INSAT-3D and 3DS (Indian National Satellite - 3D and 3DS)
EO
Atmosphere
Ocean
Atmospheric Temperature Fields
Launched in July 2013, the Indian National Satellite - 3D (INSAT-3D), is a meteorological mission owned and operated by ISRO (Indian Space Research Organisation). INSAT-3D aims to provide enhanced meteorological observations and monitoring of land and ocean for weather forecasting and disaster warning.
On 8 February 2024, ISRO launched INSAT-3DS, a follow up mission to INSAT-3D, with many improvements to mitigate issues related to black-body calibration, and midnight sun-intrusion.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Operational (extended) |
| Launch date | 26 Jul 2013 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Atmospheric Temperature Fields, Radiation budget, Surface temperature (land), Surface temperature (ocean), Atmospheric Humidity Fields, Snow cover, edge and depth, Atmospheric Winds |
| Measurement detailed | Atmospheric specific humidity (column/profile), Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, Snow cover, Wind profile (horizontal), Snow surface temperature, Upwelling (Outgoing) long-wave radiation at Earth surface |
| Instruments | Imager (INSAT 3D), Sounder (INSAT) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See INSAT-3D and 3DS (Indian National Satellite - 3D and 3DS) summary |
Summary
Mission Capabilities
INSAT-3D and 3DS carry two instruments, INSAT-3D imager and INSAT sounder. The INSAT-3D imager is an improved version of the Very High Resolution Radiometer (VHRR-2) flown aboard INSAT-3A, and aims to provide more accurate and higher resolution meteorological observations than previous missions in the INSAT series. The INSAT sounder is a radiometer developed by ISRO specifically for the geostationary INSAT series which aims to measure temperature and humidity profiles to enable three dimensional modelling of the atmosphere for analysis of cloud cover and meteorological predictions.
Performance Specifications
The INSAT-3D imager operates in six channels over a spectral range of 0.55 µm - 12.5 µm : visible(VIS), Shortwave Infrared (SWIR), Medium-Wave Infrared (MWIR), Water Vapour (WV),Thermal Infrared-1 (TIR-1) and Thermal Infrared-2 (TIR-2) It has a spatial resolution of 1 km for VIS and SWIR, 4 km for MWIR, TIR-1 and TIR-2 and 8 km for WV, as well as instantaneous field of view (IFOV) of 28 µrad for VIS and SWIR,112 µrad for MWIR, TIR-1, & TIR-2 and 224 µrad for WV . The INSAT sounder operates in 19 bands, with 18 Infrared(IR) bands, and one visible (VIS) band.It is capable of four simultaneous soundings per band. It has centre wavelengths ranging from 14.71 µm - 3.74 µm in the IR bands and 0.695µm in the VIS band, with an IFOV of 290 µrad x 280 µrad, corresponding to a spatial resolution of 10 km x 10 km on the surface.
INSAT-3D operates in a geostationary orbit of 35,786 km, at a location of 82°E over the equator.
Space and Hardware Components
INSAT-3D and 3DS also carries two non-instrument payloads, the Data Relay Transponder (DRT) and Satellite Aided Search and Rescue (SAS&R). DRT receives globally collected metrological, hydrological and oceanographic data from automatic Data Collection Platforms(DCPs) and relays it back to downlink, while SAS&R relays distress signals and detects alerts from beacon transmitters, for international search and rescue purposes. INSAT-3D and 3DS uses a momentum-biassed 3-axis stabilised spacecraft with star trackers for precise pointing control. It had a launch mass of approximately 2060 kg, with a nominal design life of 7.7 years, which it has exceeded. The INSAT-3D and 3DS bus houses the six satellite subsystems, Thermal Control Subsystem (TCS), Bus Management Unit (BMU), Electrical Propulsion Subsystem (EPS), Attitude and Orbit Control Subsystem (AOCS ), Liquid Apogee Motor (LAM) and Radio Frequency (RF) communications. The INSAT-3D mission used the INSAT-2/-3 bus, manufactured by ISRO.
INSAT-3D and 3DS (Indian National Satellite - 3D and 3DS)
Overview Spacecraft Launch Mission Status Sensor Complement References
INSAT-3D and 3DS are meteorological satellites of ISRO, two exclusive next-generation missions designed for enhanced meteorological observations and monitoring of land and ocean surfaces for weather forecasting and disaster warning. The missions goals call for a significant technological improvement in sensor capabilities as compared to earlier INSAT missions. The meteorological payload features an imager and a sounder. 1) 2) 3) 4) 5) 6) 7)
The main objectives for these missions are to provide an operational, environmental and storm warning system to protect life and property.
INSAT-3D
INSAT-3D will:
• Monitor earth's surface and carryout oceanic observations and also provide data dissemination capabilities
• Provide BSS (Broadcast Satellite Services) through two S-band transponders.
The mission and its applications involves a technical and scientific cooperation between the following partners in India and the USA:
• Ministry of Earth Sciences(MoES) / India Meteorological Department (IMD) and
• NOAA /NESDIS (National Oceanic and Atmospheric Administration / National Environmental Satellite Data and Information Service)
NOAA/NESDIS has successfully collaborated with MoES/IMD by establishing a communication link for the exchange of INSAT satellite data & publicly available U.S. Earth observations, in operation since 1999. The establishment of the Indo-US Data Center at IMD, New Delhi has further enabled scientists to access data from India's Kalpana & INSAT satellites as well as U.S. Earth observation data & information.
These two developments have led to a variety of scientific applications of satellite data in India & the USA. The United States wishes to expand this collaboration to include INSAT-3D Imager & Sounder data when the satellite is launched in 2011 (Ref. 4).
A MOU between NOAA and MoES was signed in 2008. In this cooperation agreement:
• NOAA/NESDIS intends to provide NOAA GOES versions of scientific algorithms and programs for operational implementation at IMD. These include source programs for rainfall estimation, sea surface temperature retrieval, vegetation index retrieval, clouds classification, cloud motion vector (visible and infra red) & water vapor winds.
• IMD will provide operational, processed, navigated/calibrated INSAT‐3D data to NOAA/NESDIS through an already established dedicated communication link between IMD and NESDIS.
INSAT-3DS
The INSAT-3DS Satellite is a follow-on mission of Third Generation Meteorological Satellite from Geostationary Orbit. The INSAT-3DS mission is fully funded by the Ministry of Earth Sciences (MoES), with significant contributions from Indian industry to the construction of the satellite. It is designed for enhanced meteorological observations and monitoring of land and ocean surfaces for weather forecasting and disaster warning. The satellite will augment the Meteorological services along with the presently operational INSAT-3D and INSAT-3DR satellites.
Various departments of the Ministry of Earth Sciences (MoES) such as the India Meteorology Department (IMD), National Centre for Medium-Range Weather Forecasting (NCMRWF), Indian Institute of Tropical Meteorology (IITM), National Institute of Ocean Technology (NIOT), Indian National Center for Ocean Information Services (INCOIS) and various other agencies and institutes will be using the INSAT-3DS Satellite data to provide improved weather forecasts and meteorological services.
Primary Objectives of the Mission
- To monitor Earth’s surface, carry out Oceanic observations and its environment in various spectral channels of meteorological importance
- To provide the vertical profile of various meteorological parameters of the Atmosphere
- To provide the Data Collection and Data Dissemination capabilities from the Data Collection Platforms (DCPs)
- To provide Satellite Aided Search and Rescue services 29)
Spacecraft
INSAT-3D
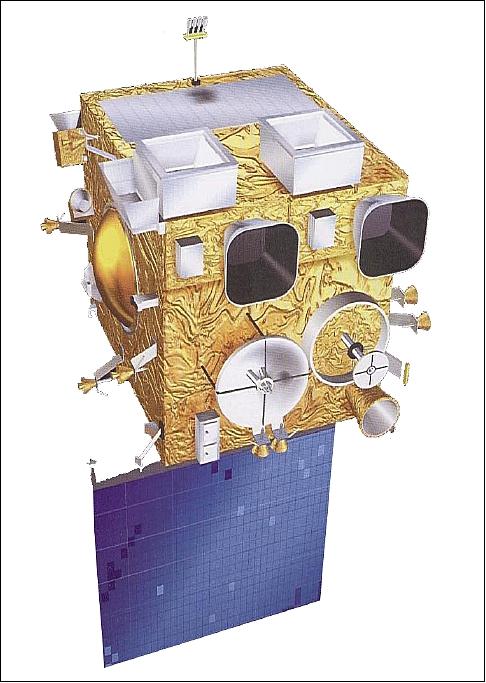
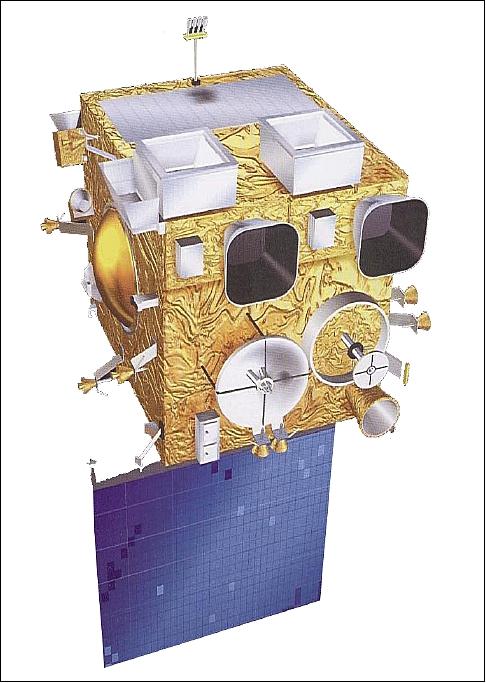
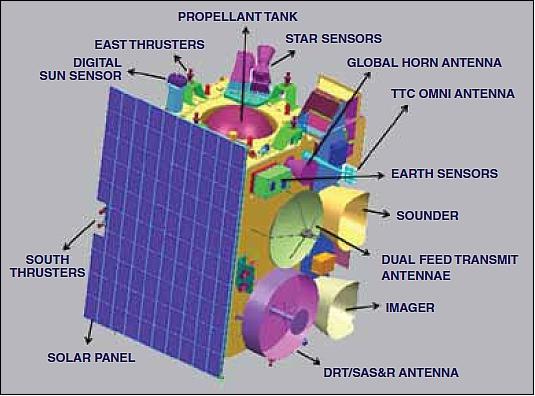
The INSAT-3D is a momentum-biased 3-axis stabilized spacecraft using star trackers for precise pointing control. The spacecraft has a launch mass of ~2060 kg, providing a power of ~ 1.1 kW. The nominal design life is 7.7 years.
