HummerSat-1 / FN-1 (Fengniao-1A/B)
EO
Multi-purpose imagery (ocean)
Multi-purpose imagery (land)
Other
Quick facts
Overview
| Mission type | EO |
| Agency | CAST |
| Mission status | Operational (nominal) |
| Launch date | 18 Nov 2012 |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Lightning Detection |
| Instruments | APS, GPS receiver |
| Instrument type | Other, Communications, Data collection, Lightning sensors |
| CEOS EO Handbook | See HummerSat-1 / FN-1 (Fengniao-1A/B) summary |
HummerSat-1 / FN-1 (Fengniao-1A/B)
HummerSat-1, a project formerly referred to as MS-1 (Minisatellite-1), represents the first realization of a new generic micro/minisatellite development of DFHSat (DFH Satellite Co. Ltd.), the development/manufacturing/operating unit of CAST (Chinese Academy of Space Technology) in Beijing, China. DFHSat is a division of CAST with the mandate and responsibility of small satellite technology introduction for a variety of applications (remote sensing, science/exploration missions, communications).
Mission Concept
The overall objective of the HummerSat-1 mission is to provide a technology demonstration as well as to test observation capabilities within the spacecraft class of 80-250 kg of total mass envelop (micro/minisatellite), for a number of different missions and applications, including support scenarios of constellations and formation flight (with intersatellite crosslink, relative navigation, guidance and control). 1) 2)
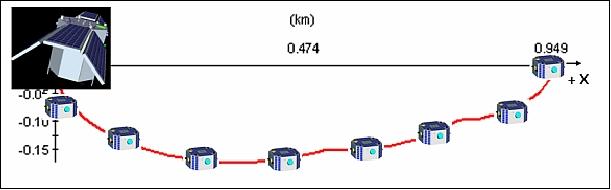
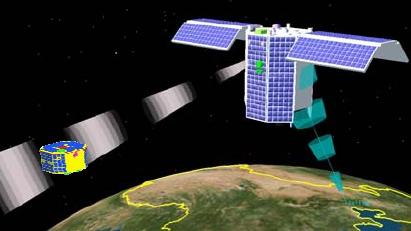
The HummerSat-1 mission concept considers a minisatellite, called HummerSat-1 with a launch mass of about 160 kg, as the principal spacecraft of the formation. In addition to the minisatellite HummerSat-1, there is a microsatellite, called HummerSat-1A with a mass of ~ 30 kg. HummerSat-1A is planned to be an integral part of HummerSat-1 at launch - it will be deployed in orbit to form a two-spacecraft formation with the mother spacecraft. Both spacecraft are in contact with a crosslink for information exchange and the enactment of required orbit maneuvers. However, all ground communications with the formation is only via the mother spacecraft.
The goal of the HummerSat-1 mission is to:
• Demonstrate the newly developed CAST-mini bus and CAST-micro bus designs in space, in particular to validate their functional capabilities and technologies introduced
• Demonstrate the capability of close formation flying technologies such as: relative navigation, guidance and control, intersatellite crosslink, and command.

HummerSat-1 and HummerSat-1A were launched as secondary payloads on Nov. 18, 2012 on a CZ-2C vehicle. The launch site was TSLC (Taiyuan Satellite Launch Center), located in the northwest part of the Shanxi Province, China. The primary payload on this flight was HJ-1C (HuanJing-1C) of CNSA. 3)
During the launch phase, HummerSat-1A is fixed onto the +Z panel of Hummersat-1.
The secondary payloads on this flight were:
• NewTech-1 (New Technology Demonstration Satellite-1) of CASC
• HummerSat-1 (a minisatellite of 160 kg) of CAST (Chinese Academy of Space Technology)
• HummerSat-1A (a microsatellite of 30 kg) of CAST
Orbit: Sun-synchronous circular dawn-dusk orbit, altitude = 500 km, inclination = 97.3º, period = 94 minutes, LTDN (Local Time of Descending Node) at 6:00 hours.
