ISS: MUSES (Multi-User System for Earth Sensing)
EO
Imaging multi-spectral radiometers (vis/IR)
Land
Multi-purpose imagery (land)
Quick facts
Overview
| Mission type | EO |
| Agency | DLR |
| Mission status | Operational (nominal) |
| Launch date | 29 Jun 2018 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land) |
| Measurement detailed | Land surface imagery |
| Instruments | DESIS |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See ISS: MUSES (Multi-User System for Earth Sensing) summary |
ISS Utilization: MUSES-DESIS (Multi-User System for Earth Sensing) with DESIS instrument
MUSES Platform DESIS Launch Status of DESIS instrument Processing chain and products
References
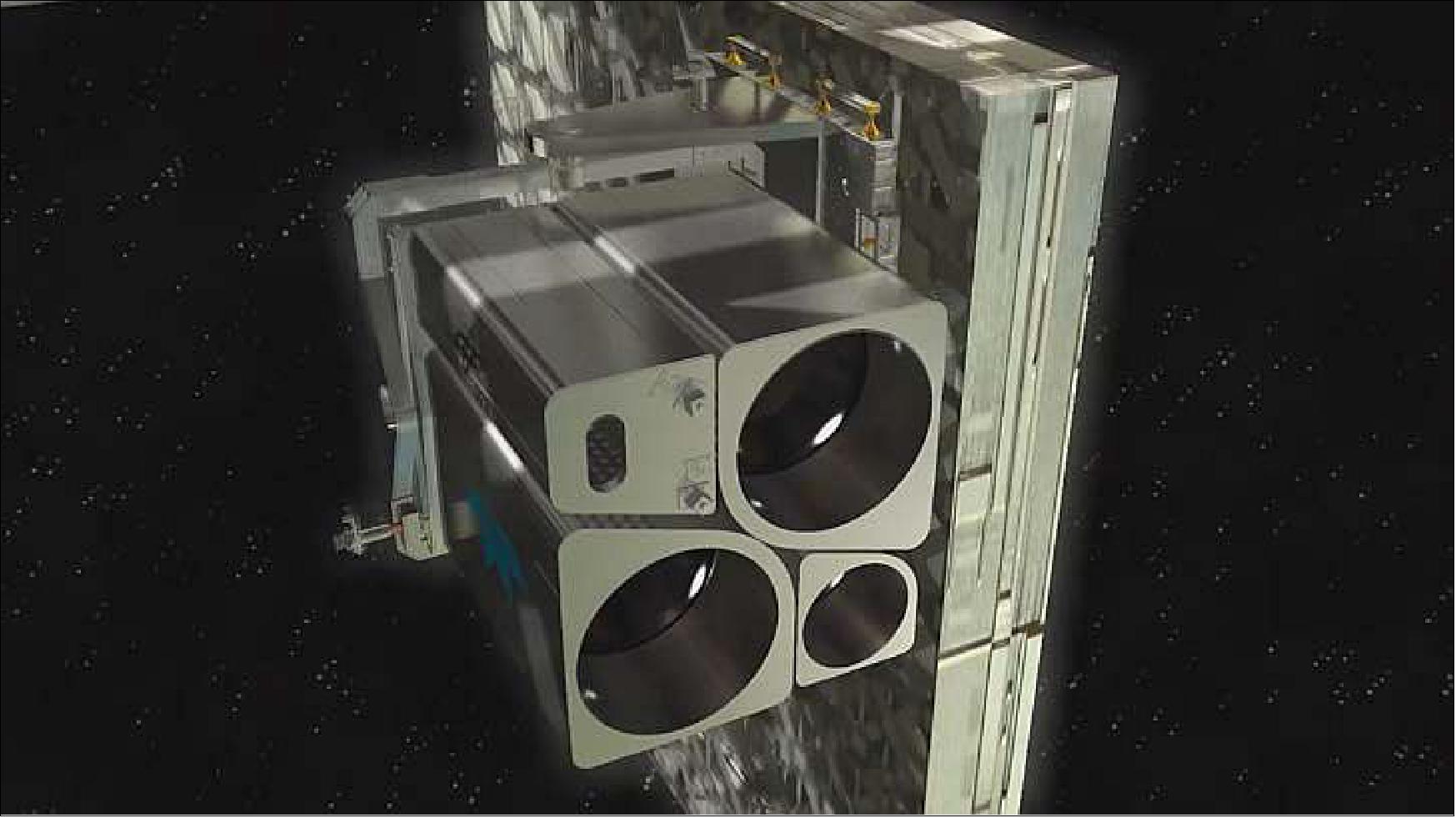
Teledyne Brown Engineering of Huntsville AL, USA, is developing MUSES (Multiple User System for Earth Sensing), an Earth imaging platform, as part of the company’s new commercial space-based digital imaging business. MUSES hosts earth-viewing instruments (Hosted Payloads), such as high-resolution digital cameras, hyperspectral imagers, and provides precision pointing and other accommodations. It hosts up to four instruments at the same time, and offers the ability to change, upgrade, and robotically service those instruments.
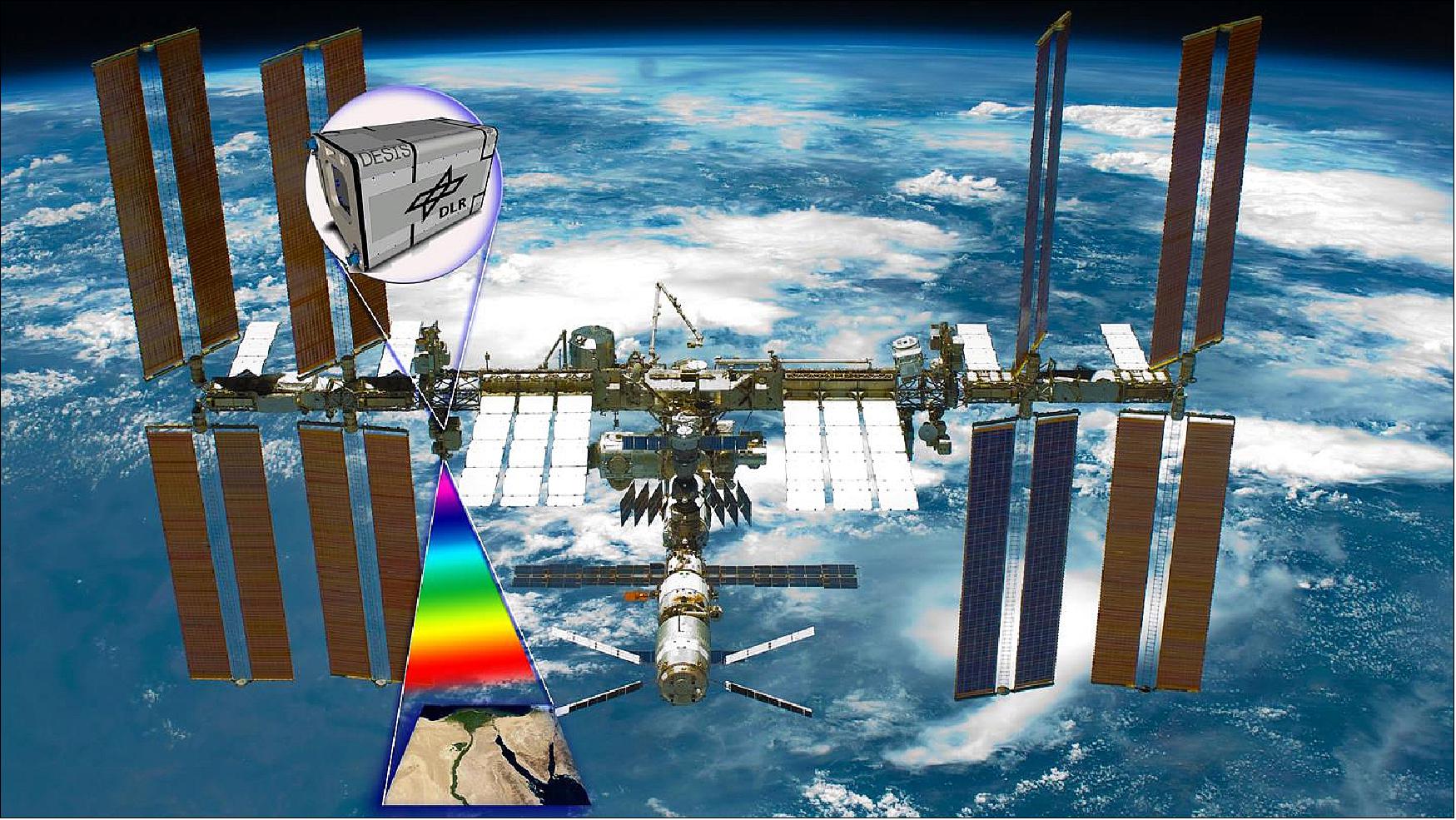
MUSES, a commercial Earth-sensing platform on the ISS, will further increase the Space Station's research capabilities. MUSES is is a precision-pointing platform that will mount externally to the ISS. The instruments installed on the platform – including high-resolution digital cameras – are oriented towards Earth. The platform can host up to four Earth observation instruments and offers the ability to change, upgrade, and robotically service those instruments.
On 1 October 2013, Teledyne Brown Engineering, Inc. (TBE), a subsidiary of Teledyne Technologies Inc., Thousand Oaks, CA, and DLR (German Aerospace Center — Deutsches Zentrum für Luft- und Raumfahrt) signed a memorandum of agreement to develop an instrument for MUSES (Multi-User System for Earth Sensing), which will be mounted on the ISS (International Space Station). 1)
On May 20, 2014 at the ILA Berlin Air Show, DLR and the US corporation TBE (Teledyne Brown Engineering, Inc.) signed an agreement to install and operate the imaging spectrometer, DESIS (DLR Earth Sensing Imaging Spectrometer) on board the ISS. This DLR-built instrument will be one of four camera systems for remote sensing fitted to the MUSES (Multi-User System for Earth Sensing) instrument carrier to be installed by TBE on the ISS. DESIS will be able to detect changes in the land surface, oceans and atmosphere; it will contribute to the development of effective measures to protect the environment and climate. 2) 3)
On July 20, 2015, TBE had entered in an agreement with NASA for the provision of hyperspectral remote-sensing imagery from an instrument to be based on the International Space Station (ISS). 4) 5)
Under the agreement, DLR will build the DESIS (DLR Earth Sensing Imaging Spectrometer), a hyperspectral instrument which Teledyne will integrate onto its ISS imaging platform, the MUSES (Multi-User System for Earth Sensing). Teledyne is planning to operate the instrument and retrieve remote sensing data which the company will use for commercial applications and DLR will apply the data to scientific research in atmospheric physics and Earth sciences.
Development status: 6)
• The DESIS instrument was launched on 29 June 2018 as part of the SpaceX CRS-15 logistics flight to the ISS (Ref. 30).
• On June 27-29, 2016, CDR (Critical Design Review) in Berlin.
MUSES Platform
MUSES itself is not a sensing instrument; it is a platform for pointing a range of instruments that could include spectrometers, multi and hyperspectral imagers, high resolution panchromatic imagers, lidar, radar, magnetic sensors and more. The platform can host four instruments simultaneously and offers the ability to change, upgrade, and robotically service each individually. One of the first instruments will be DESIS, a VNIR (Visible/Near-Infrared) imaging spectrometer built by the DLR (German Aerospace Center) to gather information on atmospheric physics and Earth sciences. Ironically, the instrument will itself become an object of study—DLR scientists will investigate the influence of the space environment on remote sensing instruments once DESIS is returned to Earth at the end of its mission. The fact that it can be returned to Earth after its mission emphasizes once again some of the ISS’s unique advantages. 7) 8) 9) 10)
MUSES will be the first commercial Earth-sensing platform on the ISS—commercial in the sense that it will be designed, built, operated and managed by a commercial entity TBE (Teledyne Brown Engineering), and research institutions and private sector companies outside NASA will have the opportunity to mount their instruments on the platform, specify where they would like to look and own rights to the data gathered.
The MUSES platform provides accommodations for two large and two small hosted payloads (Figure 2). MUSES is attached at the EXPRESS Logistics Carriers (ELC-4) starboard of the ISS. It is a space-based, Earth-pointing platform providing position sensing, data downlink, and other core services for each payload attitude control. 11)
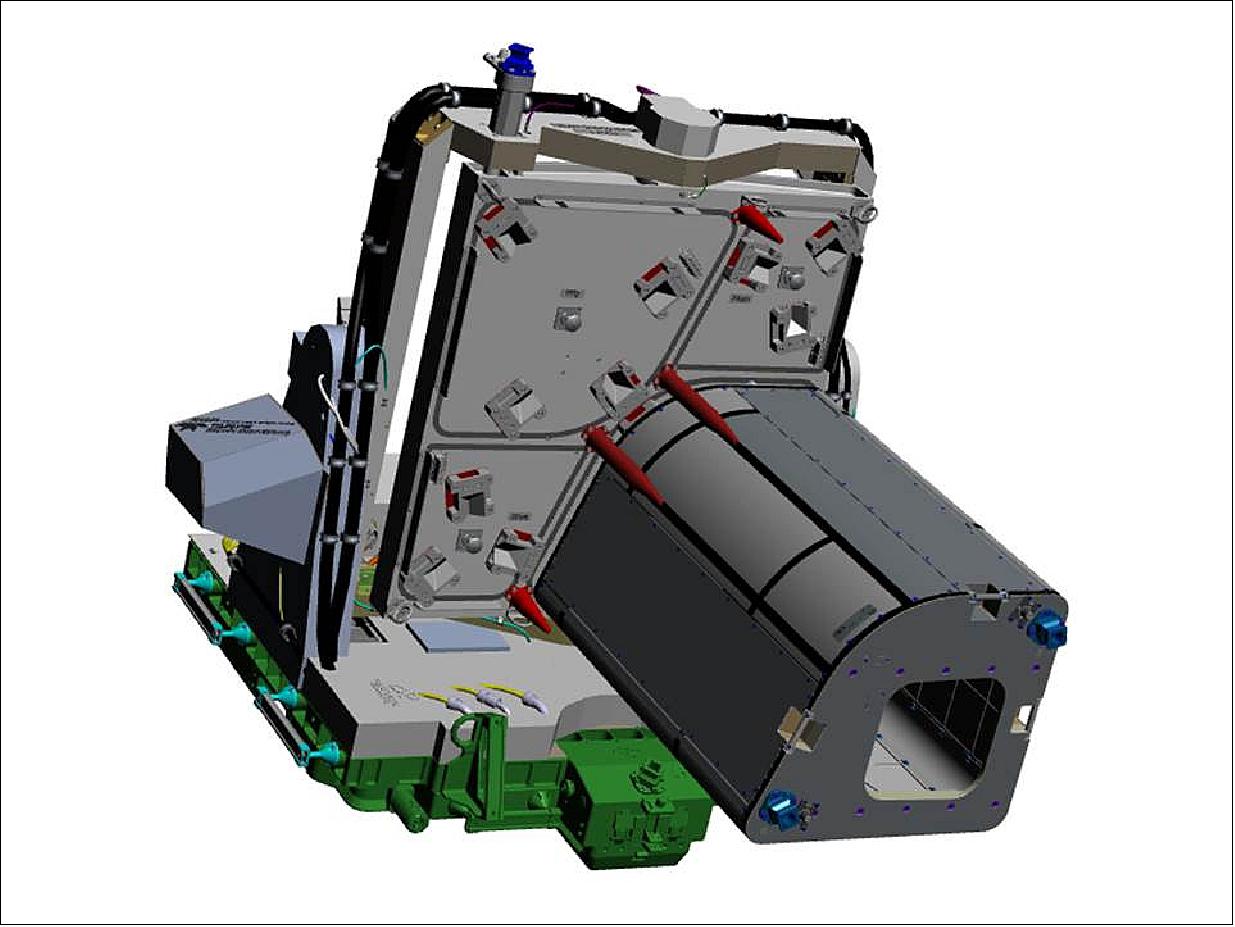
DESIS is one of the hosted instruments on the MUSES platform, it has a mass of ~88 kg and is integrated in one of the large containers.
MUSES is equipped with two gimbals, thus allowing rotations around two axes up to ±25° forward-backward, 45° backboard view and a 5° starboard view. The pointing accuracy is better than 30 arcseconds, which corresponds to about 60 m on ground at 400 km altitude. Together with the POI (Pointing Unit) of the DESIS instrument, a ±40º along track viewing is possible. The MUSES platform is also equipped with a star tracker and a miniature inertial measurement unit providing attitude measurement.
The MUSES platform is equipped with a star tracker (sampling rate 10 Hz) and a miniature IMU (Inertial Measurement Unit ) with a sampling rate 50 Hz providing a 10 Hz attitude measurement after filtering. ISS GPS data provide position and velocity vectors and time tags (sampling rate 1 Hz) serving as a master time for the MUSES instruments with an accuracy of ±250 µs. The predicted viewing capability of MUSES, when operating at the ISS orbit inclination of 51.6°, will enable the DESIS instrument to scan about 90% of the populated Earth with a 3-5 day average cadence. The daily download capacity is 225 GB.
MUSES will be the first commercial instrument platform on the ISS. The MUSES platform has a size of 85 cm x 85 cm and can accommodate four instruments. It will be attached to a pivot arm on the side of the ISS facing Earth during an astronaut spacewalk.
MUSES Facility Operations
TBE will operate the DESIS hyperspectral sensor on the ISS and will cooperate with DLR in using the data in various areas, for instance systematic and applied research. Nominal MUSES commanding is accomplished from the TBE TSC (Telescience Support Center) in Huntsville, Alabama. A nominal weekly file upload window is planned to allow regular scheduled updates to be in sync with POIF (Payload Operations and Integration Function) normal upload cycles. Any commands considered “critical” are issued from the POIF, which manages all commands classified as “critical”.
