NEMO-HD (Nanosatellite for Earth Monitoring and Observation – High Definition)
EO
Ocean
Multi-purpose imagery (ocean)
Imaging multi-spectral radiometers (vis/IR)
Quick facts
Overview
| Mission type | EO |
| Agency | UTIAS / SFL |
| Mission status | Operational (nominal) |
| Launch date | 03 Sep 2020 |
| Measurement domain | Ocean, Land, Snow & Ice |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Vegetation, Landscape topography, Lightning Detection |
| Measurement detailed | Vegetation Cover, Land surface topography, Sea-ice cover, Snow cover, Sea-ice sheet topography, Visibility, Water vapour imagery |
| Instruments | Imager, HF Beacon Transmitter |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers |
| CEOS EO Handbook | See NEMO-HD (Nanosatellite for Earth Monitoring and Observation – High Definition) summary |
NEMO-HD (Nanosatellite for Earth Monitoring and Observation – High Definition)
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
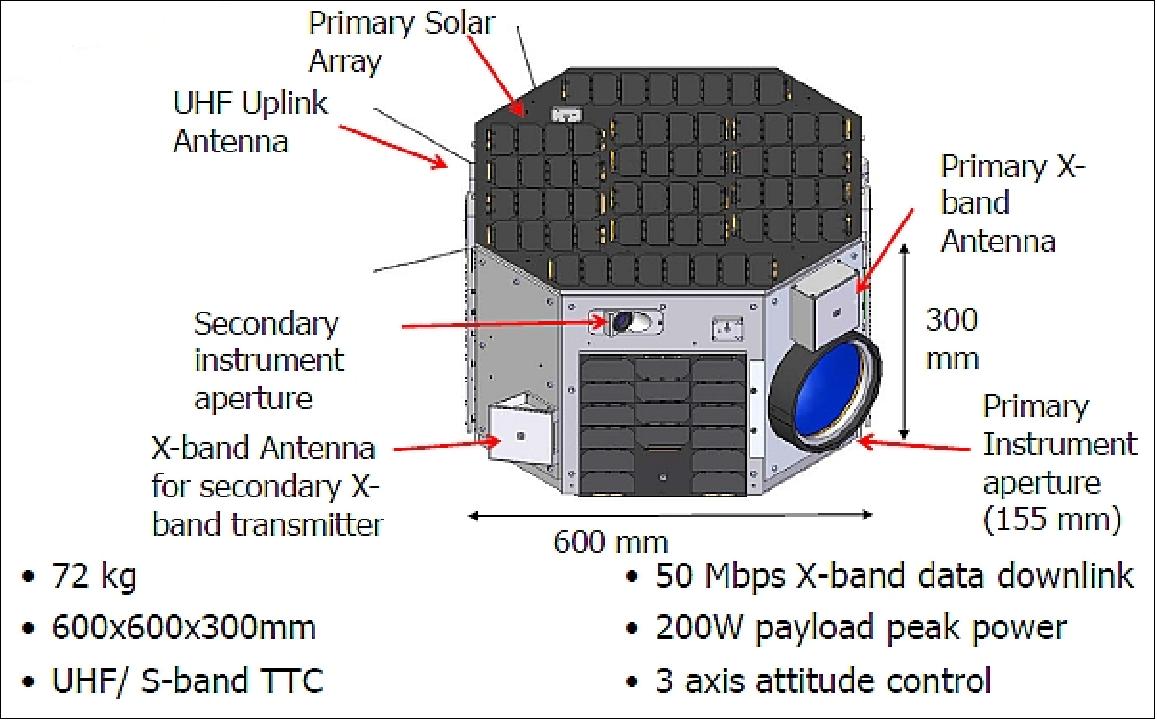
UTIAS/SFL (University of Toronto Institute for Aerospace Studies/Space Flight Laboratory) in collaboration with the Slovenian Centre of Excellence for Space Sciences and Technologies (SPACE-SI) is developing a 72 kg microsatellite for Earth monitoring and observation that is capable of resolving a GSD (Ground Sampling Distance) of 2.8 m on a swath of 10 km from a design altitude of 600 km.
SPACE-SI is located in Ljubljana, Slovenia. It has been established by a consortium of academic institutions, high-tech SMEs (Small and Medium sized manufacturing Enterprises) and large industrial and insurance companies in order to take advantage of the benefits of small satellite technologies and applications in Earth observation, meteorology and astrophysics. The RTD (Research and Technology Development) activities of SPACE-SI are focused on high resolution interactive remote sensing and formation flying missions. 1) 2)
NEMO-HD is the second spacecraft that is based on SFL's high-performance NEMO bus and builds upon the heritage of SFL's flight-proven GNB (Generic Nanosatellite Bus). The primary mission requirements for NEMO-HD can be summarized as follows: 3) 4) 5) 6) 7)
• The spacecraft is to capture imagery at 2.8 m GSD on a swath of 10 km from the reference orbit. The still images are to be captured at four spectral bands: 450-520 nm, 520-600 nm, 630-690 nm, and 760-900 nm. These images are to be captured with a minimum SNR (Signal-to -Noise Ratio) of 75, assuming a 30% target reflectivity. The optical system is required to have a minimum MTF (Modulation Transfer Function) of 0.10.
• The reference orbit is sun-synchronous at an altitude of 600 km with a LTAN (Local Time of Ascending Node) at 10:30 hours. The reference orbit results in an average of three passes during day time and three passes during night time over Slovenia.
• In addition to the high-resolution still image capture capability, the spacecraft is to capture color HD (1920 x 1080 pixels) video at two resolutions: high resolution at 2.8 m GSD and low-resolution at 75 m (or better) GSD. Both resolutions shall include H.264 compression.
• The captured still images and video data are to be downloaded via X-band up to speeds of 50 Mbit/s. The required data rates for command uplink and telemetry downlink are 4 kbit/s and 8 kbit/s, respectively.
• The required mission lifetime is one year in the reference orbit.
The collaboration of UTIAS/SFL and SPACE-SI includes the following items:
• UTIAS/SFL-designed the spacecraft and the primary instrument
• SPACE-SI experimental payload
• SPACE-SI experimental technologies. This comprises image processing and real-time interactive attitude control.
• Primary instrument features:
- Pan-sharpened, 4-channel multispectral imager with HD video
- GSD : 2.8 m (HRS-PAN/HR-HD), 5.8 m (HRSMS1/2/3/4)
- Swath: 10.8 km (HRS-PAN), 5.4 km (HR-HD), 11.9 km (HRS-MS1/2/3/4).
Spacecraft
NEMO-HD is based on an evolved NEMO bus architecture, first used for the ongoing development of the NEMO-AM spacecraft for ISRO. The NEMO-HD platform makes use of essentially the same avionics as SFL's GNB (Generic Nanosatellite Bus) missions. This includes the HKC (House Keeping Computer), ADCC (Attitude Determination and Control Computer), GPS Receiver, Fine Sun Sensors, magnetometer, Star Tracker, and magnetorquer. The NEMO platform makes use of larger reaction wheels due to the larger spacecraft inertia of the NEMO-HD platform compared with the GNB platform. 9)
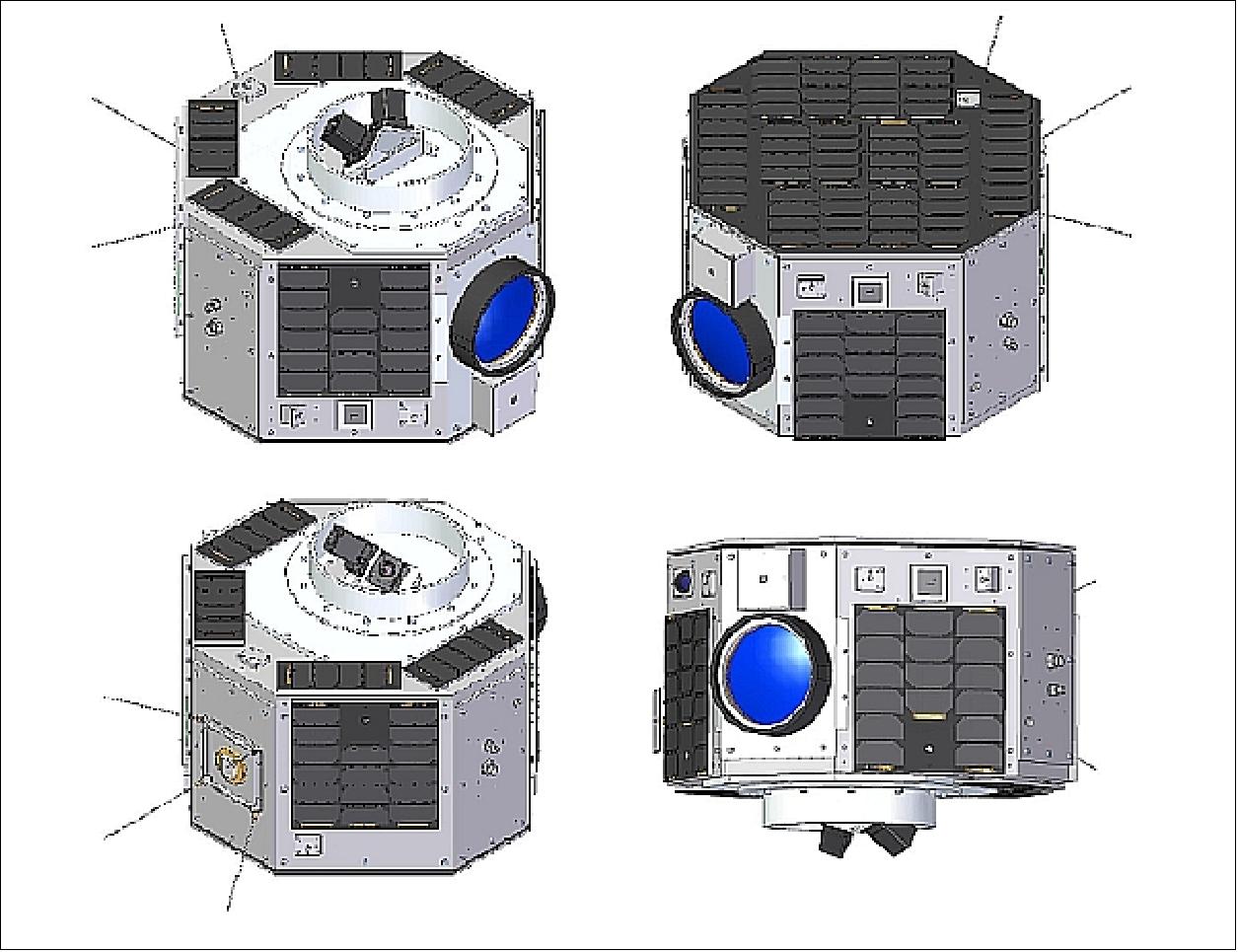
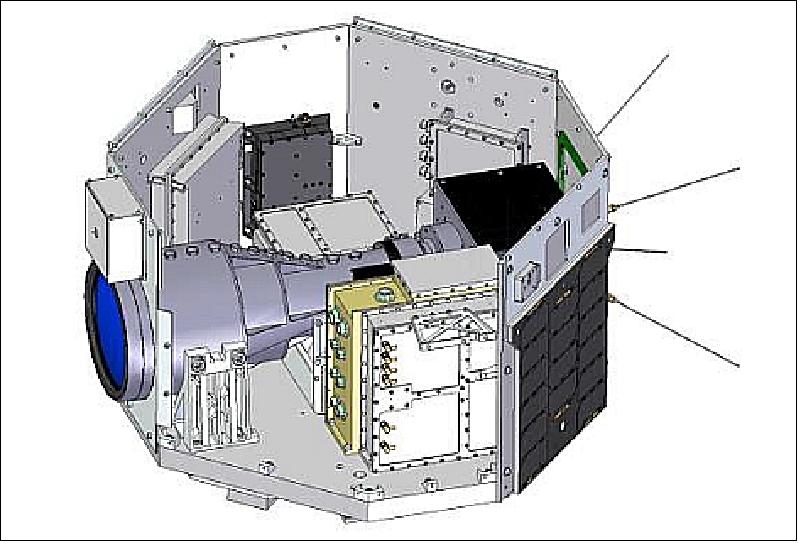
The spacecraft model is shown in Figures 2 and 3. As can be seen, the spacecraft is essentially designed around the payload. The payload optical bench, which comprises approximately one half of the spacecraft mass, is mounted to the bottom panel, which also carries the PAF (Payload Adapter Fixture), used to connect the spacecraft to the launch vehicle. In this arrangement, the load path from the payload to the PAF is short, and the spacecraft strong back can be small.