HummerSat-1 Spacecraft
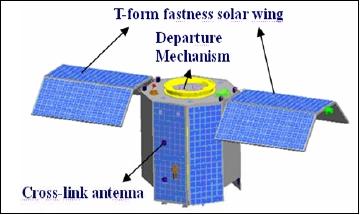
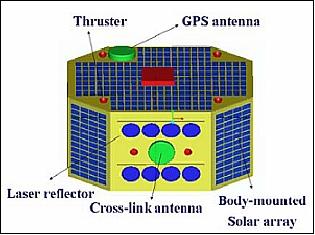
The first minisatellite, HummerSat-1 with an on-orbit mass budget of ~130 kg (after the microsatellite deployment), uses a new modular bus concept, referred to as CAST-mini, which is of CAST-968 and CAST-2000 platform heritage. The CAST-mini bus consists of a cylindrical (octagonal) body with face-mounted solar panels and two deployable T-form solar wings, oriented in the ±Y axis. The HummerSat-1 spacecraft body has a size of 785 mm in diameter and 1032 mm in height. Thermal control is provided by passive means (radiator) and assisted by active means (heater) when needed. A design life of 3 years is required.
The minisatellite is 3-axis stabilized with an Earth-pointing orientation, providing medium pointing and pointing-stability accuracies. The requirements call for:
- Attitude pointing accuracy of < 0.3º (3σ)
- Attitude determination accuracy of < 0.1º (3σ)
- Attitude pointing stability of ≤ 0.05º (3σ)
The AOCS (Attitude and Orbit Control Subsystem) is using linear magnetic controllers for momentum bias control to achieve 3-axis stabilization. Attitude is measured by a group of 3 single-axis FOG (Fiber Optic Gyros), a DSS (Digital Sun Sensor), a MM (Magnetometer), an ASS (APS Star Sensor), and MSS (Mini Star Sensor. A GPS receiver is being used for onboard time tagging and for orbit determination. - Actuation is provided by MWs (Momentum Wheels, 4 Nms), 3 MTs (Magnetorquers, 15 Am2), and a propulsion unit for orbit control consisting of 8 hydrazine thrusters (each 1 N). The MWs provide the bias with a pitch axis dipole moment while the MTs are used for roll/yaw control in the x-y axis and for the unloading of the MWs.
The onboard network consists of two parts, namely the information network and the power network (Figure 6). A dual-redundant CAN (Controller Area Network) bus supports the distributed data handling and control function network with medium rate data exchange (1 Mbit/s max). An in-house application protocol is being used on top of the standard physical and data-link layer interfaces.
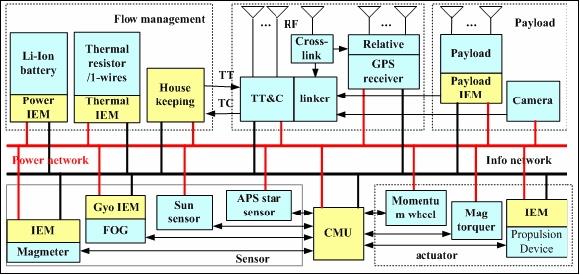
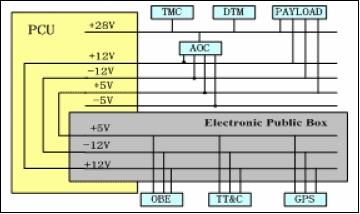
The EPS (Electric Power Subsystem) provides an average power of 90 W (peak power of 160 W). The solar arrays use GaAs cells. The Li-ion battery has a capacity of 10Ah for operations support in the eclipse phase of the orbit. A PCU (Power Conditioning Unit) provides power conditioning and distribution on the power network (Figures 6 and 7).
EPB (Electronic Public Box)
The EPB represents the central hub for all circuit boards and connectors of the various subsystems.

Onboard Controller
Hummersat-1 has an advanced controller, referred to as MEU (Management Executive Unit), that is capable of autonomously planning, executing and calibrating satellite orbit maneuvers. The controller achieves real-time navigation data from the onboard Global Positioning System (GPS) and the predictions of where the satellites are going to be. It also provides the necessary attitude pointing, and actual onboard commanding of the thrusters.

