MicroMAS-1 (Micro-sized Microwave Atmospheric Satellite-1)
EO
Mission complete
MIT
Quick facts
Overview
| Mission type | EO |
| Agency | MIT |
| Mission status | Mission complete |
| Launch date | 13 Jul 2014 |
| End of life date | 01 Aug 2015 |
| CEOS EO Handbook | See MicroMAS-1 (Micro-sized Microwave Atmospheric Satellite-1) summary |
MicroMAS-1 (Micro-sized Microwave Atmospheric Satellite-1)
Overview Spacecraft Launch Mission Status Sensor Complement Ground Stations References
MicroMAS is a nanosatellite (3U CubeSat) technology demonstration mission, a joint project of MIT/LL (Massachusetts Institute of Technology/Lincoln Laboratory), MIT/SSL (Space Systems Laboratory) and the University of Massachusetts at Amherst. -The nanosatellite is hosting a passive microwave spectrometer with nine channels operating near the 118.75 GHz oxygen absorption line. Recent work has involved the development and testing of ultra-compact radiometer component technologies that would enable the realization of a high-performance, multi-band sounder that would conform to the 1U CubeSat form factor requirements. 1) 2) 3) 4) 5)
As a low cost platform, MicroMAS offers the potential to deploy multiple satellites than can provide near-continuous views of severe weather. The existing architecture of few, high-cost platforms, infrequently view the same earth area which can miss rapid changes in the strength and direction of evolving storms thus degrading forecast accuracy.
Background: The need for low-cost, mission-flexible, and rapidly deployable spaceborne sensors that meet stringent performance requirements pervades the NASA Earth Science measurement programs, including especially the recommended NRC (National Research Council) Earth Science Decadal Survey missions. The importance of millimeter wave sounding has been highlighted by the Decadal Survey and the subsequent recommendation of a PATH (Precipitation and All-weather Temperature and Humidity) mission. New technologies have enabled a novel approach toward this science observational goal on a nanosatellite. 6) 7) 8)
Spacecraft
MicroMAS is a nanosatellite compatible with the 3U CubeSat specifications. It is designed to autonomously collect microwave radiometry data and transmit the data through an RF link to a ground station for subsequent processing, analysis, and use in weather forecast models.
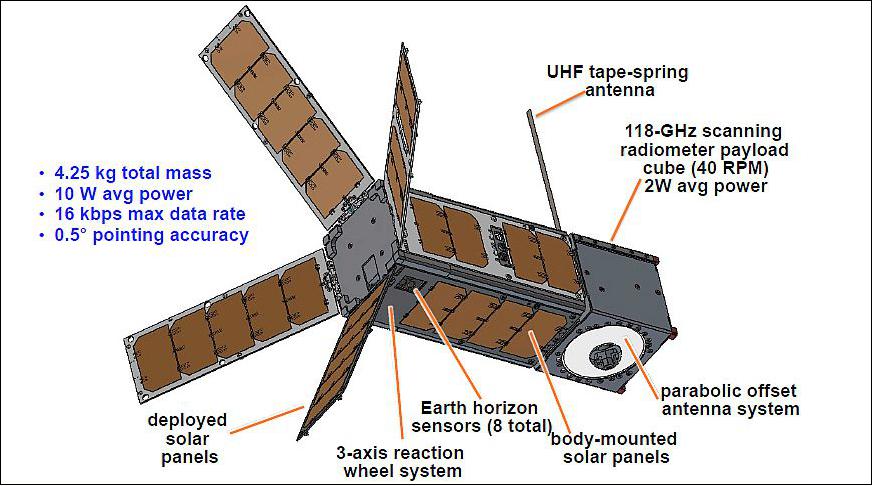
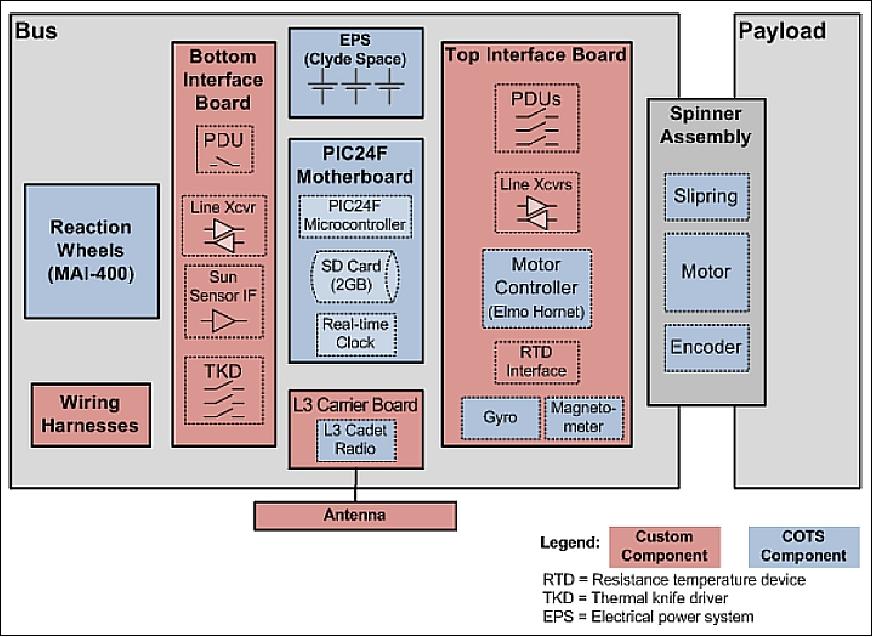
MicroMAS-1 uses a modified CubeSat architecture. It features a unique dual-spinner assembly, 3-axis stability and pointing, deployable solar panels for increased power generation, and data management (Figure 1). The nanosatellite bus has a size of 10 cm x 10 cm x 34.05 cm consisting of a 1U payload and supporting a 2U bus connected via a spinner assembly. It operates in a dual-spin configuration with the payload spinning at a rate of ~0.8 Hz (50 rpm) while the bus maintains a stable, nadir-pointing configuration (Ref. 3).
The design for the FM (Flight Model) was greatly informed by the SWaP test model and EDM (Engineering Development Model) that were developed in the MIT/SSL during the summer of 2011. The process of designing, building, and testing these models provided the team with valuable insights into component configuration, acceptable mounting methods, and the assembly process. Lessons learned from the SWaP model and EDM are captured in the Test Results section.
The primary MicroMAS bus structural components consist of the scanner assembly, the bus chassis, the board stack, and the spring-tape monopole antenna support structures. The 2U bus contains all spacecraft supporting subsystems as well as a scanner assembly that spins the 1U radiometer payload at 0.8 Hz. MicroMAS flies in a "space-dart" formation with four double-sided 2U solar panels deployed at 120º, as shown in Figure 2.The ADCS (Attitude Determination and Control Subsystem) uses the x reaction wheel primarily to cancel out the angular momentum of payload scanner assembly. The scanner assembly consists of an Aeroflex Z-0250-050-3-104 brushless DC zero-cogging motor equipped with an Elmo Hornet motor controller, a MicroE M1500V encoder, and a MicroE 301-00075 rotary grating. 9) 10)

Legend to Figure 2: (a) Shown using AGI's STK with payload in operational mode. (b) Shown in body-centered frame as SolidWorks CAD model with representative payload module, ClydeSpace 2U body and double-sided deployed panels at a 120° angle.
