NOAA POES Series - 5th Generation
EO
Atmosphere
Ocean
Cloud type, amount and cloud top temperature
The POES (Polar Orbiting Environmental Satellites) program is a joint effort by NASA (National Aeronautics and Space Administration), NOAA (National Oceanic and Atmospheric Administration) and international partners in Europe, including EUMETSAT (European Organisation for the Exploitation of Meteorological Satellites) and organisations in France, Canada and the United Kingdom. The launch of NOAA-15 in May 1998 began the fifth generation of POES, which consists of five polar orbiting satellites. The series aims to meet the objectives of global soundings and imagery, global and regional surface and hydrological observations, service provision of direct readout, data collocation and S&R (Search and Rescue), and space environment and ozone observations.
Quick facts
Overview
| Mission type | EO |
| Agency | NOAA |
| Mission status | Operational (extended) |
| Launch date | 23 Jan 1970 |
| Measurement domain | Atmosphere, Ocean, Land, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Liquid water and precipitation rate, Atmospheric Temperature Fields, Cloud particle properties and profile, Aerosols, Multi-purpose imagery (ocean), Radiation budget, Multi-purpose imagery (land), Surface temperature (land), Vegetation, Albedo and reflectance, Surface temperature (ocean), Atmospheric Humidity Fields, Ozone, Trace gases (excluding ozone), Sea ice cover, edge and thickness, Soil moisture, Snow cover, edge and depth, Ocean surface winds, Atmospheric Winds |
| Measurement detailed | Cloud top height, Precipitation Profile (liquid or solid), Ocean imagery and water leaving spectral radiance, Aerosol absorption optical depth (column/profile), Cloud cover, Precipitation intensity at the surface (liquid or solid), Aerosol optical depth (column/profile), Cloud type, Cloud imagery, Cloud liquid water (column/profile), Land surface imagery, Upward short-wave irradiance at TOA, Upward long-wave irradiance at TOA, Aerosol effective radius (column/profile), Fire fractional cover, Earth surface albedo, Short-wave Earth surface bi-directional reflectance, Atmospheric specific humidity (column/profile), O3 Mole Fraction, Atmospheric temperature (column/profile), Land surface temperature, Sea surface temperature, Sea-ice cover, Snow cover, Soil moisture at the surface, Wind speed over sea surface (horizontal), Cloud top temperature, Normalized Differential Vegetation Index (NDVI), Snow water equivalent, Wind profile (horizontal), Sea-ice thickness, Volcanic ash, Fraction of Absorbed PAR (FAPAR), CO2 Mole Fraction, Height of tropopause, Temperature of tropopause, Downward short-wave irradiance at Earth surface, Long-wave Earth surface emissivity, Long-wave cloud emissivity |
| Instruments | ERBE, LRIT, A-DCS4, SEM (POES), AMSU-A, VHRR, AVHRR/2, APT, AVHRR/3, AVHRR/1, FPR, AMSU-B, A-DCS3, S&R (NOAA), SPM, Argos, TOVS (HIRS/2 + MSU + SSU), NOAA Comms, ATOVS (HIRS/3 + AMSU + AVHRR/3), MHS, EHIC, SR, SEM/TED, VTPR, HIRS/2, HIRS/3, MSU, HIRS/4, SEM/MEPED, SSU, AVCS, MAXIE, SBUV/2 |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Earth radiation budget radiometers, Space environment, Other, Atmospheric chemistry, Communications, Data collection, Atmospheric temperature and humidity sounders, In situ |
| CEOS EO Handbook | See NOAA POES Series - 5th Generation summary |
Related Resources
Summary
Mission Capabilities
Each mission of the fifth generation POES series carries up to seven different instruments. These are AVHRR-3 (Advanced Very High Resolution Radiometer), a six channel radiometer that collects multi-purpose day and night imagery, HIRS-3 (High Resolution Infrared Sounder), a filter radiometer with the objectives of measurement of temperature profiles, moisture content, cloud height and surface albedo, AMSU (Advanced Microwave Sounding Unit), a series of three microwave radiometers, AMSU-A1, -A2 and -B, that aim to obtain global temperature and humidity profiles, and MHS (Microwave Humidity Sounder) a five channel self-calibrating, total power, microwave scanning radiometer that provides humidity profiling capabilities. POES series satellites also carry SBUV-2 (Solar Backscatter Ultraviolet Radiometer), a UV spectro-radiometer for measurement of ozone profiles and backscatter radiation, SEM-2 (Space Environment Monitor-2), a multi-channel charged particle spectrometer that measures the population of the Earth's radiation belts and the particle phenomena resulting from solar activity, as well as SARSAT (Search and Rescue Satellite Aided Tracking), part of an international cooperative satellite-based radiolocation system (COSPAS-SARSAT).
The fifth generation of the POES series consists of NOAA-15, -16, -17, -18, and -19, of which NOAA-15, -18, and -19 are still operational as of September 2022. NOAA-15 carries AMSU, AVHRR-3, HIRS-3, SARSAT and SEM-2, while NOAA-18 and -19 carry AMSU, AVHRR-3, HIRS-3, SARSAT, SEM-2, MHS and SBUV-2.
Performance Specifications
Across its eight instruments, the POES series has a spatial resolution range of 16 km (AMSU-B) to a maximum of 20.3 km (HIRS-3), swath width 2100 km (AMSU-A1/2) to 2900 km (AVHRR-3) and FOV (Field of View) 1.3° (HIRS-3) to ±55.37° (AVHRR-3). The series also has twice daily full global coverage with AMSU-B.
The NOAA-POES series satellites all operate in sun-synchronous circular orbits, with orbital altitudes of 813 km (NOAA-15), 833 km (NOAA-17), 870 km (NOAA-16, -18, -19), and inclinations of 98.6° (NOAA-15), 98.8° (NOAA-16) and 98.75° (NOAA-17, -18, -19).
Space and Hardware Components
The NOAA POES series fifth generation satellites utilise identical spacecraft buses, manufactured by LMSSC (Lockheed Martin Space Systems Company), consisting of four main assemblies, IMP (Instrument Mounting Platform), EBM (Equipment Support Module), RCE (Reaction Control Equipment) and SA (Solar Array). The bus has dimensions of 4.18 m length, 1.88 m diameter and overall length, including solar paddles, of 7.4 m, with a launch mass of 2232 kg. The bus also carries the ADCS (Attitude Determination and Control Subsystem), RCS (Reaction Control Subsystem) and the CCS (Command and Control Subsystem), which provide on-orbit attitude control and guidance through reaction wheels and Earth, sun, and inertial reference sensors. On-board data handling is provided by combinations of up to five 0.9 Gbit DTRs (Digital Tape Recorder) and up to three 2.7 Gbit SSRs (Solid State Recorder).
NOAA POES Series - 5th Generation Satellites
Spacecraft Sensor Complement - NOAA-15 Mission Status Sensor Complement - POES References
The 5th generation series of POES (Polar Orbiting Environmental Satellites) started with NOAA-K (NOAA-15) which was launched on a Titan II vehicle on May 13, 1998 from VAFB, CA into a morning orbit to replace the aging NOAA-12 satellite.
