MetOp (Meteorological Operational Satellite Program of Europe)
EO
ESA
Atmosphere
Ocean
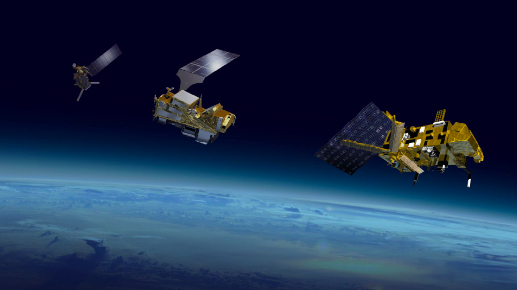
The Meteorological Operational satellite program (MetOp) is a collaboration between the European Space Agency (ESA) and the European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT) with the aim to provide satellite observation and data services for weather prediction and climate monitoring. MetOp provides temperature and humidity profiles on the atmosphere, as well as wind speed and direction above the ocean data for Numerical Weather Prediction (NWP). MetOp-A, launched in 2006 and retired in 2021, began the MetOp series, followed by the launches of MetOp-B and -C in 2012 and 2018, respectively.
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, CNES, NOAA, EUMETSAT |
| Mission status | Operational (nominal) |
| Launch date | 19 Oct 2006 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Sea ice cover, edge and thickness, Soil moisture, Snow cover, edge and depth, Ocean surface winds, Atmospheric Winds |
| Measurement detailed | Cloud top height, Precipitation Profile (liquid or solid), Ocean imagery and water leaving spectral radiance, Aerosol absorption optical depth (column/profile), Cloud cover, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Cloud imagery, Cloud liquid water (column/profile), Land surface imagery, Upward short-wave irradiance at TOA, Upward long-wave irradiance at TOA, Aerosol effective radius (column/profile), Fire fractional cover, Earth surface albedo, Downwelling (Incoming) solar radiation at TOA, Short-wave Earth surface bi-directional reflectance, Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, CH4 Mole Fraction, N2O (column/profile), HNO3 (column/profile), Sea-ice cover, Snow cover, Soil moisture at the surface, Wind speed over sea surface (horizontal), Cloud top temperature, Normalized Differential Vegetation Index (NDVI), Snow water equivalent, Sea-ice thickness, Atmospheric stability index, Volcanic ash, Fraction of Absorbed PAR (FAPAR), CO2 Mole Fraction, Sea-ice type, Wind profile (vertical), Height of tropopause, Temperature of tropopause, Downward short-wave irradiance at Earth surface, Long-wave Earth surface emissivity, Upwelling (Outgoing) spectral radiance at TOA, CO2 Total Column, CO Total Column, SO2 Total Column |
| Instruments | SEM (POES), AMSU-A, AVHRR/3, A-DCS3, S&R (NOAA), MHS, HIRS/4, GOME-2, GRAS, IASI, ASCAT |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Space environment, Scatterometers, Atmospheric chemistry, Communications, Data collection, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See MetOp (Meteorological Operational Satellite Program of Europe) summary |
Related Resources
Summary
Mission Capabilities
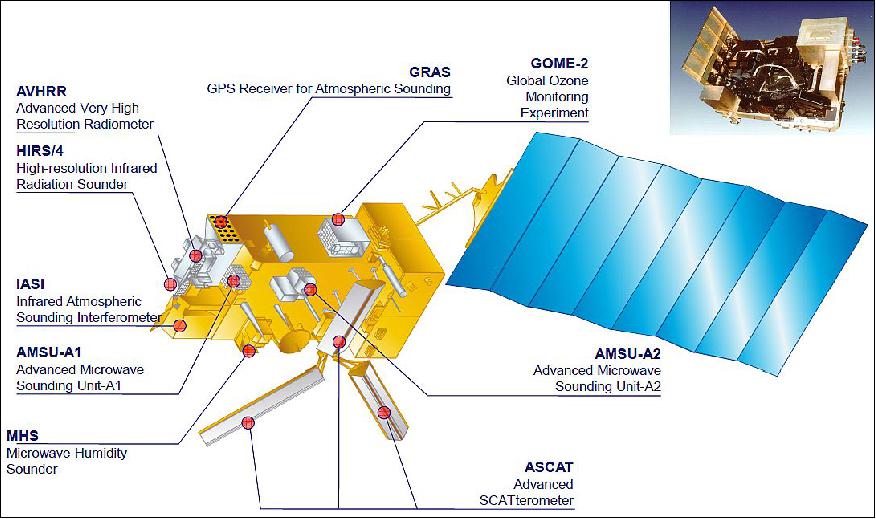
The MetOp satellites are identical in design, each carrying 11 instruments which provide data for weather predictions. Infrared Atmospheric Sounding Interferometer (IASI) measures infrared radiation emitted from Earth’s surface to derive data on humidity and atmospheric temperature profiles in the troposphere and lower stratosphere. Microwave Humidity Sounder (MHS) measures microwave radiation emitted from Earth’s surface to acquire measurements at various altitudes of atmospheric humidity, including rain, snow, hail, sleet, and temperature. Global Navigation Satellite System Receiver for Atmospheric Sounding (GRAS) operates as an atmospheric-sounding instrument that supplies atmospheric soundings of the temperature and humidity of the Earth’s atmosphere.
Advanced Scatterometer (ASCAT) measures wind speed and direction over the ocean. Global Ozone Monitoring Experiment-2 (GOME-2) is a spectrometer that collects light arriving from the Sun-illuminated Earth’s atmosphere or a direct view to the Sun and decomposes it into its spectral components to derive a detailed picture of the atmospheric content and profile of certain atmospheric components. Advanced Microwave Sounding Units (AMSU-A1 and AMSU-A2) measure scene radiance in the microwave spectrum. High Resolutions Infrared Radiation Sounder (HIRS/4) is a 20-channel radiometric sounder measuring radiance in the infrared spectrum. Data from the AMSU instruments and HIRS/4 are used in conjunction to calculate the global atmospheric temperature and humidity profiles from the Earth’s surface to the upper stratosphere as well as provide precipitation and surface measurement. Advanced Very High Resolutions Radiometer (AVHRR/3) provides day and night imaging of land, water and clouds and measures sea surface temperature, ice, snow, and vegetation cover. Space Environment Monitor (SEM-2) is a spectrometer that provides measurements to determine the intensity of the Earth’s radiation belts and the flux of charged particles at the satellite altitude.
Performance Specifications
The most advanced instrument on MetOp is IASI which can measure the profile of temperature in the troposphere and lower stratosphere with an accuracy of 1 K, a vertical resolution of 1 km the lower troposphere and an horizontal sampling of 25 km. It is able to measure the profiles of water vapour in the troposphere with an accuracy of 10% on relative humidity for the same resolutions and the total amount of ozone with an accuracy of 5% and a horizontal sampling of 25 km.
MetOp satellites are in sun-synchronous orbits at an altitude of 824 km with an orbital inclination of 98.7°. The orbital period of these satellites is 101.4 minutes with a 29-day repeat cycle.
Space and Hardware Components
The MetOp series was developed by a consortium of European companies led by the main contractor European Aeronautic Defence and Space-Astrium (EADS-Astrium), France. The satellites consist of the payload Module (PLM), the Service Module (SVM) and a large solar array. The PLM accommodates the whole suite of instruments and associate support equipment. The SVM provides the main satellite support functions, such as command and control, communications with the ground, pour and orbit control and propulsion.
The mission is still in operation with MetOp-B and MetOp-C still in orbit. MetOp-A was retired at the end of 2021 with 15 years of operations. The MetOp satellites will be succeeded by the MetOp-Second Generation (MetOp-SG) mission from the mid-2020’s onwards.
MetOp (Meteorological Operational Satellite Program of Europe)
Launch Mission Status Sensor Complement EPS Overview References
MetOp-A is Europe's first polar-orbiting (LEO) satellite dedicated to operational meteorology. The MetOp program was originally planned as a much larger satellite concept, called POEM (Polar-Orbit Earth-Observation Mission), a successor mission series to ERS-1/2 on the Columbus Polar Platform (PPF design).
However, this idea was abandoned at the ESA Ministerial Council in Granada, Spain, in 1992. Instead, Envisat and MetOp were born. Full approval of the EPS (EUMETSAT Polar System) program was granted in September 1998. The MetOp program is planned as a series of three satellites to be launched sequentially over an observational period of 14 years, starting in 2006 with MetOp-A (2010, 2014), it represents the space segment of EPS. 1) 2)
Overview of EPS
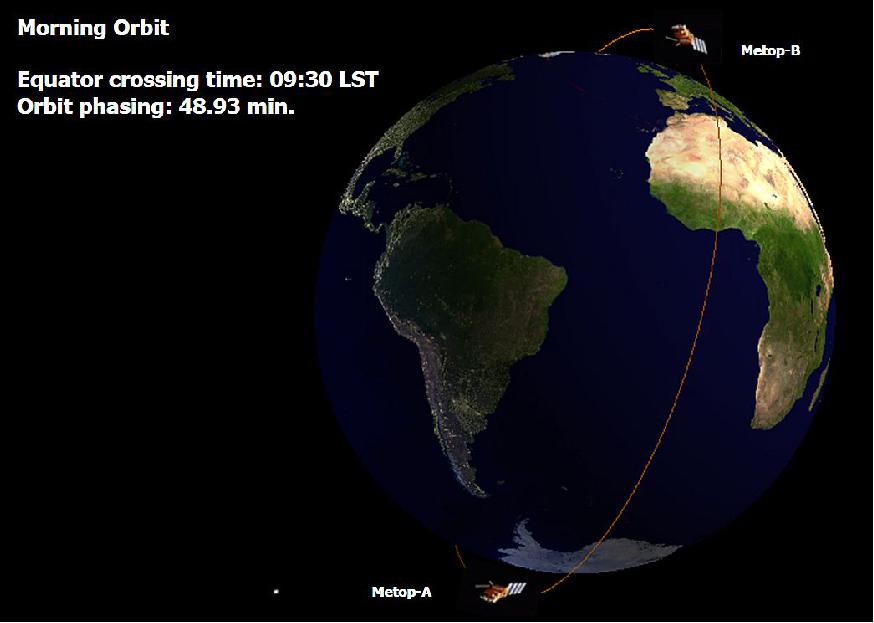
The EUMETSAT Polar System (EPS) consists of the ESA-developed MetOp (Meteorological OPerational) series of spacecraft and an associated ground segment for meteorological and climate monitoring from polar, low Earth orbit, providing "morning" service for operational meteorology. Within the framework of international agreements, the NOAA POES series will continue to provide the "afternoon" service.
The MetOp series, although an independent development, is complementary to: a) the NOAA POES system, b) the EUMETSAT/ESA MSG (Meteosat Second Generation) system, and c) the ESA ENVISAT system, where MetOp completes the mission objectives of the original POEM-1 mission.
Background: European needs for meteorological observations in polar ("morning" and "afternoon") orbits have been generously provided by NOAA S/C and payloads (including some instruments developed in Europe) over the last quarter century. The EPS (EUMETSAT Polar System) is the European contribution to the joint European/US operational polar system, through IJPS (Initial Joint Polar System). A cooperation agreement between NOAA and EUMETSAT was signed in November 1998. The EPS and POES systems form together the IJPS to provide global meteorological data from the series. With EPS, EUMETSAT is committed to take over the morning orbit service from NOAA. On the other hand, NOAA will continue to provide the POES series afternoon service. Both services are coordinated and integrated, on the basis of exchange of data, instruments and operational services
The prime objectives of the EPS MetOp mission series are as follows:
• To ensure continuity and availability for operational purposes of polar meteorological observations from the "morning" orbit to the global user community
• To provide enhanced monitoring capabilities (complimentary to ENVISAT) to fulfil the requirements to study the Earth climate system as expressed in a number of international cooperative programs such as: GCOS (Global Climate Observing System), IGBP (International Geosphere and Biosphere Program), and WCRP (World Climate Research Program). The aim is to provide continuous, long-term data sets.
EPS is an end-to-end system composed of a space segment and a full ground segment (see Figure 60). The third satellite in this series, MetOp-3, is not formally part of IJPS, because its planned launch date falls already into the era of the US NPOESS (National Polar-orbiting Operational Environmental Satellite System) era, representing in itself the merged US POES (civil) and DMSP (military) series.
Within the European framework, ESA is developing MetOp-A, the EUMETSAT procurement of MetOp-2/3 missions is under the responsibility of a joint ESA/EUMETSAT team. EUMETSAT is also directly responsible for the delivery of the following payloads: MHS, IASI, Argos/ADCS, SEM, AMSU-A, HIRS/4, and AVHRR/3. The last four payloads are contributed by NOAA under the IJPS agreement: CNES develops the IASI instrument with joint funding from EUMETSAT, and provides the Argos/ADCS, and in addition, part of the S&RSAT (Search & Rescue) auxiliary payload. EUMETSAT is responsible for the definition of the overall EPS system, the development and operations of the ground segment, and for the operation of the space segment.

Naming Convention of MetOp Satellites
(the information was provided by the head of the EUMETSAT spacecraft team on Oct. 31, 2006)
The various naming of the spacecraft is due to the way the program development evolved:
• MetOp-1 is the first flight unit built, MetOp-2 the second, MetOp-3 the third.
• Due to programmatic reasons at system level, a decision was taken to fly MetOp-2 first.
• In order to avoid confusion, for the purposes of operations, the MetOp-2 flight model is referred to operationally as MetOp-A since it is the first satellite in-orbit. The international satellite designator of COSPAR is: 2006-044A, and a NORAD catalog ID is: 29499. The MetOp administration messages downlinked on HRPT/LRPT contains the COSPAR identifier (left-justified).

MetOp-A Satellite
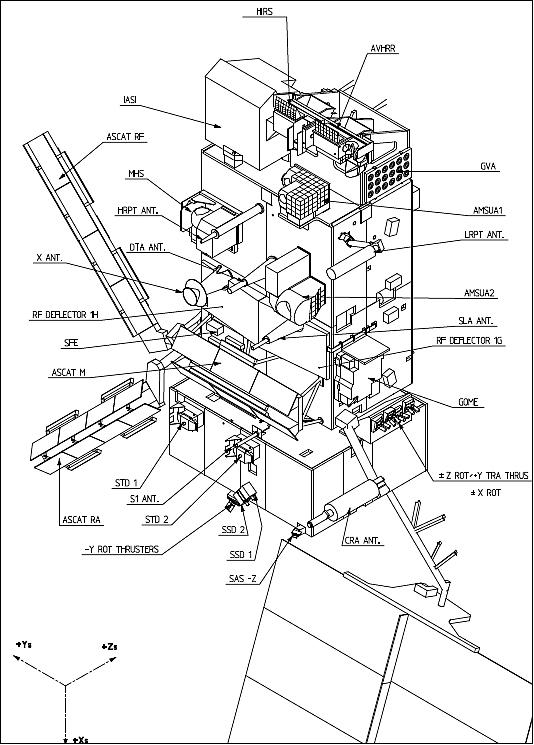
The overall architecture of the MetOp-A spacecraft comprises two largely independent modules, namely SVM (Service Module) and PLM (Payload Module). 3) 4) 5) 6) 7)
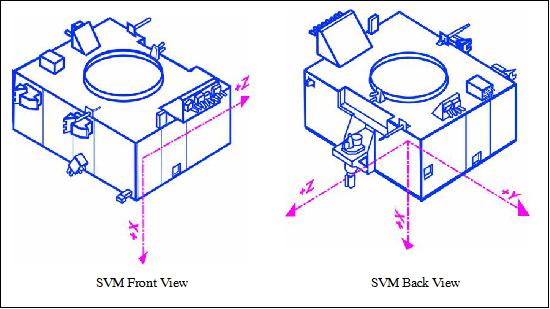
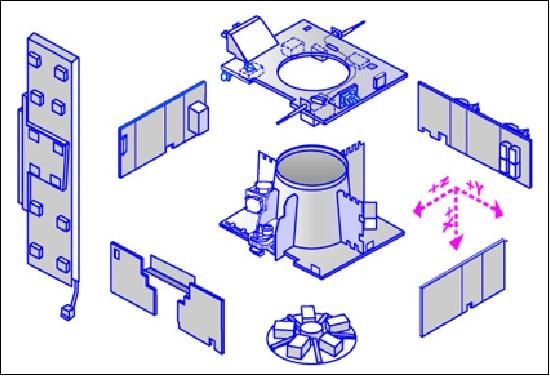
• SVM provides the main satellite support/service functions. The SVM provides all the standard service functions of a S/C, like: attitude and orbit control, propulsion, power generation, and the on-board data handling and distribution systems. The SVM design is based on the SPOT MK3 bus (used on the SPOT series, ERS-1/2 and Helios-1A and 1B S/C). SVM is a box-shaped structure interfacing with the launch vehicle and the PLM as illustrated in Figure 5.
• PLM provides accommodation and supporting subsystems (data handling, power, communications) to the payload complement. The instruments and antennas are mounted on the external panels, while most of the electronics systems are accommodated inside the PLM.
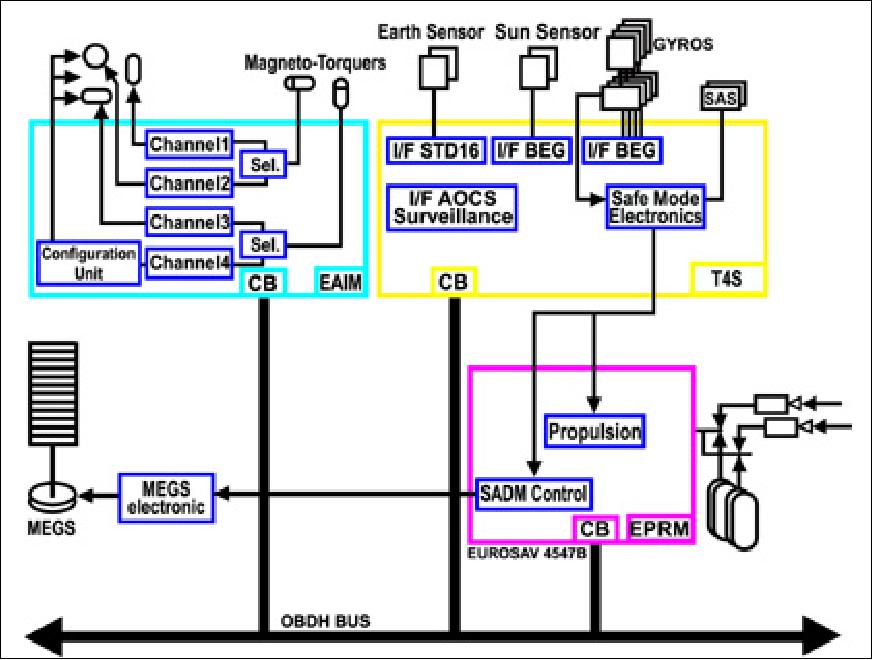
The S/C overall size is: 6.2 m x 3.4 m x 3.40 m (launch configuration) and 17.6 m x 6.7 m x 5.4 m (on-orbit configuration). The S/C is three-axis stabilized. The AOCS (Attitude and Orbit Control Subsystem) is in charge of the automatic 3-axes control of the satellite attitude, the orbit control for which the needed thrust impulses are provided by the propulsion subsystem. Attitude sensing is provided by digital Earth sensors for roll and pitch, by sun sensors for yaw, and by four independent two-axis gyros (two being in cold redundancy).
Actuation is provided by three 40 Nms reaction wheels, by two magnetotorquers (MAC) able to generate a 315 Am2 magnetic moment, and by the associated monitoring and command unit (EAIM). In addition, the propulsion subsystem works in blow-down mode; it includes four pressurized tanks of hydrazine. Two branches of eight 23.5 N thrusters are used. The pointing knowledge is: 0.07º (x-axis), 0.10º (y-axis), 0.17º (z-axis).
The overall S/C mass at launch is 4085 kg, including 316 kg of hydrazine. Single sided solar arrays provide a power of 3.890 kW (EOL), the average power over one orbit is 1.81 kW (EOL). Five 40 Ah batteries provide power during eclipse periods. The mission design life is 5 years. The prime S/C contractor is EADS Astrium SAS (France), major co-contractors are EADS Astrium GmbH, Germany (PLM), Alenia, Italy, and EADS Astrium Ltd., UK.
Propulsion subsystem: The eight thrusters, shown in Table 2, allow the generation of torque in all three axis and of propulsion in the ±Y axis. A graphical view of the thruster pair configuration is given in Figure 3. The Cartesian reference frame indicated in the figure depicts the MetOp satellite body frame of reference in which –Z points toward the Earth center. All the eight thruster configurations as described in Table 2 are shown in detailed in Figure 3. The rectangular box on the left in Figure 3 is a rough representation of the MetOp spacecraft that complements the thruster configuration schematics on its right. The green patches signify the location of the thruster pairs grouping on the spacecraft. 8)
Thruster No | Thruster Function | ||
Prime | Redundant | Torque | Thrust |
1 | 2 | +Y |
|
3 | 4 | -Y |
|
5 | 6 | -X |
|
7 | 8 | -Z | -Y |
9 | 10 | +Z | -Y |
11 | 12 | +X |
|
13 | 14 | +Z | +Y |
15 | 16 | -Z | +Y |
Each thruster is designed to deliver a nominal thrust of 22.7 N at the beginning of life. Currently (2015), each thruster on MetOp-B is providing on average 17.5 N of thrust. The thrust provided is in the form of pulses and are designed to operate at 8 Hz. During the propulsion phase, the imbalance in the torque due to changes in the center of mass will cause one of the propulsion thrusters to pulsate less than the other. A similar imbalance in the torque and thrust applies to the slew and anti-slew maneuvers as well. Throughout the maneuver phase, the attitude control thrusters are actively controlled by the AOCS to correct the attitude pointing due to torque imbalance created by the propulsion and coupled thrusters.