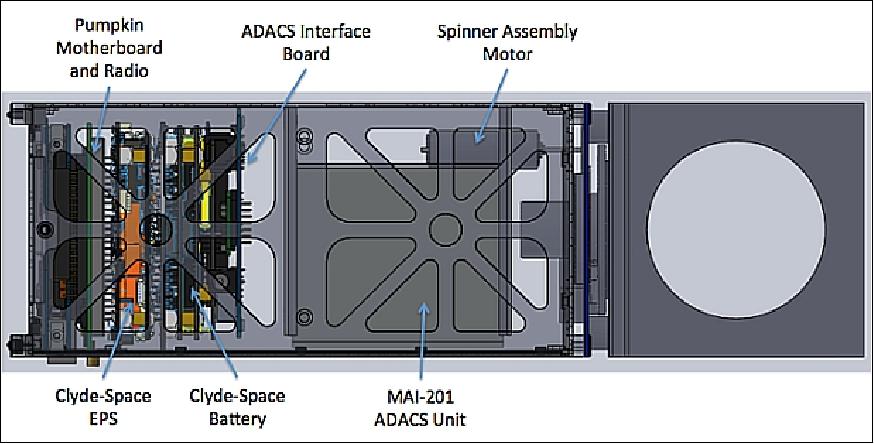
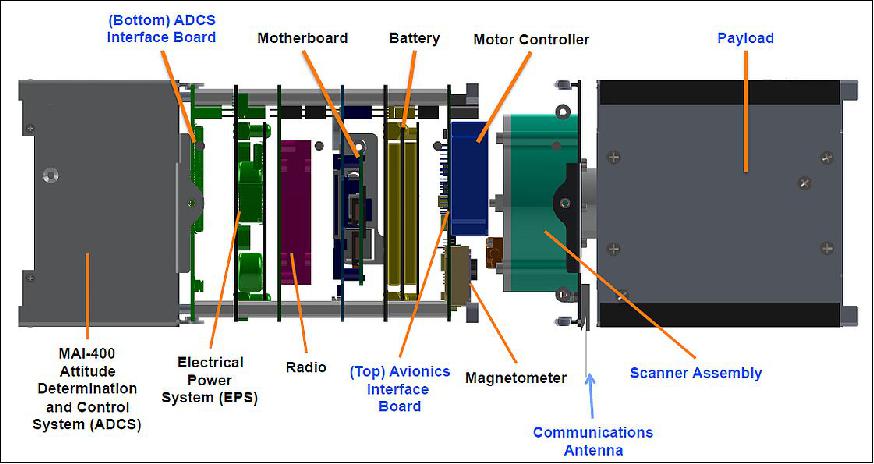
The spacecraft bus is comprised of a 0.5U external ADCS (Attitude Determination and Control Subsystem) unit and a custom-length 1.5U skeletonized chassis from Pumpkin Inc. Together, the bus stack matches the length of a standard 2U CubeSat and leaves a full 1U for the payload, including a 6 mm gap between the two bus structures to allow for spinner assembly clearance. The internal components of the FM bus stack are arranged in the following order, from bottom to top per Figure 4:
Custom ADCS interface board (also referred to as ADACS); S-band radio board; battery; EPS; motherboard; custom interface board for motor controller and magnetometer; encoder head, electronics, and disk; and spinner assembly motor. The location of the motherboard is of particular importance, as it must line up with one of the three access ports in the P-POD for access to the battery charging port and remove-before-flight pin after integration with the launch vehicle. A comparison of the internal components between the EDM and the FM can be seen in Figure 3 and Figure 4, respectively.
Thermal subsystem: Passive thermal management will be used as much as possible. Thermal tape will passively radiate heat out of the 2U bus structure. Currently, no satellite-level active control components are planned. However, individual satellite components will require active control for heating, especially components with limiting operational temperature ranges, such as the batteries. The thermal tape used to wrap the chassis has an absorptivity and emissivity of 0.5 except in the visible spectrum, where the absorptivity is 0.14. With these values, the average flux into MicroMAS by the heater plate, which emits in the IR spectrum, was approximately 20 W The IR radiation emitted by earth will contribute a constant 4.25 W.
ADCS (Attitude Determination and Control Subsystem): The original design for MicroMAS-1 required the entire spacecraft to rotate about its long axis. While spin-stabilized satellites have been around for many years, gyroscopic stiffness makes it difficult to maintain nadir pointing. A nadir-pointing spacecraft needs to rotate about its orbit-normal axis once per orbit (in LEO, this would be a period of roughly 90 minutes). Exchanging momentum while precessing in such an orbit requires high torques that are not readily available with COTS ADCS solutions. The radiometer pointing requirements (30 arcmin pointing accuracy and 6 arcmin attitude determination accuracy) requires actuators capable of fine manipulation of the spacecraft's angular momentum, such as reaction wheels. Additional control issues arise when considering that the ADCS system rotates with the spacecraft, so transferring angular momentum from one off-axis reaction wheel to the other off-axis reaction wheel as the spacecraft spins would require significant coordination between the sensors providing angular rate and displacement data and the reaction wheel controllers, thus requiring more power and more processor time on the spacecraft's flight computer.
Rather than spinning the entire spacecraft, then, a dual-spinning satellite design offers a solution. It is important to note that application of a counter-mass system would also provide a good solution; however, the weight limitation for CubeSats makes that solution undesirable. Unlike traditional dual spinners, which use the spinning part of the spacecraft to stabilize the pointing, for MicroMAS-1, the dual-spinner compensates for the payload spin. This solution offers the relative simplicity of a three-axis stabilized design. While the long-axis (x-axis) reaction wheel will suffer reduced control authority (since its equilibrium spin rate is nonzero to counter the spinning payload), few disturbance torques affect the satellite about its long axis, which is aligned with the spacecraft's velocity vector.
The design process for MicroMAS-1 involved an initial trade study on overall ADCS architectures (resulting in the three-axis stabilized dual-spinner) and several trade studies on COTS ADCS solutions (resulting in the selection of the MAI-400 mini-ADACS system), as well as extensive six-degree-of-freedom (DOF) modeling of the spacecraft, sensor, and actuator dynamics for estimator and controller development.
The selected ADCS assembly is from Maryland Aerospace Inc. (MAI), and contains a triaxial fluxgate magnetometer (RM 3000), two infrared Earth Horizon Sensors, and three torque rods, in addition to the reaction wheels. The reaction wheels serve as the primary means of canceling the momentum from the rotating payload, precessing the spacecraft as it orbits, and cancelling disturbance torques. 11)
ADCS Modes
MicroMAS has three main operational ADCS modes: Detumble, Slew, Stabilization, and Safe modes. In Detumble, the satellite will slow itself to a rate of less than 1º/s rotation using a B-dot control law. This consists of using the magnetometer to sense the rate of change of the Earth's magnetic field, and using the torque rods to dump momentum so that the satellite is no longer tumbling, but left in an arbitrary attitude.
After achieving less than 1º/s rotation, as measured using the IMU gyroscope, the satellite will switch into Slew mode. The objective of slew mode is to slew the satellite from its arbitrary attitude after detumble into an attitude where the correct body panel is nadir-pointing and the satellite is oriented correctly along-track as shown in Figure 2. The slew mode uses the MAI-400's TRIAD method of comparing two independent vector measurements with two reference vectors, and combining these to find the satellite's attitude in the body frame. The two vector inputs in slew mode are the magnetometer and sun sensor vectors. The magnetometer vector will use a truncated IGRF-11 (International Geomagnetic Reference Field-11) model of the Earth's magnetic field with 2010 coefficients, based on the altitude of the orbit and location in the orbit, as the reference vector. The sun sensor will use a coarse sun model from an astronomical almanac as a reference vector. The quaternion provided by TRIAD is run through an EKF (Extended Kalman Filter) in the flight processor. The EKF helps to filter much of the noise from the sensor measurements in order to make a more accurate prediction of attitude determination. The attitude estimate largely depends on the gyro measurements, and attitude measurements correct the estimate of the gyro bias. The slew mode uses the reaction wheels as the primary actuators, and uses the torque rods, which are duty cycled for operation with the reaction wheels, to dump excess momentum as continuously as possible. During slew mode, the Earth horizon sensors report telemetry, and slew mode is complete when lock on the Earth's limb is achieved.
