HY-1B (Haiyang-1B) / Ocean-1B
EO
Ocean colour instruments
Ocean
Ocean colour/biology
Quick facts
Overview
| Mission type | EO |
| Agency | CAST, NSOAS |
| Mission status | Mission complete |
| Launch date | 11 Apr 2007 |
| End of life date | 11 Apr 2011 |
| Measurement domain | Ocean, Land, Snow & Ice |
| Measurement category | Ocean colour/biology, Multi-purpose imagery (land), Albedo and reflectance, Surface temperature (ocean), Sea ice cover, edge and thickness |
| Measurement detailed | Land surface imagery, Earth surface albedo, Sea surface temperature, Ocean suspended sediment concentration, Sea-ice cover |
| Instruments | COCTS, CZI |
| Instrument type | Ocean colour instruments, Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See HY-1B (Haiyang-1B) / Ocean-1B summary |
HY-1B (Haiyang-1B) / Ocean-1B
HY-1B (also spelling of: Hai Yang-1B) is the second of China's ocean observation satellites with the overall objective to survey ocean resources (ocean color and sea surface temperature) and monitoring the environment. The spacecraft and its payload is practically a duplicate of the HY-1A mission which took place from May 15. 2002 to April 2004. - The design life of HY-1B improved from two years to three years. The HY program is being developed the by CASC (Chinese Aerospace Science & Technology Corporation) and sponsored by the State Ocean Administration (SOA), Beijing, China.

Spacecraft
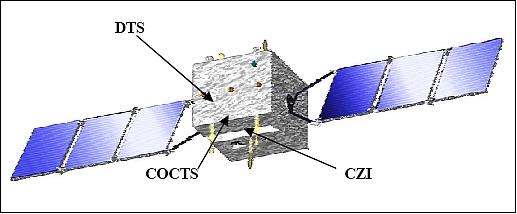
The structure of the spacecraft is based on the multi-mission CAST968 bus, a box-shaped satellite with overall dimensions of 1.4 m x 1.1 m x 0.953 m. The spacecraft was designed and developed by the DFH (Dongfanghong Satellite Corporation Ltd.), a spin-off company of CASC, Beijing, China. The total deployed length of HY-1 is about 7.5 m.
CAST968 platform comprises 8 subsystems such as structure and mechanism, thermal control, attitude and orbit control, power supply, TT&C, antenna, housekeeping and overall electric circuit subsystems. The main structure of the bus uses aluminum honeycomb sandwich panels.
The spacecraft is 3-axis stabilized (Earth pointing) using the bias momentum control technique. The AOCS (Attitude and Orbit Control Subsystem) employs three magnetorquers and hydrazine propulsion for attitude control and orbit change maneuvers; the attitude accuracy is 0.4º in roll and pitch and 0.5º in yaw. Attitude sensing is provided by digital sun sensors and infrared Earth sensors. The CAST968 bus uses a bias momentum control.
PPS (Power Supply Subsystem): S/C power of 510 W (EOL) is provided by two solar arrays of size 5.67 m2. In addition, there are two packs of NiCd batteries of 23 Ah for night phase power supply. The solar array articulation is provided by a small single-axis SADA (Solar Array Drive Assembly). Electric power distribution is provided at 28.5 V.
Active and passive thermal control is adopted in the satellite design to control the inside module temperature within the range of 0º to+45ºC. MLI (Multi-Layered Insulation), heat pipes, thermal control coatings, and electric heaters are being used. Some equipment, sensitive to temperature, such as the sensor complement, the battery and the fuel tank are actively controlled.
The S/C mass is 442.5 kg (including 13 kg of propellant); payload mass = 87 kg; the design life is three years. 1) 2)
RF Communications
The TT&C communication is in S-band, the downlink date rate is 4 kbit/s, the uplink rate is 2 kbit/s. A USB (Unified S-band) system is used for TT&C with GPS information for auxiliary orbit determination. There are two TT&C antennas to ensure communications with the ground at any satellite attitude configuration. The GPS orbit measure provides a location accuracy of 50 m. The TT&C subsystem is also being used for ranging measurements , determining the distance between the satellite and the ground station using Doppler signals.