The overall objectives of the POES series are to:
• Provide an uninterrupted flow of global environmental information in support of operational requirements for:
- Global soundings
- Global imagery
- Global and regional surface & hydrological observations
- Service provision of direct readout, data collocation and S&R (Search and Rescue)
- Space environment and ozone observations
• Establish long-term data sets for climate monitoring and change predictions
Background: The POES program is a cooperative effort between NASA, NOAA (National Oceanic and Atmospheric Administration), and their international partners: France (CNES), Canada, the United Kingdom (UK), and EUMETSAT. NASA/GSFC (Goddard Space Flight Center) is responsible for the construction, integration and launch of NOAA satellites and instruments, while NOAA is in charge of all spacecraft operations, data reception, archiving and distribution.
According to NOAA convention all satellites are designated with a letter prior to achieving orbit. The letter name is converted into a number on achieving orbit. For instance, NOAA-M, launched on June 24, 2002, was redesignated as NOAA-17 after achieving its sun-synchronous LEO (Low Earth Orbit).
1st generation: 1960 - 1965 | TIROS series [TIROS-1 (1960) to TIROS-10 (1965)] |
2nd generation: 1966 - 1969 | TOS (TIROS Operational System) series as pre-launch designation. The in-orbit satellite designation was ESSA [ESSA-1 (1966) to ESSA-9 (1969)], after the S/C operating agency. |
3rd generation: 1970 - 1976 | ITOS (Improved TIROS Operational System) series as pre-launch designation. The in-orbit satellite designation was NOAA [NOAA-1 (1970) to NOAA-5 (1976)] |
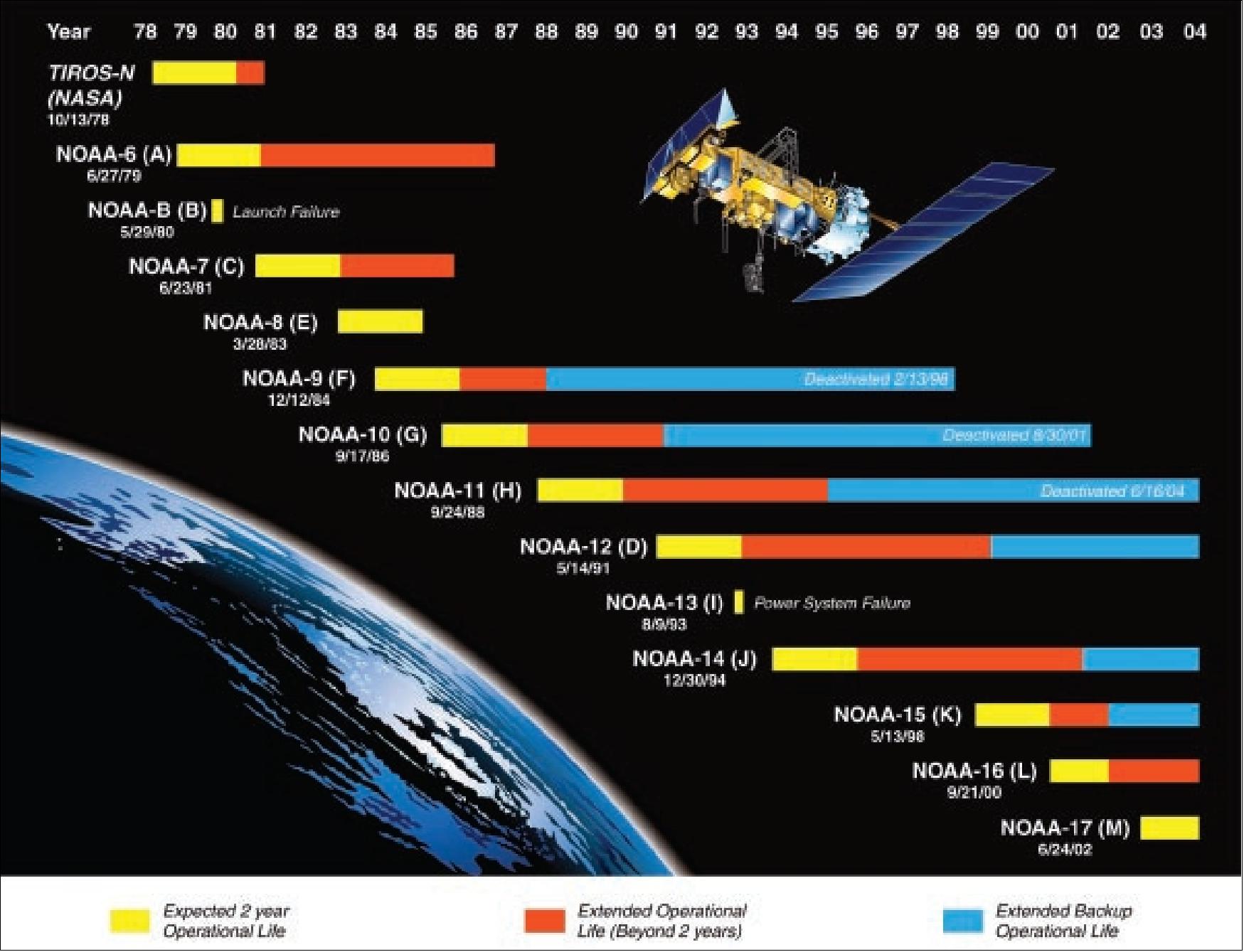
4th generation: 1978 - 1994 | ATN [Advanced TIROS-N) series. After TIROS-N (1978) the pre-launch designation changed to NOAA-A (the corresponding inflight name was NOAA-6). The pre-launch letter designation was kept throughout. NOAA-14 was the last S/C |
5th generation: 1998 - 2009 | NOAA-15 and -16 (launch May 13, 1998 and Sept 21, 2000, respectively), former NOAA-K and -L), NOAA-M (NOAA-17, launch June 24, 2002), NOAA-N (NOAA-18, launch May 20, 2005), NOAA-N' (NOAA- 19, launch Feb. 6, 2009) |
Spacecraft | Orbit | Launch or projected launch |
NOAA-15 (K prior to launch) | AM orbit (7:30) | May 13, 1998 |
NOAA-16 (L prior to launch) | PM orbit | Sept. 21, 2000 |
NOAA-17 (M prior to launch) | AM orbit (10:00 change!!) | June 24, 2002 with Titan-2 vehicle |
NOAA-18 (N prior to launch) | PM orbit | May 20, 2005 with Delta-2 vehicle |
MetOp-A | AM orbit | Oct. 19, 2006 with Soyuz vehicle |
NOAA-19 (N' prior to launch) | PM orbit | Feb. 06, 2009 with Delta-2 vehicle |
MetOp-B | AM orbit | Sept. 17, 2012 with Soyuz vehicle |
Spacecraft
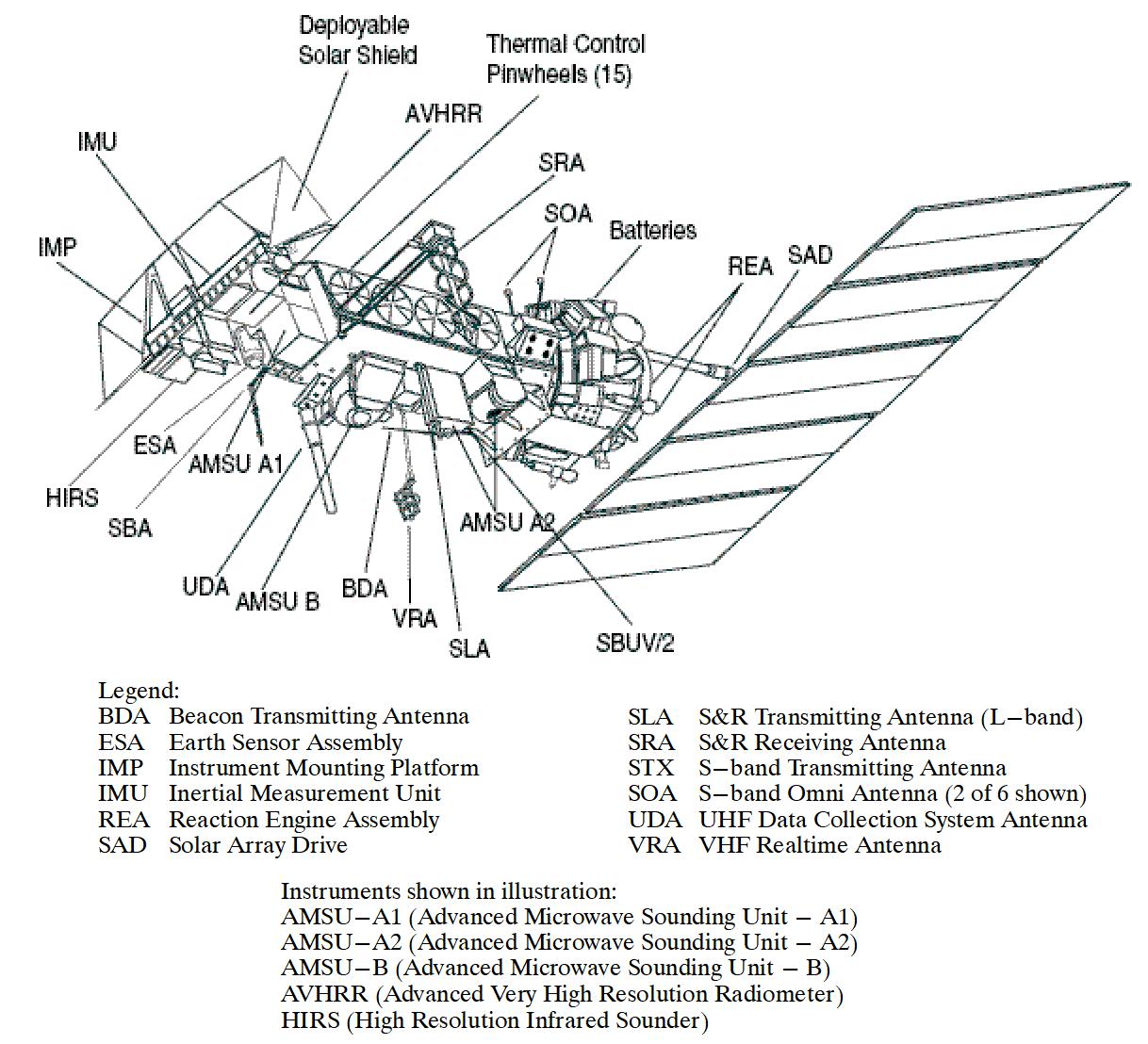
The K L M spacecraft, developed and built by LMSSC (Lockheed Martin Space Systems Company), have significant changes to the previous 4th generation satellites with regard S/C design and payload. The S/C structure comprises four assemblies: IMP (Instrument Mounting Platform), EBM (Equipment Support Module), RCE (Reaction Control Equipment), RCS (Reaction Support Structure), and SA (Solar Array) assembly. To meet the increased power requirements of new instruments, two additional solar panels have been added, the solar array has about 45% more output. The batteries, propulsion tank capacity, the size of the reaction wheels and magnetic coils used for momentum unloading and attitude control, have also increased in capacity. The spacecraft structure has been stiffened primarily to support the heavier AMSU instruments and improve launch vehicle load margins. Several antennas have been relocated and/or built with new materials and processes to improve performance. Flight computer memory has been doubled and the flight software modified to meet new requirements. 2) 3)

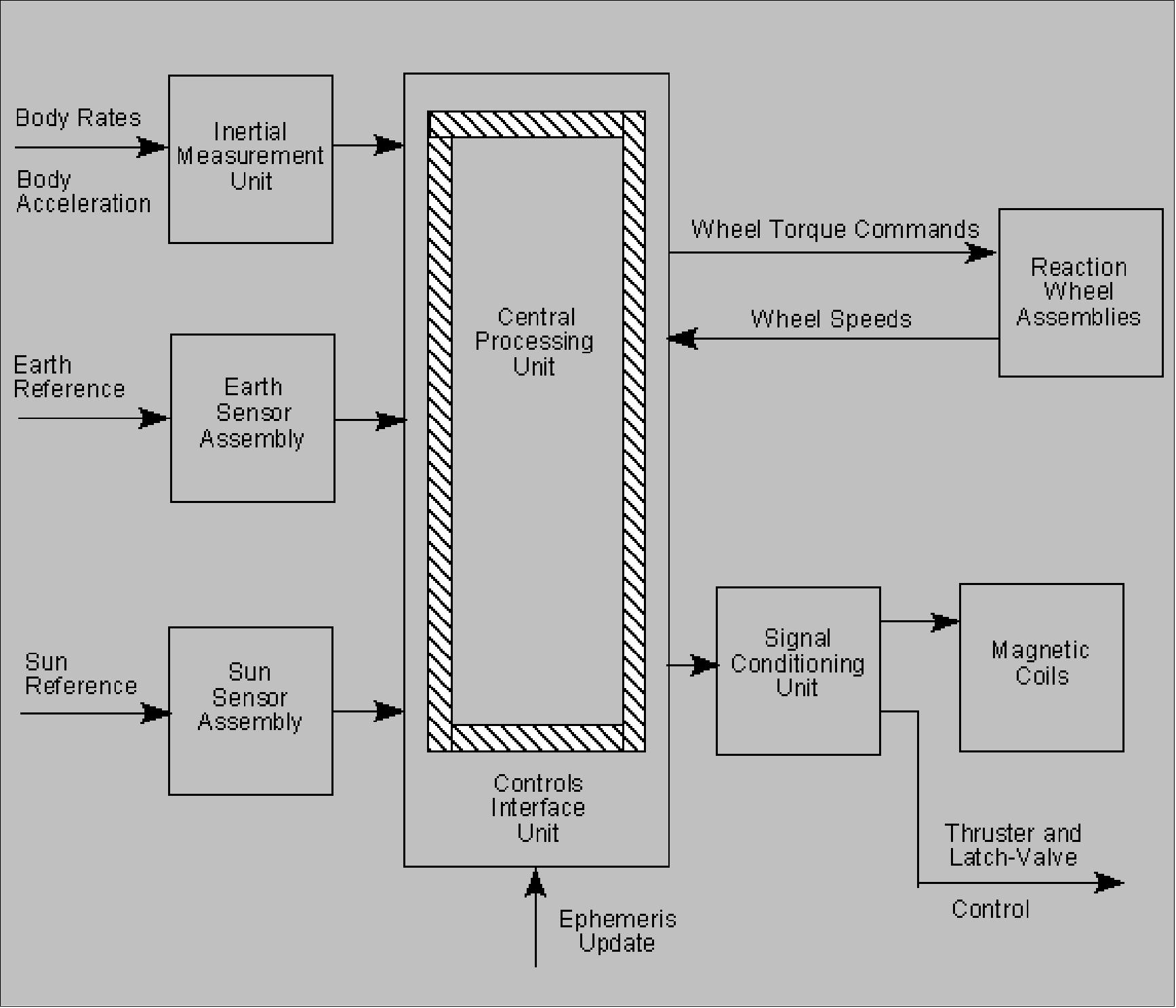
The ADACS (Attitude Determination and Control Subsystem) provides in conjunction with RCS (Reaction Control Subsystem) and the CCS (Command and Control Subsystem) the functions of the on-orbit attitude control and ascent guidance. It is a zero-momentum system consisting of reaction wheels and Earth, sun, and inertial reference sensors. In the subsystem's attitude-control mode, the Earth Sensor Assembly (ESA) and the sun sensor, together with rates derived from the IMU (roll, pitch and yaw), furnish the primary attitude reference. Actuation is provided by reaction wheels and cold gas thrusters. Attitude accuracy is 0.2º, knowledge is 0.1º in post-processing. Attitude determination with 3σ variation >0.14º is provided onboard the satellite.
Satellite orbit | Sun-synchronous circular, altitude = 833±19 km or 870±19 km, inclination = 98.7º (retrograde) |
S/C dimensions (main body) | 4.18 m length, 1.88 m diameter, overall length = 7.4 m |
S/C mass | 1479 kg on orbit, 2232 kg at launch (756 kg propellant) |
S/C power (solar array) | 833 W min, array size: 2.73 m x 6.14 m (16.76 m2) |
On-board data recording | 5 DTR (Digital Tape Recorder), each with a capacity of 0.9 Gbit. Solid-State Recorders (SSR) will fly on NOAA-M (1 SSR, 4 DTR), and NOAA-N and NOAA-N' with 3 SSRs each with a capacity of 2.7 Gbit |
AKM (Apogee Kick Motor) | Star 37XFP (Thiokol Corporation), used to circularize the orbit after S/C separation. A thrust of 42.38 kN is provided (51 s burn) |
S/C design life | > 2 years |
Satellite Communication Subsystem
The spacecraft transmits instrument data to the ground for three primary functions: Command and Data Acquisition (CDA), Direct Broadcast, and Search and Rescue (S&R). CDA ground stations are located at Wallops Island, VA, and at Fairbanks, Alaska. The CDA stations receive stored GAC (Global Area Coverage) and LAC (Local Area Coverage) data from each spacecraft. The CDAs may also receive real-time data during a station pass of a satellite.
The on-board communication subsystem comprises 14 antennas, 9 transmitters, and redundant receivers, together with associated filters and other RF feed components. The subsystem provides the following functions:
• Reception and demodulation of S-band TT&C data
• Continuous transmission (broadcast) of TIP data via the VHF Beacon
• Continuous transmission (broadcast) of APT data at VHF-band
• Continuous transmission (broadcast) of HRPT data at S-band
• Transmission of stored LAC, GAC, TIP, and AIP (AMSU Information Processor) data upon command at S-band
• Reception and filtering of DCS signals
• Reception, processing and retransmission of S&R signals.
Sensor Complement for NOAA-15
AVHRR/3, HIRS/3, AMSU-A (A1+A2), AMSU-B, SEM-2, ARGOS (DCS-2), and S&RSAT.