The Earth limb lock enables the transition to Stabilization mode, where the satellite again uses the TRIAD method for attitude determination using the magnetometer and the Earth horizon sensors for the two vector measurements, and again the sensor inputs are run through an EKF. Throughout these modes, the x reaction wheel will spin at a constant speed of approximately 8000 rpm to counter the rotation of the spinning payload. This limits the momentum capabilities of the satellite, but modeling and simulation have shown that the MicroMAS can determine its attitude within 20 arcmin and maintain control within 30 arcmin even with this limitation (Ref. 9).
EPS (Electrical Power Subsystem): The orientation requirements for MicroMAS-1 do not permit sun tracking for maximum power generation. This drove the decision to use four 3U double-sided deployable solar panels oriented at 120º angles to the structure. Another 2U solar panel will be body-mounted on the zenith side of the satellite bus to provide additional power. This configuration has been modeled to generate an average power of 14.5 W in sunlight (12.7 W orbit average) at a 400 km altitude orbit when UTJ cells (Ultra Triple Junction, cells with 28.5% efficiency) are used. The MicroMAS-1 power subsystem components are produced by Clyde Space. 12)
The ClydeSpace CS-XUEPS2-41 EPS conducts power monitoring and conditioning and adjusts the operational voltage and current of photovoltaic cells to maximize power generation. The power is then stored in rechargeable 30 W hr lithium polymer batteries or sent directly to the loads at voltage levels of 3.3, 5, or 12 V.
C&DH (Command and Data Handling) subsystem: MicroMAS-1 uses a Pumpkin CubeSat Motherboard with a Microchip PIC24 microcontroller as the flight computer. Pumpkin's Salvo Real Time Operating System is used, and each peripheral (magnetometer, gyroscope, reaction wheels, modem, motor controller, payload, SD card) of the satellite will run as an operating system task in Salvo20. Physical interfaces to the MAI- 401 reaction wheels, modem, and SD card are implemented via the CSK (CubeSat Kit) bus, while interfaces to the magnetometer, gyroscope, motor controller, and payload will be through custom-designed PCBs.
TCS (Thermal Control Subsystem): Thermal management for MicroMAS involves onboard temperature monitoring, passive cooling, and some heating. On-board monitoring is achieved using Innovative Sensor Technology P1K0 RTDs. Passive thermal management is used as much as possible, though several individual components require active heating, specifically those with limiting minimum operating temperature values (e.g., ClydeSpace batteries, MicroE encoder sensor).
RF communications: The onboard communications system draws heavily from the USU (Utah State University) and the NSF DICE (Dynamic Ionosphere CubeSat Experiment) mission (launch Oct. 28, 2011) with a nearly identical architecture. The spacecraft transceiver is the half-duplex L-3 Communications Cadet UHF Nanosatellite radio. The ground station is the NASA Wallops Flight Facility 18 m dish equipped with the DICE radio and computer equipment (Ref. 9).
The uplink frequency is 450 MHz at ~9.6 kbit/s GFSK (19.2 kbit/s with FEC), and the downlink frequency is 468 MHz at ~1.5 Mbit/s OQPSK (3 Mbit/s with FEC). The average data rate from the payload to the bus for downlink is ~19.2 kbit/s. The radio includes a ~4 GB memory buffer which stores payload data and housekeeping telemetry between ground station passes. The L-3 Cadet UHF nanosatellite radio modem is not directly compatible with the CubeSat kit board stack architecture, therefore, a custom carrier card was designed to map its data signals to the appropriate pins on the bus. Additionally, the PDU circuits were added to allow the OBC to control power being supplied to the modem.
The Cadet radio is a compact, low power, high data rate transceiver with proven on-orbit capability and reliability. No larger than most cell phones, the Cadet makes use of SDR (Software Defined Radio) technology, providing exceptional mission agility for small satellite applications. The Cadet radio provides a "store and forward" architecture enabling users to receive data that is captured by small satellite sensors. A large 4GB memory buffer is used to store data and imagery. 13)
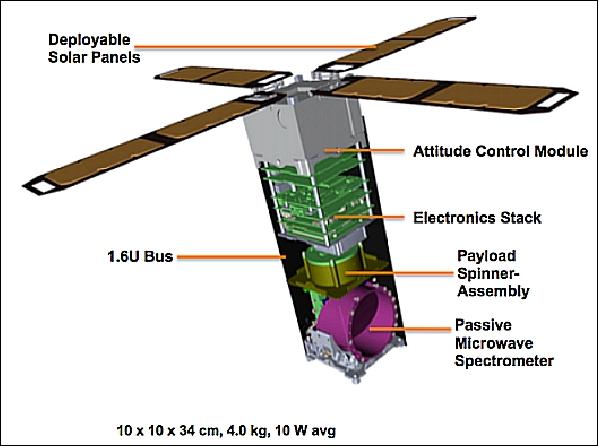
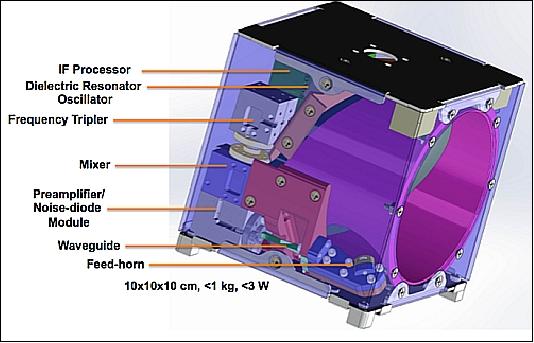
Legend to Figure 5: The complete spacecraft has been designed to meet the following requirements: mass of 4.25 kg, power < 10 W average, volume = 10 x 10 x 34 cm3. The body-mounted solar panels are not shown. Highly integrated electronics and the lack of an internal blackbody calibration target help reduce the required mass, power, and cost substantially relative to current systems. The payload mass is < 1 kg and average power consumption is < 3 W.
Overview of Mission Parameters
• Focus on hurricanes + severe weather
• 400 km initial orbital altitude
• 20 km pixel diameter at nadir (cross-track scan out to ±50°)
• 1 K absolute accuracy (0.3 K sensitivity)
• Geolocation error threshold 52 arcmin (30% of 20 km pixel diameter at altitude of 400 km)
• 19.2 kbit/s average downlink
• 10 W (average) power
• One year mission lifetime

Launch
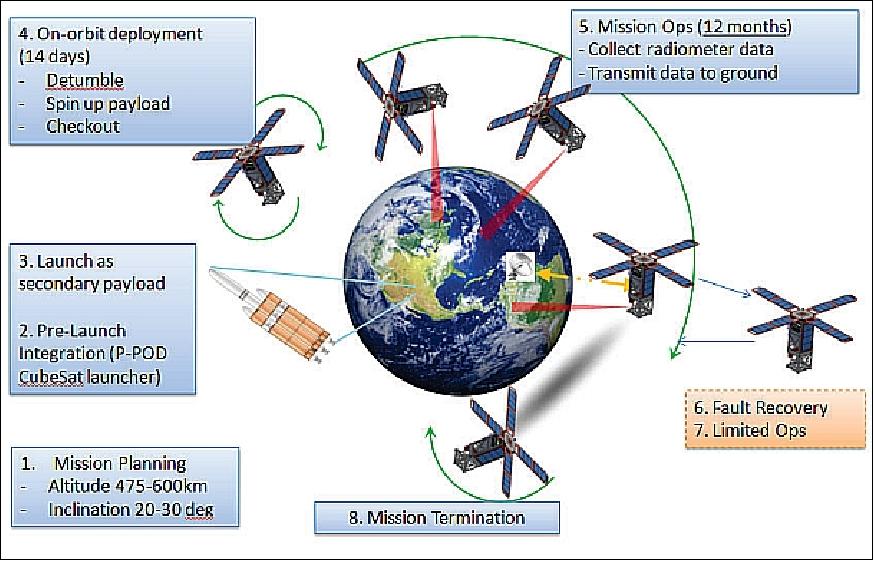
The MicroMAS nanosatellite was launched as a secondary cargo payload July 13, 2014 on the Cygnus CRS Orb-2 ISS resupply mission. The launch vehicle was Antares-120 of OSC and the launch site is MARS (Mid-Atlantic Regional Spaceport), Wallops Island, VA. The pressurized Cygnus spacecraft delivered 1,657 kg of cargo to ISS, including 300 kg of standard crew supplies, systems hardware and of science and research equipment. 14)
Orbit: Near-circular orbit , initial altitude of about 350-400 km, inclination 51.6º. The MicroMAS orbit is expected to decay to 300 km in about 75 days.