The remainder of the spacecraft body consists of panels which are bolted together to form a monocoque structure. Spacecraft bus components, as well as some components of the payload electronics, are mounted in enclosures which are then bolted to the body panels. Six of the ten spacecraft body panels also carry solar cells on their exterior. On the outside of the spacecraft are the various apertures which are required for proper operation of the spacecraft: attitude sensors, antennas, etc.
MPS (Modular Power System)
UTIAS/SFL has developed a multi-mission MPS (Modular Power System) to facilitate missions with power requirements spanning two orders of magnitude. The MPS is designed to provide "only as much power system as needed", and the ultra-high efficiency of each card makes the system suitable for missions ranging from the 1-10 W nanosatellite class (such as SFL's CanX-7) to the 100-500 W class microsatellite (such as SFL's NEMO-HD). 10)
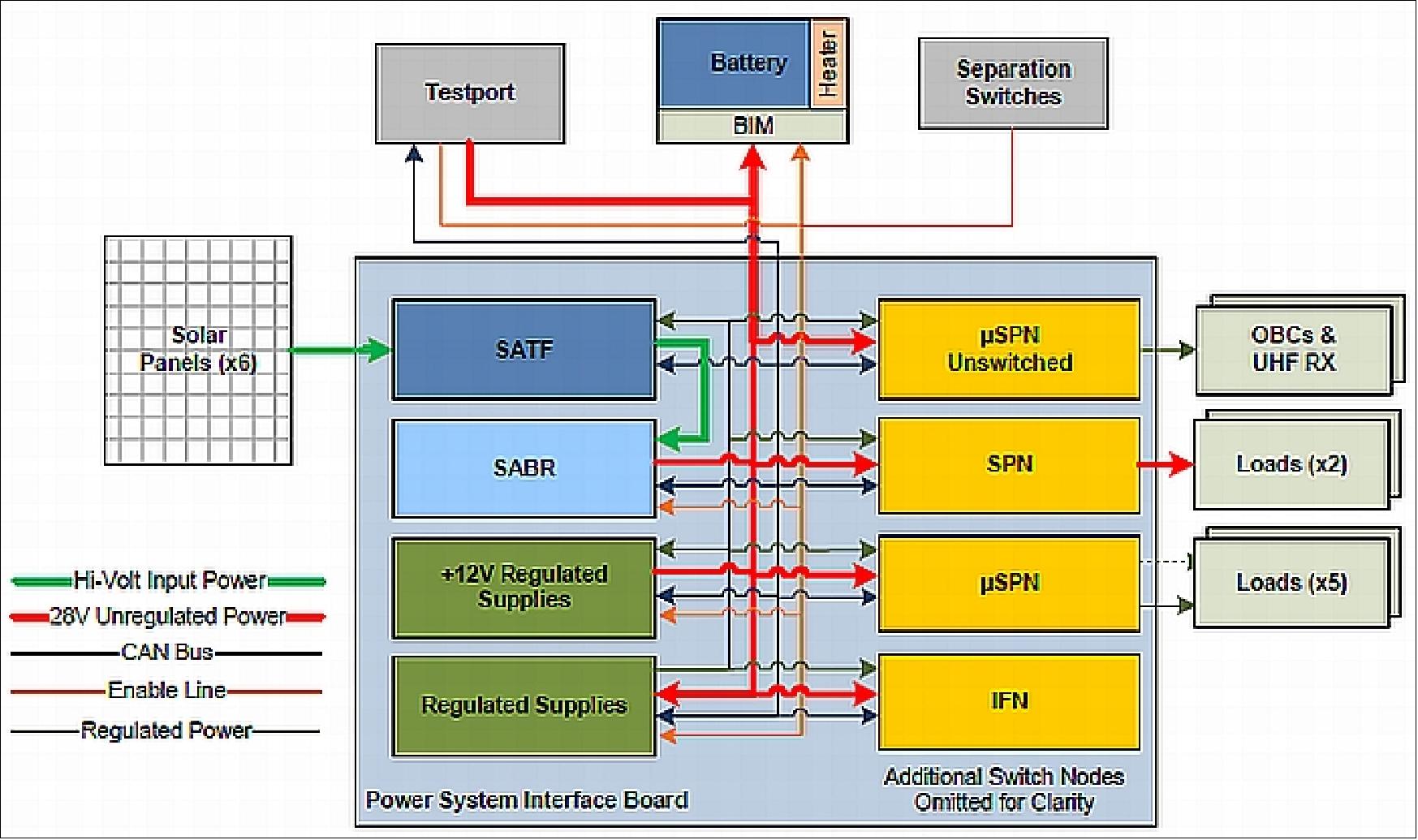
The MPS is built upon a central backplane, known as the POSIF (Power System InterFace) module, which distributes power and data to the various power cards. The power cards can either draw from or energize one of the multiple distributed power busses located on the POSIF. Each slot on the POSIF, the number of which can be sized for a specific mission, is identical. This flexibility allows the power modules to be located wherever they best facilitate the spacecraft's wiring and mechanical design. This further decouples the electrical and mechanical design, reducing serial dependencies in mission development.
The MPS is compatible with many different power system topologies. To date, the MPS has been deployed using a series PPT (Peak Power Tracking) with battery regulation for high power implementations, as well as a direct energy transfer with parallel peak power regulation for lower voltage applications.
In the series PPT implementation, power is stepped down from the solar arrays to the battery voltage using high efficiency DC/DC converters that provide both battery charge regulation and solar array peak power tracking. No battery discharge regulation is required which suits payloads with high power transients, and the low battery impedance contributes to power system stability. A block diagram overview of a generic MPS implementation is shown in Figure 4. This is the topology deployed on the MESR (Mars Exploration Science Rover) of CSA (Canadian Space Agency) and the NEMO-HD mission.
For missions that have short solar cell strings, where the nominal solar cell voltage overlaps the nominal operating voltage of the spacecraft, such as on a cubesat mission like CanX-7, the DET (Direct Energy Transfer) topology is more appropriate in terms of system efficiency. When using this topology, the MPS provides parallel regulation using a high efficiency BCDR (Battery Charge and Discharge Regulator ).
Modules
The functionality of the MPS is derived from specialized modules in the form of interchangeable cards. The functional elements of a typical power subsystem are localized on these modules, allowing the selection of either a few or many cards, allowing a system designer to exactly tailor the power subsystem of any given mission. For maximum flexibility, each of the power modules has been designed to act as a standalone functional element, and includes all telemetry gathering and command decoding. By compartmentalizing the functionality of the modules, each individual module can be developed and tested in isolation before integration into the subsystem at a later date. Cards that are not required for all phases of the mission can be selectively disabled to save power, allowing the modularity to be leveraged on orbit as well as during development.
The power modules themselves have been designed to cover typical functional requirements as generically as practical. The most common modules include a scalable solar array/battery regulator, generic DC power supplies, customizable switch power nodes, and a smart battery node. Each module is 50 mm x 55 mm in size with a mass of ~30-40 g.
SABR (Solar Array / Battery Regulator)
SABR (Figure 5) is a DC/DC convertor that regulates the solar arrays and the charging of the batteries. The SABR is a synchronous buck converter, configured to charge Li-Ion batteries between 5-34 V while accepting solar array voltages up to 65 V. Each SABR has a throughput of up to 180 W and operates at efficiencies above 95%.
Control feedback of the converter is accomplished through a hybrid scheme with a high-speed analog controller and a supervisory digital controller. The analog controller is responsible for battery regulation and system stability, the supervisory adjusts the maximum allowable duty cycle digitally, allowing the solar array voltage to be controlled, enabling peak power tracking. The microcontroller on the SABR can be loaded with a variety of peak power tracking algorithms, depending on the specific characteristics of the solar array. This dual control approach allows for fixed-point solar array operation, peak power tracking, and battery trickle-charging.
Since the SABR is a high efficiency, high bandwidth buck converter, additional SABRs can be added to the system to provide any regulated voltage rails required by other subsystems that are below the battery voltage. By leveraging the existing SABR design and software, additional voltage regulators can be added for low additional cost.