Type of Service | NOAA-9 through NOAA-19 (-N') |
GAC (Global Area Coverage) Playback | Reduced resolution AVHRR data (4 km) plus stored TIP data at full resolution soundings. GAC data is derived on-board the NOAA satellite by subsampling and averaging the nominal 1 km AVHRR imagery. It provides daily global coverage recorded on-board and transmitted to a NOAA ground station. About 115 minutes of GAC data can be stored on-board. |
LAC | LAC is nominally 1 km resolution AVHRR imagery (which is normal or `high' resolution data) recorded with the on-board tape recorder for subsequent transmission to a NOAA ground station. About 11 minutes of LAC data can be accommodated on a recorder. LAC imagery can only be obtained from NOAA/NESDIS. |
HRPT (High Resolution Picture Transmission) | Full resolution AVHRR & TIP data, Frequency: 1698 or 1707 MHz, data rate = 665.4 kbit/s, split phase PSK. The imagery is available in a format defined by the ground receiving station. |
APT (Automatic Picture Transmission) (LRPT in OPQ era) | Reduced resolution geometrically corrected analog video from two channel of AVHRR, selected by user command. Frequency: 137.50 or 137.62 MHz |
DSB Direct Sounder Broadcasting) | A VHF beacon to users who don't have S-band reception. Data content: HIRS, SEM, DCS, SBUV, & Eph |
NOAA is providing its instrument data freely through direct broadcast to users on a global scale. There are three types of direct broadcasting: (1) the real-time HRPT, (2) the direct sounder broadcast (DSB), also referred to as the real-time very high frequency (VHF) beacon transmissions, and (3) the Automatic Picture Transmission (APT).
The NOAA-POES data reception community is global, it encompasses such entities as:
• US NWS (National Weather Service), all branches of DoD, NASA, USDA (US Department of Agriculture), DOI (US Department of Interior), universities, WMO (World Meteorological Organization), European Modeling Centers, etc.
• Hundreds of registered HRPT (High Resolution Picture Transmission) users world-wide
• Thousands of APT (Automatic Picture Transmission) users world-wide
NOAA-15 orbit: Circular sun-synchronous near-polar orbit; altitude = 833 km; inclination =98.7º; orbital period =102.12 min; equator crossing at about 7:30 AM.
In general, the AM spacecraft of the POES series are orbiting in a descending node while the PM spacecraft orbit in an ascending node (in the latter case, the satellite orbit crosses the equator from south to north).
Note: With the launch of NOAA-M (NOAA-17, launch June 24, 2002) the equator crossing time of the AM series spacecraft was changed from 7:30 AM to 10:00 AM (on descending node). This policy insures that the S/C takes its observations under the most favorable lighting conditions and angle to measure atmospheric ozone. Unlike its predecessors in AM orbits, NOAA-M is furnished with SBUV/2 (Solar Backscatter Ultraviolet Radiometer), an ozone sensor. Also, NOAA-17 represent the last NOAA satellite in the morning orbit. The future morning-orbit service is provided by the MetOp series of EUMETSAT.
Operational status of current POES series spacecraft
• March 20, 2021: A polar-orbiting weather satellite decommissioned nearly eight years ago has broken up, adding to the growing debris population in a key orbit. 5)
- The Space Force’s 18th Space Control Squadron said March 18 it hard confirmed the NOAA-17 satellite broke up March 10. The squadron said it was tracking 16 pieces of debris associated with the satellite, and that there was no evidence the breakup was caused by a collision.
- In a statement to SpaceNews March 19, the National Oceanic and Atmospheric Administration confirmed that the satellite had broken up, having been notified about the incident by NASA’s Orbital Debris Program Office. “At this time, the debris poses little threat to the International Space Station or to any other critical space assets,” NOAA stated.
- The spacecraft, originally designated NOAA-M, launched in June 2002. The spacecraft was designed to operate for three years but served in a primary or backup role for nearly 11 years until NOAA formally decommissioned it in April 2013.
- Neither NOAA nor other agencies released the cause of the breakup. However, NOAA-17 is similar to other polar-orbiting satellites that suffered breakups. In November 2015, the NOAA-15 satellite broke up, nearly a year and a half after a “critical anomaly” ended operations. Two satellites in the Air Force’s Defense Meteorological Satellite Program, DMSP F-13 and DMSP F-12, broke up in February 2015 and October 2016, respectively.
- The failure of DMSP F-13 was blamed on a design flaw in the satellite’s battery that is also found on other DMSP satellites. Those satellites, along with NOAA-15 and NOAA-17, were built by Lockheed Martin.
- When NOAA decommissioned NOAA-17 in 2013, the agency said it performed a “deactivation process” with the spacecraft. In a statement to SpaceNews, NOAA said that process included disconnecting the batteries on the spacecraft as well as opening thruster valves and turning off its transmitters. “These steps were taken to ensure the satellite was as inert as possible and minimized the risk of radio frequency interference with other spacecraft after decommissioning,” NOAA stated.
- Those activities are among the federal government’s recommendations to passivate spacecraft at the end of their lives, removing energy sources that could cause explosions. “All onboard sources of stored energy of a spacecraft or upper stage should be depleted or safed when they are no longer required for mission operations or postmission disposal,” the U.S. government’s Orbital Debris Mitigation Standard Practices document states.
- The fact that a satellite could still break up even after following those best practices shows the limits of those guidelines. “I don’t doubt NOAA did what they could, and think this is more a case of a legacy satellite that was designed in an era before we really cared much about debris mitigation,” said Brian Weeden, director of program planning at the Secure World Foundation.
- While NOAA said the satellite is not a threat to the space station or “other critical space assets,” it is in a sun-synchronous orbit used by other weather and Earth observation spacecraft.
- Some of those satellites are not only threatened by such debris, but also pose a threat of creating more debris. Weeden noted a report by NASA’s inspector general in January that found two NASA missions in polar orbits, QuikSCAT and Terra, not only fail to meet the 25-year threshold for deorbiting spacecraft after the end of their missions, they also pose a risk of explosion because of batteries that cannot be disconnected or propellant tanks that cannot be depressurized.
- That report found that “mitigation-only” activities to prevent the creation of new orbital debris were not sufficient to keep the space environment stable. “Rather, to effectively address the orbital debris issue, global mitigation and strategic remediation efforts are necessary,” the report concluded, recommending NASA support active debris removal efforts, including funding technologies to enable such systems.
- Weeden agreed. “I would hope this serves as yet another example why the U.S. and other governments need to invest in active debris removal capabilities to take legacy satellites that were never designed to comply with the debris mitigation guidelines and remove them from orbit.”
• August 10, 2017: A feat 19 years in the making, NOAA-15 recently made its 100,000th trip around the Earth! NOAA’s polar-orbiting environmental satellites—NOAA-15, NOAA-18 and NOAA-19—orbit 14 times daily from 836 km above Earth. The planet's rotation allows NOAA-15 to see a different area of the Earth with each pass, giving the spacecraft two complete views of weather and environmental conditions around the world each day. 6)
- "NOAA's careful operations and management of polar-orbiting satellites has resulted in over 19 years of operations for NOAA-15, far exceeding its planned five year lifetime,” said Vanessa Griffin, Director of NOAA's Office of Satellite and Product Operations. — She also noted that NOAA-15 not only provides critical information about the environment, but also serves as part of the Search and Rescue Satellite Aided Tracking (SARSAT) program that has enabled the rescue of over 7,700 people in the United States since 1982.
- Data from polar-orbiting satellites support a broad range of environmental monitoring applications, including weather analysis and forecasting, climate research and prediction, global sea surface temperature measurements, atmospheric soundings of temperature and humidity, ocean dynamics research, volcanic eruption monitoring, forest fire detection, global vegetation analysis and more.
- NOAA-15's Current Role: In its prime, NOAA-15 monitored Earth's atmosphere, surface and cloud cover, and collected data on a range of environmental factors. Today, the satellite serves as the back-up to EUMETSAT's Metop-B satellite, which provides data in the morning, and continues to serve as part of the SARSAT system, which as of July 31, 2017, assisted in the rescue of 158 people so far this year. NOAA-15 also collects data from buoys and remote weather stations for the ARGOS (Advanced Research and Global Observation Satellite) program dedicated to environmental study and protection.
• April 16, 2016: 7)
Spacecraft | Operational Status | LTAN (LTAN values are valid as of April 19, 2016) |
NOAA-11, -12, -14, -16, -17 | Decommissioned |
|
NOAA-15 | AM Secondary, operational | 17:46:52 |
NOAA-18 | PM Secondary, operational | 17:53:33 |
NOAA-19 | PM Primary, operational | 14:36:15 |
MetOp-B (EUMETSAT) | AM Primary, operational | 21:31:45 |
MetOp-A (EUMETSAT) | AM Backup | 21:29:05 |
• May 20, 2015: Four MHS instruments are currently on orbit (on Metop-A and -B and NOAA-18 and -19) and are in good health — the only exception being one channel on NOAA-19. A fifth instrument will be launched on board Metop-C in 2018.
The MHS instrument is a radiometer providing operational data from polar orbit in five microwave channels, used to retrieve vertical profiles of atmospheric water vapour. These are key inputs for numerical weather prediction models, which are used operationally for weather forecasting worldwide. The MHS instrument was developed by Matra Marconi Space UK (now Airbus Defence & Space). 8)
Spacecraft | Operational Status | Status | Launch |
NOAA-11 | Decommissioned: June 16, 2004 |
| Sept. 24. 1988 |
NOAA-15 | AM Secondary | Operational | May 13, 1998 |
NOAA-18 | PM Secondary | Operational | May 20, 2005 |
NOAA-19 | PM Primary | Operational | Feb. 06, 2009 |
MetOp-A | AM Primary | Operational | Oct. 19, 2006 |
MetOp-B | AM Backup | Operational | Sept. 17, 2012 |
• NOAA-11: The spacecraft, with a launch Sept. 24, 1988, is decommissioned. It was deactivated on June 16, 2004.
• NOAA-12: The spacecraft, with a launch May 14, 1991. It was decommissioned on Aug. 10, 2007.
• NOAA-14 (J): The spacecraft, with a launch Dec. 30, 1994, is decommissioned. It was deactivated on May 23, 2007.
• NOAA-15 (K): The spacecraft, with a launch May 13, 1998, is in backup mode for the AM orbit. Channel 14 of the AMSU-A instrument stopped working in the Fall of 2000. Channel 11 on the AMSU-A instrument failed in April 2002.
HIRS Filter Wheel Motor ceased Operating June 7, 2009. No Science Data is generated. Commands for Filter Wheel Motor Power On/Off Toggling Once/Orbit were Uploaded on Dec. 16, 2009. NOAA-15 serves as the AM secondary spacecraft.
• NOAA-16 (L): The spacecraft, with a launch Sept. 21, 2000, is in backup mode for the PM orbit. GYRO-3 permanently turned OFF on June 10, 2004. HIRS channels, noise levels impacting imagery, health parameters nominal. TCE24 OFF to warm AVHRR. MIRP rephasing every orbit over south pole.
• NOAA-17 (M): The spacecraft, with a launch June 24, 2002, is the backup observer for the AM orbit. The instrument AMSU-A1 experienced a failure on Oct. 28, 2003, terminating all observations (13 channels) from this instrument.
AMSU-B Channels 18, 19 and 20 science data severely degraded as of Dec. 17, 2009. No products are generated.
• NOAA-18 (N): The spacecraft, with a launch May 20, 2005, was the prime observer for the PM orbit until June 23, 2009. All subsystems are operational except channels 1-10 of HIRS. NOAA-18 is now the PM secondary S/C.
• NOAA-19 (N'): The spacecraft, with a launch on Feb. 6, 2009, was declared “operational” by NOAA in June 2009. It became the prime S/C (PM orbit location) on June 23, 2009.
NOAA-19 MHS went into Fault Mode at 14:25 Z on December 19, 2009 and the instrument was successfully recovered at 19:18 Z on December 21, 2009 to its normal scanning mode.