Parameter | Value | Parameter | Value |
Mass of SVM | 1380 kg | Mass of solar array | 255 kg |
Mass of PLM | 1214 kg | Mass of fuel | 316 kg |
Mass of payload | 920 kg | Overall mass of S/C | 4085 kg |
Power of instruments | 885 W (average) | Power of PLM | 491 W (average) |
Power SVM | 437 W (average) | Total power consumption | 1.81 kW (average) |
RF communication: An omnidirectional S-band coverage provides TT&C support (uplink 2 kbit/s, downlink 4 kbit/s). Instrument data is downlinked in X-band at a rate of 70 Mbit/s. Onboard storage capacity of 24 Gbit (solid state recorder with a data rate of 70 Mbit/s) is provided. In addition to onboard recording and X-band downlink capabilities, MetOp supports the real-time broadcast of instrument data to local authorized users by the following means:
• LRPT (Low-Rate Picture Transmission) links with 72 kbit/s in VHF-band for selected instrument data.
• AHRPT (Advanced High-Rate Picture Transmission) links with 3.5 Mbit/s in L-band. The new AHRPT service (a WMO standard) enables regional users to receive all data relevant to their area in real time. Users operating existing HRPT stations will have to modify their stations to receive the "Advanced" MetOp data.
The provided VHF low-rate digital direct broadcast service replaces the old analog APT (Automatic Picture Transmission) service of NOAA, employing data compression (modified JPEG compression scheme) to ensure high-quality images. The digital LRPT service retains the VHF frequency and bandwidth of the APT service, but provides three channels of AVHRR data at the full instrument spatial and radiometric resolution.
Data Type | Frequency Domain | Modulation Scheme | Data Rate |
TT&C uplink | S-band, 2053.4 MHz | NRZ/PSK/PM | 2 kbit/s |
TT&C downlink | S-band, 2230 MHz | SP-L/PSK/PM | 4 kbit/s |
Global data dump | X-band, 7.750-7.900 GHz | QPSK | 70 Mbit/s |
LRPT downlink | VHF-band, 137.1 MHz | QPSK | 72 kbit/s |
AHRPT downlink | L-band, 1701.3 MHz | QPSK | 3.5 Mbit/s |
The EPS Ground Segment includes all the ground facilities required to support the orbiting MetOp satellites and the EPS mission, including both normal and degraded mission modes. Its objectives are:
• To ensure that the satellites perform their mission nominally
• To perform the ground operations to fulfil the global mission, acquiring and processing the global data received from the NOAA and MetOp satellites and disseminating the processed data to the Eumetsat member states. This includes product quality control, data archiving, and provision of user services.
• To perform all the ground operations to support the local data-access mission (HRPT/LRPT)
• To support NOAA for global data acquisition and telemetry, tracking and control during blind orbits of the NOAA ground segment (and on request for specific operations)
• To support the space environment monitoring and data-collection missions.
The core ground segment provides the following functions at the different sites:
• Central Site, at Eumetsat headquarters in Darmstadt, Germany, includes all the functions for monitoring and controlling the satellite and the ground segment. Included are the generation of the centrally extracted products and their dissemination.
• The Polar Site, at Svalbard (latitude 78ºN), hosts the CDA (Control & Data Acquisition) station that receives the MetOp recorder dump every orbit and command the satellite. The CDA receives also NOAA satellite data dumps when they are beyond their own stations.
• The BUCC (Back-Up Control Center) site, close to Madrid, Spain, was created in case of major problems with the central site.
The EPS ground segment includes the Eumetsat multi-mission dissemination system (EUMETCast) for near-realtime delivery to users of the global data and products derived from the MetOp data for the morning orbit and NOAA data for the afternoon orbit.
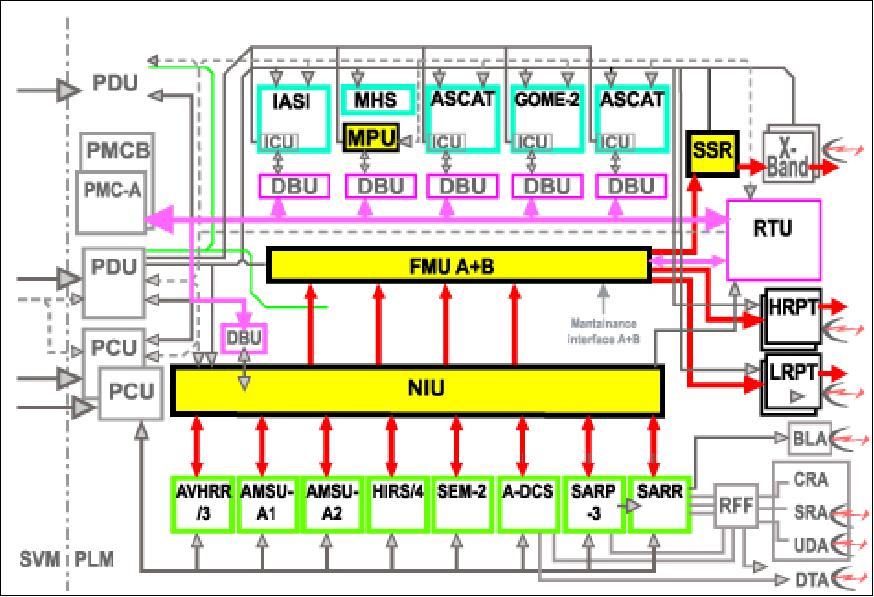
Onboard data handling: On the MetOp spacecraft command and control concept is implemented separately to measurement data handling. However, since this concept doesn't work for the NOAA-provided instruments (AVHRR/3, HIRS/4, AMSU-A, and SEM-2), a dedicated NIU (NOAA Interface Unit) has been developed to adapt the NOAA interfaces to European standards. The NIU performs command and control through a dedicated Instrument Control Unit (ICU) and collects measurement data through a DSP (Digital Signal Processor). It also compresses the AVHRR channels. To allow for selective encryption in the FMU (Formatting and Multiplexing Unit), the NIU provides measurement data to the FMU via four distinct data streams:
• NIU (NOAA Interface Unit)
• MHS (Microwave Humidity Sounder) Protocol conversion Unit (MPU)
• FMU
• SSR (Solid State Recorder)
General onboard data handling employs the CCSDS protocols. A selective encryption capability is used to ensure the commercial and data-denial needs of EUMETSAT and NOAA, respectively. Spacecraft operations are being performed by EUMETSAT with the Kiruna ground station serving as prime.
The PLM (Payload Module) command and control function is performed through:
• PMC (Payload Module Computer). The PMC controls all PLM equipment and instruments via an ESA standard OBDH (On Board Data Handling) bus.
• CBS (Standard Bus Couplers)
• RTU (Remote Terminal Units)
• DBU (Digital Bus Units)
• RBI (Standard Remote Bus Interface ASICs)
• ICU Intelligent Control Units)
The data handling architecture is decentralized because the Payload Module (PLM) and Service Module (SVM) have their own computer. OBDH data buses are being used for data exchanges between SVM and PLM computers.
Broadcast service provision: 9) The MetOp program, as successor to the NOAA POES morning series, is required to provide a continuous broadcast of its meteorological data to the worldwide user community, so that any ground station in any part of the world can receive local data when the satellite passes over that receiving station. This implies continued long-term provision of LRPT and VHF downlink services.
Orbit: Near-circular sun-synchronous polar morning orbit (local solar time at 9:30 hours on descending node), mean altitude = 817 km, inclination = 98.704º, repeat cycle = 29 days (412 orbits).
S/C attitude | - Three-axis stabilized through reaction wheels |
Data handling | - Instruments science data acquired as CCSDS packets |
Communications | - Omnidirectional S-band coverage (uplink 2 kbit/s, downlink: 4.096 kbit/s |
On-board power | - 2210 W from solar panel, average power over one orbit (EOL) |
Design life | 5 years |
S/C mass | - 4087 kg (launch) |
S/C size | - 6.3 m (height) by 2.5 m x 2.5 m (transverse section) in launch configuration |
S/C operations | - S/C controlled by EUMETSAT (Kiruna ground station |
The MetOp operational meteorological mission objectives consist of:
• Global sounding: To provide information about 3-D temperature and humidity fields in support of operational numerical forecasting systems
• Global imagery: To provide cloud imagery for forecasting applications, sea surface temperatures (SST), radiation budget temperatures. To support the global sounding mission through the identification of cloud-free areas
• Data collection and location: To support WWW objectives by the reception and dissemination of in-situ observations from ocean buoys and similar data collection platforms
• Preoperational data: To provide access to data from instruments which have not yet been declared fully operational
• Global data access: To primarily support global-scale weather forecasting by providing global data to the meteorological services within 2 1/4 hours of observation
• Local data access (AHRPT and LRPT): To support regional weather forecasting by providing broadcasted data to local receiving stations when the satellite is in visibility.
The MetOp climate monitoring mission contributions (for GCOS) consists of:
• Imagery and sounding
• Ocean measurements (including surfaces stress and winds)
• Clouds and Earth radiation budget: Radiation is the primary energy source of the climate system and principle heat input source to the oceans
• Sea ice information: The extent of sea ice is an important variable in connection with both ocean heat budget and radiation balance
• Atmospheric minor constituents: Concern over the depletion of stratospheric ozone suggests the importance of maintaining a continuous data set of global total column ozone and vertical profiles
• Precipitation estimates.
The MetOp Earth sciences research mission objectives include data provision to the European science community to advance investigations in fields such as:
• Atmospheric physics: chemistry, radiation and energy balance, clouds
• Oceanography: general ocean circulation and fluxes of heat, momentum and gases; modeling
• Hydrology: water cycle, continental snow and mountain glaciers, land cover, soil moisture, vegetation
• Cryosphere: sea ice, continental ice, modeling
The MetOp surveillance mission contributions to the regular monitoring of application-oriented parameters:
• Environment: pollution control, natural disasters, renewable resources
• Marine: offshore activities, ship routing, fishing, sea ice routing
Development Status
• June 7, 2019: MetOp Second Generation arrives at ESA/ESTEC in Noordwijk, The Netherlands.

• November 5, 2018: Following months of simulation training, teams at ESA's European Space Operations Center have completed the ‘dress rehearsal' before MetOp-C's liftoff on 7 November from Europe's Spaceport in Kourou, French Guiana. 11)
• October 4, 2018: Following the arrival of the MetOp-C satellite at Europe's spaceport in Kourou, French Guiana, the team has been testing and preparing the satellite for launch. With the alignment of the two main bodies of the satellite done and solar array attached, MetOp-C is complete and the team focuses on checking all the electrical connections. 12)
• July 9, 2018: The MetOp-C launch campaign has started with the first of three Antonovs landing at Cayenne Airport, French Guiana on 20 June. 13) The cargo aircraft transported 11 containers of equipment for ground support and IT-infrastructure, followed by the second, carrying the two main modules of the spacecraft a few days later. The third and final Antonov brought the solar array. This is prepareing the launch of the third polar-orbiting satellite in the Meteorological Operational satellite program.

• April 17, 2018: The MetOp-C meteorological satellite is getting ready for upcoming launch in order to join its siblings and further improve the quality of observations and data provided for weather forecast. 14) 15) While the initial plan was for each satellite to replace its predecessor, the excellent performance of the first two MetOp satellites allows them to be operated simultaneously, providing the meteorological community with increased data. The forthcoming launch of MetOp-C will further improve the quality of observations and data provided for weather forecasts.
• August 10, 2017: MetOp-C is the third and final satellite of the first generation of MetOp polar-orbiting meteorological satellites. The payload module of MetOp-C, developed and built by Airbus in Germany, was delivered to Toulouse after it completed a series of tests at ESA/ESTEC in Noordwijk, the Netherlands. The satellite, weighing in at four tons, is now almost complete after successful coupling of its payload and service module. In preparation for the launch scheduled for October 2018 from Kourou, French Guiana, MetOp-C will undergo a further series of radio-electric tests in the coming weeks. The solar panel, which is the last outstanding major component, will be integrated in November 2017 before vibration testing. 16)
• February 22, 2017: The payload module of MetOp-C, Europe's latest weather satellite, being lowered into Europe's largest vacuum chamber, the 10 m diameter LSS (Large Space Simulator). The LSS is part of ESA's Test Center in the Netherlands, the largest facility of its kind in Europe, providing a complete suite of equipment for all aspects of satellite testing under a single roof. 17) MetOp-C's instruments must be tested in space-like vacuum conditions. High-performance pumps will remove all air within the chamber to create an orbital-quality vacuum. Meanwhile, liquid nitrogen will circulate through the black walls to mimic the cold of sunless space.

• January 11, 2017: MetOp-C's sensor module was transported in the first week of January from Airbus Defence and Space in Friedrichshafen, Germany to ESA's Test Center in Noordwijk in the Netherlands, which is equipped to simulate every aspect of the space environment. The 2.1 ton module carries a suite of meteorology and climatology instruments, variously procured by ESA or sourced from EUMETSAT, France's CNES space agency and the US NOAA (National Oceanic and Atmospheric Administration). 18)


Launch
MetOp-A was launched on a Soyuz-2-1A (Soyuz-2/Fregat) launch vehicle on October 19, 2006 from the Baikonur Cosmodrome, Kazakhstan. Launch provider: Starsem, a French-Russian company. 20)
Orbit: Near-circular sun-synchronous polar morning orbit (local solar time at 9:30 hours on descending node), mean altitude = 817 km, inclination = 98.704º, repeat cycle = 29 days (412 orbits).
MetOp-B was launched on a Soyuz-2-1A (Soyuz-2/Fregat) launch vehicle on Sept. 17, 2012 from the Baikonur Cosmodrome, Kazakhstan. Launch provider: Starsem. 21)
MetOp-C with a mass of 4033 kg was launched on 7 November 2018 (00:47 GMT) on a Soyuz ST-A / Fregat-M launch vehicle from Kourou, French Guiana. MetOp-C is the last in the current series of MetOp satellites. 22) 23)
Some 60 minutes later Soyuz's upper stage delivered MetOp-C into orbit and contact was established through the Yatharagga ground station in Australia. MetOp-C is now in the hands of ESA's flight operations team in Darmstadt, Germany, for the three-day LEOP (Early-orbit Operations Phase), until the handover of flight operations to EUMETSAT.
The MetOp satellites are developed by ESA under a cooperation agreement to form the space segment of the EUMETSAT Polar System. This system is Europe's contribution to a multi-orbit polar system shared with the US NOAA agency.
Stéfane Carlier, ESA's MetOp Project Manager, noted, "The MetOp satellites carry an array of sensors that measure temperature, humidity, trace gases, ozone and wind speed over the ocean."
Alain Ratier, EUMETSAT Director General, said, "EUMETSAT is grateful to Arianespace for another successful launch, after those of MetOp-A and MetOp-B. We are now ready to take over flight operations from ESA's European Spacecraft Operations Center to perform in-orbit commissioning of the satellite and instruments until end of January, in partnership with ESA, CNES and NOAA. After this, EUMETSAT scientists will validate output products with expert users, such that we can release realtime products to users in spring 2019."

Mission Status
• December 1, 2021: MetOp-A was completely de-orbited after 15 years of operation, as the thermal constraints imposed by its drift imposed challenges on the spacecraft's safety. The IASI instrument had ended all mission services on 15 October 2021 due to the execution of associated technology tests. 121)
• December 13, 2018: MetOp-C's instruments have been progressively switched on and tested. 24) The IASI (Infrared Atmospheric Sounding Interferometer) instrument was developed by the French Space Agency (CNES) and built by Thales Alenia Space. It provides information on the vertical structure of the atmospheric temperature and humidity at an unprecedented accuracy and vertical resolution of 1km. The IASI also monitors concentrations of trace and greenhouse gases, such as ozone, carbon monoxide and sulphur dioxide, in the atmosphere. As MetOp-C's "sibling" spacecraft MetOp-A and –B are still fully operational, despite outlasting their design lifetime of five years, data from three IASI instruments will soon be available for use in weather forecasting and contribution to environmental and climate monitoring.
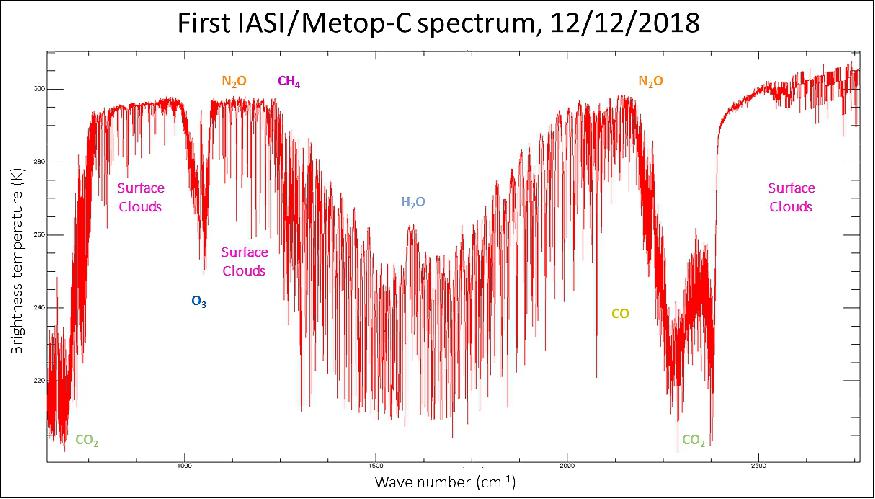
- IASI Project Manager at CNES, Olivier Vandermarcq said, "A decisive step was achieved today with the production of the first spectrum of the Earth's atmosphere by IASI on board MetOp-C. As a Fourier interferometer, IASI is a complex mix of mechanical, optical and electronics components. It includes, for instance, a moving optical corner cube which will perform 76 million forward/backward cycles a year. Every component needs to do its job perfectly so that at the end, IASI works well and produces data from space with outstanding performances. This can never be taken for granted despite the exhaustive tests and activities performed on-ground before launch. This is why CNES is extremely satisfied and very proud of the success of this important step that is associated with the excellence of the partnership with EUMETSAT."
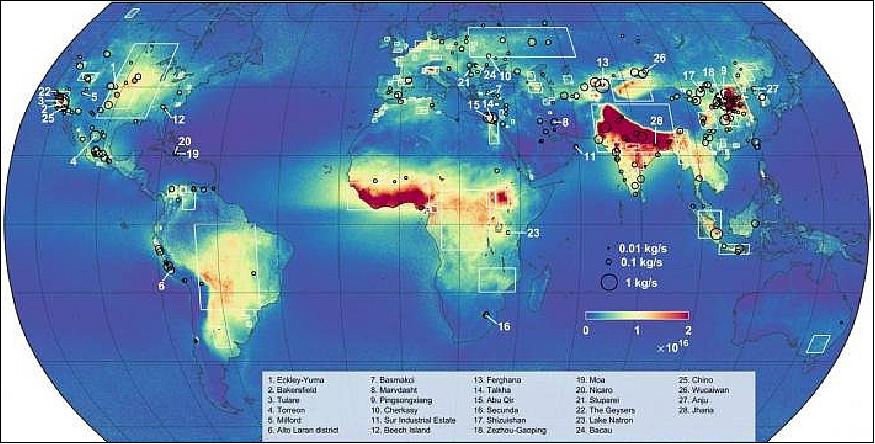
• December 5, 2018: Researchers from CNRS and Université Libre de Bruxelles have created the first global map of atmospheric ammonia distribution using satellite data from 2008 to 2016. They identified over 200 ammonia sources, with two-thirds being newly discovered. The map has about one-square-kilometer resolution. Combining the map with imagery, they found 241 anthropogenic NH3 emission points (83 from livestock, 158 from industry), and 178 larger emission zones. Existing emission estimates are much lower than the study's findings. The team also tracked human activity changes over time, highlighting the need for better ammonia pollution management.25) 26)
• On 16 November 2018, EUMETSAT's control center successfully activated the Argos-3 instrument on the Metop-C satellite. The first signal received came from a beacon installed on a Senegalese fishing boat off Dakar: a first step for a sustainable management of marine resources. 27) This instrument brings to seven the number of Argos instruments currently in orbit, thus strengthening the Argos constellation which connects about 18,000 active beacons each month. From 2019, Kinéis, a new subsidiary of CNES, will operate the Argos system and, with the launch of its constellation of 20 nanosatellites in 2021, will be able to give access to a space IoT to a large audience. 28)
• November 12, 2018: Mission teams at ESA's ESOC operations center in Germany handed control of the recently launched MetOp-C satellite to EUMETSAT on Saturday morning, three days after launch. 29) MetOp-C was launched into orbit on 7 November on top of a Soyuz rocket. Since then, teams at ESA's mission control center in Darmstadt, Germany, have been adjusting the satellite's position in space.
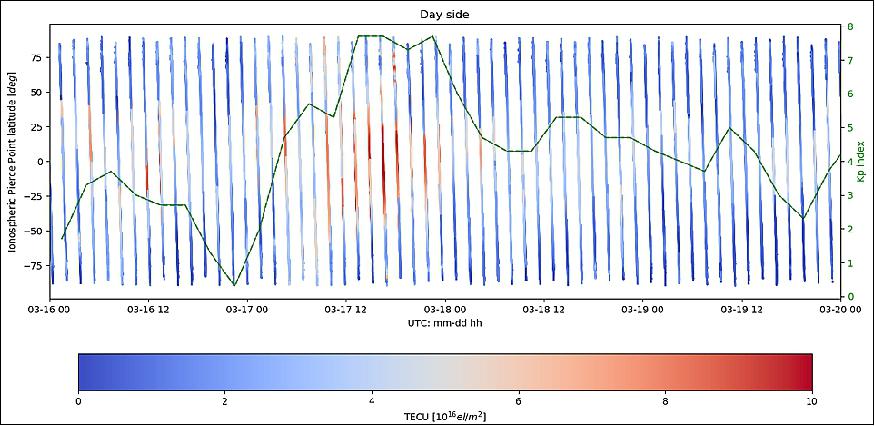
• September 6, 2018: Zenith GNSS (Global Navigation Satellite System) data collected through the Precise Orbit Determination (POD) antennas of the GRAS receivers flying on the MetOp-A and MetOp-B satellites can also be exploited to determine the Total Electron Content (TEC) of the topside ionosphere from the Low Earth Orbit (LEO) GRAS receiver to any GNSS satellite in view. These 'slant' TEC data are used to determine the vertical TEC of the topside ionosphere (namely the tTEC). 30)
• December 8, 2016: The EUMETSAT Council agreed that the ageing, but still healthy, MetOp-A satellite will be exploited on a "drifting" orbit from June 2017 onwards, in order to extend its useful lifetime from 2019 to 2022. 31) The nominal ground track will be maintained, but the local time at ascending node will decrease from the nominal mission value of 21:30 hr in June 2017 to 19:30 hr in 2021. This measure will enable two to three years of tri-MetOp operations with MetOp-B and MetOp-C as from 2019, after the end of MetOp-C commissioning. The launch of MetOp-C is currently planned for October 2018. Operating MetOp-A in a drifting orbit will maximize the return on investments of EUMETSAT Member States and benefit the worldwide NWP (Numerical Weather Prediction) user community. At the end of its operational life, MetOp-A will then be de-orbited to a lower perigee orbit for reentry within 25 years, in line with the policy adopted by Council to comply as far as possible with space debris mitigation guidelines, although MetOp satellites were designed long before these guidelines were established.
- Progress in the development of the EPS-EP system was reported, including the contract approval for the PDAP function of the ground segment. PDAP involves ground stations for data acquisition from MetOp-SG satellites and a processing system for real-time extraction of physical and environmental products. Cooperation agreements were signed between EUMETSAT's Director-General and CEOs of various National Meteorological Services, leading Satellite Application Facilities (SAFs), aiming for the Third Continuous Development and Operations Phase (CDOP 3) of eight SAFs. CDOP-3, spanning 2017-2022, aims to expand EUMETSAT's operational product portfolio using Meteosat Third Generation and EPS-SG observations.
• October 19, 2016: MetOp-A is still operational after 10 years, twice its specified lifetime. Collecting high precision weather data, it helps businesses, farmers and security organizations as global economic activity has become increasingly dependent on – and affected by – weather. 32) According to Dieter Klaes, program scientist at EUMETSAT, "by itself MetOp-A contributes roughly 25% of all data gathered for meteorological purposes, and 38% of all satellite platforms". The amount of data has been further increased since the launch of MetOp-B in September 2012. MetOp-B flies on the same orbit as its predecessor, half an orbit apart from the latter, leading to accurate forecasts up to 12 days ahead.
- In the MSG (MetOp Second Generation), currently being developed by Airbus Defence and Space, there will be a fleet of six satellites, with pairs of satellites carrying different packages to deliver complementary meteorological information. The A series of satellites (as of 2021) will be equipped with atmospheric sounders as well as optical and infrared imagers, while the B series (as of 2022) will focus on microwave sensors.
• June 10, 2016: At 02:30 GMT, the MetOp-A meteorological satellite crossed the equator to begin its 50,000th orbit since its launch from Baikonur, Kazakhstan, on October 19, 2006. So far, MetOp-A has downlinked more than 100 TB of raw meteorological data. 33)
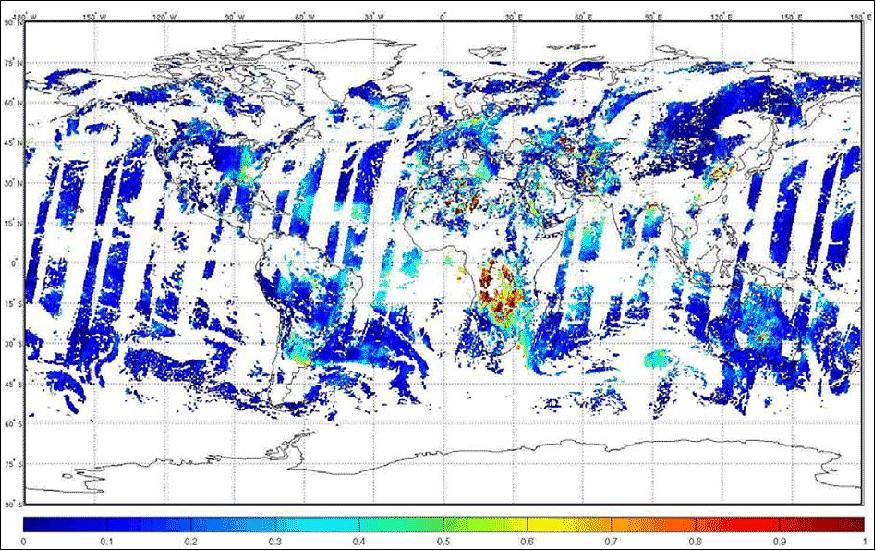
• March 17, 2016: EUMETSAT released a major update of the PMAp (Polar Multi-Sensor Aerosol properties) product. The new release extends the coverage of the previous AOD (Aerosol Optical Depth) product, which was restricted to water surfaces. Now, this AOD product has global coverage, even for solar zenith angles lower than 70º, and includes AOD over almost all land surface types, including desert areas, but excluding surfaces with snow/ice cover. This updated product also contains a realistic AOD error estimate. 35)
• October 2015:
Two of the three MetOp satellite series are operational, with MetOp-A nearing the end of its operational life. These satellites are intended to provide climate monitoring data for at least 14 years. Discrepancies in along-track acceleration from slew and anti-slew maneuvers of MetOp-B led to the development of a precise attitude model for use in Precise Orbit Determination (POD). This improves calibration of maneuver segments and aids in understanding acceleration differences between identical-design MetOp spacecraft.
The new attitude model has notably enhanced maneuver calibration, indicating that MetOp-B's along-track acceleration contribution is nearly twice that of calibrated MetOp-A maneuvers. To compare accurately, all past Out-Of-Plane (OOP) maneuvers for MetOp-A and MetOp-B will be recalibrated using this attitude model. If the discrepancy persists in MetOp-B's OOP maneuvers, it could point to a thruster misalignment, altering parasitic acceleration direction. Though observed in all orbit components, the along-track component is vital for flight operations planning. A thruster misalignment would need consideration in future MetOp-B maneuver planning, and the findings could aid maneuver planning for MetOp-C and EPS-SG satellites.
Future refinements are proposed:
1) Fine tuning of the start and stop times of the maneuver segments
2) Modeling of the parasitic thrust effect caused by the attitude control thrusters in between the maneuver segments. This involves defining more smaller thrust segments
3) Divide the slew and anti-slew maneuvers into sub-segments to better represent the actual force exerted
4) Model the thrust, especially in the slew and anti-slew, as linearly increasing/decreasing variable acceleration over time.
• May 20, 2015: Four MHS instruments are currently on orbit (on MetOp-A and -B and NOAA-18 and -19) and operating nominally except for one channel on NOAA-19. A fifth instrument will be launched on board MetOp-C in 2018.
The MHS instrument is a radiometer providing operational data from polar orbit in five microwave channels, used to retrieve vertical profiles of atmospheric water vapor. These are key inputs for numerical weather prediction models, which are used operationally for weather forecasting worldwide. The MHS instrument was developed by Matra Marconi Space UK (now Airbus Defence & Space). 37)
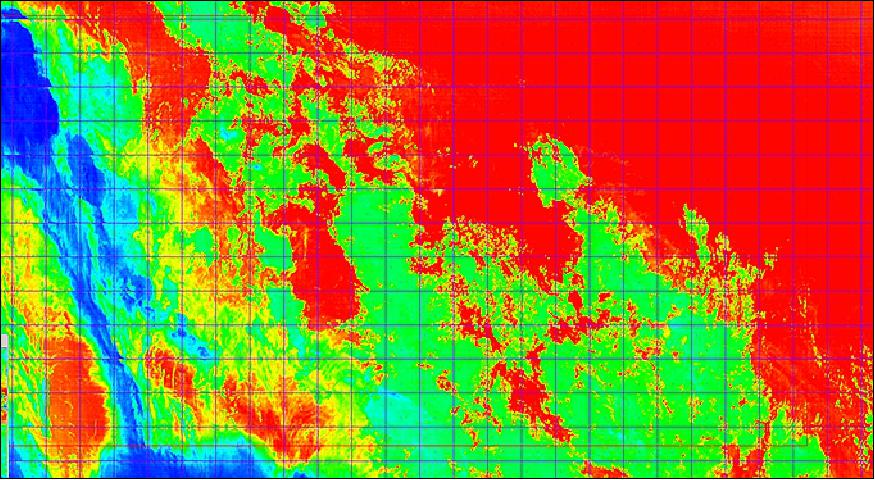
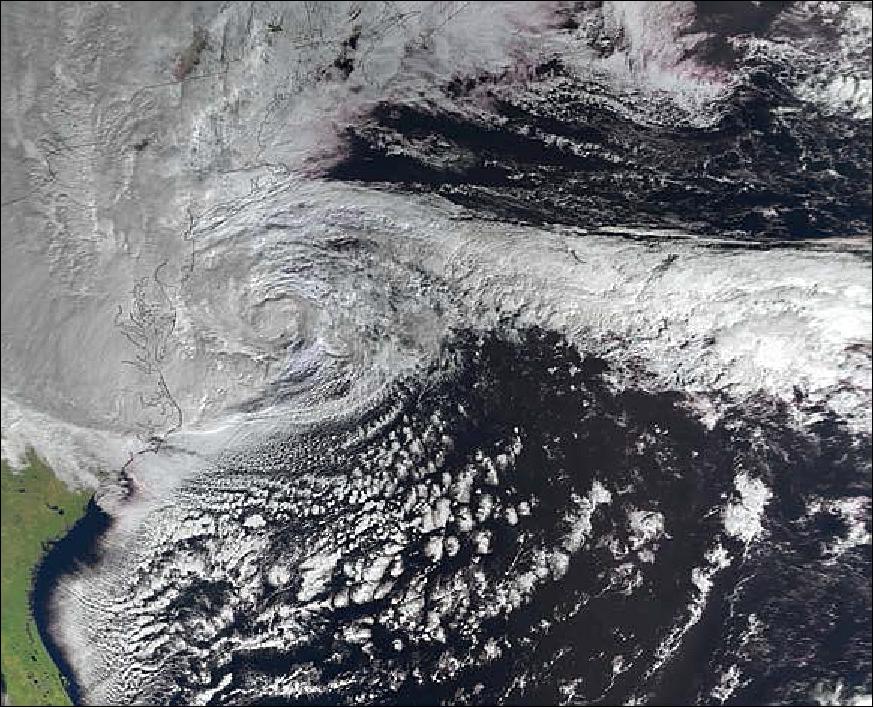
• July 7, 2014: MetOp-B acquired an image of the super Typhoon Neoguri, so far the strongest typhoon in the 2014 Western Pacific season. The system became a typhoon, the Western Pacific equivalent of a Atlantic hurricane, on 4 July and intensified to Super Typhoon strength, maximum sustained winds of 240 km/h, on 6 July. 38)