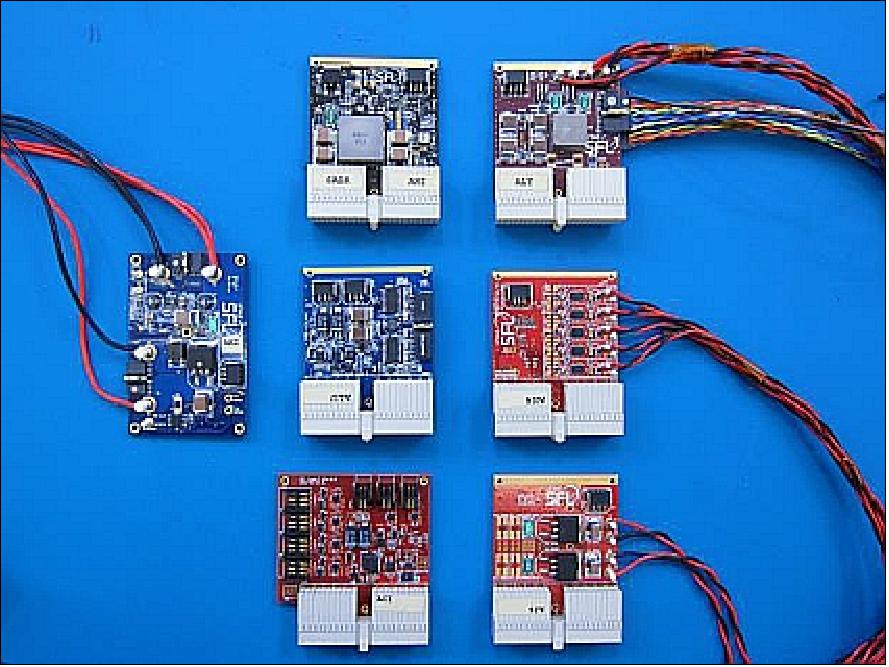
SPN (Switched Power Node)
The power distribution of the MPS is done by the Switched Power Nodes, SPNs, and µSPNs (micro Switched Power Nodes). These modules tie into the main voltage rails of the power subsystem (either regulated or unregulated), and distribute it to the spacecraft subsystems. Each switch card contains multiple solid-state switches with fault protection and telemetry, as well as a dedicated microcontroller for command and data handling. The SPN, shown in Figure 5, has two switches per card, capable of providing between 9V and 34V at 10A per switch. The µSPN, also shown in Figure 5, has five switches per card, capable of providing between 3.3V and 12V at up to 5A per switch. Every switch is equipped with soft-start behavior and software over-current functionality to protect the loads from transients as well as hardware over-current to protect the power system from critical faults such as short circuits.
Power switches on the SPN and µSPN can be configured as either a switched or unswitched load. Switched outputs will implement a latching overcurrent protection mechanism, which will trip off under overcurrent conditions and remain off until manually reset via a command from an operator. Conversely, unswitched outputs will implement a non-latching overcurrent protection mechanism, which will trip off under overcurrent conditions, but then attempt to reset autonomously. The latter variety of power switch is useful for loads that must be protected, but which should never be permitted to permanently turn off such as command receivers and housekeeping computers.
SAFT (Solar Array Telemetry and Filtering)
To decouple solar array sizing and configuration from the SABRs, the input filtering, muxing, and telemetering of the array is done on a separate SAFT module. Each SATF (Figure 5), comes with six telemetry channels for array current, voltage, and temperature, with a peak throughput of 20 A. The solar array can be scaled up by adding additional SATF modules to meet specific mission requirements. A filter is implemented to attenuate switching noise produced by the SABR from propagating back onto the solar arrays, which could produce unwanted RF emissions.
IFN (InterFace Node)
The MPS has been deployed in a variety of systems including nanosatellites, microsatellites and rovers. Each of these systems has special interface and mission-specific functional requirements. IFN provides a mission-specific interface. This mission/bus specific functionality and will typically be the only card that needs to be designed/modified from mission to mission. Functionality that typically appears on the IFN includes hardware decoded command handling, system reset functionality, temperature monitoring, protection features and translation of the physical layer for communications interfaces.
In addition, these mission specific IFNs can carry additional functionality tailored to its mission. As an example, the NEMO-HD IFN was equipped with the electronics to drive various mechanisms involved in the payload. The flexibility of the MPS has allowed for these systems to be placed in the power system to the benefit of the mechanical layout without introducing the risk of late stage modifications to the entire power system as the payload development matures. Instead the IFN alone is coupled to the payload.
In the case of CanX-7, the IFN includes low power versions of the solar array inputs and a DC/DC convertor to provide a regulated voltage rail used by some subsystems. This replaces the need for a SATF and a SABR configured as a DC/DC convertor, shrinking the size of the power system to fit into the constrained triple cube form factor.
BIM (Battery Interface Module)
The BIM sits between the battery and the main power bus to provide battery protection and monitoring. The BIM is integrated directly with the battery pack converting it into a smart node capable of collecting its own telemetry and operating independently, similar to the other cards in the system. To accommodate the range of power levels handled by the MPS, the BIM has been designed for a range of Li-Ion battery packs from 34 V down to 9 V, while allowing up to 40 A of discharge current. The BIM provides over discharge and over current protection while continually monitoring the capacity and health of the battery. Since the BIM is an integral part of the battery, the telemetry and protection features are always available during handling and isolated testing.
BCDR (Battery Charge and Discharge Regulator)
The BCDR provides the parallel regulation and peak power tracking for the direct energy transfer topology variant. The BCDR replaces the BIM when used, and like the BIM, the BCDR is integrated directly with the battery, and provides thermal monitoring and control. In addition to the battery protection features of the BIM, the BCDR also has a bi directional Boost-Buck convertor which can regulate the main bus voltage to 3.2 V-5.5 V in order to regulate the charging or discharging of the battery. The BCDR is designed for a single Li-Ion cell at 3.4-4.2 V, and is capable of providing 7 A of discharge current.
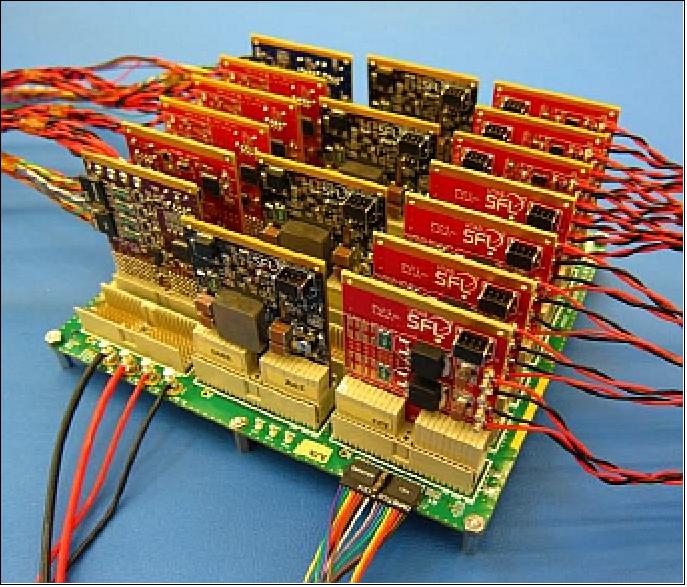
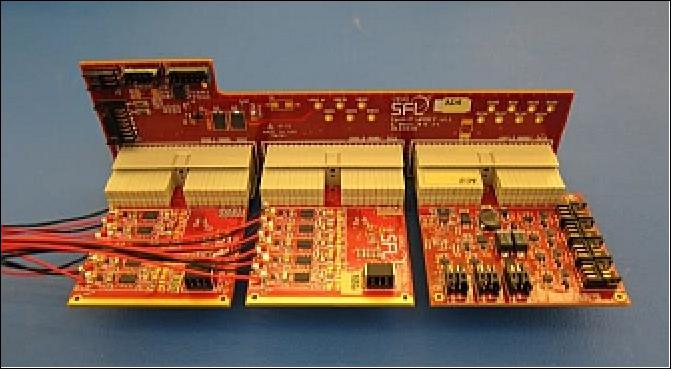
Module integration
The backbone of the MPS is a passive backplane that interconnects the modular cards that compose the power system without the complexity of a spliced wiring harness. The backplane consists of a multi-layered PCB with board-mounted connectors that mechanically support each card and provide electrical interconnection ( Figure 6). Each connector interface is generic and identical supporting any combination of cards (SABRs, SPNs, DC/DC converters, etc.) as required for a particular mission.
The backplane routes all common electrical interfaces to each card including unregulated and regulated power rails, solar power, analog/digital I/O, and the communications interface. Special jumpers located in the backplane can be used to connect a card to any of the common I/O lines for control or telemetry.
Each connector interface has dedicated pins that assign the attached card a unique address used for identification purposes. The software loaded onto each class of card is identical and includes a configuration file that is loaded when the card in inserted into the backplane. This has the advantage of making software upgrades generic and replacement of failed units can be performed without pre-configuration.
The size of the backplane and number of modular interfaces is typically customized for a particular class of mission. The power plane copper thickness of the backplane PCB (Printed Circuit Board) can be increased for high power applications or reduced in order to save mass. Typically several spare generic interfaces are included to permit last minute upgrades to the power system if needed.
Command and telemetry
Each modular card in the MPS includes a dedicated microcontroller and can be considered a smart node. All commands and telemetry handling is distributed, with each card responsible for managing its own functionality, telemetry and command interface. The software running on each unit consists of a common executive which performs command handling and memory management and an application which provides unit specific functionality.
The physical communications interface typically consists of a CAN (Controller Area Network) bus, although I2C and UART(Universal Asynchronous Receiver/Transmitter) interfaces are also available on spacecraft that do not support CAN. CAN is ideally suited for this type of distributed architecture as it has support for multiple masters with a hardware arbitration scheme based on carrier sense multiple access with bitwise arbitration (CSMA/BA). Each card is one node on the multi-drop Bus and can be addressed with a global broadcast, device type broadcast, or unit specific address.
All communications with the MPS use the NSP (NanoSatellite Protocol) developed by SFL and used on all SFL missions. This is the same protocol used for the ground to spacecraft link and all intra-satellite communications. Use of this standard protocol permits the power system to be seamlessly integrated with any SFL bus and to take advantage of existing NSP command and telemetry terminals.
Applications
As of summer 2013, the MPS has been deployed in five very different applications. The scalability of this modular approach is emphasized by the fact, that these missions ranged in output power from 5 W to 1.3 kW and bus sizes from as small as a carton of milk to as large as a golf cart. While the size and capabilities of these systems varied extensively, they all had the same basic requirements: to provide switched power, fault protection, battery charge management and solar array peak power tracking.
In addition, the NEMO platform has been specifically enhanced to include a high-output power system and a higher capacity battery. The main solar arrays use 15-cell strings, while a keep-alive solar array uses 7-cell strings. Triple junction solar cells (28% efficiency) are used on all arrays. The main solar arrays operate between 30 V to 45 V. The battery pack comprises 7-cell Li-ion in the 7s1p configuration, providing 130 Wh of energy storage with a voltage range of 25-28 V. The power to high-energy devices such as the instrument and the X-band transmitter are distributed through a high-voltage bus that operates between 25-28 V. The power to the lower-voltage avionics are distributed through a 5 V regulated bus.
Communications between the various avionics modules are performed via I2C, SPI, asynchronous TTL serial, asynchronous RS-485/422 serial and CAN buses. Discrete input/output lines as well as analog telemetry lines are also used. High speed data lines between the detector modules and the data recorder uses GigE (Gigabit Ethernet), while the high-speed data transmission line to the X-band transmitter uses synchronous LVDS (Low Voltage Differential Signal).