The structure is a cuboid with a central cylinder which accommodates two propellant tanks. The bipropellant propulsion system uses fuel (MMH) and oxidizer (N2O4) for various attitude and orbital maneuvers of the spacecraft. The structure is made of honeycomb panels with aluminum/CFRP face-sheets to make the structure lightweight.
TCS (Thermal Control Subsystem): Thermal control of the spacecraft is a passive control with heaters mounted at various locations for controlling temperature. The temperature control of the payload infrared detectors is important for the success of the payload. The required detector temperature of less than 95 K is achieved by employing a passive cooler. The achievement of 95 K is not only dependant on cooler design but also on the heat load falling in the cooler FOV (Field of View). This heat load is minimized by not allowing any object to come into the FOV of the coolers and also by incorporating a bi-annual yaw rotation of the spacecraft so that the cooler face is not exposed to sun's radiation during solstices.
BMU (Bus Management Unit): The BMU is a microprocessor system with redundancies based on a MAR 31750 processor and MIL-STD-1553 interface. It is used for achieving the functions of telemetry, telecommand and control electronics. The system interfaces with all other subsystems for telemetry and telecommand functions. It interfaces with sensors, inertial systems and the propulsion systems for attitude and orbit control functions. The BMU software has been developed in ADA language.
EPS (Electrical Propulsion Subsystem): The spacecraft has a deployable solar panel. The panel uses high efficiency ATJ (Advanced Triple Junction) solar cells and produces 1164 W of power. The power to the spacecraft during eclipse is provided by two 18 Ah NiCd chemical batteries. The power electronics provide the bus regulation from which power is taken to the various subsystems. To get the various voltage and current values, high efficiency distributed DC/DC converters are used. The SADA (Solar Array Drive Assembly) technique is implemented to reduce the spacecraft disturbances (micro stepping device).
AOCS (Attitude and Orbit Control System): INSAT-3D is a momentum-biased 3-axis stabilized spacecraft using star trackers for precise pointing control. There are stringent payload pointing requirements which the control system has to provide. The payload short term and long term stability are required to be 2 visible pixels (56 µrad) and 4 visible pixels (112 µrad) for navigation. These requirements are met by providing compensation to scan mirror servo in terms of MMC (Mirror Motion Compensation) and IMC (Image Motion Compensation). The algorithm for these compensations are stored in control electronics, errors are computed and real-time corrections are carried out.
The various sensors used for attitude sensing are ES (Earth Sensors), DSS (Digital Sun Sensors), CASS (Coarse Analog Sun Sensor), SPSS (Solar Panel Sun Sensors) and the Star Sensors. The star sensors have been configured to provide higher accuracies for image processing. The sun sensors are used for initial attitude acquisitions and other maneuvers while the earth sensors are prime sensors for on-orbit attitude control.
LAM (Liquid Apogee Motor): The spacecraft is injected into GTO (Geosynchronous Transfer Orbit) and then raised into GEO, using the 440 N LAM system. There are twelve 22 N bipropellant thrusters for initial attitude maneuvers and for on-orbit station keeping. The two momentum wheels and one reaction wheel provide on-orbit attitude stabilization.
RF communications: Due to high data rate from the Imager payload, the bandwidth requirement increases for the meteorological transmitter; a total 30 MHz bandwidth is allocated for the communication payload in INSAT-3D from 4770 - 4800 MHz in the Extended C-band. This will also provide for growth of MET payload data rate in future. The transponders consist of redundant transmitters, redundant receivers and associated antenna. The antenna system consists of an omnidirectional antenna system for both up and down links and additional global horn for downlink.
The 4500-4510 MHz downlink transmit frequency band is allocated for DRT (Data Relay Transponder) and SAS&R (Satellite Aided Search & Rescue) transponder to maintain the present service network requirements and also to avoid interference from the spectrum roll off from the MET modulated carriers to ensure good C/I at the ground receivers for the demodulation of the carrier. The DRT will receive the signals from various DCPs (402.65 to 402.85 MHz UHF band) in random ALOHA mode. These uplink carriers are located within ±100 kHz band around the center frequency. The translated downlink frequency is at 4506.5 MHz with a bandwidth of 200 kHz. 8)
Payload | Uplink frequency | Downlink center frequency | Polarization Tx, Rx (wrt S/C) |
DRT | 402.75±0.1 MHz | 4506.05 MHz | L-V LHCP |
SAS&R | 406.05 MHz | 4507 MHz | L-V LHCP |
Imager | - | 4781 MHz | L-V |
The communication payload components are: Meteorological Transmitter, Data Relay Transponder, SAS&R (Satellite Aided Search and Rescue) Transponder & S-band Broadcast Satellite Services Transponder. All communication components have a mass of ~70 kg.
Spacecraft mass, size | 2060 kg (launch mass), 2.4 m x 1.6 m x 1.5 m |
Spacecraft dry mass | 958.5 kg |
Power | 1164 W, two 18 Ah Ni-Cd batteries |
AOCS | Momentum-biased 3-axis stabilized spacecraft, using sun sensors, star trackers, and gyroscopes for attitude sensing, actuation is provided with momentum and reaction wheels, magnetic torquers and thrusters. |
Propulsion | 440 N LAM (Liquid Apogee Motor) and twelve 22 N thrusters with MMH (Mono Methyl Hydrazine) as fuel and MON-3 (Mixed Oxides of Nitrogen) as oxidizer |
Antennas | 0.9 m and 1.0 m body-mounted antennas |
Mission design life | 7.7 years |


INSAT-3DS
The satellite will provide meteorological services to India using a 6-channel imager and a 19-channel sounder, as well as search and rescue information, and message relay for terrestrial data collection platforms. Compared to its predecessors, INSAT-3DS presents many improvements to mitigate issues related to black-body calibration, and midnight sun-intrusion. 30)
Satellite Features
| Mission | Meteorological services Data relay and Satellite Aided Search & Rescue services |
|---|---|
| Payloads | 6 channel Imager 19 channel Sounder Data Relay Transponder (DRT) Satellite Aided Search & Rescue transponder (SAS&R) |
| Orbit | Geostationary orbit |
| Structure | I-2k platform |
| Thermal | 6 channel Imager Passive and active thermal control system Bi-annual yaw flip to reduce the thermal load on the passive coolers |
| Power generation | 42 V Sunlit regulated single bus Power generation 1505W (Equinox) I-2k Solar panels and Li-Ion 100Ah Battery for eclipse support |
| Launch vehicle | GSLV with 4 m diameter. Ogive Payload Fairing Standard 937 mm diameter. interface |



Launch
The INSAT-3D, a weather satellite of ISRO, was launched as a passenger payload on July 25,2013 on an Ariane-5 ECA vehicle from Kourou, French Guiana. - The primary payload on this flight was AlphaSat/InmarSat I-XL, a technology/communication satellite of ESA/InmarSat (launch mass of ~ 6650 kg). The flight was designated as VA214 in Arianespace's numbering system. 12) 13) 14)
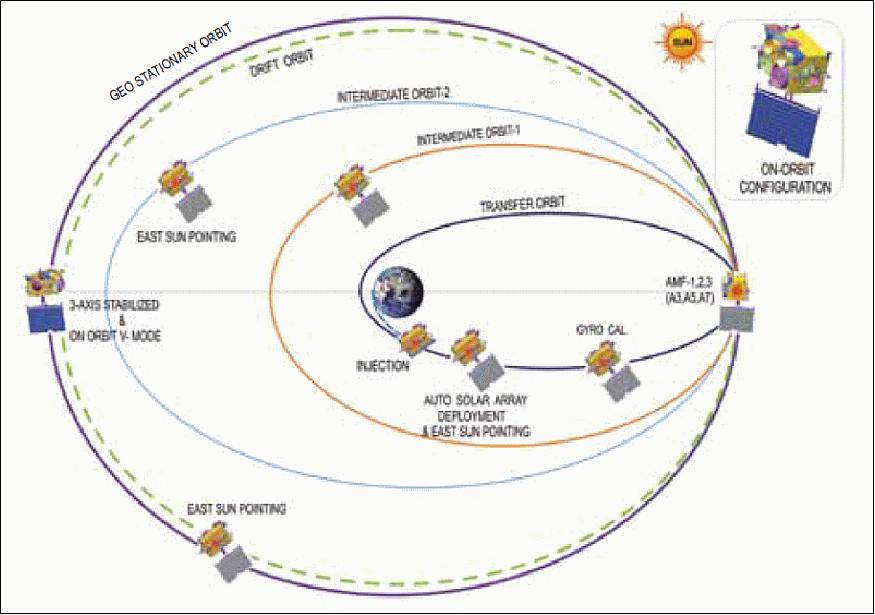
After a flight of 32 minutes and 48 seconds, INSAT-3D was deployed into an elliptical GTO (Geosynchronous Transfer Orbit). Soon after the separation of INSAT-3D from Ariane-5's upper cryogenic stage, the solar panels of INSAT-3D deployed automatically and ISRO's MCF (Master Control Facility) at Hassan in Karnataka took over the control of the spacecraft. 15)
Orbit: Geostationary orbit, altitude ~35,786 km, INSAT-3D spacecraft location at 82º East over the equator.