Legend to Figure 25: The enhanced infrared MetOp-B image shows the structure of the storm with a very well defined eye. The colors indicate temperature, with red showing areas where the cloud tops are colder than -70ºC. The cyan color denotes ice clouds.
• On April 24, 2013, MetOp-B replaced MetOp-A as EUMETSAT's prime operational polar-orbiting satellite following the end of its commissioning period. MetOp-A will continue operations as long as its available capacities bring benefits to users. 39) MetOp-B began delivering first data within two weeks of its launch, allowing expert users to participate in the product calibration and validation activities. The satellite was declared operational on 29 January, 2013, bringing operational quality products from most instruments to the user community within three months of launch.
• February 2014: The MetOp satellites working in tandem has lead to the observation of global winds, or Atmospheric Motion Vectors (AMVs), via the AVHRR (Advanced Very High Resolution Radiometer) instrument 40). AMVs are produced from satellite images by tracking the movement of atmospheric features, mainly cloud patterns, through successive images to estimate wind speed and direction. AMVs are useful as input for numerical weather prediction, especially over ocean areas where other wind observations are sparse. The AMVs collected by polar-orbiting satellites, such as MetOp, are particularly important as they provide coverage of winds in the polar regions, which are not well observed by geostationary satellites.
- Having two MetOp satellites in orbit also creates an opportunity to collect more detailed data from the onboard GOME-2 (Global Ozone Monitoring Experiment) instrument. Since 15 July 2013, GOME-2 on MetOp-A has been operating in a "reduced swath" mode of 960 km resulting in a ground pixel size of 40 x 40 km, half that of the GOME-2 instrument on MetOp-B which still operates in "normal" mode. According to Rose Munro, EUMETSAT's Atmospheric Composition Manager, this operational configuration "ensures full daily coverage, without the gaps in equatorial regions which occur with only one instrument in operation"
• February 8, 2013: Satellites show that the recent ozone hole over Antarctica was the smallest seen in the past decade. Long-term observations also reveal that Earth's ozone has been strengthening following international agreements to protect this vital layer of the atmosphere. According to the ozone sensor on Europe's MetOp weather satellite, the hole over Antarctica in 2012 was the smallest in the last 10 years. 41)
• November 2012: The commissioning phase of MetOp-B, also called SIOV (Satellite In-Orbit Verification) phase was conducted at the EUMETSAT control center, with the support of an Astrium team. It has been formally concluded by a successful SIOV review held in November 2012 (Ref. 19). The detailed verification of the satellite platform and PLM avionics has allowed confirming the very good performance of the various subsystems and units for which nominal, and in many cases better than originally budgeted performance has been measured. The satellite resources situation at the end of the SIOV has been found fully satisfactory, with an ample power budget margin, and a large reserve of propellant due to a nominal launch and few orbit correction maneuvers. Overall, the performance situation fully compares to the one of MetOp-A at beginning of life. The satisfactory data quality obtained from the beginning allowed EUMETSAT to begin trial dissemination of data to partners before end of October 2012. This covered data for AMSU, GRAS, MHS, ASCAT, AVHRR and HIRS.
• October 24, 2012: the IASI instrument on MetOp-B produced first calibrated data. 42)

• September 28, 2012: Four of the instruments on the MetOp-B weather satellite (AMSU-A, ASCAT, MHS, GRAS) have been activated this week and are delivering data. After a commissioning phase of 6 months, MetOp-B is expected to replace the services of MetOp-A as prime operational spacecraft. 43)
• September 20, 2012: EUMETSAT took control of MetOp-B operations, following the three-day LEOP (Launch and Early Orbit Phase) conducted by the European Space Operations Center (ESOC) of the European Space Agency (ESA). 44)
• June 2011: EUMETSAT declared ADA (Antarctic Data Acquisition) operational for MetOp-A. The EPS Ground System received next to Svalbard (Spitsbergen) a second ground station at McMurdo, Antarctica due to long-term international partnership agreements of EUMETSAT, NOAA, NSF and NASA. Hence, MetOp -A became the first polar-orbiting environmental satellite to achieve the 65-minute data latency operationally (see ADA project description at end of this file). 47)
• January 2011: MetOp-A is operating nominally in January 2011. The spacecraft completed its 4th year on orbit in October 2010. All instruments are performing excellently, with a few exceptions: EUMETSAT discontinued the LRPT (Low Rate Picture Transmission) service in 2007 and AMSU-A1's channel 7 was declared as failed in 2009. The A-HRPT data transmission continues in restricted coverage area due to radiation potential issues. 49) An investigation group has been set up to evaluate the in-orbit throughput degradation of GOME-2 which could lead to some limitations in science data. MetOp-A deorbiting studies have started, planning for the first maneuvers around the MetOp-C launch date.
- Since its launch in 2006, the MetOp-A polar-orbiting satellite has helped transmit data from thousands of animals, oceanographic buoys, weather stations, and other platforms around the world with its on-board Argos-3 instrument. As of January 2011, there are over 20,000 active Argos transmitters on platforms ranging from high-tech oceanographic buoys and weather stations to the heads of elephant seals. Polar-orbiting satellites such as MetOp-A play their part in the Argos system by relaying the data they receive from Argos transmitters back down to earth for processing. 50) 51)