Sensor Complement for the POES K, L, M, N, N' Series
AVHRR/3, HIRS/3 (KLM, HIRS/4 starting with N), AMSU-A, AMSU-B, SEM-2, SBUV/2 (on all PM missions from K through N'), Argos DCS, S&RSAT. 10) 11)
AVHRR/3 (Advanced Very High Resolution Radiometer)
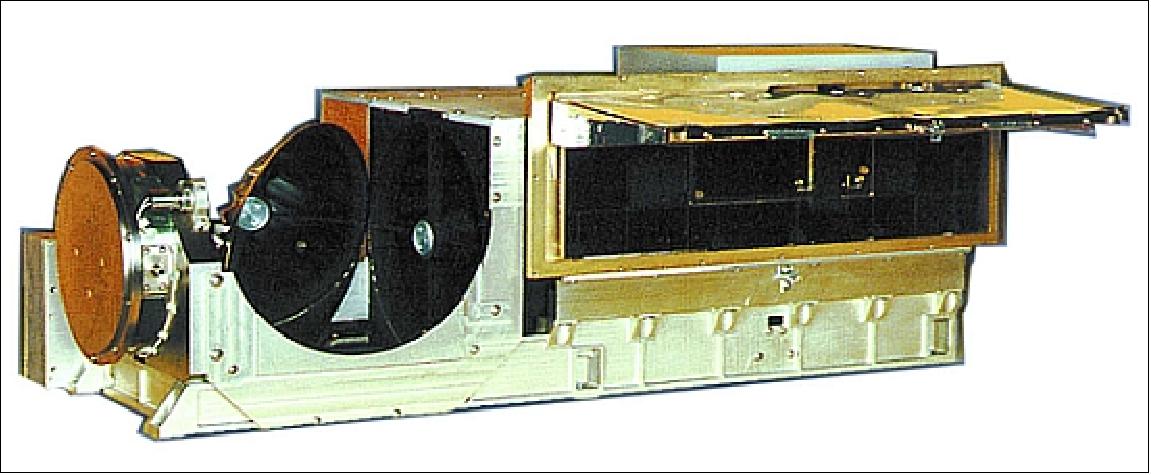
AVHRR/3 is a 3rd generation instrument of AVHRR, heritage of AVHRR/2, built by ITT Aerospace of Fort Wayne, IN. The AVHRR/3 monitors the reflected energy in the visible and infrared portions of the electromagnetic spectrum. Objectives: day and night imaging in six spectral bands of land, water and top of cloud surfaces, sea surface temperature, ice snow and vegetation cover. The instrument scans in the cross-track direction with a FOV of ±55.37º about nadir (swath of 2900 km), IFOV of 1.1 km at nadir (1.3 mrad x 1.3 mrad for all channels). The detectors are passively cooled to <105 K by a two-stage passive radiant cooler. AVHRR/3, a whiskbroom-type instrument like all its predecessors, uses a continuously internal rotational scanning mirror which also views deep space and an internal calibration source. Calibration of the IR channels is performed with four internal blackbodies every scan line.12)
Telescope | 20.3 cm diameter afocal reflective Cassegrainian type |
Scan motor | 360 rpm hysteresis - synchronous |
Scan mirror | 21 cm x 29.5 cm elliptical ribbed beryllium |
Cooler | Two stage radiant cooler controlled @ 105 K |
Data quantization | 10 bit |
Video sample rate | 40 kHz simultaneous sample of all channels |
No of samples per scan | 2048 |
Output data rate | 200 k word/s max (2 Mbit/s in burst mode, 621.3 kbit/s average) |
Instrument size | 80 cm x 36 cm x 30 cm |
Instrument mass, power | 33 kg, 27 W (orbital average) at 28 V |
Line to line scan jitter | ± 17 µs |
Scan sync drift / 24 hours | < 3.0 µs |
Channel | Center wavelength (µm) | Spectral Range FWHM (µm) | Channel Noise | Detector Type | Typical use |
1 | 0.630 (VIS) | 0.58 - 0.68 | SNR≥ 9:1 @ 0.5% albedo | Silicon | Daytime cloud and surface mapping |
2 | 0.862 (VNIR) | 0.725 - 1.00 | SNR≥ 9:1 @ 0.5% albedo | Silicon | Land-water boundaries |
3a | 1.61 (NIR) | 1.58 - 1.64 | SNR≥ 20:1 @ 0.5% albedo | InGaAs | Snow and ice detection |
3b | 3.74 (IR-window) | 3.55 - 3.93 (night selectable) | NEΔT≤0.12 K @ 300 K | InSb | Night cloud mapping, sea surface temperature |
4 | 10.80 (IR-window) | 10.30 - 11.30 | NEΔT≤0.12 K @ 300 K | HgCdTe | Night cloud mapping, sea surface temperature |
5 | 12.00 (IR window) | 11.50 - 12.50 | NEΔT≤0.12 K @ 300 K | HgCdTe | Sea surface temperature |
AVHRR/3 adds a sixth channel in the IR range at 1.61 µm (referred to as channel 3a, operating during the daylight part of the orbit). The objective of channel 3a is to aid in improved snow and ice discrimination and aerosol detection. Channel 3b corresponds to the previous channel 3 on AVHRR/2 and operates during the night portion of the orbit. Splitting channel 3 in this way maintains the HRPT format. The data from the six channels is simultaneously sampled at 40 kHz and converted to 10-bit binary values. The data samples are output in a non-continuous burst of 10 space samples, 2048 Earth samples, and 10 internal calibration target samples at 6 Hz, synchronized with the scan mirror. 13)
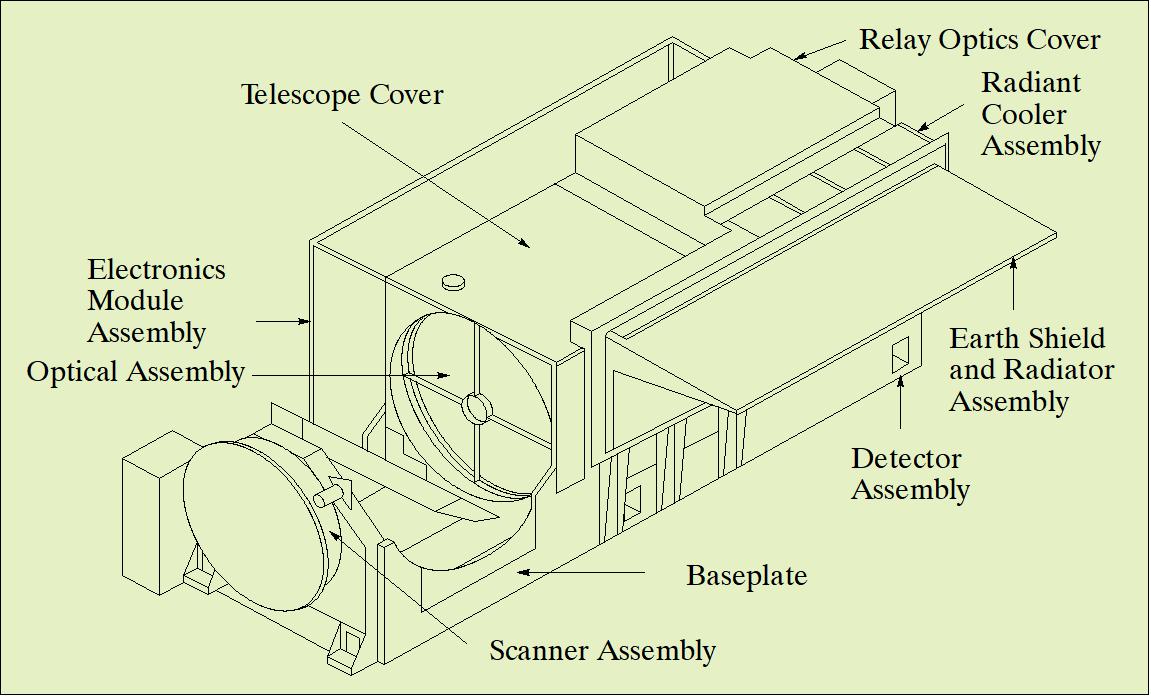
AVHRR/3 (like AVHRR/2) is an optomechanical system comprised of five modules: scanner module, electronics module, radiant cooler, optical system, and baseplate unit. - The optical system consists of collecting telescope (an afocal reflective Cassegrainian type telescope with an aperture diameter of 20.32 cm), combined with secondary (relay) optics which separate the radiant energy into six discrete spectral bands; these are focused onto their respective field stops. Polarization effects have been minimized in channels 1, 2 and 3A by passing the optical beam, transmitted by the first VIS/IR beamsplitter, through a second beamsplitter oriented in such a way as to compensate for polarization introduced by the first beamsplitter (the split gain technique increases the sensitivity for snow and ice coverage, aerosol distribution and vegetation index calculation). - The scan motor design is based on an 80 pole hysteresis synchronous motor. It rotates the mirror at a rate of 360 rpm to produce a contiguous scan on the Earth's surface.
AVHRR/3 provides some data processing provided by MIRP (Manipulated Information Rate Processor). The MIRP sends a data sample pulse to the AVHRR/3 digital output timing logic which results in the sequential transfer of a data word for each radiometric channel. The MIRP processes these data into the following four outputs:
• APT (Automatic Picture Transmission). Any two of the six AVHRR/3 channels can be command-selected for processing. This data undergoes the following:
- Resolution reduction by using every third scan line of AVHRR data
- Geometric correction to reduce the perspective effect due to the Earth's curvature and the satellite altitude
- Digital to analog - The digitally processed APT data are converted to a 2080 Hz bandwidth analog signal, amplitude modulated onto a 2.4 kHz carrier, and bandwidth limited to 4160 Hz in preparation for transmission by the VHF transmitters.
• GAC (Global Area Coverage). MIRP produces the GAC output by combining processed AVHRR/3 data with the TIP data. The GAC frame rate is 2 frames per sec; that is, it is one third of the AVHRR/3 frame rate. The GAC processing of the AVHRR/3 data makes the frame rates directly compatible by only using the data from every third AVHRR/3 scan.
• HRPT (High Resolution Picture Transmission). MIRP produces the HRPT and the LAC outputs by combining unprocessed AVHRR/3 data with TIP data. The basic frame rate and data rate of the HRPT is compatible with the AVHRR/3.
• LAC (Local Area Coverage). LAC is, by definition, recorded HRPT; thus, the LAC output is supplied only to the spacecraft DTR input selector for recording.
AVHRR/3 in-flight calibration: The instrument performs periodic calibrations. The scanning mirror uses a deep space view and an internal scan position as calibration reference. Those facilities (view to space and onboard black body targets) are used for the primary calibration of the IR channels (3B, 4 and 5), that occurs at each scan cycle.