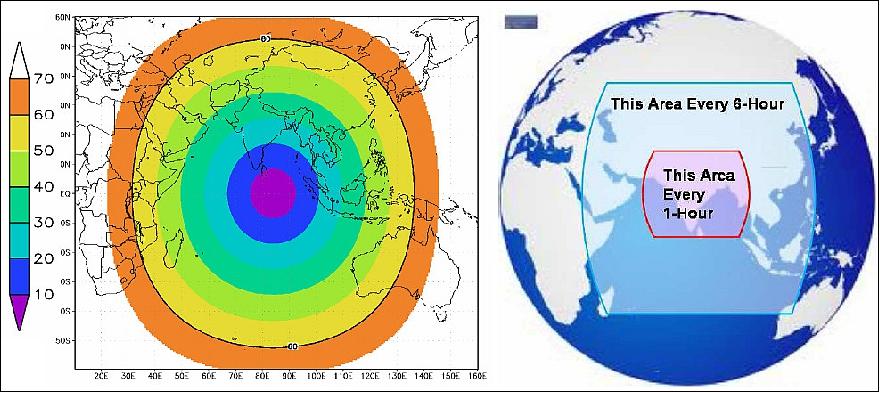
Legend to Figure 7: A scan of 6000 x 6000 km takes 160 minutes; the land mass of India can be scanned in ~40 minutes.
INSAT-3DS was launched on 17 February 2024 off atop a Geosynchronous Satellite Launch Vehicle (GSLV) at 7:05 a.m. EST (1205 GMT; 5:35 p.m. local India time) from Satish Dhawan Space Centre on India's southeast coast.
Orbit: Geostationary orbit, with an altitude of 35,786 kilometers above Earth.
Mission Status
• February 17, 2024: The Indian Space Research Organisation's INSAT-3DS satellite lifted off atop a Geosynchronous Satellite Launch Vehicle (GSLV) at 7:05 a.m. EST (1205 GMT; 5:35 p.m. local India time) from Satish Dhawan Space Centre on India's southeast coast.
The satellite, which was funded by India's Ministry of Earth Sciences, "is designed for enhanced meteorological observations and monitoring of land and ocean surfaces for weather forecasting and disaster warning," ISRO officials wrote in a mission description.
"The satellite will augment the meteorological services along with the presently operational INSAT-3D and INSAT-3DR satellites," they added.
Saturday's launch marked the 16th to date for the GLSV, which stands 169.6 feet (51.7 meters) tall and can deliver 4,960 pounds (2,250 kilograms) of payload to GTO. 28)

• The INSAT-3D spacecraft and its payload are operating nominally in 2016.
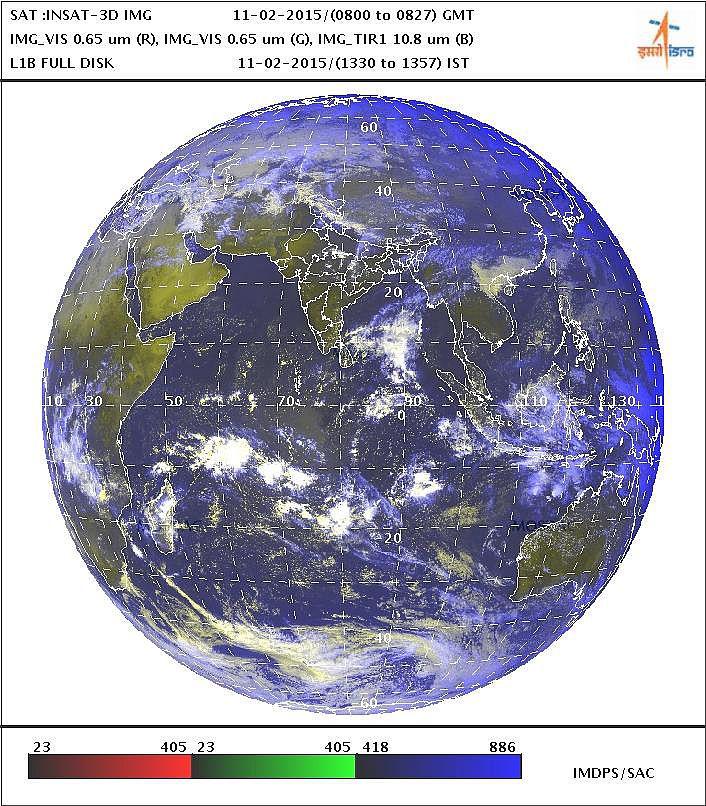
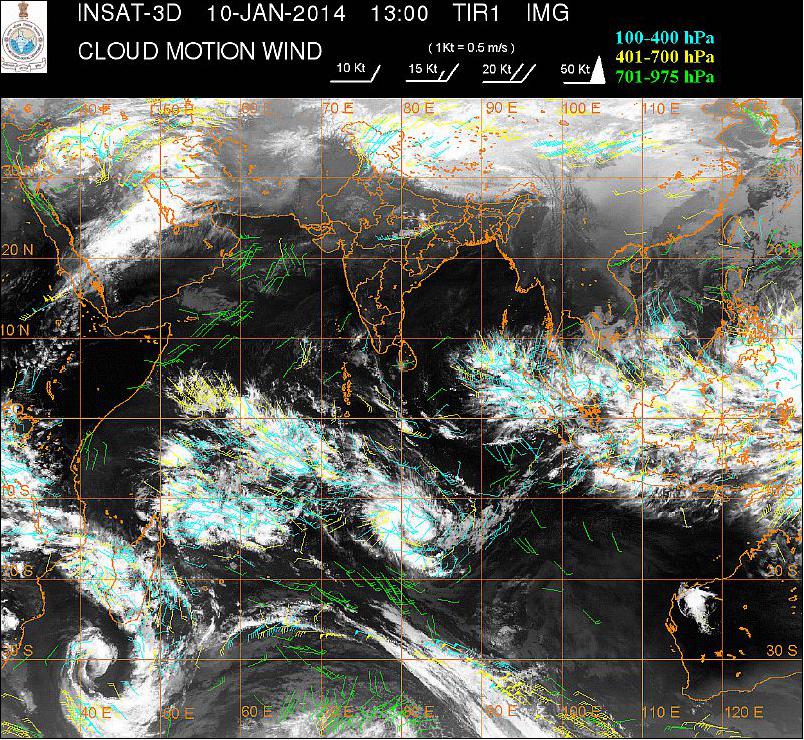
• On July 25, 2015, INSAT-3D completed two successful years on orbit. According to ISRO, the state-of-the-art instruments like "Imager" and "Sounder" onboard INSAT-3D satellite provide a wide range of atmospheric products such as cloud coverage images, atmospheric winds, sea and land surface temperatures,humidity, quantitative rainfall, Earth's radiation, atmospheric profiles, ozone, atmospheric stability parameters, fog, snow and aerosols. These products are immensely helpful in monitoring day-to-day weather and prediction of extreme events like tropical cyclone, thunderstorm, cloud burst and heat waves, it added. INSAT-3D has the distinction that its radiance observations and derived products are being operationally assimilated in numerical models operated by national weather prediction agencies like IMD and NCMRWF (National Center of Medium Range Weather Prediction). 17)
- In addition, leading international agencies like the ECMWF (European Center of Medium range Weather Forecast) and the UKMET (United Kingdom Meteorological Office) are also looking for possibilities to use INSAT-3D derived atmospheric winds in their global models.
