Munin Nanosatellite
EO
Atmosphere
Cloud type, amount and cloud top temperature
Cloud cover
Quick facts
Overview
| Mission type | EO |
| Agency | IRF |
| Mission status | Mission complete |
| Launch date | 21 Nov 2000 |
| End of life date | 01 Feb 2001 |
| Measurement domain | Atmosphere, Gravity and Magnetic Fields |
| Measurement category | Cloud type, amount and cloud top temperature, Gravity, Magnetic and Geodynamic measurements, Atmospheric Winds |
| Measurement detailed | Cloud cover, Cloud imagery, Atmospheric specific humidity (column/profile), Atmospheric temperature (column/profile), Cloud top temperature, Atmospheric stability index |
| Instruments | CCD camera |
| Instrument type | Space environment, Magnetic field, Other, Atmospheric chemistry, Communications, Data collection |
| CEOS EO Handbook | See Munin Nanosatellite summary |
Munin (Name of Creature from Nordic Mythology - Translates as "Memory")
Munin is a joint nanosatellite pilot project between IRF (Institutet för rymdfysik - Swedish Institute of Space Physics), students at Umeå University (RYP), students at Luth (Luleå University of Technology), the former institutions are located in Sweden, and SwRI (Southwest Research Institute) in San Antonio, Texas, USA.
The scientific objective of Munin is to collect data on the auroral activity on both the northern and southern hemispheres (and distribution of electrons, ions and neutral particles), such that a global picture of the current state of space weather activity can be made available on-line. 1) 2) 3) 4)
The name of the satellite comes from Nordic mythology: “The ravens Munin and Hugin flew out and brought back news from every corner of the world. Sitting on the God Odin's shoulders, they whispered all the news in his ears. Munin represented the memory and Hugin the intelligence... and they were his embodied soul...”
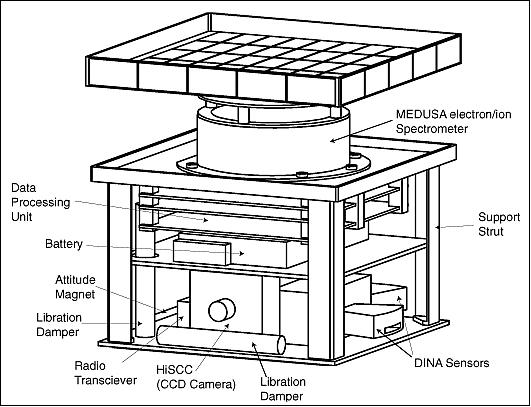
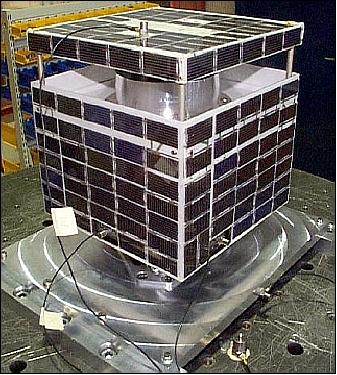
Spacecraft
The nanosatellite is of size 21 cm x 21 cm x 22 cm, it uses a passive magnetic stabilization system, a permanent magnet holds the satellite aligned along the geomagnetic field lines (like a compass needle). Since the S/C does not require high precision pointing, the attitude problem of restoring torque is solved by the use of a permanent magnet. Average pointing accuracies of ±5º are achieved. There are no actuators and traditional orientation sensors for attitude control. There are also no moving parts, such as deployable booms, etc.
The S/C attitude is determined by the Kiruna ground station from the following inputs: a) current measurements of the six solar arrays which cover each side of the S/C body, b) the data of two single-axis on-board magnetometers which measure the H vector, and c) images of the Earth's limb and of stars by a CCD camera. The passive magnetic attitude stabilization system of Munin, developed by IRF in cooperation with the Keldish Institute of Applied Mathematics, Moscow, employs a magnetic hysteresis damper. 5) 6) 7)
The satellite is covered with solar cells (Si) on all surfaces, which provide enough power (6 W) when the satellite is in sunlight and recharge a battery (lithium-ion pack from Duracell) for power during eclipse periods (4.2 Ah). S/C mass = 6 kg. On-board data storage of 2 MByte of RAM (Random Access Memory).