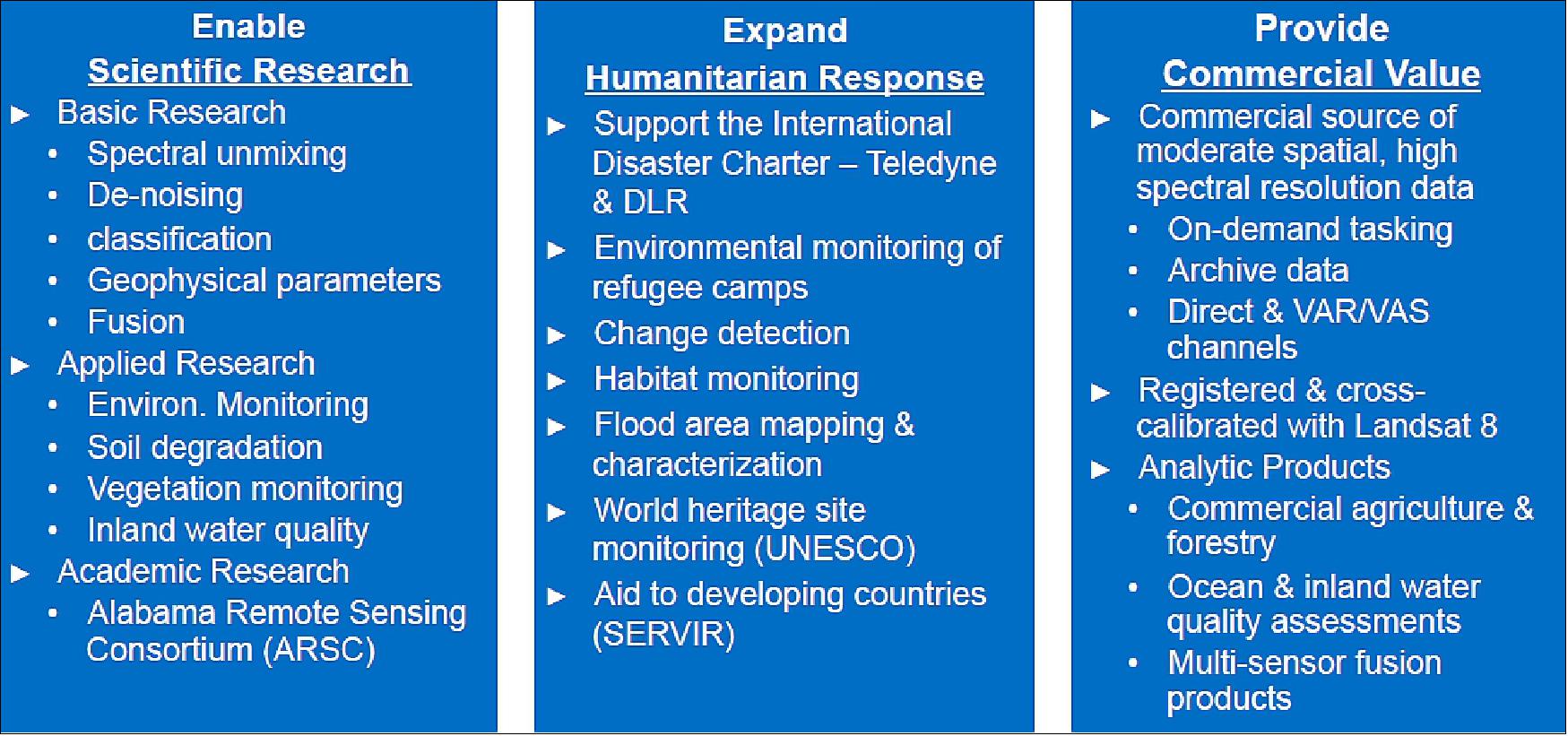
The end-user data products of MUSES can be used for: Maritime Domain Awareness, Agricultural Awareness, Food Security, Disaster Response, Air Quality, Oil/Gas Exploration, and Heritage Preservation.

Launch: MUSES was launched to the ISS on June 3, 2017 on the SpaceX CRS-11 Falcon-9 vehicle as part of a Dragon capsule cargo resupply mission from Launch Complex LC-39A, Cape Canaveral, Florida. The external payloads manifested for this flight are NICER (Neutron star Interior Composition ExploreR), MUSES (Multi-User System for Earth Sensing) and ROSA (Roll-Out Solar Array). 13) 14)
Orbit: Near circular orbit, altitude of ~ 400 km, inclination = 51.6º.
MUSES Platform Status
• August 20, 2018: The Center for the Advancement of Science in Space (CASIS) and Teledyne Brown Engineering (TBE) today announced a sponsored program up to $4.5 million, offering researchers the ability to propose flight project concepts for the International Space Station (ISS) focused on remote sensing and Earth observation. Within this opportunity, up to $1 million will be available for researchers to support sensor development. Prospective awardees will utilize the Multi-User System for Earth Sensing (MUSES) platform, developed and managed by TBE. This funding opportunity will run through December 7, 2018. 15)
- Through this partnership, CASIS and NASA intend to facilitate in-orbit access to the U.S. National Laboratory on the space station. CASIS is the nonprofit organization responsible for managing and promoting research onboard the ISS National Laboratory.
- TBE developed the MUSES platform, to host Earth-viewing instruments such as high-resolution digital cameras and hyperspectral imagers and provide precision pointing and other accommodations. MUSES can simultaneously host up to four instruments and offers the ability to change, upgrade, and robotically service those instruments. It also provides a testbed for technology demonstration and technology maturation by providing long-term access to the space environment on the space station.
- Through this funding opportunity, CASIS and TBE seek proposals that wish to leverage the MUSES platform for applications such as (but not limited to) maritime domain awareness, precision agriculture, food security, disaster response, air quality, oil/gas exploration, and fire detection.
- The ISS provides researchers a unique vantage point of the Earth, orbiting at approximately 400 km above the planet’s surface. Additionally, at an orbital inclination of 51.6º and an orbital track recycle time of three days, it provides researchers the ability to evaluate up to 95% of the Earth’s habitable population on a daily basis.
• October 3, 2017: Teledyne Technologies Incorporated announced that TBE's (Teledyne Brown Engineering) MUSES (Multi-User System for Earth Sensing) aboard the ISS (International Space Station) has achieved full operating capability (FOC). 16)
• June 13, 2017: Astronauts installed and completed a successful initial operational assessment of MUSES on the ISS. 17) 18)

DESIS (DLR Earth Sensing Imaging Spectrometer)
DESIS is a hyperspectral camera that records image data using an array of up to 235 closely spaced channels, covering the visible and near infrared portions of the spectrum (450 - 1000 nm) with a ground resolution of 30 m. This multifaceted information allows scientists to detect changes in ecosystems and to make statements on the condition of forests and agricultural land. Among other things, its purpose is to secure and improve the global cultivation of food. The data from the ISS instruments will be available quickly in the event of a catastrophe and can help rescue teams operating on the ground to org anise their deployment. DLR and TBE seek to combine the data from other MUSES instruments to develop advanced methods for remote sensing of the Earth. Cooperation in this scientific and commercial use will also promote hyperspectral technologies for future satellites. 19) 20)
Installation on the ISS will also mean that the instruments can be brought back to Earth after a service life of between three and five years to analyze the influence of the space environment on the remote sensing instruments. The platform with the DLR DESIS instrument is scheduled to be mounted on the ISS by mid of 2017 and will, after a four month commissioning phase, enter its operational phase at least until 2020.