HIRS/3 (High Resolution Infrared Sounder)
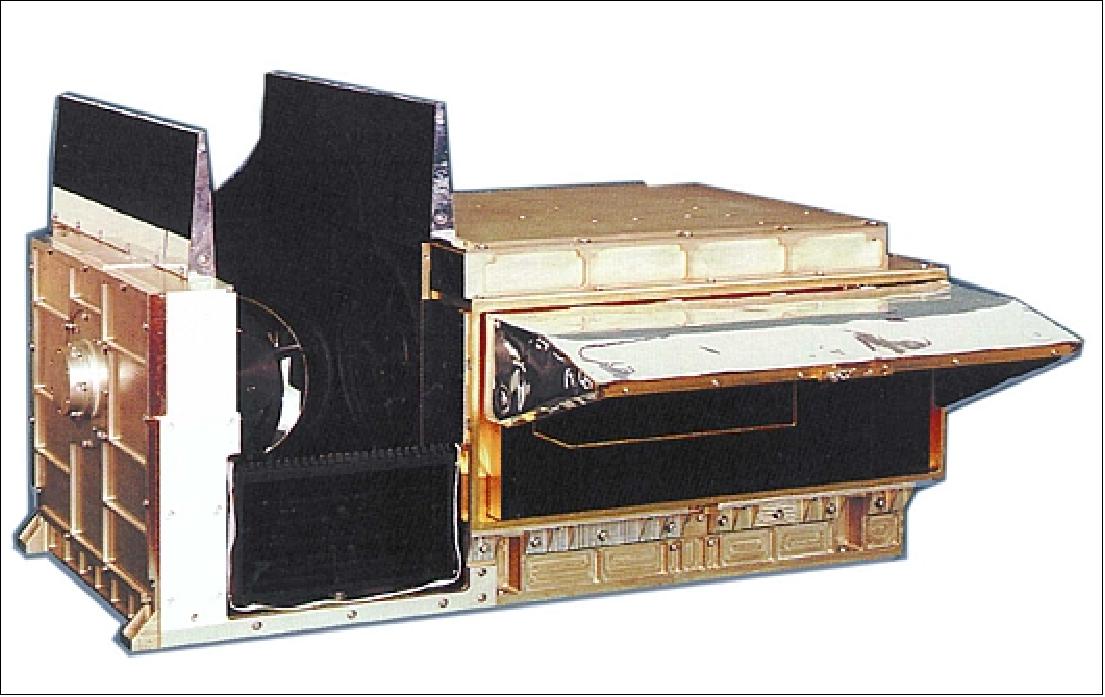
HIRS/3 was designed/developed by ITT Aerospace/CD (Communications Division) of Fort Wayne, IN, heritage of HIRS/2. Objective: measurement of temperature profiles, moisture content, cloud height and surface albedo. HIRS/3 scans the Earth's surface in twenty spectral bands in the range 0.69 - 14.95 µm. The sensor scans across-track in a `stop-and stare' mode (discrete stepping) at a scan rate of 6.4 s (56 Earth views per scan). FOV = ±49.5º about nadir (swath =±1080 km). Collected energy is separated by a beamsplitter into LWIR (> 6.5 µm) and SWIR (3.7 to 4.6 µm), passed through field stops and through a rotating filter wheel to cooled detectors. In the SWIR path, a second beamsplitter separates the visible channel to a silicon detector. Three detectors are used to sense the radiation. A silicon photodiode at the instrument temperature (nominally 15º C) detects the visible energy. An InSb detector and a MCT detector (mounted on a passive radiator and operating at 100 K) sense the SWIR and TIR energy. The NESR (Noise Equivalent Spectral Radiance) is given in W/(cm2 sr cm-1). 14) 15)
Optical FOV (Field of View) | 1.4º for VIS and SWIR; 1.3º for TIR |
Telescope aperture | 15 cm diameter |
Channel to channel registration | TIR: <1.5% of 1.8º step size; SWIR: <1% of cha. 19 FWHM |
Earth scan angle, scan steps | ±49º from nadir, 56 increments of 1.8º |
Step and dwell time | 100 ms total |
Total scan plus retrace time | 6.4 s |
Swath width | 2160 km |
Spatial resolution | 20.3 km (1.4º IFOV) at nadir; 18.9 km (1.3º IFOV) at nadir |
Data quantization | 13 bit |
Instrument mass, power, size | < 35 kg, < 24 W, 41 cm x 46 cm x 69 cm |
Data rate | < 2.88 kbit/s |
Channel No | Center Wavelength | Sensitivity NESR | FWHM Bandwidth (cm-1) | Principal absorbing constituent | Measurement |
1 | 14.95 | 0.300 | 3 | CO2 | Temperature sounding |
6 | 13.64 | 0.024 | 16 | CO2/H2O | Temperature sounding |
8 | 11.11 | 0.010 | 35 | Window | Surface temperature and cloud detection |
9 | 9.71 | 0.015 | 25 | Total ozone | Total ozone retrieval |
10 | 12.47 | 0.015 | 16 | H2O | Low level water vapor |
13 | 4.57 | 0.0006 | 23 | N2O | Temperature sounding |
15 | 4.47 | 0.0004 | 23 | CO2/N2O | Temperature sounding |
17 | 4.13 | 0.0002 | 28 | N2 | Temperature sounding |
18 | 4.00 | 0.0002 | 35 | H2 | Surface temperature |
20 | 0.690 | 0.10% albedo | 1,000 | Clouds | Cloud detection |
IR Calibration of the HIRS/3 is provided by programmed views of two radiometric targets: a warm target (blackbody at 290 K) mounted to the instrument base and a view of space. Data from these views provides sensitivity calibrations for each channel every 40 lines (256 seconds), if commanded. Internally generated electronic signals provide calibration and stability monitoring of the amplifier and readout electronics. Note: The calibration sequencing of HIRS/3 has changed (versus HIRS/2) to remove viewing of the cold internal reference. This allows an additional scan line of data each calibration period. Secondly, while the HIRS/3 is used primarily for temperature sounding, channel 20 has been upgraded to enhance generation of radiation budget products. The HIRS/3 instrument objective is to achieve greater overall detector performance and lower noise levels.
HIRS/4 (High Resolution Infrared Sounder). This instrument will fly on NOAA-N, NOAA-N', and MetOp 1 and 2, but not on MetOp-3 (IASI will be the infrared sounder). It has essentially the same features as the HIRS/3, with one significant change. The sampling distance along a scan line remains at nominally 18 km, but the IFOV has been decreased to 10 km (0.7º) from 18 km. This was done to improve the utility of the data near cloud boundaries.
AMSU (Advanced Microwave Sounding Unit)
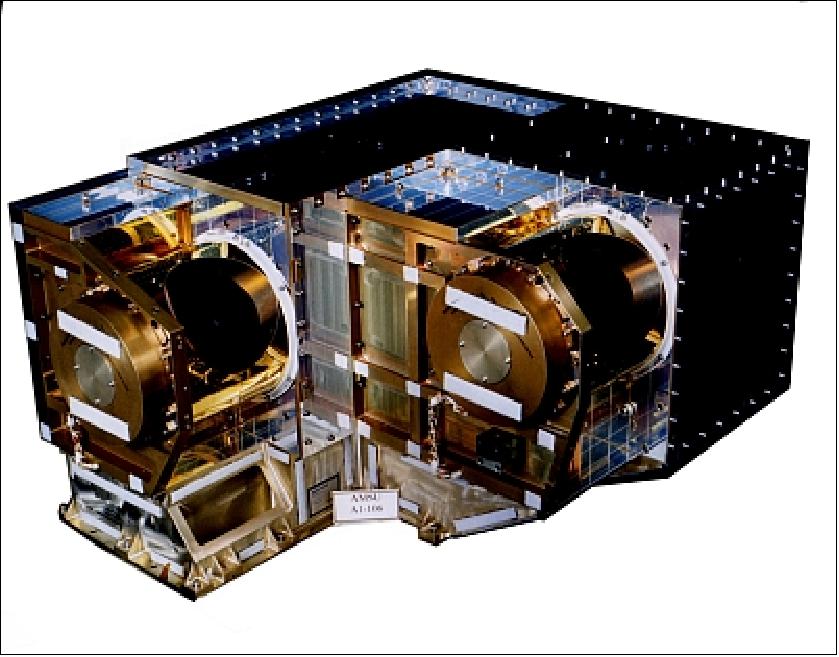
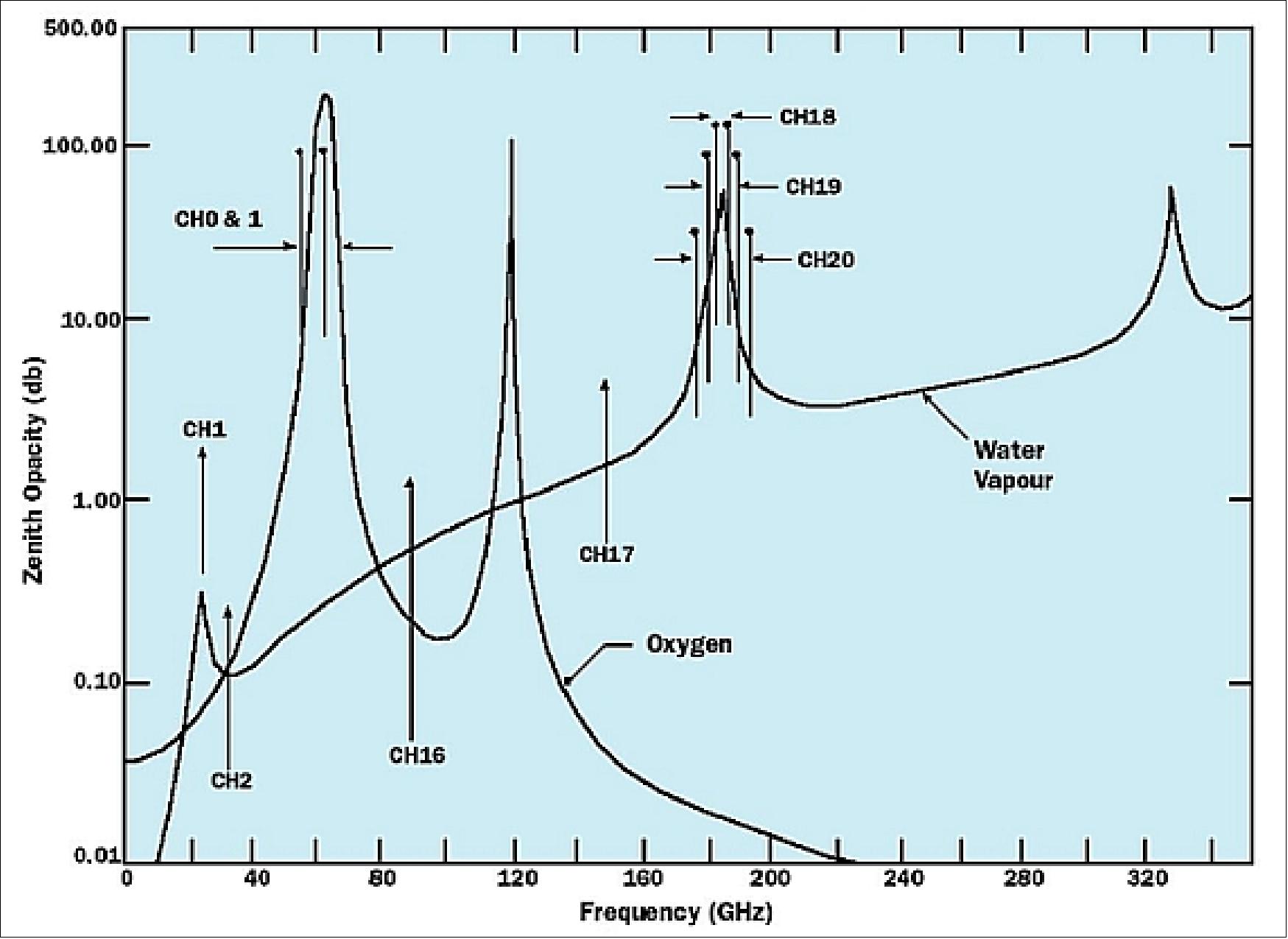
AMSU is a 20-channel microwave radiometer. Its primary mission objective is to obtain global temperature and humidity profiles. AMSU is comprised of three separate units: AMSU-A1 (channels 3-15), AMSU-A2 (channels 1 and 2), and AMSU-B (channels 16 - 20). Channels 3 - 14 use the 50 to 60 GHz oxygen band to provide data for vertical temperature profiles up to 50 km. The “window” channels (1, 2, 15, and 16) provide data to enhance temperature sounding by correcting for surface emissivity, atmospheric liquid water, and total precipitable water. Channels 18 - 20 use the 183.3 GHz water vapor absorption line to provide data for the humidity profile. - The first flight of AMSU took place on the NOAA-15 satellite with a launch in 1998.
AMSU-A (Advanced Microwave Sounding Unit - A), always consisting of AMSU-A1 and AMSU-A2, was built by Aerojet, a subsidiary of GenCorp of Sacramento, CA for NASA/GSFC. AMSU-A replaces the MSU and SSU instruments flown on previous missions. AMSU-A was first flown on NOAA-15 (launch May, 1998). AMSU-A is a cross-track, line-scanning instrument (whiskbroom type) designed to measure scene radiances (brightness temperatures).
Objectives: atmospheric temperature profile measurements from the surface up to about 50 km in 15 channels. Temperature resolution: 0.25 - 1.2 K. AMSU-A is configured in the following major subsystems: Antenna/Drive/Calibration Subsystem; Receiver Subsystem; Signal Processor Subsystem and Structural/Thermal Subsystem. The Antenna/Drive/Calibration subsystem consists of a conical corrugated horn-fed shrouded reflector, multiplexer, closed-loop antenna scan drive assembly and closed path calibration assembly. The shrouded reflector is rotated once every scan line (8 s) for: 16)
• Each of 30 Earth viewing scene observations
• A view of the cosmic background (about 2.73 K)
• A view of a warm calibration load (about 300K)
During the rotation cycle, the shroud prevents solar reflections from interacting with the warm load and also ensures maximum coupling of the source radiation to the antenna feed. A complete end-to-end in-flight calibration is achieved in a through-the-antenna method, which provides maximum in-flight calibration accuracy. The accuracy of the warm calibration load brightness temperature is > ± 0.2 K. The closed loop antenna scan drive provides beam pointing accuracy within ± 0.2º. A resolver in the antenna drive assembly provides antenna beam position information.
The AMSU-A1 instrument has two 8 cm diameter antennas (reflectors without momentum compensation), each with a 3.3º nominal IFOV at the half power points (FWHM) providing a resolution of about 50 km at nadir. Each antenna provides a cross-track scan of ±48.33º from nadir with a total of 30 contiguous Earth views (stepped scan positions) per scan line. The total scan period is 8 seconds. The footprint (resolution) at nadir is 50 km. The swath width is approximately 2100 km. Channels 11 through 14 contain 4 pass bands each.