RF communications
The data is downlinked with a radio modem [a TEKK KS-1000 UHF transceiver at 405.55 MHz downlink and 449.95 MHz uplink, data rate between 4.8 - 19.2 kbit/s] during passes over the Kiruna ground station (68º N, 20º E). It is made available to all on Internet immediately after reception for space weather forecasts (auroral oval, geomagnetic storms, etc.).
Launch
Munin was launched as a secondary payload on a Delta 7320-10 launcher from VAFB on Nov. 21, 2000 (the primary payloads were EO-1 of NASA and SAC-C of CONAE, Buenos Aires, Argentina).
Orbit
Elliptical polar orbit of 700 km x 1850 km, inclination =96.5º, period of ~ 110 minutes (for Munin only, the other two S/C were separated and put into a sun-synchronous orbit at 707 km altitude).
Mission Status
Munin worked flawlessly for 3 months collecting good data from the instruments onboard. On the last day of operations, the project discovered a corruption in the volatile memory (RAM). However, after a manual CPU reset, Munin has been quiet, probably due to a boot PROM failure. The very last contact with Munin was on Dec. 2, 2001. 8)
• Munin successfully made energetic particle measurements over its lifetime and returned much useful data to the ground. It showed that a simple space weather nanosat can be built today using existing technologies and the adoption of simple strategies (e.g. UHF radio link).
• Munin is Europe's first scientific nanosatellite (making space weather observations).
• A key lesson: On-board autonomy eliminates the need of routine command uplinks & reduces impact of radiation.
Sensor Complement
Instrument | Measurement range | FOV | Time resolution (s) | Look | Mass (kg) | Power (mW) |
MEDUSA | 2 eV-15 keV | 10º x 360º | 0.25 | 0-180 | 0.6 | 1000 |
DINA | 20-2400 keV | 5º x 30º | 0.25 | 0 & 90 | 0.34 | 500 |
HiSCC | 320 x 249 pixels | 50º | 30-60 | 0 | 0.10 | 300 |
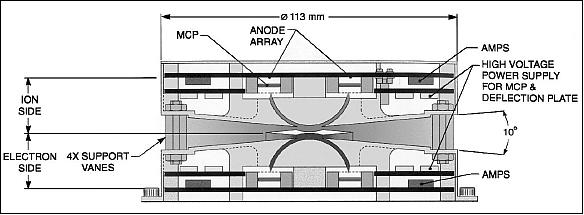
MEDUSA (Miniaturized Electrostatic Dual-tophat Spherical Analyzer)
MEDUSA is a joint instrument (of Astrid-2 heritage) provided by SwRI and IRF-K. MEDUSA is a combined electron and ion spectrometer. Objective: simultaneous measurement of electrons and ions with energies up to 18 keV/q with a resolution of 16 energy sweeps/s for electrons, and 8 sweeps/s for ions. Particles are measured in 16 sectors in the plane of acceptance, which is aligned with the Earth's magnetic field. Particles enter the spectrometer aperture at any angle in the plane of incidence, electrons and ions are then deflected into their respective spectrometer unit by a spherical electrostatic analyzer. The particles hit a microchannel plate after being filtered in energy in the electrostatic analyzer, the hits are counted by preamplifiers connected to registers, and the hits per sample interval are then further processed by the data processing unit (DPU). The mass of MEDUSA is 0.6 kg, the power consumption is 1000 mW. 9)

DINA (Detector of Ions and Neutral Atoms)
DINA is a solid-state neutral particle detector of IRF (heritage of PIPPI on Astrid-1). The objective of DINA is to extend the measurements of the precipitating ions to the higher energy range 20 - 500 keV complementing the MEDUSA experiment (also measurement of ENA). 10)

The instrument consists of two sensors with an aperture of 5º x 30º each (angular resolution: 2.5º x 25º). The sensor DINA-0 is looking at 180º pitch angle, DINA-90 is looking at 90º pitch angle. The mass of DINA is 0.340 kg, the power consumption is 500 mW. DINA performs alternate measurements of ions and energetic atoms. Mass identification is performed by (Delta E) / E detectors). For the energy range 20 - 100 keV, the front detector provides integral flux of all masses.