DESIS was developed by DLR in a partnership with La Trobe University in Melbourne, Australia. 21) 22) 23)
Teledyne owns the platform, determines pointing schedules, and retains data rights in cooperation with partners. Teledyne and DLR have partnered to build, integrate, & operate the DLR Earth Sensing Imaging Spectrometer (DESIS) from the Teledyne-owned MUSES Platform on the ISS (Ref. 6).
DESIS Instrument 24) 25) 26) 27) 28)
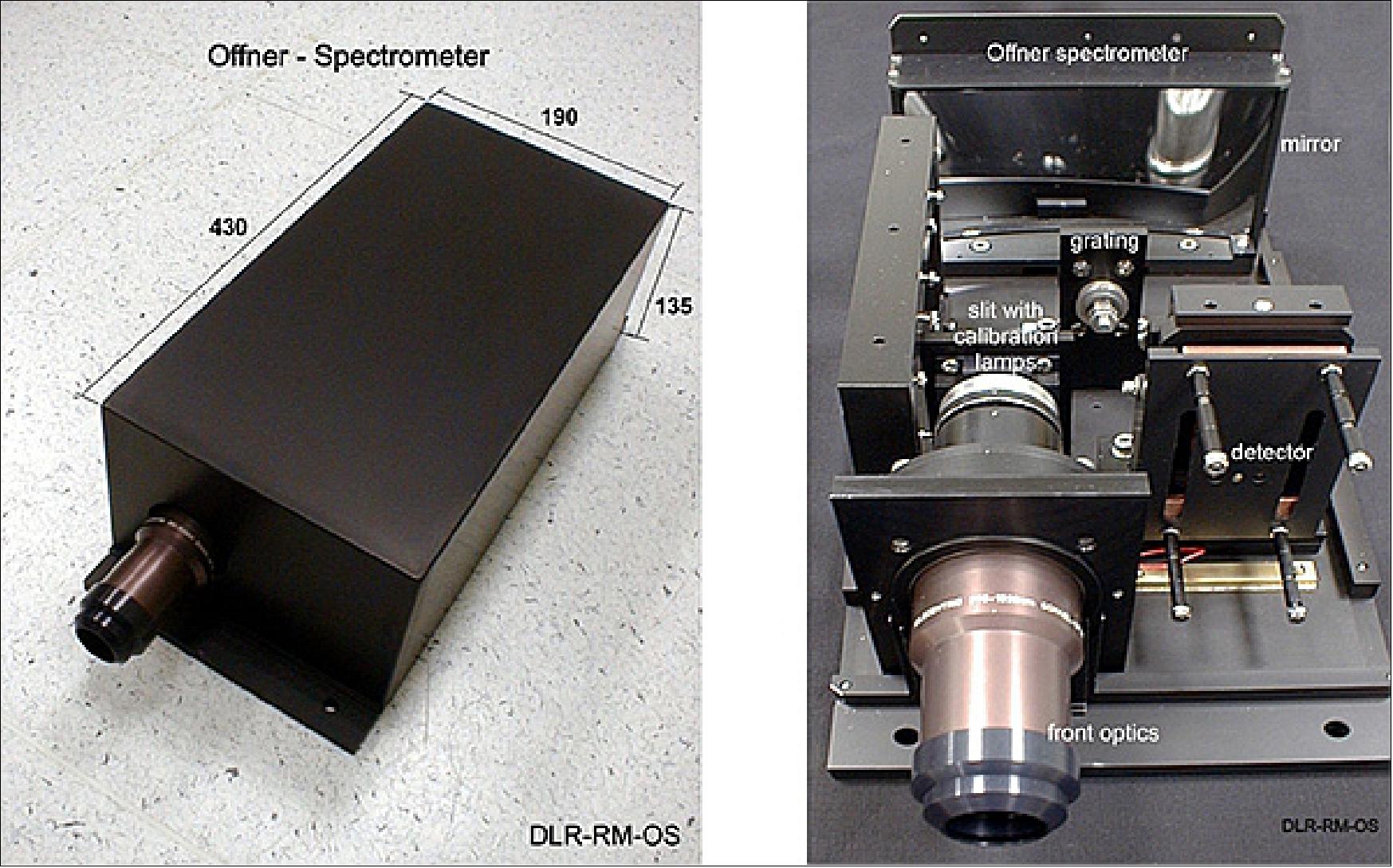
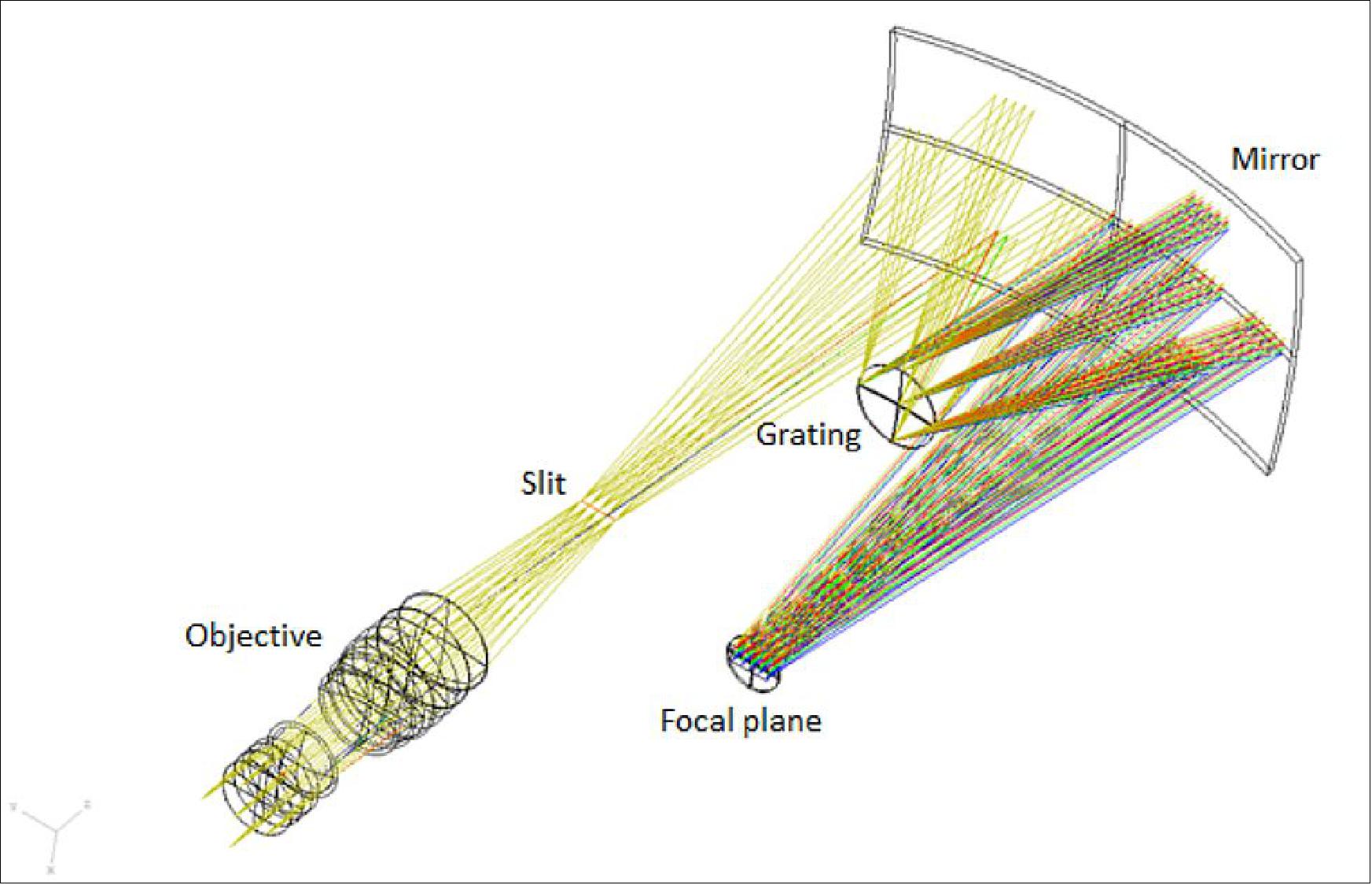
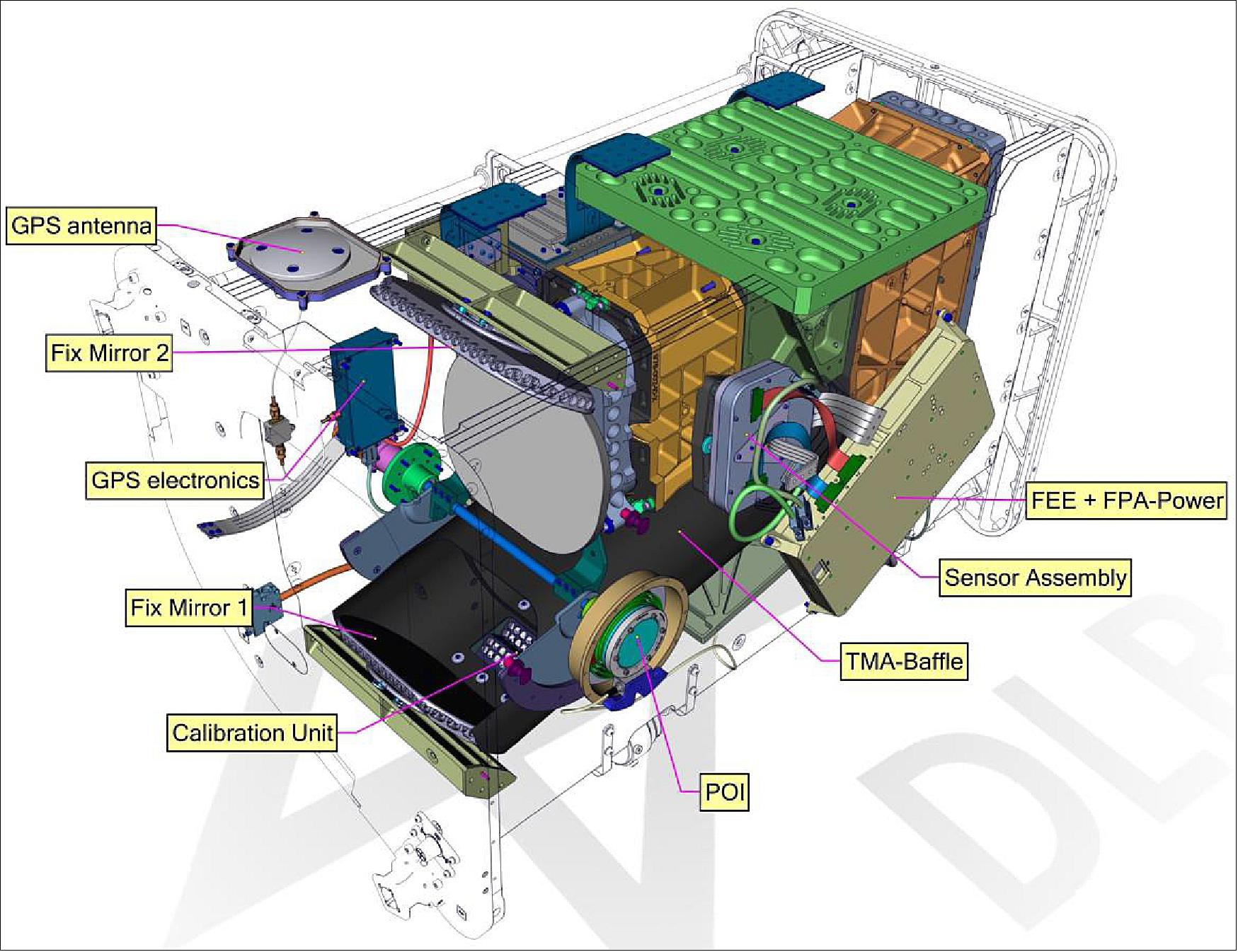
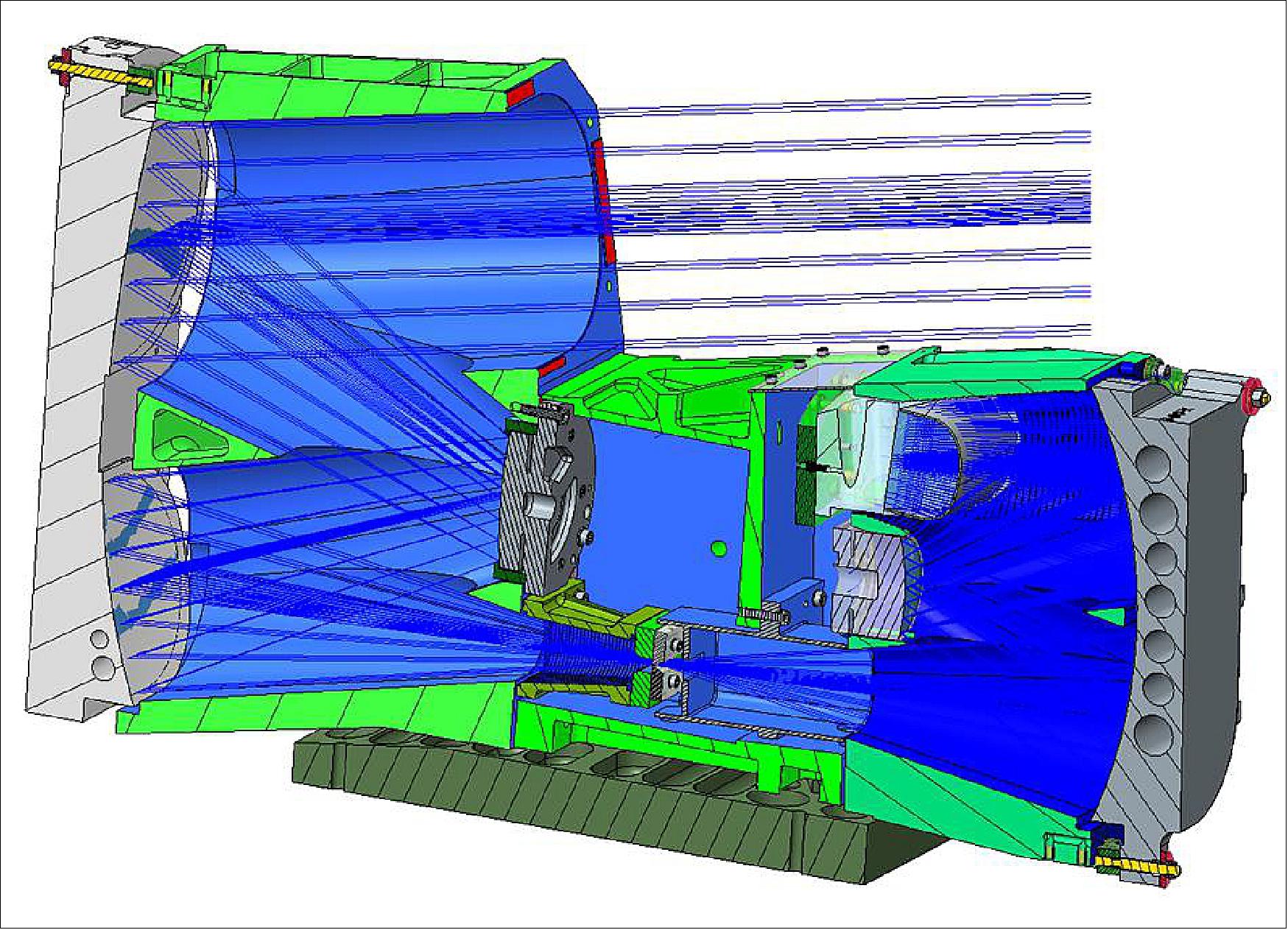
DESIS is a hyperspectral instrument is a pushbroom imaging spectrometer in a spectral range of 400 nm up to 1000 nm (VNIR) and based on a modified Offner design for the spectrometer. The telescope is based on a TMA design. Beyond the scientific mission goals, Teledyne will use the instrument for commercial applications. The main difference between DESIS and most of the hyperspectral design is that DESIS is equipped with a steering mirror for BRDF (Bidirectional Reflectance and Distribution Function) measurements; the minimum spectral resolution will be 2.55 nm which is realized over 235 channels in an spatial resolution of 30 m GSD (Ground Sample Distance). A 2D back illuminated CMOS (Complementary Metal Oxide Semiconductor) detector array from BAE (CIS2001) is employed.
Features of the DESIS instrument:
• Offner spectrometer, compact structure with a minimal number of optical components (lens, slit, primary mirror, convex grating and CCD array detector)
• Corrected, telecentric lens objective (robust, easy adjustment, low mass) with flat field and minimal aberrations, no complicated multi-mirror system
• Spherical primary mirror, which combines collimating and imaging optics
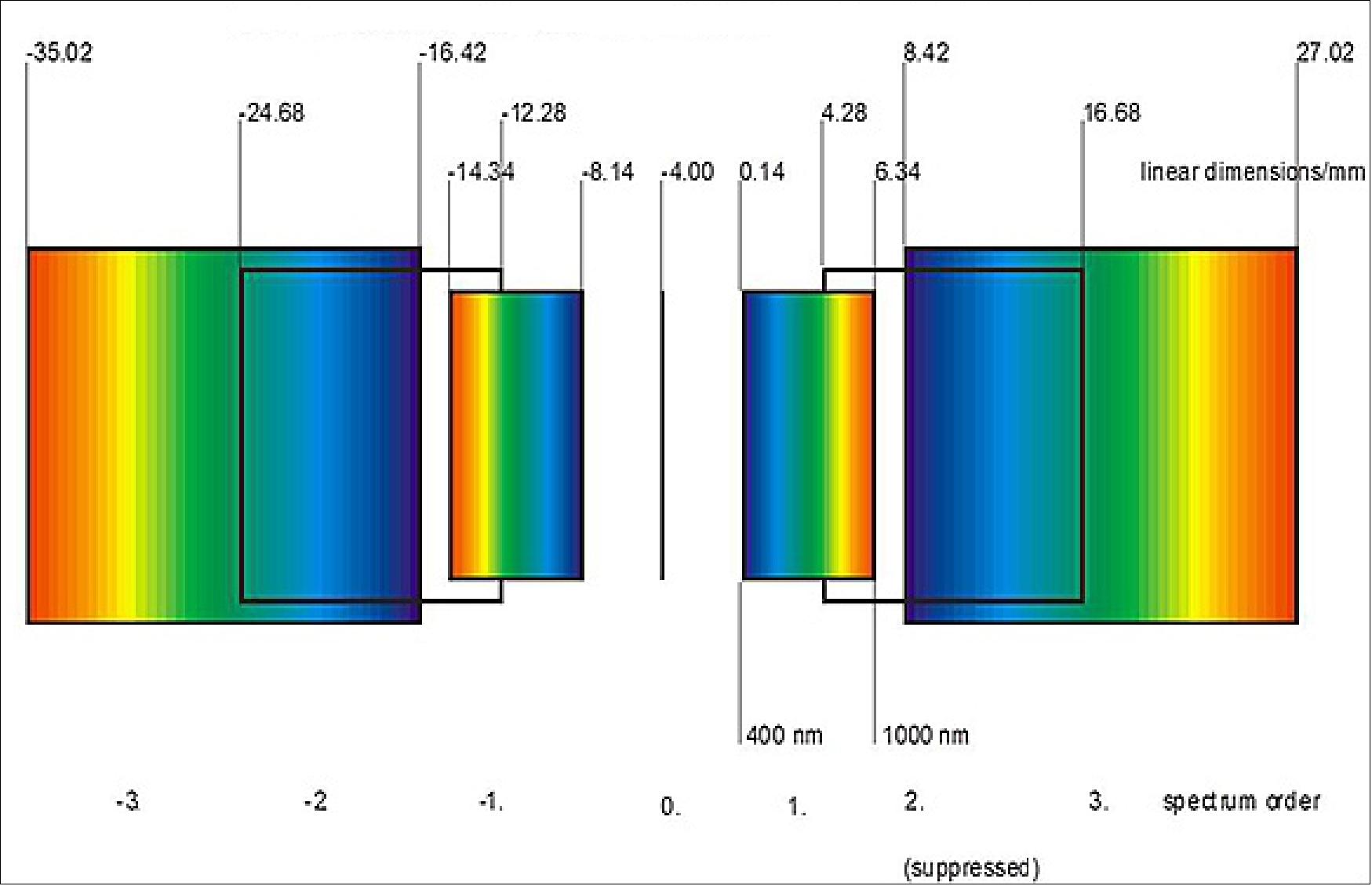
• Convex grating as dispersion element, the appropriate optimization of the spectrometer at high spatial and spectral resolution up to a flat focal plane (a prerequisite for using plane CCD detectors)
• A specially designed groove profile of the grating leads to:
- Almost complete suppression of the second order spectrum
- Almost complete polarization insensitivity of the spectrometer over the entire spectral range
• In-orbit calibration with internal lamps besides the spectrometer slit and with a LED screen
• Pointing unit (POI).
Telescope | F/No =2.8, Focal length =320 mm (telecentric) |
FOV, IFOV (Instantaneous Field of View) | 4.4º, 0.004º |
GSD (Ground Sample Distance) at nadir | 30 m@ an altitude of 400 km |
Swath width at nadir | ~30 km @ 400 km flight altitude |
BRDF (Bidirectional Reflectance and Distribution Function) angle | ±40º in flight direction |
Spectral range | 400-1000 nm |
Spectral sampling | 2.55 nm (programmable binning on-orbit up to 4x) |
Spectral channels | 235 @ no binning, 117 @ 2 band binning, 78 @ 3 band binning, 58 @ 4 band binning |
Spatial pixels | 1024 |
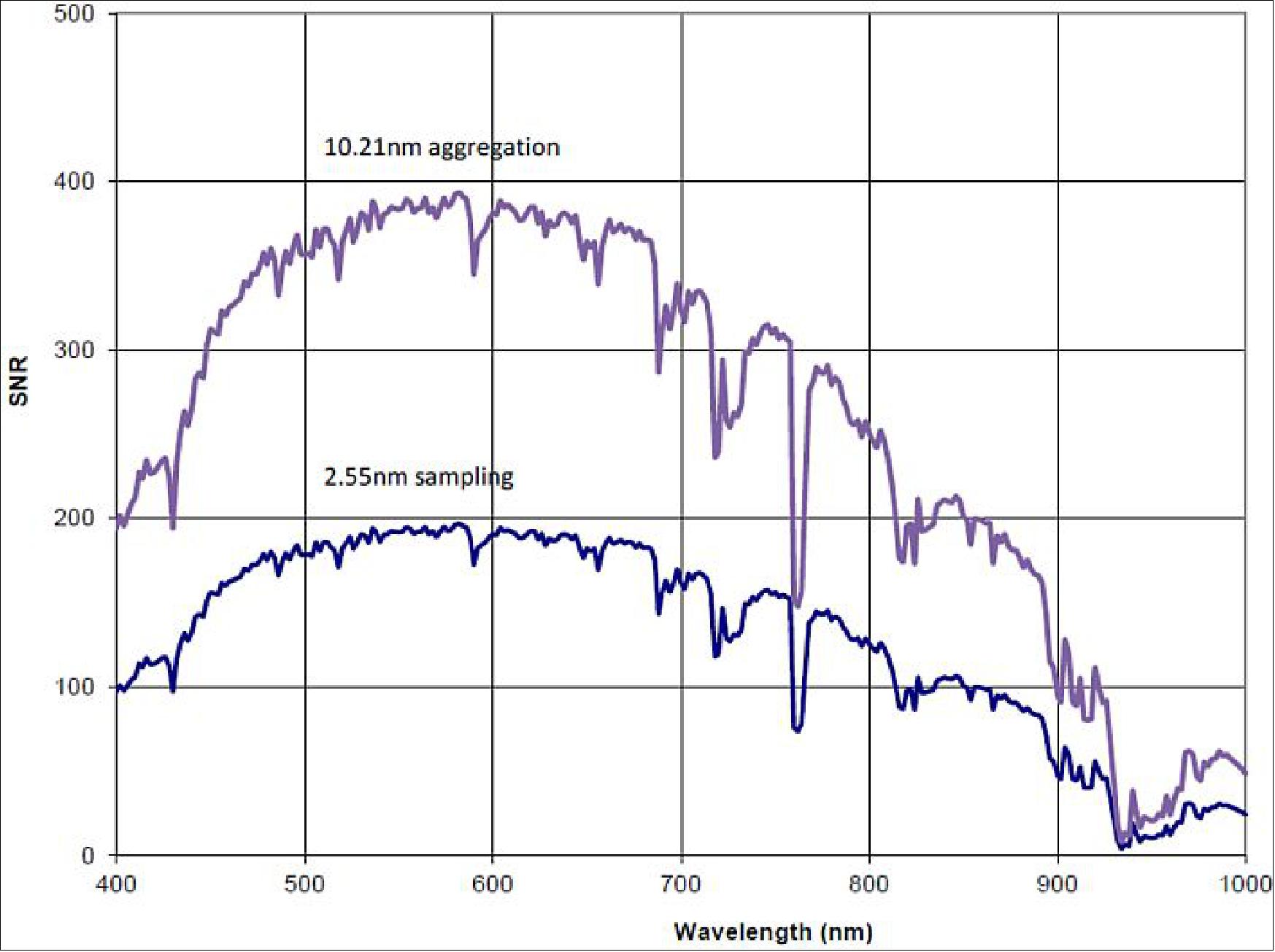
SNR (Signal to Noise Ratio) @ 550 nm | 205 sampled at 2.55 nm, 406 binned to 10.21 nm |
Radiometric linearity | >95% (10%-90% FWC) |
MTF (Modulation Transfer Function) @Nyquist without smearing | < 3 nm |
In orbit calibration | Internal LED field and dark / DSNU/PRNU/geometry/linearity |
Off-nadir capability | ± 15º along track by POI with 1º steps |
Pixel size | 24 x 24 µm |
FPA (Focal Plane Array) size | 1056 (spatial) x 256 (spectral) pixel |
Max frame rate | 232 Hz |
Pixel quantization | 12 bit plus 1 bit for low and high gain setting |
Pointing Unit | BRDF mode: 11 measurement positions ±15º ( every 3º) with 20 arcmin accuracy |
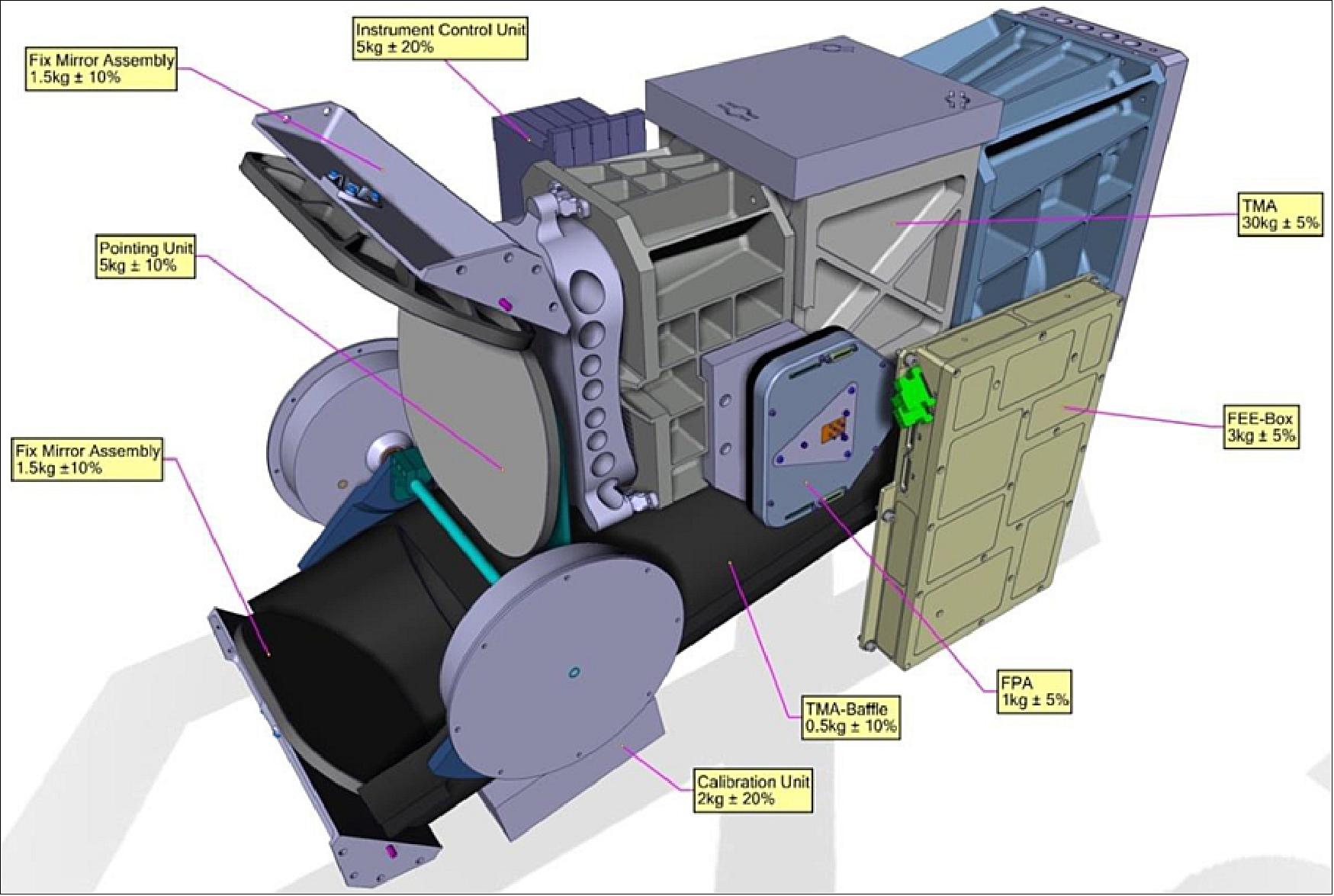
Instrument size | 430 mm x 190 mm x 135 mm |
Instrument lifetime | 5 years |
Instrument developer | DLR, Berlin/Adlershof |
Instrument mass | 88 kg (instrument+container) |
On-board programmable binning up to a factor of four is possible. The SNR (Signal-to-Noise Ratio) for the corresponding spectral sampling distances is shown in Figure 7. The GSD (Ground Sampling Distance) depends on the flight altitude and is about 30 m at nadir. This results in a swath width of about 30 km. The electronic shutter mechanism is based on a rolling shutter: each channel collects light during the same period of time, but the time light collection starts and ends is slightly different for each channel. As a result, each spectral channel integrates light over slightly different surface areas on ground.