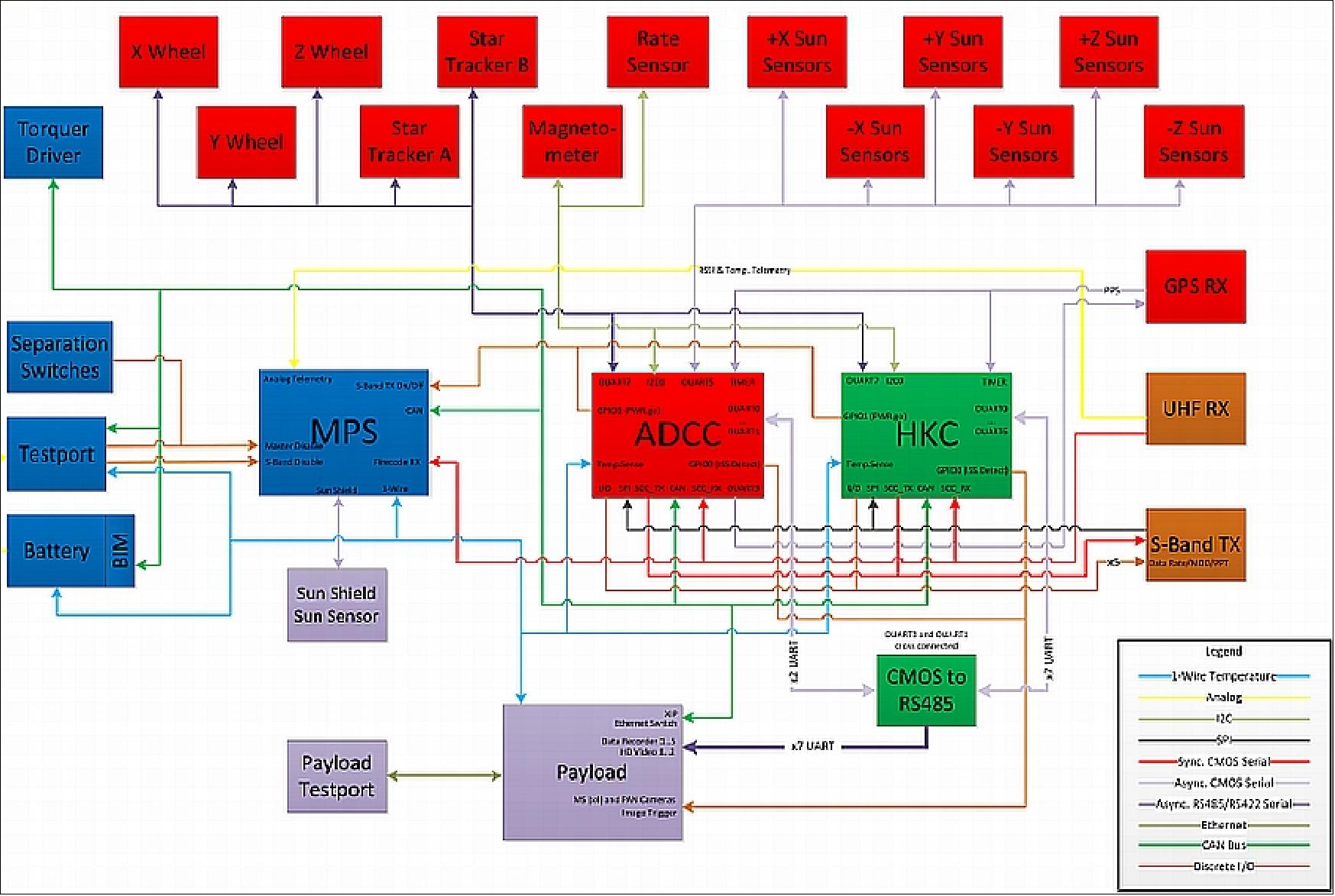
ADCS (Attitude Determination and Control Subsystem)
The spacecraft is 3-axis stabilized. ADCS is performed by a set of sensors and actuators, with computation performed by an ADCC (Attitude Determination and Control Computer).This implementation builds upon the know-how from missions such as BRITE and NEMO-AM. NEMO-HD adds a second star-tracker to the ADCS in order to improve the pointing accuracy and to minimize the impact of the sun exclusion zone on the imaging operations. NEMO-HD is expected to achieve a pointing accuracy of 1.5 arcmin. With the instrument pointing towards nadir from the reference orbit, this pointing accuracy translates to approximately 260 m pointing accuracy on the ground.
The spacecraft is equipped with a variety of sensors providing both coarse and fine attitude determination accuracy throughout the operational phases of the mission. The coarse sensors are: a three axis magnetometer, six fine sun sensors, and a three-axis rate sensor. Two star trackers provide the precise attitude information. - The coarse sensors have the attitude determination accuracy (1σ) of roughly 2.8º , while the two star trackers enable the accuracy of 15 arcseconds. One three-axis MEMS rate sensor with a nominal accuracy of about 0.1º/s is also provided. Three reaction wheels with a maximum torque output of about 5 mNm are used to actuate the spacecraft.
Besides standard modes of the ADCS, such as safe, passive, detumble, sun pointing, data download (nadir-tracking), remote imaging, and real-time imaging, that cover all expected operational cases, also an experimental mode is foreseen. In this mode, the operation team selects the desired Earth-observation spot manually and defines it as the reference spot for the control algorithm. There will be two possibilities of the experimental mode application: 11)
• Off-line mode, where there is no direct contact between the ground station and the satellite
• On line real-time, where the contact between the ground station and the satellite is established.
1) ROMA (Real-time Online Mode of ADCS)
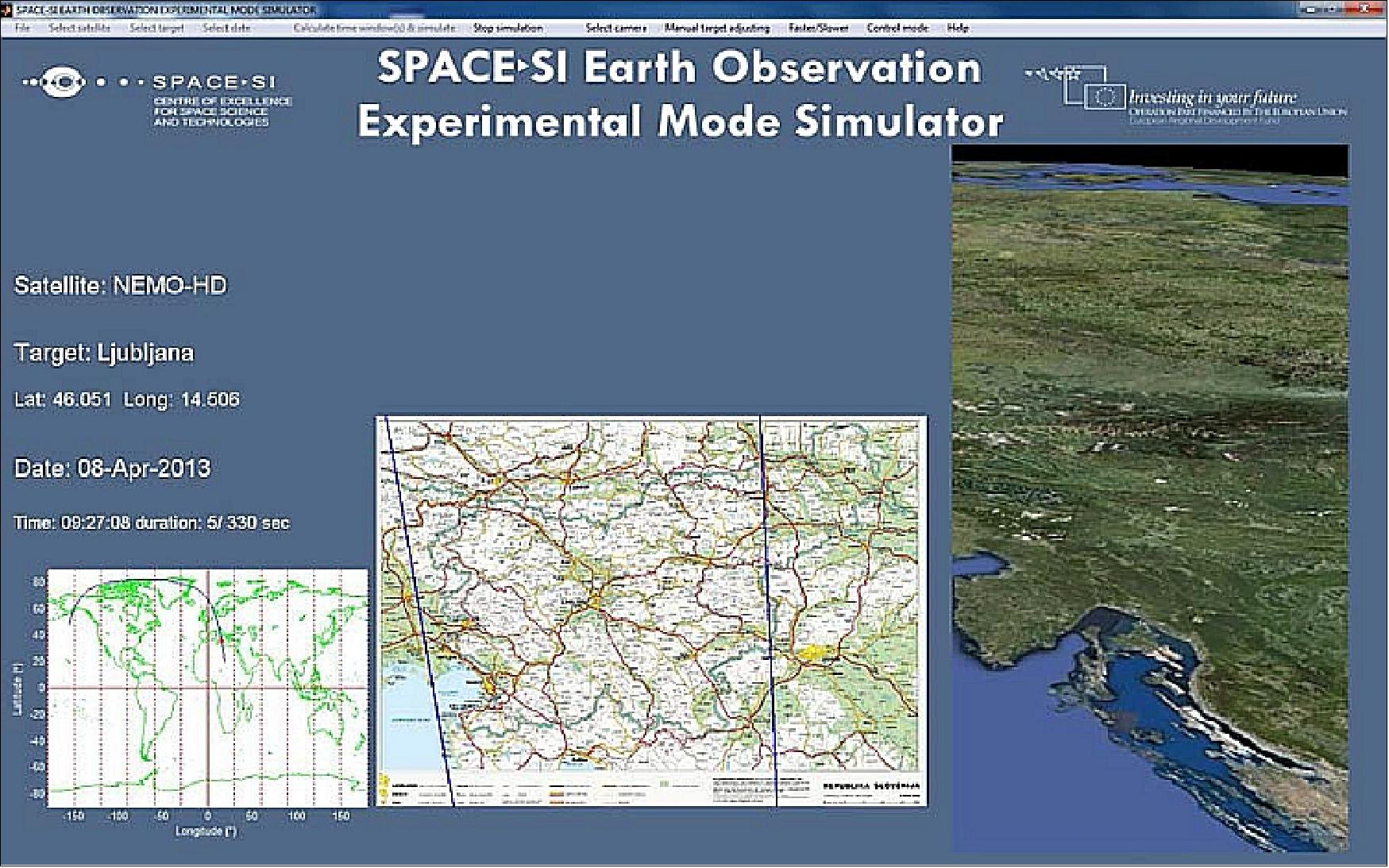
In the ROMA scenario, the desired scenario is uploaded right after the satellite to ground station contact is established. There are two possible target types: A fixed target and a path tracking target. The Nemo-HD satellite is equipped with two cameras: a primary camera with 10.8 km swath, and a secondary camera with a swath of 70 km. Both payloads are HD video capable.
Both payloads are HD video capable. Figure 9 shows the simulated secondary payload image of Ljubljana as the target in the very beginning phase of established contact (70º tilt). The satellite trajectory is depicted on the left side of the picture, the map of surveillance area in the middle, and the image (in the simulation obtained by Google Earth) on the right. Due to the very high tilt and the vertical orientation of the image sensor (140 km field of view at nadir), the part of Europe stretching from the Croatian coast in the front to North Sea in the back can be seen. The vertical lines in the middle part of Figure 9 indicate the swath, which is due to the large distance, is much wider than 70 km.
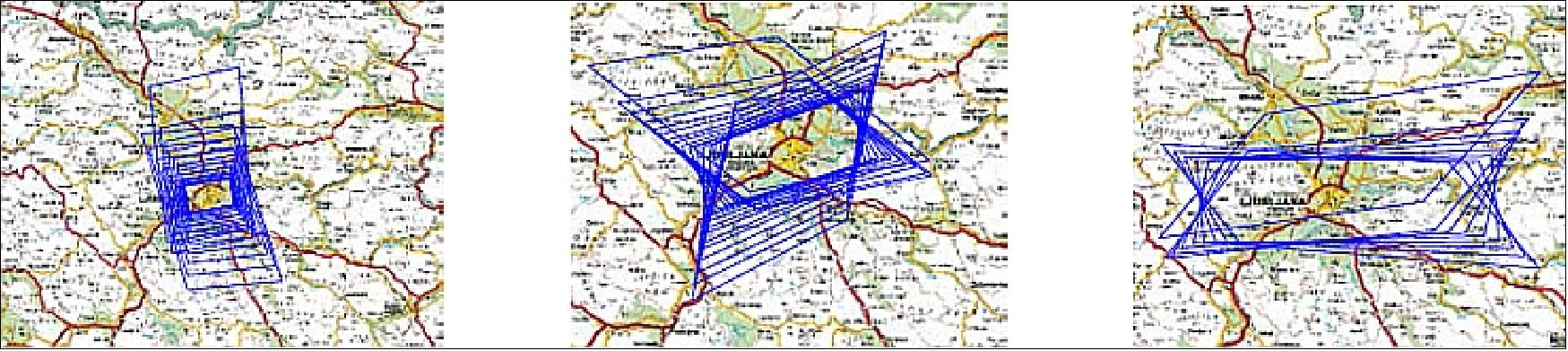
More detailed snapshots are obtained with NEMO's primary payload camera. However, due to the changing perspective, the surveillance area is changing its shape, as depicted in Figure 10. In the left part of the figure, the case is shown where the target (Ljubljana in this case) lies close to nadir. For clarity reasons, only one frame within a period of 15 s is shown. The middle and right parts of Figure 10 show stretched surveillance areas due to high tilt. This is the case when there are two observation windows within two consecutive orbits, depicted in Figure 11.