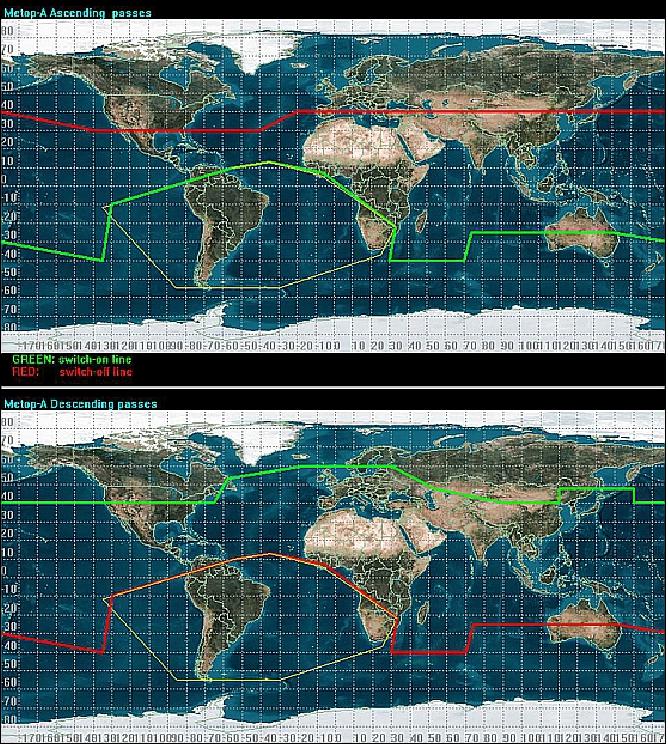
- January 18, 2011: EUMETSAT commenced its extended AHRPT (Advanced High Resolution Picture Transmission) communication service. This enhancement effectively extends the geographical coverage of the AHRPT service to parts of Africa, Asia and the Pacific region where previously users were unable to receive the service. For the first time since the start of zone-based operations, transmissions will take place over ascending portions of the orbit, thereby further benefiting currently served geographic zones. Figure 30 indicates the new coverage zones for both descending and ascending passes. For spacecraft safety reasons, the service still maintains the same operational restrictions when passing over the polar regions and the SAA (South Atlantic Anomaly). 52)
- On Aug. 27, 2010, MetOp-A completed its 20,000th orbit delivering its data to the EUMETSAT Polar System ground station on Svalbard around lunchtime. 54)
• Augut 27, 2010: After more than three years in orbit, the IASI instrument shows very good functional health and very good performances. No symptom of degradation has been observed since launch. From a functional point of view, there is no use of redundancy and no hardware anomaly. - All functional anomalies have a SEU/SET origin. These SEU/SET (Single Event Upset/ Single Event Transient) anomalies had a small but non negligible impact on the instrument availability in the beginning of life. During the first years of operations, a significant number of SEU/SET events occurred mainly over the SAA (South Atlantic Anomaly) region and the polar regions. The consequences were mission outages lasting from a few hours to a few days. 55)
• December 18, 2008: The ASCAT level-2 Soil Moisture products have become operational. The trial dissemination of Soil Moisture products started on May 26, 2008. 56)
• The operational phase of MetOp-A started on May 15, 2007 when the spacecraft was officially declared operational after six months of commissioning. Some calibration and validation activities are still ongoing, and not all Level 1 products are operational yet. 57)
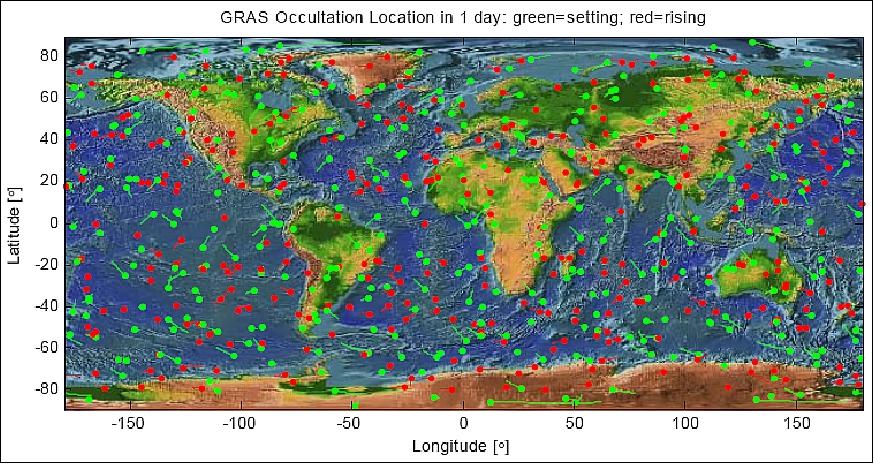
• November 7, 2006: The geographical coverage of the measured occultations of the GRAS instrument is shown in Figure 31 for Nov. 1, 2006. On that day 660 occultations were recorded, 338 setting ones and 322 rising ones. The coverage is globally homogenous, which demonstrate that GRAS will provide precious profiles over sparsely covered regions such as oceans and polar regions. The required number of occultation per day is 500, which is met with substantial margins. All performances for GRAS as a simple GNSS receiver and as an atmospheric sounder are well within specifications (Ref. 102).
- The LRPT (Low Rate Picture Transmission) system faced an on-orbit failure within 11 days of activation, while the HRPT-A system failed after 6 months of operation due to harsh particle radiation effects. EUMETSAT engineers identified that a common component in both failed instruments and the still operational HRPT-B was vulnerable to high linear energy transfer (LET) particles. These energetic particles caused damage by creating charge separation as they passed through semiconducting material. Activating HRPT-B was delayed until a safe operational plan was devised considering its vulnerabilities, requiring a better understanding of space particle radiation, particularly heavy ions. Collaboration between EUMETSAT, NOAA, and NRL engineers and space physicists salvaged some HRPT capability by identifying low particle radiation areas in the spacecraft's orbit where HRPT-B could be safely used. NOAA physicists provided anomaly rate tables based on geographic latitude and longitude, enabling a new operational mode. This allowed local weather forecasting data provision while safeguarding the instrument and extending its lifetime. Consequently, HRPT-B has been operational since September 2008, lasting three times longer than the failed counterpart.58) 59)
• October 27, 2006: The ASCAT instrument was switched on for measurement.
• October 16, 2006: The GRAS instrument was switched on. Within 23 seconds the instrument tracked a first GPS satellite, and 64 seconds after the first navigation solution was achieved.
• The Satellite In-Orbit Verification (SIOV) phase commenced after MetOp-A was handed over from the LEOP service by ESA/ESOC to EUMETSAT. This phase included intense activities, revealing anomalies as well as successes. The SIOV phase officially concluded with the SIOV Review on March 29, 2007. Following separation from the Fregat upper stage of the launcher, the satellite initiated an automated sequence to initialize its in-orbit operations. Key operations like solar array deployment, attitude acquisition and control, and antenna deployment were successful. The initial orbit correction maneuvers were precise, concluding the Launch and Early Orbit Phase (LEOP) and allowing the start of the commissioning phase. 60)
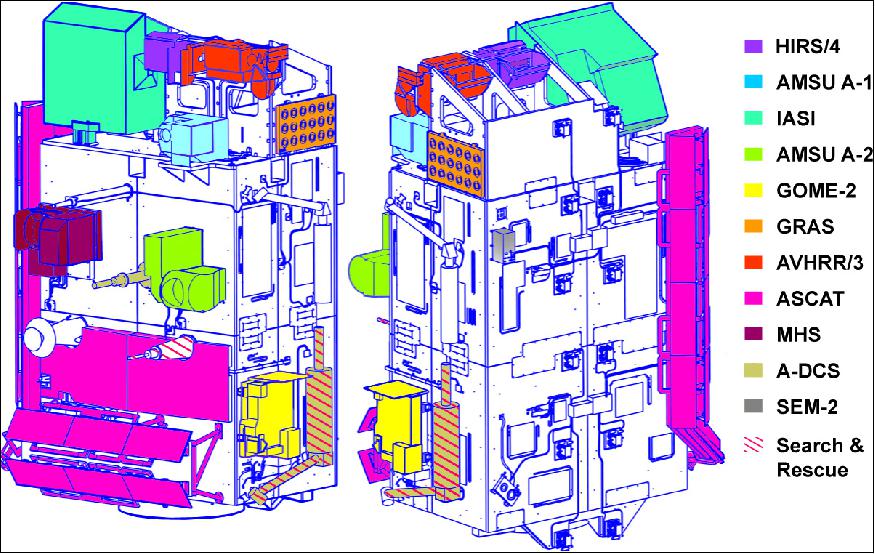
MetOp-A Sensor Complement
MetOp-A carries 13 instruments provided cooperatively by Eumetsat, ESA, NOAA and CNES. They vary from the largely recurrent units (AVHRR, HIRS, AMSU-A1/A2) developed within the US Polar Orbiting Environmental Satellite (POES) Program to wholly new instruments developed specifically for MetOp (IASI, ASCAT, GRAS). 61)
For a description of AVHRR/3, HIRS/4 and AMSU-A, see the NOAA-POES documentation.
Payload Sensor | Mission Objectives | Sensor Provider |
AVHRR/3 (Advanced Very High Resolution Radiometer) | Global imagery, global sounding, ocean measurements (SST), clouds and Earth radiation budget, land measurements | NOAA |
HIRS/4 (High Resolution Infrared Sounder) | Global sounding, atmospheric minor constituents, (ozone) | NOAA |
AMSU-A (Advanced Microwave Sounding Unit-A - A1 & A2) | Global sounding, sea ice | NOAA |
MHS (Microwave Humidity Sounder) | Global sounding, clouds and Earth radiation budget, sea ice | EUMETSAT |
IASI (Infrared Atmospheric Sounder Interferometer) | Global sounding, ocean measurements (SST), clouds and Earth radiation budget, some atmospheric trace constituents, land measurements | CNES/ |
ASCAT (Advanced Scatterometer) | Ocean measurements, surface stress and surface wind | ESA |
GOME-2 (Global Ozone Monitoring Experiment-2) | Atmospheric trace gases (ozone content and profile) | ESA/ |
GRAS (GNSS Receiver for Atmospheric Sounding) | Atmospheric refractive index measurement in limb-sounding mode | ESA/ |
Argos-3 (Remote Data Collection System), | Data collection and location; ADCS on-board, PTTs and DCPs in the ground segment | CNES |
S&R ( Search and Rescue System) | Cooperative satellite-based radiolocation system for search and rescue operations. Relay of emergency radio signals to ground stations from aviators, mariners and land travellers in distress. | CNES/NOAA |
SEM-2 (Space Environment Monitor-2) | Monitoring of the S/C environment (solar-terrestrial) | NOAA |
ASCAT (Advanced Wind Scatterometer)
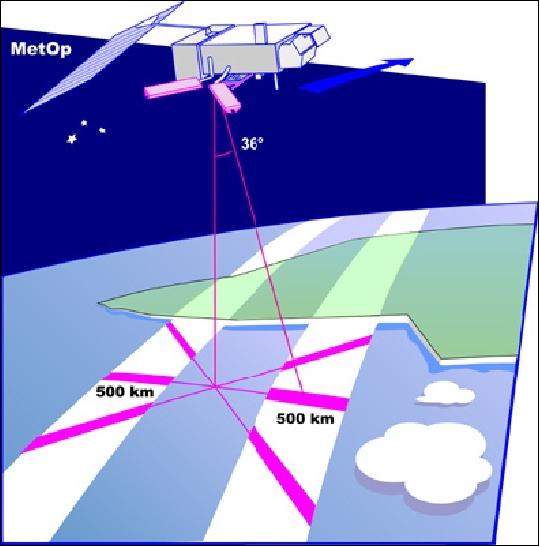
ASCAT is an active ESA instrument, developed by EADS Astrium GmbH of Friedrichshafen (Germany) under contract to Astrium SAS, France (the ASCAT design is of AMI-SCAT heritage flown on ERS-1 and-2). Objective: Determining wind vector fields at sea surface by measuring the backscattering coefficient [normalized radar cross section sigma-naught (σo), also referred to as NRCS] on a global basis. The requirement calls for the measurement of wind speeds in the range of 4-24 m/s with an accuracy of 2 m/s and a direction accuracy of ±20º. In addition to measuring wind vectors, ASCAT will also help monitor snow and ice distribution over land and sea. 62) 63) 64) 65) 66) 67)
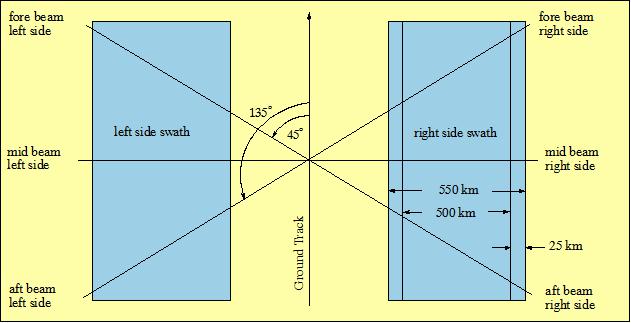
ASCAT is a real-aperture C-band (5.255 GHz) dual-swath and three-look radar instrument with high radiometric resolution and stability. The design of the system exploits the LFM (Linear Frequency Modulation) measurement principle on the basis of long transmit pulses (about 10 ms) with linear frequency modulation (chirps). This permits the application of low-peak transmission power (about 120 W) and frequency domain processing. ASCAT sequentially illuminates two strips (swaths) of the sea surface (two 550 km wide swaths, one on either side of the satellite ground track). This feature results in fast global coverage capability (twice as fast as ERS-1 and -2). The major differences between ASCAT and AMI-SCAT are:
- Enhanced coverage due to double swath operation
- Spatial resolution: increased spatial resolution is provided on an experimental basis
- Use of solid-state technology
- Improved radiometric performance (accuracy and inter-beam stability)
- Reduced downlink data rate due to on-board data processing (from 1.4 Mbit/s on AMI-SCAT to 55 kbit/s on ASCAT)
- In addition to the processing of echo signals, the instrument also performs an internal calibration process within each pulse repetition interval
- Reduced power needed for the transmission of continuous-wave pulses (about 120 W of peak power are needed for ASCAT compared to 4.8 kW for AMI-SCAT on ERS-1).
Parameter | Nominal mode | High-resolution mode |
Center frequency | 5.255 GHz | |
Swath width (full performance) Swath width (reduced performance) | 500 km 550 km | |
Swath length | continuous | |
Incidence angle mid near at H min | 25º | |
Localization accuracy | 4.4 km | |
Polarization | vertical | |
Cross polarization | >20 dB | |
Spatial resolution | 50 km | 25 - 37 km |
Spectral resolution | 0.0195/km |
|
Sampling interval | 25 km | 12.5 km |
Radiometric resolution at low wind (minimum backscattering) | 2.5 - 7.1% | 6.0 - 17.6% |
Radiometric resolution at high wind (maximum backscattering) | 2.0 - 2.7% | 5.0 - 9.1% |
Radiometric accuracy | 0.47 - 0.55 dB pp | 0.48 - 0.56 dB pp |
Interbeam radiometric stability | 0.33 - 0.41 dB pp | 0.33 - 0.41 dB pp |
Ambiguity under worst case scenario | 0.34 - 3.3% | 0.34 - 3.3% |
Dynamic range (backscatter coefficients on the ground at near and far swath) | -8.6 - 4.3 (near) dB -28.6 - -8.8 (far) dB | -8.6 - 4.3 (near) dB -28.6 - -8.8 (far) dB |
Aliasing error | 0.08% | 0.08% |
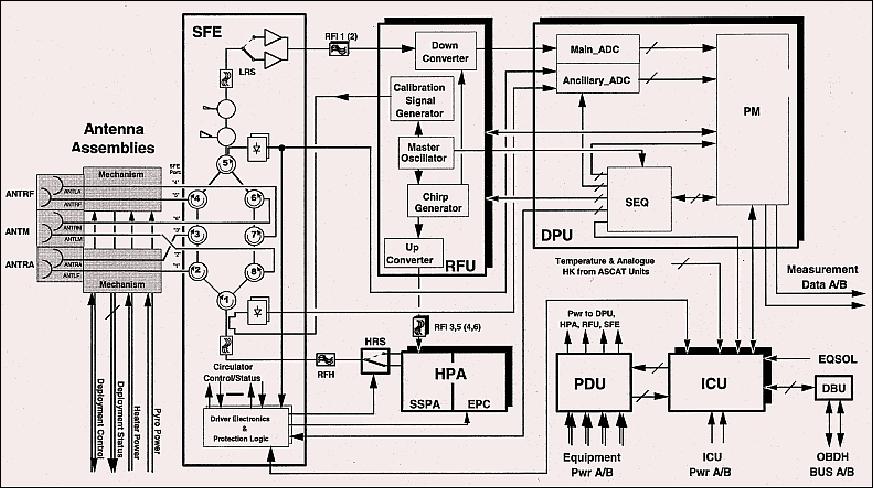
The ASCAT instrument consists of the following elements: Antennas (6), SFE (Scatterometer Front End), RFU (Radio Frequency Unit), HPA (High Power Amplifier), DPU (Digital Processing Unit, PDU (Power Distribution Unit), and ICU (Instrument Control Unit).
ASCAT employs three antennas for each of the two swaths to obtain wind speed and wind direction measurements with ambiguity present. All six antennas are slotted waveguide aluminum arrays. One antenna in each set is looking sideward at 90º (cross-track direction), one forward at 45º, and one aftward at 135º (see Figure 33). All antennas form a fan beam with narrow azimuth pattern and a relative wide elevation pattern, resulting in a swath of about 550 km. The local incidence angles are between 25-65º (mid near at H min = 25º). In each swath a regular grid of points (nodes) is defined where the σo triplet values are determined. The internode distance is 25 km for nominal resolution, and 12.5 km for high-resolution observations. The wind data at each node are extracted from a wind model. The spacing of the resulting wind vectors after processing will be 50 km or better. Information on sea ice cover, snow cover and other parameters can also be derived from the basic σo data, making this instrument of great importance for many disciplines. 68) 69)
The received echo signal is de-chirped with an image of the transmitted pulse, filtered and down-converted to baseband. The baseband signal is sampled and processed by the on-board digital signal processor. This processing consists of a power spectrum estimation (transformation to the frequency domain and square modulus detection) followed by (spatial) low-pass filtering. This results in echo power spectra, where each frequency corresponds to a specific slant range distance.
ASCAT is calibrated by using an instrument-internal calibration unit which monitors potential variations in transmitted power and receiver gain. External calibration is achieved by using ground transponders and the Amazonian rain forest. 70)
The ASCAT instrument has a mass of 260 kg, a power consumption of 215 W, and a data rate of 42 kbit/s.
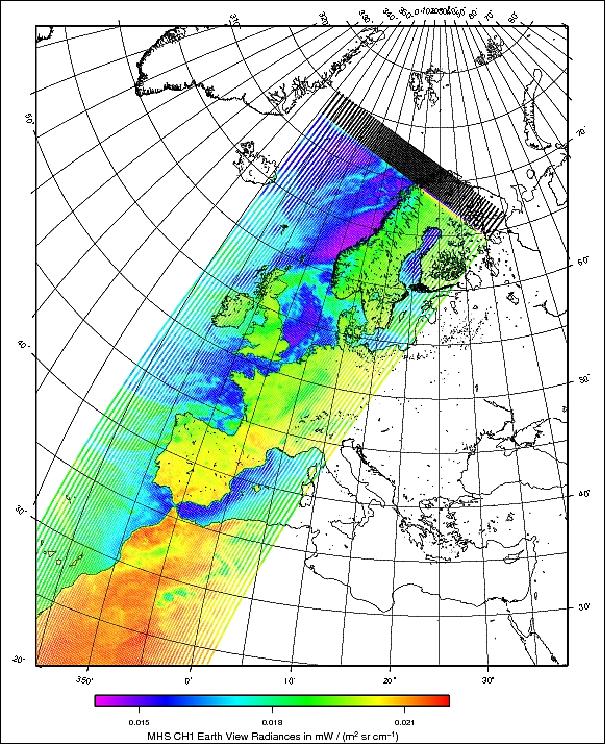
MHS (Microwave Humidity Sounder)
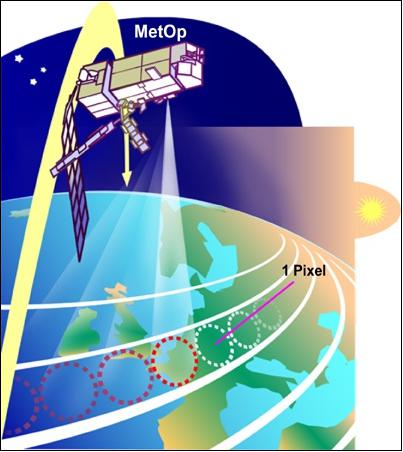
MHS is a EUMETSAT instrument, built by EADS Astrium Ltd., UK. MHS is a five-channel self-calibrating instrument, providing humidity profiling capability in the frequency range of 89 - 190 GHz. The channels 2-5 provide a humidity sounding capability (water vapor absorption line), while channel 1 measures the Earth's surface temperature and emissivity, in conjunction with the AMSU-A window channels, and detects cloud and precipitation contaminated pixels. The MHS instrument is a total power radiometer which measures the total noise power from the scene. MHS scans in the cross-track direction at a rate of 2.66 seconds (the scan is synchronized with AMSU-A). The Earth view and two calibration views are scanned at a constant velocity, rapid acceleration/deceleration is during the intervening periods. The circular IFOV (pixel) has a diameter at nadir of 16 km. The swath width (about 2000 km) corresponds to 90 contiguous pixels. 71) 72)
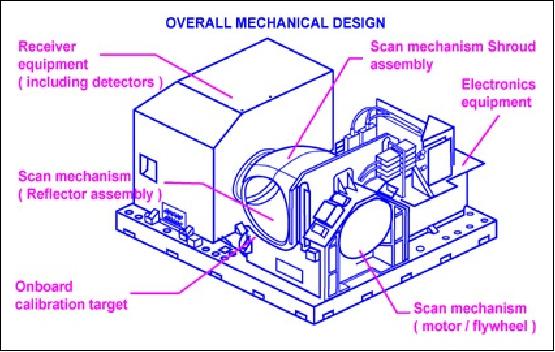
MHS is a compact quasi-optical heterodyne radiometer, consisting of the following elements: reflector, receiver (quasi-optical front end, amplifiers, filters, video detectors), scan mechanism, on-board calibration target, and an electronics unit. The instrument mass is 63 kg, power < 93 W. While the MetOp-specific instruments use the European OBDH (On-board Data Handling) standard interface, MHS is using the MIL-STD-1553 interface. Both of these standards are high-level command and control interfaces, permitting the use of instrument intelligence.
• Detectors: The MHS contains four detectors, one per channel. The fifth channel is achieved by splitting the 183.311 GHz signal into two channels, each with a different bandwidth.
• Scanning: An offset paraboloid reflector is mechanically rotated in order to provide a scan of the Earth, the onboard calibration (hot) target and the deep space (cold) target. The Earth is scanned in a direction perpendicular to the direction of the satellite's path (i.e. across track scanning). - The reflector rotates once per 2.667 seconds, with a slower rate of rotation when viewing the Earth and targets but at a faster rate in between. The scan motion of the reflector is fully compensated for momentum by a counter-rotating flywheel to minimize the disturbances to the satellites' AOCS. This flywheel is controlled independently to the reflector.
• To provide an interface between the MHS instrument and the payload module (PLM), a separate electronics unit, called the MPU (MHS Protocol Conversion Unit), is used, for handling commands, telemetry and the science data. This unit interfaces with various other equipment in the Payload Module. The MPU has been designed and developed by Alcatel Space, Switzerland.
• FOV (Field of View): The FOV of the instrument is circular, and the 'footprint' is approximately 16 km in diameter at the Earth's surface in the nadir direction. The MHS instrument takes 90 separate data samples (pixels) for each of the five channels during each scan across the Earth view (see section Overview). Each subsequent scan will provide Earth view data from a swath immediately adjacent to the previous scan. This 'scan mode' is the normal operational mode of the MHS. However, the MHS can also be operated in a Fixed View Mode. In this mode, the reflector remains in any defined static position, throughout all data sampling.
Parameter | Channel 1 | Channel 2 | Channel 3 | Channel 4 | Channel 5 |
Center frequency (GHz) | 89.0 | 157.0 | 183.311±1 | 183.311±3 | 190.311 |
Channel bandwidth (max, GHz) | 2.8 | 2.8 | 2 x 0.5 (dual side band) | 2 x 1.0 (dual side band) | 2.2 |
Center frequency stability (MHz) | -0, +7 | -40, +34 | -27, +18 | -27,+18 | -5, +36 |
Polarization | V | V | H | H | V |
Temperature sensitivity (k) | 0.22 | 0.52 | 0.24 | 0.21 | 0.57 |
Calibration accuracy (abs K) | 0.42 | 0.24 | 0.16 | 0.42 | 0.29 |
Beam efficiency (%) | 94.6 | 99.0 | 95.4 | 95.4 | 94.9 |
Beamwidth (º) | 1.12 | 1.17 | 1.02 | 1.02 | 1.05 |
Beam pointing (º) | 0.01 | 0.01 | 0.01 | 0.01 | -0.02 |
Cross polarization (%) | 1.2 | 0.6 | 3.5 | 3.5 | 1.9 |
Note: Under the MOU between EUMETSAT and NOAA concerning cooperation for polar satellite systems, the MHS instrument is also being flown on the NOAA POES series (EUMETSAT-funded instrument) with a first flight planned on NOAA-N. MHS is used in conjunction with AMSU-A and replaces the AMSU-B in the POES series instrument baseline.
IASI (Infrared Atmospheric Sounder Interferometer)
IASI (Interféromètre Atmosphérique de Sondage Infrarouge) is a CNES and EUMETSAT instrument. The IASI program is led by CNES in partnership with EUMETSAT. CNES is prime contractor with technical oversight and responsibility for the entire IASI system and its components: the instruments, the data processing software, and the technical expertise center (Alcatel Space is the prime instrument contractor). EUMETSAT is funding the three recurring models of the IASI instrument. 74) 75) 76) 77)
IASI represents a significant technological and scientific step forward to provide meteorologists with atmospheric emission spectra to derive temperature and humidity. The instrument is designed to measure atmospheric spectra in the infrared. It comprises a Fourier transform spectrometer (FTS) and an associated imager.
The science requirements call for sounding of tropospheric moisture and temperature, measuring column-integrated O3, CO2, CH4, and NO2, and measuring some trace gases which drive the budget of tropospheric chemistry and contribute to the greenhouse effect. Specific objectives are:
• Provision of temperature and water vapor profiles for NWP at accuracies of 1 K absolute or 10% relative, at a high vertical resolution (1 km for water vapor profiles)
• Cloud parameters to be derived from IASI include cloud fraction, cloud top temperature, cloud height, and cloud phase
• Surface skin temperatures over land and ocean are to be derived from IASI along with a surface emissivity characterization over land
• Derivation of trace gases from IASI: ozone profiles and columnar amounts of carbon monoxide (CO), carbon dioxide (CO2), nitrous oxide (N2O), and methane (CH4).
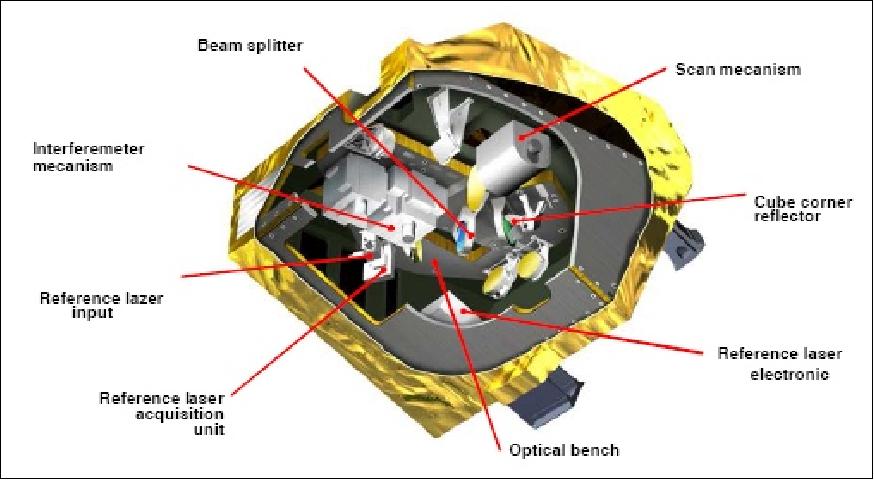
The IASI system aims at observing and measuring twice a day the spectrum of infrared radiation emitted by the Earth from a sun-synchronous orbit, over a swath width of 2000 km. IASI is a nadir-viewing imaging interferometer operating in the SWIR to TIR spectrum from 3.62 (2760 cm-1) to 15.5 µm (645 cm-1) at moderate spectral resolution. The instrument consists of an FTS, based on a Michelson interferometer (the flat mirrors are replaced with retroreflecting corner-cube mirrors), coupled to an integrated imaging system, permitting the characterization of cloudiness inside the FOV of FTS. 78) 79) 80) 81) 82)
Geophysical parameter | Vertical resolution | Horizontal resolution | Accuracy |
Temperature profile | 1 km (low troposphere) | 25 km (cloud free) | 1 K (cloud free) |
Humidity profile | 1-2 km (low troposphere) | 25 km (cloud free) | 10% (cloud free) |
Ozone total amount | Integrated content | 25 km (cloud free) | 5% (cloud free) |
CO, CH4, N2O | Integrated content | 100 km | 10% (cloud free) |
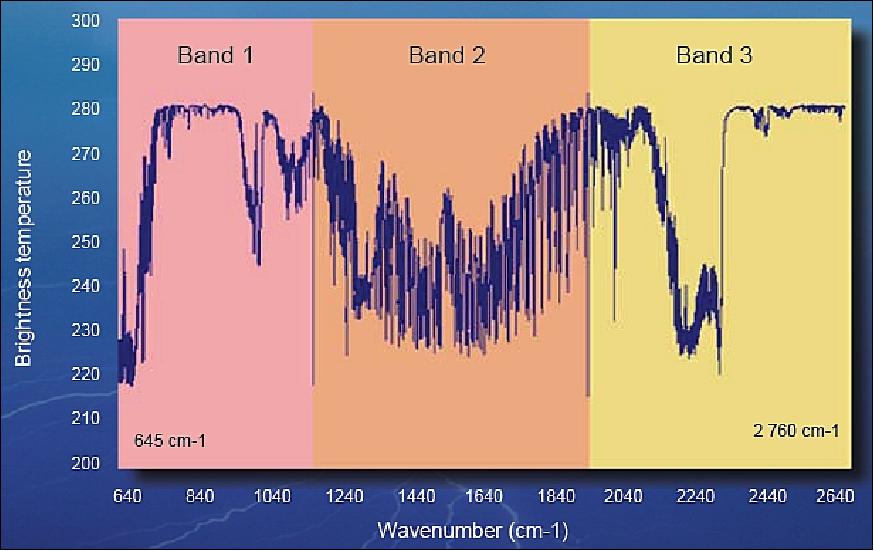
Band | Bandwidth, FWHM resolution | Comment |
Band 1 | 645-1210 cm-1 with 0.35 cm-1 (unapodized resolution) 15.5 - 8.26 µm | Band 1 provides retrievals of temperature profiles and ozone |
Band 2 | 1210-2000 cm-1 with 0.5 cm-1 (apodized resolution) 8.26-5 µm | Band 2 provides retrievals of humidity and some trace gases |
Band 3 | 2100-2760 cm-1 with 1.5 cm-1 (apodized resolution) 5 - 3.62 µm | Band 3 provides retrievals of temperature & some trace gases |
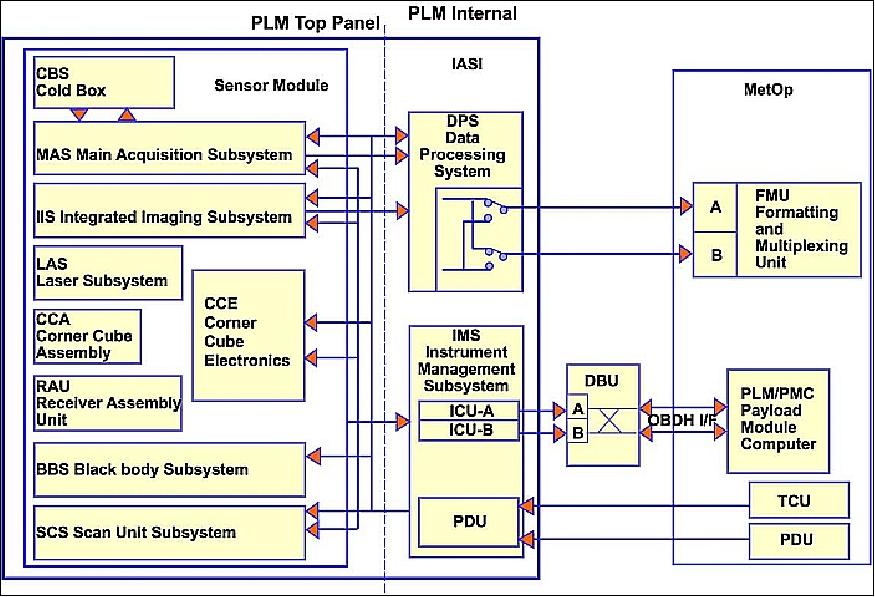
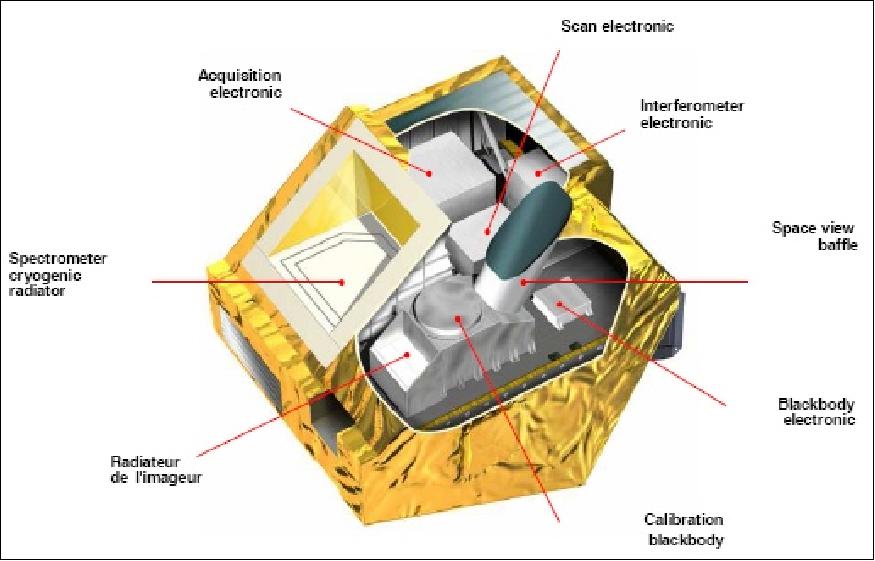
Instrument: The IASI instrument comprises an onboard management unit (sensor module) and a digital processing subsystem which performs the inverse Fourier transform and the radiometric calibration. It includes also an infrared imager in the spectral range of 10.3 to 12.5 µm. The sensor module is composed of the following main elements:
• Off-axis afocal telescope that transfers the aperture stop onto the scan mirror
• A scan mirror that orientates the viewing direction with respect to geometrical and time constraints. Once released, the mirror position is servo-controlled in operating modes. The mirror remains free when the subsystem is not operational.
• An interferometer that divides the incident plane wave into two waves to recombine it after introducing an optical path difference.
• Hot optics which transmit the incoming light through the interferometer into the cold optical part. The hot optics and the interferometer plus the laser elements form the IHOS (Interferometer Hot Optics Subsystem).
• Cold optics including a field stop, which define the instantaneous field of view by four circular holes and which divide the beam into three channels and drives the energy to the detectors.
• The three-detector package is mounted on the back side of the cryo radiator that cools down to 95-100 K, using a three-stage passive radiator to reduce the instrument background and thermoelectronic detector noise.
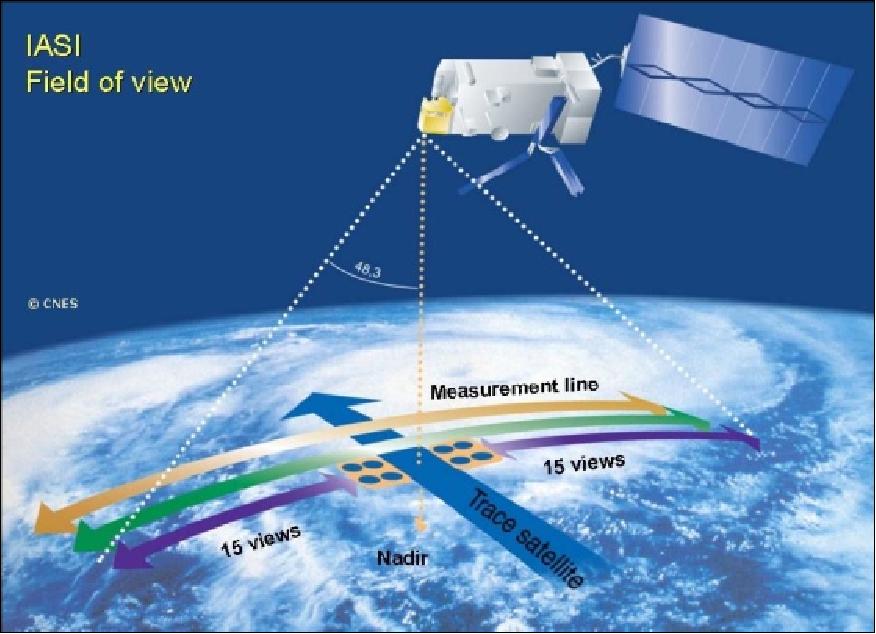
IASI is a whiskbroom instrument which scans in the cross-track direction with a swath width of about 2052 km (FOV =±47.85º, provision of motion compensation within the scan mechanism). During the scan the mirror moves to 30 measurement positions, one every 216 ms. IFOV=3.33 º x 3.33º (about 48 km x 48 km at nadir). Within each mirror position four sub-FOV's are imaged in a 2 x 2 matrix form onto four detectors. Each sub-FOV corresponds to a circular field-of-view of 0.84º (diameter about 12 km at nadir). The total scan period of 8 seconds is coordinated with the AMSU-A scan cycle. A calibration (cold-space viewing and updating of calibration coefficients) is performed after each scan cycle. The calibration accuracy is ≤0.5 K @ 280 K; the inter-channel accuracy ≤0.2 K; NEΔT <0.228 at 280 K for all bands. Band-1 and -2 detectors are of HgCdTe type (photovoltaic), while the band-3 detectors are of InSb type (photoconductive). Data quantization = 12 bit. IASI is considered a preoperational instrument on MetOp-A.
Spectral range | 3.62 - 15.5 µm (2760 cm-1 - 645 cm-1) |
Spectral resolution | 8 to 70 nm (0.35 to 0.5 cm-1) |
FOV (Field of View) | ± 47.85º |
Spatial resolution | 12 km circular |
Sounder size | 1.1 m x 1.1 m x 1.2 m |
Instrument mass | 236 kg |
Power consumption | 210 W |
Data rate | 1.5 Mbit/s average (2.2 Mbit/s peak) |
Reliability, availability | > 0.8 over 5 years, > 97.5% over 5 years |
An important feature of IASI is the high spectral resolution of pressure and humidity sounding despite the fact that nadir measurements are not best suited for vertical resolution. The result (about 2 km for T and humidity) is made possible by the large number of observed spectral elements that depend on temperature and water vapor concentration. This data redundancy is used to reduce the uncertainty of the retrieval and extract information with an improved vertical resolution. It is important to note that the same is not possible for the minor atmospheric constituents (CH4, N2O, SO4, and CO), of which only a few spectral features are observed and for which only a column measurement is possible. In order to retrieve a vertical profile for these constituents a better spectral resolution is required. Typical features of this nadir-sounding instrument are therefore a good horizontal resolution, detection capability limited to the major atmospheric constituents, poor vertical resolution with the exception of those quantities for which large redundancy of measurements is available.
Parameter | IASI (IASI pixel) | AMSU-A | MHS | AVHRR/3 | HIRS/3 (4) |
Mission (s) of instrument flown | MetOp-A, etc. | MetOp-A, NOAA-15,etc. | MetOp-A, | NOAA-15,etc. | NOAA-15,etc. |
Scan type | Step and dwell | Step and dwell | Continuous | Continuous | Step and dwell |
Scan rate | 8 s (8 s) | 8 s | 2.667 s | 0.167 s | 6.4 s |
Sampling | 216 ms (216 ms) | 200 ms | 19 ms | 0.025 ms | 100 ms |
Scan separation | 52.69 km (23.81) | 52.69 km | 17.56 km | 1.1 km | 42.15 km |
Pixels/scan | -, (120) | 30 | 90 | 2048 | 56 |
IFOV | 3.33º (0.84º circular) | 3.3º circular | 1.1º circular | 0.0745º square | 0.69º circular |
IFOV at nadir | 47.63 km, (12 km) | 47.63 km | 15.88 km | 1.1 km | 10.0 km |
IFOV edge cross-track (km) |
|
|
|
|
|
FOV | ±48.33º (49.16º) | ±48.33º | ±49.44º | ±55.37º | ±49.5º |
Swath (km) | 2052, (1228) | 2052 | 2134 | 2900 | 2160 |
The IASI onboard processing system generates calibrated atmospheric spectra from raw interferograms. Interferograms are digitized with a 16 bit resolution by the acquisition electronics and processed by the DPS (Digital signal Processing Subsystem). These spectra are ready for assimilation by users and are processed (within the onboard DPS unit) and by the associate ground segment. The following onboard functions are performed: spike elimination, non-linearity corrections, filtering and resampling, Fourier Transform, phase correction, scan mirror reflectivity correction, radiometric calibration, and variable coding. Onboard processing reduces the instrument source data rate from 45 Mbit/s to 1.5 Mbit/s (note: the interferogram of 45 Mbit/s is converted into a complex spectrum to meet the allocated data rate of 1.5 Mbit/s). 84)

