MATS (Mesospheric Airglow/Aerosol Tomography and Spectroscopy)
EO
Atmosphere
Imaging multi-spectral radiometers (vis/IR)
Land
MATS (Mesospheric Airglow/Aerosol Tomography and Spectroscopy) is a Swedish microsatellite mission operated by OHB (Otto Hydraulic Bremen) Sweden and Stockholm University's Department of Meteorology (MISU). Its objective is to observe and study mesospheric gases. Its novel method of limb imagining combined with tomographic retrieval can yield unique ways of probing atmospheric structures. The mission, launched in November 2022, has a planned design life of 2 years.
Quick facts
Overview
| Mission type | EO |
| Agency | SNSA |
| Mission status | Operational (nominal) |
| Launch date | 04 Nov 2022 |
| Measurement domain | Atmosphere, Land |
| Measurement category | Multi-purpose imagery (land), Atmospheric Winds |
| Measurement detailed | Land surface imagery, Wind profile (horizontal), Wind profile (vertical) |
| Instruments | Limb Imager, Nadir Imager |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Other |
| CEOS EO Handbook | See MATS (Mesospheric Airglow/Aerosol Tomography and Spectroscopy) summary |
Summary
Mission Capabilities
The primary sensors onboard MATS are Limb Imager and Nadir Imager.
Limb Imager observes NLCs (Noctilucent Clouds) and atmospheric glow from the Oxygen A-band.
As MATS measures these parameters from 75 to 110 km, it will analyse their wave structures with varying vertical and horizontal wavelengths (10 to global scale and 1 to 20 km for vertical respectively). This database will then build up a geographical and seasonal climatology of wave activity in the MLT region, which can then be applied to the various scientific objectives.
Nadir imager takes pictures of atmospheric band emissions from below the satellite. Due to sensitivity to background light, nadir imaging is restricted to the night side of the terminator.
Performance Specifications
MATS microsatellite orbits on a circular, sun-synchronous orbit at an altitude of 585 km.
Limb imager takes images in Ultraviolet (two wavelengths between 270 and 300 nm) and InfraRed (four wavelengths between 760 and 780 mm). This imager's FOV is 5.67º x 0.91º, translating to a swath of 250 km x 40 km.
Nadir imager is a Cooke triplet, with an entrance pupil of 15 mm, and a focal length of 50.6 mm. It possesses a 300 km swath width and a horizontal resolution of 10 to 20 kilometres.
Space and Hardware Components
The 50 kg microsatellite is based on an InnoSat spacecraft bus with minor mission-specific adaptations. This includes the accommodation of the limb imager's baffle system and complementing AOCS (Active Optical Fiber) sensor suite with fibre-optic gyros. Originally set to launch in 2019, the mission eventually launched in 2022. It was launched from Rocket Lab Launch Complex 1 (Māhia Peninsula) on an Electron launch vehicle.
MATS (Mesospheric Airglow/Aerosol Tomography and Spectroscopy) Mission
Spacecraft Launch Sensor Complement References
MATS is a microsatellite mission of Sweden, funded by SNSB (Swedish National Space Board), with the goal of conducting optical studies of mesospheric gases for two years. Spaceborne limb imaging in combination with tomographic retrieval opens exciting new ways of probing horizontal and vertical structures in the atmosphere. SNSB approved the project following a detailed project study by OHB Sweden, Stockholm University's Department of Meteorology (MISU), Omnisys Instruments and ÅAC Microtec. 1) 2) 3) 4)
Background
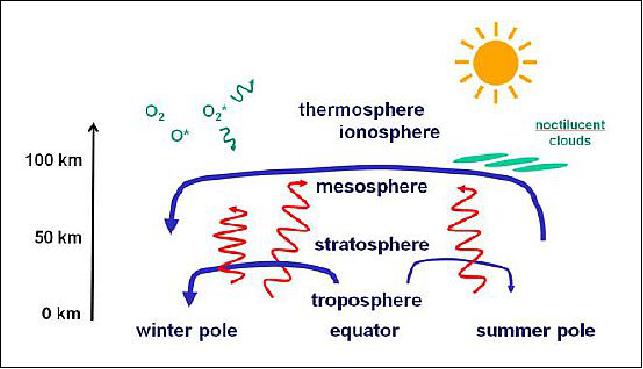
The Earth's MLT (Mesosphere and Lower Thermosphere), in the atmospheric altitude range of 50-130 km, are an important transition region with strong dynamical links to above and below. Despite this fact, this region has frequently been treated as a dividing line for atmospheric research. Traditional circulation models for the lower and middle atmosphere have the MLT region as their upper boundary, while thermospheric and ionospheric models have this region as their lower boundary. Only recently a broad interest has developed in "whole atmosphere" approaches that try to overcome this division. 5)
As for the middle atmosphere (below ~100 km), wave dynamics ranging from gravity waves to planetary waves provide strong coupling mechanisms between atmospheric regions. This is most evident in the MLT where upward propagating disturbances reach their maximum amplitudes and break, thus depositing momentum and energy onto the large-scale flow, and driving a global mesospheric circulation that is far from radiative equilibrium. This results in a strong coupling of MLT conditions to processes in the lower atmosphere. Prominent examples are recent discoveries of global coupling processes that govern the cold summer mesopause region. Proposed mechanisms for these teleconnections are based on the effect of lower atmospheric circulation on gravity wave filtering and, thus, on the dynamical forcing of the mesospheric circulation.
While the basic nature of the wave-driven circulation of the middle atmosphere is today understood, important mechanisms and interactions remain to be specified. The multiple roles of waves concerning local turbulent heating, vertical mixing and large-scale momentum deposition need quantification. Wave-wave interactions between different scales remain unclear, including the role of gravity waves in the in-situ generation of planetary waves in the MLT. In terms of climate trends, the MLT may be the atmospheric region where anthropogenic climate change produces its largest effect. In order to critically assess the significance of climatological trends observed in long-term datasets, it is necessary to better quantify the natural variability of the MLT. Again, wave activity is a major issue.
As for the upper atmosphere (above ~100 km), the MLT region is an important driver in terms of wave input. Over the last decade, a broad research field has emerged with a focus on this upward coupling. Resulting model developments are trying to overcome the division of the atmosphere into separate altitude regions and separate communities. Complementary to these model efforts, there has been growing observational evidence of thermospheric and ionospheric responses to dynamical processes in the lower and middle atmosphere. The role of tidal wave influences on the formation of ionospheric morphology has long been recognized.