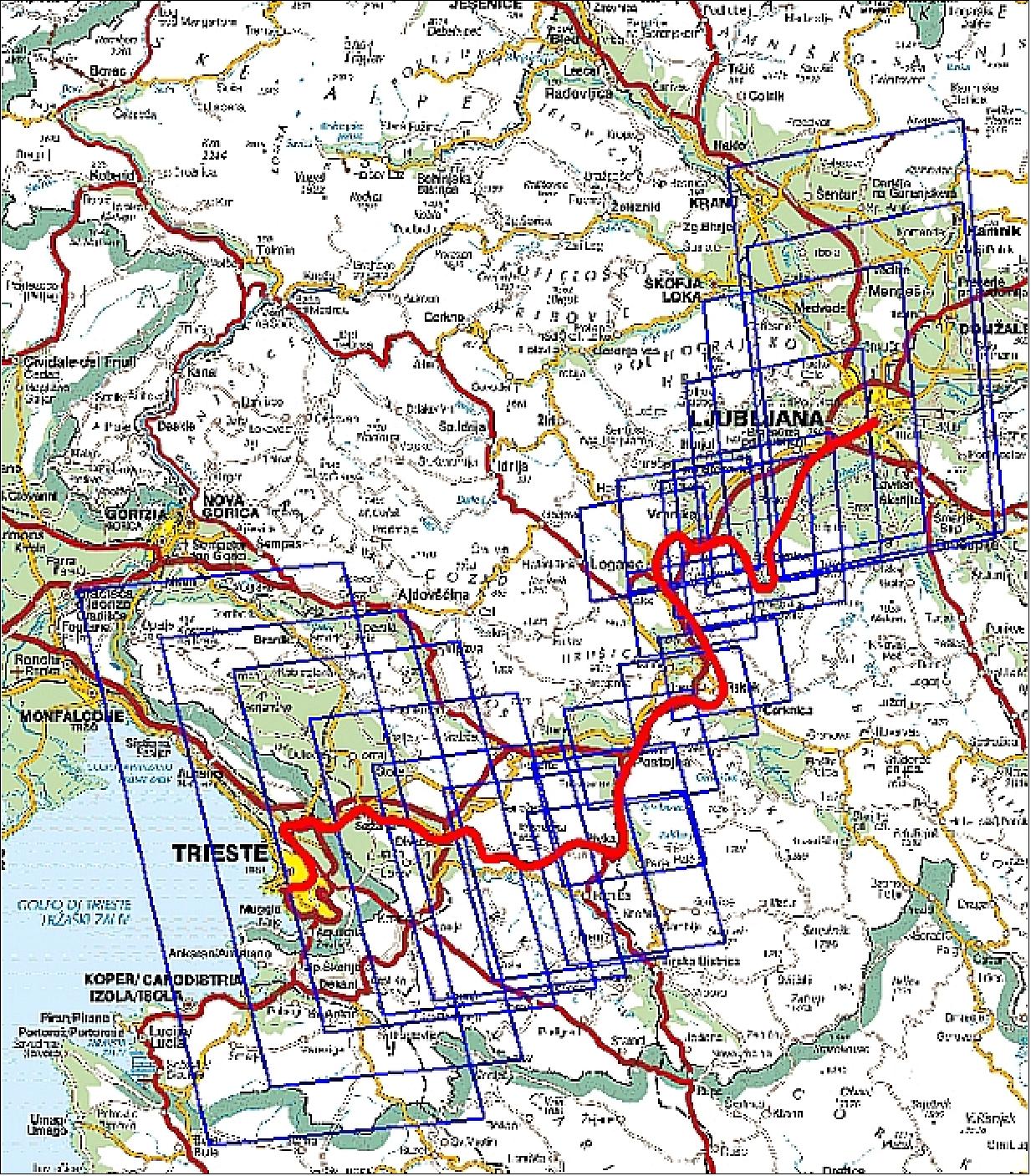
Path tracking observation/surveillance in real-time: A further possibility of the experimental ROMA (Real-time Online Mode of ADCS) is to define a path tracking target. Figure 12 shows the case for the Ljubljana-Trieste historical railway as target. The frames (one within every 15 seconds for clarity reasons) depict the surveillance areas. It can be seen that in the beginning and the end of the observation sequence, the frames are stretched due to the longer distance and higher tilt.
2) VBAC (Visual Based Attitude Control)
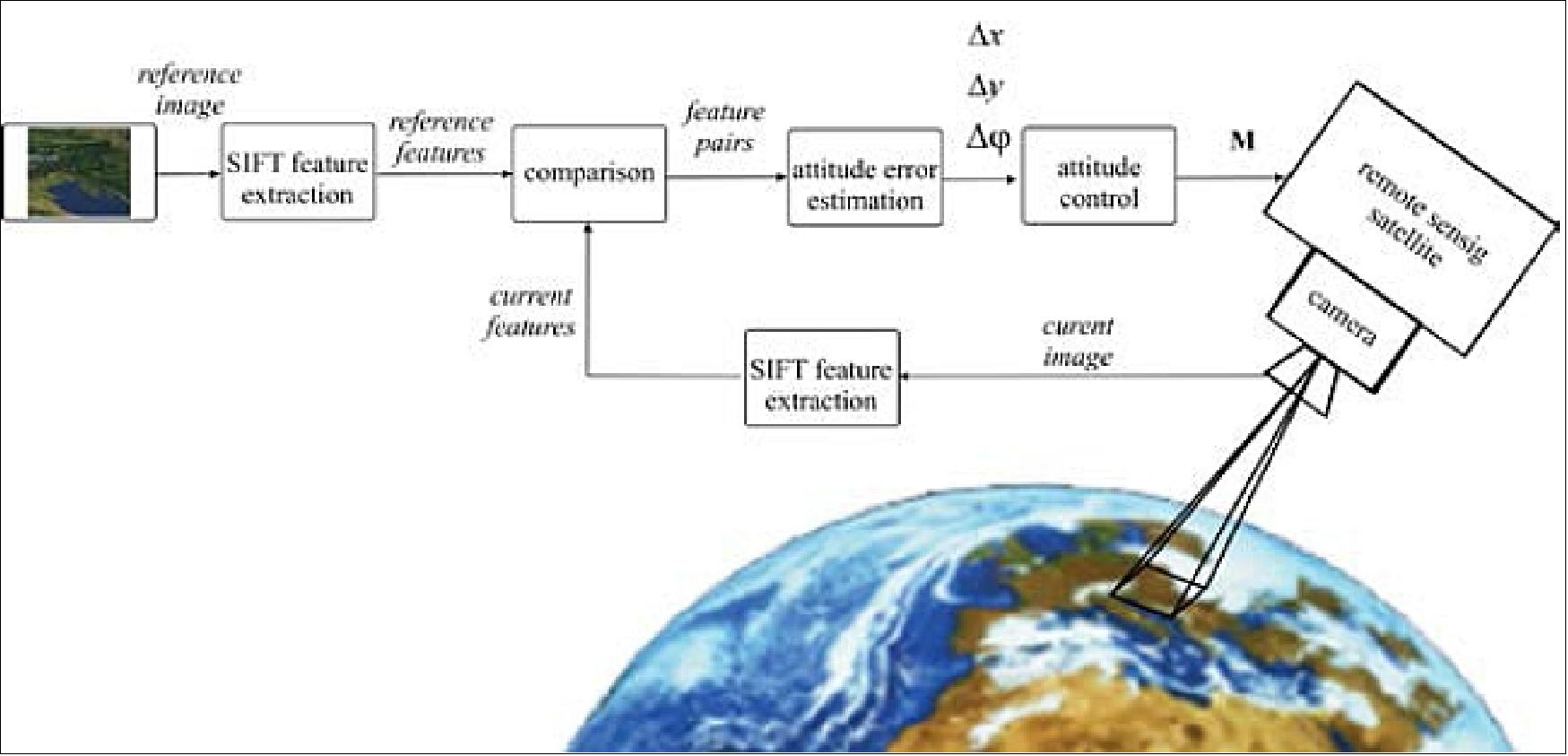
The VBAC idea that the image of the reference spot is the reference for the image-based control algorithm. 12) The feature extraction algorithm, which is capable of finding distinctive key-points, that are invariant to location, scale and rotation, and robust to affine transformations (changes in scale, rotation, shear, and position) and changes in illumination, is applied to the reference image yielding reference feature positions. SIFT (Scale Invariant Feature Transform) features is used for features extraction. The same algorithm is then applied in every control step to the current image. The positions of the extracted features are used by a control algorithm to generate a control signal with the goal to place the object into the reference position. The applied control algorithm, shown in Figures 13 and 14 , is an IBVS (Image Based Visual Servoing) algorithm, which integrates the kinematics and dynamics of visual information into the dynamic process of the controlled moving object. In this case the controlled variable is no longer the actual position/orientation of the controlled object – of the satellite, but rather the values of image signals and their derivatives. The desired position/orientation is now defined in the image space rather than in the geometrical space.
Such a sophisticated algorithm is hard to implement on an on-board computer of a microsatellite; hence, it is planned to run on-ground. This mode of proceeding, however, involves several challenges, among them the most critical are the time delays associated with the on-board processing of the video images, transmission of the data to the ground and return of commands to the spacecraft, and processing of the algorithms on-ground.
