organizations (Netherlands Space Office, BELSPO and Norsk Romsenter).
• October 2018: Orbit control for nanosatellite formation flying. For the GOMX-4 mission, orbit control has been demonstrated by the use of a combination between differential drag control and propulsion. The GOMX-4A and -4B satellites are flying in a tandem formation, where the relative distance between them is required to be controlled in order to perform IOD (In-Orbit Demonstration) and verification of inter-satellite radio link. GOMX- 4A is maneuvered by using differential drag and the GOMX-4B satellite is equipped with the NanoSpace 6U cold gas propulsion module. The relative distance between the two satellites are controlled by a series of prograde and retrograde thrusting maneuvers, adjusting the orbit semi-major axis and thereby also the orbit velocity of GOMX-4B. 21)
- After the final thrusting maneuver, station-keeping maneuvers are performed by the use of differential drag maneuvers between the satellites. By varying the relative satellites surface area, the decay rate can be adjusted and varying the satellites semi-major axis and thereby the change in relative distance. Hereby, station-keeping can be made without the use of cold gas thrusters, to mitigate for relative drift caused by control errors and mass differences between the satellites.
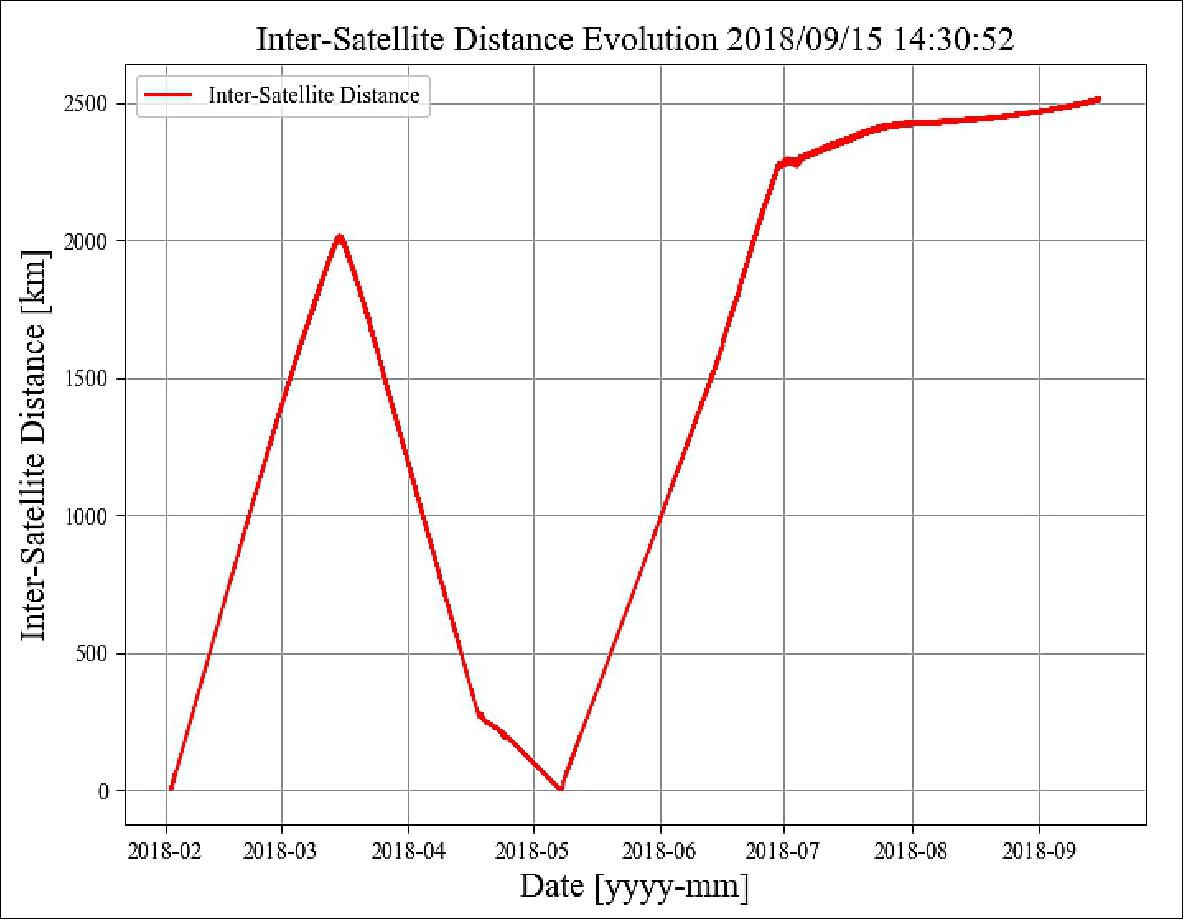
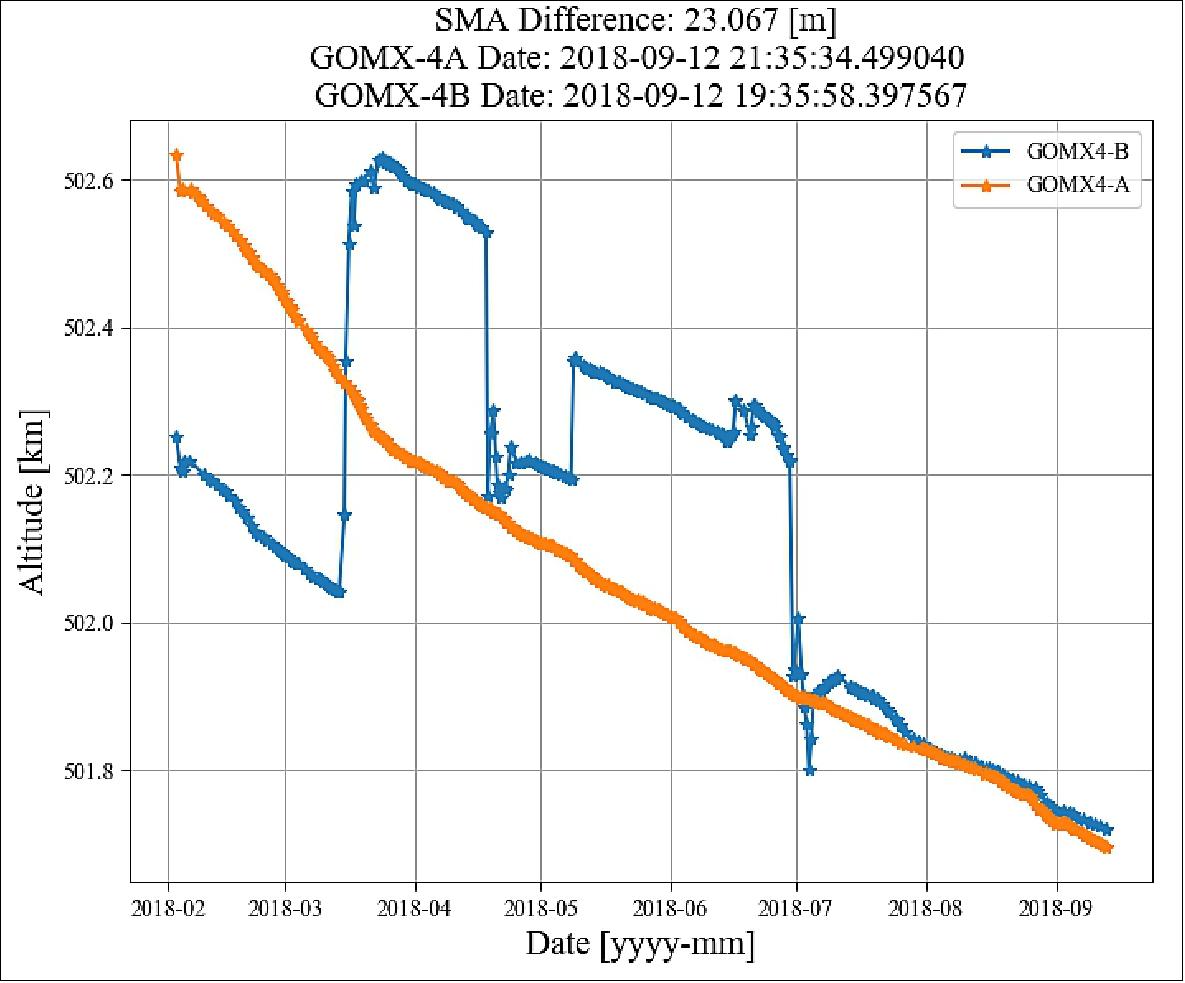
- GOMX-4 orbit maneuvers: Drag management using different drag surfaces in both satellites and the propulsion module on-board GOMX-4B conform the two main ways to control the orbital evolution of the satellites and in particular the distance between them. As expected before launch, the satellites were injected by the launcher into two slightly different orbits with a difference in semi-major axis of approximately 300 meters, mainly due to the fact that there was a span of 30 seconds between the deployment of both satellites. This difference, which was quickly confirmed after launch, may seem small but leads to a difference in orbital period that produces a relatively quick drift between the satellites.
- During the first few weeks after launch (February 2nd 2018), the altitude difference led to a drift of approximately 50 km/day. Once full-on attitude control was established, GOMX-4A and GOMX-4B followed a high-drag and low-drag attitude mode, respectively, in order to decrease the altitude of -4A relative to -4B and slow down the drift. This process proved to be slow, decreasing the drift rate to approximately 40 km/day as of March 14th 2018. The inter-satellite distance was already around 2,000 km at this point and the Inter-Satellite Link (ISL) required a shorter distance for running initial tests, hence it was decided to use the thrusters on-board GOMX-4B to raise its orbit and revert the sense of the drift.
- Figures 10 and 11 show the evolution of the intersatellite distance and the altitude of both satellites, respectively, since launch until now.
• August 2018: After 6 weeks of commissioning operations and with the ADCS in-orbit calibrated, the propulsion payload was commissioned to perform orbit control of the GomX-4B satellite (Ref. 4).