Over the northern hemisphere DINA-0 provides measurements of the ion precipitating flux during the auroral oval crossing. While the S/C moves through the polar cusp, DINA-90 makes measurements of ENA (Energetic Neutral Atoms) flux from the exosphere at one local time sector. Over the southern hemisphere DINA-0 pointing down in the southern hemisphere is aimed to detect outflowing ENA in the precipitation region. The information about input ion flux can be obtained from the DINA-90 measurements because the precipitating ion distribution can be considered approximately isotropic.
HiSCC (Visible imager)
HiSCC is a miniaturized CCD camera in the visible range to image the aurora. The camera has a field-of-view of 34º x 44º, and a resolution of 340 x 240 pixels. The camera is being used both for auroral imaging and attitude determination.
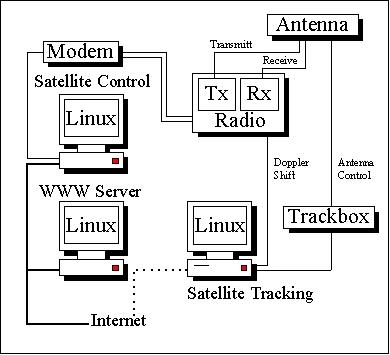
Ground Segment
The IRF Satellite Ground Station ”Snickerboa” is used for communications with Munin. The ground station software has been updated to use the Linux operating system and direct web publishing of the data. 11)
References
1) http://munin.irf.se/frames/index.html
2) K. Johnsson, “Munin - A Swedish Nanosatellite,” Proceedings of 4th IAA Symposium on Small Satellites for Earth Observation, April 7-11, 2003, Berlin, Germany
3) K. Johnson, “Munin - A Swedish Nanosatellite,” http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-0406P.pdf
4) J. A. Ahl, “Software Modem for the Munin nano Satellite,” Master's Thesis, 2001:304, ISSN: 1402-1617, ISRN: LTU-EX--01/ 304--SE, URL: http://epubl.luth.se/1402-1617/2001/304/LTU-EX-01304-SE.pdf
5) M. Ovchinnikov, V. Pen'kov, O. Norberg, S. Barabash, “Attitude Control System for the First Swedish Nanosatellite “Munin,” Acta Astronautica, Vol. 46, No 2-6, 2000, pp. 319-326
6) O. Norberg, W. Puccio, J. Olsen, et al., “Munin: A Student Nanosatellite for Space Weather Information,” Proceedings of the COSPAR Colloquium on Scientific Microsatellites, “Microsatellites as Research Tools,” Tainan, Taiwan, 1997
7) M. Hapgood, S. Eckersley, R. Lundin, M. Kluge, U. Prechtel, P. Hyvönen, “Nanosatellite Beacons for Space Weather Monitoring,” URL: http://epubs.cclrc.ac.uk/bitstream/765/nsat_paper_final.pdf
8) http://munin.irf.se/frames/technology_index.html
9) O. Norberg, J. D. Winningham, H. Lauche, W. Keith, W. Puccio, J. Olsen, K. Lundin, J. Scherrer, “The MEDUSA electron and ion spectrometer and the PIA ultraviolet photometers on Astrid-2,” Annales Geophysicae, Vol. 19, 2001, pp. 593-600, ® European Geophysical Society 2001, URL: http://www.ann-geophys.net/19/593/2001/angeo-19-593-2001.pdf
10) http://munin.irf.se/frames/tecnology_main_inst_dina.html
11) http://munin.irf.se/frames/tecnology_main_ground.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).