Sensor Unit | Channel No. | Center Frequency (GHz) | Bandwidth (MHz) | Sensitivity NEDT (K) | Polarization at Nadir |
AMSU-A2 | 1 | 23.8 | 280 | 0.3 | V |
AMSU-A1 | 3 | 50.300 | 180 | 0.4 | V H |
AMSU-B | 16 | 89.0 (2 bands) | 1000 | 0.37 | 90-θ |
AMSU-A2 has a single 17 cm diameter antenna (reflector with momentum compensation) with a 3.3º nominal IFOV. All other instrument/observation parameters are the same as for AMSU-A1.
AMSU-A utilizes an 8-second scan period with a step and settle scan across the Earth scene while AMSU-B utilizes an 8/3-second scan period with a constant speed scan across the Earth scene.
Parameter | AMSU-A1 | AMSU-A2 | AMSU-B |
Instrument size | 30 cm x 73 cm x 61 cm | 67 cm x 61 cm x 70 cm | 65 cm x 64 cm x 46 cm |
Instrument mass | 54 kg | 50 kg | 50 kg |
Instrument power | 75 W | 24 W | 90 W |
Data rate | 2.1 kbit/s | 1.1 kbit/s | 60 kbit/s |
Air temperature profiles | 3 mb (sea level) to 45 km | N/A | N/A |
Humidity profiles | N/A | N/A | 300 mb |
Spatial resolution | 3.3º (~50 km at nadir) | N/A | 16 km |
Swath width | 2100 km | N/A | 2100 km |
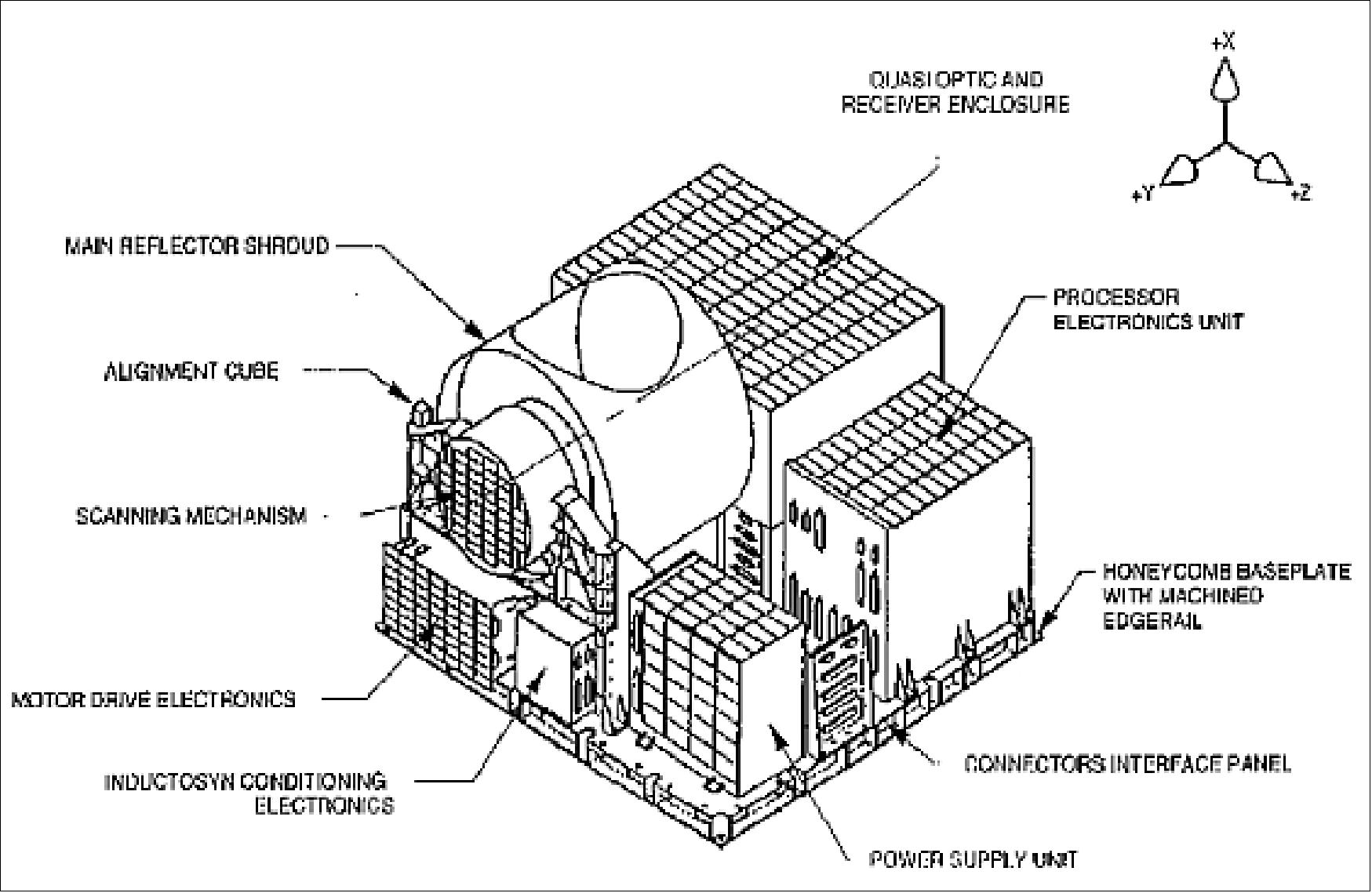
AMSU-B (Advanced Microwave Sounding Unit - B)
Three AMSU-B flight instruments are being built and provided to NOAA-K, -L and -M satellites by UKMO, Farnborough, PI: R. Saunders, AMSU-B is built by EADS-Astrium Ltd. (formerly MMS Bristol, UK). The objective is to obtain humidity profiles in five channels spanning the height range from the surface to about 42 km. AMSU-B covers channels 16 through 20. The highest channels: 18, 19 and 20 (see Table 11), span the strongly opaque water vapor absorption line at 183 GHz and provide data on the atmosphere's humidity level.
The AMSU-B instrument is designed as a scanning electro-optical sounder based on a rotating mirror platform. It consists of a scanning parabolic reflector antenna (30 cm diameter) which is rotated once every 8/3 seconds and focuses incoming radiation into a quasi-optic system which then separates the frequencies of interest into three separate feed horns of the receiver assembly. The receiver subsystem provides further demultiplexing of the 183 GHz signal in order to selectively acquire three defined double sided bands around the 183 GHz signal. The antenna provides a cross-track scan of ±48.95º (FOV) from nadir with a total of 90 Earth views per scan line. The instrument's IFOV is 1.1º and the separation between the center of one Earth view to the next is 1.1º. The total scan period is 8/3 seconds.
Internal calibration is performed with an internal warm load and cold space (space calibration = 80º from nadir). All channels have a spatial resolution of about 16.3 km at nadir (1.1º IFOV). The swath width is approximately 2200 km. Data rate = 4 kbit/s. The instrument mass is 60 kg, power = 90 W. AMSU-B ensures a twice daily full global coverage. AMSU-B employs the Schottky planar whiskerless diode technology in the mixer of the receiver. - AMSU-B is the first moisture sounder flown in the NOAA polar series. In addition to providing high-resolution atmospheric moisture profiles, AMSU-B is used to produce precipitation and surface products from two window channels.
MHS (Microwave Humidity Sounder)
MHS is an EUMETSAT instrument provided by the UKMO (UK Meteorological Office) and built by EADS-Astrium Ltd (UK). MHS is a five channel self-calibrating, total power, microwave scanning radiometer. The instrument is providing a humidity profiling capability in the frequency range of 89 - 190 GHz. The measured signals are also sensitive to a) liquid water in clouds (cloud liquid water content) and b) graupel and large water droplets in precipitating clouds (qualitative estimate of precipitation rate).
Channel | Center Frequency (GHz) | Max. Bandwidth (MHz) | Sensitivity (K) |
1 | 89.0 | 2800 | 1.0 |
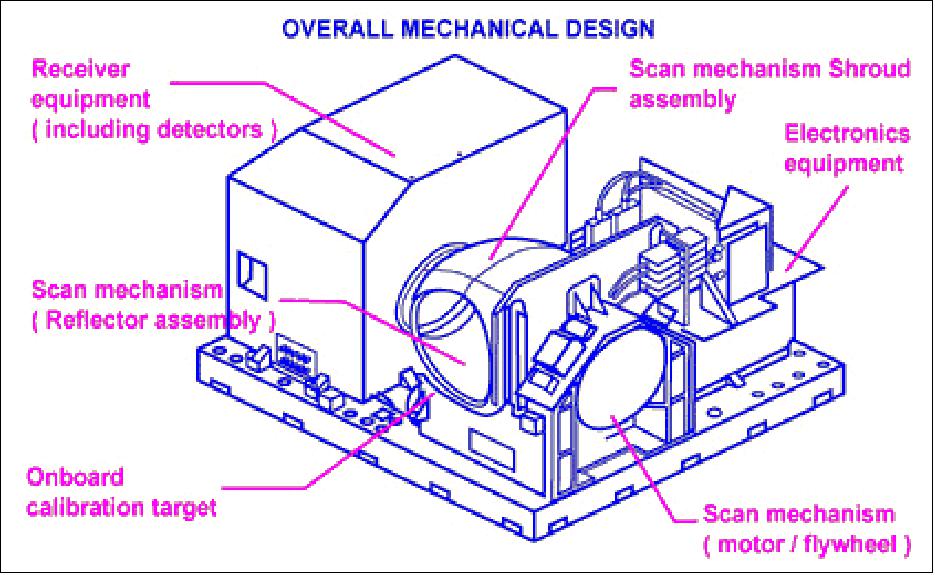
The MHS instrument receives broadband radiation (i.e. over a very wide frequency spectrum) from the Earth and its atmosphere. This radiation is reflected through approximately 90º and directed through an arrangement of quasi-optical lenses, dichroic (frequency splitting) plates and a polarizer. This ensures the correct frequency and polarization of the signals for each detector.
MHS scans in the cross-track direction at a rate of 8/3 seconds (2.67 s) in continuous mode. The instrument's IFOV is 1.1º and the separation between the center of one Earth view to the center of the next is exactly 10/9º (1.111º). The circular IFOV has a diameter at nadir of about 16.3 km. The observed swath width is ±1078 km. MHS technology used: advanced quasi-optics, planar millimetric frontends, precision calibration target, scan mechanism and reflector are combined with low power and mass electronics for minimum mass and power. Thermal control is passive and isolated from the spacecraft. Instrument mass = 63 kg, power = 74 W, data rate = 3.9 kbit/s.
The MHS contains four detectors, one per channel. The fifth channel is achieved by splitting the 183.311 GHz signal into two channels, each with a different bandwidth.
MHS calibration: Calibration data are taken in a similar way to the Earth view data samples. Data from both calibration sources are used during ground processing of the Earth view data. OBCT (Onboard Calibration Target) is a hot target comprising an array of RF (Radio Frequency) absorbent pyramids. OBCT is at ambient temperature (approx. 273 K) and scanned once during every reflector rotation. During each scan four data samples are taken. A cold reference data set is generated by sampling data when viewing deep space (approximately 4 K).
The MHS instrument replaces AMSU-B, it is being flown on the NOAA-N (NOAA-18) and NOAA-N' (NOAA-19) satellites, it is also flown on the MetOp-A spacecraft of EUMETSAT.
SBUV/2 (Solar Backscatter Ultraviolet Radiometer)
SBUV/2 was developed by Ball Aerospace, Boulder, CO. SBUV/2 is a further development of SBUV flown on Nimbus. The SBUV/2 is a non-scanning, nadir viewing instrument designed to measure scene radiance in the spectral region in 12 channels between 255 nm and 340 nm. Measurement of ozone profiles and of backscatter radiation. This sensor is used on PM and late AM missions [NOAA-17 (-M) is in a 10 AM descending sun-synchronous orbit. NOAA-16 is in a 2:00 PM ascending sun-synchronous orbit. NOAA-N and NOAA-N' are also being flown in a 2:00 PM orbit.]
ATOVS (Advanced TIROS Operational Vertical Sounder)
Sounder data are produced by a set of the instruments known as ATOVS, which are used to obtain information about the vertical profiles of temperature and humidity in the atmosphere. The ATOVS processing suite consists of data from the following instruments: HIRS/3, AMSU-A, AMSU-B, MHS, and AVHRR/3.