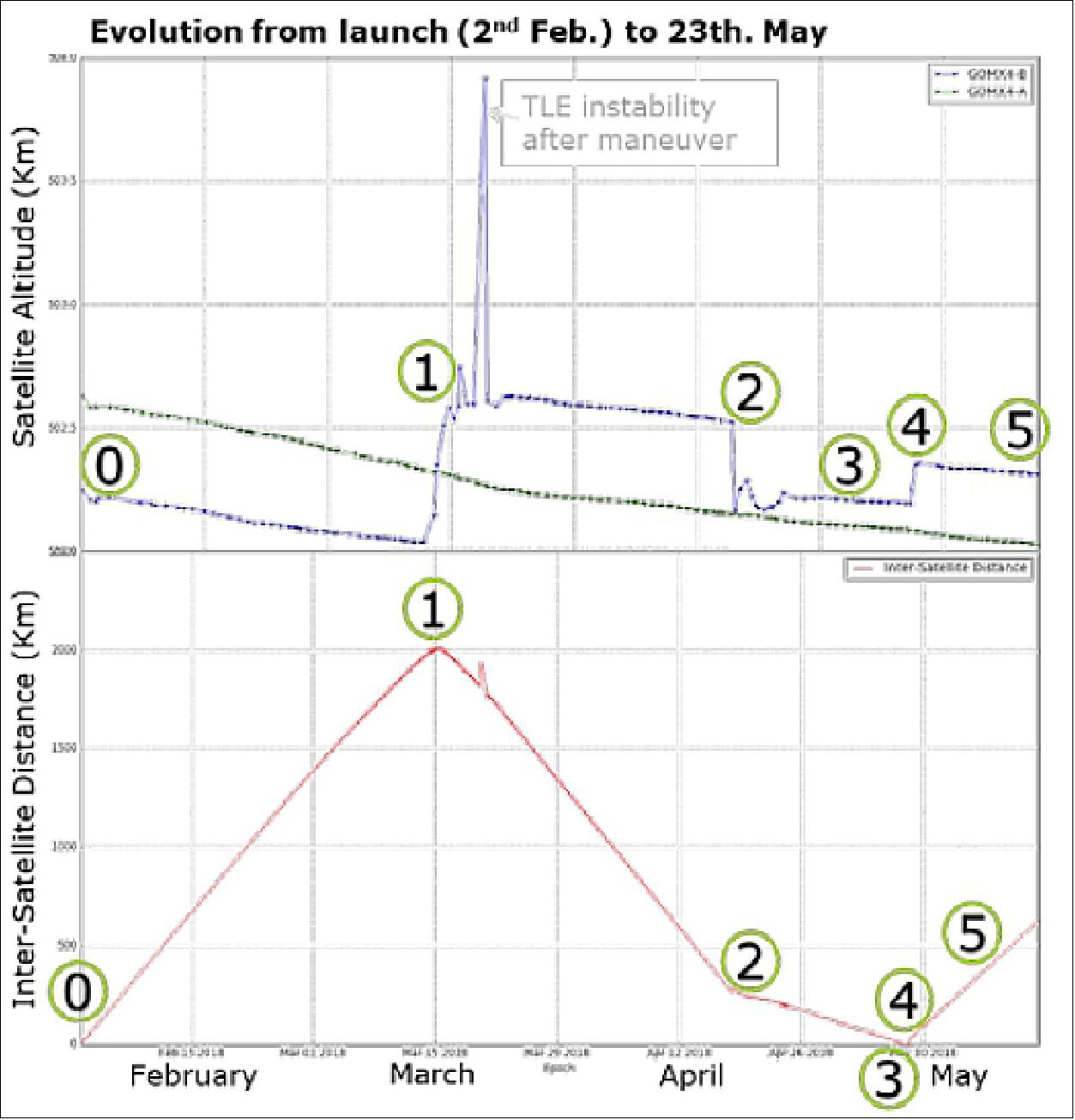
- The figure 12 shows the orbit altitude and inter-satellite distance of the two GOMX-4 satellites identifying the following relevant changes:
Step 0.- Initial deployment of the two satellites from the launcher, releasing GOMX-4B 30 seconds after GOMX-4A. This sequence placed GOMX-4B in an orbit 340 meters below GOMX-4A causing a fast drift between the satellites of around 60 Km separation increase per day.
Step 1.- The Propulsion module commissioning and the first maneuver to correct the initial drift was split in three steps. Firstly, the system health was checked by activation and telemetry tracking and, then, first short prograde burning of all the thrusters during 1 minute of duration evaluating the orbit change. Once the satellite raised its orbit altitude as expected, the thrusters were burnt for the rest of 9 minutes and 10 seconds until the satellite reached an altitude 350 meters above GOMX-4A. This reversed the drift of the satellites targeting between 250 and 300 km of separation distance in 1-month timeframe for the operations phase. During this month, payloads were commissioned, and the In-Orbit Commissioning Review was performed for the operations kick-off.
Step 2.- The corresponding retrograde burning was performed burning the thrusters during 7 minutes until GOMX-4B reached similar altitude than GOMX-4A within an accuracy between 150 and 50 meters according to the TLEs.
Step 3.- The altitude difference within the achieved accuracy of the maneuver caused a slow drift of the satellites towards one other. At this point, the satellites decreased their separation distance until GOMX-4A passed GOMX-4B allowing the use of ISL without changing the nominal RAM attitude due to the advantage of 2 ISL patch antennas included in GOMX-4A.
Step 4.- After reaching the minimum inter-satellite distance, a new prograde maneuver was performed burning for 3 minutes and 24 seconds to raise GOMX-4B around 300 meters above GOMX-4A. This maneuver was planned to set the initial separation distance and drift for the ISL experiments in the first phase of payloads operations.
Step 5.- The mission operations phase starts with a separation rate of around 35 Km per day to perform the first phase of ISL tests, evaluating the link from 250 km up to 1500 km within 1-month timeframe.
The use of this 6U propulsion module for first time has showed very successful results with a good orbit control and high accuracy in the reached total thrust. The satellite behavior shows very similar response than the simulations performed with GMAT.
One of the main lessons learned about these propulsion maneuvers is the saturation of the reaction wheels at 4000 rpm which has been reached during firing longer than 3.5 minutes. Therefore, all the burning performed in this mission has been split into several consecutive steps of less than that duration until the desired total burning time and targeted orbit is reached.
On the other hand, the accuracy of more than 50 meters for the propulsion maneuvers could be improved using the GPS signal, which was used only during the first prograde maneuver (step 1) for payload evaluation. After the competition of the first phase of ISL testing, the propulsion module will be used for station keeping with higher accuracy requirements where the GPS data will be added in the AOCS for a more accurate control.
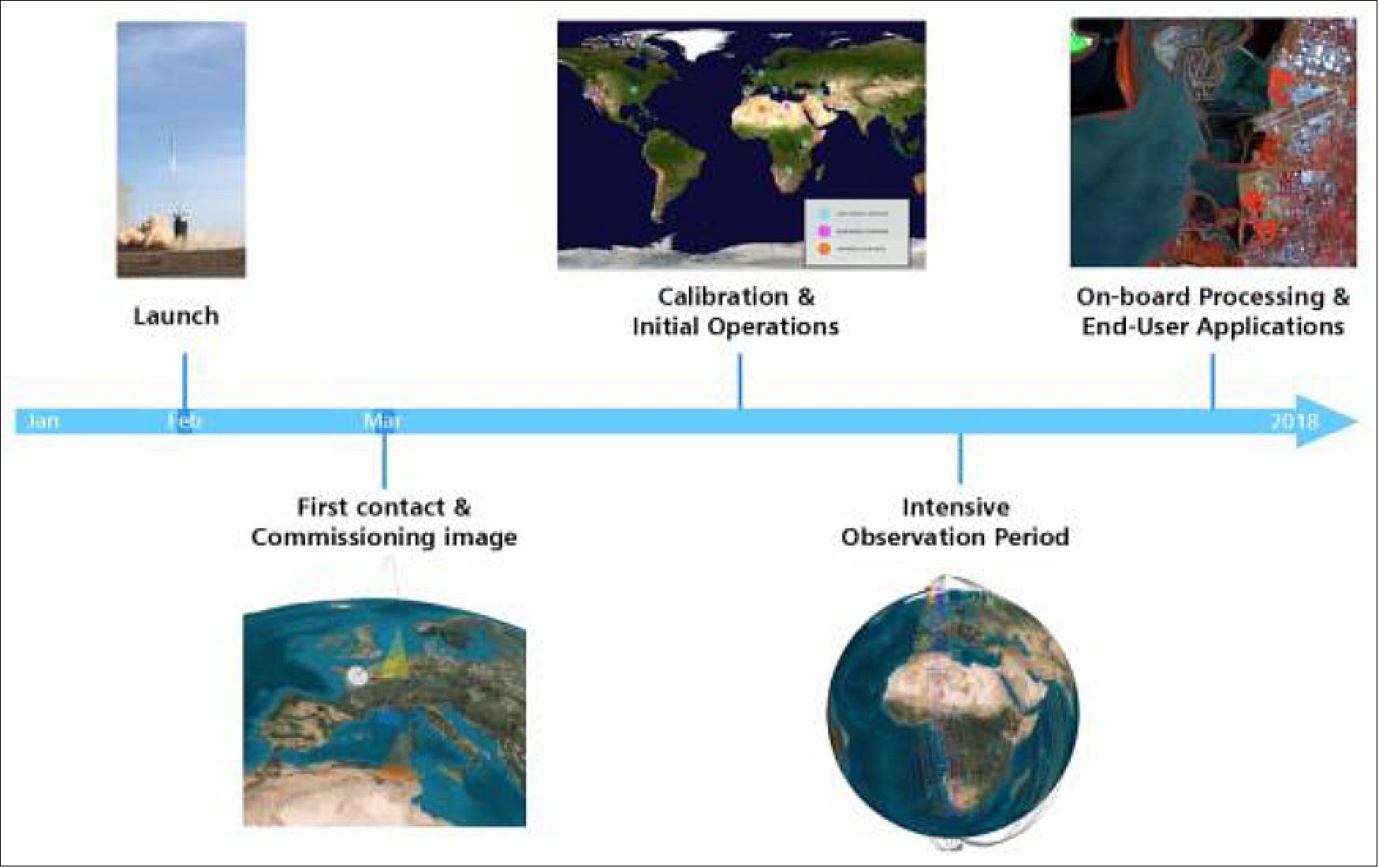
• August 2018: The HyperScout® commissioning was performed following the GOMX-4B satellite main subsystems commissioning. The HyperScout® commissioning phase aimed at validating the payload functionality chain, from acquisition to compression and downlink to the ground, and assesses the status after launch and after the first weeks of space environment exposure. The payload is therefore powered ON, communication established with the S/C subsystems and a single frame is acquired. The operations sequence for the first commissioning image is depicted in Figure 13. During the orbit 704 HyperScout is configured for the acquisition, during orbit 705 the actual acquisition takes place. Data are downloaded during subsequent contacts with the ground station. 22)
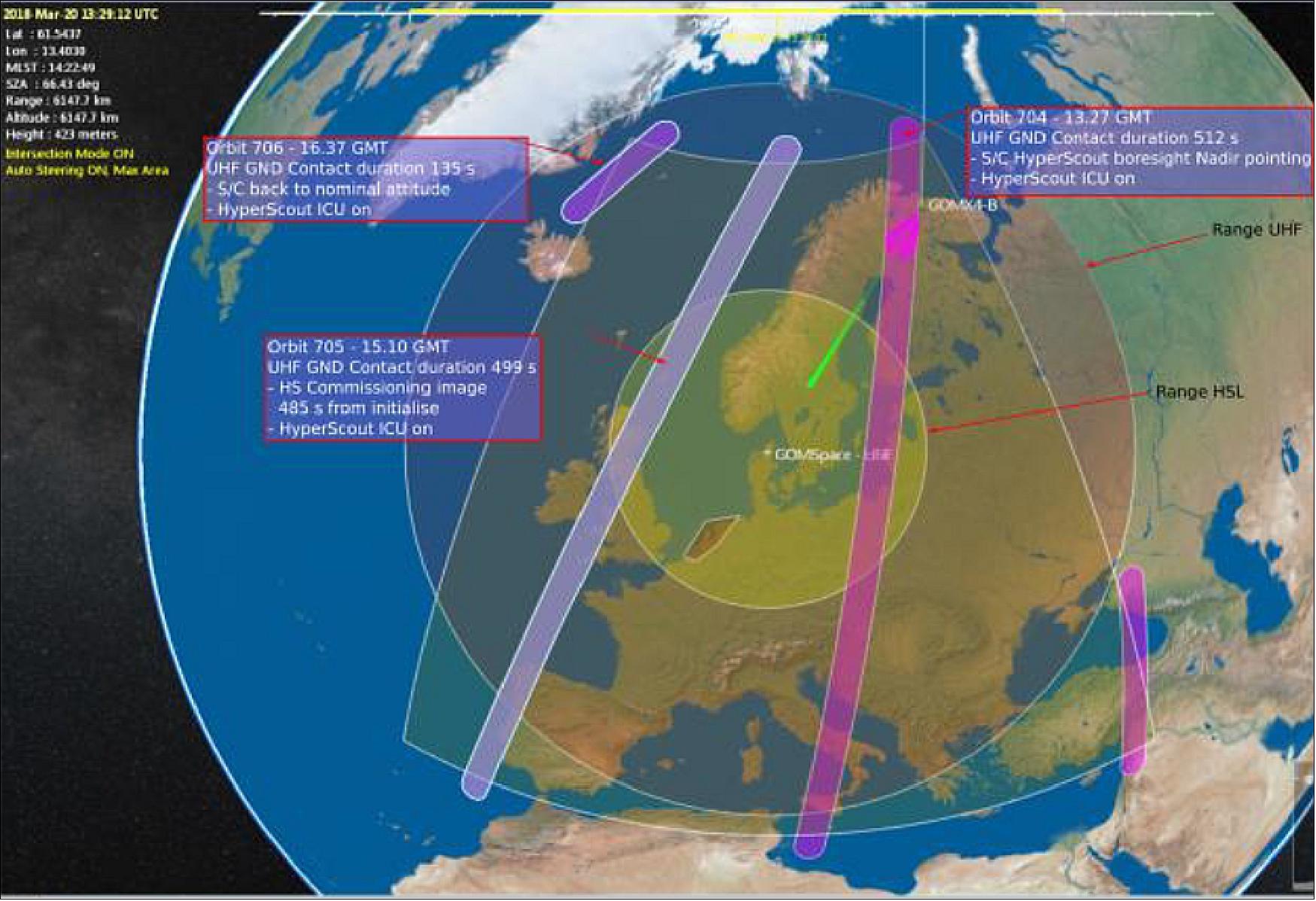
- Being a single image, each horizontal line shows the scene at a different spectral band. The first light image has been software binned 2x2 and compressed in order to fit within the 1.5 MB allowed data volume requirement dictated by the satellite resources available during the commissioning phase. The image is rendered with false colors based on raw data, therefore the expected effects due to the spectral filtering, the presence of the atmosphere and the solar spectrum are visible as variation of the response along track. This effects will be later calibrated as part of the processing chain. The imaged region is selected randomly based on weather conditions. The first light of the HyperScout® was taken over Scotland and is presented in Figure 14.