• The INSAT-3D spacecraft and its payload are operating nominally in 2015. 18)
- In CGMS-42-IMD-WP-01, IMD (India Meteorological Department) informed CGMS (Coordination Group for Meteorological Satellites) that currently three Indian meteorological satellites are in operation: Kalpana-1, INSAT-3A and INSAT-3D. With the help of these three satellites, IMD is able to monitor several phenomena like, cyclones, western disturbances, thunderstorms, etc., and provide early warnings to the affected areas. 19)
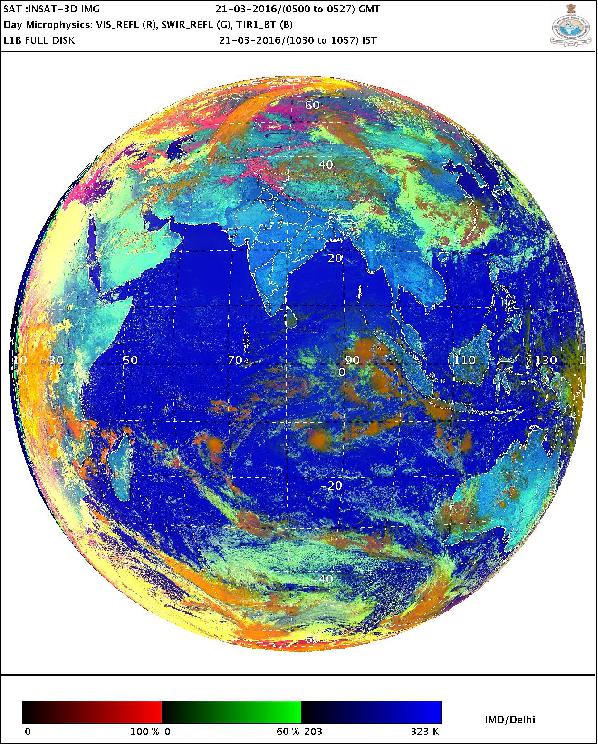
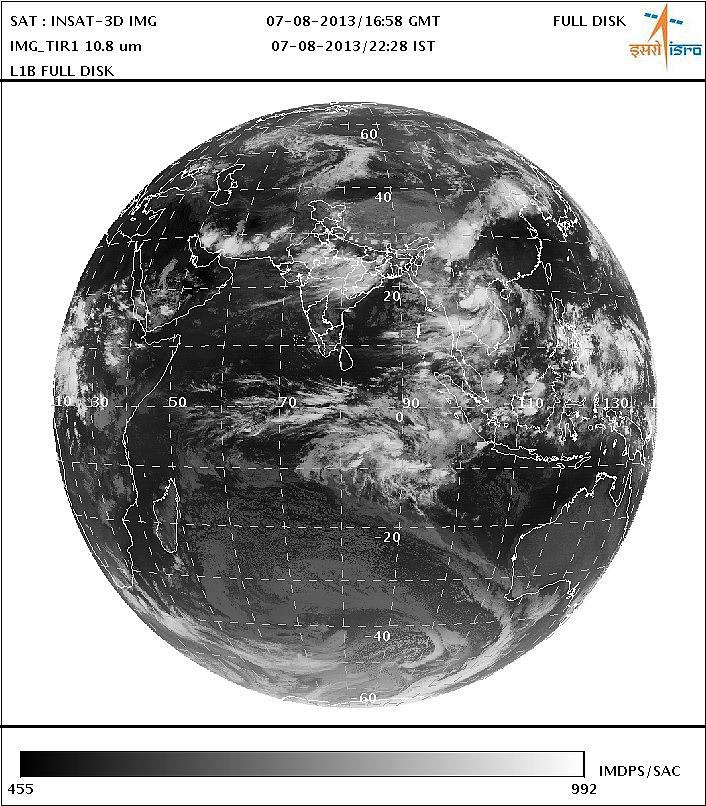
- The imager,VHRR/2 (Very High Resolution Radiometer-2), is capable of generating the images of the Earth in six wavelength bands significant for meteorological observations, namely, visible, shortwave infrared, middle infrared, water vapor and two bands in thermal infrared regions of the Earth disk every 26 minutes. It provides information on various parameters, namely, outgoing long-wave radiation, quantitative precipitation estimation, sea surface temperature, snow cover, cloud motion winds, etc.
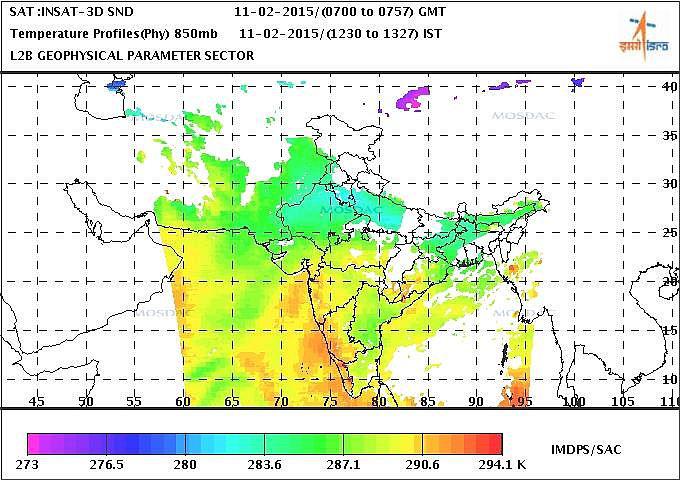
- The sounder provides data for the retrieval of vertical profiles of temperature and humidity over the clear sky region of the data-sparse Indian Ocean at a 10 km spatial resolution. INSAT-3D images and products are available through the dedicated web sites www.imd.gov.in and www.mosdac.gov.in on a near real-time basis.
• January 2014: India's advanced meteorological satellite INSAT-3D was declared operational on January 15, 2014. 20) 21)
• August 2013: The two meteorological payloads (Imaging System, Atmospheric Sounder) were activated on August 7 - 8, 2013. The performance of payloads is satisfactory and the preliminary images received are of good quality. The cameras are undergoing testing and are now in the commissioning phase.
• Aug. 1, 2013: After three orbit raising maneuvers, INSAT-3D is moving towards its final geostationary orbital location of 82º East longitude, and on August 6, 2013 it will reach this destination. 24)
• The first task is to perform orbit raising maneuvers on INSAT-3D , using the satellite's own propulsion system to place it into GEO at 35,786 km.
Sensor Complement
Metrological payload monitors Earth's surface and carries out oceanic observations and also provides data dissemination capabilities. It consists of:
• Six-band Imager
• Nineteen-band Sounder.
• DRT (Data Relay Transponder)
• SAS&R (Satellite Aided Search and Rescue)
The new generation meteorological spacecraft with advanced instruments is expected to enhance the observational capabilities over Indian Ocean region with two state-of-the art instruments. The SWIR channel of the INSAT-3D and 3DS Imager is expected to support new applications while the Sounder will provide vertical temperature and moisture profile for the first time on a 24 hour basis over the region (Ref. 2).
Imager
The Imager is an improved design of VHRR/2 (Very High Resolution Radiometer) heritage instrument flown on the Kalpana-1 and INSAT-3A missions. The instrument features 6 spectral bands (against the 3 bands in previous versions) offering an improved 1 km resolution in the visible band for the monitoring of mesoscale phenomena and severe local storms. The two new SWIR and MWIR bands with a resolution of 1 km and 4 km, respectively, will enable better land-cloud discrimination and detection of surface features like snow. One more significant improvement is the split-band TIR channel with two separate windows in 10.2-11.2 and 11.5-12.5 µm regions with a 4 km resolution. 25) 26) 27)
This new element will enable the extraction of sea surface temperature over the Indian region with a far greater accuracy since the dual-window algorithm can be applied to eliminate the atmospheric attenuation effects. The 1 km resolution of the visible channel and 4 km resolution of the thermal IR channels will indirectly improve the accuracy of the derived products like outgoing longwave radiation and cloud motion vectors.