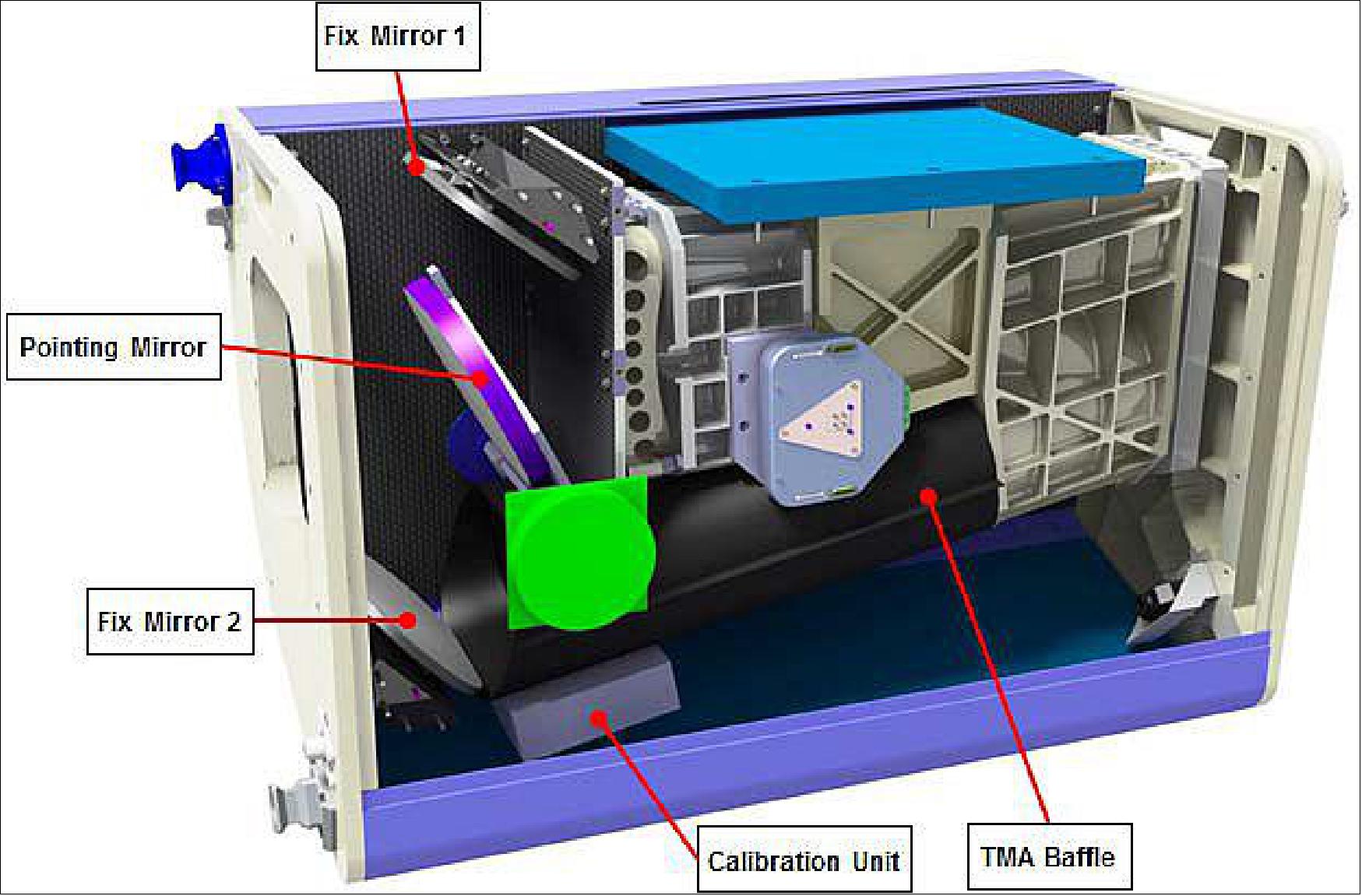
DESIS is equipped with a POI (Pointing unit) consisting of two fixed and one rotating mirror in front of the entrance slit that allows, by rotating one mirror, a forward and backward viewing change up to ±15° w.r.t. the nominal (e.g. nadir) view. The POI can be operated in a static mode with 3º angle steps for the viewing direction and in a dynamic mode with up to 1.5º change in viewing direction/s. This change in viewing direction allows – besides normal Earth data takes – acquiring experimental data to produce e.g. stereo or BRDF (Bidirectional Reflectance Distribution Function) products and continuous observations of the same targets on ground (FMC forward motion compensation). The POI can also be operated in calibration mode to minimize the external light fields and allowing on-board calibration measurements.
Besides a pre-flight spectral, radiometric and geometric calibration and characterization of the instrument in laboratory, the instrument contains an on-board calibration unit comprising different monochromatic and white light LEDs between 400 and 1000 nm. The calibration unit is located close to the POI mirror in front of the DESIS instrument, and allows the illumination of the full spectrometer FOV with color and white light. The calibration unit is characterized in laboratory and temperature controlled in orbit within 1 K.
With an instrument mass of 35kg (without container) and a size of ca. 400 x 400 x 500 mm, the instrument is suitable for small satellites. The operation onboard of the ISS shows the high performance which is possible with the instrument design.
The basic idea of MUSES is that all parts of the instrument can be controlled and operated via TCP/IP in the normal ISS network environment. This includes an on-instrument mass memory unit which is able to store up to 512 Gbit of data without data compression and an internal instrument control which is able to fulfill all the imaging and calibration modes.
DLR’s motivation to do the DESIS design together with Teledyne was to have the possibility to generate a new class of hyperspectral data. Of course, the design is able to generate standard data sets like most of the hyperspectral designs. But in addition the design is able to penetrate the atmosphere in different angles which allows a separation from volume to surface BRDF effects. This will be used to control the atmospheric correction to have a reproducibility of data results independent of the ISS inclination.
DLR will use the same technology to observe lightning by night not with the necessary special resolution but with the high spectral resolution. In this case DESIS will be operated in a forward motion compensation mode based on an analog steering mirror control. DESIS can also be operated in a forward motion compensation for other applications where the SNR shall be enhanced.
DLR is also interested to investigate work on florescence effects measurements in a surrounding of mega cities as well in the country side.
Development Status
• April 19, 2018: DLR (German Aerospace Center) and TBE (Teledyne Brown Engineering) are announcing the completion of the development and manufacturing process of the DESIS hardware. Operating the DESIS (DLR Earth Sensing Imaging Spectrometer) on the ISS (International Space Station) makes DLR the first user of the revolutionary multiplatform system MUSES (Multi User System for Earth Sensing) that was installed on board the ISS in 2017. The launch of the DESIS joint venture is scheduled for summer 2018 from Cape Canaveral and will be lifted into space by a SpaceX Falcon 9 rocket. 29)
- Hundreds of spectral channels for environmental monitoring: DESIS will be DLR's first instrument for the analysis of hyperspectral data on the ISS. "Hyperspectral sensing of Earth's surface is crucial for environmental monitoring," summarizes Pascale Ehrenfreund, Chair of the DLR Executive Board. "The continuous coverage of the VNIR (Visible Near Infrared) spectral range makes DESIS a multi-purpose instrument, which will help to gain new knowledge about agriculture, biodiversity, geology and mineralogy, coastal zones, water ecosystems, desertification and to detect changes in general."
- DESIS is a hyperspectral sensor system with the capability of recording image data using 235 closely arranged channels ranging from the visual to the infrared spectrum (between 400 and 1000 nm) with a spatial resolution of 30 m while in ISS orbit, at an altitude of 400 km. This data enables researchers to detect changes in the ecosystem of Earth's surface to assess the status of forests or agricultural areas, and therefore make yield predictions. Thus, one of the tasks of DESIS is to secure and improve global food cultivation.
- The spectral bands recorded by DESIS are also ideal for determining the quality of water, in particular of oceans and lakes. With the data, researchers are not only able to determine water composition and pollutants, but can also identify the causes of the contamination. Oil spills can be measured in their extent and also in their thickness. The water content of soil can also be analyzed using DESIS data. DESIS will be installed on the multi-platform MUSES, which can host up to four Earth observation instruments at the same time using the Canadian robotic arm (Canadarm2) on the ISS. The platform was designed, developed and built by Teledyne Brown Engineering. The instruments are mechanically locked in place and have a separate power supply. This configuration makes the International Space Station a universal instrument platform for Earth observation that also enables replacement, repair and maintenance. Due to the nature of this mission, it will also be possible to bring the instrument back to Earth after its operational life of five to eight years, in order to examine the effects of exposure to space conditions.
- High efficiency gain through cooperation with Teledyne Brown and utilization of the ISS: "The mere fact that we did not have to build an entire satellite around the DESIS instrument makes it a very cost-effective project," says Uwe Knodt, program manager of DESIS. While DLR is responsible for the construction of the instrument and the subsequent image data processing, Teledyne Brown and NASA are responsible for transport to the ISS and ensuring operations. Both organizations can greatly benefit from one another. While TBD has the commercial licence to use the image data, DLR provides expert imaging processing algorithms through licence payments and will retain the legal right to use the data for scientific applications. The use of MUSES and the ISS as an imaging platform allow instruments to be ready and operational in a very short period of time providing vital data to assist in scientific, humanitarian and commercial missions.
- "Teledyne Brown Engineering is thrilled with the progress achieved through the partnership with DLR," stated Jan Hess, President of TBE. "Our MUSES platform coupled with the DESIS and other instruments will assist in the advancement of Earth imaging, mapping, disaster recovery and agricultural assessments. Our goal is to quickly populate each slot aboard MUSES to allow for maximum coverage and data collection." This cooperation has had a fundamental impact on the development of DESIS. The entire planning and manufacturing process took just three and a half years – an almost record-breaking achievement considering such a modern instrument designed for low-Earth orbit.
- Together, DESIS and MUSES can look forward, backward and sideways from the ISS. This high degree of agility makes it possible to promptly provide information for relief organizations in the event of a disaster. Collaboration in this type of scientific and commercial operation is critical to the future prospects of hyperspectral remote sensing technologies for satellite missions. DLR and TBE want to leverage the data of DESIS and future MUSES instruments to further improve Earth observation and to expand the use of hyperspectral sensing in commercial applications.
Launch
The DESIS instrument was launched on 29 June 2018 on the SpaceX CRS-15 (Commercial Resupply Service-15) ISS logistics flight of the SpaceX Dragon capsule for NASA. The launch vehicle was the Falcon-9 and the launch site was Cape Canaveral, FL. 30) 31)
Orbit: Near circular orbit, altitude of ~400 km, inclination = 51.6º.
Status of the DESIS Instrument and Sample Observations
• October 2020: DESIS (DLR’s Earth Sensing Imaging Spectrometer), jointly developed by DLR (German Aerospace Center) and TBE (Teledyne Brown Engineering), is the first operating imaging spectrometer onboard the ISS. DESIS is integrated into the Multi-User System for Earth Sensing (MUSES) platform, which provides accommodations for two large and two small hosted payloads and provides position and attitude measurements, master time, data downlink, and other core services common for each payload. DESIS records data with an exceptionally high spectral resolution of 2.55 nm and a spatial resolution on the ground of about 30 m pixel size. In addition, DESIS is opening up further special fields of application. The off-nadir capability of DESIS with ±15º along the track during one image strip acquisition enables investigations of multiangular characteristics of objects on Earth, providing additional target-specific signatures. Finally, DESIS can be seen as a precursor instrument for EnMAP, as it has the same detectors in the VNIR range (Ref. 25). The experience gained, especially in the laboratory calibration and commissioning phase of DESIS, will be incorporated into the EnMAP program. 32)
DESIS Products
The DESIS instrument can continuously collect data up to a maximum length of 3000 km on the ground. Such Earth data-takes are embedded with measurements of the dark signal before and after the acquisition. The data-take is divided into 1024 x 1024 pixel tiles, corresponding to 30 x 30 km2 on the ground. Together with derived metadata and orbit/attitude products, the tiles are placed in a long-term archive. Data of different processing levels can be requested via web portals (Ref. 33). Table 2 summarizes the products a user or customer can order.
Product Type | Description | Order parameters |
L1B | Radiometric and sensor specific corrected data. Top of Atmosphere (TOA). All metadata attached | Spectral Binning |
L1C | L1B data orthorectified and resampled to a specified grid using global SRTM 1 arcsec DEM | Map Projection |
L2A | L1C data atmospherically corrected (reflectance) using global SRTM 1 arcsec DEM for | Terrain Correction |
A detailed algorithm description and the product specifications can be found at the DLR DESIS Official Website (Ref. 33). This website also describes how users from the scientific community can obtain DESIS data and view the License Agreement regarding the Use of the DESIS Data for Scientific Use. It should be noted that the use of DESIS data with spectral sampling better than 10 nm requires a special approval.
Product Quality and Validation
Based on some laboratory instrument characterization the radiometric, geometric and spectral characterization of the instrument has been significantly improved by vicarious calibration using ground measurements at well known test sites and through cross-calibration with Landsat-8 and Sentinel-2 data. The following gives an overview of the data validation studies.