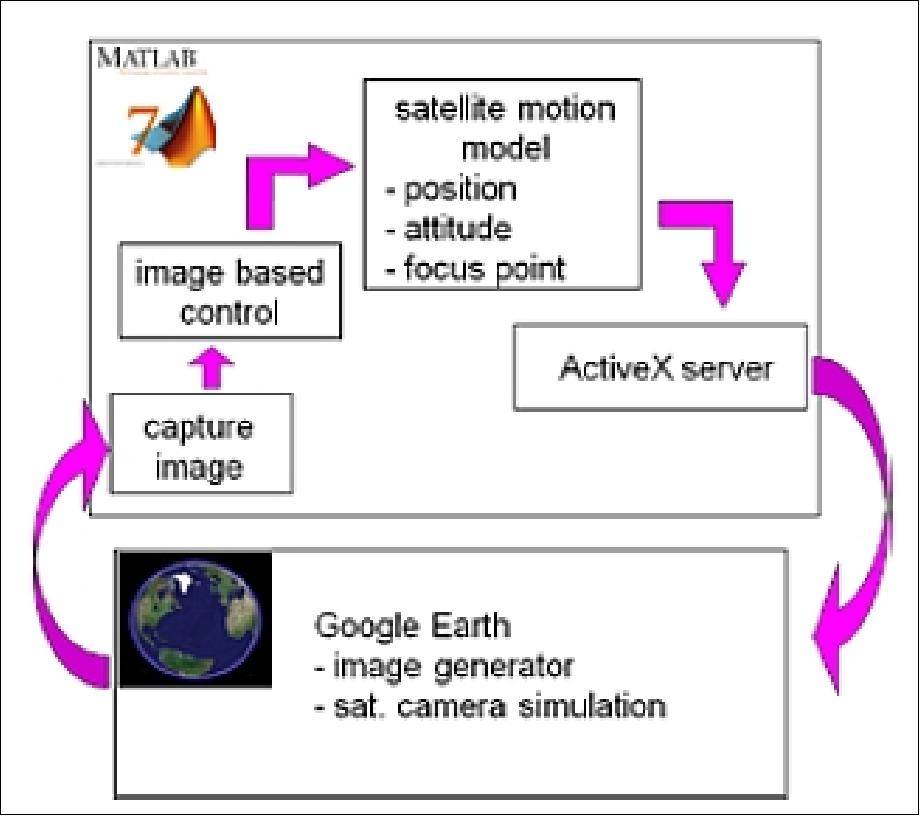
In the simulation study, represented in Figure 14, the SGP model and the Google Earth application, that provides camera images, are used to provide appropriate images. Google Earth is used as an Earth surface image generator and simulates the satellite camera. The application has to be controlled from Matlab to reproduce the satellite's camera view of the Earth's surface for a calculated satellite position and orientation. To achieve this, Matlab connects to the ActiveX server interface of the Google Earth, and then uses a part of available properties and methods. Among others, the interface to the camera is available, which can be used to set the focus point as well as the range, tilt and azimuth of the camera. These properties are repeatedly set to match the desired focus point and satellite position during the simulation experiment.
In this work, SIFT features were calculated using toolbox, 13) where each feature is represented by a descriptor vector with 128 elements and by a 4-element location vector. Each feature is described with the location vector defined by row and column image coordinates, scale (vector size) and orientation. For each sample time (defined by the camera frame rate and time needed for calculations – 1 s was chosen in the study – this is the sampling time of the NEMO classical control loop using star trackers which enforce this sampling time), the current image features are matched to the reference image features so that each found pair of features represents the same point on the Earth's surface. To reduce the influence of changing perspective, the current image in every step becomes the reference image, while the errors accumulate.
The pairs are found by searching the feature space (descriptor); for each feature in the current image a pair from the reference image is found by searching for a minimal distance between them. To meet the desired satellite orientation (attitude) the appropriate moments around the satellite body frame axes are calculated, depending on the orientation errors. These orientation errors are estimated from the feature pairs found between the reference and the current image. The orientation errors are calculated in the camera frame (x axis to the right of the picture, y axis up, negative z axis towards the target), which has a fixed orientation towards the body frame. The errors in x and y positions (estimated image translation to match the features) of the paired features reflect in the pitch (turn around y axis) and roll (turn around x axis) errors (expressed in the camera frame), while the yaw is related to the rotation of the current image relative to the reference image. The conversion factor between pixels (in which the errors in x and y positions are expressed) and the desired rotation angles (in classical control provided by the attitude estimation algorithm), varies due to changes in the perspective. For simplicity a fixed conversion factor, which corresponds to the nadir target position, was chosen. The consequence of this simplification is that the gains of the controller (which calculates the applied torques from desired rotational angles) vary slightly.
In both modes of real-time target observation/surveillance [i.e. in 1) and in 2)], the accurate star trackers will be used; however, in the on line real-time mode (ROMA), also an experiment will be performed, where only coarse attitude sensors, combined with visual based attitude control, will be utilized. The goal of this experiment is to test whether expensive star trackers can be avoided in cost effective missions.
Power budget
The current power system design has been sized for imaging operations over Slovenia during the daytime passes. Data download will occur during all six passes. The spacecraft will recharge during the remainder of the orbit. In this case, the maximum power generation required will be approximately 31 W, while the peak power consumed is approximately 88 W.
RF communications
Command uplink in the UHF band and health and telemetry downlink in the S-band will implement systems that are similar to what are currently being used on other SFL missions. The UHF uplink at 401-403 MHz space operations band assumes a 23 dB Yagi antenna system on the ground station and maintains a link margin of 7 dB. The telemetry S-band downlink at 2200 MHz space research band assumes a 5 m dish on the ground station and maintains a link margin of 11 dB.
The payload data (still images and real-time video streams) is downlinked in X-band at a rate of 50 Mbit/s. The onboard storage capacity is 280 GB. Ethernet was selected for interconnecting each of the payload channels to the high-speed downlink radio for a number of reasons. Primarily, it naturally lends itself for use in point-to-multi-point network topologies as implemented in NEMO-HD. Secondly, Ethernet was readily available on the components interfacing with the downlink subsystem, namely the five frame grabbers, and two video encoding units. Aside from the downlink transmitter itself, the high-speed downlink subsystem performs two important roles: multiplexing seven individual data streams into one, and interfacing the resultant output to the radio transmitter by applying the required data encoding and performing conversion of physical layers.
The RTSP (Real Time Streaming Protocol) and H.264 video compression code are used in conjunction to encode and transmit live video streams from the primary and secondary video channels on NEMO-HD to the ground station.
Spacecraft mass, size | 72 kg, 600 mm x 600 mm x 300 mm |
Spacecraft power | 31 W required, 55 W (peak power production), 300 Wh Li-ion battery |
Spacecraft stabilization | - Three-axis stabilized NEMO bus |
RF communications | - UHF command uplink |
Launch
The microsatellite NEMO-HD was launched as a passenger payload at 01:51 UTC, 03:51 CEST on 3 September, 2020 (22:51 local time on 2 September in Kourou).The launch vehicle was the VEGA SSMS (Small Spacecraft Mission Service) Proof Of Concept flight. 14)
Orbit
Sun-synchronous orbit; target orbit for the 7 microsatellites: altitude of 515 km, inclination of 97.45º; target orbit for the 46 nanosatellites: altitude of 530 km, inclination = 97.51º. The nominal mission duration (from liftoff to separation of the 53 satellites) is: 1 hour, 44 minutes and 56 seconds.
Passenger Payloads (53) of the Vega Rideshare Mission
Arianespace has realized the first European "rideshare" mission for small satellites, with 53 satellites onboard the Vega launcher for 21 customers from 13 different countries. With this new SSMS (Small Spacecraft Mission Service) shared launch concept, Arianespace demonstrates its ability to respond – in an innovative and competitive manner – to institutional and commercial requirements of the growing market for small satellites. The total satellite launch mass was 1,327 kg. 15)
With the demonstration of its new SSMS service, Arianespace is strengthening its position in the growing market for small satellites. This service will soon be supplemented by the MLS (Multi Launch Service) – a similar offer available on Ariane 6, allowing Arianespace to increase the number of affordable launch opportunities for small satellites and constellations.
• ESAIL is a maritime microsatellite with a mass of 112 kg for AIS (Automatic Identification System) ship tracking operated by exactEarth. Is was built by a European manufacturing team led by the satellite prime contractor Luxspace. ESAIL features an enhanced multiple antenna-receiver configuration for global detection of AIS messages and high-resolution spectrum capture, which will enable the demonstration of advanced future services such as VDES (VHF Data Exchange System) message reception. 16)
• Lemur-2, eight 3U CubeSats built by Spire Global Inc., San Francisco, CA . These satellites carry two payloads for meteorology and ship traffic tracking. The payloads are: STRATOS GPS radio occultation payload and the SENSE AIS payload.
• TriSat is a 3U CubeSat (5 kg) imaging mission led by the University of Maribor, Slovenia. The mission is focused on remote sensing by incorporating a miniaturized multispectral optical payload as the primary instrument, providing affordable multispectral Earth observation in up to 20 non-overlapping bands in NIR-SWIR (Near to Short Wave Infrared) spectrum.
• The launch integrator company Spaceflight Inc. of Seattle WA is providing its services for four different customers with a total of 28 satellites. These are:
a) NewSat-6 (also written as ÑuSat-6), is a low Earth orbit commercial remote sensing microsatellite (43.5 kg) designed and manufactured by Satellogic S.A. with HQs in Argentina, a vertically integrated geospatial analytics company that is building the first Earth observation platform with the ability to remap the entire planet at both high-frequency and high-resolution. This is Satellogic's 11th spacecraft in orbit, equipped with multispectral and hyperspectral imaging capabilities and it will be added to the company's growing satellite constellation. —
The spacecraft is named "Hypatia" after the philosopher, astronomer, and mathematician (350-415 A.D.) who lived in Alexandria, Egypt, and was a symbol of learning and science. She was renowned in her own lifetime as a great teacher and a wise counselor and became seen as an icon for women's rights and a precursor to the feminist movement. In line with Satellogic's NewSats already in orbit, Hypatia is equipped with sub-meter multispectral and 30 m hyperspectral cameras. This NewSat Mark IV is also equipped with new technologies in service of Satellogic's research and development of Earth-observation capabilities. Upon successful commissioning, these new capabilities will be available to existing Satellogic customers.
b) 14 Flock-4v, 3U CubeSats, next-generation SuperDove satellites of Planet Inc., San Francisco, they will join its constellation of 150 Earth-imaging spacecraft.
c) SpaceBEE, 12 (.25U) picosatellites of Swarm Technology which provide affordable global connectivity.
d) Tyvak-0171, an undisclosed minisatellite of Tyvak, developed by Maxar with a mass of 138 kg.
• Planet Inc. of San Francisco launches a total of 26 Flock 4v SuperDoves on this mission. They will be split into two batches on the same launch: 14 of them will be housed inside and deployed from ISL's QuadPack deployers and the remaining 12 will be deployed from D-Orbit's InOrbit Now (ION) freeflying deployment platform. 17)
• Athena, a communications minisatellite mission (138 kg) of PointView Tech LLC, a subsidiary of Facebook. The objective is to provide broadband access (internet connectivity) to unserved and underserved areas throughout the world.
• AMICalSat, a 2U CubeSat, an educational mission, developed by CSUG (University of Grenoble Alpes, France) and MSU-SINP (Lomonosov Moscow State University-Skobeltsyn Institute of Nuclear Physics, Russia). The objective is to take pictures of the Northern light in order to reconstruct the particle precipitation into the polar atmosphere. The payload is a very compact, ultra-sensitive wide filed imager (f=23mm, aperture f/1.4). Firstly, AMICal Sat will observe auroras using nadir pointing, i.e. by determining the center of the Earth to map and link the geographical position of the auroral oval and its internal structures with solar activity. Secondly, the CubeSat will perform image capture ‘in limbo' through tangential orientation with the Earth to capture the vertical profile of the auroras and match an altitude to their various emissions.