Telescope aperture | 310 mm diameter |
Number of bands (6) | 0.55 - 0.75 µm, VIS (Visible) |
Spatial resolution | 1 km for VIS and SWIR |
Band separation, band definition | Beam splitter, interference filters |
IFOV (Instantaneous Field of View) | 28 µrad for VIS and SWIR (1 km) |
Sampling interval | 1.75 samples / IFOV for VIS, SWIR,MIR & TIR-1 / -2 3.5 samples / IFOV for WV |
Scan step angle | Linear in E-W direction (8 µrad step size) |
Scan rate | 200º/s +0.2 s turnaround time |
Scan modes | Full, normal and programmable sector for quick repetivity |
Frame time | 25 minutes for normal mode |
Signal quantization | 10 bit/sample |
Source data rate | 4.0 Mbit/s |
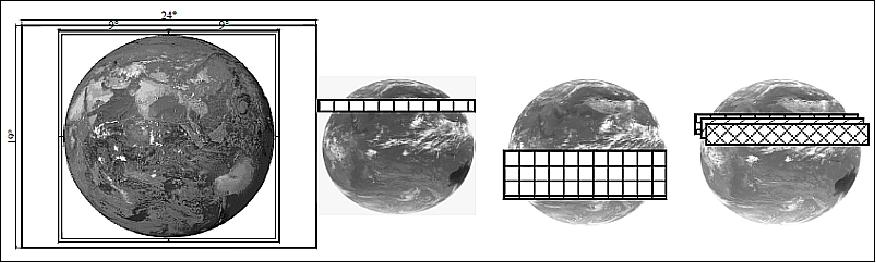
Figure 14 depicts the scanning geometry of the INSAT-3D and 3DS Imager for full disk and program mode in reference to FOR (Field of Regard). During a scan, the detector outputs for all the channels are sampled at a uniform rate. The sampling rate of detector output is 5460 samples/s for MIR, WV, TIR-1 and TIR- 2 channels and 21840 samples/s for the VIS and SWIR channels. This combined with scan rate of 20°/s (optical ) results in over-sampling of the detector output in fast scan direction by a factor of 1.75 for all channels except WV. The over-sampling ratio for WV channel is 3.5. Thus, each VIS and SWIR sample is 16 µrad E/W and each IR sample is 64 µrad E/W.
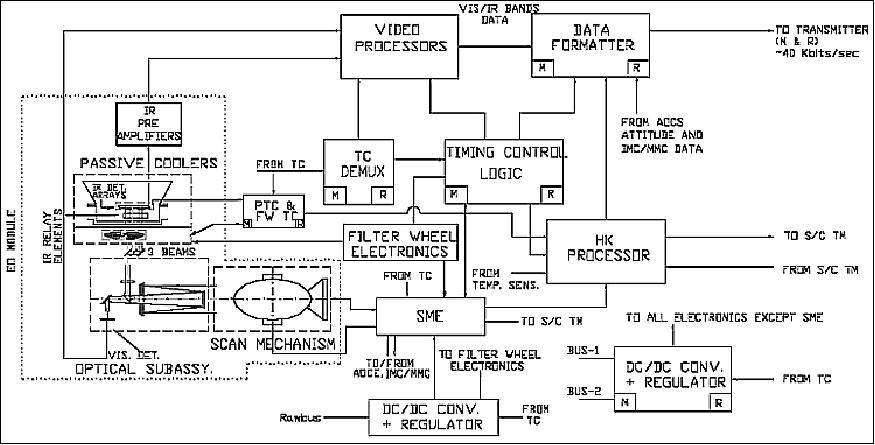
Imager: The Imager consists of an EO (Electro-Optics) module and a set of electronics packages including power-supply modules. A simplified block schematic of the instrument is shown in Figure 15. The EO module, containing the telescope, scan assembly, and detectors along with cooler, is mounted external to the spacecraft. The electronic packages are mounted on an internal panel of the spacecraft. The complete instrument has a mass of ~ 130 kg.
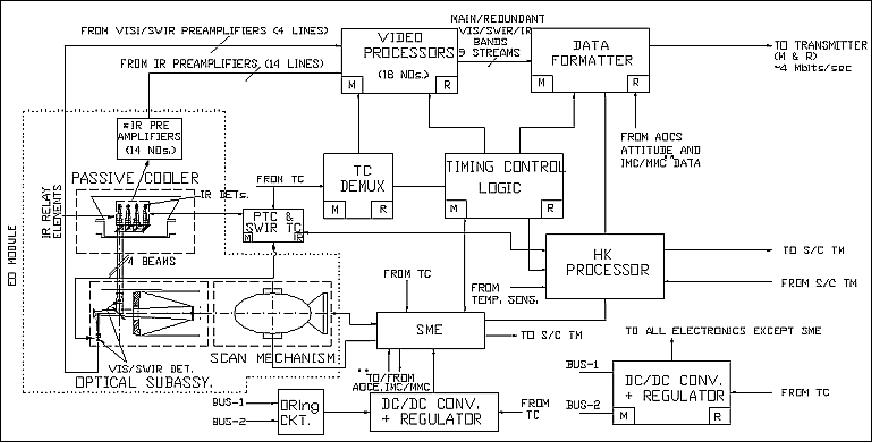
The motion of the scan mirror of the companion Sounder payload causes a small but well-defined disturbance of the spacecraft attitude. The effect of this disturbance on the pointing of the Imager scan mirror is calculated in real time by the spacecraft AOCS and a correction signal is sent to the Imager scan mechanism electronics. The AOCS also provides compensation signals that correct the scan mirror pointing for the expected spacecraft attitude and orbital effects. It is planned, that the expected attitude and orbital disturbance as a function of orbit position for next 24 hours, will be computed on the ground ; corresponding correction parameters will be uploaded to the AOCS. This scheme for real-time correction of the mirror pointing errors is expected to reduce the time required to process the received imagery on the ground and to make both companion payloads independent of each-other. A provision in the design exists to disable the correction scheme through a ground command.
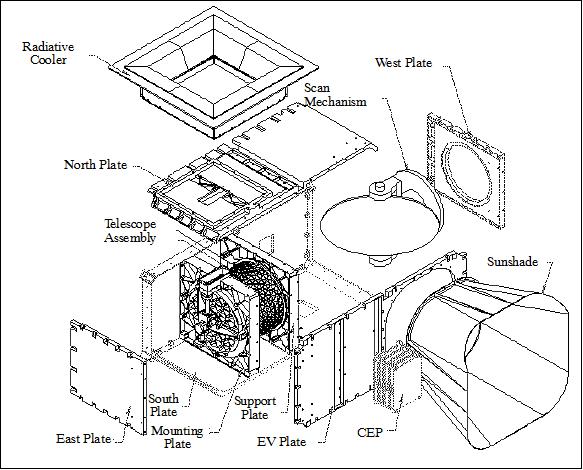
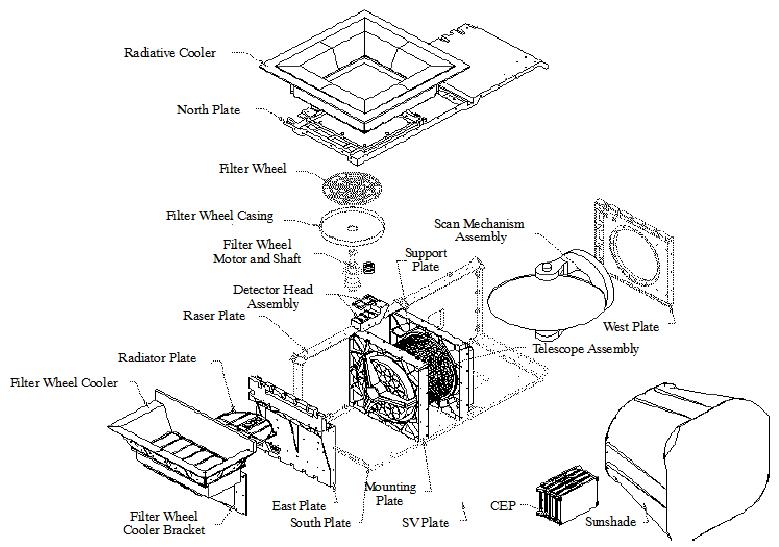
EO module: The EO module consists of scan mechanism assembly, telescope, aft optics, cooler assembly with cooled detectors, detector heads for un-cooled channels, preamplifiers, and view-port sunshade. An exploded view of the EO module is depicted in Figure 16.
The emitted radiation and the reflected sunlight from the scene pass through a view-port protected by a sunshade, then the precision flat scan mirror, controlled by a scan mechanism assembly, deflects the radiation into a reflective telescope. The energy collected and focused by the telescope and auxiliary optics is converted to electrical signals by a set of detectors. The electrical signals are amplified by preamplifiers for onward transmission to the electronics packages for further processing. The optical performance is maintained by restricting the EO module total temperature range to 25±10°C; the radiometric performance is maintained by limiting the temperature change between views of cold space (rate of change of temperature).
The scan mirror mechanism is a two-axes gimballed servo driven system to give the desired movement to an elliptical SiC (Silicon Carbide) mirror mounted at 45° to the optical axis. This scan mirror is driven about two orthogonal axes by independent servo loops. Each servo loop consists of an 'Inductosyn' which works as an angle encoder and error detector. The actuators of the servo feature two limited angle torquers which drive the fast-scan and slow-scan shafts. The minor axis of the scan mirror is the fast scan axis and provides scanning in the East-West direction. The slow scan axis provides North-South stepping to the mirror. The mirror swings ±4.5° (mechanical) in 0.9 s about the fast scan axis. This ±4.5° swing can be positioned in an overall ±6° FOR (Field of Regard), thus providing an 18° East-West scan of the Earth in a 24° FOR. The Earth's surface subtends at an angle of 17.4° from GEO so the Earth disc and the surrounding space is always scanned. At the end of each fast scan line, the mirror steps south by a distance equivalent to 8 km distance on the ground. In the fast scan direction, the data is collected for both the forward scan and the reverse sweeps of the mirror.