Secondary Payloads 15)
• Planet Labs' Flock-1b: A flock of 28 nanosatellites (additional to 28 Flock-1 nanosatellites launched on January 9, 2014) from Planet Labs of San Francisco are aboard to take pictures of Earth. After deployment from the Japanese JEM module (using the NanoRacks LLC Smallsat Deployment Program). Once deployed, these two flocks will work in unison and capture imagery of the entire planet on a more frequent basis, forming the largest constellation of imaging satellites in Earth orbit. 16) 17)
• TechEdSat-4 is a small CubeSat, built by NASA/ARC (Ames Research Center) in California that will investigate technology to return small samples to Earth from the space station. TechEdSat-4 will deploy using the NRCSD (NanoRacks CubeSat Deployer). Its primary objectives are to further develop a tension-based drag device, or "Exo-Brake," and demonstrate frequent uplink/downlink control capabilities.
• MicroMAS-1 (Microsized Microwave Atmospheric Satellite-1), a 3U CubeSat of MIT/LL (Massachusetts Institute of Technology/Lincoln Laboratory). The objective is to provide unprecedented observations of hurricanes and tropical storm dynamics.
• GEARRSAT (Globalstar Experiment And Risk Reduction Satellite), a CubeSat with a Globalstar communications terminal,built by NearSpace Launch. The objective is to study the Globalstar communications constellation.
• LambdaSat, a 1U Cubesat developed and operated by the Lambda Team, an international group including Greek scientists and students from San Jose, USA. The objective is to measure radiation effects on graphene material in LEO, and tracking vessels with an AIS receiver inside its footprint around the globe.
• Fifteen student experiments of the "Charlie Brown" mission are aboard and hosted by the SSEP (Student Spaceflight Experiment Program), an initiative of NCESSE (National Center for Earth and Space Science Education) and NanoRacks. They will investigate plant, lettuce, raddish and mold growth and seed germination in zero-G, penecilium growth, corrosion inhibitors, oxidation in space and microencapsulation experiments.
• SPHERES (Smart Synchronized Position Hold, Engage, Reorient Experimental Satellites) experiment of NASA/ARC features a sensor and multiple cameras to enable 3-D mapping and robotic navigation inside the space station.
General NanoRacks CubeSat/Nanosatellite Deployment Concept
The NanoRacks CubeSats/nanosatellites are delivered to the ISS already integrated within a NRCSD (NanoRacks CubeSat Deployer). The NRCSDs can be stored inside the ISS until a deployment is requested. 18)
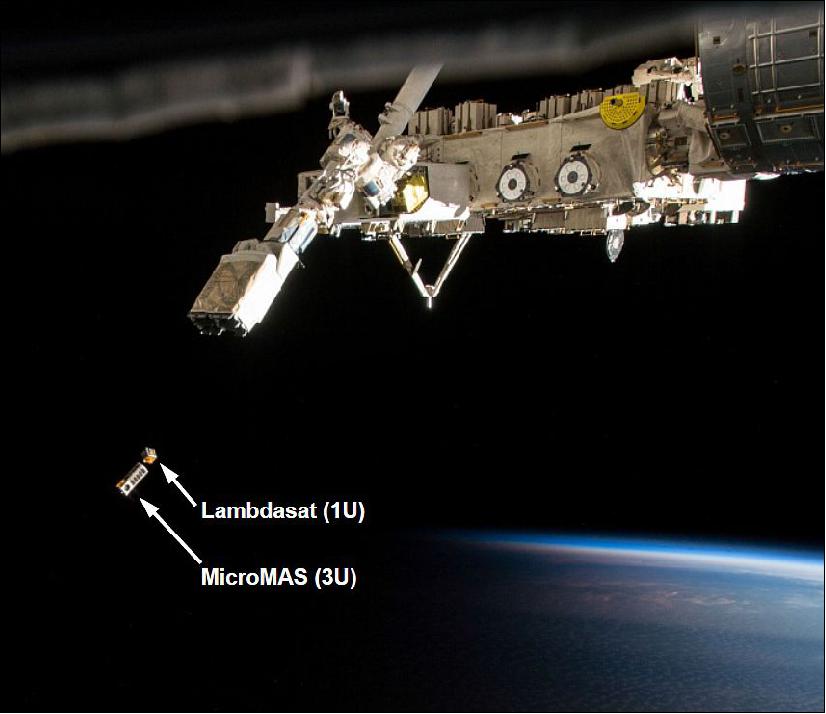
The secondary payloads (Flock-1b, TechEdSat-4, MicroMAS-1, GEARSSAAT, and LambdaSat) will be deployed from the Space Station using a deployment mechanism supplied by NanoRacks. The System uses the MPEP (Multi-Purpose Experiment Platform) of the JEM (Japanese Experiment Module) to which the NRCSDs (NanoRacks CubeSat Deployers) are attached. The dispenser holds up to sixteen 3U CubeSats and is attached to the MPEP that can be grappled by the JRMS (JEM Remote Manipulator System) and deploy the satellites in pairs upon command issued from inside the ISS or the JAXA Control Center in Tsukuba, Japan.
For a deployment, the platform is moved outside via the Kibo Module's Airlock and slide table that allows the JRMS to move the deployers to the correct orientation for the satellite release and also provides command and control to the deployers. Each NRCSD (NanoRacks CubeSat Deployer) is capable of holding six CubeSat Units - allowing it to launch two 3U satellites or a number of 2U and 1U satellites.
Deploying CubeSats from ISS has a number of benefits. Launching the vehicles aboard the logistics carrier of ISS visiting vehicle's reduces the vibration and loads they have to encounter during launch. In addition, they can be packed in protective materials so that the probability of CubeSat damage during launch is reduced significantly. Also, once arriving at the Space Station, the satellites can be checked pre-deployment, making sure any damage is detected before committing them to flight.
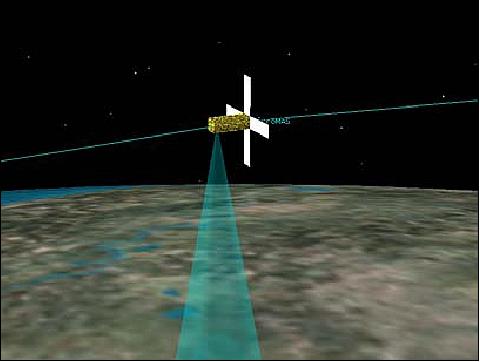
After a nominal operational lifetime of one year, with no propulsion on board, the orbit will eventually decay until the spacecraft reenters the atmosphere within the required 25 year time period. Figure 9 shows MicroMAS-1 on orbit with solar panels deployed as well as the radiometer field of view.
Mission Status
• August 2015: A MicroMAS-1 transmitter fault occurred two weeks into the mission. No payload data were downloaded to date. 19)
• After an ISS onboard waiting period of 8 months(Table 2), the MicroMAS-1 nanosatellite of MIT was deployed on March 4, 2015.