MPU (Main Processing Unit) | ARM9 / ARM11 |
PROM (Programmable Read¿Only Memory) | 64 kByte |
EEPROM (Electrically Erasable Programmable Read¿Only Memory) | 1 MByte |
SRAM (Static Random Access Memory) | 2 MByte |
Interrupt | 8 |
Bus interface | CAN (Controller Area Network), 2 channels |
RF Communications
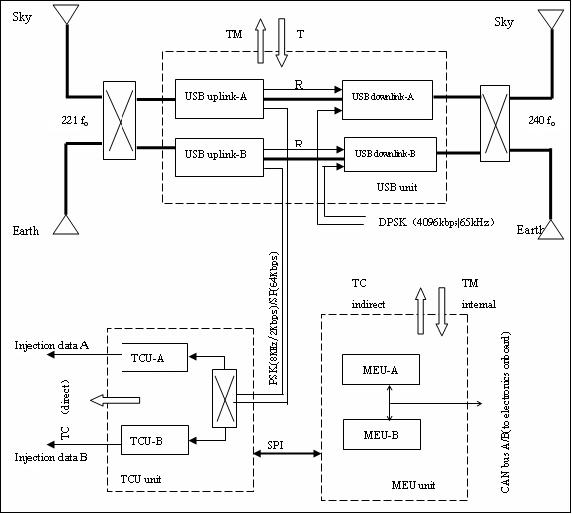
An onboard data storage capacity of 2 Gbit is provided. All communications with the ground segment are in S-band, also referred to as USB (Unified S-band). The TT&C (Telemetry Tracking & Command) data rates are between 2-64 kbit/s. The payload downlink, also referred to as DTM (Data Transmission), has a data rate of 2 Mbit/s.
The TT&C subsystem is composed of the USB units (uplink and downlink) and the TCU/MEU (Telecommand Unit/Management Executive Unit) devices. The uplink USB unit is in hot backup (dual-redundant), the downlink USB is dual-redundant but configured as a cold backup (avoidance of communication blockage).

Item/parameter | Description |
Support of mission types | Earth observation, technology demonstrations, space science, communications |
Mass budget (HummerSat-1) | Platform: 93 kg, payload: 66.5 kg (including HummerSat-1A) |
Orbit | SSO (Sun-synchronous Orbit), altitude range of 500-800 km |
Thermal subsystem | Passive radiator, Active heater; temperature range: -10ºC ~ + 45ºC |
S/C bus size | 785 mm in diameter and 1032 mm in height |
AOCS | Three-axis stabilization (Earth pointing configuration) |
RF communications | USB (Unified S-band), CCSDS protocol, packetized data transmission |
EPS (Electric Power Subsystem) | Available long-term power: 90 W |
Spacecraft design life | 3 years |
Sensor/Experiment Complement
Camera
The objective is to provide high-resolution snapshot imagery of target regions of interest. The camera has a mass of 36.5 kg and an average power consumption of 30 W.
HummerSat-1A Spacecraft
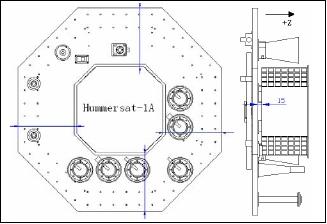
HummerSat-1A is a new microsatellite development of DFHSat (Figure 12). The objectives are to test the new modular platform capabilities in space and to use the spacecraft for formation flying demonstrations with HummerSat-1. The HummerSat-1A bus features also an octagonal shape (as the mother spacecraft) with dimensions of 400 mm in diameter and 175 mm in height. The surface-mounted solar cells (GaAs) provide an average power of ~ 5 W. Orbit and attitude control is provided with RCS (Reaction Control Subsystem) using 12 thrusters (each with 30 mN).
Spacecraft mass | 30 kg (25 kg of platform, 5 kg of payload) |
Spacecraft size | 400 mm diameter, 175 mm in height |
Spacecraft power | - Available long-term power: 4 W |
Thermal subsystem | Passive radiator, range: -10 ~+45ºC |
ADCS (Attitude Determination and Control Subsystem) | - Three-axis stabilization (Earth pointing) |
Crosslink | - S-band |
Mission design life | 3 years |
The payload consists of a CMOS camera with a total mass of 5 kg.
Relative Measurement and Navigation
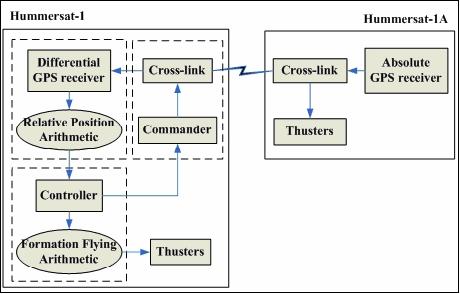
Relative orbit measurements between HummerSat-1 and -1A are provided with a differential GPS (DGPS) receiver. The navigation algorithms are embedded in the GPS receiver which cooperate with crosslink communication devices. The GPS data of HummerSat-1A is being cross-linked to HummerSat-1 at a rate of > 100 kbit/s.