An onboard storage capacity of 80 Gbit is provided. All payload data are downlinked in X-band using QPSK modulation at a data rate of 6.654 Mbit/s, EIRP = 39.4 dBm. The HY-1 payload data are being acquired at the Beijing and the Sanya ground receiving stations.
Support of mission types | Earth observation, communication, technology demonstrations | |
Design life | 3-5 years | |
Orbit type | Sun-synchronous orbit | |
Spacecraft mass, power | 100-400 kg, 250 - 1000 W | |
AOCS (Attitude and Orbit Control Subsystem) | Control type | bias-wheel and magnetic torquer control to achieve three-axis stability |
Attitude determination accuracy (3-axis) | ≤ 0.2º (3σ) | |
Attitude pointing accuracy (3-axis) | ≤ 0.4º (3σ) | |
Attitude stability (3-axis) | ≤ 0.01º/s (3σ) | |
TTCS (Telemetry & Telecommand Subsystem) | Communication network | CAN (Controller Area Network) bus |
Telemetry module mode | PCM/DPSK/PM | |
TT&C communication band | S-band | |
Telecommand data rate range | 2-8 kbit/s | |
Telemetry data rate range | 4-16 kbit/s | |
DTS (Data Transmission Subsystem) | DT band (payload) | X-band |
Onboard data storage capacity | 128 Gbit | |
Max transmission rate | 320 Mbit/s | |
Launch
launch of HY-1B spacecraft took place on April 11, 2007 on an LM-2C vehicle from the Taiyuan Launch Center in China. 3) 4)
Orbit
Sun-synchronous near-circular orbit, altitude = 798 km, inclination =98.8º; nodal period = 100.8 minutes; the local time at the descending node is between 9:30 and 10:30 hours (at the end of two year's life). The revisit time for the Ocean Color Scanner is every day; the revisit time for the CCD Camera is seven days.
Mission Status
• The HY-1B spacecraft is operational in 2012.
• The spacecraft and its payload are operating nominally as of 2009. 5)
• HY-1B is operational. As of early October 2007, China's State Oceanic Administration (SOA) has formally taken over the operational control of the HY-1B spacecraft. 6)
• Test operations of HY-1B started on Sept. 30, 2007.
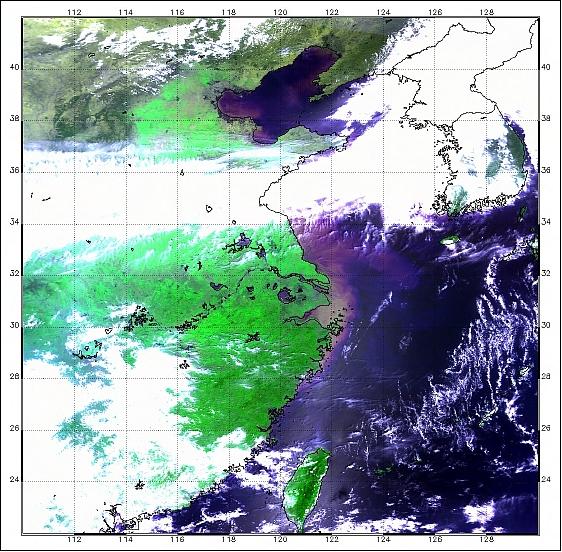
• The first images from HY-1B were received at the data collection center in Beijing on April 20, 2007 indicating that the satellite was in good condition and functioning well.