Newer fields of research concern the effects of planetary waves and gravity waves. Recent model studies show that gravity waves may create large fluctuations in the 100 to 300 km region over spatial scales of tens to several hundred kilometres with temperature variations of 50 K or more and density variations as large as 10-25%. Additionally, the dissipation of gravity waves creates localized regions of heating and cooling over scales of several hundred kilometres. Before the gravity waves reach these altitudes, filtering takes place by the circulation systems at lower altitudes, thus creating fingerprints of the middle atmosphere in the thermosphere and ionosphere.
A recent review of wave effects on the thermosphere and ionosphere has been provided by Akmaev. 6) The author estimates that more than half of regular daily and seasonal variability in the thermosphere and ionosphere is forced from below. Akmaev strongly emphasizes the need for more data in the MLT region for the validation of models under development. As compared to the data-rich lower atmosphere and upper thermosphere, global data on the dynamics and variability of the MLT transition region are described as limiting factors for future scientific progress.
Various satellite missions perform today global observations of MLT structure and variability that have been analyzed in terms of wave activity on multiple scales.
- On the TIMED satellite (launched 2001), infrared limb emission measurements by SABER provide species and temperature distributions that have revealed middle atmosphere gravity waves and planetary waves. The TIDI instrument has provided limited gravity wave data in terms of airglow Doppler wind measurements.
- On ENVISAT (active in 2002-2012), infrared limb emission measurements by MIPAS cover the MLT and can provide large-scale structures that have been traced into the thermosphere. Measurements by the SCIAMACHY instrument have been analyzed in terms of MLT planetary wave structures in noctilucent clouds.
- On the AURA satellite (launched in 2004), measurements by the Microwave Limb Sounder (MLS) have provided large-scale wave activity based on composition, temperature and Doppler wind analysis.
- On the AIM satellite (launched in 2007), the CIPS instrument provides nadir imaging of noctilucent clouds (NLC) in the ultraviolet, which results in detailed horizontal maps of gravity wave structures.
- Also on Odin (launched 2001), MLT gravity wave structures have been analyzed from LC observations, based on recent tomography developments. Planetary waves have been retrieved from Odin's SMR instrument.
It is important to note that all of the above satellites only address a limited spatial range of the MLT gravity wave spectrum.
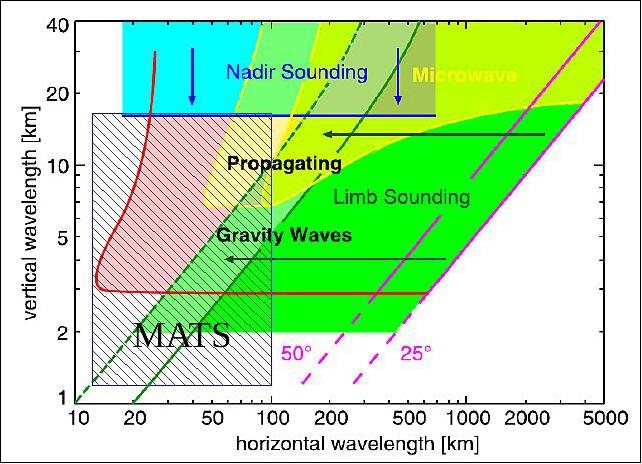
A summary of the current capabilities for the global measurement of gravity waves in the MLT was given by Preusse et al., 2008. 7) Figure 1 shows this summary together with the mapping capabilities of MATS. As can be seen, the MATS mission fills the current gap (given by the red area).
Scientific Objectives
The primary goal of MATS is to determine the global distribution of gravity waves and other structures in the MLT over a wide range of spatial scales. Primary measurement targets are airglow in the O2 Atmospheric band and sunlight scattered from NLC (Noctilucent Clouds). These emissions will be measured in an altitude range of 75-110 km, and are to be analyzed in terms of wave structures with horizontal wavelengths from tens of kilometres to global scales, and vertical wavelengths from 1 to 20 km. Over a period of two years, MATS will thus build up a geographical and seasonal climatology of wave activity in the MLT. This database will then be the starting point for scientific analysis in various directions.
Major scientific questions are (Ref. 4):
• What gravity wave spectra are present in the MLT, and how are these related to tropospheric sources and circulation 20 conditions in the lower and middle atmosphere? These questions are tightly connected to wave-wave interactions such as filtering by planetary wave activity and in-situ generation of secondary waves.
• To what extent does MLT wave activity affect processes in the thermosphere and ionosphere? As part of this objective, methods need to be developed that utilize the mapping of mesospheric wave activity as an input to studies of thermospheric variability.
• How can explicit and parameterized implementations of gravity waves be improved in atmospheric models? This relates back to the quest to reduce large uncertainties in current descriptions of wave sources, wave propagation, and wave interactions.
While the MATS gravity wave climatology will be the starting point for addressing these questions, complementary input from other sources will be important. This includes in particular meteorological reanalysis data, ionospheric monitoring systems, and other dedicated missions that provide data beyond the altitude range of the MATS measurements.
NLCs are one of the measurement targets of MATS. Since the pioneering days of NLC research, these clouds have transformed from a basic research object to a valuable research tool when it comes to remote sensing of the state of the MLT. Nonetheless, beyond using NLC as a convenient tracer for gravity wave studies, MATS will also address basic science questions concerning NLC in their own right:
• How are NLC affected by gravity waves and other transient processes in the MLT? This concerns both the microphysics of ice particles and the resulting evolution of observable cloud structures.