In parallel, the formation control algorithms are part of the controller in the EPB. In fact, the entire formation flying guidance, navigation, control subsystem and GPS receiver is part of the EPB (Electronic Public Box) of the main platform.
Position accuracy | ≤ 20 m |
Velocity accuracy | ≤ 0.3 m/s |
Time accuracy | ≤1 µs |
Relative position | ≤ 0.1 m |
Relative velocity | ≤ 0.05 m/s |
Attitude accuracy | ≤ 0.1º/s |

The crosslink transceiver and TT&C unit are stowed in a box, referred to as S-band RF device. The device is characterized by low power consumption, small volume, light weight, high performance and flexible working mode. The S-band RF device of HummerSat-1 is composed of TC, TM, USB uplink, USB downlink, TCU/MEU and crosslink units.
Technology Introduction
IMES (Integrated Micro-Electronics System)
The technology package IMES is being developed for the HummerSat-1 mission, representing a comprehensive on-board automatic system, which manipulates the satellite operations, performs attitude control, and implements autonomous management as well as information transmission. IMES supports two basic service functions: the first is the on-board network control (OBNC) function, the second is the embedded management executive unit (MEU) function, using the dual-redundant CAN bus as an on-board field bus to meet the requirements for attitude control, distributed data handling, procedure control and autonomous management. IMES communicates with the ground via the S-band RF system. 4)
The IMES architecture is based on a highly reliable, low cost and low power topology. The architecture is designed to support operations of a multi-MEU system operating in the OBNC environment. In these functions, IMES represents the following technology:
1) Adaptation of multilevel control. The house-keeping unit is a rule-based system to supervise the control level to accomplish the satellite correspondence management. The IEM (Integrated Electronics Module) is a rule-based system for the process control level, which performs its own action control. The IMES performs centralized management services and distributed control services.
2) An embedded topology is implemented: The MEU design embeds all components thereby enhancing the capability/performance of each subsystem with programmable services and intelligent interfaces.
3) Implementation of field network technology: The on-board network adopts the dual-redundant CAN bus as its on-board field bus to meet the requirement for attitude control, distributed data handling, procedure control and autonomous management.
4) Implementation of hardware and software encapsulation technology: During the development phase of IMES, each component is encapsulated into a single module, where the interface of each module is capable to display the characteristics of the interior. The IMES consists of MEU and OBNC, both of which use the encapsulation technology. Hence, a full translucent interface is provided with this module.
5) The on-board software is based on RTOS (Real-Time Operating System), implemented in assembly language, almost all other code is written in ANSI C.

MEU (Management Executive Unit)
The MEU represents the basis of the automatic satellite system, which forms the general standard interface. Because of its small size and versatility, the MEU can be easily embedded into any spacecraft peripheral to allow that peripheral a common interface (CAN) to the remainder of the spacecraft.
The MEU design provides the following five main features:
• A plug-and-play function to interface easily multiple devices
• Special and general software: RTOS as a low level function and RTOS is a standardized function my be implemented. At the peripheral, there is only the need to develop special tasks to be added to the software system.
• The MEU represents a high-performance system with a microprocessor, memory device and lots of GPIO (General Purpose Input Output) for data processing, controlling and storage.
• Low cost: The standardized design of the MEU minimizes development and integration time.
• Low power: Typical power consumption of a MEU is in the order of 0.25 W.
References
1) X. Zhang, B. Xie, S. Dai, W. Zhang, G. Hu, D. Lan, “First Micro-Satellite and new enhanced satellite series in DFH Satellite Co. Ltd.;” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.6.13; also published in Acta Astronautica, Vol. 61, Issues 1-6, Aug. 2007, pp. 234-242
2) B. Xie, Y. Luo, X. Zhang, D. Lan, S. Dai, W. Zhang, “HummerSat-1: A new Space Mission with Microsatellite and Nanosatellite for Twin-Satellite Formation Flying Test,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.6.14
3) Rui C. Barbosa, “Chinese Long March 2C lofts Huanjing-1C into orbit,” NASA, Nov. 18, 2012, URL: http://www.nasaspaceflight.com/2012/11/chinese-long-march-2c-huanjing-1c-into-orbit/
4) Xiaotong Li, Sihan Shi, “Integrated Micro-Electronics System on CAST-mini Bus,” 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B4.7.04
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).