The IASI instrument has a data rate of 1.5 Mbit/s, a design life of 5 years, power consumption of 210 W, a size of : 1.2 m x 1.1 m x 1.1 m, and a mass of 236 kg. The instrument features an onboard management unit and a digital processing subsystem which performs the inverse Fourier transform and the radiometric calibration.
IASI Infrared Imager, also referred to as CIM-01 (Caméra Infra-rouge Multimission). The IASI instrument includes also an infrared imager in the spectral range of 10.3 to 12.5 µm (atmospheric window) to improve the processing of partly cloudy pixels. The infrared imager enables accurate collocation between IASI and AVHRR/3 (both on MetOp) for cloud analysis (co-registering of soundings with AVHRR/3 images). The IFOV of the infrared imager coincides with that of IASI, namely 3.33º x 3.33º, the FOV is covered by a raster of 64 x 64 pixels (size of detector matrix). The radiometric performance is characterized by NEDT of 0.5 K at 280 K and a calibration accuracy of better than 1 K at 280 K. The positioning error of imager pixels with respect to the pixels of IASI is less than 0.05º. 85)
Parameter | Value | Parameter | Value |
FOV | 60 mrad x 60 mrad | Spatial resolution | 64 x 64 pixels |
Spectral range | 10.3 - 12.5 µm | Optics speed | f/2.4 |
Image frequency | 4.6 Hz | NEDT | < 0.5 K @ 280 K |
Measurement dynamic | 175 to 315 K | Blind pixels | < 20 |
MTF @ Nyquist | 0.35 | Linearity | < 1% |
Response non-uniformity | < 5% (1σ) | Distortion | < 0.2 mrad |
The imager design (EADS Sodern) includes two subassemblies: 1) the optical module including lens and detector, 2) the electronic module. The technology features an uncooled microbolometer array in the focal plane. The detector is a standard COTS uncooled infrared sensor assembly, U3000A, manufactured by DRS Technologies Inc. (formerly Boeing/Rockwell). The instrument has a mass of 5.5 kg, power consumption of 8 W, and video output data of 12 bit. Apart from the IASI program, a modified version of this imager is also flown on the CALIPSO mission as IIR (Imaging Infrared Radiometer).

The CNES role in IASI: 86)
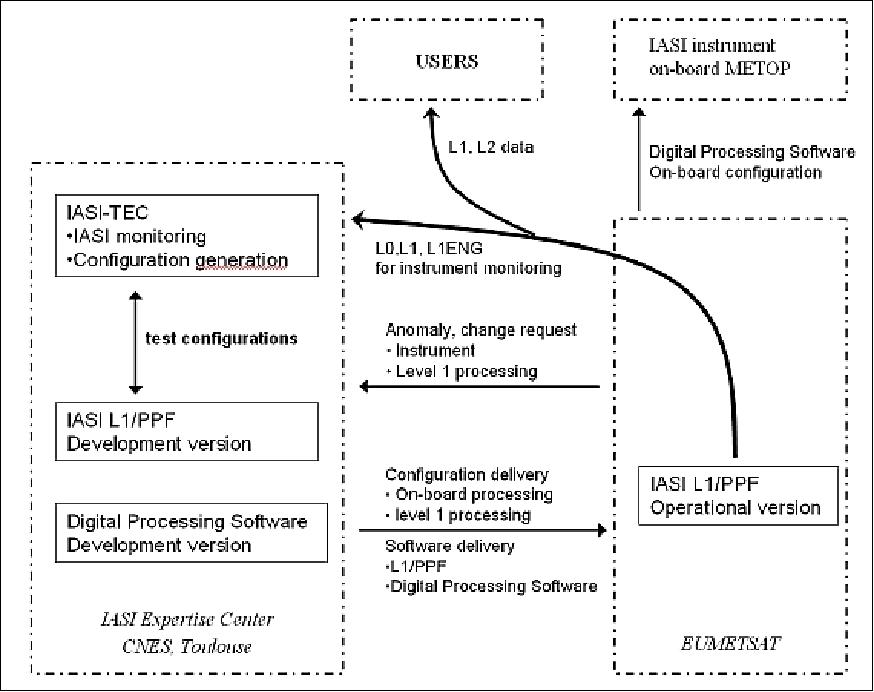
CNES has technical oversight responsibility for the instruments development up to their deliveries to EUMETSAT. Moreover, CNES has developed the onboard processing software DPS ((Data Processing Software), the level 1 processing chain (L1/PPF) and the software deployed at the IASI expertise center (IASI-TEC) located in Toulouse. During the exploitation phase, CNES is responsible for the instrument calibration, it operates IASI-TEC and maintains the IASI L1/PPF. The latter is operated by EUMETSAT in Darmstadt (Germany).
The IASI system is composed of the on-board segment (the instrument and the associated on-board processing software), the ground segment (the level 1 processing chain) and the IASI-TEC. The latter is in charge of the instrument performance monitoring, performance-related anomaly investigation, the development and validation of new algorithms and the maintenance of the on-board and ground software. The IASI system relies on the CNES-EUMETSAT cooperation. The main interfaces between the IASI expertise center and EUMETSAT are presented in Figure 45.
As of 2010, the IASI-TEC has continuously and rigorously monitored the IASI instrument onboard MetOp-A for more than 3 years. It plays a key role in maintaining the whole IASI system performance. Using the feedback from the instrument commissioning phase, a monitoring strategy has been defined for the routine phase. This allows to report that the instrument is actually behaving very well: radiometric, geometric and spectral performances are all compliant with the specifications. Generally speaking, the instrument is very stable over time.
IASI Status in the Fall of 2011
In the 5 years of operational service so far, IASI has provided valuable new data, allowing important new developments in the fields of NWP and atmospheric composition analysis. The excellent calibration and stability of the instrument, and the expected long time series of data, indicate that it will also make important contributions to climate studies. New applications for IASI are still emerging as the data are investigated more thoroughly. 87)
IASI has given significant positive forecast impact at NWP centers in both global and regional models, with data at a higher vertical resolution than has been seen before from an operational sounder. Unlike older operational sounders, significant amounts of IASI data can be used in cloudy conditions; nevertheless, more progress needs to be made to get closer to extracting the full information content in the observations.
IASI has also provided unprecedented atmospheric chemistry data, allowing near-real-time mapping of chemical species and aerosols, contributing to air traffic safety and to our understanding of atmospheric transport processes. Observations from IASI have unexpectedly allowed the detection from space of volatile chemical species, providing an ability to map sources and sinks of gases, such as ammonia.
IASI exhibits sensitivity to the change in quantities of greenhouse gases. The data can be used to study cloud and aerosol properties, and will provide information on a range of other climate variables. It is expected that IASI will gather real-time information about the atmospheric state at higher vertical resolution, notably moisture and winds, and thus will form a critical component of the global observing system for climate studies.
GOME-2 (Global Ozone Monitoring Experiment-2)
GOME-2 is a medium resolution, nadir-viewing and cross-track scanning spectrometer of GOME-1 heritage flown on ERS-2 (launch 1995). GOME-2 measures the solar radiation transmitted or scattered from the Earth's atmosphere or from its surface. The ESA/EUMETSAT jointly-funded instrument was designed and built by the prime contractor Galileo Avionica, Italy.
The overall objectives of GOME-2 are: measurement of total column amounts and stratospheric and tropospheric profiles of ozone. In addition: measurement of column amounts of H2O and other trace gases involved in ozone photochemistry (like NO2, OClO, BrO, and possibly ClO in polar spring conditions, and pollutants like SO2 and HCHO). GOME can also be used to investigate the distribution of atmospheric aerosols and clouds-plus-surface spectral reflectance. Atmospheric chemistry is of vital importance in the evolution of the planetary climate, and an indicator in particular of anthropogenic impacts on the atmosphere. 88)
Although GOME-2 is considered a "recurrent" instrument (the basic design of GOME-2 being the same as that of GOME-1), a number of technical improvements were made based on the experience with GOME-1 operations and data analysis and in response to more stringent user requirements. Particular improvements concern spatial resolution, polarization measurements, and calibration.

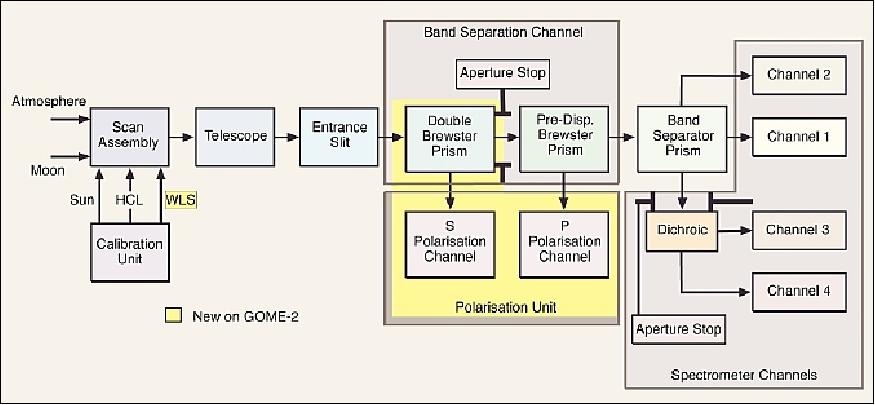
The GOME-2 instrument consists of the following modules or units: 89) 90)
• Double grating spectrometer (one each for polarized and unpolarized light): almost identical to the GOME-1 instrument. The major change for the GOME-2 spectrometer resulted from the accommodation of the more complex PMU (Polarization Monitoring Unit) on GOME-2. The main spectrometer (for unpolarized signal) splits the incoming light into four channels. It does this by a complex array of telescopes and prisms. Detectors at the end of each optical path collect information about the signal in each channel.

• PMU (Polarization Monitoring Unit): The new PMU provides polarization information (with sufficient accuracy to correct for the polarization dependence of the instrument) by monitoring the spectral range using 200 pixels with a spectral resolution of between 2.8 to about 40 nm, the integration time is 23 ms. The s- and p-polarized parts of the radiation are measured simultaneously. The s- and p-channels have an identical FOV with the main channel. Note: other major ozone measuring instruments like TOMS, SBUV and OMI disregard the measurement of polarization.
• FPA (Focal-Plane Assembly). There are a total of six FPAs, four are assigned to the spectrometer channels and two to the new polarization channels. Each FPA contains a random-access linear silicon photodiode array, consisting of 1024 elements, which is reverse-biased and operates in charge accumulation mode. The detectors are cooled to -38º C for the spectrometer channels and to 0º C for the PMU channels.
• SU (Scan Unit): SU features a rotating mirror, positioning in front of the spectrometer. The mechanical assembly is almost identical to that of GOME-1. The electronics assembly of GOME-2 allows five constant scan profiles and five new scans, compensating for the Earth's curvature and providing a constant linear scan speed on the ground. A new wide-amplitude scan corresponding to 1920 km on the ground, is also implemented. The wider swath permits global coverage in 1.5 days. All scans are reprogrammable. The basic scan timing is 4.5 s in the forward and 1.5 s in the flyback scan.
• CDHU (Command and Data Handling Unit): A processor is responsible for all ICU (Instrument Control Unit) functions such as command handling, maintenance of history file, monitoring of instrument parameters and format handling. CDHU provides 12 predefined timelines, each dedicated to a specific orbit sequence.
• CU (Calibration Unit): The unit contains two light sources (spectral light and white). The white light source is used to monitor the etalon, present on the cooled detectors. The spectral light source is a hollow cathode lamp filled with a mixture of neon and argon. The calibration unit has in addition a diffuser in support of solar calibrations.
Principle | Nadir-scanning UV/VIS grating spectrometer | |
Spectrometer type | Double monochromator with pre-disperser prism and 4 holographic gratings | |
Spectral range | 240 - 790 nm (UV, VIS) | |
IFOV (Instantaneous Filed of View) | 0.286º cross-track x 2.75º along-track, or 4 km x 40 km respectively | |
Entrance slit dimension | 0.2 mm cross-track x 9.6 mm along-track | |
Channels and resolution | 1: 240 - 315 nm | 0.22 - 0.28 nm (FWHM spectral resolution) |
Polarization | 256 detector pixels | |
Monitoring unit | 312 - 790 nm in 12 programmable bands | |
Viewing modes |
| |
Spectral calibration | Fixed angle (once per day to once per month) | |
Spatial resolution | 40 km x 40 km (with 960 km swath and integration time of 0.1875 s) | |
Detectors | 1024 element Reticon linear diode arrays | |
Instrument data rate | 400 kbit/s | |
Instrument mass, power | 73 kg, 42 W (average) | |
Instrument size | 656 mm (zenith, nadir) x 848 mm (cross-track) x 468 mm (along-track) | |
Measurement concept: Grating spectrometers like GOME are sensitive to the state of polarization of the incoming radiation. The light reflected by the Earth's atmosphere is partially polarized, the degree of polarization varying with the atmospheric conditions and the geometric relation between the sun and the line of sight. This effect would cause the instrument radiance responsivity to vary accordingly. However, to overcome this effect, GOME-2 measures the intensity of the plane polarized light in two orthogonal polarization planes (parallel and perpendicular to the entrance slit), in 15 bands in the 240-790 nm spectral range with a resolution of 0.22-0.50 nm. The Double Brewster/Pre-disperser combination separates the two orthogonal components of light from the main beam. There are two PMDs (Polarization Measurement Device), one for each polarization component, being both identical. By means of prisms and lenses each polarized beam is dispersed and focussed onto the PMD Focal Plane. The response of the instrument to the linearly polarized light is determined during instrument calibration. This allows correction of the main channel measurements for the polarization sensitivity of the instrument. It is assumed that the instrument sensitivity to the state of polarization of the non-linearly polarized light is negligible.

GRAS (GNSS Receiver for Atmospheric Sounding)
GRAS was designed and developed in a joint effort by Saab Ericsson Space (SES) of Sweden and AAE (Austrian Aerospace), co-funded by ESA and EUMETSAT. The objectives are to provide atmospheric temperature and humidity profiles. The data may be used in such applications as NWP (Numerical Weather Prediction) models. RO (Radio Occultation) of the atmosphere is a well-proven technique whose performances have been demonstrated for Earth atmospheres by GPS/MET and its successor TRSR, both instruments were developed at JPL. 91) The measurement principle is based on the fact that microwave signals passing through the atmosphere up to a LEO satellite at the limb are bent and delayed due to the variations of the refractive index of the various layers of the atmosphere and the ionosphere. The refractive index depends upon the pressure, temperature and humidity of the atmosphere. 92) 93) 94) 95) 96) 97) 98) 99) 100)
Note: At the start of the GRAS project, the initial goal was to use both the GPS and the GLONASS constellations. However, during the course of the MetOp phase B, GLONASS capabilities have been descoped resulting in an implementation which considers only the GPS tracking capabilities.
GRAS is a dual-frequency GPS high-performance instrument with semi-codeless operating capabilities. The codeless capability is mandatory in order to mitigate the anti-spoofing (encryption of the precise code), which prevents civilian users from benefitting from the P-code on the L2 frequency. The instrument provides carrier, code phase and signal amplitude measurements. The second GPS frequency (L2) is used for ionospheric correction of the signals. GRAS features twelve dual-frequency channels, four for rising and setting occultations and eight for navigation. The navigation channels provide the position of the MetOp satellite in real-time. Carrier and code phase data are also provided for the processing of the precise orbit determination of MetOp (position and velocity) necessary for the ground processing of the occultation data and in particular the effects on the Doppler caused by the GPS signal passing through the atmosphere and the troposphere. A ground network of GPS receiver tracking stations is used for determining the actual orbits of the GPS satellites. This ground network can operate in differential mode in order to cancel clock error variations. - The GRAS instrument consists of the following elements:
• Antennas. The three GRAS antennas are pointed in the satellite's velocity, anti-velocity, and zenith directions. The GVA (GRAS Velocity Antenna) and the GAVA (GRAS Anti-Velocity Antenna) are phased arrays, each containing 18 dual-band patches with a shaped antenna pattern optimized for the occultation of the Earth's limb and its atmosphere. The GRAS zenith-looking antenna (GZA) with eight dual-frequency channels is used for navigation measurements. 101) 102)
• RFCU (RF Conditioning Unit). Each of the three RFCUs consists of two extremely steep bandpass filters, a low-noise amplifier and a single down-converter stage to IF (Intermediate Frequency). The IF signals are fed into the GEU.
• GEU (GRAS Electronics Unit). The GEU is built around the ESA-developed AGGA (Advanced GPS/GLONASS ASIC). 103) The AGGA simultaneously performs the final down-conversion, de-spreading, and correlation of four dual-frequency GNSS channels. A number of AGGA observables are delivered to the TSC2102OE DSP, an ESA-funded Digital Signal Processor which performs the functions of: measurement, signal tracking, navigation solution, time management, and measurement data processing.