SEM-2 (Space Environment Monitor-2)
Starting with NOAA-K (NOAA-15, launch May, 13, 1998), NOAA/SEC added an improved SEM package, referred to as SEM-2 (developed by Panametrics). SEM-2 has added in-flight calibration capability and improved charged particle energy coverage. The TED measurement range is now from 0.05 keV to 20.0 keV in 16 energy bands. The energy coverage of the proton detector telescope portion of the MEPED is expanded to 6 energy bands, 30 keV to >6900 keV, and a fourth omnidirectional detector has been added to the MEPED to extend the energetic proton energy coverage to >140 MeV. 19)
SEM-2 is a multichannel, charged-particle spectrometer that measures the population of the Earth's radiation belts and the particle phenomena resulting from solar activity (both of which contribute to solar/terrestrial energy interchange). SEM-2 consists of separate sensor units and a common DPU (data processing unit). The sensor units are TED, MEPED, and HEPAD (occasionally). The lower-energy detectors (TED, plus the proton and electron telescopes of MEPED) have pairs of detectors with different orientations because the direction of the particle fluxes is important for characterizing the energy interchanges taking place. Objectives:
- To determine the energy deposited by solar particles in the upper atmosphere
- To provide a solar storm warning system. Large, abrupt changes occur in the solar wind. These changes produce changes in the magnetosphere and the ionosphere. This can result in hazards to people such as astronauts, there is also the potential of increased radiation exposure to people in high flying aircraft. Other functions/facilities on Earth effected by solar wind changes are: a) disruption of navigation, b) absorption, even blackout, of radio waves so that radio communication is disrupted; c) induced voltages and currents in electric power circuits leading to circuit breaker trip, damage to equipment, and failure of transformers; d) induced currents in buried pipe lines causing accelerated corrosion; e) damage by electrons and protons to satellite circuits and solar panels.
SEM-2 units | Performance requirements | Energy levels | FOV (Field of View) |
TED | Determine heat energy input into upper atmosphere from absorption of electrons, protons and positive ions. | Electrons: 0.05-20 keV | Two at 15º full angle, |
MEPED | Same as TED | Electrons: 30-7000 keV | 15º full angle, |
DPU | Combine outputs into a 2-second, 40-word format. Provide command, calibrate and timing interfaces. | N/A | N/A |
Instrument | Mass = 15 kg, power = 10 W, volume = 0.0186 m3, telemetry = two 8-bit words/TIP minor frame | ||
TED (Total Energy Detector). TED measures the proton and electron fluxes in 16 bands in the 0.05 to 20 keV energy range. Two independent measurements of the particle energy flux are made at zero and 30 degrees from the local vertical. The total energy measurement is divided into two ranges: 0.05 to 1 keV and 1 to 20 keV and each measurement is made independently for electrons and protons. TED also measures the maximum differential energy flux density and the energy at which it occurs for each direction and particle type (electron and proton). TED consists of eight Electrostatic Analyzers (ESA), pulse height discriminators (PHD), an In-Flight Calibrator (IFC), two high voltage (HV) supplies, a sweep voltage supply and housekeeping circuits. 20)
MEPED (Medium Energy Proton and Electron Detector). MEPED provides both directional and omni-directional measurements. The directional sensors utilize telescopes which make independent measurements of the particle types. Directional measurements are made near the local vertical and near 90º to the local vertical. Protons are measured in 6 bands in the energy range: 30 to >6900 keV. Electrons are measured in thee bands: >30 to > 300 keV. The omni-directional sensors measure proton energy in the following ranges: >16 MeV, >35 MeV, >70 MeV and >140 MeV. Each sensor consists of a dome of moderating material which absorbs energy from the particle (and so sets the detection energy threshold), a silicon solid state detector, a preamplifier, and a level comparator which responds to particles with enough energy to go through the moderator and produce a pulse from the detector large enough to exceed the level in the comparator.
The MEPED instrument consists of two proton telescopes, (each containing two solid state detectors (SSDs)), two electron telescopes (each containing a single solid state detector and four omni-directional sensors (each containing a single solid state detector), charge-sensitive preamplifiers, analog signal processors, proton and electron coincidence logic, in-flight calibrator, low-voltage regulators, SSD bias supply and analog housekeeping. The SEM-2 instrument package has a mass of 18 kg, power of 6 W, and a data rate of 166 bit/s.
Argos DCS on NOAA-POES Satellites
Argos Data Collection System (DCS) on NOAA spacecraft (provided by NOAA, France (CNES) and Canada, installed on all ATN family satellites since 1978; the first satellite equipped with Argos was TIROS-N.
The Argos/DCS supports NOAA in its overall environmental mission objectives, collecting (ground and space) truthing data. The concept uses many ground segment platforms (fixed and moving), i.e. buoys, free-floating balloons, and remote weather stations, and equips them with a Platform Transmitter Terminal (PTT) package. These PTTs collect and process relevant environmental data and transmit them to the NOAA-POES satellites. The on-board Argos DCS receives the incoming signal and measures both the frequency and relative time of occurrence of each transmission. The S/C retransmits these data via the CDA (Command and Data Acquisition) stations (one at Wallops Island VA, the other at Fairbanks, AK; there is in addition a downlink station (CMS) at Lannion, France, to a central processing facility. The DCS information is decommutated and sent to the Argos processing center where it is processed, distributed to the user community, and stored on magnetic tape for archival purposes.
Each Argos PTT transmits encoded messages at regular intervals on a 401.650 MHz uplink. Messages transmitted by the various platforms within satellite visibility are received and selected for processing on a random access basis. The satellite DCS computes the Doppler shift on the receive frequency and generates the Argos telemetry message which includes PTT identification, sensor data, measured frequency, and time and date of measurement. A small portion of the S/C downlink is reserved for Argos data. Each time a satellite is within visibility of one of the three receiving stations, it downlinks the recorded data.
Some Argos system characteristics:
• Minimum platform/satellite elevation angle of visibility: 5º
• Percentage of platforms with four Doppler measurements per day:>85%
• Measured location accuracy: 350 m
• Message capacity for sensor data: 32 to 256 bits
• Messages are of duration < 1 s and are transmitted at regular intervals by any PTT
• Uplink operational frequency: 401.650 MHz
• Typical power of PTT uplink: 200 mW at intervals of 90-15 seconds for location (drifting) PTTs and 200-300 seconds for data collection-only (fixed) platforms.
In 1988 an `Argos World Service' was introduced providing five times daily location reports on vehicles and freight carrying a standard transmitter. The NOAA Argos packages receive all messages within a 5000 km diameter visibility circle at any instant (footprint); four PTTs can be processed simultaneously by NOAA-1 to 12 (and up to J) S/C.
DCS-2: From NOAA-K onwards (satellites and its successors, there is a modified Argos data collection system referred to as DCS-2 (the predecessor of A-DCS). The data transmission rate for DCS-2 changed from 1200 bit/s to 2560 bit/s. The PTT capacity was increased from four to eight, this means eight DRU (Data Recovery Unit) on-board. The data are formatted and stored, then dumped each time the satellites moves within visibility of one of the three ground stations (Wallops, Gilmore Creek, or CMS). VHF and S-band transmitters also perform real-time relay (broadcast) for any user station within visibility.
For more information on the Argos system see the Argos DCS file on the eoPortal.
An advanced Argos system (A-DCS) having increased receiver sensitivity, higher platform data rates, and “forward” (S/C-to-platform) command transmission capability is planned for NOAA-N' (NOAA-19) and for the MetOp series.
S&RSAT (Search&Rescue Satellite Aided Tracking System)
The S&RSAT payloads are part of an international cooperative satellite-based radiolocation system (COSPAS-S&RSAT) to support search and rescue operations for aviators, mariners, and land travellers in distress. The S&RSAT payload consists of S&RR (S&RSAT Repeater), provided by CRC/Canada; and S&RP (S&RSAT Processor), provided by CNES/France).
Spacecraft Repeater (121.5, 243, and 406 MHz) | |
Bandwidths (Doppler shift + drift + Tolerance + guardband) | |
Parameter | Specification |
121.5 MHz | 25 kHz |
243 MHz | 46 kHz |
406.050 MHz | 100 kHz |
Transmitter power (1,544 MHz) | 8 W decibels referenced to a watt (dBW) |
Physical Characteristics | |
Mass, size, power | 24 kg, 0.034 m3, 53 W |
Spacecraft 406 MHz Processor | |
Max bandwidth, storage capacity, output data rate | 80 kHz, 324 kbit, 2.4 kbit/s |
Physical characteristics | |
Mass, size, power | 27.5 kg, 0.034 m3, 33 W |
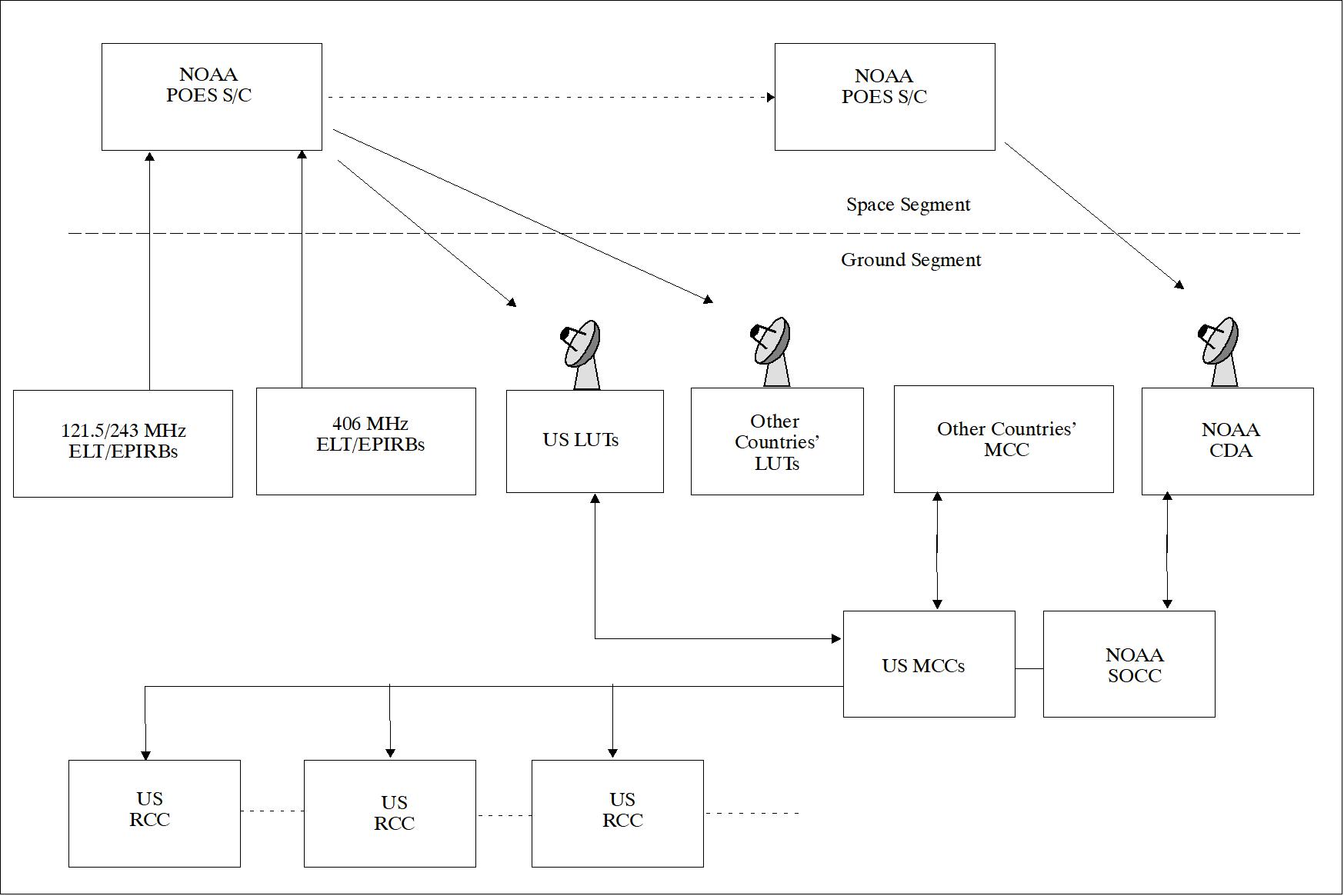
The S&RSAT system is designed to detect and locate Emergency Locator Transmitters (ELTs) and Emergency Position-Indicating Radio Beacons (EPIRBs) operating at 121.5, 243, and 406.05 MHz. The overall S&RSAT concept is illustrated in Figure 16 - consisting of S&RSAT ground stations, referred to as LUTs (Local User Terminals), and RCCs (Rescue Coordination Centers). The SAR instrumentation on the NOAA KLM satellites comprise two elements, the S&RR and the S&RP-2.