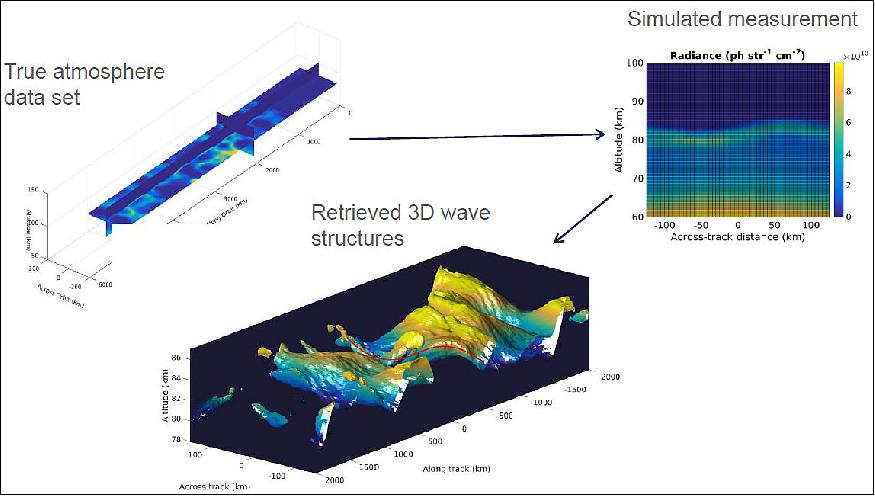
Measurement Concepts
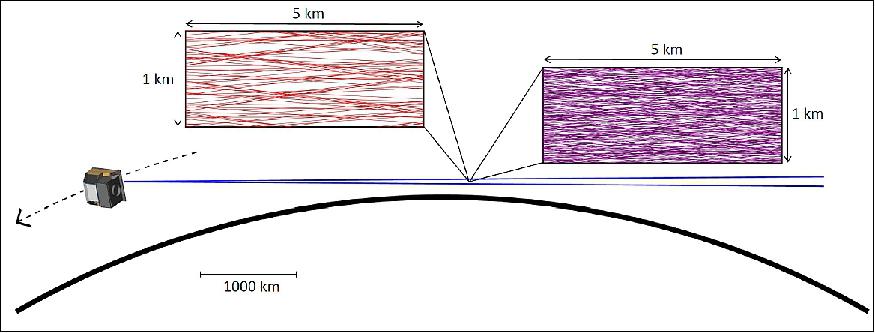
The above scientific objectives define the requirements for the measurements that MATS will perform. Tomography is the basis for obtaining three-dimensional information on spatial scales that are relevant for gravity wave studies. The tomographic retrieval needs input in terms of multiple line-of-sight observations through a given atmospheric volume. This is achieved by a limb imager that observes the atmosphere along the Earth's tangent direction, with a field of view covering tangent altitudes between 75 and 110 km, and 300 km across the track.
Figure 3 illustrates the observation geometry. In order to tomographically retrieve gravity wave information in the MLT, we need to utilize atmospheric emissions that are both sufficiently bright and susceptible to gravity wave activity. In the case of MATS, we utilize airglow in the O2 Atmospheric Band and scattering of sunlight by NLC. Both O2 Atmospheric Band airglow and NLC feature horizontal and vertical structures that are a direct response to gravity wave activity. As an additional benefit, both phenomena allow for a deeper analysis by applying spectroscopic techniques (Ref. 4).
On MATS, the O2 Atmospheric Band is measured using four spectral channels in the near-infrared between 750 and 775 nm. Measurements will be performed both during daytime (dayglow) and nighttime (nightglow). The tomographic analysis will convert measured limb radiances to volume emission rates as a primary step.
Combining the four channels, the subsequent spectroscopic analysis will utilize the rotational structure of the O2 Atmospheric Band 5 emission to infer temperature. At the same time, the total volume emission rate in the O2 Atmospheric Band can be analyzed in terms of odd oxygen densities:
- The Atmospheric Band nightglow provides a direct measure of atomic oxygen density.
- The Atmospheric Band dayglow, on the other hand, provides information about ozone density, which in turn is related to atomic 10 oxygen through photochemical equilibrium.
Gravity waves in the MLT can be inferred from these measurements by observing patterns in either airglow volume emission, odd oxygen, or temperature. Among these, analyzing gravity waves in the temperature field is most beneficial as the temperature is directly connected to the basic state of the atmosphere and as gravity wave momentum flux becomes accessible. To this end, temperature amplitudes as well as horizontal and vertical wavelengths need to be inferred from the measurements.
NLC is measured by MATS using two spectral channels in the ultraviolet at 270 and 305 nm. While imaging at one wavelength is sufficient for analyzing global NLC variations and local NLC structures, the use of two wavelengths gives the additional benefit of accessing particle sizes and ice content. To this end, the observed spectral dependence of the NLC signal is fitted in terms of an Ångström exponent and compared to numerical scattering simulations. For typical NLC particle sizes, observations in the ultraviolet are preferable as they push the scattering 20 deeper into the Mie regime, thus maximizing the amount of information that can be inferred from spectral measurements. In addition, wavelengths below 310 nm are efficiently absorbed by the stratospheric ozone layer and are therefore chosen to avoid complications due to upwelling radiation.
For MATS, the concrete wavelengths 270 nm and 305 nm are chosen both to ensure a sensitive retrieval in the NLC particle size range of interest and to minimize potential perturbations due to atmospheric emission features (airglow, aurora). The tomographic NLC data will be the basis for gravity wave analysis in 25 terms of horizontal wavelengths. The vertical structure of the NLC is strongly determined by the microphysics that governs cloud growth and sedimentation. The tomography will provide detailed insights into this vertical NLC evolution, including its possible modification by wave activity.
However, since the vertical structure of the narrow NLC layers is dominated by microphysics rather than dynamical processes, a retrieval of vertical wavelengths of gravity waves will not be feasible from the NLC data.
Table 1 summarizes the above retrieval products from the MATS limb measurements. The table also states the required precision and spatial resolution of these retrieval products.
Parameter | O2 Atmospheric Band dayglow/nightglow | NLC (Noctilucent Clouds) | |||
Emission rates | Temperature | O/O3 abundance | Brightness | Particle sizes | |
Temporal coverage | all seasons | all seasons | all seasons | summer | summer |
Geographical coverage | global | global | global | poleward of 45º | poleward of 45º |
Altitudes | 75-110 km | 75-110 km | 75-110 km | 80-86 km | 80-86 km |
Precision | 1-5% | 2-5 K (day) | 1-5% | 2-5% | 0.25 |
Retrieval resolution | 60 x 20 x 1 km | 60 x 20 x 1 km | 60 x 20 x 1 km | 60 x 10 x 0.5 km | 60 x 10 x 0.5 km |
In addition to these MATS limb measurements, a nadir imager will take pictures of the O2 Atmospheric Band emission from below the satellite. This provides complementary information on smaller spatial scales down to 10-20 km horizontal resolution, albeit restricted to the detection of structures rather than a detailed spectroscopic analysis. During sunlit (or moonlit) conditions, nadir measurements of airglow layers get drowned in background light from the lower atmosphere. Gravity wave data from the MATS nadir camera will therefore largely be restricted to moonless nighttime conditions. From the ground, nightglow imaging is a standard technique for local measurements of gravity waves in the MLT. An obvious advantage of satellite measurements is global coverage, however, this comes with the disadvantage of lacking temporal coverage at a given location. Also, nadir imaging from a moving satellite is subject to image smearing (motion blur), thus implying a restriction to strong features and short integration times.