Sensor Complement
The data user of both instruments is SOA (State Ocean Administration) as well as all institutes in China dealing with marine data processing. 7)
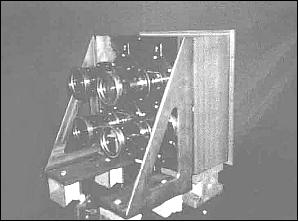
COCTS (Chinese Ocean Color and Temperature Scanner)
COCTS is a medium-resolution optical imager developed by SITP (Shanghai Institute of Technical Physics) of CAS (China Academy of Sciences), China. The objective of the radiometer is global ocean color monitoring for the study of biological oceanography, including chlorophyll concentration, suspended sediment concentration, dissolved organic matter, pollutants, as well as sea surface temperature. COCTS consists of the following subsystems: optics, scanner, FPA (Focal Plane Array) and an electronics box. Imagery is provided in 8 VNIR (Visible Near Infrared) and in two TIR (Thermal Infrared) bands with a spatial resolution of 1.1 km. The swath width is ~1600 km. The instrument data rate is 0.67 Mbit/s. 8) 9) 10) 11)
The design characteristics of COCTS are similar to those of SeaWiFS (Sea-Viewing Wide Field-of-View Sensor) flown on the OrbView-2 mission of ORBIMAGE (launch Aug. 1, 1997), and to those of OCTS (Ocean Color and Temperature Scanner) flown on ADEOS (launch Aug. 17, 1996).
Pixel resolution | 1.1 km (nadir) | |
FOV (swath), Pixels per scan line | ±55º (2800 km) | |
Focal length of optical system | 650 mm for VNIR, 190 mm for TIR | |
Telescope aperture diameter | 200 mm | |
Detectors | Si for VNIR, HgCdTe for TIR | |
Whiskbroom instrument | Scan mirror assembly; there are four parallel scan lines along-track | |
Deviation of central wave length | 2 nm | |
Data quantization | 10 bit | |
Cooling temperature | 80 K for TIR bands (Stirling cooler) | |
Instrument mass, power | 50 kg, average = 29.3 W, peak = 41.7 - 71.7 W | |
Spectral range (µm) | SNR | Dynamic range (%) | Observation objective |
0.402 - 0.422 | 440 | 40 | Yellow substance, water pollution |
0.433 - 0.453 | 600 | 35 | Absorption of chlorophyll |
0.480 - 0.500 | 590 | 30 | Chlorophyll, sea water optics sea ice |
0.510 - 0.530 | 560 | 28 | Chlorophyll, water depth, |
0.555 - 0.575 | 525 | 25 | Chlorophyll, sediment of low concentration |
0.660 - 0.680 | 390 | 20 | Peak of fluorescence, sediment of high concentration, pollution, atmospheric correction, aerosols |
0.730 - 0.770 | 400 | 15 | Sediment of high concentration, atmospheric correction |
0.845 - 0.885 | 415 | 15 | Atmospheric correction, water vapor |
10.30 - 11.40 (TIR) | NEΔT = 0.2 K (at 300 K) | SST (Sea Surface Temperature), sea ice, temperature of cloud top | |
11.40 - 12.50 (TIR) | NEΔT = 0.2 K (at 300 K) | SST, sea ice, temperature of cloud top | |
In-Flight Calibration of COCTS
Although there is an onboard calibration system for the TIR (Thermal Infrared) bands of COCTS, it has experienced some aging after in-flight operations for one year. To validate the onboard calibration system, a target on Earth is selected to calibrate the TIR bands. The calibration method of Palmer and Slater, using the normalized water-leaving radiance and aerosol parameters derived for SeaWiFS, has already been successfully demonstrated. 12) 13)
In China, Lake Qinhai is the most suitable site for calibrating thermal infrared bands of various satellite sensors. A team lead by NSMC (National Satellite Meteorology Center), Beijing, performed the TIR-band calibration experiments in the period Aug. 8-15, 2003. This method was also used to supervise the calibration coefficient of COCTS. 14) 15)
CZI (Coastal Zone Imager)
CZI is a multispectral pushbroom CCD instrument developed by the Beijing Institute of Space Machines and Electricity, a facility of CAST. The objective is to provide in particular imagery of coastal regions (estuaries, tidal waters, monitoring of pollution, etc.). CZI has a repeat period of 7 days.
Note: the instrument is also referred to as the “4-band CCD Imager.”