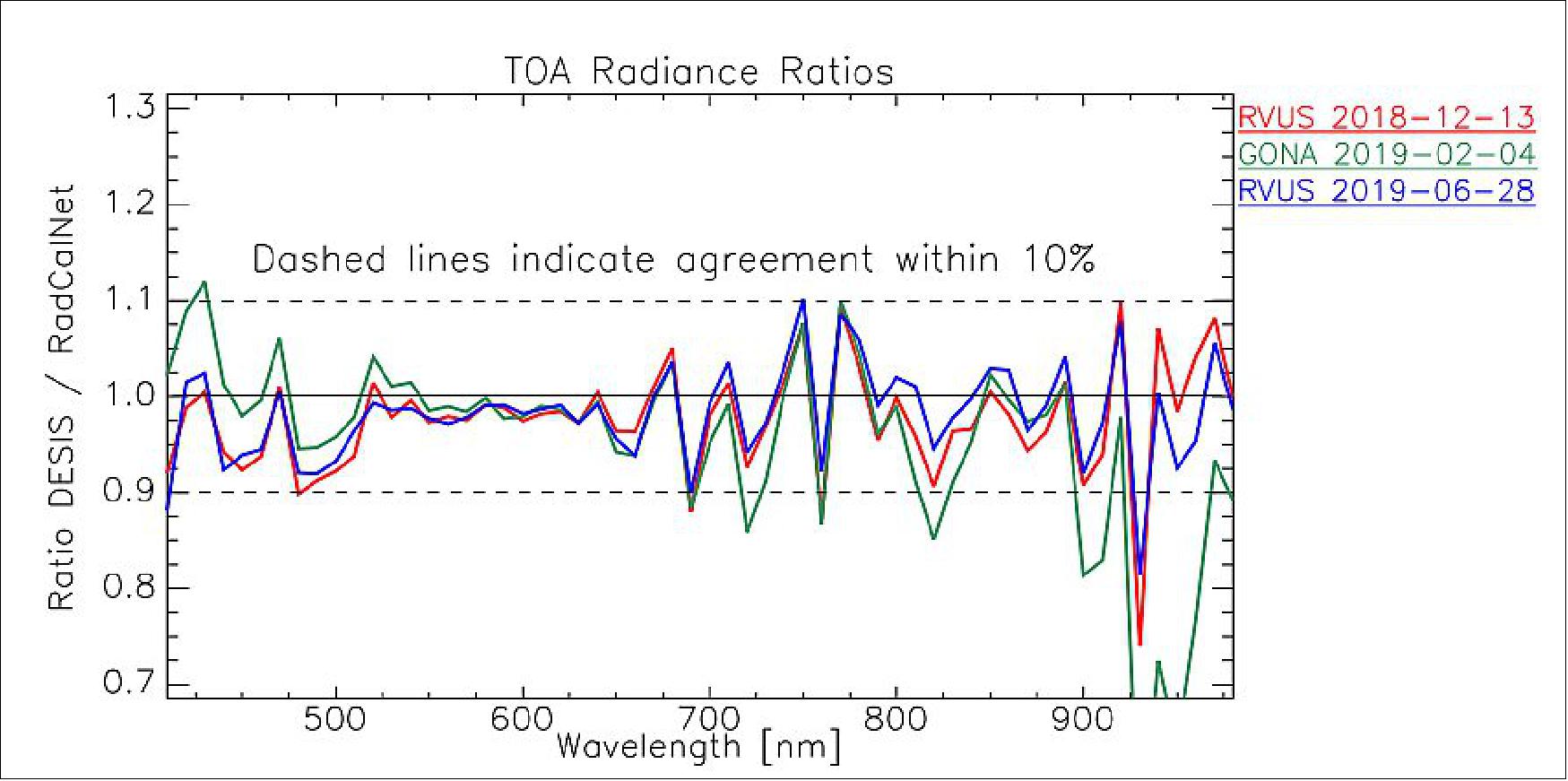
TOA (Top of Atmosphere) Validation against RADCALNET
Test Site | Date | SZA | VZA |
RVUS 1 | 13 December 2018 | 64.0º | 0.8º |
GONA | 04 February 2019 | 35.3º | 3.9º |
RVUS 2 | 28 June 2019 | 19.0º | 3.5º |
Table 3 shows the test sites and dates, which are used for Top-of-Atmosphere validation of the DESIS radiometric data which are covering a time frame of six months.
DESIS shows good overall agreement to all three RadCalNet measurements, as it lies within 10 % except for atmospheric absorption features (Figure 15). The differences between RadCalNet and DESIS, up to ~525 nm, are partially due to noise. From ~525 nm to ~650 nm, the results are excellent, which is also due to the fact that this wavelength region has a high SNR and minimal atmospheric features. Beyond these wavelengths, the results are likely contaminated by uncertainties in water vapor and atmospheric features, even more so as small wavelength calibration errors may also amplify the atmospheric differences. Finally, for wavelengths above ~800 nm, the Etalon effect of the CMOS sensor also has an influence. In addition, discrepancies might also result from other sources including the spectral resampling steps, viewing angle and other BRDF (Bidirectional Reflectance and Distribution Function) effects, as well as slight differences within the E0 model and the actual solar irradiance.
Special Calibration
Spectral characterization of the instrument is essential, especially when the measurement data are linked to the atmospheric transmission spectra, as in L2A processing. Inaccuracies of tenths of nanometers in the spectral response can lead to strong distortions in the derived reflection spectra, especially in the region of atmospheric absorption bands. Spectral calibration of the DESIS instrument was performed in the laboratory and provided the baseline for spectral referencing of the DESIS data. Through vicarious calibration, a minor update of the spectral referencing was performed with respect to the pre-flight calibration.
For the validation of the DESIS spectral calibration, data from different calibrations and processing steps are analyzed. In Table 4, the results of this analysis are shown for the Gobabeb scene from 4 February 2019, which was found to be representative. In general, the laboratory-based spectral calibration already results in an average spectral shift of ~0.5 nm for this wavelength range, which can be further improved when applying the spectral smile correction to ~0.4 nm. Using the updated vicarious in-orbit calibration, these shifts are significantly reduced to ~0.2 nm for both processing levels.
Band | Lab Cal. | Vicarious Cal. | ||
No smile correction | Smile correction | No smile correction | Smile correction | |
141 (~760 nm) | -052 | -046 | 0.19 | 0.26 |
143 (~765 nm) | -052 | -046 | -0.09 | -0.02 |
146 (~773 nm) | -0.53 | -0.45 | -0.37 | -0.29 |
Bottom-of-Atmosphere (BOA) Reflectance Validation
To validate the Bottom-Of-Atmosphere (BOA) reflectance, we selected spectra from RadCalNet sites, on three different RadCalNet sites: La Crau (France), Railroad Valley Playa (USA), and Gobabeb (Namibia).
The DESIS BOA surface reflectance is consistent with the RadCalNet measurements with 10% relative difference for two different sites and for all wavelengths, except for the first bands (<420 nm) that show a difference up to 20%. This relative difference agrees with the RadCalNet site variability. For an example of the relative differences in surface reflectance see Figure 16.

Geometric Validation
In order to improve the parameters of the geometric sensor model GCPs (Ground Control Points) are generated for each DESIS scene using image matching employing reference images. If this on-the-fly method fails, parameters derived from statistical evaluation of a series of previous acquisitions are used. In this case, thermal influences on the MUSES/DESIS system and uncertainties in the attitude and position measurements result in worse geometric accuracy. For the assessment of the geolocation accuracy and boresight angle determination, 177 scenes were analyzed. These scenes were acquired globally with off-nadir viewing angles up to 26º and solar zenith angles up to 73º. On average, 210 GCP per scene were found for the improvement of the sensor model parameters and 968 CP per scene for accuracy assessment. The achieved linear RMSE (Root Mean Square Error) with respect to the reference scenes based on the evaluation of individual scenes is given in Table 5 and is below one pixel size (0.7 pixel).
RMSE x (Easting) | RMSE y (Northing) |
21.0 ± 5.9 m | 21.4 ± 6.0 m |
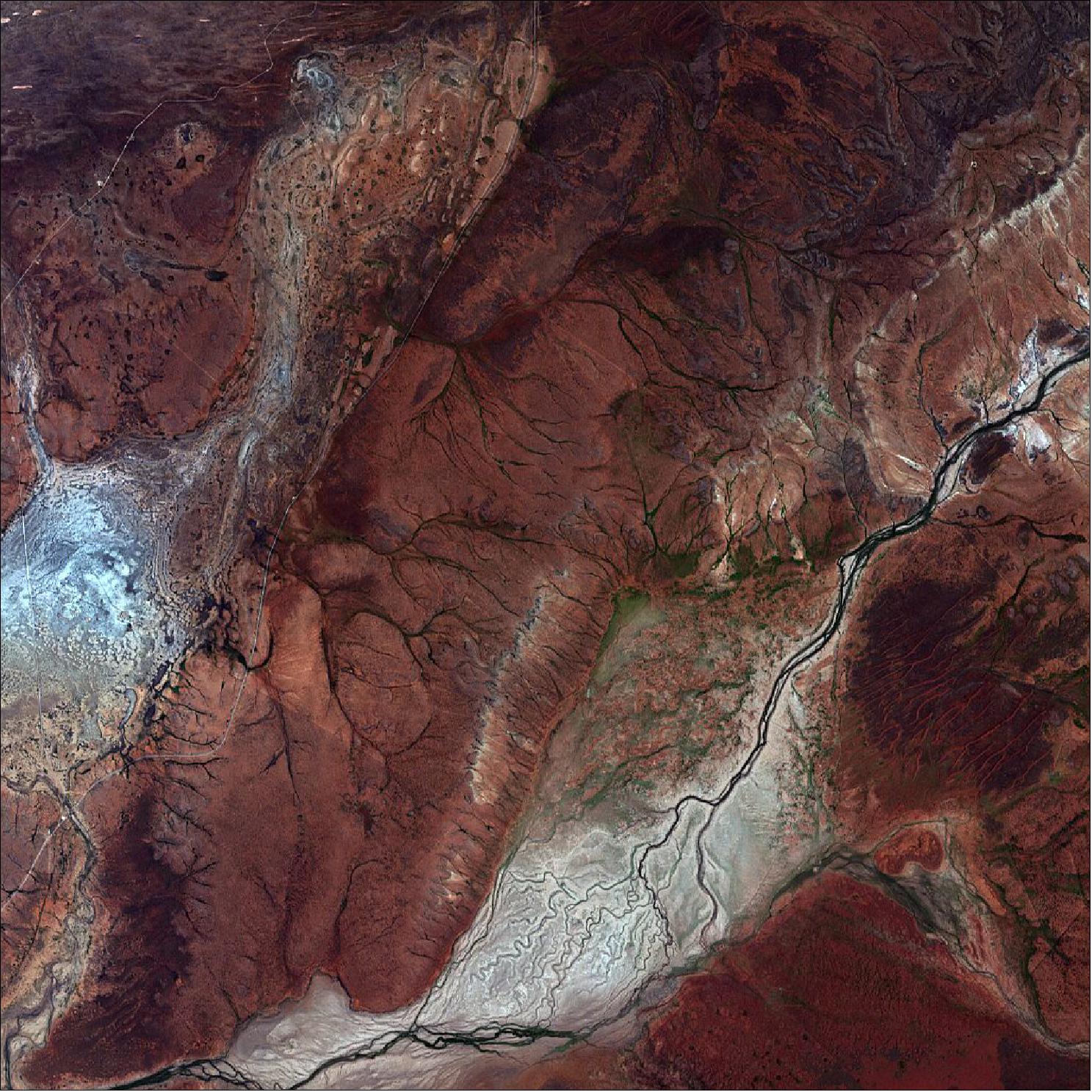
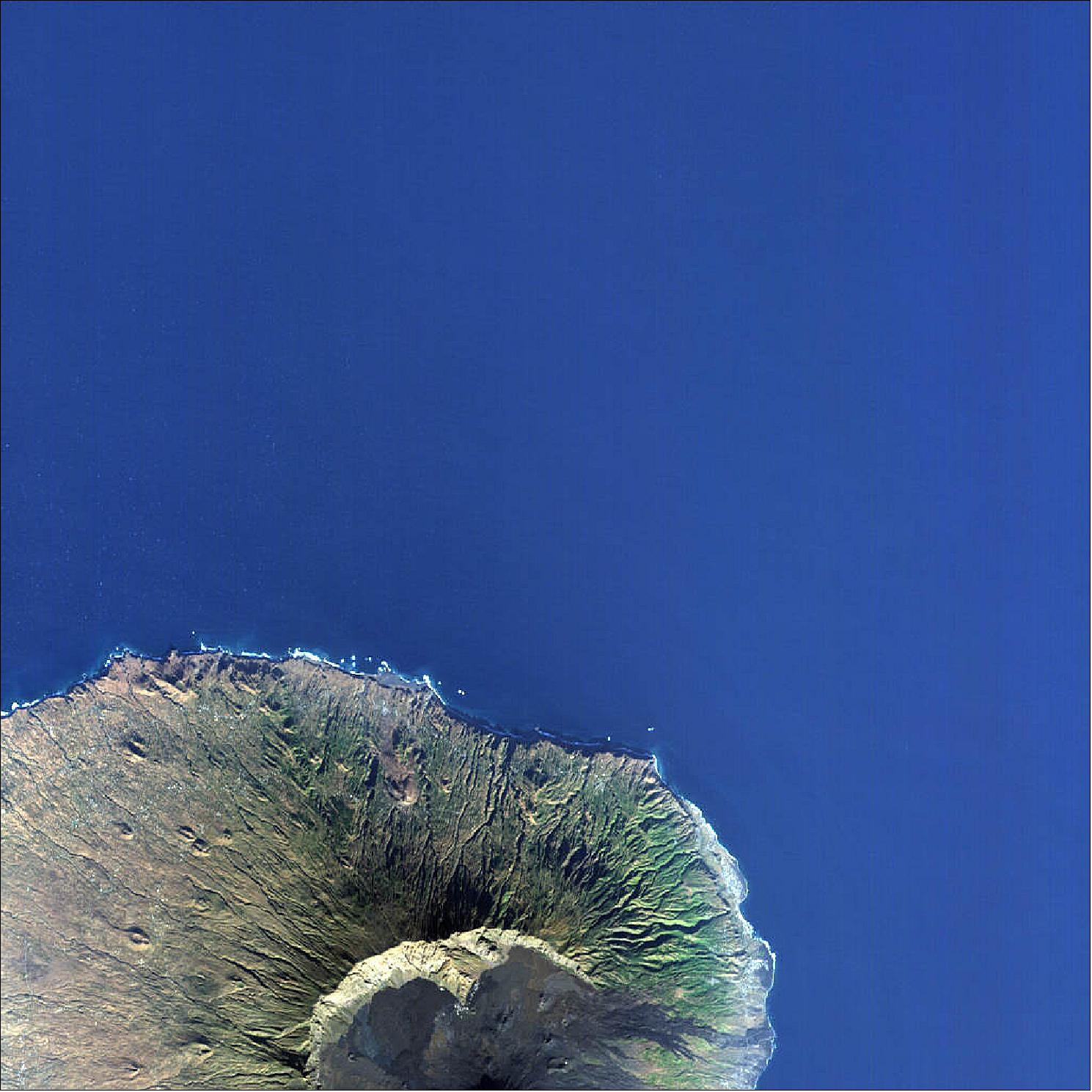
• March 2020: Sample images of DESIS provided by DLR. 33)
Teledyne Brown Engineering (TBE) located in Huntsville, Alabama, USA, and the German Aerospace Center (DLR), Germany, operate the imaging spectrometer DESIS that is integrated in the Multi-User-System for Earth Sensing (MUSES) platform installed on the International Space Station (ISS).
DESIS quantifies solar irradiance reflected from the Earth surface as a response to their specific condition. DESIS measurements greatly advance our ability to characterize vegetation health and stress, water quality and pollution as well as the Earth mineral resources. Thus, it supports the management of agricultural and forest ecosystems, it helps to monitor the biodiversity of our planet and it greatly enhances our understanding of important carbon and water cycling processes.
The DESIS is realized as a pushbroom imaging spectrometer spectrally sensitive over the visible and near-infrared wavelength range from 400 to 1000 nm. The optical design is based on the Offner-type grating spectrometer widely used in imaging spectrometer designs. The Ground Sampling Distance (GSD) at nadir view depends on the flight altitude of the ISS and is about 30 m resulting in a swath width of about 30 km.

• October 2019: A summary is given here in a paper published in October 2019, covering many aspects of the DESIS instrument, in particular the topics of data products, data quality and validation of DESIS. 34)
In May 2014, the German Aerospace Center (DLR) and the US company Teledyne Brown Engineering, Inc. (TBE) agreed to install and operate the imaging spectrometer DESIS on board of the International Space Station (ISS). The instrument, built by DLR, is the first of four possible camera systems that can be hosted by the MUSES platform. In August 2018, the DESIS spectrometer was integrated into MUSES, which marked the start of the commissioning phase. The DESIS on-orbit functional tests were successfully passed and the DLR-built processing systems installed at DLR and TBE (Teledyne Brown Engineering) are stably producing L1B, L1C and L2A products. Now, about five years since mission kick-off, the operational phase has been entered and the distribution of the data to the scientific and commercial community has begun. In this article, the main outcomes of the commissioning phase are presented, which are summarized as follows:
a) Absolute radiometric calibration is well within 10% at the TOA (Top-Of-Atmosphere) radiance and TOA reflectance level when validated against RadCalNet (Radiometric Calibration Network), Sentinel-2 and Landsat-8 .
b) Spectral calibration after smile correction is typically better than 0.5 nm, and always within 1/3 of a spectral pixel.
c) SNR is greater than 200 in the green spectral region for a 30% albedo, 45 degree solar elevation, MLS 23 km visibility, and rural aerosol TOA radiance.
d) MTF (Modular Transfer Function) @Nyquist (across track) is about 0.3–0.4.
e) Geometric accuracy with respect to reference is 20 m (<1 pixel) linear RMSE (Root Mean Square Error) in the case that GCPs (Ground Control Points) can be derived from image-to-image matching; otherwise, RMSE is 300–500 m.
f) BOA (Bottom-Of-Atmosphere) reflectance is within <10% based on RadCalNet, Pinnacles, and Sentinel-2 comparisons.
g) The current limitations in the use of the various DESIS data products herein are described, as well as future work and improvements.
Despite the discussed limitations of the instrument, DESIS has several advantages compared to other imaging spectrometers. The high spectral sampling of 2.55 nm with a SNR of about 200 is currently unique and allows investigations of very narrow band features in the spectrum reflected from a target on ground.
• August 2019: The DESIS instrument has been in operation since its installation on 28 August 2018. In this time DESIS has operated within the nominal parameters and has acquired more than 1300 products. 35)
DESIS Data Processing Chain
The DESIS automatic data processing chain provides different level products from the imaging DESIS data. Following the European Space Agency definition, the DESIS level products are Level 0 (L0), Level 1A (L1A), Level 1B (L1B) and Level 1C (L1C) and Level 2A (L2A). All products are based on 30 x 30 km tiles obtained from the original 30 km width acquisition stripes.
L1A products are internal (no user deliverable) products consisting of the original raw DESIS data divided into the 30 x 30 km tiles where radiometric, spectral and geometric correction and calibration are appended, but not applied. The data include satellite position and pointing annotations. Additional useful information for long term archiving of the L1A products is also derived, including screening of DESIS instrument parameters and evaluation of Dark Current (DC) measurements.