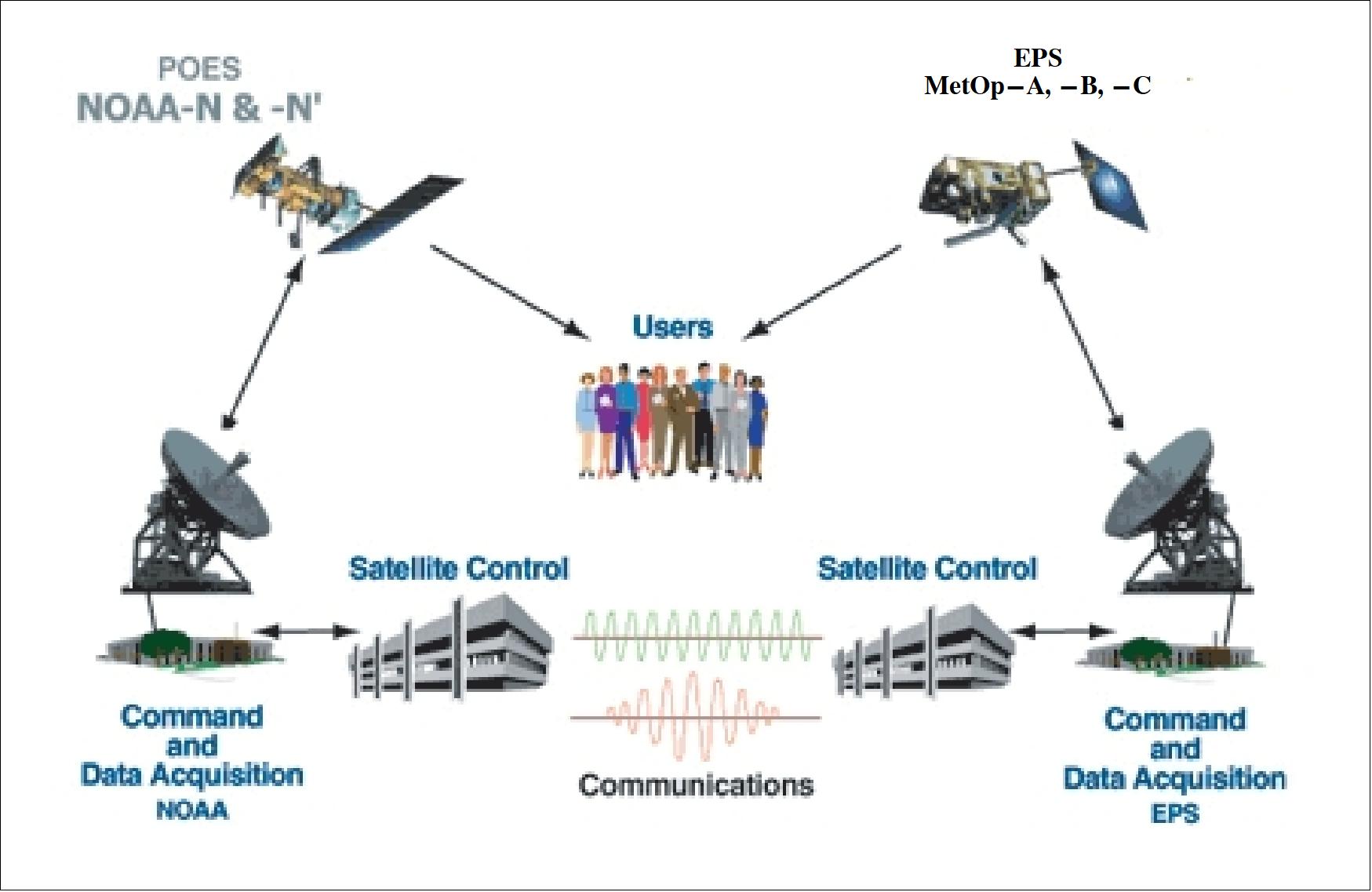
IJPS (Initial Joint Polar-orbiting System)
Since the early 1990s, NOAA and EUMETSAT have been discussing/planning future polar cooperation with increased European responsibility for the “morning orbit” to ensure continuity of the POES (Polar-orbiting Operational Environmental Satellites) services. The basic intent is to join the space segment of the emerging MetOp program of EUMETSAT with the existing POES program of NOAA into a fully coordinated service, thus sharing the costs of a program for synergetic reasons. The plans came to a common baseline and agreement, referred to as IJPS, in 1998.
Background: The NOAA 4th-generation polar program (ATN), which started in 1978 with the launch of TIROS-N, is based on the services of two operational satellites flying in complementary sun-synchronous orbits, one in a “morning or AM” orbit, and the second in an “afternoon or PM” orbit. It so turns out that the data from the PM mission is primary in the USA, with the AM mission providing supplementary and back-up coverage. In Europe the converse is true, with the AM mission providing the most timely coverage. 21) 22) 23) 24)
IJPS comprises two series of independent, but fully coordinated polar satellite systems, namely POES and MetOp, to provide for the continuous and timely collection and exchange of environmental data from space. EUMETSAT plans to include its satellites MetOp-A, -B and -C for the morning orbit, while NOAA is starting with its NOAA-N and N' spacecraft for the afternoon orbit of the coordinated system.
The launch of NOAA-N (NOAA-18) took place on May 20, 2005, of MetOp-A on Oct. 19, 2006, and of NOAA- N' (NOAA-19) on Feb. 6, 2009.
Instruments: Each IJPS satellite series carries a common set of instruments and additional instruments specific for each orbit. The common set of instruments (morning and afternoon orbits) include: AVHRR/3, HIRS/4, AMSU-A (A1+A2), MHS, Argos/A-DCS, S&RSAT with instruments including S&RR (CRC, Canada)+S&PR-3 (CNES), and SEM-2. The MHS instrument is provided by EUMETSAT for the NOAA and MetOp series. It replaces the AMSU-B in the POES series instrument baseline. As part of the acquisition activities for NOAA satellites, NOAA will also provide all common instrument sets for MetOp satellites (MHS and Argos/A-DCS excepted).
The MetOp series specific instruments (in addition to the common set) are:
• IASI (Infrared Atmospheric Sounding Interferometer)
• ASCAT (Advanced Scatterometer)
• GRAS (GNNS Receiver for Atmospheric Sounding)
• GOME-2 (Global Ozone Monitoring Experiment-2)
The NOAA series specific instrument (in addition to the common set) is:
• SBUV/3 (Solar Backscatter Ultraviolet Radiometer)
NOAA-N and NOAA-N' | MetOp-A and MetOp-B |
Orbit at 14:00 MLST (Mean Local Solar Time) on ascending node | Orbit at 9:30 MLST on descending node |
S-band spacecraft in command and control | S-band spacecraft in command and control |
Direct broadcast with existing HRPT and analog APT links | Direct broadcast with advanced HRPT and digital LRPT links |
Common instrument suite plus additional instruments | Common instrument suite plus additional instruments |
EUMETSAT data transmission services:
MetOp satellites provide the service of direct broadcasts using LRPT (Low Resolution Picture Transmission) and HRPT (High Resolution Picture Transmission) with selective virtual channel encryption capability for LRPT and HRPT data. EUMETSAT has adopted CCSDS (Consultative Committee on Space Data Systems) packet telemetry standards for LRPT and HRPT transmissions. The MetOp series will also use an X-band downlink for instrument data dumps from the on-board solid-state recorder.
NOAA data transmission services:
NOAA satellites will use APT (Automatic Picture Transmission) and HRPT direct broadcast services as implemented in the POES system.
IJPS satellite operations
IJPS satellite operations are implemented separately by EUMETSAT and NOAA with the provision of backup/cross-support capabilities for each other in the ground segment. The global data set is shared. Each ground segment provides for S/C control, command and data acquisition, data processing, distribution, and archiving capabilities. Each agency is in full control of its S/C and ground segment operations.
References
1) http://www.nasa.gov/pdf/111742main_noaa_n_booklet.pdf
2) M. Mignogno, “NOAA Polar Program Plans for Continuous Satellite Coverage,” Proceedings of the 1999 EUMETSAT Meteorological Satellite Data User's Conference, Copenhagen, Denmark, Sept. 6-10, 1999, pp. 11-15
3) NOAA Polar Operational Environmental Satellites (POES), Series K/L/M (NOAA-M)
4) In NOAA terminology, TIP (TIROS Information Processor) data refers to low-rate instrument data multiplexed with satellite housekeeping data. It contains all environmental instrument information except that from the AVHRR and the AMSU.
5) Jeff Foust, ”Decommissioned NOAA weather satellite breaks up,” SpaceNews, 20 March 2021, URL: https://spacenews.com/decommissioned-noaa-weather-satellite-breaks-up/
6) ”NOAA-15 Makes 100 Thousandth Orbit,” NOAA/NESDIS, Aug. 10, 2017, URL: https://www.nesdis.noaa.gov/content/noaa-15-makes-100-thousandth-orbit
7) ”POES Operational Status,” April 16, 2016, URL: http://www.ospo.noaa.gov/Operations/POES/status.html
8) “Ten years ago, on 20 May 2005, the first Microwave Humidity Sounder (MHS) instrument was launched into orbit on board the NOAA-18 satellite,” EUMETSAT, May 20, 2015
9) “POES Operational Status,” NOAA, Sept. 30, 2014, URL: http://www.ospo.noaa.gov/Operations/POES/status.html
10) NOAA KLM User's Guide, Instrument Payload (General Descriptions)
11) CEOS Summary Report, WGD-10 Meeting, Annapolis MD, April 16-18, 1991
12) Information provided by G. A. Mandt of NOAA POES Program, “AVHRR/3 Instrument Technical Overview,” March 15, 1995 of ITT A/CD
13) D. Rosenfeld, E. Cattani, S. Melani, V. Levizzani, “Consideration on Daylight Operation of 1.6- versus 3.7-µm Channel on NOAA and MetOp Satellites,” BAMS (Bulletin of the American Meteorological Society), Vol. 85, No 6, June 2004, pp. 873-881
14) NOAA KLM User's Guide
15) P. M. Taylor, B. A. Banks, “An overview of the NOAA/NESDIS data processing systems and derived products for NOAA-KLM,” Earth System Monitor, Vol. 8, No. 4, June 1998, pp. 7-11
16) NOAA KLM User's Guide
17) Note: The polarization angle is defined as the angle from horizontal polarization (i.e., electric field vector parallel to satellite track) where is the scan angle from nadir. In this table, the polarization angle is horizontal when the angle indicated is θ and vertical when 90-θ
18) “MHS Instrument flying onboard NOAA-18,” EUM/OPS/TEN/05/2282, Sept, 16, 2005
19) D. S. Evans, M. S. Greer, “Polar Orbiting Environmental Satellite Space Environment Monitor - 2, Instrument Descriptions and Archive Data Documentation,”
20) D. S. Evans, M. S. Greer, “Polar Orbiting Environmental Satellite, Space Environment Monitor-2, Instrument Descriptions and Archive Data Documentation,” NOAA Technical Memorandum, Jan. 2004, version 1.4
21) M. Mignogno, M, Langevin, “Cooperation in Polar Orbiting Environmental Satellites: NOAA and EUMETSAT Joint Plans for the next Decade,” Proceedings of Information for Sustainability, 27th International Symposium on Remote Sensing of Environment, Tromsoe, Norway, June 8-12, 1998, pp. 555-559
22) A. F. Durham, “Future Polar Satellite Program Plan for Global Environmental Observations,” IAF 92-0083, 43rd Congress of the International Astronautical Federation, Aug. 28-Sept. 5, 1992 Washington, D. C.
23) Bruce H. Needham, “Instrumentation and Services for the NOAA Polar-Orbiting Operational Environmental Satellites (POES) in the 21st Century,” NOAA/NESDIS, Office of System Development, Washington D.C., `90
24) “Pre-Phase-A Study of NOAA O, P, Q Spacecraft and Ground Segment LRPT and HRPT Data Handling and Transmission Subsystems” Draft Final Report, Oct. 16, 1990, Atlantic Research Corp. prepared for NASA/GSFC
25) M. Mignogno, “POES Program Status,” Satellite Direct Readout Conference for the Americas, December 9-13, 2002, Miami, FLA, URL: http://noaasis.noaa.gov/NOAASIS/pubs/MIAMI/mignogno_p.ppt
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Sensor Complement - NOAA-15 Mission Status Sensor Complement - POES References Back to top