• PICASSO, a 3U CubeSat mission (mass of 3.8 kg) developed for ESA ( European Space Agency) led by BISA (Belgian Institute for Space Aeronomy), in collaboration with VTT Technical Research Center of Finland Ltd, Clyde Space Ltd. (UK) and the CSL (Centre Spatial de Liège), Belgium. The goal is to develop and operate a scientific 3U CubeSat.
• GHGSat-C1 of GHGSat Inc., Montreal, Canada, is the first of two nanosatellites (~16 kg) as the commercial follow-on to the GHGSat-D (CLAIRE) demonstration satellite developed and launched by UTIAS/SFL of Toronto in 2016. GHGSat monitors industries greenhouse gas (GHG) and air quality gas (AQG) emissions, including: oil & gas, power generation, mining, pulp & paper, pipelines (natural gas), landfill, chemicals, metals & aluminum, cement, agriculture, and transportation.
• NEMO-HD of SPACE-SI (Slovenian Center of Excellence for Space Sciences and Technologies) is a microsatellite (65 kg) developed at UTIAS/SFL of Toronto, Canada in cooperation with SPACE-SI. The NEMO-HD (Next-generation Earth Monitoring and Observation-High Definition) satellite is a high precision interactive remote sensing mission for acquiring multispectral images and real time HD video.
• FSSCat (Federated Satellite Systems on Cat) is the winner of the 2017 Copernicus Master "ESA Sentinel Small Satellite Challenge (S3)". Proposed by the Universitat Politèctica de Catalunya (UPC) and developed by a consortium composed of UPC (ES), Deimos Engenharia (PT), Golbriak Space (EE), COSINE (NL) and Tyvak International (IT).
• Phi-Sat-1 (Φ-Sat-1) is the first on-board ESA initiative (6U CubeSat) on Artificial Intelligence (AI) promoted by the Φ Department of the Earth Observation Directorate and implemented as an enhancement of the FSSCat mission. Among mission objectives, scientific goals are Polar Ice and Snow monitoring, soil moisture monitoring, terrain classification and terrain change detection (i.e. hazard detection and monitoring, water quality), while technological goals are optical Inter-Satellite Link (OISL) demonstration.
• The RTAFSAT-1 (Royal Thai Air Force Satellite-1) mission, also referred to as NAPA-1, is a 6U CubeSat, the first remote sensing CubeSat mission for Thailand. The satellite will carry out an Earth Observation Demonstration mission with SCS Gecko Camera and Simera TriScape-100 payloads; the designed lifetime is 3 years.
• DIDO-3, a commercial 3U CubeSat mission of SpacePharma. The objective is to gather data by researching the effects of a microgravity environment on biological materials. SpacePharma from Israel will be is on board of SSMS POC with DIDO-3 Nanosatellite to perform biological experiment under Microgravity for several customers involved in pharmaceutical business, supported by Italian Space Agency (ASI) and Israeli Space Agency (ISA). Dido-3 will be monitored from the Ground Station developed by SpacePharma in Switzerland.
• SIMBA (Sun-Earth Imbalance), a 3U CubeSat mission led by the Royal Meteorological Institute Belgium, The objective is to measure the TSI (Total Solar Irradiance) and Earth Radiation Budget climate variables with a miniaturized radiometer instrument. This mission will help in the study of the global warming. This science mission will have a design lifetime of 3 years and the satellite performances will be monitored from ground station located in The Netherlands.
• TARS-1, a 6U CubeSat of Kepler Communications, developed at ÅAC Clyde Space for IoT (Internet of Things) applications. TARS-1 features deployable solar arrays, software defined radios (SDR), a narrowband communications payload and high gain antennas.
• OSM-1 Cicero, the first nanosatellite developed in Monaco by OSM (Orbital Solutions Monaco engineers, a 6U CubeSat with a mass of ~10 kg) based on the Tyvak Nano-Satellite Systems design. OSM plans to build nanosatellites to gather environment and climate data.
• TTU100, a 1U CubeSat developed at the Tallin University of Technology, Estonia. The objective is to test earth observation cameras and high-speed X-band communications. It will perform remote sensing in the visible and IR electromagnetic spectrum.
• UPMSat-2 (Universidad Politecnica de Madrid Satellite-2), a demonstration microsatellite (45 kg) of IRD-UPM.
Mission Status
• August 2021: The ADCS (Attitude Determination and Control System) is presented and the performance of three different operating modes, inertial pointing, nadir pointing, and ground target tracking is shown. The pointing results show that the NEMO-HD spacecraft is easily achieving its pointing requirements of 120 arcsec (2σ) in the yaw and pitch axes, and 1000 arcsec (2σ) about the roll axis). Performance varied from 6 – 83 arcsec depending on certain observational complications such reaction wheel zero crossings which we not carefully planned in preparation for the demonstrations. Without zero crossings and availability of both star trackers, both of which can be planned for during regular operations, performance of better than 10 arcsecs during the observation periods has been demonstrably achieved. 18)
• February 8, 2021: Space-SI, the Slovenian Centre of Excellence for Space Sciences and Technologies, released the first multispectral image captured by its NEMO-HD Earth observation microsatellite just 16 days after launch. Built by Space Flight Laboratory (SFL) in collaboration with SPACE-SI, NEMO-HD is Slovenia's first microsatellite carrying a multispectral high-definition Earth observation instrument. 19)
- "SFL congratulates Slovenia on this auspicious first step toward building a robust national space program," said SFL Director, Dr. Robert E. Zee. "NEMO-HD represents a breakthrough in next-generation, compact microsatellite missions, and pushes the envelope of what can be accomplished by a small microsatellite in Earth observation."
- "NEMO-HD is enabling a new Earth observation concept by combining multispectral and video imaging from space. This can be controlled interactively in real time if needed when NEMO-HD is flying in the range of a ground station," said Prof. Tomaž Rodič, CEO of SPACE- SI. "With NEMO-HD successfully in orbit, we have achieved a very innovative and cost-effective remote sensing system which combines the agile microsatellite with our transportable ground station system, STREAM, and the advanced EO data processing chain, STORM."
- The Slovenia satellite was built on SFL's NAUTILUS microsatellite bus, which is an augmentation of SFL's NEMO bus that has been used for numerous successful microspace missions. With a mass of only 65 kg and dimensions of 60x60x30 centimeters, NEMO-HD captures multispectral (RGB/NIR) images that can be sharpened by a panchromatic channel to 2.8-meter resolution.
- The satellite also collects high-definition video at 25 frames per second. The main instrument can be operated in real-time imaging mode, allowing an operator at mission control on the ground to view the video feed as it is captured. If an event or feature of interest is spotted, a command can be sent to the satellite to collect a still image of the area.
- Imagery and video data acquired by NEMO-HD will be used to monitor agriculture, forestry, urban development, and marine transport, according to Space-SI. NEMO-HD acquired its first historic multispectral image over Eastern Slovenia on September 18, 2020.
- "SFL's ability to develop compact spacecraft with space-proven attitude control and precise pointing technologies at relatively low cost was a major factor in delivering a successful NEMO-HD satellite," said Zee. "These are critical technical requirements for successful collection of high-quality Earth observation data with microspace platforms."

- SFL is a unique microspace provider that offers a complete suite of nano-, micro- and small satellites – including high-performance, low-cost CubeSats – that satisfy the needs of a broad range of mission types from 3 to 500 kg. Dating from 1998, SFL's heritage of on-orbit successes includes 65 distinct missions related to Earth observation, atmospheric monitoring, ship tracking, communication, radio frequency (RF) geolocation, technology demonstration, space astronomy, solar physics, space plasma, and other scientific research.
- In its 23-year history, SFL has developed CubeSats, nanosatellites, and microsatellites that have achieved more than 135 cumulative years of operation in orbit. These microspace missions have included SFL's trusted attitude control and, in some cases, formation-flying capabilities. Other core SFL-developed components include modular (scalable) power systems, onboard radios, flight computers, and control software.
Sensor Complement
The NEMO-HD payload consists of two optical instruments.
NMSI (NEMO-HD Multispectral Imager)
NMSI is being developed at UTIAS/SFL. The primary instrument, NMSI, is subdivided into five discrete channels. In addition, NMSI carries two high-definition video channels, each providing real-time video at 25 frames per second (Table 2). The video channels are co-boresighted with the still imagery channels. This allows for a unique real-time imaging mode, in which an operator views the real-time video feed and commands the spacecraft to image a target of interest.
NMSI still imagery observation bands | |||
Channel | Bandwidth (nm) | GSD (Ground Sample Distance) | Swath width |
Panchromatic | 400-900 | 2.8 m | 10 km |
Blue | 420-520 | 5.6 m | 10 km |
Green | 535-607 | 5.6 m | 10 km |
Red | 634-686 | 5.6 m | 10 km |
NIR (Near Infrared) | 750-960 | 5.6 m | 10 km |
NEMO-HD video channels | |||
Primary | RGB | 2.8 m | 5 km |
Secondary | RGB | 40 m | 75 km |
In addition to still imagery, the primary and secondary instruments also generate an RGB video stream with a GSD of 2.8 m and 40 m respectively. The produced video streams have a resolution of 1920 x 1080 pixels and a frame rate of 25 frames/s. The streams are encoded with the H.264 code and relayed to the ground in real time or, optionally, recorded on-board for later downlink (Ref. 7).