L1B products are L1A data that have been radiometrically calibrated (at-sensor or TOA radiance), spectrally referenced and quality-controlled. Radiometric calibration is performed using calibration tables for the acquisition time period. Systematic sensor effects are also corrected at this step. The corrections applied include dead pixel flagging and interpolation, smile correction and rolling shutter correction. Data quality indicators are generated in L1B products and they include abnormal pixel masks, band -to-band correlations, bad-line and bad-column mask. The L1B products include all information required for further processing the output to higher product levels.
L1C products are L1B products, TOA radiance, orthorectified and resampled to a user selectable map projection. L1C processor employs the technique of rigorous model of the Direct Georeferencing. This technique is based on the line-of-sight (LoS) model, derived from the collinearity equation. To achieve a higher geometric accuracy, an improvement of the (LoS) model is performed by automatic extraction of ground control points (GCP) from reference images with an absolute geometric accuracy of about 15 m (linear Root Mean Square) using image matching techniques. The L1C products also include quality information about the image matching and orthorectification processes.
L2A products are atmospherically corrected products obtained from the corresponding L1C products. Atmospheric correction is performed with a new code (PACO) which is based on the well-known ATCOR code. Over land, and provided that a geometric absolute accuracy better than one pixel is achieved, a combined atmospheric and topographic processing is performed inside PACO. The output L2A products include not only the ground reflectance cube but also maps for estimated WV (Water Vapor), AOT (Aerosol Optical Thickness) and image masks for land, water, haze, clouds, cloud-shadows and snow.
Although the ISS orbit does not allow for sun-synchronous Earth observations, the DESIS instrument has operated with stable temperatures in all monitored components. It has also shown very stable DC values for all image pixels in all imaging conditions. Based on the analysis of the 762 nm Oxygen band, it has been determined that spectral calibration of the DESIS instrument has also been very stable over time. In addition, the analysis of this spectral feature has been used to asses that no residual smile effect is present after correction in L1B processor.
Concerning geometry, an estimation of boresight angles based on 6489 GCPs (Ground Control Points) shows an accuracy (RMS) of 20 m in the North-South direction and also 20 m in the East-West direction, both below 1 pixel (30 m).
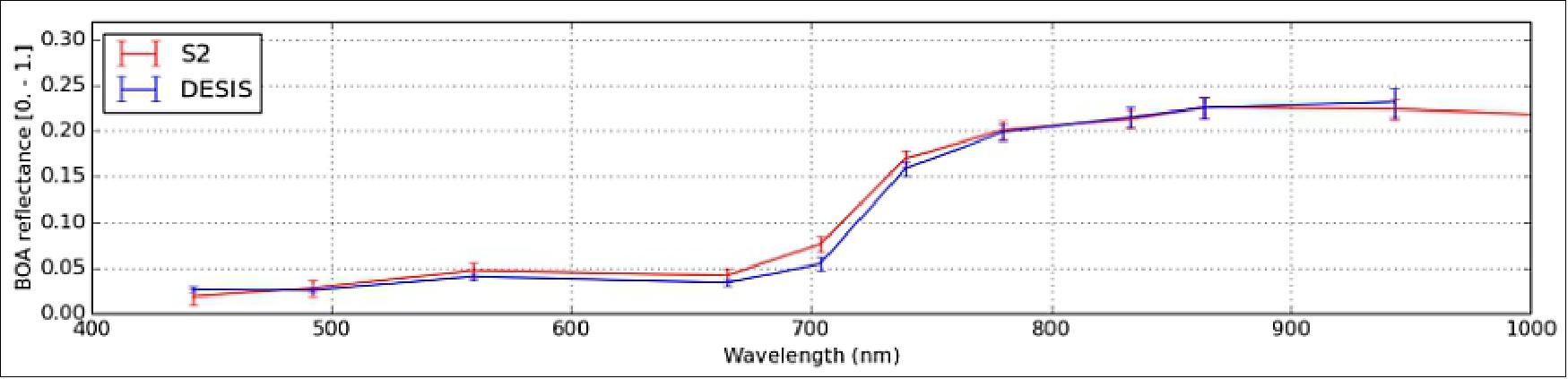
For L2A products, a comparison with Sentinel-2 (S2) data has been performed by resampling DESIS reflectance spectra to S2 bands and by selecting scenes less than 5 days apart between DESIS and S2. The results show a good agreement between S2 and DESIS average reflectance as shown in Figure 19 for selected scenes (scenes where conditions for atmospheric correction are applicable). For individual scenes, and patches within the scenes, the absolute differences in reflectance between S2 and DESIS are always below 0.025 for 0 ≤ ρ ≤ 0.15 and below 0.030 for 0.15 ≤ ρ ≤ 0.25.
A good agreement for WV and AOT retrieval is also observed in selected L2A products. Agreement between estimated AOT and AERONET (AErosol RObotic NETwork) stations is better than 0.07 when sufficient DDV (Dark Dense Vegetation) pixels are found in the scene. For WV, the agreement with AERONET stations is typically below 10% for stations near the area of study.
• June 2019: Teledyne Brown Engineering (TBE) and DLR operate the imaging spectrometer DESIS that is integrated in the Multi-User-System for Earth Sensing (MUSES) platform installed on the International Space Station (ISS). 36)
- DESIS quantifies solar irradiance reflected from the Earth surface as a response to their specific condition. DESIS measurements greatly advance our ability to characterize vegetation health and stress, water quality and pollution as well as the Earth mineral resources. Thus, it supports the management of agricultural and forest ecosystems, it helps to monitor the biodiversity of our planet and it greatly enhances our understanding of important carbon and water cycling processes.
- The DESIS instrument is realized as a pushbroom imaging spectrometer spectrally sensitive over the visible and near-infrared wavelength range from 400 to 1000 nm. The optical design is based on the Offner-type grating spectrometer widely used in imaging spectrometer designs. The Ground Sampling Distance (GSD) at nadir view depends on the flight altitude of the ISS and is about 30 m resulting in a swath width of about 30 km.
Some sample images:


Data Access
- DESIS Data can be tasked and ordered for free for scientific purposes due to a general image data announcement that will be open until the DESIS mission ends. It requires a short description of the envisaged use of the data in form of a proposal and a subsequent review process.
- The main objective of the “DESIS Data Announcement of Opportunity” is to evaluate the scientific capabilities of the DESIS data. It includes basic and application-oriented research, including development and demonstration of future applications to increase knowledge in science and does not include commercial use. Scientific use of the DESIS data is not restricted to any specific topic but it can include:
a) Basic and application oriented research,
b) Preparation and execution of government-funded education, research and development programs,
c) Development and demonstration of future applications for scientific and/or operational use,
d) Support of the MUSES mission (e.g. calibration, monitoring and validation) and
e) Exploring synergies with other operating and upcoming Earth observing sensors onboard ISS such as ECOSTRESS, GEDI, OCO-3 and EMIT (all NASA), the hyperspectral HISUI (METI) and future sensor systems integrated into MUSES platform.
This general “DESIS Data Announcement of Opportunity” will be open until the DESIS mission ends.
• October 02, 2018: DLR (German Aerospace Center) and Teledyne Brown Engineering presented the first images of the DESIS hyperspectral Earth observation instrument at the IAC (International Astronautical Congress) in Bremen, Germany. The instrument was mounted to the exterior of the International Space Station on 27 August 2018. 37)
- DESIS (DLR Earth Sensing Imaging Spectrometer) has the highest performance of any hyperspectral Earth observation instrument in space. From its 400 km-high orbit on the ISS (International Space Station), this instrument acquires imagery on 235 closely spaced spectral channels with a ground resolution of 30 m. This data is making it possible for scientists to gain very precise details of changes to Earth's ecosystems. For example, they can use the information obtained to assess the health condition of forests or agricultural areas, and take such assessments as the basis for yield forecasts. They can also use this data to monitor environmental problems, thus providing the basis for devising measures to protect the environment and resources.
- Hansjörg Dittus, DLR Executive Board Member for Space Research and Technology, is enthusiastic: "I am happy to say that the installation of DESIS – and its commissioning – have proceeded smoothly. We have already received and analyzed the first data – one month earlier than anticipated. The wealth of data provided by DESIS is a fresh source of knowledge for agriculture, biodiversity, geology, water-based ecosystems and desertification. It is thus a very important instrument for the environmental monitoring of Earth." The hyperspectral instrument is a joint project between DLR and the United States company TBE (Teledyne Brown Engineering), which owns the MUSES (Multiple User System for Earth Sensing) Earth observation platform on the ISS. In the course of this joint venture, DESIS will be providing DLR with data for scientific purposes, while TBE will be responsible for the commercial distribution of the hyperspectral data.
- David Krutz, project manager for the DESIS instrument – and therefore the person responsible for the construction of the instrument at DLR's Institute of Optical Sensor Systems in Berlin-Adlershof – was equally enthusiastic: "DESIS fulfils all expectations." For the initial commissioning, Krutz travelled to TBE's facility in Huntsville, where the MUSES control center is based. This gave Krutz the opportunity to work with TBE's engineers to commission all of the subsystems immediately after installation. Krutz summed it up as follows: "DESIS has successfully passed all of its tests, and we were able to acquire the first image amazingly fast. Seeing the first results with our very own eyes was truly special."
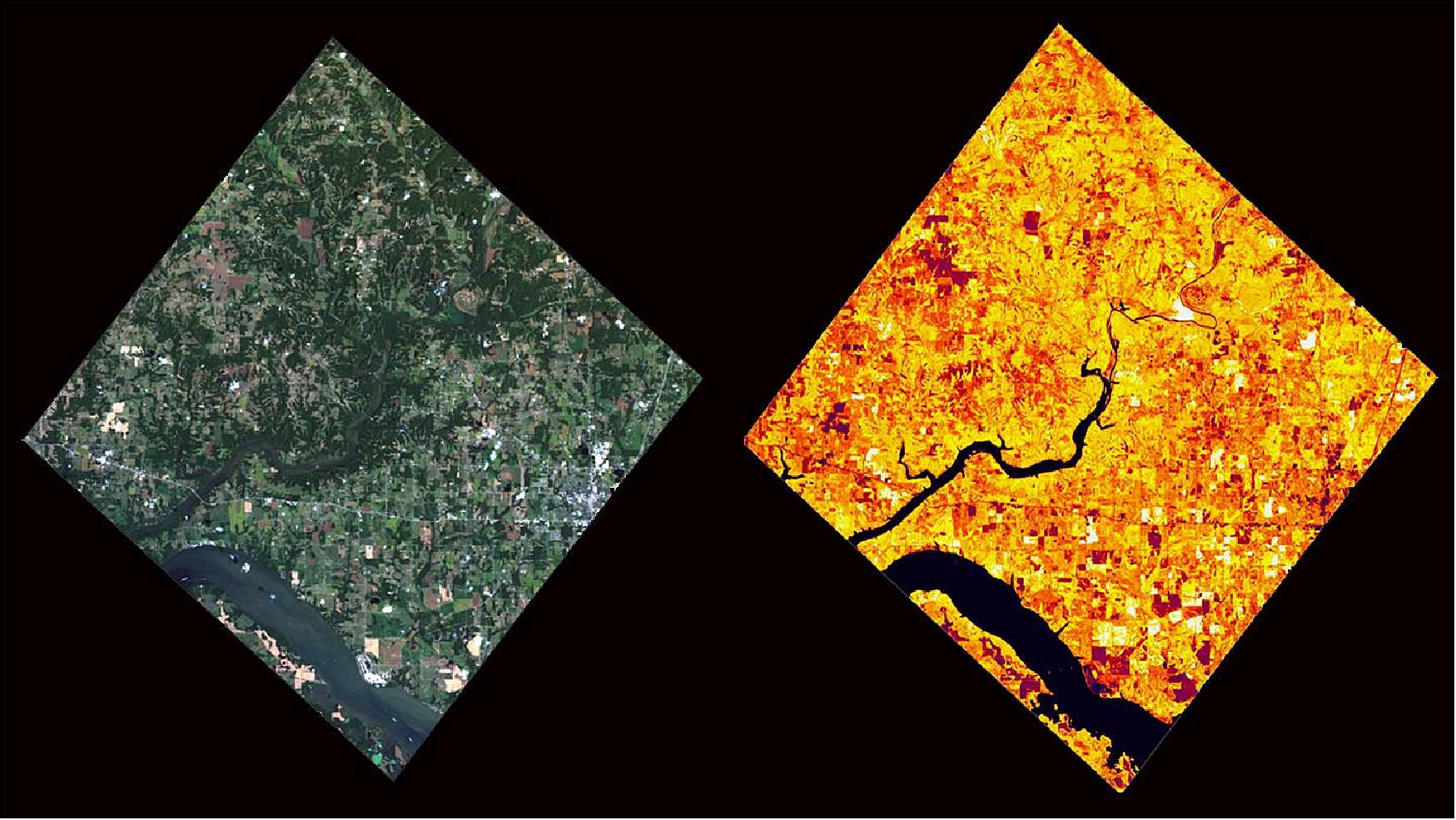
- Rupert Müller, project manager for the ground-level segment within DLR's EOC (Earth Observation Center), had confidence in the system: "DESIS has crucially expanded our know-how in the field of Earth observation. Although there is still a lot to be done before DESIS is operational, the first images are very promising. We can derive a fascinating extent of information from the data." The team of scientists and engineers has already been able to complete the first topic-centered analyses: it has been possible to arrive at an assessment of the concentration of chlorophyll a in the waters around the Falkland Islands from the corresponding image. And researchers working near Huntsville have succeeded in quantifying the content of colored dissolved organic matter in the Tennessee River in Alabama, USA. These substances consist of organic material, such as leaves and roots. Long organic molecule chains are produced in the process of exposure to weathering, and these chains can be well detected by DESIS on a range of spectral channels. By merging its data with other Earth observation data, especially in conjunction with some of the sensors that will be used on the MUSES platform in the future, it will be possible to further improve the quality of the data obtained by DESIS.
• August 27, 2018: After its launch to the ISS (International Space Station) on 29 June2018, the DESIS (DLR Earth Sensing Imaging Spectrometer) instrument was unpacked and is now being prepared for installation on the Space Station's exterior. 38)

- Its view of Earth will be something special: The DESIS hyperspectral instrument has 235 spectral channels to look at our planet and observe the changes in land and water surfaces. On 27 August 2018 at about 21:00 CEST, the instrument developed by DLR (German Aerospace Center) and equipped with a robotic arm was taken out of the airlock of the ISS and installed on the MUSES platform located on the space station's exterior. The hyperspectral data obtained from space is expected to deliver information for environmental monitoring, among other uses. "With this data, for example, we can recognize whether the plants in a field on Earth are in a state of stress at a given point in time from a distance of 400 km," says DLR project manager Uwe Knodt. "This will allow us to look at the world from a new perspective and thereby benefit our society through this view from space."
- Several conditions can trigger stress on a plant: insufficient nutrients, unfavorable environmental conditions and an inadequate water supply. The evaluation of DESIS hyperspectral data through sophisticated algorithms will enable conclusions to be drawn in this regard. Farmers, in turn, could benefit from this data from space by learning at an early stage whether their fields must be fertilized in a specific way, and which fertilizer their plants need. The images acquired by the DLR instrument can also provide information on the plants' stage of life, as well as the moisture content of soil and plants. "As a result, the global cultivation of food – and therefore the provision of food – can be optimized," Knot explains. In addition, the instrument can deliver information on the health of forested areas, identify the mineralogical composition of specific regions, and record the constituent elements and quality of oceans and lakes.
- The speed of the images and the flexible angle for viewing Earth from space enable other applications besides resource monitoring and environmental surveillance. These potential uses include humanitarian aid, whereby emergency rescue teams could receive valuable information from space quickly and in a timely manner in the event of a disaster.
- DESIS is a joint project between DLR (German Aerospace Center) and the U.S. industrial company Teledyne Brown Engineering, which owns the Earth-observation platform known as MUSES (Multiple User System for Earth Sensing). Within the framework of this collaborative arrangement, DESIS is expected to provide DLR with data for scientific purposes, while Teledyne Brown will take responsibility for the commercial part of the hyperspectral data. Two DLR institutes are involved in the project: The Institute of Optical Sensor Systems built the instrument as part of the space segment subproject, while DLR/EOC (Earth Observation Center) in Oberpfaffenhofen is managing the ground segment subproject, which is responsible for the reception of data, its processing and transfer into applications.
• July 2, 2018: Teledyne Technologies Incorporated announced today the successful launch of the DLR Earth Sensing Imaging Spectrometer (DESIS) to the International Space Station (ISS) on a SpaceX Falcon 9 rocket. Over the next three months, the DESIS instrument, designed and built by the German Aerospace Center (DLR), will be installed and tested on Teledyne Brown Engineering’s Multi-User System for Earth Sensing (MUSES) aboard ISS. 39)
• June 29, 2018: After arriving at the ISS, the instrument will be unpacked and prepared for use on the Multiple User System for Earth Sensing (MUSES) platform developed by TBE. This platform can accommodate up to four Earth observation instruments. DESIS will be moved into space through the airlock of the Japanese Experiment Module (JEM). It will then be installed on the MUSES platform using the Canadian robot arm Canadarm2. Installation will take one day, and will be followed by commissioning, which includes a system check and a pointing calibration test for sites on Earth (Ref. 30).
Processing Chain and Products
The DESIS products are derived from tiled data takes of a size 1024 x 1024 pixels (i.e. about 30 x 30 km2), which are generated within an automatic processing chain. Two identical processing chains are implemented within DLR and the TBE Ground Segment. The processing levels are following the definitions of ESA (European Space Agency).