Spacecraft
Original ideas for MATS date back longer than the current project development. The first mission concept was developed by Jacek Stegman and Donal Murtagh at Stockholm University in the 1990s, then under the name "Mesospheric Airglow Transient Signatures (MATS)". An important heritage for MATS is also the Odin satellite mission, concerning satellite, instrument, and operational concepts. 8) 9)
For the Optical Spectrograph and InfraRed Imager System (OSIRIS) on-board Odin, tomographic ideas were developed by Degenstein et al. 10) 11) In 2010, special "tomographic" scan modes were developed for Odin, covering a limited tangent altitude range of about 75-90 km with relatively high horizontal repetition rate. This measurement provided input to tomographic and spectroscopic retrievals that served as important tests for the MATS mission development. 12)
The current MATS satellite mission was developed in response to a call by the Swedish National Space Agency concerning "Innovative low-cost research satellite missions". MATS was selected after going through an initial Mission Definition Phase in 2014.
The MATS satellite is the first satellite based on the InnoSat platform that will also serve as a pilot mission in an intended program of small, low-cost research satellites funded by SNSB (Swedish National Space Board). The 50 kg microsatellite is planned to be launched in 2019 as an auxiliary payload into a 600 km dawn/dusk circular sun-synchronous orbit. There are two science instruments on board: the limb imager and the nadir imager (Ref. 5). 13)

The platform is based on the InnoSat spacecraft bus with only minor mission-specific adaptations. This includes the accommodation of the limb imager's baffle system and complementing the AOCS sensor suite with fibre-optic gyros. The latter is needed for fulfilling the pointing stability requirements stemming from the limb imaging requirements. Also, the star tracker sensor will be integrated into the limb imager's optical bench for minimizing the absolute pointing error of the limb imager.
The platform equipment is accommodated into one single module, called the Service Module, with the launch vehicle adapter on one side and a payload interface on the other side. One single, body-mounted solar panel with high-efficiency photovoltaic cells provides up to 174 W of power. The sizes of the solar panel as well as of the scientific payload are strictly constrained by the allowable volume for a piggyback launch.
The bus has been designed to utilize most of the available launcher volume available for a piggyback launch, to be optimized for a sun-synchronous orbit and to provide the maximum possible accommodation volume for the payload.. The size of the service module is kept to a minimum thanks to COTS electronics and a consistent single-string approach. This allows the payload and solar array to utilize most of the allowable launcher volume. Smart reconfiguration of these three modules will allow both earth-facing and space-facing payloads.
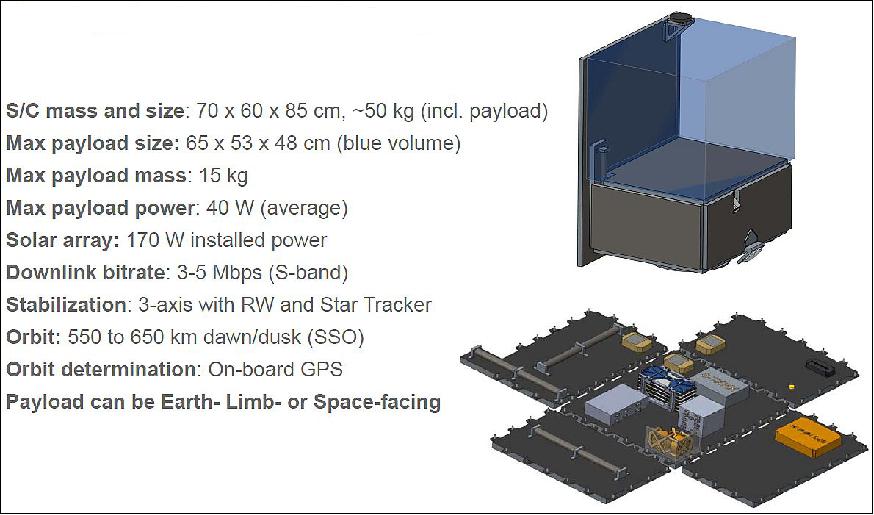
The satellite is three-axis stabilized using a star tracker and reaction wheels. Magnetic torque rods together with a magnetometer are used for wheel momentum control and for safe mode operations. GPS is used for orbit determination time correlation. The AOCS design relies heavily on heritage from the PRISMA formation flying satellites by OHB Sweden. The Data Handling Subsystem is based on a new generation of radiation-tolerant products of ÅAC Microtec including a 50 MHz OpenRISC processor, a SpaceWire communication infrastructure and a CCSDS TM/TC unit.
Parameter | Standard configuration | High power configuration |
Satellite mass | < 50 kg | < 55 kg |
Size | 70 x 65 x 85 cm | As Standard |
Payload mass | Up to 20 kg | As Standard |
Payload power | 40 W (SSO dawn/dusk) | 25-100 W depending on orbit |
Design lifetime | 2 years | As Standard |
Downlink data rate | 3-5 Mbit/s | As Standard |
Pointing performance | Max 0.05º absolute pointing error | As Standard |
Orbit determination | On-board GPS | As Standard |
Nominal attitude mode | Nadir/Forward-looking | As Standard |
Possible extensions to the standard configuration include the high power option but also a propulsion option using the Swedish green propellant (HPGP) flown on PRISMA. This system will provide approximately 120 m/s ΔV (constrained by the maximum tank size with the given accommodation volume).
Launch
A launch of the MATS microsatellite as a secondary payload on a Soyuz-2-1b rocket is scheduled for late 2019 from the Vostochny Cosmodrome in Eastern Russia.
Orbit: Sun-synchronous dawn-dusk orbit, altitude of ~585 km. The nominal local time of the equator passage is 6:30 and 18:30, thus providing a "near-terminator" orbit.
Sensor Complement
Limb Imager
In order to capture 3D wave structures in the MLT, MATS is designed to measure two phenomena occurring in the MLT region. NLCs (Noctilucent Clouds) and atmospheric airglow from the Oxygen A-band. This will be achieved by imaging the limb of the atmosphere at six different wavelengths, two in UV (between 270-300 nm) and four in IR (760-780 nm). The two UV channels will give information on small-scale structures using solar light scattered of NLCs, while the IR channels provide larger-scale structures, as well as atmospheric temperatures by measuring the emission from photochemically excited oxygen molecules.