NanoRacks LLC of Houston, TX, is the only commercial company of NASA, providing on-board and on-ground services to the general 'small payload' research community of the International Space Station (ISS).
The NanoRacks deployment services for small satellites started initially by using the J-SSOD (JEM-Small Satellite Orbital Deployer) of JAXA. In October 2012, NanoRacks became the first company to coordinate the deployment of small satellites (CubeSats/nanosatellites) from the ISS via the airlock in the Japanese Kibo module. This deployment was done by NanoRacks using J-SSOD.
In 2013, NanoRacks sought permission from NASA to complement the JAXA J-SSOD with a larger model, NRCSD (NanoRacks CubeSat Deployer) , provided by NanoRacks to hold larger and more satellites. This new NanoRacks deployer system, was designed, manufactured and acceptance-tested by NanoRacks and launched on the Orbital Sciences Cygnus CRS-1 flight on January 9, 2014. It permitted NanoRacks the subsequent release of 33 CubeSats of their customers, using the new NanoRacks deployer system with the JEMRMS (JEM-Remote Manipulating System) of JAXA – to grapple and position for deployment.
The NRCSD deployer system broke down in August 2014, failing to release satellites when commanded. During the troubleshooting process in September, two satellites were inadvertently released. The deployers were returned inside the ISS through the airlock in the Japanese Kibo module in mid-September.
NanoRacks had built new deployers to correct the problem, it worked with NASA and other ISS partners to also attempt to repair the deployers currently on the station. After several months of hard work, the NanoRacks team was able to make adjustments to the deployers. The problems with the deployers were traced to screws that were not tightened correctly as well as issues with a power feed.
The repair work included installation of a new electronics system for the deployer and latches to prevent the premature deployment of the satellites. A SpaceX Dragon cargo spacecraft delivered the repair hardware to the ISS in January 2015. The station's crew made the repairs and successfully tested the latches on Feb. 17, and planned to attempt satellite deployments in the week of Feb. 23, 2015.
Since Feb, 27, 2015, a new deployment window opened. Included were 12 Planet Labs Doves (10 Flock-1B, 2 Flock-1D'), Spaceflight Services and MIT's MicroMAS, San Jose University and Greece's LambdaSat, NASA Ames' TechEdSat-4, and the GEARRSat CubeSat. 20)
• As of January 22, 2015, the secondary CubeSat payloads of the Cygnus CRS Orb-2 mission haven't been deployed due to an anomaly in the NRCSD (NanoRacks CubeSat Deployer) system. — NanoRacks expects the problem to be solved in a month's time. 21)
- On Sept. 17, 2014, the NanoRacks information is: 'NanoRacks is pleased to announce that the deployers and CubeSats have been safely brought back inside the ISS. At the same time, we continue to aggressively support NASA and JAXA activities to complete the NRCSD on-orbit anomaly fault tree analysis.' 22)
- On Sept. 10, 2014, the NanoRacks information is: 'The investigation of the anomalies on the CubeSat deployers continues and has three main components:
1) To understand the root cause of the behavior of the deployers
2) To put corrective actions into place
3) To plan a resumption in CubeSat deployments
We believe we are making progress in understanding the root cause of the anomalies. The team of NanoRacks and the CubeSat deployer manufacturer Quad M are now able to duplicate on the ground the anomalies observed in space.' 23)
- On Sept. 3, 2014, the NanoRacks information is: 'We are continuing our analysis into the non-performing CubeSat Deployers onboard the International Space Station (ISS).' 24)
Sensor Complement
Microwave Radiometer
The microwave sensor is a total-power radiometer/spectrometer based on MMIC (Monolithic Microwave Integrated Circuit) technology. The basic system architecture is identical to several on-orbit systems (AMSU, Aquarius, Microwave Limb Sounder, etc.). The principal challenge of developing a radiometer payload for a CubeSat is the high level of integration necessary to meet the SWaP (Size, Weight, and Power) requirements.
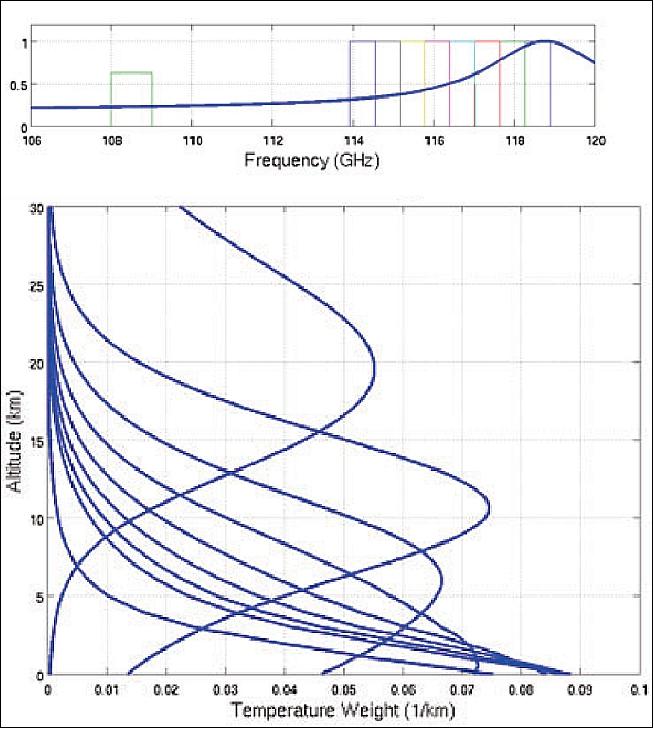
Antenna system: The MicroMAS antenna system uses an offset parabolic reflector to focus a conical scalar feed horn toward the Earth. The antenna reflector system has been extensively designed and analyzed, indicating a worst-case beam efficiency of 95% and a FWHM (Full Width Half Maximum) beamwidth of approximately 2.4º. A diffraction-limited 9 cm aperture antenna is used with a 3 dB beam, providing a nadir resolution of ~20 km to observe nine channels on the wings of a strong oxygen resonance at 118.75 GHz.
The MicroMAS radiometer measures the upwelling thermal emission in nine channels (Table 3). The channelization is based on previous work, with typical channel bandwidths of 625 MHz and typical NEDTs (Noise Equivalent Differential Temperatures) of approximately 0.3 K. A surface-sensitive window channel is measured near 108 GHz. Together, these observations result in the measurement of temperature and precipitation structures at altitudes from the surface to 20 km. The spinner assembly rate of 50 rpm (~0.8 Hz) to track across the Earth permits Nyquist sampling and the opportunity to improve spatial resolution after performing ground-based image sharpening.
A single receiver will be developed to cover 108-119 GHz, based partly on the UMass (University of Massachusetts) at Amherst development of the SEQUOIA focal plane array (85-116 GHz or 0.85-4 mm wavelength) for the LMT (Large Millimeter Telescope). 25) 26)
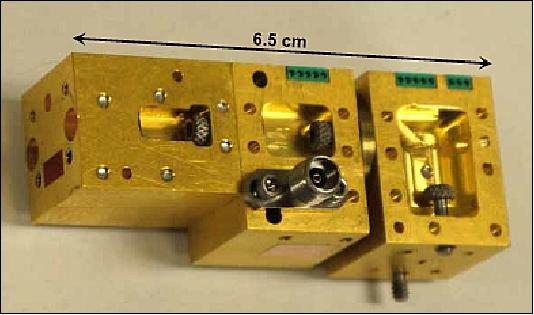
Legend to Figure 11: Shown from left to right are the tripler, mixer/preamp, and RF preamp/noise-diode. The flight assembly will integrate the tripler and mixer/preamp into a single block. The mass of the flight assembly will be less than 100 g.