DESIS level 1A products – namely Earth image scenes, onboard calibration measurements, dark current measurements and experimental products - will be long-term archived together with the corresponding metadata, while level 1B products (systematically and radiometrically corrected data), level 1C products (geometrically corrected data), level 2A products (atmospherically corrected data) will be processed on demand before being delivered to the user (Ref. 11).
1) Product Level 0 (L0) – internal product: Raw data after restoration of the chronological data sequence for the instrument(s) operating in observation mode, at full space/time resolution with all supplementary information to be used in subsequent processing (e.g. orbital data, health, time conversion, etc.) appended. Level 0 data are time-tagged. The precision and accuracy of the time-tag shall be such that the measurement data may be localized to accuracy compatible with the user’s requirements.
2) Product Level 1A (L1A) – internal product; archive: Level 0 data with corresponding radiometric, spectral and geometric (i.e. Earth location) correction and calibration computed and appended, but not applied.
3) Product Level 1B (L1B) – deliverable: Level 1A data not re-sampled, quality-controlled and radiometrically calibrated, spectrally characterized, geometrically characterized, annotated with satellite position and pointing, landmarks and preliminary pixel classification (e.g. land/water/cloud mask). The Level 1b product consists of TOA (Top of Atmosphere) radiance (Wm-2 sr-1 µm-1).
4) Product Level 1C (L1C) - deliverable: Level 1b data orthorectified, re-sampled to a specified grid. Image re-sampling shall be performed using a selectable re-sampling method including at least bi-cubic convolution interpolation and nearest neighbor.
5) Product Level 2A (L2A) - deliverable: Earth located pixel values converted to ground surface reflectance, i.e. after atmospheric corrections.
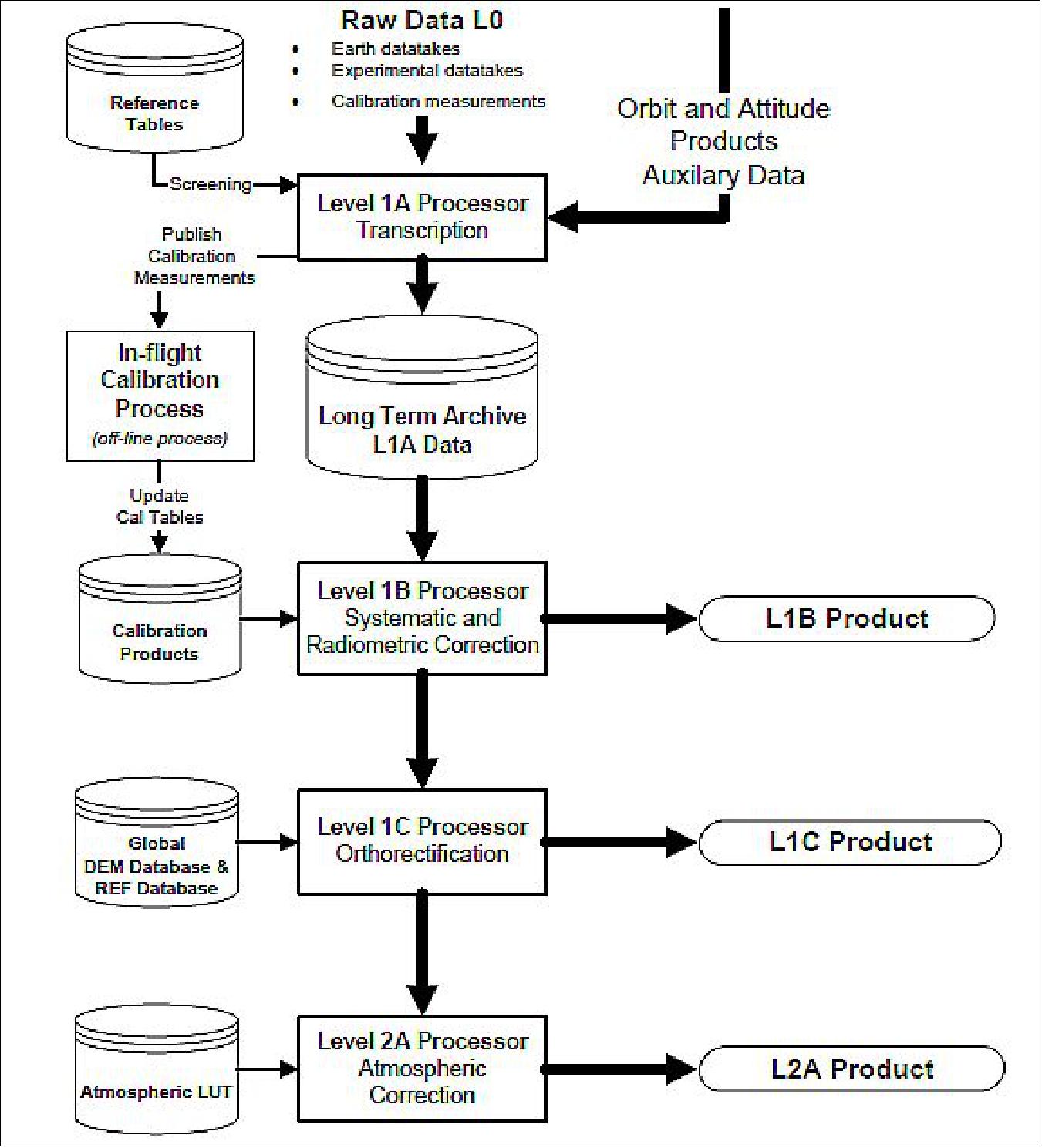
DESIS level 1A products – namely Earth image scenes, on-board calibration measurements, dark current measurements and experimental products - will be long-term archived together with the corresponding metadata, while level 1B products (systematically and radiometrically corrected data), level 1C products (geometrically corrected data), level 2A products (atmospherically corrected data) will be processed on demand and delivered to the user community (see Figure 26 for the DESIS processing chain and the products).
Transcription Processor (L1A)
The Level 1A Processor collects information from the different data streams, extracts and interprets the information, and evaluates and derives additional information for long term storage. The functionality of the Level 1A Processor comprises the following tasks:
• Screening of the data includes the inspection (comparison to reference tables) of all status information, temperatures, currents and voltages, which are available in the VC (Virtual Channel) of the DESIS instrument data.
• Extraction and evaluation of DC (Dark Current) measurements before and after each datatake with 128 frames each. Mean and standard deviations of the DC frames are compared to reference values.
• Preparation of Earth data takes, which includes tiling of the data take (1024x1024 spatial pixels), annotating metadata for further processing and quicklook generation.
• Processing of calibration data takes and publishing to the off-line calibration process, which derives new calibration tables.
Systematic and Radiometric Conversion Processor (L1B)
The L1B processor corrects the data for systematic effects and converts them to physical at-sensor radiance or TOA values based on the calibration tables valid for the specific time period. The correction includes the following tasks:
• Dead pixel flagging
• Dark signal correction using linear interpolated dark signal values derived from the dark signal measurements before and after each datatake
• Non-linearity response correction using the valid calibration tables
• Spectral referencing using the spectral calibration database
• Radiometric referencing using the valid radiometric calibration table
• Generation of data quality indicators like abnormal pixel masks, band-to-band correlations, bad line and bad column mask.
• Radiometric conversion towards at-sensor radiance values
Output products are the TOA radiance data cubes, quality layers and metadata (e.g. orbit and attitude measurements, geometric calibration values, spectral channel information). The L1B product comprises all information for further processing.
Orthorectification Processor (L1C)
Orthorectification is the process to generate map conform products by removing geometric distortions caused by the sensor internal geometry, the satellite motion during data acquisition and the terrain related influences. The DESIS L1C processor produces orthoimages employing the technique of the rigorous model of DG (Direct Georeferencing) . The LOS (Line-of-Sight) model forms the basis of DG and is derived from the collinearity equation. LOS in this context means the view direction of each pixel at any instance of time.
The sensor internal geometry of the hyperspectral image will be extensively characterized in the laboratory by highly accurate measurements of the direction angles of single illuminated pixels (gravity center of the pixel) to the (adjusted) collimator axis. For each pixel the two angles on object side completely describe the internal camera geometry. This also includes (possible) geometric keystone effects. The mounting angles with respect to the attitude measurement system (body coordinate frame) are refined in the commissioning phase by geometric calibration procedures due to the gravity release and temperature influence. The star tracker measurements are combined by Kalman filtering with the angular measurements of the inertial measurement unit. These (unit) quaternions are finally transformed from the ECI (Earth Centered Inertial) frame to the ECR (Earth Centered Rotated) frame). A GPS provides the satellite position (and velocity) with a rate of 1 Hz. The attitude and position measurements are interpolated (e.g. Lagrange interpolation) for each scan line of the image
Within an iterative process the intersection points of the LOS vectors for each pixel and the DEM (Digital Elevation Model) is determined and leads to 3D points in object space.
The object points of the grid are expressed in an Earth bound Cartesian coordinate frame and are transformed to a user selectable map projection system [e.g. UTM (Universal Transverse Mercator) with the zone derived from the center coordinates of scene as well as the neighboring zones, geographic projection]. Within the map projection system image resampling is performed towards 30 m pixel spacing in case of UTM and 1 arcsec in case of Geographic projection. Different selectable resampling methods (e.g. nearest neighbor, bi-linear, cubic convolution) to generate the final orthorectified products are offered to the customer.
The geometric accuracy of the orthorectification is crucial for overlaying the data with existing data sets, maps, or in geographic information systems (GIS) and using them for evaluations like change detection, map updating, and others like enhanced atmospheric correction using terrain information (see chapter of Atmospheric Correction Processor). Therefore, an improvement of the LOS model shall be achieved by GCPs (Ground Control Points), which are extracted automatically from reference images of superior geometric quality using image matching techniques. As a global reference image database, the Landsat-8 panchromatic images with an absolute geometric accuracy of 12 m circular error at 90% confidence level and 14 m ground resolution is foreseen. 40)
In a first step, tie points between the uncorrected image and the reference image are determined by intensity based matching. 41) Supplementing the height values, interpolated from the DEM, to the found tie points a set of full qualified GCP are derived. In a second step, the GCP sets serve as input to improve the LOS model parameters within a least squares adjustment process. GCP outlier detection is included in the matching processes itself as well as in the least squares adjustment.
The feasibility of the approach to extract GCP from reference images for a refinement of the DG model within an operational environment has been successfully demonstrated at different projects. For example, the production of two European coverages by orthorectification of SPOT- 4 HRVIR, SPOT- 5 HRG and IRS P-6 LISS III scenes. Figure 27 shows the mosaic of the orthorectified scenes covering main parts of Europe. A relative geometric accuracy of 10 m RMSE w.r.t. the reference images have been achieved. About 450 GCP per 1000 km2 (about the size of one DESIS scene) have been extracted automatically.

Atmospheric Correction Processor (L2A)
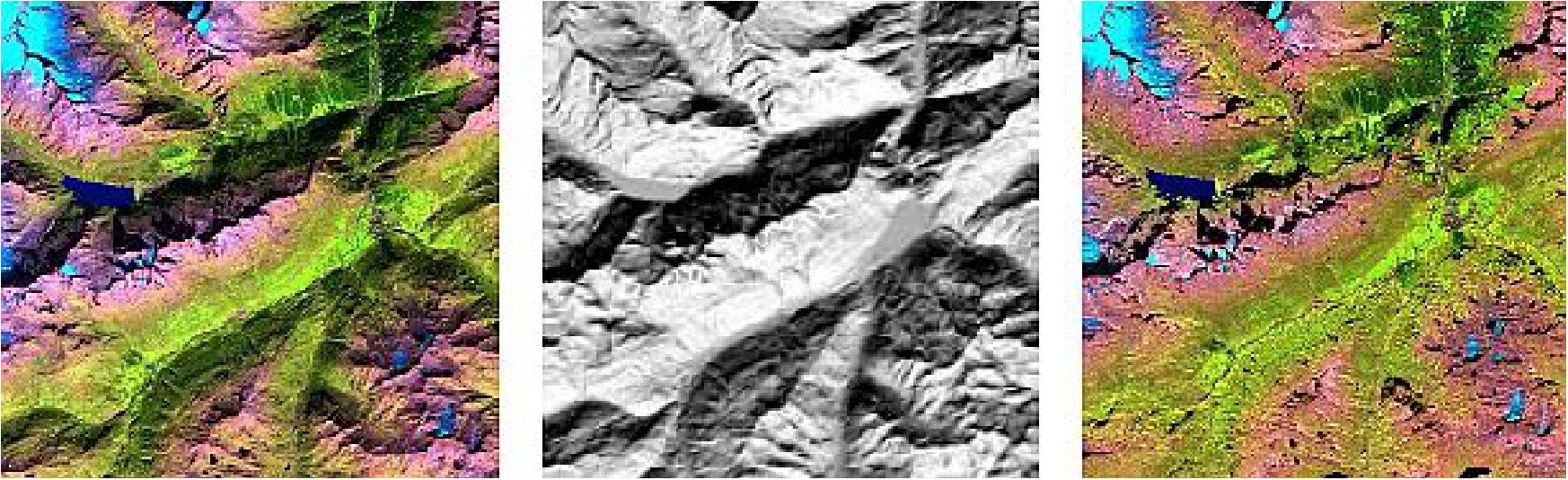
The DESIS L2A processor performs atmospheric correction of the images employing the well-known code of ATCOR (Atmospheric/Topographic Correction for Airborne Imagery). 42) 43) Input for the atmospheric correction processor is the L1C product. For the atmospheric correction over land a combined atmospheric and topographic processing is possible, provided the geometric absolute accuracy of the DESIS orthoimage is sufficient. A geometric accuracy better than one pixel size is required for this combined topographic / atmospheric correction in order to avoid artefacts caused by the inaccurate co-registered DEM and orthorectified image.
The MODTRAN-5.3.3 (moderate resolution atmospheric transmission) code is employed to model properties of the solar reflective spectrum (from 400 to 2500 nm). It supports a sufficiently high accuracy for the absorption simulation (water vapor, ozone, oxygen, carbon dioxide etc.). It also includes a rigorous treatment of the coupled scattering and absorption processes. Moreover, it offers a set of representative aerosol models (rural or continental, urban, maritime, desert). Therefore, MODTRAN-5.3.3 is selected to compile a database of atmospheric correction LUTs (Look-up Tables) with a high spectral resolution of 0.4 nm to enable the processing of the 2.55 nm (binned 10.21 nm) channel bandwidths of DESIS. This “monochromatic” or fine spectral resolution database has to be resampled with the DESIS channel filter curves. The advantage of compiling a “monochromatic” database is twofold. First it gives the possibility of quickly resampling it with updated spectral channel filter functions avoiding the necessity to run time-consuming radiative transfer calculations for the solar and view geometry pertaining to the acquired scenes and second to account for spectral smile corrections.
The atmospheric correction accounts for flat and rugged terrain (Figure 28), and includes haze/cirrus detection algorithms.
Output products will be the ground reflectance cube, maps of the aerosol optical thickness and atmospheric water vapor, and masks of land, water, haze, cloud, shadow and snow. 44) 45)
Inflight Spectral, Radiometric and Geometric Calibration:
Inflight calibration refers to all measurements and data analyses aiming to assess radiometric, spectrometric and geometric characteristics of the DESIS hyperspectral instruments in orbit. DESIS will undergo extensive characterization and calibration measurements before launch and will be re-calibrated after launch by updating the calibration tables. 46)
The DESIS calibration unit (see Figure29 for the layout and Figure 6 for the location of the calibration unit) consists of a number of different monochromatic and white LEDs with wavelengths between 400 and 1000 nm. The shape of the emitted light beam of the calibration unit allows monochromatic and spectrally broad-band illumination within the full spectrometer FOV. Pre-defined combinations of LED’s will be operated at the same time to simulate different illumination scenarios. The unit will be positioned in the spectrometer optical beam by the corresponding position of the pointing unit mirror. The switched-off calibration unit serves as dark reference.
• Rigorous pre-launch geometric & radiometric calibration (Ref. 6)
• On-board calibration unit:
- DSNU (Dark Signal Non-Uniformity) calibration before/after each collected scene.
- Periodic PRNU (Photo Response Non-Uniformity) calibration.
- Geometry Calibration using Single LEDs (Light-Emitting Diodes)
• Vicarious Calibration
- Planned every 30 – 60 days
- CEOS sites, RadCalNet autonomous instrumented sites
- Spectral diversity using ARSC (Alabama Remote Sensing Consortium) research fields and forests.