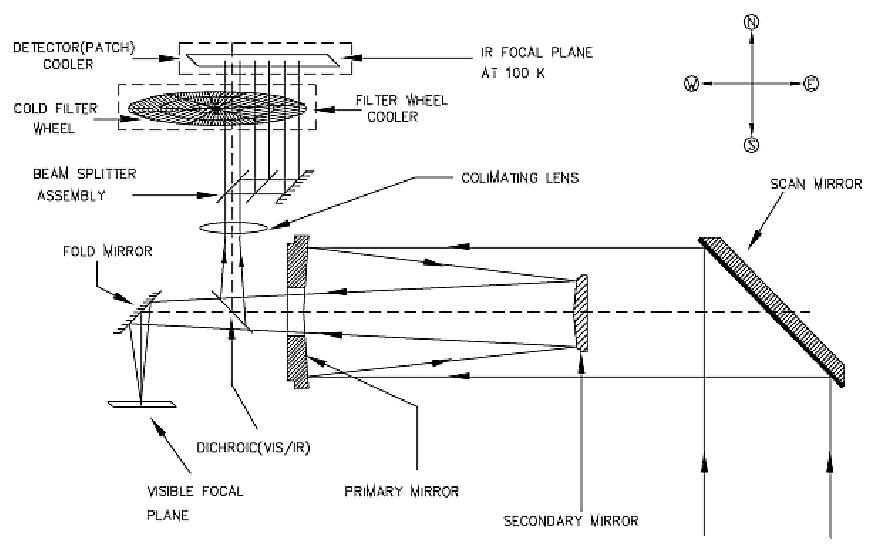
Optics subsystem: A schematic diagram of INSAT-3D optics subsystem is as shown in Figure 17. A Cassegrain telescope with a 310 mm diameter primary mirror, concentrates the energy onto a 50 mm diameter secondary mirror. The surface shape of this mirror forms a long focal length beam that passes the energy to the detectors via aft optics. The dichroic beam splitters in the aft optics separate the scene radiance into the spectral bands of interest.
There are five dichroic systems for beam separation. The first two dichroic systems separate the VIS and SWIR channels, respectively. The separated IR beam is collimated and passed through the remaining dichroic system. The separated four IR beams enter the passive radiant cooler through individual focus lens assembly before reaching the respective channel detectors. The field size and shape is defined by individual detector elements.
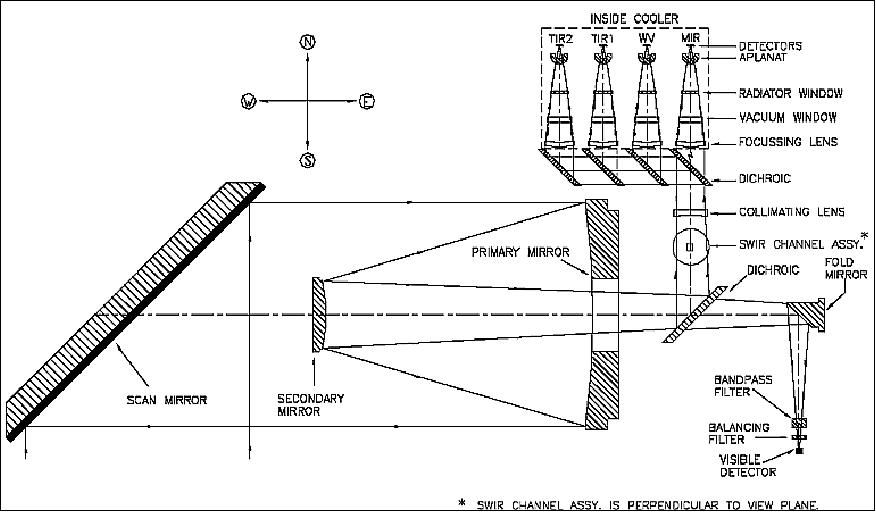
A three stage, passive radiant cooler with close-loop heater control maintains the cooled IR detectors at the nominal temperature of 95 K. The radiating surfaces of the cooler are thermally isolated from the rest of the instrument and are adequately shielded from the radiation from Earth. The rotation of the spacecraft about its yaw axis is planned once every six months to avoid sun radiation and to ensure that the low temperature is maintained throughout the year.
The VIS and SWIR detectors are silicon photodiodes and InGaAs (Indium Gallium Arsenide) material, respectively. They each contain sixteen elements (eight each for main and redundant arrays). Each element produces an instantaneous geometric field of view (IGFOV) that is nominally 28 microradians (µrad) on a side, which corresponds to a 1 km x 1 km pixel on the surface of the Earth at the spacecraft's nadir view.
Each VIS channel features a ROIC (Read-Out Integrated Circuit) in the same detector package using thick-film technology. The ROIC employs capacitive trans-impedance amplifiers followed by an 8:1 multiplexer and output buffer. This arrangement gives very low readout noise and simplifies the design of the detector signal processing circuit.
Two staggered arrays of eight elements of InGaAs photodiodes form the SWIR channel detector. The resistive trans impedance amplifiers, mounted external to the detector package, provide pre-amplification. The detector package is operated at a controlled temperature of 15°C.
Each of the MIR, TIR-1 and TIR-2 channel detector packages contains four detector elements (two each main and redundant), whereas the Water Vapor channel detector package contains two detectors (one each main and redundant). The detector element of MIR channel is an InSb (Indium Antimonide) photodiode. The remaining three channels employ photo-conductive HgCdTe (Mercury Cadmium Telluride) detectors. The high-impedance MIR detector needs buffering close to the detector element. Hence, the first stage of the preamplifier is integrated into the detector package.
Each detector element is square in shape, with an IGFOV of 112 µrad for MIR, TIR-1 and TIR-2, (corresponding to a square pixel 4 km per side at nadir) and 224 µrad for WV channel resulting in a suborbital pixel of 8 km on a side.
Though physically separated in the instrument, the detector arrays are optically registered. Deviations in this optical registration due to residual physical misalignments left after assembling the payload and to the size and separation tolerances of the detector elements can be corrected on the ground by the processing software.
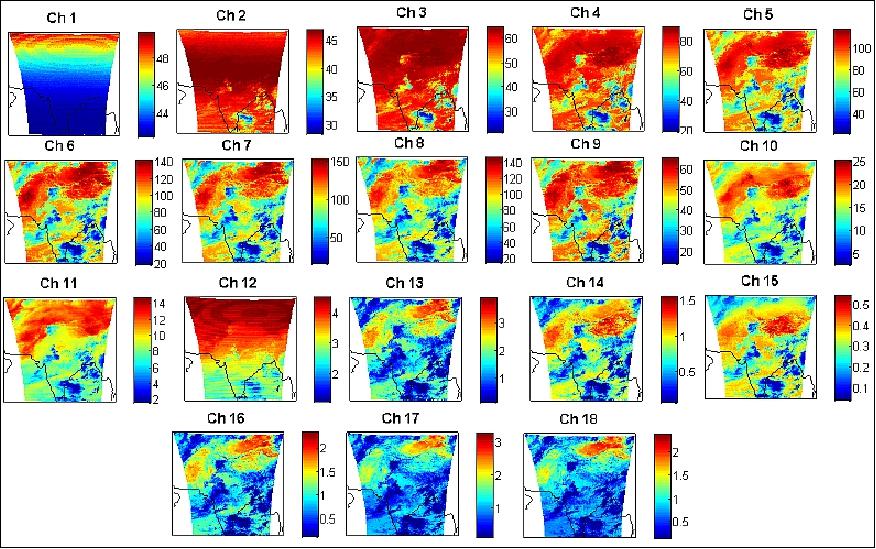
Sounder
The Sounder is a first time radiometer instrument of the geostationary INSAT series designed and developed at ISRO. The overall objective is to measure the temperature and humidity profiles (vertical distributions) to obtain a three-dimensional representation of the atmosphere. The instrument requirements call for soundings at 10 km ground resolution every 3 hours for a full frame scan. This enables the derivation of vertical profiles of temperature and humidity. These vertical profiles can then be used to derive various atmospheric stability indices and other parameters such as atmospheric water vapor content and total column ozone amount (Ref. 2).
The main characteristics of the instrument are presented in Tables 4 and 5.