- During the first commissioning image acquisition a race condition in setting the region of interest on the sensor prevented acquiring a full frame. This resulted in cropping the image on the sensor covering only the 400-600 nm spectral bands. This issue was swiftly identified and fixed in order to acquire a second commissioning image, which resulted the full frame image over Cuba, shown in Figure 18.
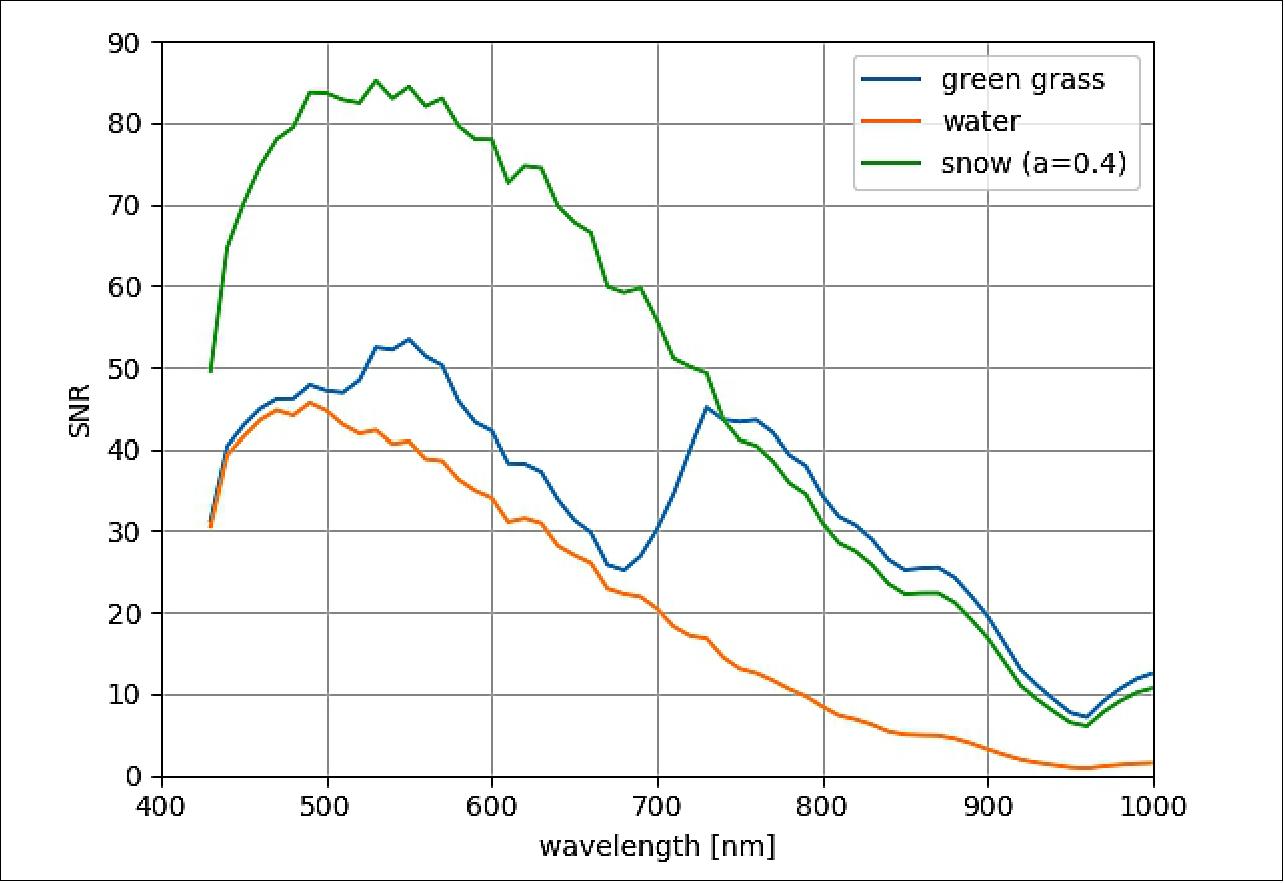
- The frames acquired are binned and have not been calibrated, however a first check on the response shows consistency with typical responses over water. The red curve in Figure 8 shows the typical water response, while Figure 16 shows the relative response of HyperScout.
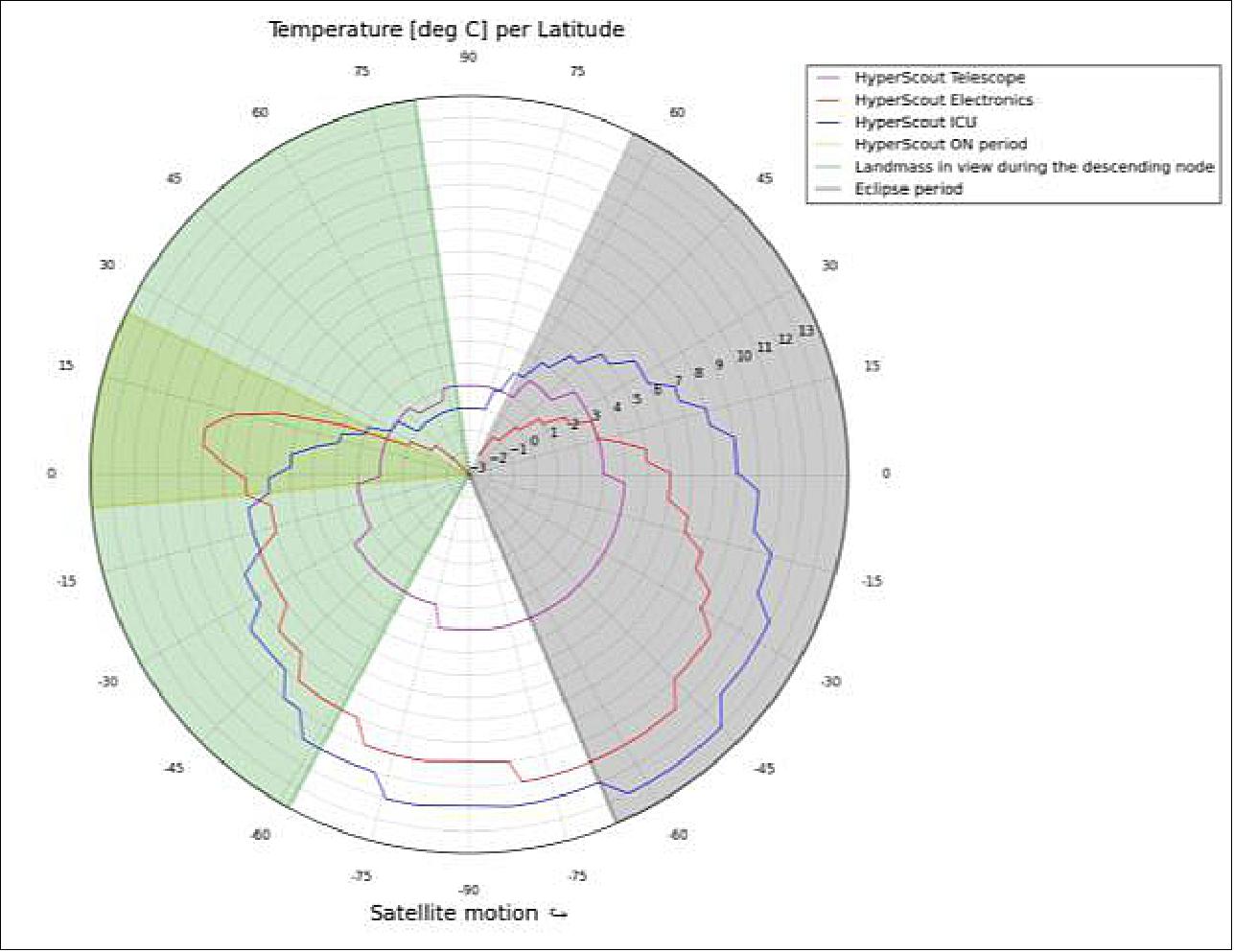
The polar plot in Figure 16 describes the temperature of three main subsystems, the HyperScout® telescope, the ICU (Instrument Control Unit) and the BEE (Back-End Electronics). The log starts and ends with the spacecraft out of eclipse, indicated by the grey area. HyperScout® is equipped with an athermal telescope thermally isolated from the platform by design, and the measured temperature data is stable within 2.5°C over the section of the daylight revolution covering the landmass. The other subsystems do not experience a large temperature variation, considering that they include electronics units that are turned ON for a limited time period.
Together with the image, the HyperScout® housekeeping data was downlinked. All the systems logs are nominal while the subsystems temperatures are presented in Figure 17.
• April 18, 2018: ESA’s latest mission has completed its in-orbit commissioning. The cereal-box-sized GomX-4B performed a transfer of data across hundreds of kilometers of space from its Danish twin. 23)
- On 2 February, the two GomX-4 CubeSats piggybacked to space into a 500 km altitude near-polar orbit after launch on a Long March 2D rocket from Jiuquan, in China’s Gobi Desert.
- Both of the nanosatellites were built by GomSpace in Denmark. GomX-4A, financed by the Danish Ministry of Defence, is focused on monitoring and imaging Denmark’s Arctic territory. The ESA-backed GomX-4B is testing a micro-propulsion system as well as an inter-satellite radio link with its counterpart. It also carries other technology payloads, including a hyperspectral imager.