The GRAS DSP board is based on the radiation tolerant TSC 21020 processor. The DSP board is used to control the instrument and to perform all onboard data processing. The processed and formatted data is provided to the spacecraft OBDH (Onboard Data Handling) bus via the SCIF (Spacecraft Interface) board.
Parameter | Value | Parameter | Value |
Measured temperature accuracy | 1 K | Horizontal resolution | 100 to 300 km |
No of occultation channels (set+rise) | 4 | Vertical resolution Fresnel zone | 300 to 1500 m |
No of navigation channels | 8 | High vertical resolution (troposphere) | 100 m |
No of occultations/day | 500 | Navigation solution accuracy | 100 m |
USO frequency stability | 1 x 10-12 | Bending angle budget @ 30 km | 0.42 µrad |
Instrument mass | 30 kg | Instrument data rate (mean, max) | 27 kb/s |
Occultation antennas |
| Navigation antenna |
|
The GRAS instrument provides more than 500 occultations/day, with quasi-uniform geographical distribution, a vertical temperature sounding of 1K rms, with a vertical resolution of 100 m in the troposphere and 1.5 km in the stratosphere over an altitude range of 5 to 30 km. In addition, GRAS provides an opportunity to establish the height of the tropopause with a vertical accuracy of better than 1 km. The horizontal resolution of the radio-occultation technique, limited by the limb-sounding approach itself, is in the order of 100 km in the troposphere and 300 km in the stratosphere. 104)
Level-1 products | Level-2 products |
Residual phase data | Refractivity profiles |
Sounding occultation table | Temperature profiles |
Navigation data | Moisture profiles |
Total bending angle as a function of the impact parameter at L1 and L2 | Pressure profiles |
Ionospheric corrected total bending angle | Integrated precipitable water vapor |
TEC | Temperature and humidity retrieval parameters |
Auxiliary data | Observation error characteristics |
Earth orientation parameters | TEC |
Observation error characteristics |
|
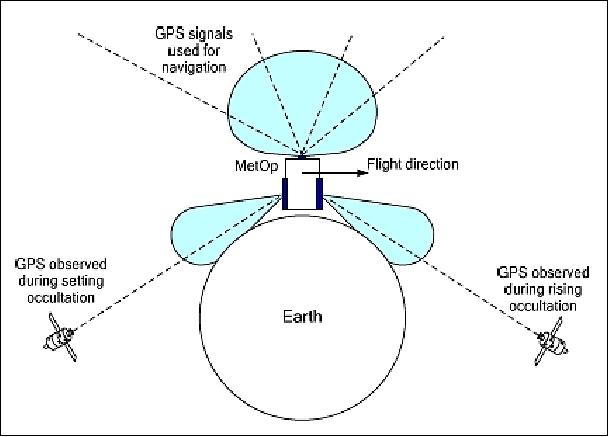
GRAS ground segment: The GRAS SAF is part of EUMETSAT's network of Satellite Application Facilities (SAFs) under the EUMETSAT Polar System (EPS). The objective of the GRAS SAF is to deliver operational radio occultation products from the GRAS occultation instruments (Global Navigation Satellite System Receiver for Atmospheric Sounding) onboard the three MetOp satellites. The leading entity is the Danish Meteorological Institute (DMI) and this is also the physical location of the operational GRAS SAF processing and archiving center. The other project partners are: 106) 107)
• IEEC (Institute d'Estudis Espacials de Catalunya, Barcelona, Spain)
• Met Office (Exeter, UK)
ECMWF (European Center for Medium-range Weather Forecasts), UK
The GRAS SAF started the operational phase in March 2007. The archiving of GRAS SAF products is done locally at DMI. The role of the GRAS SAF is to facilitate the input from the GRAS instrument on MetOp to NWP and climate change models in order to increase the usage of satellite data in a more effective manner than possible today.
The main users of the GRAS SAF products are meteorologists doing data assimilation, and users from the climate research and atmospheric science communities, needing comprehensive, globally distributed temperature, pressure, and humidity information. The products come in two types:
• Near-Real Time (NRT) products, disseminated less than three hours after acquisition (primarily for NWP use)
• Improved Offline Products, available less than 30 days after acquisition (primarily for climate research use).
An enhanced version of the GRAS instrument, called GPSOS (GPS Occultation Sensor), will fly on the JPSS (Joint Polar Satellite System) series of NOAA and NASA.
Argos / A-DCS (Advanced Data Collection System)
Argos/A-DCS is an advanced Argos system (also flown on NOAA-N') and provided by NOAA. The objectives are data collection and location from PTTs (Platform Transmitter Terminal) and DCPs (Data Collection Platform) in the ground segment PTTs and DCPs are both part of the Argos ground segment for environmental data measurement. 108)
Argos/A-DCS is also known as Argos-3, the new generation Argos system — and MetOp-A is the first LEO spacecraft on which Argos-3 is being flown. Argos-3 provides enhanced and new capabilities in data collection. In particular, this relates to higher data rates between the spacecraft and the ground segment, and to the new downlink capability. This means, that PTTs (with the required capability) can now be configured via the spacecraft. 109)
The A-DCS unit is provided by CNES for flight on the MetOp mission. The Argos system is operated and managed by CLS (Collecte Localisation Satellites), a CNES subsidiary in Toulouse, France, and Service Argos Inc., a CLS subsidiary in Landover, MD, USA.
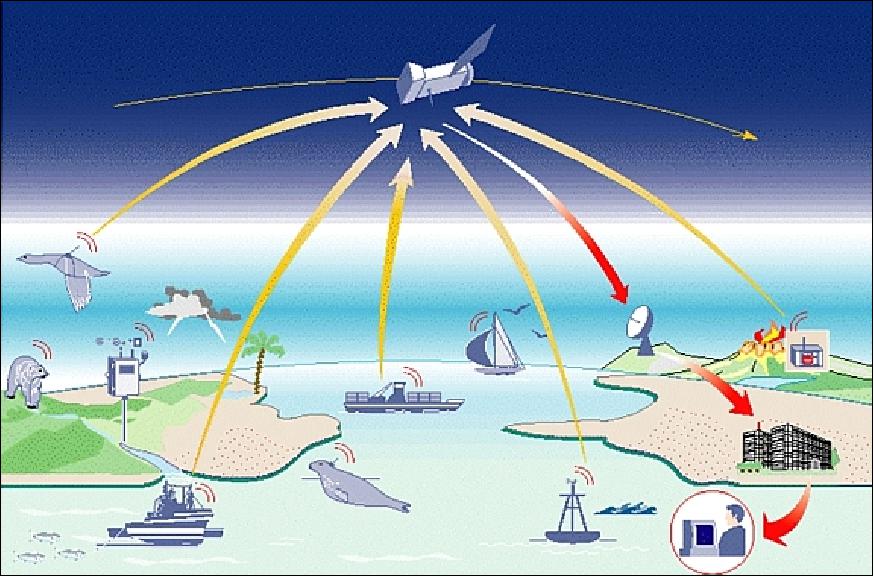
The primary objective of a DCS is the collection and dissemination of data for the scientific community, through the measurement of temperature, pressure, humidity, sea levels and location. The data are then transmitted to the user community through the Argos network. Flying the Argos system aboard polar-orbiting satellites provides worldwide coverage. Additionally, incorporating the A-DCS instrument on a moving satellite allows for locating an in-situ platform using Doppler shift calculations. This positioning capability permits applications such as monitoring drifting ocean buoys and studying wildlife migration paths.
The system is used with great success in the following applications:
- Studying oceans and atmospheric conditions
- Preserving and monitoring wildlife
- Monitoring volcanoes
- Monitoring fishing fleets
- Monitoring shipments of dangerous goods
- Humanitarian applications
- Managing water resources.
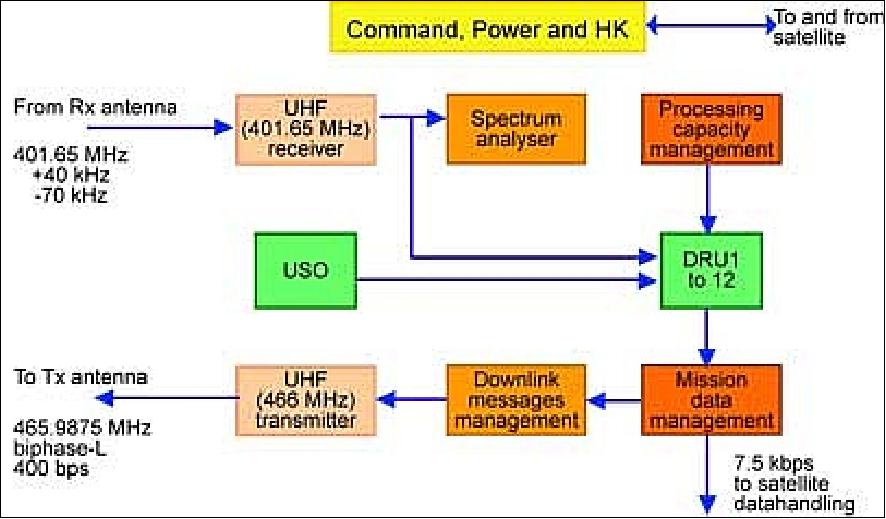
S&RSAT (Search&Rescue Satellite Aided Tracking System)
The S&RSAT payloads are part of an international cooperative satellite-based radiolocation system (COSPAS-S&RSAT) to support search and rescue operations for aviators, mariners, and land travellers in distress. The S&RSAT payload consists of S&RR (S&RSAT Repeater), provided by CRC/Canada; and S&RP (S&RSAT Processor), provided by CNES/France). 110) 111)
Spacecraft Repeater (121.5, 243, and 406 MHz) | |
Bandwidths (Doppler shift + drift + Tolerance + guardband) | |
Parameter | Specification |
121.5 MHz | 25 kHz (bandwidth) |
243 MHz | 46 kHz |
406.050 MHz | 100 kHz |
Transmitter power (1,544 MHz) | 8 W decibels referenced to a watt (dBW) |
Physical Characteristics | |
Mass, size, power | 24 kg, 0.034 m3, 53 W |
Spacecraft 406 MHz Processor | |
Max bandwidth, storage capacity, output data rate | 80 kHz, 324 kbit, 2.4 kbit/s |
Physical characteristics | |
Mass, size, power | 27.5 kg, 0.034 m3, 33 W |
The communication link specification for the Argos/A-DCS and S&RSAT services are:
• A-DCS data reception at 401.65 MHz
• A-DCS data transmission at 466 MHz
• S&RR beacon signal repetition at 121.5 MHz, 243 MHz, and 406.05 MHz
• S&RP-3 data reception at 406.05 MHz (common with S&RR)
• S&RR data transmission at 1544.5 GHz.
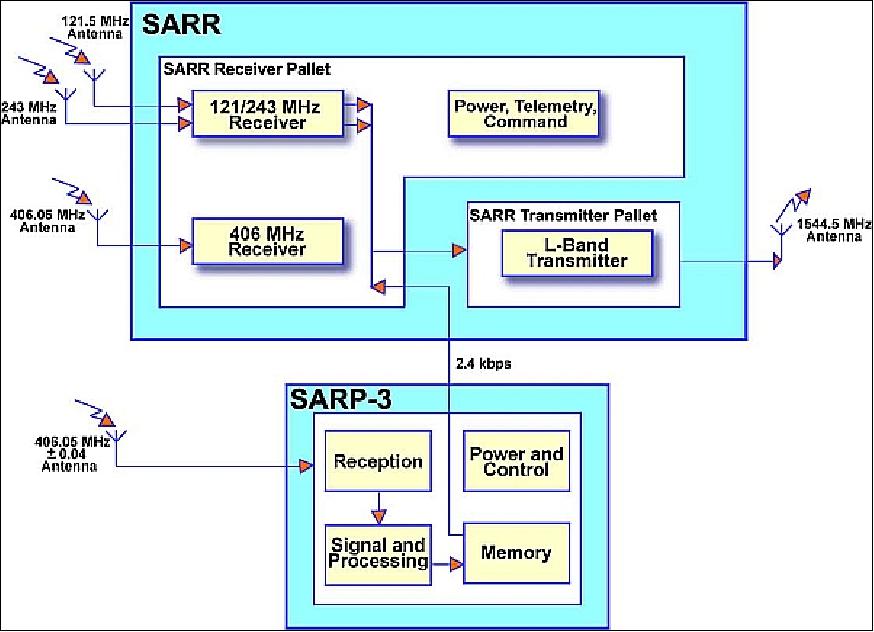
Note: Although the original acronym for `Search and Rescue' is `SAR' in the context of NOAA (or MetOp) missions, it was changed in this documentation consistently to `S&R' in order to distinguish it from the other widely-used meaning of SAR, namely `Synthetic Aperture Radar,' an active sensor type and observation technique. A consequence is the use of `S&RSAT' (instead of SARSAT), to use S&RP instead of SARP, as well as to use S&RP-3 instead of SARP-3.
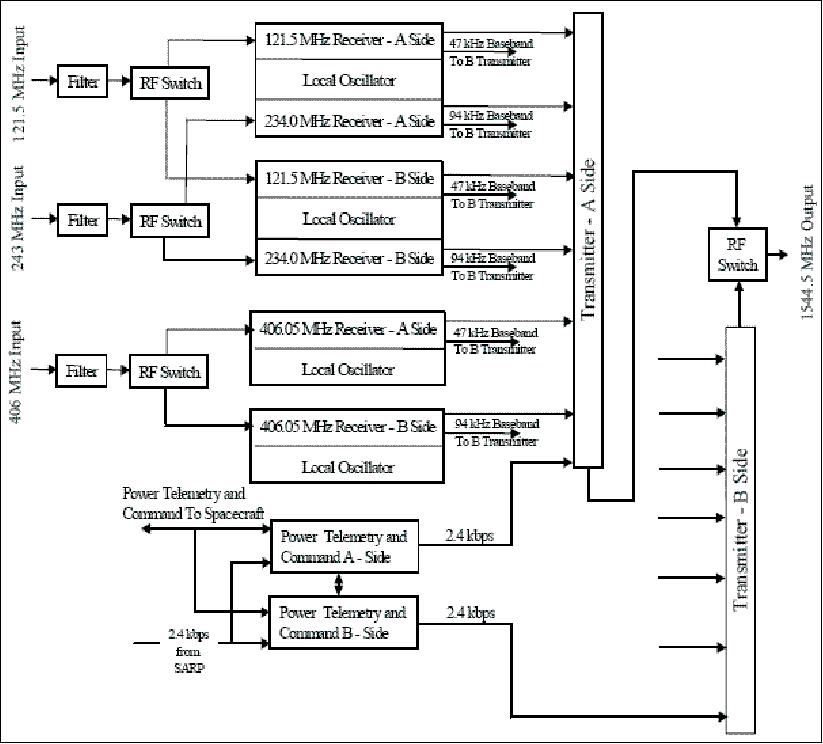
Argos program and its future: After the current in-orbit commissioning phase performed by CNES & CLS, this new Argos-3 instrument onboard MetOp-C will provide geopositioning and data collection services to nearly 20,000 active Argos PTTs (Platform Transmitter Terminals) deployed worldwide. These miniaturized transmitters relay precious data about the world's oceans, atmosphere and animal life from anywhere on the globe. Argos users can expect to receive data collected by MetOp-C sometime early in 2019. 112)
This satellite (MetOp-C) is a welcome addition as the seventh Argos satellite to our constellation. It is the fifth (and final) Argos-3 instrument to be launched by the international space agencies before launch of the next generation of Argos technology, Argos-4, begins.
Seven operational satellites. The Argos constellation is composed of:
• 2 satellites with Argos-2 instruments onboard (NOAA-K, NOAA-N)
• 5 satellites with Argos-3 instruments onboard (SARAL, MetOp-A,B,C, NOAA-P)
Looking to the future: The next generation of Argos, Argos-4, will begin to launch at the end of 2019. In addition of the ascending compatibility and the two-way capability, the main benefits of Argos-4 technology are an increased bandwidth, an enhanced capacity and new adapted modulations for wildlife tracking or high data rate transmissions . Argos-4 will make it possible to send ever more data even more efficiently, improving performance for existing applications as well as opening the door for a host of new ones.
Launch Schedule for Next Argos Satellites
• CNES will launch ANGELS (Argos NEO Generic Economic Light Satellites), the 1st Argos nanosatellite prototype in 2019
• The Indian Space Agency (ISRO) will launch the first Argos-4 instrument on OceanSat-3 satellite by end 2019
• US Congress and President have approved the CDARS (Cooperative Data and Rescue Services) program budget with an Argos-4 payload
• EUMETSAT is committed to launching Argos-4 payloads onboard European Meteorological satellites until 2036
• Kinéis, subsidiary of CLS will launch new connectivity based on a constellation of 20 dedicated nanosatellites, fully compatible with Argos, starting end 2021.
SEM-2 (Space Environment Monitor-2)
SEM-2 is a NOAA-provided instrument package (see description under NOAA-POES series). The SEM-2 instruments are being developed/built by Panametrics Inc., in Waltham, MA. SEM-2 is a spectrometer that provides measurements to determine the intensity of the Earth's radiation belts and the flux of charged particles at the satellite altitude. It provides knowledge of solar terrestrial phenomena and also provides warnings of solar wind occurrences that may impair long-range communication, high-altitude operations, damage to satellite circuits and solar panels, or cause changes in drag and magnetic torque on satellites. SEM-2 has three major components:
• TED (Total Energy Detector)
• MEPED (Medium Energy Proton and Electron Detector)
• DPU (Data Processing Unit)
TED measures electron and proton energy fluxes in the 0.05 to 20 keV energy range. Two independent measurements of the particle energy flux are being made at 0º and 30º from the local vertical. The MEPED provides both directional and omni-directional measurements. The directional sensors, make independent measurements of electrons and protons in several energy intervals. The omni-directional sensors measure proton energy in the following ranges: > 16 MeV, > 35 MeV, > 70 MeV and > 140 MeV.
SEM-2 is a multichannel, charged-particle spectrometer that measures the population of the Earth's radiation belts and the particle phenomena resulting from solar activity (both of which contribute to solar/terrestrial energy interchange). SEM-2 consists of separate sensor units and a common DPU (data processing unit). The sensor units are TED, MEPED, and HEPAD (occasionally). The lower-energy detectors (TED, plus the proton and electron telescopes of MEPED) have pairs of detectors with different orientations because the direction of the particle fluxes is important for characterizing the energy interchanges taking place. Objectives:
- To determine the energy deposited by solar particles in the upper atmosphere
- To provide a solar storm warning system. Large, abrupt changes occur in the solar wind. These changes produce changes in the magnetosphere and the ionosphere. This can result in hazards to people such as astronauts, there is also the potential of increased radiation exposure to people in high flying aircraft. Other functions/facilities on Earth effected by solar wind changes are: a) disruption of navigation, b) absorption, even blackout, of radio waves so that radio communication is disrupted; c) induced voltages and currents in electric power circuits leading to circuit breaker trip, damage to equipment, and failure of transformers; d) induced currents in buried pipe lines causing accelerated corrosion; e) damage by electrons and protons to satellite circuits and solar panels.
SEM-2 units | Performance requirements | Energy levels | FOV (Field of View) |
TED | Determine heat energy input into upper atmosphere from absorption of electrons, protons and positive ions. | Electrons: 0.05-20 keV | Two at 15º full angle, |
MEPED | Same as TED | Electrons: 30-7000 keV | 15º full angle, |
DPU | Combine outputs into a 2-second, 40-word format. Provide command, calibrate and timing interfaces. | N/A | N/A |
Instrument | Mass = 15 kg, power = 10 W, volume = 0.0186 m3, telemetry = two 8-bit wors/TIP minor frame | ||
TED (Total Energy Detector). TED measures the proton and electron fluxes in 16 bands in the 0.05 to 20 keV energy range. Two independent measurements of the particle energy flux are made at zero and 30 degrees from the local vertical. The total energy
measurement is divided into two ranges: 0.05 to 1 keV and 1 to 20 keV and each measurement is made independently for electrons and protons. TED also measures the maximum differential energy flux density and the energy at which it occurs for each direction and particle type (electron and proton). TED consists of eight Electrostatic Analyzers (ESA), pulse height discriminators (PHD), an In-Flight Calibrator (IFC), two high voltage (HV) supplies, a sweep voltage supply and housekeeping circuits. 113)
MEPED (Medium Energy Proton and Electron Detector). MEPED provides both directional and omni-directional measurements. The directional sensors utilize telescopes which make independent measurements of the particle types. Directional measurements are made near the local vertical and near 90º to the local vertical. Protons are measured in 6 bands in the energy range: 30 to >6900 keV. Electrons are measured in thee bands: >30 to > 300 keV. The omni-directional sensors measure proton energy in the following ranges: >16 MeV, >35 MeV, >70 MeV and >140 MeV. Each sensor consists of a dome of moderating material which absorbs energy from the particle (and so sets the detection energy threshold), a silicon solid state detector, a preamplifier, and a level comparator which responds to particles with enough energy to go through the moderator and produce a pulse from the detector large enough to exceed the level in the comparator.
The MEPED instrument consists of two proton telescopes, (each containing two solid state detectors (SSDs)), two electron telescopes (each containing a single solid state detector and four omni-directional sensors (each containing a single solid state detector), charge-sensitive preamplifiers, analog signal processors, proton and electron coincidence logic, in-flight calibrator, low-voltage regulators, SSD bias supply and analog housekeeping. The SEM-2 instrument package has a mass of 18 kg, power of 6 W, and a data rate of 166 bit/s.
Instrument envelope | TED: 184 mm x 314 mm x 193 mm |
Instrument mass | TED: 4.7 kg |
Instrument power | < 10 W |
Data rate | 160 kbit/s |
EPS (EUMETSAT Polar System) Overview
EPS is the European component of a joint European/US polar satellite system, the Initial Joint Polar System (IJPS) to support operational meteorology and climate monitoring. The objective of the IJPS is to share the operations between NOAA and EUMETSAT and to ensure the continuity and timely availability of meteorological data through a series of polar orbiting satellites with a mid-morning equator crossing time of 09:30 h (Europe) and an afternoon equator crossing time of 14:00 h (USA).
The main elements of the system are Space Segment and OGS (Overall Ground Segment). The Space Segment consists of the MetOP satellites and the ground-based support infrastructure. The OGS includes all ground equipment necessary to support the EPS mission in routine operation. The OGS generates data and products from both NOAA and MetOp satellites and disseminates these data to its own user community. The EPS OGS is responsible for the operation and processing of data from the MetOp satellites, whilst the EPS and the NOAA ground segments share the acquisition task for the global data from both NOAA and MetOp satellites according to orbit visibility from their respective ground stations.
The OGS consists of the CGS (Core Ground Segment), the complementary elements, and the service infrastructure. CGS contains all functions for mission and spacecraft control, data processing and product generation, product quality control, online calibration, product dissemination, and archiving. The complementary OGS elements include functions that are required for the EPS mission, but that may also be shared by other missions. These elements include e.g. the UMARF (Unified Meteorological Archive and Retrieval Facility), SAFs (Satellite Application Facilities), and CAL/VAL (Calibration and Validation Facilities). The SAFs are also considered distributed elements of the data processing chain as they will generate the level 2 and level 3 meteorological and geophysical products.
The OGS infrastructure includes also GSN (GRAS Ground Support Network). The products from the GSN service include GPS position and velocity vectors, GPS and fiducial ground station clock offset estimates, GPS tracking data from the fiducial stations, Earth Orientation Parameters (EOP), Tropospheric Zenith Delay (TZD) estimates for each fiducial station, and Sounding Support Data (SSD) of the occulting GPS satellites to allow single or double differencing in the occultation processing. The GSN also handles all interfaces to the 20-30 globally distributed fiducial stations needed to collect the GPS tracking data and SSD. - All GSN products and MetOp GPS POD (Precise Orbit Determination) products will be archived and made available to the users.
EUMETSAT computes operationally the NRT (Near-Real-Time) precise orbit of the MetOp-A satellite using both the data provided by the GRAS (GNSS Receiver for Atmospheric Sounding) instrument and support data provided by the GSN (GRAS Ground Support Network). 114)
• The GSN, operated by ESA/ESOC, provides in NRT a set of precise GPS products (GPS ephemerides and high frequency satellite clock corrections) as well as other support data (i.e. Earth Orientation Parameters) which are used as input data for different NRT LEO POD processes. These products are subjected to very stringent requirements in timeliness and reliability, to ensure the required service to the meteorological community (99% of availability within 3 hours).
• The RECTILE (Real Time Clock Estimation) system, operated by the DLR GSOC (German Space Operations Center), provides in real time a set of precise GPS clock corrections, to be used with the IGS (International GNSS Service) ultra rapid orbits. The RECTILE data is made available to EUMETSAT.