In order to achieve the MATS measurement objectives (Table 1), four basic tasks have been central to the limb instrument design: imaging quality, sensitivity (signal-to-noise ratio), spectral separation, and straylight suppression. Boundary conditions for the design are defined by the InnoSat satellite platform in terms of mass, dimensions, power, etc. (Table 2).
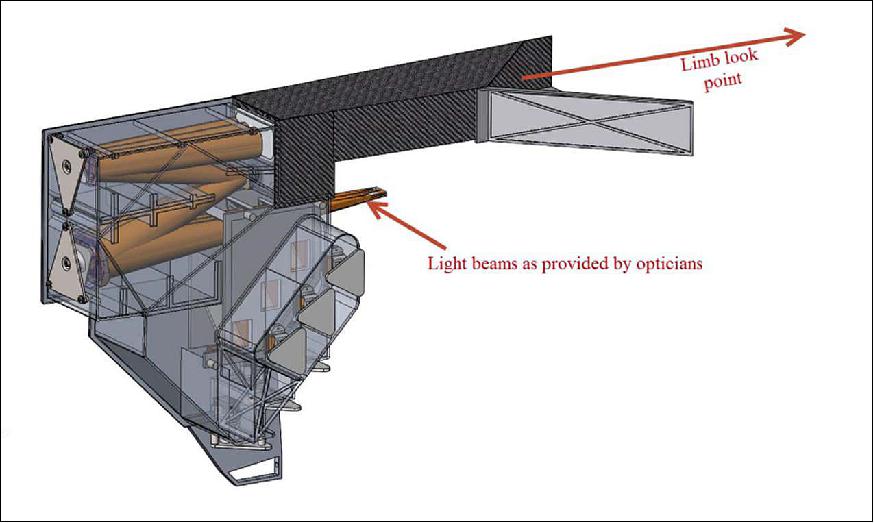
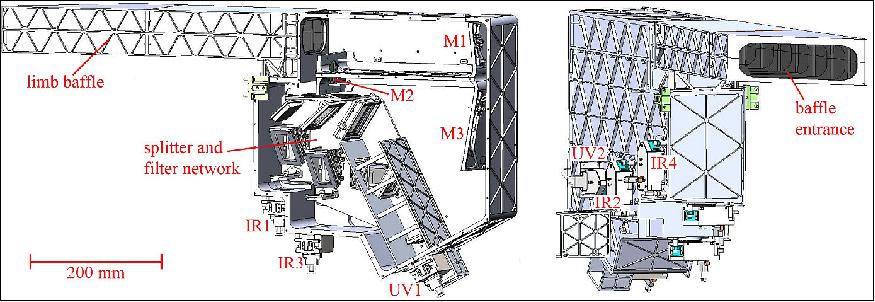
To perform limb imaging, an off-axis 3-mirror telescope based on free-form mirrors is used. The limb of the atmosphere is imaged onto the 6 CCD channels, where wavelength separation is achieved using a combination of dichroic beam splitters, and narrowband filters.
The image detection is based on advanced CCD sensors with readout electronics that allow for flexible pixel binning and image processing. A critical challenge for the limb instruments is stray light. Sources of stray light are both direct sunlight and the bright lower atmosphere that is less than 1º from the nominal field of view. Telescope optics and interior instrument setup are carefully designed to suppress stray light effects. Of particular importance is the layout of the limb baffle system that is optimized by making use of the entire available length of the InnoSat platform.
Tomographic and spectroscopic retrievals are based on a co-analysis of limb data from the six spectral channels and from different locations along the orbit. This requires sequences of limb images together with appropriate information about pointing and geolocation. Thus the need for image co-analysis defines the requirements on fields of view, instrument alignment, the accuracy of pointing reconstruction, and image quality.
Telescope:
The limb instrument is based on a single off-axis three-mirror reflective telescope (f/D = 7.3) with a FOV of 5.67° x 0.91°. The mirrors are manufactured by Millpond ApS with fully free-form surfaces. They are made of aluminium with active surfaces defined using diamond turning. The free-form design was optimized to achieve diffraction-limited imaging. Inter-mirror distances and angles were chosen to satisfy the linear-astigmatism-free condition. Linear astigmatism is the dominant aberration of off-axis reflecting telescopes and must be eliminated to obtain a wide field of view. 15) A summary of the properties of the limb telescope is found in Table 3.
Type | Linear-astigmatism-free off-axis three-mirror reflective |
Mirrors | diamond turned aluminium with protective UV coating, 3 nm rms |
FOV (Field of View) | 5.67º x 0.91º (250 km x 40 km) |
Entrance pupil | 9.6 cm2 |
Focal length | 260 mm |
f / D | 7.3 |
Aperture stop | located on the secondary mirror |
Splitter and filter network:
Following the telescope is a network of dichroic beam splitters and thin-film interference filters that are used to achieve the desired spectral selection. As the first element, a beamsplitter BS-UV-IR reflects wavelengths below 345 nm towards the UV part of the instruments, while longer wavelengths are transmitted towards the infrared part. Figure 8 shows the detailed distribution of spectral channels and optical elements. Each of the instrument's six channels uses a broadband filter to remove out-of-band signals, followed by a narrowband filter that ultimately defines the wavelengths transmitted to the image sensors. In addition, two folding mirrors are used to keep the optical components within the InnoSat platform envelop. Optical tests performed at the breadboard and prototype level show that the resolution required for the IR channels is fulfilled, while more careful mirror alignment is needed for the flight model to meet the imaging requirements of the UV channels.