Spectral ranges (µm), 4 bands | 0.42 - 0.50, (pollution, vegetation, ocean color, sea ice) |
Pixel resolution, number of pixels per line | 250 m (nadir), 2048 |
Pixel size (µm) | 10 x 10 |
Focal length of optical system | 32 mm |
FOV (Field of View), swath width | 36º, or 500 km swath width |
Deviation of center wavelength | < 5 nm |
SNR | 641 |
Data quantization | 12 bit |
Instrument mass, power | 15 kg, average = 6 W, peak = 30 W |
Instrument data rate | 2.67 Mbit/s |

Ground Segment
The ground segment consists of the following stations:
1) Beijing (NSOAS/SOA): Receive raw data in real time acquiring, processing, archiving and managing, distributing and analyzing the HY-1 mission
2) Hangzhou (SIO/SOA): Receive raw data in real time acquiring, processing, archiving and managing, applying and analyzing the HY-1 mission
3) SanYa, NSOAS/SOA: Receive raw data in real time and transfer to Beijing
4) Mudanjiang: In the buildup phase as of 2008.
References
1) Information provided by Lihua Zhang of CAST by Mingsen Lin of SOA, and by Xiaolong Dong of NMRS, Beijing, China
2) Lili Wang, Zhaoguang Bai, “Practical CAST 968 Platform used in HY-1B Satellite,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.3.11
3) http://news.xinhuanet.com/english/2007-04/11/content_5962743.htm
4) http://www.ioccg.org/sensors/HY-1B.ppt
5) Haiqing Huang, Yan Zhou, Pan Delu, Yan Bai, “The second Chinese ocean color satellite HY-1B and future plans,” Proceedings of. SPIE, 'Remote Sensing of Inland, Coastal, and Oceanic Waters,' Noumea, New Caledonia (Pacific), Nov. 17-21, 2008 Vol. 7150, 71501N; DOI:10.1117/12.804895
6) “China Puts Second Oceanic Survey Satellite Into Operation With More To Come,” Oct. 4. 2007, URL: http://www.spacedaily.com/reports/China_Puts_Second_Oceanic_Surve...
7) Pan Delu, “New developments with Haiyang 1B (HY-1B) ocean color satellite,” Report to 13th IOCCG (International Ocean-Color Coordinating Group) Committee Meeting, UNESCO HQ, Paris, France, Feb. 12-14, 2008, URL: http://www.ioccg.org/sensors/HY-1B.pdf
8) Q. Feng, Q.-B, Zheng, H.-X. Gong “10-Bands Ocean Color and Temperature Scanner,” ACRS (Asian Conference on Remote Sensing), Hong Kong, China, Nov. 22-25, 1999
9) P. Delu, H. Xinqing. “Development of ocean color remote sensing in China in 2002,” 8th IOCCG Meeting, Florence, Italy, Feb. 24-26, 2003, URL: http://www.ioccg.org/sensors/chinese/development.ppt
10) Pan Delu, “Satellite marine remote sensing in China,” Proceedings of the SPIE, Vol. 4892, 2003, pp. 1-16 , `Ocean Remote Sensing and Applications,' Edited by Robert J. Frouin, Yuan, Yeli, Kawamura, Hiroshi
11) Xingwei Jiang, Mingsen Lin, Junwu Tang, “The Programs of China Ocean Observation Satellites and Applications,” SOA, CEOS WGCV-28, Feb. 26-29, 2008, Sanya, China
12) P. N. Slater, S. F. Biggar , K. J. Thome, D. I. Gellman, P. R. Spyak, “Vicarious radiometric calibrations of EOS sensors[J], Journal of Atmospheric and Oceanic Technology, 1996, Vol. 13, No 2, 1996, pp. 349-359
13) J. M. Palmer, “Calibration of satellite sensors in the thermal infrared [C], Proceedings of .SPIE, 1993, Vol. 1762: pp. 108-117
14) J. Tong, K. Qiu, X. Li, “Absolute Radiometric Calibration for Thermal Infrared Bands of HY-1/COCTS by Using Qinhai Lake,” Proceedings of IGARSS 2004, Anchorage, AK, USA, Sept. 20-24, 2004
15) J. Tong, K. Qiu, X. Li, J. Qin, Y. Zhang, X. Hu, “Absolute Radiometric Calibration of HY-1 COCTS Using the Reflectance-based Method,” Proceedings of IEEE/IGARSS 2003, Toulouse, France, July 21-25, 2003
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).