Basic processing of all MetOP data is performed at CGS of EUMETSAT in Darmstadt, Germany. This is where level 1 products for all MetOp instruments are processed. The GRAS level 1b products are disseminated directly to the users and to the GRAS SAF (Meteorology Satellite Applications Facility) hosted by DMI (Danish Meteorological Institute) in Copenhagen, Denmark.
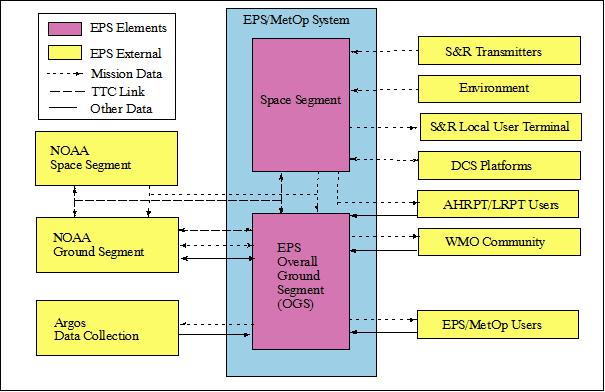
EPS products will be made available to all users via the UMARF facility that is integrated with the EUMETSAT User Services.
Spacecraft | Orbit | Launch or projected launch |
NOAA-15 (K prior to launch) | AM orbit (7:30) | May 13, 1998 |
NOAA-16 (L prior to launch) | PM orbit | Sept. 21, 2000 |
NOAA-17 (M prior to launch) | AM orbit (10:00 change!!) | June 24, 2002 with Titan-2 vehicle |
NOAA-18 (N prior to launch) | PM orbit | May 20, 2005 with Delta-2 vehicle |
MetOp-A | AM orbit | October 19, 2006 with Soyuz vehicle |
NOAA-19 (N' prior to launch) | PM orbit | February 06, 2009 with Delta-2 vehicle |
MetOp-B | AM orbit | Sept.17, 2012 with Soyuz 2.1A/Fregat vehicle 21) |
MetOp-C | AM orbit | Planned for 2018 with Soyuz vehicle |
GSN (GRAS Ground Support Network)
GSN is an operational system designed and operated by ESA/ESOC to deliver supporting data to the MetOp CGS (Core Ground Segment) in order to process atmospheric sounding data delivered by the MetOp GRAS instrument and for MetOp precise orbit determination. The system is subjected to very stringent requirements in availability (99% asymptotic availability), reliability (6 hours maximal interruption, less than 3 interruptions of service per 30 days period) and accuracy (1 m for position and 1 ns for clock bias, both 2σ).
The support data consists of (Ref. 114): 118)
• GPS orbit predictions and clock bias estimation. GPS orbits are updated every 3 hours, while GPS clock bias are estimated every 15 minutes and have timeliness smaller than 60 minutes (it will be updated to 45 minutes in the near future).
• Ground tracking data of all GPS occulting spacecrafts by GPS receivers globally distributed (to allow differential processing of occultations).
• Auxiliary files (i.e. Earth Orientation Parameters).
The GSN receiver station network consists of a set of approximately 40 redundant stations (25 primary and 15 back-up, which are geographically distributed (Figure 61). RINEX files of 15 minutes at 1Hz frequency are continuously provided by at least 25 stations with a latency of less than 5 minutes.
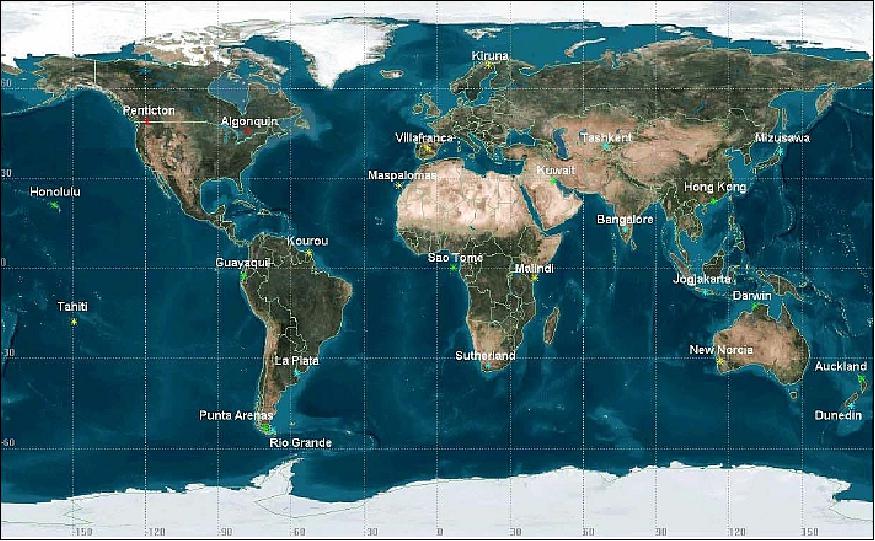
Since July 20, 2010, the GSN system is based on ESOC's NAPEOS (Navigation Package for Earth Observation Software). ESOC is one of the leading Analysis Centers of IGS (International GNSS Service). This has resulted in an increased accuracy of their GPS products.
ADA (Antarctic Data Acquisition) Project
The original EPS ground segment for MetOp missions was designed to achieve a worst case end-to-end timeliness for MetOp global products (L1) of 135 minutes. The design was based on a pipeline processing scheme where GDS (Global Data Set) data is acquired from one single ground station at Svalbard polar site. The data acquisition is performed in one single dump per orbit. The data acquisition, processing and dissemination are performed in a sequential order. 119)
A data acquisition service at the Antarctic was considered by EUMETSAT and its US partners, to improve products timeliness towards the end users. The McMurdo site was selected, and a partnership agreement between EUMETSAT and NOAA was prepared to use the McMurdo site for acquisition and delivery of MetOp GDS data to EUMETSAT HQ in Darmstadt.
ADA (Antarctica Data Acquisition) is an international partnership of EUMETSAT, NOAA, NASA and NSF (National Science Foundation) with the objective to provide a capability for EUMETSAT's MetOp series of polar-orbiting environmental satellites. These four organizations efficiently implemented a new capability connecting McMurdo Station, Antarctica to EUMETSAT's Darmstadt, Germany Control Centre for the purpose of improving (decreasing) the latency of MetOp satellite data by 50%, from 130 minutes to 65 minutes. The improved latency provides both European and US weather services more frequent environmental observations for near-real-time mesoscale and mid/long-range global weather forecasts. The ADA capability was achieved by integrating organizationally independent components to form a working system for high-latitude southern hemisphere data acquisition and delivery. 120)
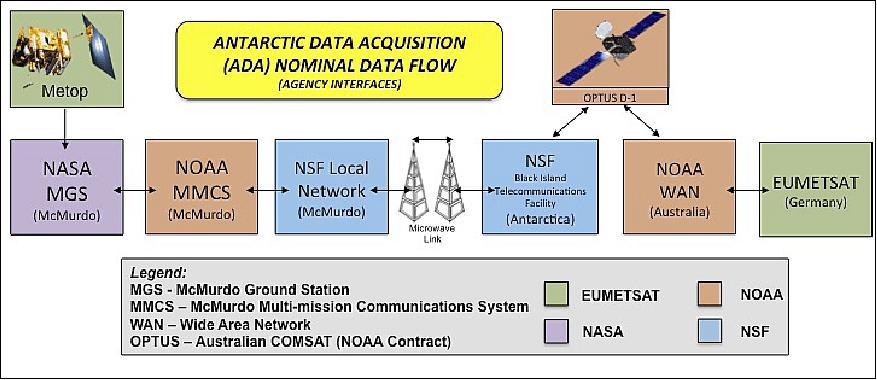
Legend to Figure 62: Illustration of the multi-agency data flow from the MetOp satellite, to the NASA antenna, through the NSF local communications network and the NOAA MMCS (McMurdo Multimission Communications System) and on to the EUMETSAT Control Centre in Darmstadt, Germany.
Following a series of successful trials, EUMETSAT declared ADA operational for MetOp on schedule in June 2011 and MetOp -A became the first polar-orbiting environmental satellite to achieve the 65-minute data latency operationally (Ref. 47).
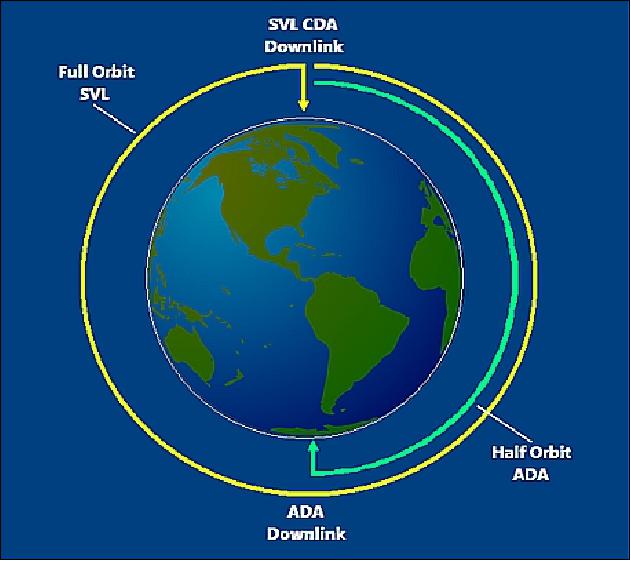
Figure 64 depicts the flow of MetOp data to EUMETSAT before the ADA and after the addition of the ADA. In addition to the nominal full orbit dumps of data over the northern polar station in Svalbard, the MetOp satellite now dumps additional half orbits of data over the MGS (McMurdo Ground Station) in McMurdo, Antarctica. The data dumped over McMurdo is transmitted back to Darmstadt for real-time processing, and is transferred in parallel to NOAA in Suitland via the existing communications infrastructure. Receiving the half orbits of data from McMurdo avoids having to wait an extra 50 minutes to receive the same data from Svalbard, and is the key in halving the MetOp data latency from 130 minutes to 65.
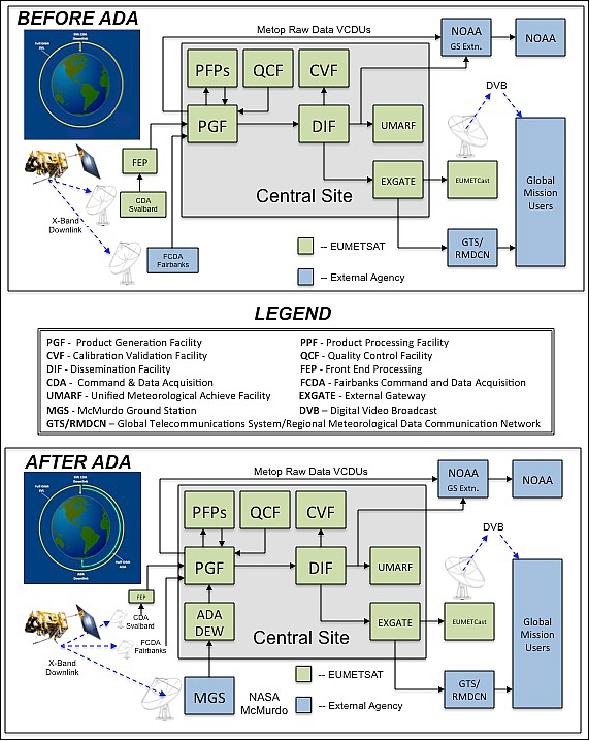
Figure 64: Before ADA and after ADA diagram of MetOp data flow (ADA partnership)
Background on the ADA (Antarctic Data Acquisition) development history (Ref. 120)
In the early part of the 21st Century, NOAA was pursuing a new polar-orbiting satellite constellation in cooperation with the US Department of Defense and NASA. The US system, designated the NPOESS (National Polar-orbiting Operational Environmental Satellite System), was designed to fly in each of the early-morning, mid-morning, and afternoon orbits. The NPOESS Program encountered numerous developmental challenges and as a result, in 2006 the US Government decided to not deploy a satellite into the mid-morning orbit. This decision was made primarily because EUMETSAT was already providing data for the US from that orbital location via MetOp-A under the IJPS (Initial Joint Polar System) partnership. The expectation was that data from MetOp-B and MetOp-C would continue to meet the US needs for the next 10-15 years.
However, a nuance to the decision resulted in the retention of the US requirement for low data latency. To meet this latency requirement, NOAA looked to EUMETSAT to fulfill the data requirement and re-examine methods to achieve the latency requirement for the data. At the same time, EUMETSAT was investigating methods to improve the data latency of MetOp and to address a technical issue with the direct broadcast downlink on MetOp-A. After a series of meetings in mid-2006 and early 2007, NOAA and EUMETSAT agreed the most economical means to meet the both organization's goals for improved data latency from the mid-morning orbit was to expand NOAA's planned use of McMurdo Station, Antarctica. NOAA agreed to provide a satellite ground station capability and a Multi-Mission Communications System for acquiring MetOp Global Data Sets (GDS) and transporting them to EUMETSAT's MetOp Control Center. EUMETSAT agreed to modify the MetOp system to downlink their GDS to the NOAA-provided resources at McMurdo Station and to combine processing of the McMurdo GDS stream with their existing GDS stream from Svalbard, Norway.
Through a series of incremental steps, NOAA and EUMETSAT expanded their partnership by first agreeing to begin work on ADA via an exchange of letters in 2007. The final terms were agreed to in 2009, and the formal agreement, known as the Supplement to the Program Implementation Plan (PIP) for the Cooperation between the NOAA and EUMETSAT on MetOp Data Downlink at McMurdo Station, Antarctica was signed in 2011.
The McMurdo station, located at Hut Point Peninsula on Ross Island in McMurdo Sound (77° 55' S Latitude, 166° 39' E Longitude) , is the southern-most, largest, and most logistically capable of the national Antarctic operators collaborating in the Antarctic Treaty system that is within reach of conventional geosynchronous communications satellites. This is an ideal combination to maximize the objectives of low-latency data return held by NOAA and EUMETSAT. However, the commercial satellite industry does not consider Antarctica a market, and thus does not provide the kind of enhanced service offerings that would be needed to support the required data flow from McMurdo.
While NOAA was developing its data sharing relationship with EUMETSAT, NOAA was also collaborating with NSF for the implementation of two NPOESS receptor Earth stations at McMurdo as an important component of the global NPOESS command/control/communications network. NSF is the executive agent for all US activities on the Antarctic continent, and in this role manages the United States' Antarctic Program (USAP), a critical function the NSF has carried out since 1970. In its role as executive agent, the NSF provides logistics support, along with all infrastructure services to operate and maintain McMurdo Station. Additionally, the NSF is a key stakeholder in the NOAA-led partnership for communications services that link Antarctica to the other continents. The NSF in return provides local (on-ice) networking and microwave communications services from "downtown McMurdo" on Ross Island to the satellite uplink station the NSF operates on near-by Black Island to obtain unobstructed viewing of critical communications satellite orbit slots in the Asia-Pacific region.
Fortunately, NOAA had partnered with both NASA and the NSF prior to ADA, and the three agencies were able to build upon previous successful collaborative efforts to enable NOAA to meet its commitment to EUMETSAT.
NSF informed NOAA of a close working relationship that NSF had cultivated with the Australian satellite communications operator, Optus, while exploring the potential to re-purpose a legacy inclined-orbit Optus satellite for Antarctic communications (to the NSF Amundsen-Scott South Pole Station, located at 90°S). Optus had, at the time, a replenishment satellite for its operational fleet under construction by Orbital Sciences. NSF brokered an introduction between Optus and NOAA to explore the potential of modifying the new satellite's service plan/antenna beam pattern to incorporate service to McMurdo. A successful match was made, resulting in the reconfiguration of the Optus D1 satellite (and its later on-orbit backup, Optus D2) to project high-gain Ku-Band service to McMurdo. This provided the missing link needed to capitalize on McMurdo's unique southern high latitude.
Although NOAA operates and maintains several CDAS (Command and Data Acquisition Stations) in the United States and at Svalbard, Norway, NOAA did not operate or maintain a CDAS at McMurdo Station at the time NOAA signed the Supplemental PIP to add ADA. In order for NOAA to provide data acquisition and data transport services per the new Supplement PIP, NOAA needed to secure the assistance from two additional US Agencies with existing assets at McMurdo Station – NASA and the NSF.
Since the long lead times needed to deploy the necessary infrastructure at a remote location such as McMurdo precluded NOAA from independently procuring and installing a new X-band antenna system to support MetOp, NOAA asked its long-time partner, NASA, to secure use of the 10 m MGS (McMurdo Ground Station) to support MetOp X-band data acquisition. In early 2008, NOAA and NASA began negotiations on an agreement for NASA to provide NOAA the ground station services necessary to meet NOAA's commitment to the ADA partnership. This agreement identified the major activities that NASA would undertake to meet a commitment to support the MetOp series through the launch of MetOp-C. The long-term agreement was executed in 2011.
Early in 2008, NOAA reached out to its partner NSF for additional assistance. For NOAA and EUMETSAT to achieve ADA, NSF participation was essential. In order for NASA to complete the required modifications to the MGS, NASA was dependent on NSF support for cargo prioritization and on-ice civil works, including construction site preparation and heavy equipment operations.
The ADA capability was achieved by integrating organizationally independent components and leveraging existing capabilities both on- and off-ice in an unprecedented display of international cooperation.
In the end, through leveraging existing partnerships, NOAA was able to meet its requirements to utilize MetOp data in the mid-morning orbit and to reduce the latency to acquire the data. Each of the other partners also directly benefited from the ADA cooperation. EUMETSAT was able to cut delivery of its MetOp data in half; NASA was able to upgrade its MGS and have a guaranteed long-term user of MGS; and NSF was able to increase the forecast accuracy of the South Pole as well as increase the volume of data able to go in and out of McMurdo. This significant new operational capability now provides MetOp meteorological and environmental data to US and European weather services approximately twice as fast as they receive it at present by reducing the amount of time that meteorological sensor data stored on the satellite's on-board recorders must wait before being downlinked to the ground for processing.
Agency | Unique Benefits | Common Benefits |
EUMETSAT | • Strengthened IJPS partnership- with NOAA • Minimal changes to MetOp system | • Low cost solution for improving MetOp data latency from 130 mins to 65 mins on average • Access to NOAA's MMCS (McMurdo Multi-mission Communications System) |
NOAA | • Strengthened IJPS partnership- with EUMETSAT • Meets commitment via strategic partnerships with NSF and NASA • Gained cost-sharing partner for MMCS | • Low cost solution for improving MetOp data latency from 130 to 65 minutes on average |
NSF | • International recognition for McMurdo Station's role for high latitude space data acquisition as a conjugate to Svalbard in the Northern Hemisphere • Leveraging the NSF mission in Antarctica with NOAA and NASA missions to provide greater return on the U.S. national investment • Low overhead/simplified management for NSF (only 1 bilateral agreement needed – NSF-NASA for MGS hosting and logistical support • Infrastructure upgrades at McMurdo (MGS road access, local area network improvements, etc.) | • Improved forecasting and weather predictions for flight and search/rescue operations in Antarctica as a result of improved latency and local access to data • Affordable communications enhancements for NSF's science program via access to the MMCS (McMurdo Multi-mission Communications System) |
NASA | • Gained long-term customer for MGS • Refurbished aging antenna system and upgraded ground station electronics for MGS with remote operability and increased capability to support future NASA missions • Cost-sharing partner for MGS, upgrades, operations and maintenance • Infrastructure upgrades at McMurdo (MGS road access, local area network improvements, etc.) | • Affordable communications enhancements for NASA's space data ground network via access to the MMCS |
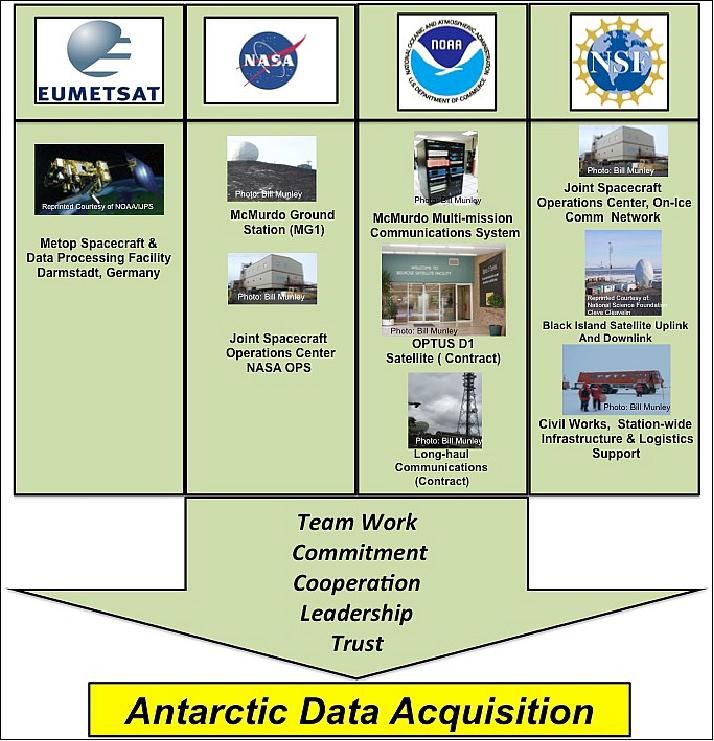
References
1) C. Cohen, P. G. Edwards, "EPS, the European contribution to the NOAA/EUMETSAT Initial Joint Polar system (IJPS)," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-B.1.02
2) P. G. Edwards, D. Pawlak, "MetOp: The Space Segment for EUMETSAT's Polar System," ESA Bulletin, No 102, May 2000, pp. 7-18, URL: http://www.esa.int/esapub/bulletin/bullet102/Edwards102.pdf
3) P. G. Edwards, B. Berruti, P. Blythe, J. Callies, S. Carlier, C. Fransen, R. Krutsch, A.-R. Lefebvre, M. Loiselet, N. Stricker, "The MetOp Satellite - Weather Information from Polar Orbit," ESA Bulletin, No 127, Aug. 2006, pp. 8-17, URL: http://www.esa.int/esapub/bulletin/bulletin127/bul127b_edwards.pdf
4) M. Cohen, G. Mason, Y. Buhler, D. Provost, D. Klaes, X. Calbet, "The EUMETSAT Polar System - A Major Step for Operational Meteorology," ESA Bulletin, No 127, Aug. 2006, pp. 18-23, URL: http://www.esa.int/esapub/bulletin/bulletin127/bul127c_cohen.pdf
5) François Spoto, Yves Bordes, Simon Chalkley, Luis Huertas, Omar Sy, Yves Buhler , Jean-Michel Caujolle, "Preparing MetOp for Work - Launch, Early Operations and Commissioning ," ESA Bulletin, No 127, Aug. 2006, pp. 24-30, URL: http://www.esa.int/esapub/bulletin/bulletin127/bul127d_spoto.pdf
6) http://www.esa.int/esaLP/SEMEMDG23IE_LPmetop_0.html
7) MetOp - Monitoring the Weather from Polar Orbit," ESA brochure BR-261, May 2006, URL: http://esamultimedia.esa.int/docs/BR-261_MetOp.pdf
8) Yoke T. Yoon, Pier Luigi Righetti, "Precise Calibration of Multi-Segment Maneuvers for EUMETSAT Polar System Operations Planning," Proceedings of the 25th International Symposium on Space Flight Dynamics, Munich, Germany, Oct. 19-23, 2015, URL: http://www.seaspace.com/docs/metop_customers.pdf
9) D. Pawlak, C. Bousquet, "MetOp: the space segment of the EUMETSAT Polar System," Proceedings of the 2000 EUMETSAT Satellite Data Users' Conference, Bologna, Italy, May 29-June 2, 2000, pp. 209-213
10) "MetOp Second Generation arrives at ESTEC," ESA, Our week through the lens: 3 - 7 June 2019, URL: http://www.esa.int/Highlights/Week_In_Images_3_7_June_2019
11) "ESA ready for weather mission liftoff," ESA, November 2018, URL: http://m.esa.int/Our_Activities/Operations/ESA
_ready_for_weather_mission_liftoff
12) "Checking connections on MetOp-C," ESA, 4 October 2018, URL: http://m.esa.int/spaceinimages/Images/2018/10
/Checking_connections_on_MetOp-C
13)) "MetOp-C launch campaign kicks off," ESA, 9 July 2018, URL: http://m.esa.int/Our_Activities/Observing_the
_Earth/MetOp/MetOp-C_launch_campaign_kicks_off
14) "Airbus-built MetOp-C weather satellite gets ready for launch," Airbus, 17 April 2018, URL: https://www.geospatialworld.net/news/airbus-built
-metop-c-weather-satellite-gets-ready-for-launch/
15) "Metop-C, the last of the first generation of European meteorological polar-orbiting satellites, is undergoing final testing before being readied for launch in September," EUMETSAT, 17 April 2018, URL: [web source no longer available]
16) "Airbus completes MetOp-C platform/payload coupling," Airbus DS, Aug. 10, 2017, URL: https://navigator.gmx.net/mail?sid=e36562e0a04
152b821886163072196fffcd622d256d3493acf9e6150f25
60c92e04629b113f7a3c6df2304d41b11c06b
17) "MetOp-C lowered into LSS," ESA, Feb. 22, 2017, URL: http://m.esa.int/spaceinimages/Images/2017
/02/MetOp-C_lowered_into_LSS
18) "MetOp-C payload module," ESA, Jan. 11, 2017, URL: http://m.esa.int/spaceinimages/Images/2016/01/MetOp-C_payload_module