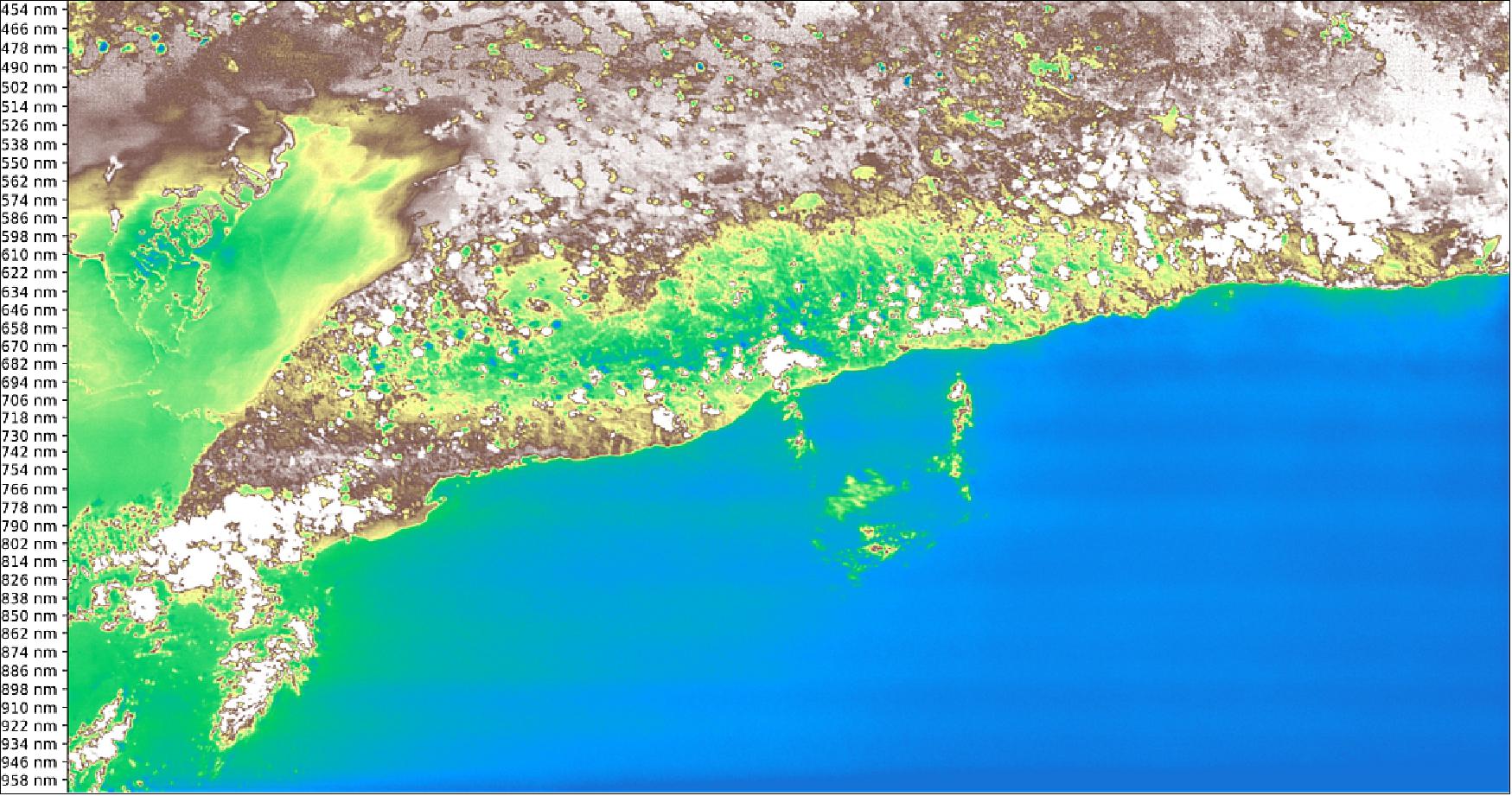
Legend to Figure 18: Color equals information, so the more spectral bands an Earth-observing instrument sees, the greater quantity of environmental findings can be returned to its homeworld. “Far more compact than previous hyperspectral imagers, HyperScout can observe in 45 visible and near-infrared spectral bands,” explains ESA optics engineer Alessandro Zuccaro Marchi. “This is a single image with a footprint of approximately 200 x 150 km2 where each horizontal line shows the scene in a different spectral band, proving the overall functioning chain of the HyperScout works as planned – from acquisition to compression and downlink to the ground.” - Marco Esposito of cosine Research adds: “This is very much a raw image, including atmospheric and solar effects that would normally be corrected as part of the full calibration and processing chain. It also has undergone compression and pixel ‘binning’ to fit the limited satellite power and memory resources available during commissioning. But the amount of light captured here exceeds our expectations, suggesting a very promising signal-to-noise ratio is achievable for hyperspectral applications. We’re very pleased with this ‘first light’ view, and follow-up images will explore HyperScout’s hyperspectral capabilities.”
- GomX-4A carries no thrusters but the agile GomX-4B used its micro-thrusters to shift its orbit relative to its twin. The satellites drifted up to 2000 km apart along their orbit, then GomX-4B performed a series of maneuvers to reduce the separation distance back to 300 km. This allowed the pair to begin testing their radio link across various distances up to 750 km away. Later in the mission, this distance will be increased up to 4500 km for extended range tests.
- Demonstrating transfer of data between the satellites is extremely valuable. First, it increases opportunities to get images and data down to the ground from the two satellites. But it also points to future possibilities – when an inter-linked constellation of nanosatellites could cover much more territory than any single satellite, and return data to users on the ground much faster, often making it more useful.
- GomSpace showed the satellites in action for the first time during a live press conference from their Aalborg headquarters on 12 April. The retrieval process from GomX-4A to GomX-4B – and vice versa – down to Earth went according to schedule, confirming the satellite pair can share both data and images and send them home.
• Early March 2018: All platform subsystems of GOMX-4A and GOMX-4B were commissioned during the first 3 weeks of operations. There, the on-board computer (NanoMind A3200), the two ground communication links for UHF and S-band (NanoCom AX100 and NanoCom SR2000) and the power subsystem (NanoPower P60) were tracked while performing optimum behavior in any of their different modes and software features (Ref. 4).
- In the same way, every component of the attitude determination and control subsystem was activated and characterized to proceed with the in-orbit calibration and pointing accuracy determination during the 4 weeks after.
- Between the main achievements from the 6U platform components commissioning, it is possible to highlight the optimum MPPT (Maximum Power Point Tracking) mode of the NanoPower P60 which allows to gain around 20% of the input power optimizing the peak voltage and the S-band link with ground station which is successfully established even in elevations below 20 degrees.
• February 5, 2018: A new Danish satellite, GomX-4A (called Ulloriaq, which means 'star' in Greenlandic) has been launched into space to test the monitoring of ships and aircraft in the Arctic region. This is a joint project between DTU [Danmarks Tekniske Universitet (Technical University of Denmark), Lyngby, Denmark], DALO (Danish Defence Acquisition and Logistics Organization) under the Danish Ministry of Defence, and the company GomSpace. 26)
- By 2020, the partners will have determined whether this type of space equipment can contribute to the performance of the Danish Armed Forces by providing better situational awareness in the Arctic. The idea is that the satellite will contribute to the monitoring of the Danish Ministry of Defence’s area of responsibility in the Arctic and form part of the civilian tasks performed by the Armed Forces in the area including sea rescue.
- In connection with the test, the Armed Forces are to evaluate the usefulness of such a satellite system in relation to the possibility of obtaining a better 'situational picture' of the Arctic region in the future.
- The idea is that the satellite is to contribute to the monitoring of the Danish Ministry of Defence’s area of responsibility in the Arctic and form part of the civilian tasks performed by the Armed Forces in the area. Including—for example—sea rescue.
- “The development phase has been exciting. The satellite is fitted with sensors which are now to be tested,” says Charlotte Wiin Havsteen, Head of the Defence Center for Operational Oceanography.
- “On board, there is an antenna for listening for signals from ships and another antenna for listening for aircraft as well as a camera for taking pictures in clear weather in the daytime. Much work has been done to coordinate frequencies with other countries which have satellites in orbit, to make it possible to operate the satellite and receive data in Denmark.”
• February 5, 2018: Approximately 12 minutes after launch on 2 Feb. 2018, both GomX-4 nanosatellites were successfully released from the launcher at an altitude of 503 km in an inclination of 97 degrees. 27)
- At 14:05 GMT, the company established radio contact with the satellites from the company’s HQ in Aalborg (Denmark) and the initial activities to ensure that the satellites are operating as planned have been initiated.
- Testing each of the individual subsystems will begin after initial contact, which is expected to take three to four weeks. Full mission operation will begin in March after completion of subsystems and payload testing.
Sensor Complement
ISL (Inter-Satellite Link)
The ISL demonstrator payload is based on GomSpace SDR (Software Defined Radio) platform product based on the Xilinx Zynq7000 FPGA (Figure 20). The SDR is connected to an active (integrated LNA & PA) S-band patch antenna and the SDR implements a special waveform to allow ISL communication at up to in theory 6 Mbit/s – in practice bit rates are restricted by distance and regulatory aspects.

Propulsion System
ESA’s next miniature satellite will be its first able to change orbit. Thanks to a compact thruster resembling a butane cigarette lighter, the cereal box-sized satellite will fly around its near-twin to test their radio communications. Much quicker to build and cheaper to launch than traditional satellites, ESA is making use of CubeSats for testing new technologies in space. 28)
The main goal is to test the radio link at varying distances, routing data from one satellite to the other, then down to the ground. GomX-4A, from the Danish Ministry of Defence, will remain in position while ESA’s GomX-4B maneuvers up to 4500 km away.
“We have two pressurized fuel tanks linked to two pairs of thrusters,” explains Tor-Arne Grönland, head of NanoSpace. ”Rather than burning propellant, these are simpler ‘cold-gas’ thrusters designed specifically for such a small mission. And simpler means cheaper and smaller.”
“The fuel is stored under pressure, then released through a tiny rocket nozzle. Even though it’s cold gas, we achieve a substantial velocity change by using liquid butane that turns to gas as it exits. Storing it as a liquid allows us to pack as many butane molecules as possible inside the small available volume – its liquid form being some 1000 times denser than its gas.”
Each thruster will provide only 1 mN – the weight you would feel holding a feather in your hand – but enough to move the 8 kg satellite over time.
The propulsion system is provided by NanoSpace and based on their flight proven 3U cold gas based system scaled up to the 6U mission. The Figure 21 shows how the dual tanks take up 0.5U height of the platform. The system provides around 15 m/s ΔV capability delivered through 4 x 1 mN thrusters based on NanoSpace’s MEMS thruster technology allowing extremely accurate thrust control.
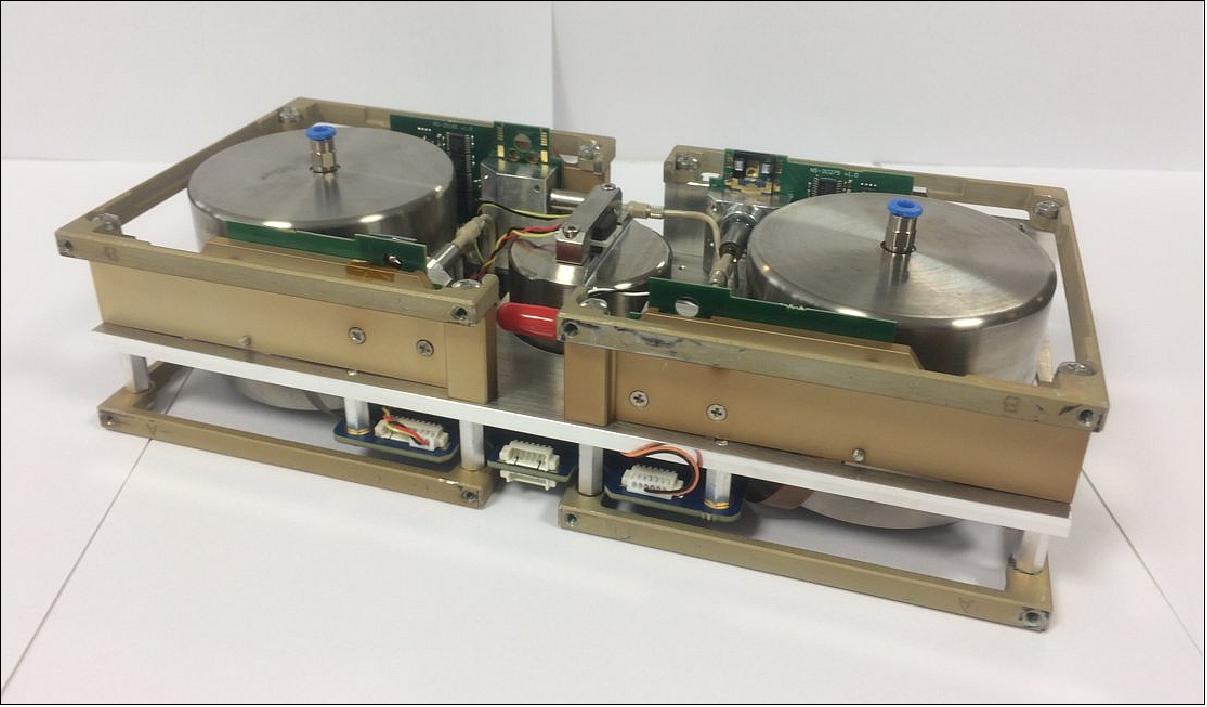
The thrusters will typically be fired in pairs although they can also work individually, for a few minutes at a time and up to an hour. “Compared to a typical half-ton satellite with 1 N hydrazine thrusters, we are almost a hundred times lighter and a thousand times weaker,” adds Tor-Arne.