The MicroMAS radiometer will be built in two parts: 1) a noise source and preamplifier, and 2) a module with additional gain at 118 GHz (if needed), a mixer, and an IF amplifier. The LO (Local Oscillator) for the mixer will be at 90 GHz, produced by a tripler housed in a separate block. The RF gain will exceed 40 dB and the IF gain will exceed 30 dB. The frontend receiver noise figure is not expected to exceed 5 dB. The total power consumption of all 118 GHz receiver components is not expected to exceed 2 W and total instrument mass is not expected to exceed 0.5 kg.
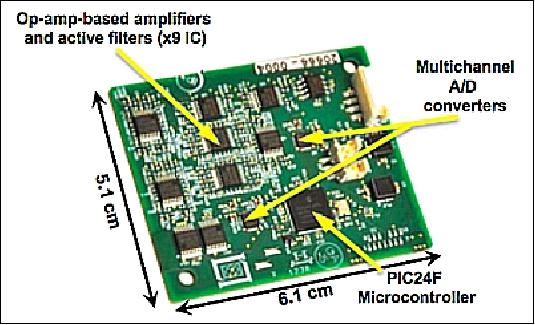
Eight channels are uniformly spaced in frequency from approximately 115 to 119 GHz, and one window channel is used at 108-109 GHz. An ultra-compact IFP (Intermediate Frequency Processor) module for channelization, detection, and analog to digital (A/D) conversion is a key technology development for MicroMAS-1. The IFP is shown in Figure 12.
The antenna system and radio-frequency (RF) front-end electronics are highly integrated, miniaturized and optimized for low-power operation. The payload also contains microcontrollers, one of which is used in the PIM (Payload Interface Module), to package and transmit radiometric and housekeeping data to the spacecraft bus. A VRM (Voltage Regulator Module) was also designed for the payload to convert the input bus voltage to the required voltages for the payload electronics. The payload requires 3 W (average) of power. The complete radiometer payload is shown in Figure 12.
LO and IF/baseband electronics: The millimeter wave receiver frontends, covering the 118 GHz band, are downconverted to K/Ka-band covering 18-29 GHz. The wideband IF will be amplified by two GaAs pHEMT (pico High Electron Mobility Transistor) MMICs before the channelizing filter. In the 118 GHz band, 18-19 GHz is used for surface sensing while the atmospheric channels fall between 23.5-28.5 GHz where they will be channelized into 8 x 625 MHz channels (Figure 15) requiring filters with 2.2-2.6% bandwidth.
At the output of each channel there will be a diode detector optimized for stable and linear response with a broadband resistive match for accurate power measurement. The detected signal will be amplified by a low-power CMOS op-amp and sampled by a 16 bit ADC. Each channel will be read into a small FPGA to aggregate, the data into a single data stream and interface it to the payload microprocessor.
Left edge (GHz) | Center (GHz) | Right edge (GHz) | Bandwidth (GHz) |
113.9135 | 114.2260 | 114.5385 | 0.625 |
114.5375 | 114.8500 | 115.1625 | 0.625 |
115.1615 | 115.4740 | 115.7865 | 0.625 |
115.7855 | 116.0980 | 116.4105 | 0.625 |
116.4095 | 116.7220 | 117.0345 | 0.625 |
117.0335 | 117.3460 | 117.6585 | 0.625 |
117.6575 | 117.9700 | 118.2825 | 0.625 |
118.2815 | 118.5940 | 118.9065 | 0.625 |
108.000 | 108.5000 | 109.0000 | 1.000 |
Legend to Figure 14: The frequency dependence of atmospheric absorption allows different altitudes to be sensed by spacing channels along absorption lines.
MicroMAS Science Objectives
Weather forecasting and warning applications rely increasingly on integrated observations from a variety of systems that are asynchronous in time and are nonuniformly spaced geographically. Critical observing system features include rapid update and full volumetric coverage. On regional scales, the combination of satellite data with automated meteorological measurements from aircraft and with a network of ground-based radars and meteorological instruments reporting in real time has been shown to provide enhanced nowcasting and short-term forecasting capabilities. Such capabilities improve severe local storm warnings (including forecasts of storm initiation, evolution, and decay), and they support activities such as construction, road travel, the needs of the aviation system (both civil and military), and recreation. The MicroMAS work focuses on improved rapid-update capabilities provided by a LEO (Low Earth Orbit) satellite constellation.
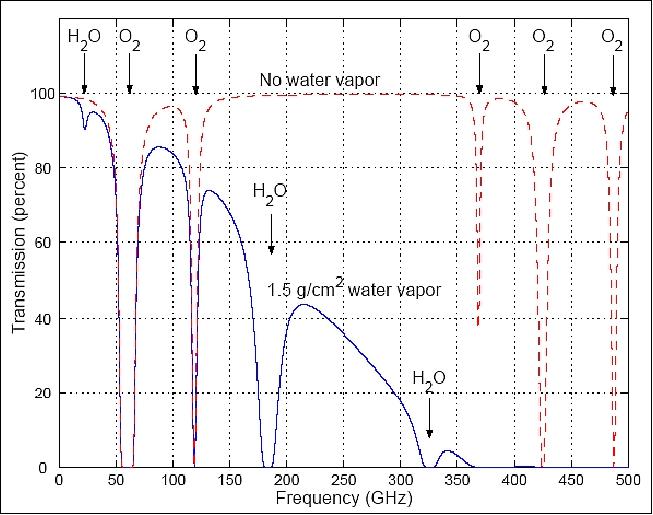
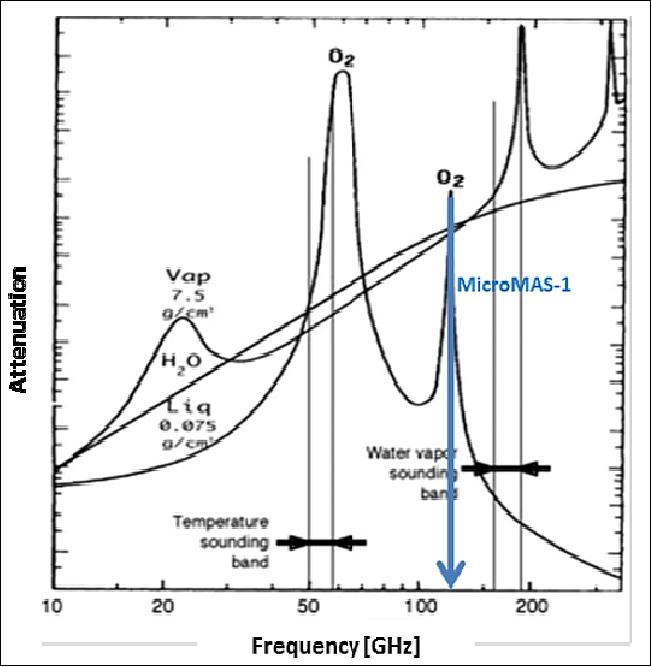
Oxygen band channels measure blackbody radiation emanating from atmospheric layers which are many kilometers thick and are centered at altitudes ranging between the surface and the stratosphere, depending on the observed radio frequency. Both the 60 GHz and 118 GHz resonant bands of oxygen exhibit similar ranges of atmospheric transmittances and have corresponding altitude responses, while also having a usefully different response to hydrometeors. The larger particles at the top of any precipitating column reflect the cold radiance of space into the antenna beam, thereby revealing the altitude of the reflecting layer, since only frequencies for which the atmosphere is transparent to those altitudes, will respond to the precipitation.
Background: Microwave atmospheric remote sensing systems observe the radiance from the atmosphere at microwave wavelengths. An antenna receives the radiation and then supporting electronics detects and amplifies this signal within a certain frequency band. This detected power level is used to generate temperature and moisture profiles of the atmosphere, which can inform meteorological modeling. Atmospheric elements have different absorption spectra, and sampling at different frequencies permits the observation of different atmospheric constituents which probe different depths of the atmosphere. For example, the microwave molecular oxygen line is very good for determining temperature distribution because its behavior is stable and well-known. Figure 16 shows atmospheric attenuation for various atmospheric species. MicroMAS-1 will observe in bands near the 118.75-GHz oxygen absorption line.