Telescope aperture | 310 mm diameter |
Number of bands | 18 Infrared + 1 Visible |
Band definition | Filter wheel with interference filters |
IFOV (Instantaneous Field of View) | 280 µrad x 280 rad, corresponding to 10 km x 10 km on the surface |
Sampling interval | 280 µrad E-W / N-S |
No of simultaneous soundings | 4 per band |
Scan step angle | 10 km E-W, every 0.1 s, and 40 km N-S after completion of E-W scan, 150 µrad rms |
Step and dwell time | 0.1, 0.2 and 0.4 s |
Turnaround time | 0.1 s per scan |
In-flight calibration | Full aperture blackbody and space view |
Scan modes | - Program mode: Any sector in 24º x 19º FOR by gradual stepping both in fast scan and slow scan axis - Options provided to cater to quick dynamic environmental phenomena |
Frame time | 160 minutes for 6000 km x 6000 km area sounding |
Signal quantization | 13 bit/sample |
Downlink data rate | 40 kbit/s |
Instrument mass, power | 90 kg, (without cooler), 100 W |
Band No | Center wavelength µm (cm-1) | Bandwidth µm (cm-1) | NEDT at 300 K (typical) K | Principal absorbing constituents |
1 | 14.71 (680) | 0.281 (13) | 1.5 | CO2 band |
2 | 14.37 (696) | 0.268 (13) | 1 | CO2 band |
3 | 14.06 (711) | 0.256 (13) | 0.5 | CO2 band |
4 | 13.96 (733) | 0.298 (16) | 0.5 | CO2 band |
5 | 13.37 (749) | 0.286 (16) | 0.5 | CO2 band |
6 | 12.66 (790) | 0.481 (30) | 0.3 | Water vapor |
7 | 12.02 (832) | 0.723 (50) | 0.15 | Water vapor |
8 | 11.03 (907) | 0.608 (50) | 0.15 | window |
9 | 9.71 (1030) | 0.235 (25) | 0.2 | ozone |
10 | 7.43 (1425) | 0.304 (55) | 0.2 | Water vapor |
11 | 7.02 (1425) | 0.394 (80) | 0.2 | Water vapor |
12 | 6.51 (1535) | 0.255 (60) | 0.2 | Water vapor |
13 | 4.57 (2188) | 0.048 (23) | 0.2 | N2O |
14 | 4.52 (2210) | 0.047 (23) | 0.15 | N2O |
15 | 4.45 (2245) | 0.045 (23) | 0.15 | CO2 |
16 | 4.13 (2420) | 0.0683 (40) | 0.15 | CO2 |
17 | 3.98 (2513) | 0.0683 (40) | 0.15 | window |
18 | 3.74 (2671) | 0.140 (100) | 0.15 | window |
19 | 0.695 (14367) 0.05 |
| 0.1% albedo | VIS |
The Sounder measures radiance in eighteen IR and one visible channel simultaneously over an area of area of 10 km x 40 km at nadir every 100 ms. Using a two-axes gimballed scan mirror, this footprint can be positioned anywhere in the FOR. A scan program mode allows sequential sounding of a selected area with periodic space and calibration looks. In this mode, a ‘frame' consisting of multiple ‘blocks' of the size 640 km x 640 km, can be sounded. The selected frame can be placed anywhere within a 24º (E-W) x 19º (N-S) FOR. It takes almost three hours to sound an area of 6400 km x 6400 km in size. As with the Imager, the Sounder provides an adequate radiometric resolution for the intended science applications.
Infrared radiometric fidelity is maintained by timed interval views of the space for reference (approximately every 120 s). And the full-aperture internal blackbody (at 30 minutes interval or whenever commanded) location of the space view (east or west) is ground command selectable. The blackbody view establishes a high-temperature baseline for in orbit calibration for IR channels. Also during space views, an electrical calibration (E-cal) signal, consisting of a sixteen step staircase, is injected every time. Eventually, this staircase signal covers the full dynamic range of the video processors. The E-cal signal helps in checking the stability of the amplifiers and of the data stream.
Instrument operation: The scan mirror motion, synchronized with the filter wheel, determines the sounding operation. At a particular mirror position, the filter wheel rotates and sequentially brings all 18 IR spectral filters into the optical paths of the three bands. This activity takes around 80 ms, after which, the filter-less ( blank region) of the wheel starts. During this period of about 20 ms, the scan mirror steps to the next location in East-West direction and settles before the start of occurrence of the first filter in the optical path. This time is also used for the DC restoration of the IR detector output. Thus, the total time for one filter-wheel revolution is 100 ms (600 rpm). It is possible to carry out multiple (up to four) measurements before the scan mirror steps to a new location. The VIS channel is sampled independently of the filter-wheel position.
The operation of the Sounder is controlled by ground commands in terms of configuration, gain, sounding area location and other such parameters. The sounding area is defined in terms of east –west and north –south ‘blocks'. A step in the east-west direction is 10 km and such 64 steps make a block in the east-west direction. - Similarly, each step into the north-south direction is of 40 km, and 16 steps make a block in the north-south direction.
The number of blocks can be independently selected in both directions. For example, 1 block in E-W and 1 block in N-S direction will scan 640 km x 640 km on the ground at the subsatellite location. Depending upon the scan offset selection: the maximum number of blocks in each direction can be 15. The dwell time for each sounding can be selected from 100 ms to 400 ms in steps of 100 ms. The sounding is bi-directional in the East-West direction. After every 1216 filter wheel revolutions, the mirror slews into the east-west direction to a location 9º away from nadir for a space look. The direction of this slewing (East or West) is ground command selectable so as to optimize the sounding time and to avoid any sun-moon intrusion. After the commanded ‘N' steps into the E-W direction are traversed, the scan mirror steps to South by 1120 µrad and starts scanning in the reverse direction. The south stepping takes 200 ms including the stabilization time. The sounding operation described so far is periodically (every 30 minutes), interrupted for views of the internal blackbody. The blackbody view sequence is similar to that for the Imager.
The signals from the detectors are processed and readout in synchronization with the filter wheel rotation. Thus, the data format for the Sounder, which includes the sounding data as well as other auxiliary information, repeats every 100 ms.
Sounder instrument: Like the Imager, the Sounder consists of an EO (Electro-Optics) module and a set of electronics packages including power supply modules. A simplified block schematic of the instrument is shown in Figure 18. The EO module, containing the telescope, scan assembly, filter wheel and its cooler and detectors along with their cooler, is mounted external to the spacecraft.
The electronics packages that provide circuitry for the signal processing functions, scan mirror control, power supply and other auxiliary functions, are mounted on an internal panel of the spacecraft. The Sounder instrument has a total mass of ~145 kg.
EO module. The basic structure of the EO module is similar to that of the Imager except for the filter-wheel and associated cooler. It consists of a scan mechanism assembly, telescope, aft optics, filter-wheel assembly with its cooler, a cooler assembly with the cooled detectors, the detectors for the uncooled channels, preamplifiers, and a viewport sunshade. An exploded view of Sounder EO module is shown in Figure 19.
Bidirectional scanning in the fast-scan direction is employed as in the Imager. That is, after the completion of the scan in the East-West direction, the mirror moves south by 1120 µrad and starts scanning in the reverse direction. The scanning is synchronized with the filter wheel rotation in the sense that the mirror stepping in the east-west direction always occurs during the blank portion of the wheel. The mirror moves one step (280 µrad, 10 km) into the E-W direction after every one, two, three or four revolutions of the wheel as selected by ground command. The time taken for N-S stepping is also an integer multiple of the filter wheel rotational period (200 ms). As mentioned earlier, the sounding is periodically interrupted for space and blackbody views. The drive pattern for the blackbody calibration and space look consists of slewing the mirror at a rate of 10º/s to the set coordinates and bringing it back to the same position after the operation is completed. The positional repeatability (E-W/N-S) of better than 5arcsec is ensured in all operations.
Optics subsystem: The optical scheme for the Sounder is shown in Figure 20. The telescope for the Sounder is identical to that of the Imager. Dichroic beam splitters separate the scene radiance into various spectral ranges of interest. There are a total of three dichroic beam-splitters in the instrument. The first one, placed behind the primary mirror, separates the VIS channel from the IR channels. The VIS beam is transmitted through the dichroic and after subsequent folding, is measured by the VIS detector array. The reflected IR radiation is collimated after passing through a collimating lens. A set of two dichroic systems and a fold mirror separate the LWIR, SWIR and MWIR bands, in that order. These beams, corresponding to the three bands, are passed through the filter wheel assembly, which defines the channels in each band.
The filter wheel has 18 filter windows distributed into three concentric rings, one each for the LWIR (7 channels), the SWIR (6 channels) and the MWIR (5 channels). The filter lengths and inter filter gaps are optimized to get the best possible performance of all channels with this size of the wheel. Nearly 20% of the wheel area is kept blank, i.e. without any filters. When this portion blocks the optical path, the scan mirror stepping takes place. Thus, the mirror is held stationary during sounding. The filter wheel rotates at a uniform speed of 600 rpm, completing one revolution in 100 ms.