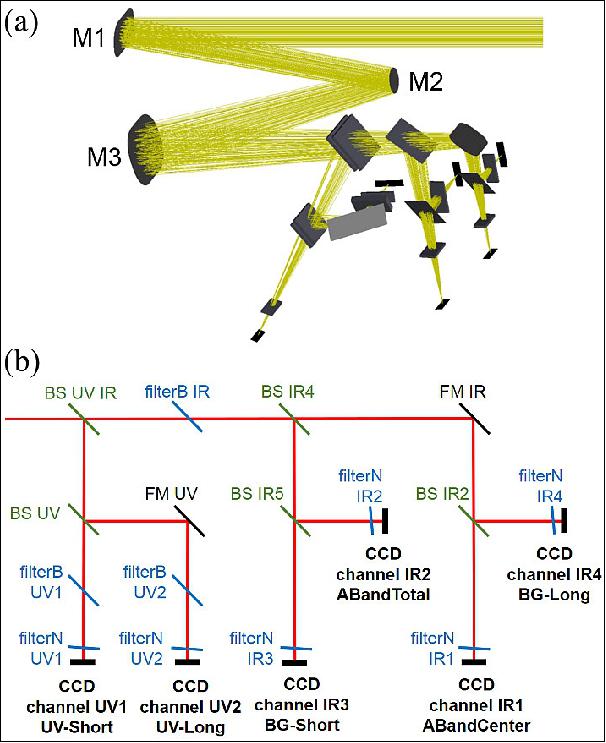
Designation | Central wavelength | Bandwidth | Tangent altitudes | Imaging resolution | Binning resolution | SNR |
UV1-short | 270 nm | 3 nm | 70-90 km | 0.2 km | 0.2 x 5 km | 100 |
UV2-short | 304.5 nm | 3 nm | 70-90 km | 0,2 km | 0.2 x 5 km | 100 |
IR1-ABand-center | 762 nm | 3.5 nm | 75-110 km | 0.4 km | 0.4 x 10 km | 500 |
IR2-ABand-total | 763 nm | 8 nm | 75-110 km | 0.4 km | 0.4 x 10 km | 500 |
IR3-BG-short | 754 nm | 3 nm | 75-110 km | 0.8 km | 0.8 x 50 km | 500 |
IR4-BG-long | 772 nm | 3 nm | 75-110 km | 0.8 km | 0.8 x 50 km | 500 |
Nadir | 762 nm | 8 nm | nadir | 10 km | 10 x 15 km | 100 |
Baffle design:
One of the major design drivers for the limb instrument has been to minimize the impact of straylight from outside the FOV. This task is critical considering that the bright lower atmosphere is only 1-2° below the nominal mesospheric FOV. Central to the straylight handling is a long (>650 mm) baffle in front of the primary telescope mirror. To minimize the reflections inside the baffle, it is coated internally with Vantablack S-VIS, which has a reflectivity of less than 0.6% in the wavelength regions relevant for MATS. Furthermore, the limb housing and all mounting structures are coated using black nickel (Ref. 14). During most of the mission, the baffle entrance will be in the shadow of the solar panel. However, during some high-latitude summer conditions, the sun can illuminate satellite structures near the baffle. In order to minimize the risk of straylight entering the baffle, a plane mirror is placed in front of the baffle entrance (Figure 4). As opposed to (black) surfaces that can scatter incident light in uncontrolled ways, this "baffle mirror" has been designed to reflect sunlight away from the instrument.
Since the MATS limb telescope lacks a field stop, Lyot stops are used in front of each image sensor. In addition, all sensors are deeply embedded in the structure. These measures remove the critical paths from the primary and secondary mirrors. Furthermore, the inter-mirror distances were chosen to be as large as possible while still fitting into the available payload volume. By doing so, the subtended angles between the mirrors were minimized, which, in turn, minimizes the throughput of scattered light emanating from outside the nominal field of view. To verify the performance of the stray-light suppression, a combination of experimental testing and modelling of the instrument in Zemax Opticstudio have been carried out (Ref. 14). From this, attenuations better than 10-5 are generally obtained for angles exceeding 1.5°, thus fulfilling the requirements for the mission.
Readout electronics:
To record the incoming light, all channels use passively cooled back-lit CCD sensors (Teledyne E2V-CCD42-10). The data from each CCD are read out by a CCD Readout Box (CRB) with an instrument onboard computer (OBC) to handle the data. Two power and regulation units, located in the instrument electronics box together with the OBC, provide adjustable voltages for CCD operation, and multiplex the control of the CRB settings and the data readout, for up to four imaging channels. The OBC then compresses the image (if applicable) before handing it over to the Innosat platform which manages the satellite downlink. The nominal image format will be compressed 12-bit JPEG images, while full-resolution uncompressed image readout is also available for in-flight calibration purposes.
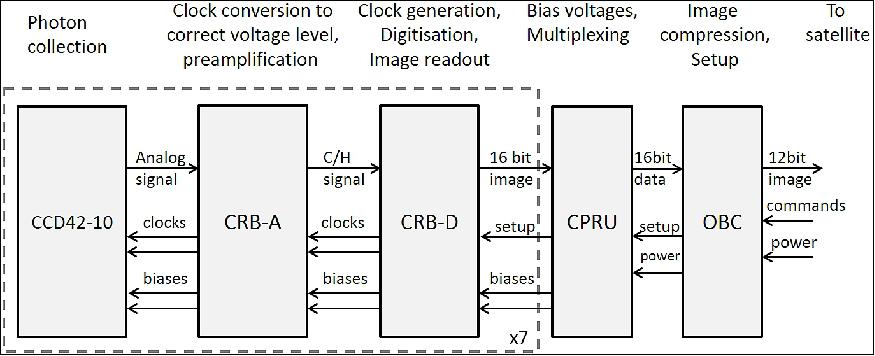
The CCD provides 512 x 2048 image pixels. The field of view of each limb channel occupies a wide (along the limb) and short (in the vertical direction) area of interest. CCD readout implies a vertical shift of the image rows. To minimize the number of moving parts in the satellite no shutter is used in the instrument. As a consequence, the image rows continue being exposed during the readout shifting, resulting in image smearing. The effect of this is minimized by fast readout (using binning and skipping rows outside the region of interest) as well as correcting for smearing in post-processing.
To minimize noise and interference in CCD readout, the read-out electronics are composed of two parts, analogue and digital. The analogue box (CRB-A) is located in the immediate vicinity of the CCD. The function of CRB-A is to generate the necessary clock signals for the CCD and to provide signal conditioning for the CCD output signal. The clock signals are generated in the digital box (CRB-D, located with the rest of the instrument electronics) with standard logic voltage level, and are converted to the voltages needed by the CCD inputs by dedicated gate drivers. The signal from the CCD is pre-amplified and handled by a clamp-and-hold circuit. The amplified analogue signal is passed over a differential connection to the CRB-D, where it is digitized by a 16-bit Analog-to-Digital Converter (ADC) and stored in memory, available for transfer to the OBC. CRBD uses a Field-Programmable Gate Array for generating the multiple clocks for the CCD and sending the image to the OBC.