NanoSpace already has flight experience behind its cold-gas thruster, with a smaller version carried on China’s TW-1 in 2015.
The company plans to demonstrate a great many different operating methods during the GomX-4B mission: “We’ll do different kinds of burns: long, short, pulsing and throttling up and down. It’s important to do these things early in the mission then again late on, to show it can survive and perform well in space.”
NanoSpace began as a commercial spin-off from Sweden’s University of Uppsala, and was acquired last year by Danish company GomSpace, builder of the GomX-4 satellites. The companies are currently working together on a constellation of more than 200 CubeSats for a commercial customer.
NanoSpace is also developing an ESA thruster for flying several satellites in formation, rendezvous and docking, and for controlling the orientation of CubeSats in deep space.
HyperScout
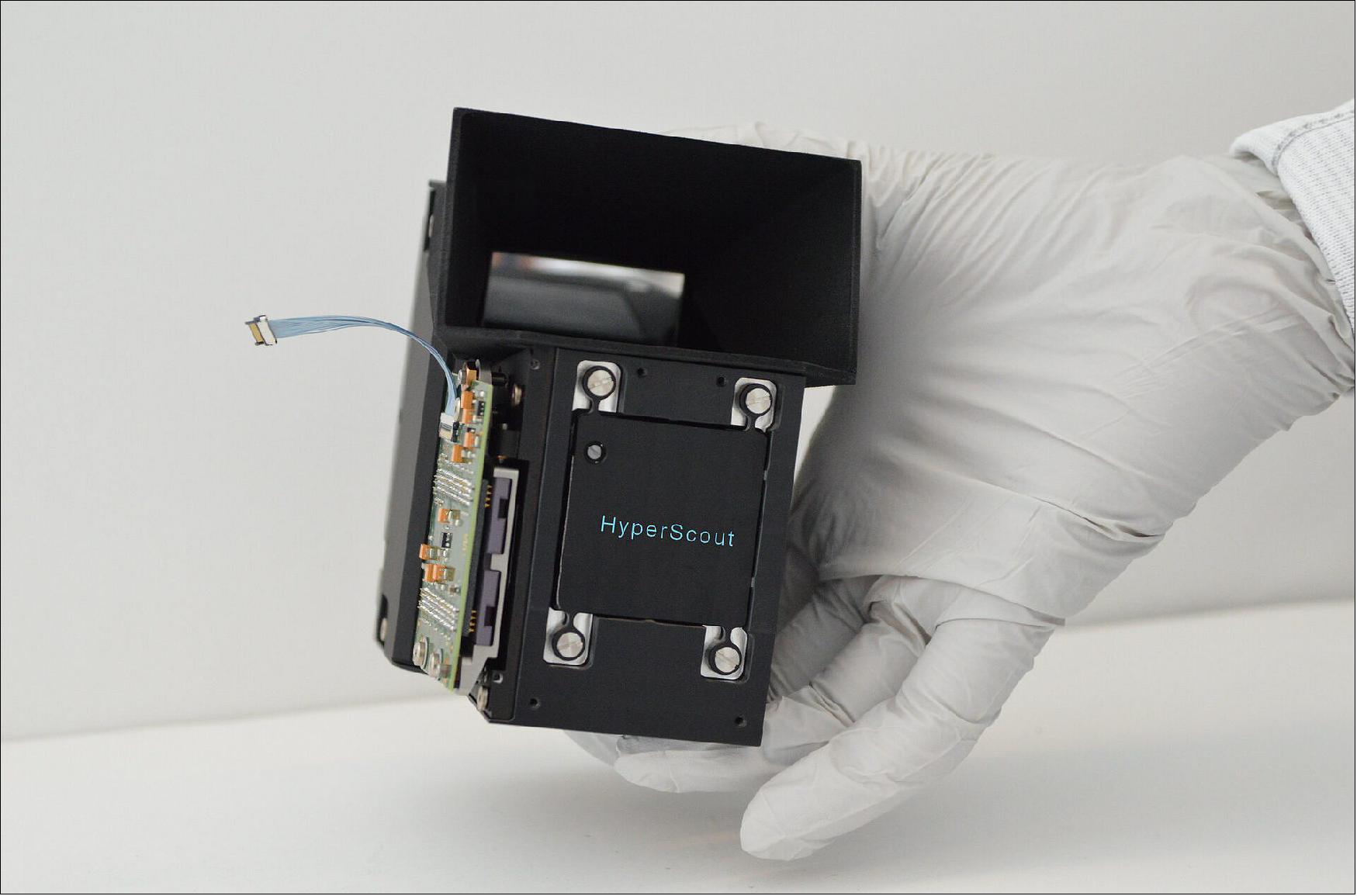
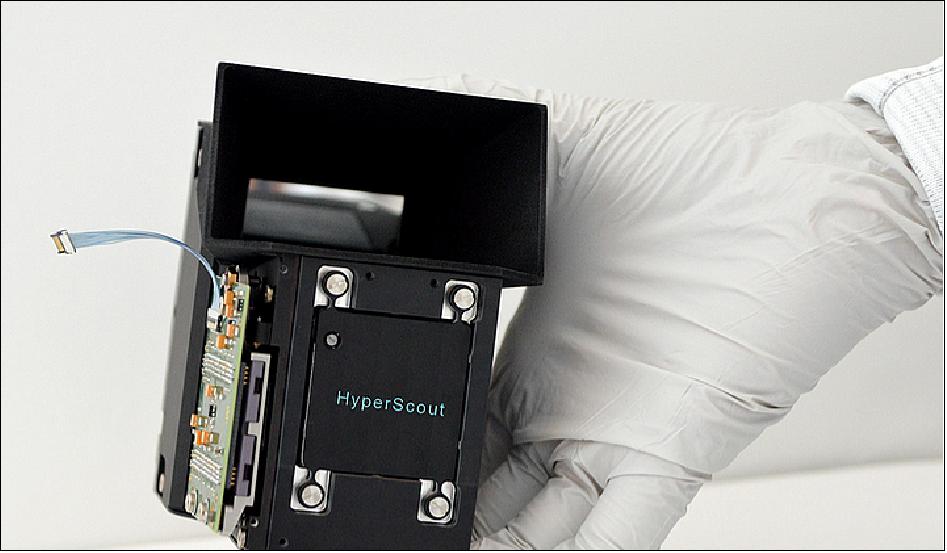
HyperScout, provided by COSINE Measurement Systems, Warmond, The Netherlands, is the first ever miniaturized hyperspectral imager with its own brain. It is designed to be operated upon nano-, micro- and larger satellites. The extremely compact reflective telescope ensures high optical quality in the VNIR range. The onboard data handling system is made for realtime data processing, enabling Level-2 generation onboard and therefore drastically reducing the amount of data to be downloaded and processed (Ref. 22). 29)
Due to rapid price drops and miniaturization of the instruments, HyperScout can be turned into a commercially exploitable platform bringing enterprise solutions by real-time earth inspection. HyperScout will enable countless companies and organizations to use real-time Earth observations in different applications for their insights and decisions.
If used onboard larger satellites, the wide swath, the Level-2 realtime data processing, and the minimal impact at system level, make the HyperScout attractive as an ancillary instrument providing real time phenomena information either to the larger primary payload, or to a ground control room. This enables smart operational planning for large payloads.
Mass, Volume Power | 1.1 kg, 1U volume compatible, 11 W |
Spectral range | 400-1000 nm |
Spectral bands | 45 |
Resolution | 4096 x 1850 pixels |
Swath width (@300 km altitude) | 164 km |
GSD (Ground Sample Distance) (@300 km altitude) | 40 m |
Onboard data processing | Level 2 |
Applications:
• Land survey and management, e.g. illegal dumps
• Early warning, e.g. flooding, forest fire, landslides
• Land cover and land use classification
• Monitoring of vegetation conditions (drought)
• Water logging
Color equals information, so the more spectral bands an Earth-observing satellite sees, the greater quantity of environmental findings returned to its homeworld. Now ESA is ready to fly a hand-sized hyperspectral imager – small enough to fit on its next nanosatellite. Hyperspectral instruments divide up the light they receive into many narrow, adjacent wavelengths to reveal spectral signatures of particular features, crops or materials, providing valuable data for fields such as mineralogy, agricultural forecasting and environmental monitoring. 30)
These cameras are typically bulky items of 100 kg or more, requiring costly full-sized satellites. But advanced electronics, new materials and optomechanical manufacturing techniques have opened up new possibilities for miniaturizing payloads, with lower but still acceptable performances in terms of radiometry and spatial/spectral resolutions, when comparing to their bigger cousins.
ESA worked with industrial partners for years to shrink the complex assemblage of precisely curved ‘three-mirror anastigmat’ mirrors needed to achieve a hyperspectral imager small enough to fit in the palm of a hand.
“Having got the payload working from an optical point of view, the next challenge we faced was the sheer quantity of data that hyperspectral imagers produce, potentially terabytes per orbit,” explains Alessandro Zuccaro Marchi of ESA’s Optics section. “Each line of each view is observed in many different wavelengths, building up into a complete image ‘cube’. The problem is that the available bandwidth downlink back to Earth faces fundamental limitations, set by the CubeSat’s small size, threatening onboard data bottlenecks.”
The answer was to make HyperScout as smart as possible, to perform as much image processing as possible onboard, to turn raw radiance measurements into corrected, georeferenced geophysical parameters. Such Level-2 results comprise less data, but contain much more useful information.
“In addition, HyperScout will be sufficiently intelligent that it will be able to perform automated comparisons of images of the same location taken in different moments, such as subsequent orbits,” adds Alessandro. “It can then flag any variations that might indicate important changes such as flooding, drought or fire hazards, going on to decide an alert needs to be sent to Earth. So only really important, actionable notifications will need to be returned.”
Gomx-4B’s main goal is to demonstrate intersatellite communication techniques and micropropulsion orbit control with near-twin GomX-4A, but time is being made available to make repeat acquisitions over areas of interest, in combination with airborne observational campaigns using another HyperScout.
HyperScout was developed by a consortium led by cosine Research in the Netherlands, who stressed the value of this early chance to demonstrate the technology in orbit for the technology’s commercial future.
“HyperScout is a unique combination of hardware and software,” comments Marco Esposito of cosine Research. “Bigger instruments can make more precise measurements of different components of ecosystems, but require years of development. “Mass produced, this compact instrument could instead be flown as a secondary payload on numerous different missions, potentially to be used as an early warning viewfinder – providing realtime alerts of changes on the ground to cue up larger instruments for detailed follow-up observations.”
The project was performed under ESA (European Space Agency) GSTP (General Support Technology Program) contract, by a consortium lead by cosine measurement systems B.V. (NL), including VDL (NL), TUDelft (NL), VITO NV (Belgium) and S&T AS (Norway).

Overview of instrument (Ref. 22):
HyperScout® is a miniaturized hyperspectral imager based on a three mirror anastigmat telescope (TMA) and onboard processing units. 31) The extremely compact reflective telescope ensures high optical quality over the entire range of optical wavelengths. The operational onboard data handling system is designed for realtime data processing, enabling Level -2 generation onboard and therefore drastically reducing the amount of data to be downloaded and processed on ground. This mission will benchmark the payload in flight performance and will demonstrate its functionalities.