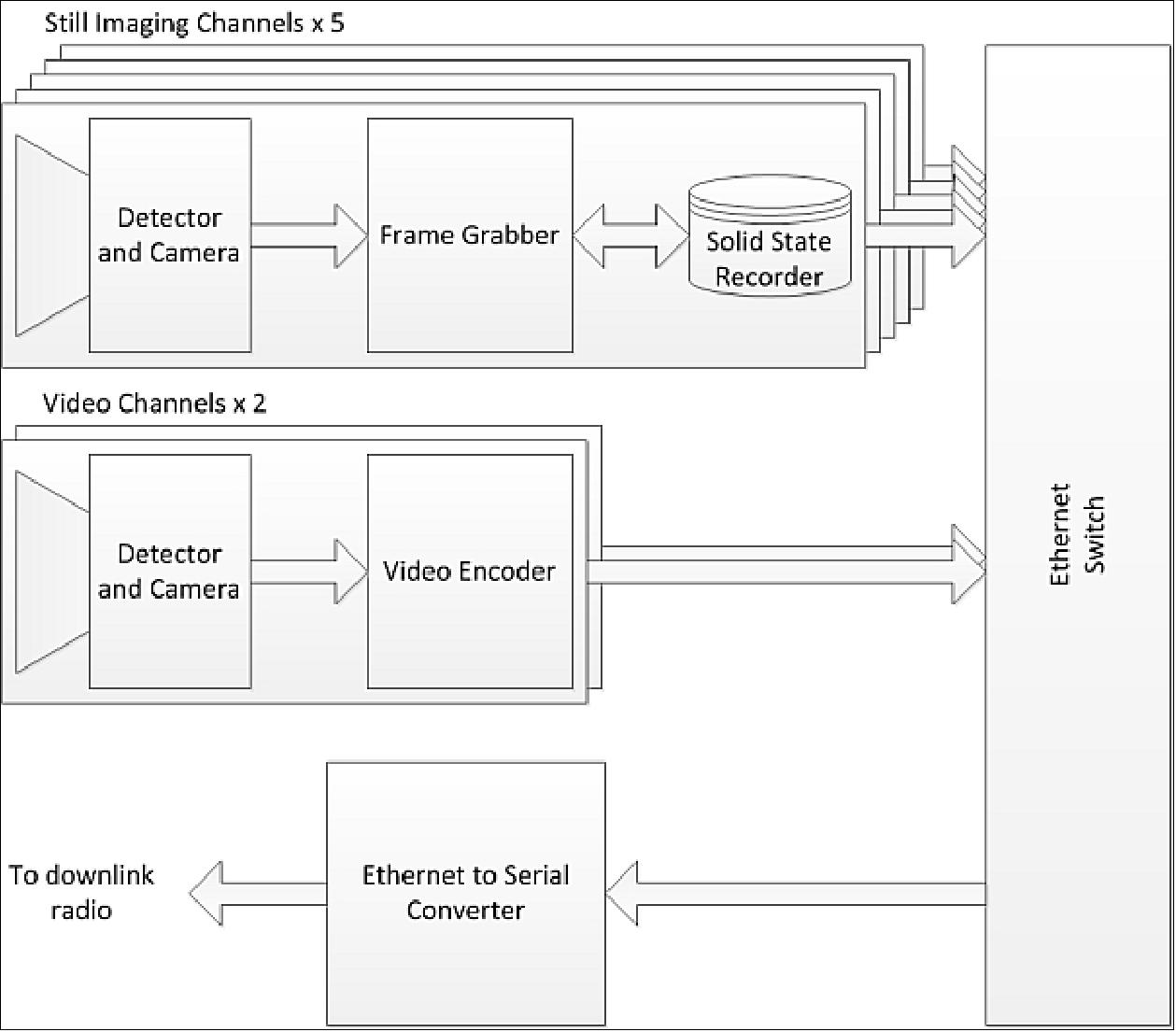
A high level architecture diagram of the NEMO-HD payload electronics is shown in Figure 17. As can be seen, the payload consists of seven independent channels, of which five are used for still imaging and two are dedicated for streaming video.
Detectors and Cameras
As the NEMO-HD mission's primary objective is earth observation, the electronics design naturally revolved around the imaging detector. To stay within the objective of utilizing COTS assemblies, the selection of detectors had to be limited to those utilized by COTS camera units, which had a limitation on the available selection. The pixel pitch, resolution, frame rate, and chroma were all considerations that had to be taken into account in order to find a detector suitable for this instrument.
Frame Grabber
With the detectors selected and camera modules identified, suitable frame grabbers were required next. During imaging, the purpose of the frame grabber is to interface with the camera module to capture raw image data and store it into non-volatile memory. During a pass over the ground station, the frame grabber would read the image data from non-volatile storage and send it to the high-speed payload downlink transmitter. To meet these functional requirements, a frame grabber would require having a correct interface to the camera module as well as the downlink subsystem, have sufficient on-board non-volatile storage, and also contain sufficient computational capacity to receive and store the highspeed raw image data. After conducting an extensive trade study of different technologies, industrial grade embedded computers were selected for this application. As will be described further, each frame grabber module is connected to the high-speed
downlink subsystem via Ethernet.
Next, consideration was given to the storage requirement. This challenge was two-fold: firstly, sufficient capacity was required to store the vast quantities of data generated while imaging. Secondly, high read and write speeds were necessary to maximize the capabilities of the spacecraft. Solid state flash drives with a SATA interface were selected due to their ability to meet the above requirements. In total, the NEMO-HD payload is capable of storing hundreds of gigabytes of raw image data, giving the flexibility of increased imaging times before downlinking of data is necessary (Ref. 7).
Video Encoder
In addition to still imaging, the NEMO-HD payload is required to capture high definition (1920 x 1080 pixels), 25 frames/s video streams from the primary and secondary instruments, which are to be encoded through the H.264 code and streamed to the ground in real time or recorded for later downlink. COTS digital signal processors (DSPs) with integrated video processing subsystems were applied to implement this functionality. As with the frame grabber, each video encoder module also ties to the high-speed downlink subsystem via Ethernet.
Ground Segment
SPACE-SI ground control infrastructure
As part of a work package a ground control station system for communication with a wide array of academic and commercial satellites was installed. The investment is of great strategic importance as it will enable satellite communications, command, control and reception of satellite data for scientists working in the fields of remote sensing, meteorology and astrophysics, as well as for developers of new technologies.
The ground station consists of two antennas, the smaller being set up on the roof of the Faculty of Electrical Engineering (University of Ljubljana) and the larger set up near Pomjan. The smaller antenna will be primarily used for transmitting while the large antenna will serve exclusively as receiving antenna.
With a well positioned and adaptable ground control station station, covering areas of the Alps, the Pannonian Plain and the Mediterranean region, Space-SI will become attractive for many research and development groups around the world and will offer support for communications with their satellites during overflights of areas that the GCS (Ground Control Segment) will cover. This will open up possibilities of accessing different kinds of data, information, technologies and services with a high added value not only for Slovene space activities, but also for ESA members and the wider international community. 20)
References
1) "Slovenia from Space 2012/2013," SPACE-SI, URL: http://www.space.si/en/
2) "NEMO-HD - Next-Generation Earth Monitoring and Observation - High Definition," UTIAS/SFL, 2014, URL: http://utias-sfl.net/?page_id=1233
3) F. M. Pranajaya, R. E. Zee, S. C. O. Grocott, T. Rodič, D. Matko, K. Oštir, M. Peljhan, A. Urbas , H. Fröhlich, S. Blažič, A. Marsetič, "NEMO-HD : High-Resolution Microsatellite for Earth Monitoring and Observation," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
4) F. M. Pranajaya, R. E. Zee, S. C. O. Grocott, T. Rodič, D. Matko, K. Oštir, M. Peljhan, A. Urbas, H. Fröhlich, S. Blažič, A. Marsetič, "NEMO-HD : High-Resolution Microsatellite for Earth Monitoring and Observation," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-I-4, URL: :http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1017&context=smallsat
5) "High-Resolution Microsatellite for Earth Monitoring and Observation," SPACE-SI,May 17, 2013, URL: https://web.archive.org/web/20160802000858/http://www.space.si/en/satellites/high-resolution-microsatellite-for-earth-monitoring-and-observation/
6) Simon Grocott, "The NEMO-HD Spacecraft with Breadboard Instrument Test Results," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, paper: IAA-B9-0403,
7) Jakob Lifshits, L. Stras, S. Grocott, F. Pranajaya, R. E. Zee, T. Rodič, D. Matko, K. Oštir, M. Peljhan, A. Urbas, H. Fröhlich, S. Blazic, A. Marsetič, "NEMO-HD: A High Performance Multispectral Earth Observation Microsatellite Enabled by COTS Components," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13.B1.2.5
8) "High-Resolution Microsatellite for Earth Monitoring and Observation," SPACE-SI, URL: https://web.archive.org/web/20160802000858/http://www.space.si/en/satellites/high-resolution-microsatellite-for-earth-monitoring-and-observation/
9) Simon Grocott, "NEMO-HDHigh Definition Video and Multispectral Earth Imaging on a Microsatellite Platform," Geospatial World Forum 2017 Hyderabad, India, URL: https://geospatialworldforum.org/speaker/SpeakersImages/NEMO-HD-high-definition-video-and-multispectral-earth-imaging-on-a-microsatellite-platform.pdf
10) Bryan Johnston-Lemke, Nathan G. Orr, Grant Bonin, Robert E. Zee, "Modular Power System: Enabling Scalable Missions for the 1W to 1kW Range," Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-I-6, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2914&context=smallsat
11) Drago Matko, Tomaž Rodič, Simon Grocott, Robert Zee, Freddy Pranajaya, Gregor Klančar, Gašper Mušič, Luka Teslić, Sašo Blažič, "Nemo HD Experimental Mode: Technology Demonstration of Visual Based Attitude Control," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, paper: IAA-B9-1203
12) Gregor Klančar, Saso. Blažič, Drago Matko, Gasper Mušič, "Image-Based Attitude Control of a Remote Sensing Satellite," Journal of Intelligent and Robotic Systems, Springer,Vol. 66, No. 3, 2012, pp: 343-357, DOI 10.1007/s10846-011-9621-1, URL: http://tinyurl.com/jftphxq
13) David Lowe, "Demo Software: SIFT Keypoint Detector," University of British Columbia, URL: http://www.cs.ubc.ca/~lowe/keypoints/
14) "Vega return to flight proves new rideshare service," ESA Enabling & Support, 3 September 2020, URL: https://www.esa.int/Enabling_Support/Space
_Transportation/Vega/Vega_return_to_flight_proves_new_rideshare_service
15) "With Vega, Arianespace successfully performs the first European mission to launch multiple small satellites," Arianespace Press Release, 3 September 2020, URL: https://www.arianespace.com/press-release/with-vega-arianespace-successfully-performs-the-first-european-mission-to-launch-multiple-small-satellites/
16) "Vega flight VV16," Wikipedia, URL: https://en.wikipedia.org/wiki/Vega_flight_VV16
17) Mike Safyan, "Planet's First Launch of 2020: 26 SuperDoves on a Vega," Planet, 13 February 2020, URL: https://www.planet.com/pulse/planets-first-launch-of-2020-26-superdoves-on-a-vega/
18) Niels Roth, Bryan Johnston-Lemke, Nicolaas Handojo, Simon Grocott, Robert E. Zee, Tomaž Rodič, Ana Urbas, Matevž Bošnak, "Flight Results of the Attitude Determination and Control System for the NEMO-HD Earth Observation Microsatellite," Proceedings of the 35th Annual AIAA/USU Virtual Conference on Small Satellites, August 7-12, 2021, Logan, UT, USA, paper: SSC21-III-07, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=5027&context=smallsat
19) "Slovenia Releases Color Image from NEMO-HD Microsatellite Built by Space Flight Laboratory (SFL) in Collaboration with SPACE-SI," UTIAS/SFL, 8 February 2021, URL: https://www.utias-sfl.net/?p=3539
20) Krištof Oštir, Aleš Marsetič, Peter Pehani, Matej Perše, Tatjana Veljanovski, Klemen Zakšek, Janez Zaletelj, Tomaž Rodič, "Development of an Automatic Near-Real-Time Image Processing Chain for Small Satellites," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, paper: IAA-B9-0804
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top