Since the different MATS channels and science modes have different requirements for the final image, the CRB firmware is flexible, allowing changing multiple settings of the readout, such as integration time, region of interest on the CCD, horizontal and vertical binning, or CCD output amplifier selection.
Exposure of the CCD to radiation in orbit will affect the dark current performance, which can be counteracted by adjusting the bias and clock voltages for the CCD in the power regulation unit. Hot pixels may develop on the CCD due to radiation. These can be excluded from binning, by flagging the columns that contain them as bad.
Performance measurements were carried out on a prototype version of the readout electronics, showing readout noise of about 50 e- per CCD pixel using the high signal mode amplifier on the CCD. This can be further reduced to under 20 e- per pixel by adjusting the pre-amplification gain and by using the low signal mode amplifier. 16)
Albedo photometers:
Each of the two albedo photometers consists of a two-lens telescope based on standard N-BK7 lenses, providing a field of view of 6°. In front of the telescope, a pair of interference filters is placed on each photometer to discriminate against unwanted wavelengths. Baffles minimize straylight from outside the field of view. The detector is a Hamamatsu S1223-01 Si PIN photodiode. The system measures upcoming radiation at 759-767 nm and 752.5-755.5 nm, corresponding to the limb imager channels IR2-ABand-total and IR3-BG-short, respectively (Table 4). The signal-to-noise ratio is better than 100.
Nadir Imager
In addition to the limb imager, a nadir imager takes pictures of atmospheric band emissions from below the satellite. This provides complementary information on smaller spatial scales, albeit restricted to a single spectral channel. Because of the nadir instruments susceptibility to the background light of the lower atmosphere, the nadir imaging will be restricted to the night-side of the terminator. The nadir instrument is basically a wide-angle camera. Data are taken one row at a time, covering a horizontal distance of about 300 km swath width. In contrast to the limb instrument, simpler lens optics is used to image nadir structures on a CCD sensor. As for the limb imager, it is as well a critical design driver to baffle the nadir imager from direct sunlight.
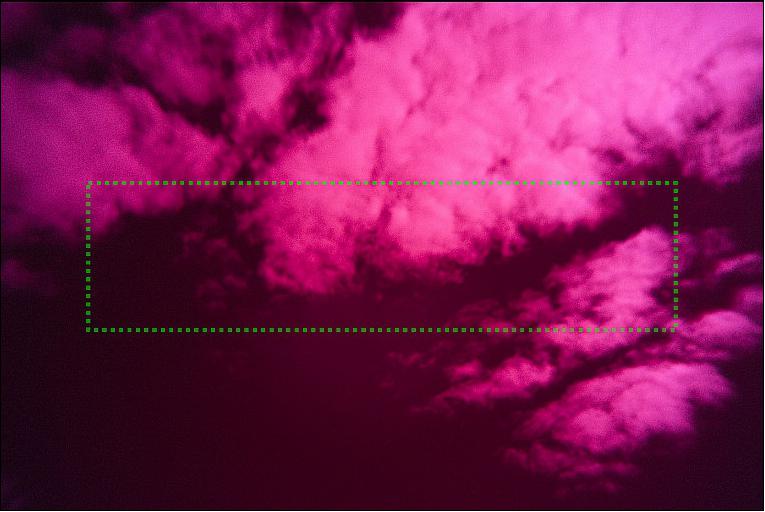
The nadir camera is a Cooke triplet with an entrance pupil of 15 mm, and an effective focal length of 50.6 mm. Its field of 15 views is 24.4° x 6.1°. From orbit, this covers an area of at least 200 km across the track and 50 km along the track at a 100 km altitude. The design can resolve 10 x 10 km features at this altitude. Additional degradation occurs in the along-track direction due to smearing caused by the satellite movement during the exposure and read-out phase. The figure shows a sample image taken by a prototype nadir camera from the ground. In orbit, the nadir measurements aim at nighttime conditions with the Sun located at least 10° below the horizon for a ground-based observer. However, under these conditions, the satellite will be fully illuminated by the Sun, and straylight handling is thus essential for the nadir camera. Similar to the limb instrument, in addition to being mounted in the shadow of the solar panel, efficient straylight suppression for the nadir camera is achieved by a baffle with a black coating on the inside.
The readout of the nadir camera uses the same readout electronics as the limb instrument, albeit operated in a different readout scheme. In order to limit motion blur, nightglow images are taken with an exposure time no longer than 1 s. Exposures are taken and the CCD is read out at a rate sufficient to obtain overlapping images along the ground-track of the satellite. The result is a continuous nightglow image swath of width 200 km along the night-part of the orbit.
In summary, the MATS instrumentation will be able to provide the first global map of gravity wave structures with horizontal wavelengths < 100 km, and hence close an important gap in the current observational capabilities.
Closing this gap will allow for an increased understanding of wave activity in the middle atmosphere, with important implications for the modelling of this region in weather, climate and whole atmosphere models. Hence, with a rather small instrument, a large impact can be made on the science of the middle atmosphere.