The strength of HyperScout® lies in the compact design, low power consumption, low mass and onboard processing capabilities. HyperScout® is equipped with a 2D sensor and a spectral filtering element to separate the different wavelengths. The OBDH (On-Board Data Handling) system is able to process in realtime the acquired L0 data performing geometric corrections and orthorectification allowing the L2 data processing algorithms to analyze the data for a variety of applications. The same data can be processed for all the different identified applications, for example for vegetation conditions and change detection. The objective is to enable the direct download of the processed geophysical data products with coordinate information and to enable early warning. 32)
The telescope is an athermal system based on a monolithic structure. The FPA is based on CMOS sensor and a spectral filtering element used to separate the different wavelengths. The ICU (Instrument Control Unit) is the S/C contact point for the HyperScout® allowing in-flight debugging of the BEE/OBDH subsystem. It is possible to completely power down each subsystem from the ICU. The BEE is the electrical interface to the spacecraft and is latch-up protected. It distributes power, clocks, telemetry and commands between the units, controls the detector and serves as the data and control interface, providing clock timings, frame rate control, exposure and gain control. The OBDH then merges the data acquired with the platform ancillary information creating L0 data, which is then stored in the payload MMU (Mass Memory Unit).
The OBDH hardware serves multiple purposes, the most distinct being the platform for both the acquisition and the processing modes. During the acquisition mode, data will be transferred from the BEE into the memory of the OBDH, which is then written to the MMU via SATA. During processing mode (L0 to L2A-L2B), the data is retrieved from the MMU and processed in memory on the OBDH.
Both the acquired L0 image data and processed data are stored on board the payload's MMUs. Two MMUs are operated in a hot and cold redundant configuration. The specification of the payload during its in orbit demonstration mission is reported in Table 3.
IOD orbit | Sun Synchronous, 500 km altitude, LTDN 15:00 hrs |
FOV (Field of View) | 23º (ACT) x 16º (ALT) - nominal FOV 31º (ACT: Across Track) |
GSD (Ground Sampling Distance) | 70 m @ 500 km |
Swath IOD | 200 x 150 km (ACT x ALT) @ 500 km |
Spectral range | 400 - 1000 nm |
Spectral resolution | 15 nm |
Dynamic range | 12 bit |
SNR | 50-100 @ 500 km |
Instrument mass | 1.3 kg |
Legend to Table 3: The nominal FOV ACT (Across Track) of HyperScout is 31º. However, due to mechanical constraints for the current mission it was reduced to 23 º
HyperScout® acquisition strategy: The wavelength separation is performed in the along track direction, with a constant wavelength in the across track direction. The 2D sensor is used in pushbroom mode: the full hyperspectral datacube acquisition requires the acquisition of a series of subsequent frames, so that each region on ground is imaged in all wavelengths and can then be used to reconstruct the hyperspectral datacube. The acquisition sequence is depicted in Figure 26.
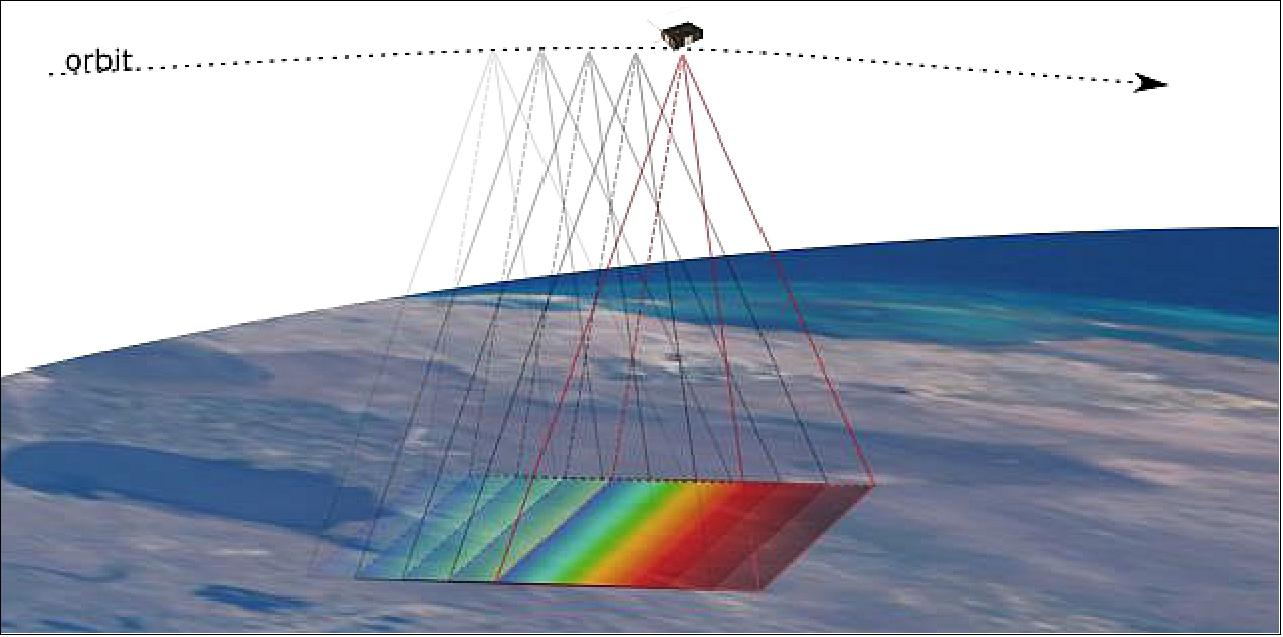
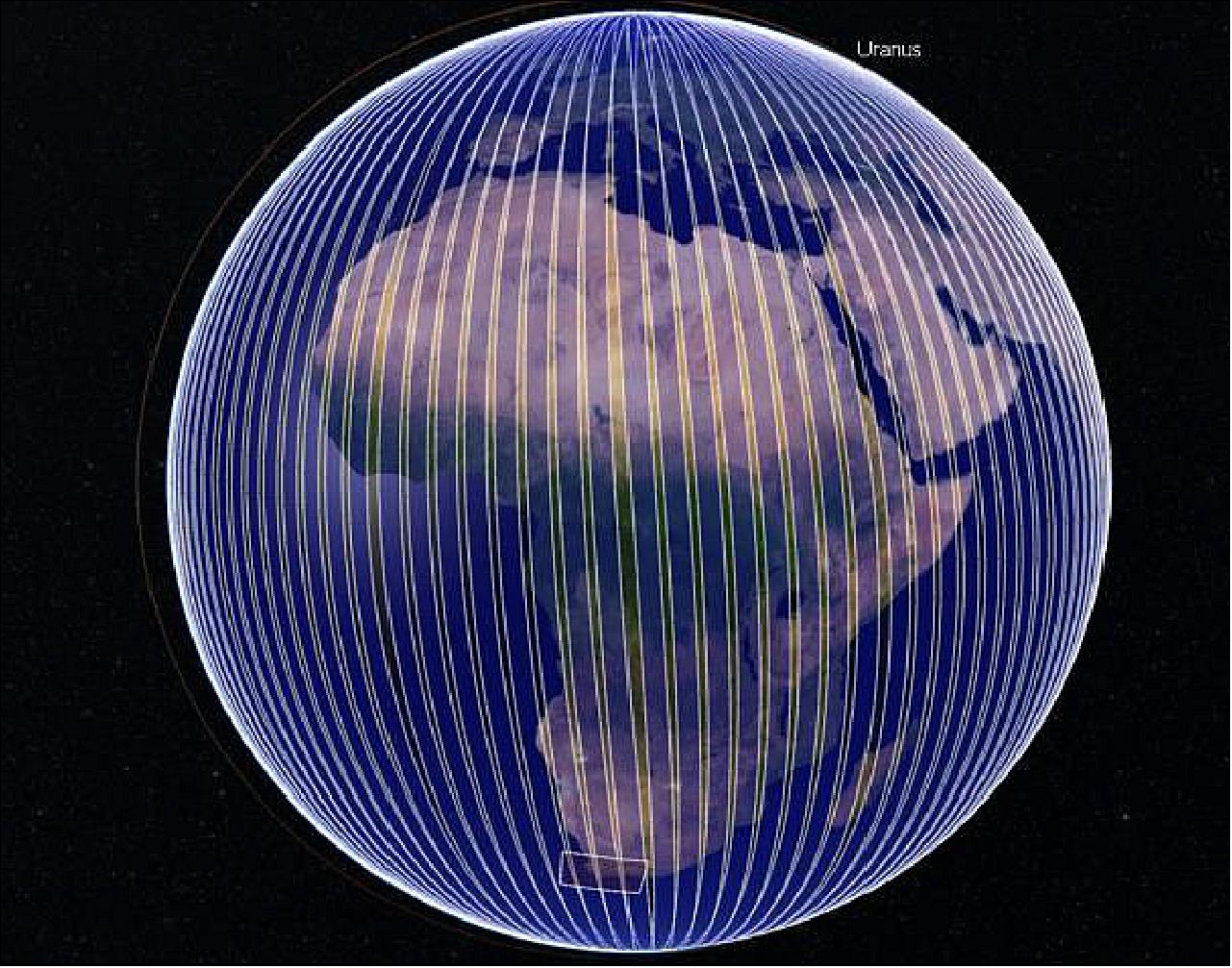
HyperScout IOD (In Orbit Demonstration) mission overview: At the orbital height of 500 km, HyperScout® will orbit the Earth 15 times a day, with a complete revisit at the equator around 45 days. The satellite will be configured once per day defining the key application for each site and the region of interest.
The HyperScout® operational phase is planned to be completed by the end of 2018. The mission operations are subdivided into blocks, to spread the operations over the nominal mission and monitor the performance of the payload after a long exposure to the space environment. This will also serve the purpose of acquiring data over the same regions of interest at different time intervals to observe seasonal variations.
The first operational block is dedicated to the radiometric calibration, line of sight model correction and instrument functionality testing. During the second operational block of intensive observations L2 data validation will be performed, and in the last block, on board processing experiments will take place.