19) Jean-Paul Gardelle, Luciano di Napoli, Marc Cohen, "MetOp-B in-orbit Commissioning," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.1.5
20) "MetOp-A launch," ESA, Oct. 19, 2006, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/
a_style_color_000_href_http_www.esa.int_ESApod
_SEMGI9BUQPE_0.html_MetOp-A_launch_a
21) "Europe's second polar-orbiting weather satellite is aloft," ESA, Sept. 17, 2012, URL: http://www.esa.int/esaCP/SEMNB8DY37H_index_0.html
22) "Europe's third polar-orbiting weather satellite lofted into orbit," ESA, 7 November 2018, URL: http://m.esa.int/Our_Activities/Observing_the_Earth/MetOp/Europe_s
_third_polar-orbiting_weather_satellite_lofted_into_orbit
23)) "Satellite: Metop-C," WMO OSCAR, 2018, URL: https://www.wmo-sat.info/oscar/satellites/view/308
24) "A critical element of polar-orbiting meteorological satellite Metop-C's payload – the Infrared Atmospheric Sounding Interferometer (IASI) – delivered its first spectrum today," EUMETSAT 13 December 2018, URL: [web source no longer available]
25) "Pollution: New ammonia emission sources detected from space," CNRS Press Release, 5 December 2018, URL: http://www2.cnrs.fr/en/3183.htm
26) Martin Van Damme, Lieven Clarisse, Simon Whit burn, Juliette Hadji-Lazaro, Daniel Hurtmans, Cathy Clerbaux & Pierre-François Coheur , "Industrial and agricultural ammonia point sources exposed," Nature Letter, Vol. 564, pp:99-103, Published: 05 December 2018, DOI: 10.1038/s41586-018-0747-1
27) "Argos-3 instrument successfully activated on EUMETSAT's Metop-C satellite," KINEIS, 16 November 2018, URL: https://www.argos-system.org/argos-3-activated-metop-c/
28) "Kinéis, a unique constellation," CLS Group, 9October 2018, URL: https://www.cls.fr/en/kineis-unique-constellation/
29) "Handing over MetOp-C," ESA, 11 November 2018, URL: http://m.esa.int/Our_Activities/Operations/Handing_over_MetOp-C
30) "Topside Total Electron Content is now available from GNSS observations collected onboard Metop-A and Metop-B," EUMETSAT, 6 September 2018, URL: [web source no longer available]
31) "EUMETSAT extends MetOp-A lifetime, approves contract, and signs agreements for extracting new environmental products from observations of next generation satellites," EUMETSAT, Dec. 8, 2016, URL: http://www.eumetsat.int/website/home/News/DAT_3304789.html
32) "Airbus weather satellite MetOp-A notches up 10 years," Airbus DS News, Oct. 17, 2016, URL: http://tinyurl.com/zuxn8ss
33) "Fifty Thousand Orbits For EUMETSAT's Metop-A Satellite," SatNews Daily, June 13, 2016, URL: http://www.satnews.com/story.php?number=652291399
34) http://www.eumetsat.int/website/home/Satellites/CurrentSatellites/index.html , EUMETSAT website, accessed on May 12, 2016
35) "GOME-2 newsletter #37 May 2015–April 2016," EUMETSAT, URL: http://www.eumetsat.int/website/home/TechnicalBulletins/GOME2/index.html
36) J. Schmetz, K. Holmlund, P. Schlüssel, R. Stuhlmann, J. Schulz, L. Schüller, M. Cohen, S. Rota, "EUMETSAT's Current and Future Satellite Programs," The 1st KMA International Meteorological Satellite Conference, Seoul, Korea, November 16-18, 2015, URL: http://www.kmaimsc.kr/download/Day-1.zip
37) "Ten years ago, on 20 May 2005, the first Microwave Humidity Sounder (MHS) instrument was launched into orbit on board the NOAA-18 satellite," EUMETSAT, May 20, 2015, URL: http://www.eumetsat.int/website/home/News/DAT_2645091.html
38) "Super Typhoon Neoguri, the strongest typhoon in the 2014 Western Pacific season, seen by Metop-B," EUMETSAT, July 7, 2014, URL: http://www.eumetsat.int/website/home/Images/ImageLibrary/DAT_2263276.html
39) "Metop-B takes over prime operational service," EUMETSAT, April 24, 2013, URL: http://www.eumetsat.int/Home/Main/News/Press_Releases/832312?l=en
40) "MetOp dual operations: benefits and products," EUMETSAT, June.4, 2014: URL: http://www.eumetsat.int/website/home/InSight/NewsUpdates/DAT_2163221.html
41) "Is the ozone layer on the road to recovery?" ESA, Feb. 8, 2013, URL: http://www.esa.int/Our_Activities/Observing_the_Earth/Is_
the_ozone_layer_on_the_road_to_recovery
42) "The IASI instrument on MetOp-B produces first data," EUMETSAT Press Release, Oct. 30, 2012, URL: http://www.eumetsat.int/Home/Main/News/Press_Releases/824309?l=en
43) "Metop-B delivers first data from polar orbit," ESA, Sept. 28, 2012, URL: http://www.esa.int/esaCP/SEMUL2ERI7H_index_0.html
44) "ESA hands over control of the MetOp-B weather satellite to EUMETSAT," EUMETSAT Press Releases, Sept. 21, 2012, URL: http://www.eumetsat.int/home/main/news/press_releases/822756?l=en
45) Tim Hewison, Marianne Koenig, Sebastien Wagner, Rob Roebeling, Peter Miu, Jörg Schulz, Harald Rothfuss, "EUMETSAT GPRC Report," May 30, 2012, URL: https://web.archive.org/web/20190728134219/http://www.wmo.int:80/pages/prog/sat/meetings/documents/GSICS-EP-12_Doc_02-04_EUMETSAT-GPRC-Report.pdf
46) "Fifth anniversary of Metop-A in orbit," EUMETSAT, October 19, 2011, URL: http://www.eumetsat.int/Home/Main/News/Press_Releases/812077?l=en
47) "Faster MetOp-A Data Delivery from 10 June, 2011," EUMETSAT, June 9, 2011, URL: http://www.eumetsat.int/Home/Main/News/Features/807695
48) "MetOp-A," ESA Bulletin No 146, May 2011, p. 97
49) "MetOp status," ESA Bulletin, No 145, February 2011, p. 84
50) "MetOp-A monitors marine life," Jan. 13, 2011, URL: http://www.eumetsat.int/Home/Main/News/Features/803327?l=en
51) Weather Satellite Status Report, Jan. 2011, URL: http://homepage.ntlworld.com/phqfh1/status.htm
52) "Extended Geographical Coverage for Metop-A Direct Readout Service," EUMETSAT, Jan. 13, 2011, URL: http://www.eumetsat.int/Home/Main/News/ProductServiceNews/803275?l=en
53) ESA Bulletin Nr. 141, Feb. 2010, p. 72
54) "Metop-A Completes 20,000th Orbit," Science Daily, Aug. 27, 2010, URL: http://www.sciencedaily.com/releases/2010/08/100827082330.htm
55) Laurence Buffet, Carole Larigauderie, Dominique Montero, Flavio Murolo, Stephan Anstötz, Patrick Astruc, Odile Andreis, Alain Pacifico, "MetOp/IASI revisited operations concept : several ways to minimize mission down time w.r.t. SEUs," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2191
56) Hans Bonekamp, Craig Anderson, Julia Figa, Julian Wilson, "ASCAT Mission Overview," EUMETSAT/ESA Scatterometer Science Conference, Darmstadt, Germany, April 11-13, 2011
57) J.-P. Gardelle, "MetOp-A in-orbit commissioning," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.I.18
58) Janet C. Green, Andrew Monham, Allan Tylka, Conrad Jackson, Gretchen Lindsey, "Defining radiation ‘safe' zones for operating the High Rate Picture Transmission (HRPT) instrument onboard the METOP satellite," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2136
59) Lionel de la Taille, Andrew Monham, Anders Soerensen, Jose M de Juana, Antimo Damiano, "Risk vs Return: Mitigating an on-board radiation failure susceptibility," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-1930
60) "Successful completion of Metop-A Satellite In-Orbit Verification (SIOV) phase," March 30, 2007, URL: https://web.archive.org/web/20081204161538/http://www.eumetsat.int/Home/Main/Media/News/029625?l=en
61) http://www.esa.int/esaLP/SEMV4DG23IE_LPmetop_0.html
62) J. Figa-Saldaña, J. J. W. Wilson, E. Attema, R. Gelsthorpe, M. R. Drinkwater, A. Stoffelen, "The advanced scatterometer (ASCAT) on the meteorological operational (MetOp) platform: A follow on for European wind scatterometers," Canadian Journal of Remote Sensing, Vol. 28, No. 3, pp. 404-412, June 2002
63) R. V. Gelsthorpe, E. Schied, J. J. W. Wilson, "ASCAT - MetOp's Advanced Scatterometer," ESA Bulletin, No 102, May 2000, pp. 19-27, URL: http://www.esa.int/esapub/bulletin/bullet102/Gelsthorpe102.pdf
64) "ASCAT Advanced Scatterometer," ESA brochure
65) F. Rostan, M. Kuntz, S. Schütz, "The Advanced Scatterometer (ASCAT) Ground Processing Prototype," Proceedings of IGARSS'99, Vol. I, Hamburg, June 28 - July 2, 1999, pp. 224-226
66) H. Ebner, H. R. Schulte, H. Hölzl, D. Miller, P. Hans, "ASCAT - Advanced Wind Scatterometer," IGARSS`92, Volume I, pp. 435-439
67) Abelardo Pérez Albiñana, Julian Wilson, Gokhan Kayal, Graeme Mason, "The Payload for the Polar Orbiting Operational Meteorological Satellite Metop," SPIE Conference Optics & Photonics 2005, Vol. 5883, San Diego, CA, July 31 - Aug. 4, 2005
68) F. Rostan, M. Kuntz, S. Schütz, "The Advanced Scatterometer (ASCAT) Ground Processing Prototype," IGARSS'99 Proceedings, Hamburg, June 28-July 2, 1999, Vol. 1, pp. 224-226
69) A. Stoffelen, "Error Modeling and Calibration; towards the true surface wind speed," Journal of Geophysical Research, Vol. 103, 1998, pp. 7755-7766
70) F. Rostan, "The Calibration of the MetOp/Advanced Scatterometer (ASCAT)," IEEE/IGARSS 2000, Honolulu, HI, July 24-28, 2000
71) C. J. Bushell, et al., "Humidity Sounders for the 21st Century," Proceedings of the EUMETSAT Meteorological Satellite User's Conference, Copenhagen, Denmark, Sept. 6-10, 1999, pp.77-84
72) G. Shaw, C. J. Bushell, "The Radiometric Performance of the Microwave Humidity Sounder," Proceedings of the EUMETSAT Meteorological Satellite User's Conference, Copenhagen, Denmark, Sept. 6-10, 1999, pp.135-139
73) http://www.eumetsat.int/idcplg?IdcService=GET_
FILE&dDocName=pdf_tm_mhs_instrument&Revisio
nSelectionMethod=LatestReleased
74) "IASI - an infrared sounder for operational meteorology," CNES Magazine, No 19, May 2003, p. 10
75) Ph. Hébert, D. Blumstein, C. Buil, T. Carlier, G. Chalon, P. Astruc, A. Clauss, D. Siméoni,B. Tournier, "IASI Instrument: Technical Description and Measured Performances," Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France, ESA SP-554
76) T. Carlier, B. Millet, D. Blumstein, G. Ponce, F. Bernard, G. Chalon, "In-orbit characterization of the infrared atmospheric sounding interferometer (IASI) on MetOp-A," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.3.03
77) Laurence Buffet, Eric Pequinot, Denis Blumstein, Roger Fjortoft, Vincent Lonjou, Bruno Millet, Carole Larigauderie, "IASI Instrument Onboard MetOp-A: Lessons Learned after almost two Years in Orbit," Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
78) D. Simeoni, C. Singer, G. Chalon, "Infrared Atmospheric Sounding Interferometer," IAF-96-B3.P212, Acta Astronautica, Vol. 40, No. 2-8, pp. 113-118, 1997
79) "Improved Atmospheric Sounding Infrared," ASI/CNES brochure, April 1991
80) http://smsc.cnes.fr/IASI/GP_instrument.htm
81) Th. Phulpin, et al., "IASI on METOP: project status of the instruments and system," 12th ASSFTS (Atmospheric Science from Space using Fourier Transform Spectrometry) Workshop, May 18-20, 2005, Quebec City, Canada, URL: https://web.archive.org/web/20120824020735/http://bernath.uwaterloo.ca:80/ASSFTS/Media/ASSFTS%20Presentations/pdfPres/Phulpin.pdf
82) http://www.esa.int/esaLP/SEMNQEG23IE_LPmetop_0.html
83) http://www.esa.int/esaLP/ESA024VTYWC_LPmetop_0.html
84) Gilles Chalon, Francois Cayla, Dorothée Diebel, "IASI : An Advance Sounder for Operational Meteorology," URL: http://smsc.cnes.fr/documentation/IASI/Publications
/PRESENTATION_IAF_2001.pdf
85) M.-C. Arnolfo, "Uncooled Microbolometer Camera for Spaceborne IR Observation - Qualification Results," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-B.3.07
86) Vincent Lonjou, Laurence Buffet, Jordi Chinaud, Carole Larigauderie, Frédérique Meunier, Eric Péquignot, "The IASI technical expertise center : IASI tuning and performance monitoring," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2310
87) Fiona Hilton, Raymond Armante, Thomas August, Chris Barnet, Aurelie Bouchard, Claude Camy-Peyret, Virginie Capelle, Lieven Clarisse, Cathy Clerbaux, Pierre-Francois Coheur, Andrew Collard, Cyril Crevoisier, Gaelle Dufour, David Edwards, Francois Faijan, Nadia Fourrié, Antoni a Gambacorta, Mitch ell Goldberg, Vincent Guidard, Daniel Hurtmans, Samuel Illingworth, Nicole Jacquinet-Husson, Tobi as Kerzenmacher, Dieter Klaes, Lydie Lavanant, Guido Masiello, Marc o Matricardi, Anthony McNally, Stuart Newman, Edward Pavelin, Sebastien Payan, Eric Péquignot, Sophi e Peyridieu, Thierry Phulpin, John Remedios, Peter Schlüssel, Carmine Serio, Larrabee Strow, Claudia Stubenrauch , Jonathan Taylor, David Tobin, Walter Wolf, Daniel Zhou, "Hyperspectral Earth Observation from IASI: Five Years of Accomplishments," BAMS (Bulletin of the American Meteorological Society), Vol. 93, Issue 3, March 2012, pp. 347-370, URL: http://journals.ametsoc.org/doi/pdf/10.1175/BAMS-D-11-00027.1; the paper is also available at URL: http://smsc.cnes.fr/documentation/IASI/Public
ations/BAMS-D-11-00027.pdf
88) J. Callies, E. Corpaccioli, M. Eisinger, A. Hahne, A. Lefebvre, "GOME-2 - MetOp's Second-Generation Sensor for Operational Ozone Monitoring," ESA Bulletin, No 102, May 2000, pp. 28-36, URL: http://www.esa.int/esapub/bulletin/bullet102/Callies102.pdf
89) J. Callies, E. Corpaccioli, M. Eisinger, A. Lefebvre, R. Munro, A. Perez-Albinana, "The New Advanced Polarization Measurements of GOME-2 on-board the MetOp satellites," Proceedings of SPIE, Vol 4814, SPIE Annual Meeting 2002: Remote Sensing and Space Technology, July 7-11, 2002, Seattle, WA
90) http://www.esa.int/esaLP/SEMTTEG23IE_LPmetop_0.html
91) W. G. Melbourne, et al., "The application of spaceborne GPS to limb sounding and global monitoring," JPL publication 94-18, 1994
92) J.-P. Luntama, "EPS GRAS mission for operational GPS Meteorology," ION GPS 2001, Sept. 11-14, 2001, Salt Lake City, UT
93) M. Loiselet, N. Stricker, Y. Menard, J.-P. Luntama, "GRAS - MetOp's GPS-based Atmospheric Sounder," ESA Bulletin, No 102, May 2000, pp. 38-44, URL: http://www.esa.int/esapub/bulletin/bullet102/Loiselet102.pdf
94) M. Loiselet, N. Stricker, Y. Menard, J.-P. Luntama, "GNSS Radio Occultation Receiver for Atmospheric Sounding," Proceedings of the 2000 EUMETSAT Meteorological Satellite Data Users' Conference, Bologna, Italy, May 29, June 2, 2000, pp. 192-200
95) G. Bergeton Larsen, "Atmospheric Products from the GRAS Meteorology SAF (Satellite Application Facility)," Proceedings of the 2000 EUMETSAT Meteorological Satellite Data Users' Conference, Bologna, Italy, May 29, June 2, 2000, pp. 243-249
96) W. Zsalcsik, F. Zangerl, W. Brunda, "Radio Occultation GPS Receiver Validation and Verification," NAVITEC 2001, 1st ESA Workshop on Satellite Navigation User Equipment Technologies, Dec. 10-12, 2001, ESA/ESTEC
97) http://www.grassaf.org/GRAS_instrument.php
98) http://www.esa.int/esaLP/
ESAA78VTYWC_LPmetop_1.html#subhead1
99) M Bonnedal, A Berg, J Christensen, "MetOp GRAS Open Loop Tracking Performance," Proceedings of NAVITEC 2008, 4th ESA Workshop on Satellite Navigation User Equipment Technologies GNSS User Technologies in the Sensor Fusion Era, Dec. 10-12, 2008, Noordwijk, The Netherlands
100) M. Loiselet, N. Stricker , Y. Menard, J.-P. Luntama, "GRAS – Metop's GPS-Based Atmospheric Sounder," ESA Bulletin, No 102, May 2000, pp.38-44, URL: http://esamultimedia.esa.int/docs/metop/Loiselet_102.pdf
101) M. Hassel, "Dual Frequency Patch Antenna for GPS Occultation Measurements," Proceedings of the 25th ESA Antenna Workshop on Satellite Antenna Technology, ESTEC, Noordwijk, The Netherlands, Sept. 18-20, 2002, pp. 537-542
102) Marc Loiselet, Nico Stricker, Jacob Christensen, Carmelo Carrascosa, "In-orbit verification results from GRAS receiver on MetOp-A satellite," 2007, URL: http://www.eumetsat.int/Home/Main/Publications/
Conference_and_Workshop_Proceedings/groups/cps
/documents/document/pdf_conf_p50_s1_09_loiselet_p.pdf
103) P. Sinander, "AGGA-2 Data Sheet, Advanced GPS/GLONASS ASIC for Space Applications," ESTEC, TOSESM/PS/100, Issue 1, Dec. 2, 1999.
104) M. Loiselet, N. Stricker, J. Christensen, C. Carrascosa, "In Orbit Verification Results from GRAS Receiver on MetOp-A Satellite, Proceedings of the Joint 2007 EUMETSAT Meteorological Satellite Conference and the 15th Satellite Meteorology & Oceanography Conference of the American Meteorological Society, Amsterdam, The Netherlands, Sept. 24-28, 2007
105) Magnus Bonnedal, Thomas Lindgren, Anders Carlström, Jacob Christensen, "MetOp GRAS: Signal Tracking Performance Results," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and Europen Workshop on GNSS Signals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
106) K. B. Lauritsen, H. Gleisner, M. E. Gorbunov, F. Rubek, M. B. Sørensen, "The GRAS Project: Radio Occultation Product from MetOp," Proceedings of the Joint 2007 EUMETSAT Meteorological Satellite Conference and the 15th Satellite Meteorology & Oceanography Conference of the American Meteorological Society, Amsterdam, The Netherlands, Sept. 24-28, 2007
107) F. Rubek, G. Bergeton Larsen, J. M. Aparicio, "The GRAS SAF Project - an Operational Radio Occultation System," ION GPS 2001, Sept. 11-14, 2001, Salt Lake City, UT
108) Advanced Data Collection System Instrument Control Document, EUMETSAT, EADS-Astrium, April 2005, URL: http://www.eumetsat.int/idcplg?IdcService=GET_FILE&dDocNa
me=PDF_TEN_EPS-ADCS-ICD&Revisio
nSelectionMethod=LatestReleased
109) "The Argos-3 (or A-DCS) instruments," 40th Argos Operations Committee meeting, CNES, May 24, 2005
110) "Description of the Payloads Used in the COSPAS-SARSAT LEOSAR System;" C/S T.003, Issue 3, Rev. 4, Nov. 2007, COSPAS-SARSAT
111) http://www.esa.int/esaLP/SEMU2DG23IE_LPmetop_1.html#subhead1
112) "New Argos-3 payload to launch on MetOp-C satellite in the night of November 6th – November 7th," Argos, 7 November 2018, URL: http://www.argos-system.org/new-argos-3-payload-metop-c/
113) D. S. Evans, M. S. Greer, "Polar Orbiting Environmental Satellite, Space Environment Monitor-2, Instrument Descriptions and Archive Data Documentation," NOAA Technical Memorandum, Jan. 2004, version 1.4, URL: http://www.ngdc.noaa.gov/stp/NOAA/docs/SEM2v1.4b.pdf
114) Y. Andrés, P.L. Righetti, C. Marquardt, "Near Real-Time Precise Orbit Determination for Radio Occultation and Altimetry Missions," Proceedings of ION GNSS 2010, Portland, OR, USA, Sept. 21-24, 2010
115) "New launch date confirmed for Metop-B," ESA, June 28, 2012, URL: http://www.esa.int/esaCP/SEMCCH1VW3H_index_0.html
116) Jose M de Juana, Dorothee Diebel, Pier Luigi Righetti, Wael El-Dali, "MetOp-B launch and phasing strategy in the presence of MetOp-A," Proceedings of the SpaceOps 2010 Conference, Huntsville, ALA, USA, April 25-30, 2010, paper: AIAA 2010-2021
117) Stephen Clark, "Europe's next MetOp satellite arrives at launch base," Spaceflight Now, March 6, 2012, URL: http://www.spaceflightnow.com/news/n1203/06metopb/
118) R. Zandbergen, the GRAS GSN team (ESOC, EUMETSAT), "Ground Support Network operations for the GRAS Radio Occultation Mission," OPAC (Occultations for Probing Atmosphere and Climate). 2010 International Workshop, Graz, Austria, Sept. 6-11, 2010, URL: http://www.uni-graz.at/opac2010/pdf_presentation/opac_
2010_zandbergen_rene_presentation36.pdf
119) "ADA - EPS OGS Delta Requirements," EUMETSAT, Sept. 22, 2010, URL: ftp://ftp.eumetsat.int/pub/EPS/out/SIVVRR_Docs_to_NOA
A/Docs%20for%20Information/DOCSLIB-%23350378-vV1B_
01PDF-ADA_-_EPS_OGS_Delta_Requirements.pdf
120) James M. Valenti, Andrew Monham, Conor Keegan, William G. Munley, Jr., Patrick D. Smith, Kevin P. McCarthy, "MetOp's Antarctic Data Acquisition Project An International Partnership Success," Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents
/id1275309-Paper-001.pdf
121) https://www.eumetsat.int/plans-metop-end-life
Launch Mission Status Sensor Complement EPS Overview References Back to top