References
1) Peter B. de Selding, "Sweden Strokes Check for 50-Kilogram Science Satellite," Space News, Oct. 23, 2014, URL: http://www.spacenews.com/article/civil-space/42287sweden-strokes
-check-for-50-kilogram-science-satellite
2) Jörg Gumbel and the MATS Science Team, "Mesospheric Airglow/Aerosol Tomography and Spectroscopy (MATS): a satellite mission on 3D structures and waves," 41st Annual European Meeting on Atmospheric Studies by Optical Methods Stockholm, Sweden, August 17-21, 2014
3) "OHB Sweden and ÅAC Microtec to develop the InnoSat platform and implement its first mission named MATS," ÅAC Microtec, Press Release, Feb. 19, 2015, URL: http://www.mynewsdesk.com/se/aaac-microtec-ab/pressreleases/ohb-
sweden-and-aaac-microtec-to-develop-the-innosat-platform
-and-implement-its-first-mission-named-mats-1119420
4) Jörg Gumbel, Linda Megner, Ole Martin Christensen, Seunghyuk Chang, Joachim Dillner, Terese Ekebrand, Gabriel Giono, Arvid Hammar, Jonas Hedin, Nickolay Ivchenko, Bodil Karlsson, Mikael Kruse, Anqi Li, Steven McCallion, Donal P. Murtagh, Georgi Olentšenko, Soojong Pak, Woojin Park, Jordan Rouse, Jacek Stegman, Georg Witt, "The MATS Satellite Mission − Gravity Waves Studies by Mesospheric Airglow/Aerosol Tomography and Spectroscopy," Atmospheric. Chemistry & Physics Discussions, EGU, Discussion started: 17 December 2018, https://doi.org/10.5194/acp-2018-1162, URL: https://www.atmos-chem-phys-discuss.net/
acp-2018-1162/acp-2018-1162.pdf
5) N. Larsson, R. Lilja, J. Gumbel, O. M. Christensen, M. Örth, "The MATS Microsatellite Mission -Tomographic Perspective on the Mesosphere," Proceedings of the 4S (Small Satellites, System & Services) Symposium, Valletta, Malta, May 30-June 3, 2016, URL: http://congrexprojects.com/docs/default-source/16a02
_docs/4s2016_final_proceedings.zip?sfvrsn=2
6) R. A. Akmaev, "Whole atmosphere modeling: Connecting terrestrial and space weather," Reviews of Geophysics, Vol. 49, Issue 4, December 2011, DOI: 10.1029/2011RG000364
7) Peter Preusse, Stephen D. Eckermann, Manfred Ern, "Transparency of the atmosphere to short horizontal wavelength gravity waves," Journal of Geophysical Research, Volume 113, Issue D24, 27 December 2008, URL: http://onlinelibrary.wiley.com/doi/10.1029/2007JD009682/full
8) D. Murtagh, U. Frisk, F. Merino, M. Ridal, A. Jonsson, J. Stegman, G. Witt, P. Eriksson, C. Jimenez, G. Mégie, J. de La Noëë, P. Ricaud, P. Baron, J.-R. Pardo, A. Hauchecorne, E. J. Llewellyn, D. A. Degenstein, R. L. Gattinger, N. D. Lloyd, W. F. J. Evans, I. C. McDade, C. Haley, C. Sioris, C. von Savigny, B. H. Solheim, J. C. McConnell, K. Strong, E. H. Richardson, G. W. Leppelmeier, E. Kyrölä, H. Auvinen, L. Oikarinen, "An overview of the Odin atmospheric mission," Canadian Journal of Physics, Vol. 80, No 4, 2002, pp. 309-319, URL: http://www.atmosp.physics.utoronto.ca/people/
strong/papers/R11_2002_Murtagh_CJP.pdf
9) E. J. Llewellyn, N. D. Lloyd, D. A. Degenstein, R. L. Gattinger, S. V. Petelina, A. E. Bourassa, J. T. Wiensz, E. V. Ivanov, I. C. McDade, B. H. Solheim, J. C. McConnell, C. S .Haley, C. von Savigny, C. E. Sioris, C. A. McLinden, E. Griffioen, J. Kaminski, W. F. J. Evans, E. Puckrin, K. Strong, V. Wehrle, R. H. Hum, D. J. W. Kendall, J. Matsushita, D. P. Murtagh, S. Brohede, J. Stegman, G. Witt, G. Barnes, W. F. Payne, L. Piché, K. Smith, G. Warshaw, D. -L. Deslauniers, P. Marchand, E. H. Richardson, R. A. King, I. Wevers, W. McCreath, E. Kyrölä, L. Oikarinen, G. W. Leppelmeier, H. Auvinen, G. Mégie, A. Hauchecorne, F. Lefèvre, J. de La Nöe, P. Ricaud, U. Frisk, F. Sjoberg, F. von Schéele, and L. Nordh, "The OSIRIS instrument on the Odin spacecraft," Canadian Journal of Physics, Vol. 82, No 6, 2004, pp: 411-422, https://doi.org/10.1139/p04-005
10) Douglas A. Degenstein, Edward J. Llewellyn, and Nicholas D. Lloyd, "Volume emission rate tomography from a satellite platform," Applied Optics ,Vol. 42, Issue 8, pp: 1441-1450, 2003, https://doi.org/10.1364/AO.42.001441
11) D. A. Degenstein, E. J. Llewellyn, N. D. Lloyd, "Tomographic retrieval of the oxygen infrared atmospheric band with the OSIRIS infrared imager," Canadian Journal of Physics, 2004, Vol. 82, No. 7 : pp. 501-515, https://doi.org/10.1139/p04-024
12) Kristoffer Hultgren, Jörg Gumbel, "Tomographic and spectral views on the lifecycle of polar mesospheric clouds from Odin/OSIRIS," Journal of Geophysical Research: Atmospheres Volume 119, Issue 24, 26 November 2014, https://doi.org/10.1002/2014JD022435
13) N. Larsson, R. Lilja, M. Örth, S. Söderholm, J. Köhler , R. Lindberg, J. Gumbel, "InnoSat and MATS – An Ingenious Spacecraft Platform applied to Mesospheric Tomography and Spectroscopy, URL: https://www.dlr.de/iaa.symp/Portaldata/49/Resources
/dokumente/archiv10/pdf/1002.pdf
14) Arvid Hammar, Ole Martin Christensen, Woojin Park, Soojong Pak, Anders Emrich, Jan Stake,"Stray light suppression of a compact off-axis telescope for a satellite-borne instrument for atmospheric research," Proceedings of SPIE, Volume 10815, 'Optical Design and Testing VIII', 108150F (5 November 2018), https://doi.org/10.1117/12.2500555, Event: SPIE/COS Photonics Asia, 2018, Beijing, China
15) Seunghyuk Chang, "Linear astigmatism of confocal off-axis reflective imaging systems with N-conic mirrors and its elimination," Journal of the Optical Society of America A Vol. 32, Issue 5, pp. 852-859 (2015), https://doi.org/10.1364/JOSAA.32.000852
16) G. Giono, G. Olentšenko, N. Ivchenko, O. M. Christensen, J. Gumbel, U. Frisk, A. Hammar, I. Davies, L. Megner, "Characterisation of the analogue read-out chain for the CCDs onboard the mesospheric airglow/aerosol tomography and spectroscopy (MATS)," Proceedings of SPIE, Volume 10698, 'Space Telescopes and Instrumentation 2018: Optical, Infrared, and Millimeter Wave,' 106984Y (2018), https://doi.org/10.1117/12.2313732, Event: SPIE Astronomical Telescopes + Instrumentation, 2018, Austin, Texas, United States
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).