Data policy
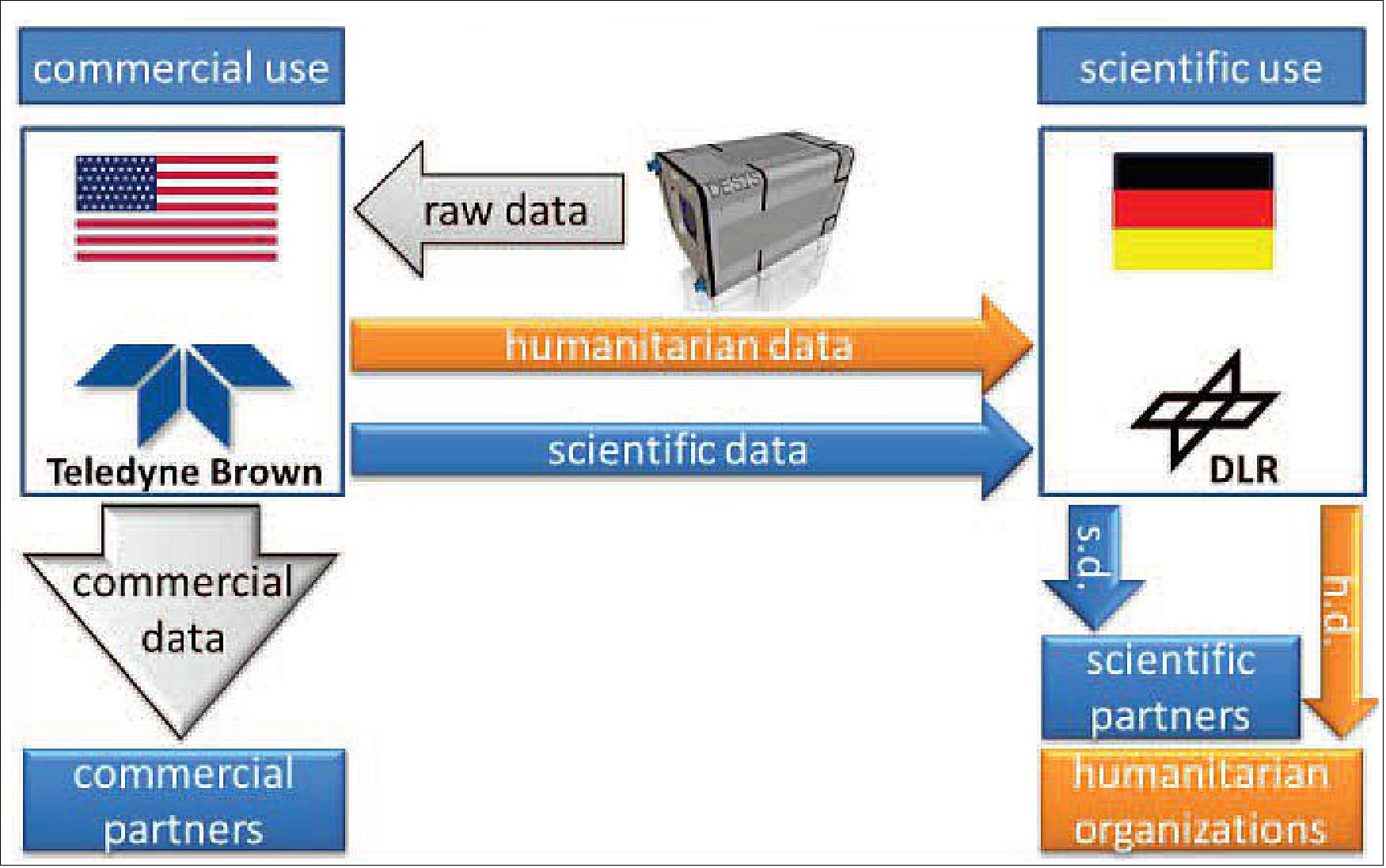
The DESIS instrument will be operated by Teledyne and only Teledyne will receive the raw data from the ISS. TBE has the exclusive right to license or transfer image data for commercial use. For scientific and humanitarian purposes, DLR has the right to task DESIS or request archived data. In these cases, and if no conflicts with the commercial activities appear, Teledyne will hand over the data to DLR. Therefore, Teledyne provides DLR a license to the instrument data DLR receives for scientific and humanitarian use. The parties will attempt to schedule DLR’s tasking requests so that tasking is generally balanced throughout the calendar year.
For scientific purposes only, DLR can share DESIS scientific data with other scientific organizations. Any commercial use of these instrument data is prohibited without Teledyne’s prior written permission. All end users of the instrument data provided to DLR for scientific use will be required to enter into a data license agreement among DLR and Teledyne. Scientific use includes:
• basic and application oriented research
• projects by national and international educational or research institutions or by governmental institutions
• development and demonstration of future applications for scientific and/or operational use and
• preparation and execution of government-funded education, research and development programs.
References
1) “DLR and Teledyne sign memorandum of agreement,” DLR, Oct. 2, 2013, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/
tabid-10081/151_read-8396/year-all/#gallery/12507
2) “DLR and US corporation TBE sign partnership for Earth observation instrument on board the ISS,” DLR, May 20, 2014, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx
/tabid-10081/151_read-10329/year-all/#gallery/14775
3) ”Teledyne and German Aerospace Center Formalize Commercial Space Imaging Partnership,” Teledyne Technologies, May 20, 2014, URL: http://teledyne.com/news/tdy_05202014.asp
4) ”Teledyne Awarded $15 Million Contract for Space-based Imagery,” Teledyne Technologies, July 20, 2015, URL: http://www.teledyne.com/news/tdy_07202015.asp
5) ”DLR and US corporation TBE sign partnership for Earth observation instrument on board the ISS,” DLR News, May 20, 2014, URL:http://www.dlr.de/dlr/en/desktopdefault.aspx
/tabid-10081/151_read-10329/#/gallery/14860
6) Ray Perkins, ”Teledyne’s DESIS Spectrometer on the ISS-based MUSES Platform,” Teledyne Technologies, , June 2, 2016, URL: https://forum.nasaspaceflight.com/
index.php?action=dlattach;topic=42229.0;attach=1404411;sess=0
7) Neil Humphrey, ”A View From Above: Imaging from the ISS,” Dec. 22, 2014, URL: http://possibility.teledynedalsa.com/a-view-from-above/
8) Kristine Rainey, ”Precision Pointing Platform For Earth Observations From The ISS,” NASA, Oct. 22, 2015, URL: http://www.nasa.gov/mission_pages/station/research/benefits/muses
9) ”MUSES on ISS,” ISS Remote Sensing, URL: http://www.spaceteacher.org
/ISS/iss_A2_files/iss-remote-sensing.pdf
10) Ray Perkins, David Krutz, Rupert Mueller, Emiliano Carmona, Robert Griffin, Lewis Graham, Randy Miller, ”Teledyne's Multi-User System for Earth Sensing (MUSES),” JACIE(Joint Agency Commercial Imagery Evaluation) Workshop, Fort Worth, Texas, USA, April 11-15, 2016, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/2016_JACIE-TDY_MUSES-3.pdf
11) R. Müller, J. Avbelj, E. Carmona, A. Eckardt, B. Gerasch, L. Graham, B. Günther, U. Heiden, J. Ickes, G. Kerr, U. Knodt, D. Krutz, H. Krawczyk, A. Makarau, R. Miller, R. Perkins, I. Walter, ”The new hyperspectral sensor DESIS on the Multi-Payload Platform MUSES installed on the ISS,” Proceedings of the XXIII ISPRS ((International Society for Photogrammetry and Remote Sensing) Congress, Prague, Czech Republic, July 12-19, 2016, Volume XLI-B1, pp: 461-467, URL: http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLI-B1/461/2016/isprs-archives-XLI-B1-461-2016.pdf
12) Jenny Howard, ”MUSES facility enables investigation opportunities for future users,” Phys.org, 21 June 2017, URL: https://phys.org/news/2017-06-muses-facility-enables-opportunities-future.html
13) ”New NASA Experiments, Research Headed to International Space Station,” NASA Release 17-052, June 3, 2017, URL: https://www.nasa.gov/press-release/
new-nasa-experiments-research-headed-to-international-space-station
14) ”SpaceX CRS-11,” Wikipedia, URL: https://en.wikipedia.org/wiki/SpaceX_CRS-11
15) ”CASIS and Teledyne Brown Engineering Announce Remote Sensing Challenge,” SpaceRef, 20 August 2018, URL: http://spaceref.com/news/viewpr.html?pid=52991
16) ”Teledyne’s MUSES Platform Achieves Full Operating Capability,” TBE News & Press Releases, 3 Oct. 2017, URL: https://tbe.com/news_and_events/press_release_view
/teledynes-muses-platform-achieves-full-operating-capability
17) Courtney E. Howard, ”Teledyne MUSES payload installed on ISS for precise Earth observation, imaging,” Intelligent Aerospace, 13 June 2017, URL: http://www.intelligent-aerospace.com/articles
/2017/06/teledyne-muses-payload-installed-on-iss-for-precise-earth-observation-imaging.html
18) ”Multiple User System for Earth Sensing Facility (MUSES),” NASA News, 12 July 2017, URL: https://www.nasa.gov/mission_pages/station/research/experiments/1282.html#publications
19) “DESIS - Hyperspectral Sensor for MUSES,” DLR, URL: http://www.dlr.de/os/en/desktopdefault.aspx/tabid-9294/16011_read-39367/
20) Ray Perkins, Rupert Mueller, Emiliano Carmona, Robert Griffin, Randy Miller, ”Imaging Spectroscopy Applications Using the DESIS Hyperspectral Instrument on MUSES,” JACIE(Joint Agency Commercial Imagery Evaluation) Workshop, Fort Worth, Texas, USA, April 11-15, 2016, URL: https://calval.cr.usgs.gov/wordpress/wp-content/
uploads/2016_JACIE-TDY_DESIS_Applications-1.pdf
21) ”DLR’s Earth Sensing Imaging Spectrometer to be sent to the ISS at the end of 2016,” UN-SPIDER Knowledge Portal, Nov. 25, 2015, URL: http://www.un-spider.org/news-and-events/
news/dlr%E2%80%99s-earth-sensing-imaging-spectrometer-be-sent-iss-end-2016
22) R. Müller, J. Avbelj, E. Carmona, A. Eckardt, B. Gerasch, L. Graham, B. Günther, U. Heiden, J. Ickes, G. Kerr, U. Knodt, D. Krutz, H. Krawczyk, A. Makarau, R. Miller, R. Perkins, I. Walter, ”The new hyperspectral sensor DESIS on the Multi-payload platform MUSES installed on the ISS,” The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B1, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic, URL: https://pdfs.semanticscholar.org/33c2/06f61834beb1604225916058231b9f46696c.pdf
23) R.Müller, M. Bachmann, K. Alonso, E. Carmona, D. Cerra, R. De los Reyes, B. Gerasch, H. Krawczyk, V. Ziel, U. Heiden, D. Krutz, ”Processing, validation and quality control of spaceborne imaging spectroscopy data from DESIS mission on the ISS,” Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Valencia, Spain, July 23-27, 2018
24) David Krutz, Ilse Sebastian, Ingo Walter, Burghardt Günther, Holger Venus, Michael Neidhardt, Ralf Reulke, Bernd Zender, Rupert Müller, Simone Arloth, Matthias Lieder, Ute Grote, Andreas Wojtkowiak, Friedrich Schrandt, ”DESIS - DLR Earth Sensing Imaging Spectrometer,” Proceedings of the 12th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, 06-10 May 2019
25) David Krutz, Rupert Müller, Uwe Knodt, Burghardt Günther, Ingo Walter,Ilse Sebastian, Thomas Säuberlich, Ralf Reulke, Emiliano Carmona, Andreas Eckardt,Holger Venus, Christian Fischer, Bernd Zender, Simone Arloth, Matthias Lieder,Michael Neidhardt, Ute Grote, Friedrich Schrandt, Samuele Gelmi andAndreas Wojtkowiak, ”The Instrument Design of the DLR Earth SensingImaging Spectrometer (DESIS),” 4 April 2019, DLR, URL: https://elib.dlr.de/127071/1/sensors-19-01622.pdf
26) H. Schwarzer, A. Eckardt, D. Krutz, R. Reulke, H. Venus, “Calibration and Performance Verification of Hyperspectral Systems,” 20. Workshop Farbbildverarbeitung, Wuppertal, Sept. 25-26, 2014, URL: http://spectronet.de/portals/visqua/story_docs/
vortraege_2014/140926_farbworkshop_wuppertal/140926_05_reulke_dlr.pdf
27) Andreas Eckardt, John Horack, Frank Lehmann, David Krutz, Jürgen Drescher, Mark Whorton, Mike Soutullo, ”DESIS (DLR Earth Sensing Imaging Spectrometer for the ISS-MUSES platform),” Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
28) G. Kerr, J. Avbelj, E. Carmona, A. Eckardt, B. Gerasch, L. Graham, B. Günther, U. Heiden, D. Krutz, H. Krawczyk, A. Makarau, R. Miller, R. Müller, R. Perkins, I. Walter, ”The Hyperspectral Sensor DESIS on MUSES: Processing and Applications,” Proceedings of the IEEE IGARSS (International Geoscience and Remote Sensing Symposium) Conference, Beijing, China, July 10-15, 2016
29) ”Hyperspectral instrument DESIS en route to International Space Station in 2018,” DLR, 10 April 2018, URL: http://www.dlr.de/dlr/en/desktopdefault.aspx/
tabid-10081/151_read-26810/year-all/#/gallery/30188
30) ”Hyperspectral Earth observation instrument DESIS sets off for the ISS,” DLR, 29 June 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10212/332_read-28665/#/gallery/30169
31) Information provided by David Krutz of DLR, Berlin.
32) Uta Heiden, Kevin Alonso Gonzalez, Martin Bachmann, Kara Burch, Emiliano Carmona, Daniele Cerra,Raquel de los Reyes, Daniele Dietrich, Uwe Knodt, David Krutz, Rupert Mueller, Mary Pagnutti,Rudolf Richter, Robert Ryan, Ilse Sebastian and Mirco Tegler, ”Data Validation of the DLR Earth Sensing Imaging Spectrometer,” IGARSS Virtual Conference, 26 September-2 October 2020, URL: https://elib.dlr.de/137304/1/IGARSS-2020_DESIS.pdf
33) ”DESIS Mission,” DLR Earth Observation Center, March 2020, URL: https://www.dlr.de/eoc/desktopdefault.aspx/tabid-13614
34) Kevin Alonso, Martin Bachmann, Kara Burch, Emiliano Carmona, Daniele Cerra, Raquel de los Reyes, Daniele Dietrich , Uta Heiden , Andreas Hölderlin, Jack Ickes, Uwe Knodt, David Krutz , Heath Lester, Rupert Müller, Mary Pagnutti, Peter Reinartz , Rudolf Richter, Robert Ryan, Ilse Sebastian and Mirco Tegler, ”Data Products, Quality and Validation of the DLR Earth Sensing Imaging Spectrometer (DESIS),” Sensors 2019, Volume 19, Published: 15 October 2019, pp. 4471-4515, Multidisciplinary Digital Publishing Institute (MDPI), https://doi.org/10.3390/s19204471 URL: https://elib.dlr.de/129609/1/sensors-19-04471.pdf
35) E. Carmona, K. Alonso-González, M. Bachmann, D. Cerra, D. Dietrich, U. Heiden, U. Knodt, D. Krutz, R. Müller, R. de los Reyes,M. Tegler,V. Ziel, ”First results of the DESIS imaging spectrometer on board the International Space Station,” Proceedings of the 39th annual IGARSS (International Geoscience and Remote Sensing Symposium) 2019, Yokohama, Japan, 28 July - 2August 2019
36) ”DESIS Mission,” 24 June 2019, URL: https://www.dlr.de/eoc/desktopdefault.aspx/tabid-13614/ , Information provided by Rupert Müller of DLR.
37) ”First processed images from DESIS hyperspectral Earth observation instrument,” DLR News, 02 October 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx
/tabid-10081/151_read-30091/year-all/#/gallery/32211
38) ”Installation of DLR's hyperspectral camera in space,” DLR News, 27 August 2018, URL: https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-29560/year-all/#/gallery/31849
39) ”Teledyne Soon to Begin Space-Based Imaging,” Teledyne Technologies Press Release, 2 July 2018, URL: http://www.teledyne.com/news-events/news-details?ID=323
40) ”Landsat 8 OLI (Operational Land Imager) and TIRS (Thermal Infrared Sensor),” USGS, https://lta.cr.usgs.gov/L8 (access 5th April 2016)
41) Rupert Müller, Thomas Krauss, Mathias Schneider, Peter Reinartz, ”Automated Georeferencing of Optical Satellite Data with Integrated Sensor Model Improvement,” Photogrammetric Engineering and Remote Sensing (PE&RS), Vol. 78, No 1, January 2012, pp: 61-74. DOI: http://dx.doi.org/10.14358/PERS.78.1.61, American Society for Photogrammetry and Remote Sensing. ISSN 0099-1112
42) R. Richter, ”A spatially adaptive fast atmospheric correction algorithm,” International Journal of Remote Sensing, Vol. 17, No 6, 1996, pp. 1201-1214
43) R. Richter, ”Atmospheric Correction Methods for Optical Remote Sensing Imagery of Land,” Advances in Environmental Remote Sensing Remote Sensing Applications. Taylor & Francis, London, 2011, pp: 161-172, ISBN 978-1-4200-9175-5
44) Aliaksei Makarau, Rudolf Richter, Rupert Müller, Peter Reinartz, ”Haze Detection and Removal in Remotely Sensed Multispectral Imagery,” IEEE Transactions on Geoscience and Remote Sensing, Volume: 52, Issue: 9, Sept. 2014, DOI: 10.1109/TGRS.2013.2293662 , URL: https://pdfs.semanticscholar.org/2f54/6f38ed335c94ffb0793470f412d8dea57733.pdf
45) Aliaksei Makarau, Rudolf Richter, Rupert Müller, Peter Reinartz, ”Spectrally consistent haze removal in multispectral data,” Proceedings of SPIE, Vol. 9244, 'Image and Signal Processing for Remote Sensing XX', 924422, October 23, 2014; doi:10.1117/12.2070025, Conference in Amsterdam, The Netherlands, Sept. 22-25, 2014
46) A. Hollstein, C. Rogass, K. Segl, L. Guanter, M. Bachmann, T. Storch, R. Müller, H. Krawczyk, ”EnMAP Radiometric Inflight Calibration, Post-Launch Product Validation, and Instrument Characterization Activities,” Proceedings of IEEE IGARSS (International Geoscience and Remote Sensing Symposium), Milan, Italy, July 26-31, 2015
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
MUSES Platform DESIS Launch Status of DESIS instrument Processing chain and products
References Back to Top