The filters on the wheel function as the spectral defining elements for each of the 18 IR channels. Since the filter wheel is placed away from the detectors in the cooler, its temperature has major a effect on the radiometric stability and background radiation. To minimize these effects, the wheel is cooled to 213K using a separate cooler. The temperature of the wheel casing is controlled with a stability of ±1 K.
The 19 channels of the Sounder are acquired by use of four distinct detector head assemblies. Each detector assembly consists of an array of four detector elements arranged in N-S direction. Each detector element is of the size 10 km x 10 km on the ground (280 µrad IGFOV) at Nadir. Thus, each detector head assembly provides a footprint of 10 km x 40 km.
The detector for the VIS channel is very similar to that of the Imager, except that the element size is larger commensurate with the IGFOV, and each array contains only four detectors instead of eight for the Imager. This is the only channel with redundancy for the detector and the signal processor.
The 3 detector assemblies catering to the LWIR, MWIR and SWIR channels, sense the 18 IR channels. Each detector assembly has four detector elements. The LWIR and MWIR detectors are HgCdTe detectors operated in PC mode while for SWIR, InSb detectors are operated in PV mode. The first stage of the preamplifier is integrated within the SWIR detector package, similar to the MWIR detector package for the Imager These detectors are mounted in a passive cooler similar to the one used in the Imager and operated at a nominal temperature of 95 K with a stability of better than ±0.25 K (Ref. 2).
DRT (Data Relay Transponder)
The DRT receives globally metrological, hydrological and oceanographic data from automatic DCPs (Data Collection Platforms) in the ground segment and relays back to downlink in extended C -band.
For extreme weather related disasters such as a cyclone, floods and drought, real time observations of the associated parameters with appropriate network density is very important. Satellite enabled DCPs provide a unique solution for gathering meteorological data from all over the country including remote and inaccessible places. The IMD (India Meteorological Department) and ISRO have established more than 1800 DCPs.
SAS&R (Satellite Aided Search & Rescue)
The SAS&R payload operates at 406 MHz. The objective of SAS&R is to relay a distress signal / alert detection from the beacon transmitters for search and rescue purposes with global receive coverage in UHF band. The downlink operates in extended C-band. The data are transmitted to INMCC (Indian Mission Control Center), located at ISTRAC (ISRO Telemetry, Tracking and Command Network), Bangalore.
References
1) Devendra Singh, "Status Report on current and future Geostationary Indian Satellites," URL: http://cimss.ssec.wisc.edu/itwg/itsc/itsc14/presentations/session9/9_3_singh.pdf
2) V. R. Katti, V. R. Pratap, R. K. Dave, K. N. Mankad, "INSAT-3D: an advanced meteorological mission over Indian Ocean," Proceedings of SPIE, 'GEOSS and Next-Generation Sensors and Missions,' Stephen A. Mango; Ranganath R. Navalgund; Yoshifumi Yasuoka, Editors, Vol. 6407, Goa, India, Nov. 13, 2006, DOI: 10.1117/12.697880
3) R. R. Kelkar, "Indias INSAT-3D Satellite Mission," April 2008, URL: https://web.archive.org/web/20240530162658/http://www.earthscienceindia.info/popular%20archival/download.php?file=pdf-1.pdf
4) A. K. Sharma, "Implementing arrangement regarding INSAT-3D Satellite Data," Sept. 11, 2008, URL: [web source no longer available]
5) "Implementing Arrangement Regarding INSAT-3D Satellite Data (IA-3D)," URL: http://www.star.nesdis.noaa.gov/star/documents/news/2010India/IA-3Dsignedversion.pdf
6) INSAT-3D India's Advanced Weather Satellite," ISRO brochure, URL:[web source no longer available]
7) Ajey Lele, "INSAT-3D and India's new emphasis on meteorology," The Space Review, August 5, 2013, URL: http://www.thespacereview.com/article/2341/1
8) http://www.sac.gov.in/SACSITE/oct10/insat.pdf
9) http://www.sac.gov.in/SACSITE/INSAT-3D.html
10) "INSAT-3D -observing weather from space - Products Catalog," NSMC/IMD (National Satellite Meteorological Centre/India Meteorological Department), URL: http://www.imd.gov.in/section/satmet/dynamic/INSAT3D_Catalog.pdf
11) "INSAT-3D is delivered to French Guiana for Arianespace's next Ariane 5 launch," Arianespace, June 13, 2013, URL: http://www.arianespace.com/news-mission-update/2013/1055.asp
12) Patrick Blau "Ariane 5 delivers heavy Prototype Alphasat & light INSAT-3D to Orbit," Spaceflight 101, July 25, 2013, URL: http://www.spaceflight101.com/ariane-5-va-214-launch-updates.html
13) "India's Advanced Weather Satellite INSAT-3D Successfully Launched," ISRO Press Release, July 26, 2013, URL: [web source no longer available]
14) "Arianespace's heavy-lift Ariane 5 mission orbits key satellite payloads for Europe and India," Arianespace, July 25, 2013, URL: http://www.arianespace.com/news-mission-update/2013/1075.asp
15) "Weather satellite INSAT-3D launched successfully," The Hindu, Bangalore, July 26, 2013, URL: https://web.archive.org/web/20140106125822/http://www.thehindu.com:80/news/national/weather-satellite-insat3d-launched-successfully/article4954410.ece
16) Vinay Kumar Dadhwal, "Indian Earth Observations & Space Science Missions : Status 2013," 56th Session of UNCOPUOS (UN Committee on the Peaceful Uses of Outer Space), Vienna, Austria, June 12-21, 2013, URL: http://www.oosa.unvienna.org/pdf/pres/copuos2013/tech-14.pdf
17) "INSAT-3D, Advanced Weather Satellite, Completes Two Years in the Orbit," ISRO, July 27, URL: http://www.isro.gov.in/insat-3d/insat-3d-advanced-weather-satellite-completes-two-years-orbit
18) "CEOS EO Handbook-Agency Summary - ISRO," Updated for 2015, URL: http://database.eohandbook.com/database/agencysummary.aspx?agencyID=11
19) Report of the 42 nd Meeting of the Coordination Group for Meteorological Satellites (CGMS-42), Guangzhou, China, 19-23 May 2014, URL: http://www.cgms-info.org/documents/CGMSMR42_00_FullReport.pdf
20) "INSAT-3D now operational," WMO, Feb. 5, 2014, URL: http://www.wmo-sat.info/vlab/2014/02
/insat-3d-now-operational/
21) http://www.imd.gov.in/section/satmet/dynamic/insat_3d.htm
22) "Initial Products of INSAT-3D," ISRO, URL: [web source no longer available]
23) "Initial Products of Sounder," ISRO, URL: https://web.archive.org/web/20130919023153/www.isro.org/pdf/insat-3d-sounder.pdf
24) "INSAT-3D satellite successfully placed in Geosynchronous Orbit," ISRO Press Release, Aug. 1, 2013, URL: https://web.archive.org/web/20140709122459/www.isro.org/pressrelease/scripts/pressreleasein.aspx?Aug01_2013
25) M. R. Pandya, D. B. Shah, H. J. Trivedi, S. Panigrahy, "Simulation of at-sensor radiance over land for proposed thermal channels of Imager payload onboard INSAT-3D satellite using MODTRAN model," Journal of Earth System Science, Vol. 120, No 1, Feb. 2011, Indian Academy of Sciences, pp. 10-25, URL: http://www.ias.ac.in/jess/feb2011/19.pdf
26) Madhu Prasad, Basavaraj S. Akkimaradi, Santram, T. Selvan, Subramanya, S. C. Rastogi, K. Badrinarayana, D. R. Bhandari, M. Sugumar, B. Mallesh, K. S. Rajam, Indira Rajgopalan, V. K. W. Grips, J. N. Balaraju, A. K. Saxena, R. Ismail Jabilullah, M. Viswanathan,Ganesh Shanbhog, "Development of Sunshield Panels for Passive Radiant Cooler On Board Meteorological Instruments of ISRO," RASE 2009, URL: http://prints.iiap.res.in/bitstream/2248/4963/4/Development%20of%20sunshield%20panels%20for%20passive...
27) "Optical Polishing for Development of Highly Specular Sunshield for Radiant Coolers of Meteorological Satellites of ISRO," ISRO-ISAC-TR-0908, Issue No. A, Date: 22-01-2010, URL: http://prints.iiap.res.in/bitstream/2248/5012/1/Optical%20polishing%20for%20development%20of%20highly...
28) Space.com, “India launches powerful new weather satellite INSAT-3DS into orbit on 'naughty boy' rocket”, February 17, 2024, URL: https://www.space.com/india-insat-3ds-weather-satellite-launch
29) ISRO, “GSLV-F14/INSAT-3DS MISSION”, February 8, 2024, URL: https://www.isro.gov.in/GSLV-F14_INSAT-3DS_mission.html
30) Every Day Astronaut, “INSAT-3DS | GSLV Mk II” , February 15, 2024, URL: https://everydayastronaut.com/insat-3ds-gslv-mk-ii/
Overview Spacecraft Launch Mission Status Sensor Complement References Back to top