Fast-changing weather systems like cyclones and tropical storms require frequent coverage and quick data turnaround in order to adequately characterize their behavior. This is a major limitation of current spaceborne radiometer observing systems that will be addressed by MicroMAS-1 and follow-on missions.
The best current satellite spatial resolutions for routinely observing the warm cores of hurricanes, or "altitude slicing" their rain bands to determine altitudes, are ~50 km on AMSU (Advanced Microwave Sounding Unit), ~25 km on SSMIS (Special Sensor Microwave Imager Sounder), and ~33 km on ATMS (Advanced Technology Microwave Sounder) launched on Suomi NPP on Oct. 28, 2011. None of these satellites revisit any latitude lower than 50° more than twice daily (~12-hour intervals). MicroMAS-1, because of its low inclination orbit and low altitude, will not only revisit most hurricanes at least twice daily but sometimes may visit two or even three times daily at ~100 minute intervals for many storms in the outer 8º latitude bands, thus revealing for the first time the character of rapid thermal variations of a large variety of storms (Ref. 3).
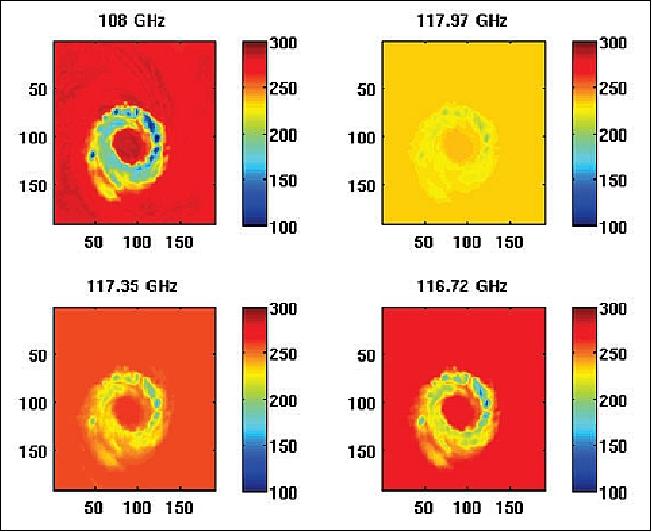
A MicroMAS brightness temperature simulation for Super Typhoon Pongsona (Dec. 8, 2002) is shown in Figure 17. Altitude slicing is revealed in the figure, and intense scattering from cloud ice particles is clearly evident as indicated by marked brightness temperature depressions (deep blue color in the images).
Goals: The MicroMAS-1 project represents one of the first attempts to perform an operational remote sensing science mission based upon the standard CubeSat modular architecture. Current Earth-observing satellites designed to collect atmospheric profile data such as the Suomi NPP or the DMSP (Defense Meteorological Satellite Program) satellite series are very expensive and require 5-10 years to develop and launch. Although each successful flight vehicle demonstrates an impressive array of capabilities, many large space system acquisition programs are continuously plagued by cost and schedule overruns. MicroMAS-1 seeks to implement one specific data collection capability on a much smaller scale. The MicroMAS-1 flight model promises comparable science return to other Earth observation satellite systems that are larger, heavier, require more power, and are more expensive to build and launch. In order to achieve this large reduction in cost and development effort, MicroMAS-1 is pursuing a strategy to design the system such that it fits within the 3U CubeSat standard and uses as many commercially available components as possible (Ref. 3).
The main science goals of MicroMAS-1 are:
4) Collect millimeter-wave radiometric images of tropical storms, hurricanes and cyclones.
5) Decrease GSD (Ground Sample Distance), which in this system is equivalent to GIFOV (Ground-projected Instantaneous Field of View), to provide finer detail in storm characterization.
6) Increase observational frequency to better resolve rapid cyclone development and dynamics.
7) Increase the number of spectral bands to improve the vertical resolution of the atmospheric temperature profile.
Future Applications
The relatively low cost of nanosatellite (3U CubeSat) remote sensing to be demonstrated by MicroMAS-1 facilitates the deployment of a constellation of sensors, spaced equally around several orbit planes. For example, a dozen satellites could provide average global revisit times approaching 20 minutes, a revolutionary step forward for atmospheric sounding and precipitation science. A small fleet of MicroMAS satellites could yield high-resolution global temperature and water vapor profiles, as well as cloud microphysical and precipitation parameters.
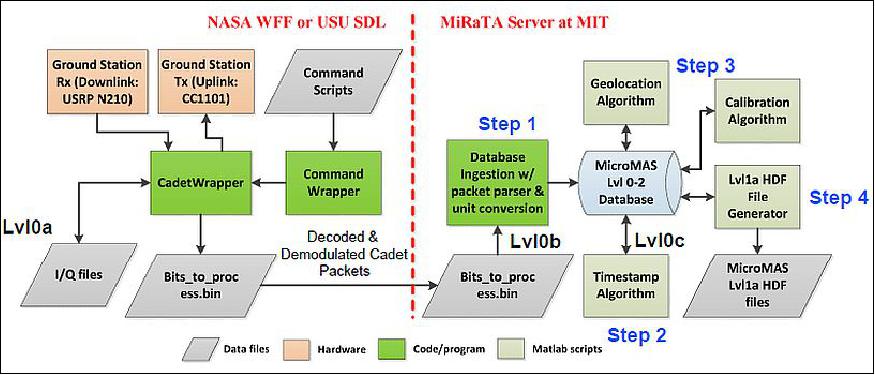
A follow-on mission, the MiRaTA (Microwave Radiometer Technology Acceleration) CubeSat mission, is scheduled for launch in 2016 into an orbit with ~400 km initial altitude and 51.6º inclination. The MiRaTA CubeSat will carry out the mission objectives over a 90 day mission, including the on-orbit checkout and validation period. MiRaTA is a 3U CubeSat comprising V- and G- band radiometers (52-58 GHz, 175-191 GHz, and 206.4-208.4 GHz), the CTAGS (Compact TEC/Atmosphere GPS Sensor) with five-element patch antenna array to permit radio occultation atmospheric profiles, and relatively standard CubeSat spacecraft subsystems for attitude determination and control, communications, power, and thermal control. The spacecraft dimensions are 10 cm x 10 cm x 34 cm, the total mass is 4.0 kg, and the total average power consumption is 6 W. The cross-track scanning capabilities to be demonstrated by MicroMAS together with the multi-band radiometer and GPS radio occultation capabilities of MiRaTA could be combined into a 6U CubeSat to offer unprecedented performance at very low cost (Ref. 9).
Ground Segment
• UHF/VHF station:
- MIT Radio Society is assembling a "standard" UHF/VHF station
- Two azimuth-elevation steerable yagi antennas
- Approximately 100 W
- The station is undergoing final integration in the spring of 2013.
• The primary ground station is the NASA Wallops Flight Facility 18 m dish equipped with the DICE radio and computer equipment.