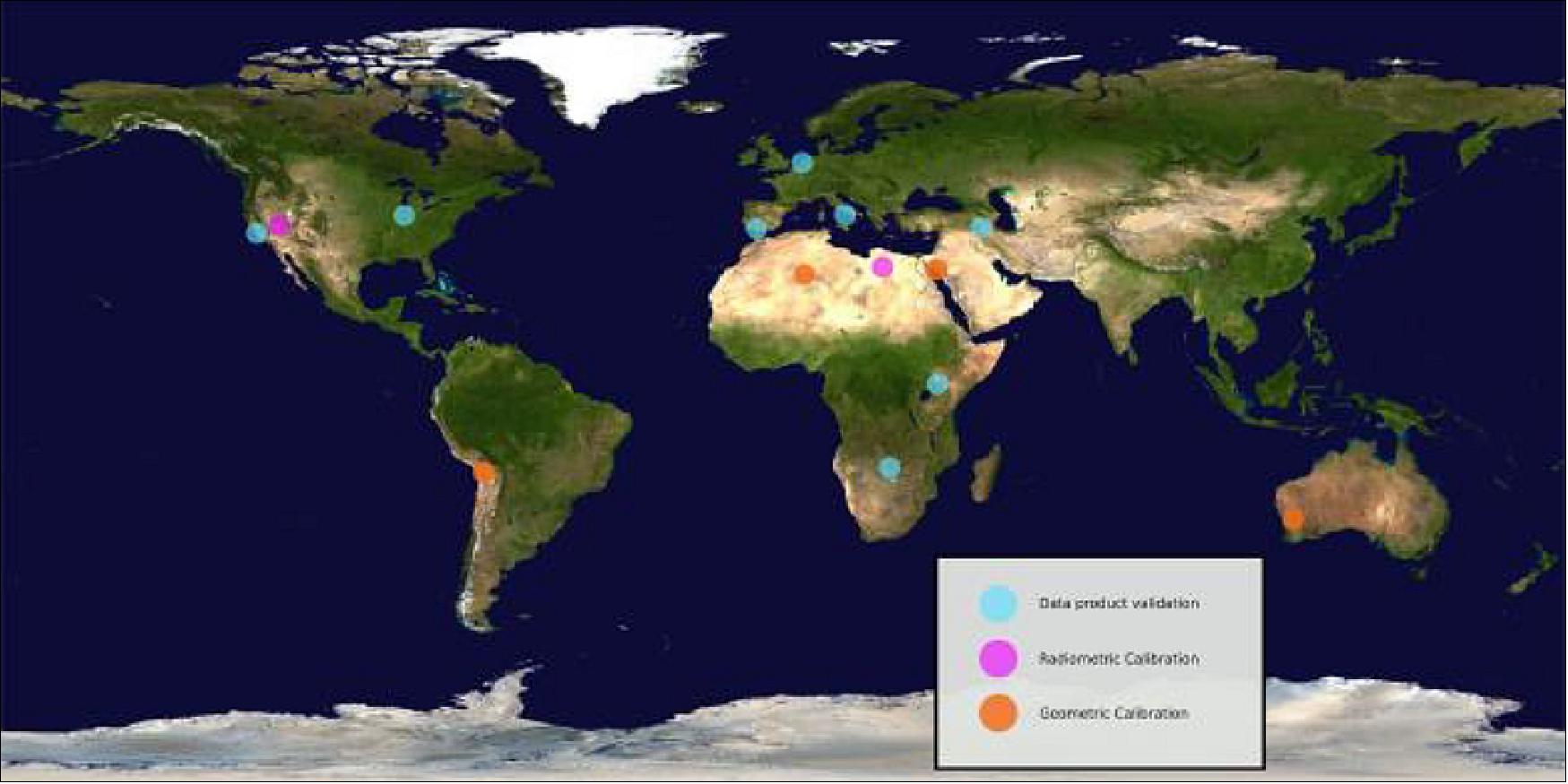
The IOD mission regions of interest have been identified by the consortium partners and are listed in Figure 5. The regions are both calibration and data product validation targets. During the intensive observation period the data will be compared with Copernicus data, in-situ ground truth measurements and an airborne campaign.
HyperScout applications: HyperScout® is a cost-constrained compact imager developed to serve a large variety of applications, among which monitoring of natural disasters such as floods delineation, forest fires hazard and desertification. High revisit times globally (sub-daily) can be achieved with the deployment of a constellation composed of tens of units.
Considering urban areas, materials such as concrete, asphalt, metal roofs, could be classified; in the field of vegetation, recent studies focused on compositional variation of different plant species to extract major vegetation gradients; in the case of wetlands, detection and monitoring of floods enables a more rapid response to flood risks and assessment of damaged areas. The same applies for fire hazard.
ADS-B (Automatic Dependent Surveillance)
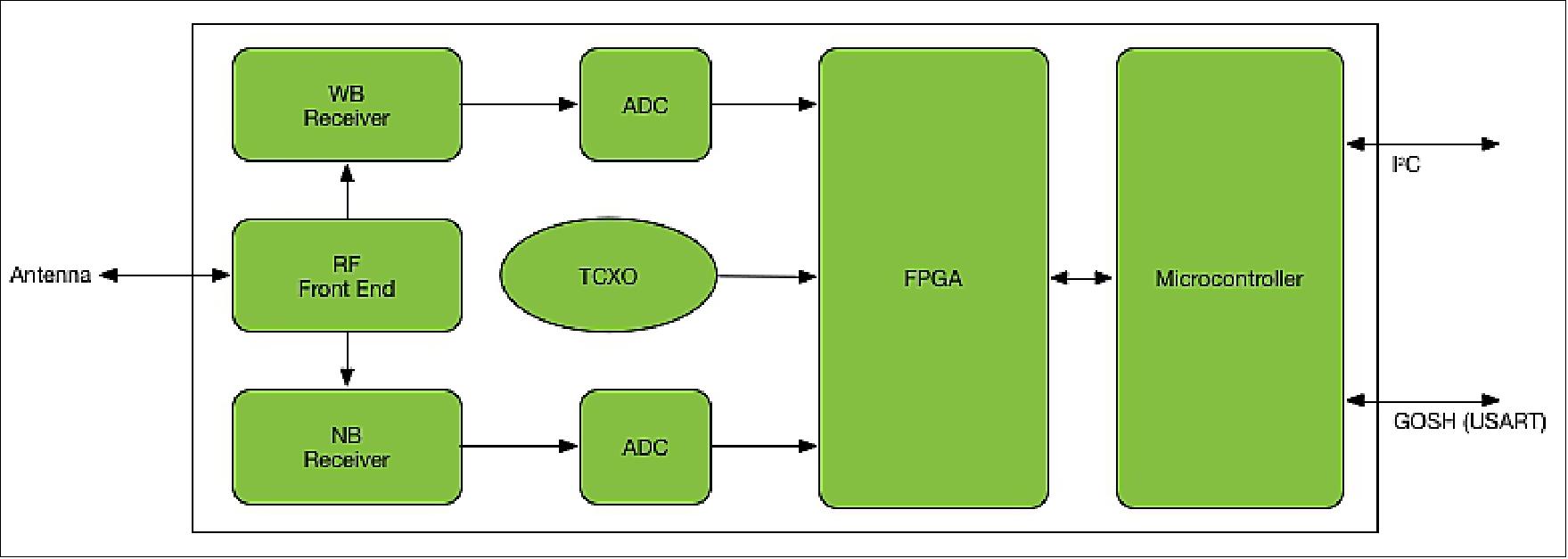
ADS-B is a cooperative surveillance technology in which an aircraft determines its position via satellite navigation and periodically broadcasts it, enabling it to be tracked. Usually it is ground stations and other airplanes receive the information, but when flying over large bodies of water, no receiver might be in the vicinity. 33)
Today, most civil passenger aircraft are equipped with ADS-B transponders operating at 1090 MHz and transmitting information about aircraft ID, position and status. On-board intelligent database allows recorded data to be queried and searched in many ways e.g. tracking specific flight IDs or providing regional overviews.
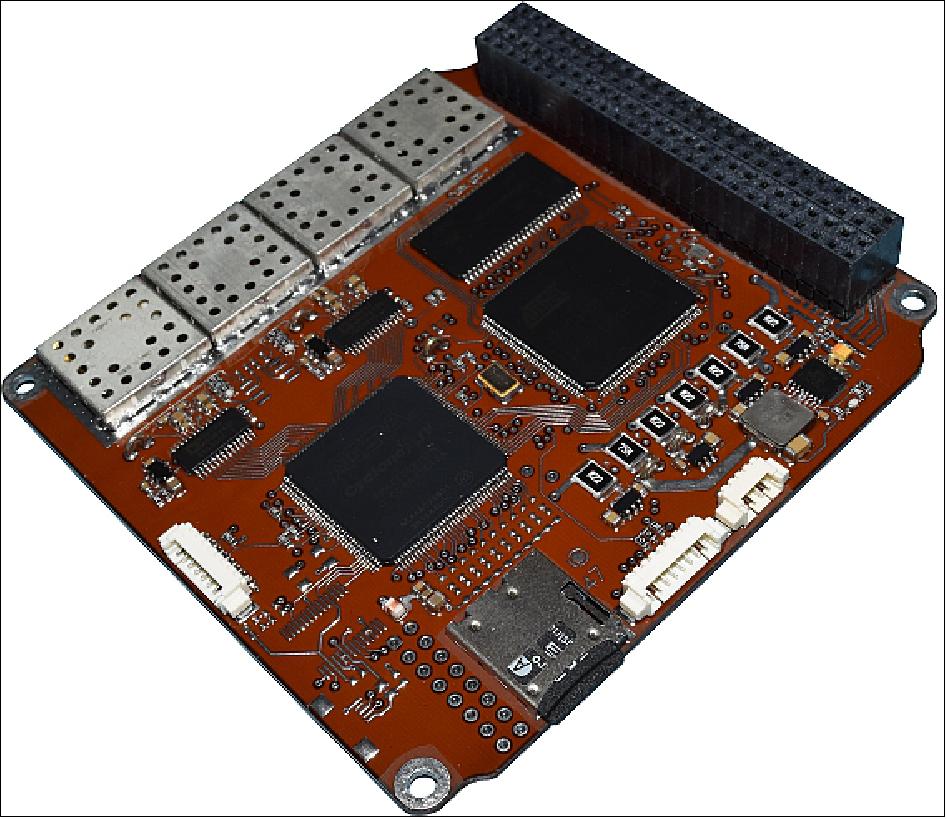
GomSpace refers to its ADS-B system as NanoCom. The system has been flight tested on GOMX-1, and performed as planned.
Main Features:
• Flight-proven ADS-B (Automatic Dependent Surveillance - Broadcast) receiver for aircraft tracking
• Consists of a reconfigurable FPGA CubeSat kit compatible board
• Fits in less than a 0.3U volume in a nanosatellite / cubesat and uses less than 1 W of power
• Reconfigurable FPGA (in flight)
• Max ADS-B packages per second: 800.
Highlighted Features:
• Sensitivity down to –103 dBm (NB) and -99 dBm (WB)
• CSP data interfaces over I2C-bus
• Low power consumption: ~500 mW
• Operational temperature: -40 °C to +60 °C
• Dimensions: 92.0 mm x 88.9 mm x 12.5 mm (without stack connector)
• UART console interface for easy use in lab setup
• SSMCX antenna connector
• Integrated EMI shield
• Fits standard PC104
• PCB material: Glass/Polyimide 4+4 twin stack ESA ECSS-Q-ST-70-11-C
• IPC-A-610 Class 3 assembly.
AIS (Automatic Identification System)
Ship Tracking with Space based AIS Receiver. The Satlab QubeAIS is a fully self-contained SDR based AIS (Automatic Identification System) receiver, which is suitable for LEO satellite missions. Weighing less than 55 g and using only 800 mW during full load. This versatile SDR offers excellent performance given the typical constraints of a CubeSat - or as an additional payload on larger satellites.
The Satlab QubeAIS has flown on several successful missions. Aalborg University have public data from their AAUSAT3 mission.
Main Features:
• AIS Receiver Board features:
- Easy to configure stand-alone AIS receiver
- Monitors both AIS channels simultaneously
- Possible to download raw IF spectrum samples
- Low Power
• RF Features:
- -113 dBm sensitivity
- LNA and SAW filters onboard
- Multiple connector and placement options
• Interfaces:
- Delivered with SW library for easy integration
- CSP (CubeSat Space Protocol)
- UART and CAN
• Mechanical Features:
- PC/104 form factor
- MCX or SMA antenna connector.

The Satlab QubeAIS is a fully self-contained SDR based AIS receiver, suitable for LEO satellite missions. Using less than 1 W during full load, this versatile SDR offers excellent performance given the typical constraints of a CubeSat - or as secondary payload on larger satellites. The receiver is software configurable for simultaneous reception of either AIS channels 1 & 2 (162 MHz) or the long-range channels 3 & 4 (156.8 MHz).
The trade-off between a reconfigurable hardware down-converter and a DSP based SDR algorithm, enables a large amount of processing power at a minimal power consumption. The demodulation algorithm uses per-packet adaptive filtering and center frequency estimation, which ensures good reception even at >3000 km line-of-sight and at a large Doppler frequency offset.
Support for the CSP (Cubesat Space Protocol) on CAN-bus or UART, eases integration and reduces the buy-to-fly-time significantly.

Chimera Experiment
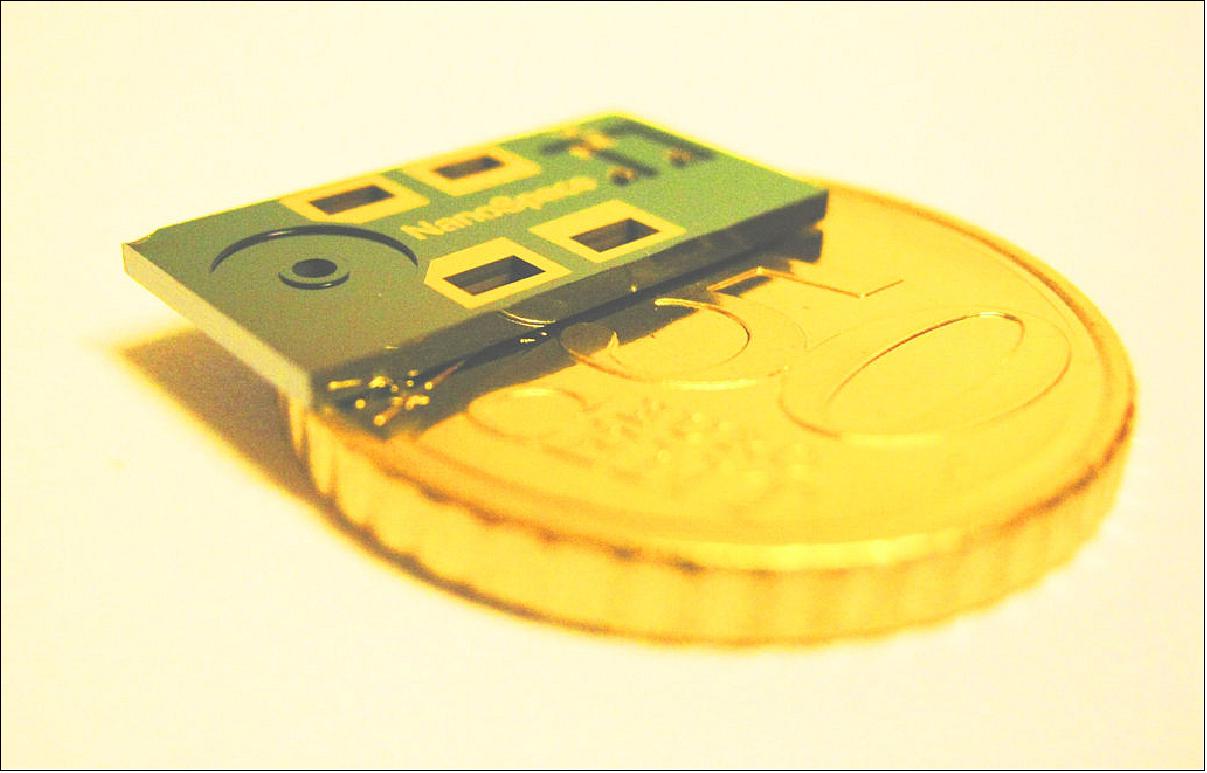
ESA’s GomX-4B CubeSat is carrying this small, cheap but important secondary experiment (Figure 34): a single 10 x10 cm electronics board with 12 separate computer flash memories, made up of three examples of four different types, each purchased for a few euros. Known as Chimera (CubeSat Highly Integrated Memory Radiation Assurance) – this experiment will test how such ‘commercial-off-the-shelf’ (COTS) parts cope with bombardments of high-energy electrically charged atomic particles from the Sun and deep space. A specially space-qualified monitoring chip, seen in gold, will record the performance of the dozen memories. 35) 36)

References
1) ”GomX-4B with GomX-4A,” ESA, Oct. 13, 2016, URL: http://m.esa.int/spaceinimages/Images/2016/10/GomX-4B_with_GomX-4A
2) ”Arctic Surveillance and the Building Blocks of Constellations,” GomSpace, URL: https://gomspace.com/gomx-4.aspx
3) ”GomSpace completes acquisition of NanoSpace AB,” GomSpace Press Release, Ocober 16, 2016, URL: https://gomspace.com/news/gomspace-completes-acquisition-of-nanospace-a.aspx
4) Laura León Pérez, Per Koch, Roger Walker, ”GOMX-4 – the twin European mission for IOD purposes,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-VII-07, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4108&context=smallsat
5) Lars K. Alminde, Morten Bisgaard, Igor A. Portillo, Daniel Smith, Laura Leon Perez, Tor-Arne Grönland, ”GOMX-4: Demonstrating the Building Blocks of Constellations,” Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 5-10, 2017, paper: SSC17-III-04, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3612&context=smallsat
6) https://gomspace.com/home.aspx
7) David Gerhardt, Morten Bisgaard, Lars Alminde, Roger Walker, Miguel Angel Fernandez, Anis Latiri, Jean-Luc Issler, ”GOMX-3: Mission Results from the Inaugural ESA In-Orbit Demonstration CubeSat,” Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-III-04, URL: http://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=3347&context=smallsat
8) ”GomSpace and ESA sign contract to initiate work on new GOMX mission,” GOMSpace news, 20 December 2018, URL: https://gomspace.com/news/gomspace-and-esa-sign-contract-to-initiate-wo.aspx
9) ”GomSpace completes acquisition of NanoSpace AB,” GomSpace, October 16, 2016, URL: https://gomspace.com/news/gomspace-completes-acquisition-of-nanospace-a.aspx
10) Rui C. Barbosa, ”Long March 2D launches Zhangheng-1 Earthquake investigator,” NASA Spaceflight.com, 2 Feb. 2018, URL: https://www.nasaspaceflight.com
/2018/02/long-march-2d-zhangheng-1-earthquake-investigator/
11) ”GomSpace’s fourth Demonstration Mission is Successfully Launched – intended to Pioneer the Advanced,” GomSapce, 2 February, 2018, URL: https://gomspace.com
/news/gomspaces-fourth-demonstration-mission-is-suc.aspx
12) ”The size of a cereal box: ESA’s first satellite of 2018,” ESA, 2 Feb. 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology
/The_size_of_a_cereal_box_ESA_s_first_satellite_of_2018
13) ”ESA’s latest technology CubeSat cleared for launch site,” ESA, 23 Nov. 2017, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology
/ESA_s_latest_technology_CubeSat_cleared_for_launch_site
14) ”Blockchain Transaction Tested By GomSpace + J.P. Morgan Via The GOMX-4 Smallsat Constellation,” Satnews, 26 February 2021, URL: https://news.satnews.com/2021/02/26/
blockchain-transaction-tested-by-gomspace-j-p-morgan-via-the-gomx-4-smallsat-constellation/
15) ”Milk-carton-sized HyperScout making hyperspectral Earth views,” ESA Enabling & Support, 20 May 2020, URL: http://www.esa.int/Enabling_Support/Space_Engineering_Technology
/Milk-carton-sized_HyperScout_making_hyperspectral_Earth_views
16) ”Narrow-Band IoT Successfully Tested by OQ Technology Using a Smallsat,” Satnews Daily, 17 October 2019, URL: http://www.satnews.com/story.php?number=2029355696#
17) ”2Operate and GomSpace to boost constellation management with AI,” Space Daily, 5 March 2019, URL: http://www.spacedaily.com/reports/
2Operate_and_GomSpace_to_boost_constellation_management_with_artificial_intelligence_999.html
18) ”2Operate and GomSpace to boost constellation management with artificial intelligence,” GomSpace, 4 March 2019, URL: https://gomspace.com/news/2operate-and-gomspace-to-boost-constellation-.aspx
19) ”Mission accomplished for ESA’s GomX-4B butane-propelled CubeSat,” ESA, 24 December 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology/
Mission_accomplished_for_ESA_s_GomX-4B_butane-propelled_CubeSat
20) ”HyperScout demonstrates that satellite imagery can be processed in space,” cosine measurement systems, 18 December 2018, URL: https://www.cosine.nl/
hyperscout-demonstrates-that-satellite-imagery-can-be-processed-in-space/
21) Rasmus Holst, Jens Nielsen, David Gerhardt, Jose Angel Gutierrez Ahumada, ”Attitude and Orbit Control Results of the GOMX-4 Tandem CubeSat Mission,” Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18-B4.6B.11, URL: https://iafastro.directory/iac/proceedings/IAC-18/IAC-18/B4/6B/manuscripts/IAC-18,B4,6B,11,x48211.pdf
22) M. Esposito, S.S. Conticello, N. Vercruyssen, C. N. van Dijk, P. Foglia Manzillo, C. J. Koeleman, B. Delauré, I. Benhadj, J. Blommaert, S. Livens, A. Jochemsen, M. Soukup, M. Menenti, B. Grote, E. Hosseini Aria, ”Demonstration in space of a smart hyperspectral imager for nanosatellites,” Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-I-07, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4069&context=smallsat
23) ”ESA’s GomX-4B CubeSat relaying data across space from Danish twin,” ESA, 18 April 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology/
ESA_s_GomX-4B_CubeSat_relaying_data_across_space_from_Danish_twin
24) First light from HyperScout imager,” ESA, 18 April 2018, URL: http://m.esa.int/spaceinimages/Images/2018/04/First_light_from_HyperScout_imager
25) ”Linked CubeSats,” ESA, 15 April 2018, URL: http://m.esa.int/spaceinimages/Images/2018/04/Linked_CubeSats
26) Morten Garly Andersen, ”Unique Danish satellite in orbit around the Arctic,” DTU Space, 5 Feb. 2018, URL: http://www.dtu.dk/english/news/Nyhed?id=b6b1e469-9c27-44bf-80a5-08ac9c9e8382
27) ”UPDATE: Post-Launch Comms Success for Just Launched GOMX-4 Satellites,” Satnews Daily, Feb. 5, 2018, URL: http://www.satnews.com/story.php?number=2043797726#
28) ”ESA’s next satellite propelled by butane,” ESA, 21 December 2017, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology/ESA_s_next_satellite_propelled_by_butane
29) ”COSINE HyperScout,” URL: http://hyperscout.nl/
30) ”Hand-sized hyperspectral camera to fly on ESA’s next CubeSat,” ESA, 8 Jan. 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology
/Hand-sized_hyperspectral_camera_to_fly_on_ESA_s_next_CubeSat
31) Simon Silvio Conticello, Marco Esposito, Pierluigi Foglia Manzillo, Chris Van Dijk, Nathan Vercruyssen, Pieter-Jan Baeck, Iskander Benhadj, Stefan Livens, Bavo Delaure’, Michael Soukup, Arnoud Jochemsen, Christina Aas, Ben Gorte, Enayat Hosseini Aria, Massimo Menenti, ”Hyperspectral imaging for real time land and vegetation inspection,” Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Valletta, Malta, 30 May – 3 June 2016
32) Michael Soukup, Janis Gailis, Daniele Fantin, Arnoud Jochemsen, Christina Aas, Pieter-Jan Baeck, Iskander Benhadj, Stefan Livens, Bavo Delauré, Massimo Menenti, Ben Gorte, Seyed Enayat Hosseini Aria, Marco Esposito, Chris van Dijk, ”HyperScout: Onboard processing of hyperspectral imaging data on a nanosatellite,” Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Valletta, Malta, 30 May – 3 June 2016
33) ”Datasheet: An ADS-B receiver for space applications,” GomSpace, 22 Sept. 2015, URL: https://studylib.net/doc/18526376/nanocom-ads-b-datasheet
34) ”Software-Defined AIS Receiver for CubeSats,” QubeAIS datasheet revision 1.4, URL: https://gomspace.com/UserFiles/Subsystems/datasheet/SLDS-AIS-14.pdf
35) ”Putting everyday computer parts to space radiation test,” ESA, 29 Jan. 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_Technology
/Putting_everyday_computer_parts_to_space_radiation_test
36) ”Chimera experiment,” ESA, 29 Jan. 2018, URL: http://m.esa.int/spaceinimages/Images/2018/01/Chimera_experiment
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top