References
1) W. Blackwell, G. Allen, C. Galbraith, T. Hancock, R. Leslie, I. Osaretin, L. Retherford, M. Scarito, C. Semisch, M. Shields, M. Silver, D. Toher, K. Wight, K. Cahoy, D. Miller, A. Marinan, S. Paek, E. Peters, F. Schmidt, B. Alvisio, E. Wise, R. Masterson, D. Miranda, N. Erickson, "Nanosatellites for Earth Environmental Monitoring - The MicroMAS Project," iCubeSat 2012, 1st Interplanetary CubeSat Workshop, Cambridge, MA, USA, May 29-30, 2012, URL: https://icubesat.files.wordpress.com/2012/06/icubesat-org-2012-b-2-4-_presentation_blackwell_201205292235.pdf
2) W. Blackwell, G. Allen, C. Galbraith, T. Hancock, R. Leslie, I. Osaretin, L. Retherford, M. Scarito, C. Semisch, M. Shields, M. Silver, D. Toher, K. Wight, D. Miller, K. Cahoy, N. Erickson, "Nanosatellites for Earth Environmental Monitoring: The MicroMAS Project," Proceedings of IGARSS (International Geoscience and Remote Sensing Symposium), Munich, Germany, July 22-27, 2012, URL: http://kcahoy.scripts.mit.edu/kcahoy/wp-content/uploads/2013/02/06185263.pdf
3) William J. Blackwell, G. Allen, S. Conrad, C. Galbraith, R. Kingsbury, R. Leslie, P. McKinley, I. Osaretin, W. Osborn, B. Reid, L. Retherford, M. Scarito, C. Semisch, M. Shields, M. Silver, D. Toher, R. Wezalis, K. Wight, Kerri Cahoy, David W. Miller, Anne Marinan, Sung Wook Paek, Eric Peters, Frank Hall Schmidt, Bruno Alvisio, Evan Wise, Rebecca Masterson, Danilo Franzim Miranda, "Nanosatellites for Earth Environmental Monitoring: The MicroMAS Project," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-I-2, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1015&context=smallsat
4) "Innovative microsatellite could expand understanding of storm systems," MIT/LL, June 2012, URL: https://web.archive.org/web/20150911003412/http://www.ll.mit.edu/news/micromas.html
5) K. Cahoy, R. Kingsbury, E. Peters, A. Marinan, M. Prinkey, E. Wise, P. Dave, S. Paek, C. Pong, D. Miller, D. Sklair, B. Coffee, L. Orrego, E. Main, K. Frey, R. Aniceto, P. Vaidyanathan, "Microsized Microwave Atmospheric Satellite (MicroMAS)," MIT/SSL, LL, April 28, 2013, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2013/Spring/Day%202/0950-Cahoy-MicroMAS.pdf
6) Bjorn Lambrigtsen, Alan Tanner, Todd Gaier, Pekka Kangaslahti, "A Baseline for the Decadal-Survey PATH Mission," Proceedings of IGARSS 2008 (IEEE International Geoscience & Remote Sensing Symposium), Boston, MA, USA, July 6-11, 2008
7) Bjorn Lambrigsten, S. T. Brown, T. C. Gaier, L. Herrell, P. P. Kangaslahti, A. B. Tanner, "Monitoring the Hydrologic Cycle With the PATH Mission," Proceedings of IEEE, Vol. 98, Issue 5, May 2010, pp. 862-877
8) "Innovative microsatellite could expand understanding of storm systems," MIT/LL, June 2012, URL: https://web.archive.org/web/20150911003412/http://www.ll.mit.edu/news/micromas.html
9) William Blackwell, G. Allen, C. Galbraith, R. Leslie, I. Osaretin, M. Scarito, Mike Shields, E. Thompson, D. Doher, D. Townzen, A. Vogel. R. Wezalis, Kerri Cahoy, David W. Miller, Anne, Marinan, Ryan Kingsbury, Evan Wise, Sung Wook Paek, Eric Peters, Meghan Prinkey, Pratik Dave, Brian Coffee, Neal R. Erickson, "MicroMAS: A First Step Towards a Nanosatellite Constellation for Global Storm Observation," Proceedings of the AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-XI-1, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2985&context=smallsat
10) Kerri Cahoy, J.M. Byrne, T. Cordeiro, P. Davé, Z. Decker, A. Kennedy, R. Kingsbury, A. Marinan, W. Marlow, T. Nguyen, S. Shea, William J. Blackwell, G. Allen, F. Busse, C. Galbraith, A. Jensen, V. Leslie, I. Osaretin, M. DiLiberto, P. Klein, M. Shields, E. Thompson, D. Toher, D. Townzen, A. Vogel, "The Microwave Accelerometer Technology Acceleration CubeSat (MiRaTA)," ESTF 2014 (Earth Science Technology Forum), Leesburg, VA, USA, Oct. 28-30, 2014, URL: http://esto.nasa.gov/forum/estf2014/presentations/B2P3_Cahoy.pdf
11) http://www.miniadacs.com/linked/2012-04-27%20mai-400%20a%20la%20carte%20specification.pdf
12) http://www.clyde-space.com/cubesat_shop
13) "Cadet Nanosat Radio," L-3 Communications, URL: http://www2.l-3com.com/csw/ProductsAndServices/DataSheets/Cadet_Nanosatellite_Radio_Sales-Sheet_WEB.pdf
14) "Orbital-2 Mission to the International Space Station," NASA Media Press Kit, July 2014, URL: http://www.nasa.gov/sites/default/files/files/Orb2_PRESS_KIT.pdf
15) Patrick Blau, "Cygnus Orb-2 Cargo Manifest," Spaceflight 101, URL: http://www.spaceflight101.com/cygnus-orb-2-cargo-manifest.html
16) "Orbital Sciences' Successfully Berthed Cygnus to ISS in Second Resupply Mission," NanoRacks Press Release, July 16, 2014, URL: http://nanoracks.com/orbital-sciences-successfully-berthed-cygnus-to-iss-in-second-resupply-mission/
17) "Spaceflight, NanoRacks Partnership Launches Additional Planet Labs Flock Onboard Orbital Sciences' Orb-2 Mission," Spaceflight Inc., July 16, 2014, URL: http://spaceflightservices.com/tag/launch/
18) "NanoRacks-Microsized Microwave Atmospheric Satellite (NanoRacks-MicroMAS)," NASA, July 15, 2014, URL: http://www.nasa.gov/mission_pages/station/research/experiments/1330.html#operations
19) W. Blackwell, J. Pereira, "New Small Satellite Capabilities for Microwave Atmospheric Remote Sensing: The Earth Observing Nanosatellite-Microwave (EON-MW)," Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3292&context=smallsat
20) "NanoRacks Completes Historic Third Round of ISS CubeSat Deployments," Space Daily, March 11, 2015, URL: http://www.spacedaily.com/reports/NanoRacks_Completes_Historic_Third
_Round_of_ISS_CubeSat_Deployments_999.html
21) Information provided by Abby Dickes of NanoRacks.
22) "Update #3 On NanoRacks CubeSat Deployer Anomaly," NanoRacks, Sept. 17, 2014, URL: http://nanoracks.com/update-3-on-cubesat-deployer-anomaly/
23) "Update on NanoRacks CubeSat Deployer Anomaly Review," NanoRacks, Sept. 10, 2014, URL: http://nanoracks.com/update-on-cubesat-deployer-anomaly-review/
24) "NanoRacks Examining CubeSat Deployment Anomalies," NanoRacks, Sept. 3, 2014, URL: http://nanoracks.com/nanoracks-examining-cubesat-deployment-anomalies/
25) http://www.astro.umass.edu/~fcrao/instrumentation/sequoia/seq.html
26) NOTE: LMT is a bi-national Mexican (80%) – American (20%) joint project of the Instituto Nacional de Astrofísica, Óptica y Electrónica (INAOE) and the University of Massachusetts at Amherst. The LMT is the world's largest and most sensitive single-aperture telescope in its frequency range, built for observing radio waves in the wave lengths from approximately 0.85 to 4 mm. It has an active surface with a diameter of 50 m and 2000 m2 of collecting area. The LMT (Spanish: Gran Telescopio Milimétrico, or GTM) was inaugurated in Mexico on 22 November 2006 (first light in 2011). It is located on top of the Sierra Negra, the fifth highest peak in Mexico (4640 m) and an extinct volcanic companion to Mexico's highest mountain, the Pico de Orizaba, in the state of Puebla.
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Stations References Back to Top