NorSat-1 and 2
EO
Atmosphere
Radiation budget
Earth radiation budget radiometers
Launched in July 2017, NorSat-1 is a microsatellite mission of the Norwegian Space Centre (NSC) that aims to investigate solar radiation and space weather, as well as develop new methods for the detection and management of ship traffic. NorSat-2 is the second installation of the microsatellite series, also launched in July 2017, and aims to provide additional, advanced ship tracking and Very High Frequency (VHF) Data Exchange (VDE) services.
Quick facts
Overview
| Mission type | EO |
| Agency | NOSA |
| Mission status | Operational (extended) |
| Launch date | 14 Jul 2017 |
| Measurement domain | Atmosphere, Gravity and Magnetic Fields |
| Measurement category | Radiation budget, Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Downwelling (Incoming) solar radiation at TOA, Electron density profile, Total electron content (TEC) |
| Instruments | AIS, CLARA, m-NLP, VDES |
| Instrument type | Earth radiation budget radiometers, Space environment, Communications |
| CEOS EO Handbook | See NorSat-1 and 2 summary |

Summary
Mission Capabilities
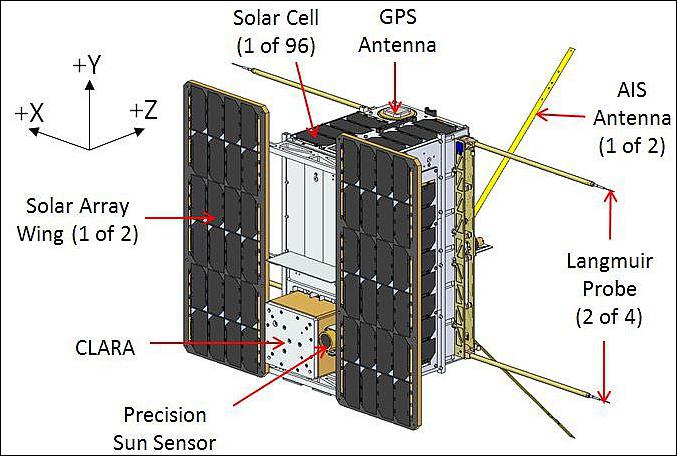
NorSat-1 carries three instruments: the Compact Lightweight Absolute Radiometer (CLARA), the multi-needle Langmuir Probe (m-NLP) and the Novel SAT-AIS Receiver (NAIS). Whereas NorSat-2 only carries NAIS. CLARA is a Total Solar Irradiation (TSI) instrument manufactured by the PMOD (Physikalisch-Meteorologisches Observatorium Davos) World Radiation Centre in Davos Switzerland, that aims to provide TSI data for applications in absolute radiometry validation, climate science, space weather and helioseismology. m-NLP is the secondary payload for the NorSat-1 mission, and has been manufactured by the University of Oslo with the objective of measuring plasma around Earth at a higher resolution than previous Langmuir probe instruments. NAIS is a line-of-sight, self-organised, time division multiple-access messaging system that aims to detect and track maritime activity in both Norwegian and international waters.
Perfomance Specifications
CLARA has dimensions 114 mm x 141 mm x 155 mm, with a mass of 2.63 kg, with a measuring cadence of 30 s. m-LNP has four Langmuir probes, with coverage of a density range from 108 - 1013 particles/m3. NAIS uses two orthogonal VHF antennas, each approximately 0.5 m in length.
Space and Hardware Components
NorSat-1 and -2 use an identical NEMO (Nanosatellite for Earth Monitoring and Observation) bus, manufactured by the University of Toronto Institute for Aerospace Studies (UTIAS) Space Flight Laboratory (SFL). The satellite bus houses the Thermal Control Subsystem (TCS), Attitude Determination and Control Subsystem (ADCS), Command and Data Handling (C&DH) subsystem, the RF communications subsystems and the Electrical Power Subsystem (EPS). The bus has dimensions 440 mm x 200 mm x 267 mm, with an uplink capacity of 4 kbit/s, and a downlink capacity of up to 4 Mbit/s. NorSat-2 has an additional payload, the VHF Data Exchange System (VDES), a newly developed data communication system that supports terrestrial communications between ships and shore-based ground stations. VDES uses an 8 dBi crossed Yagi antenna to minimise transmit power and DC consumption, and to increase sensitivity.
NorSat-1 and NorSat-2 microsatellites
Spacecraft Sensor Complement NorSat-2 Launch Mission Status References
The NSC (Norwegian Space Center) selected the NorSat-1 mission, an affordable approach to science in space, as part of the National Space Program. NorSat-1 has two objectives: 1) investigating solar radiation and space weather and 2) the development of new methods for detection and management of ship traffic. - The experience with the launch and operation of the low cost satellite AISSat-1, launched on July 10th 2010, has been most successful. Three years of continuous operation of AISSat-1 has resulted in a new understanding of maritime traffic, particularly in the High North. This demonstration has also shown that a low cost platform may be utilized for other missions. 1)
In June 2013, the NSC signed a contract with UTIAS/SFL (University of Toronto Institute for Aerospace Studies/Space Flight Laboratory) for the development of Norway's first science satellite, NorSat-1. In a small ceremony at the Norwegian Space Center in Oslo, the Managing Director of the Space Flight Laboratory, Dr. Robert E. Zee, signed the contract in the presence of the Canadian Ambassador to Norway, David Sproule. 2) 3) 4)
NorSat-1 will carry both, a next generation AIS transponder and scientific instruments. The new satellite will be built to investigate solar radiation, space weather and detect ship traffic. Initially named NorSat-1, the launch is planned for 2015 or early 2016. The NSC will coordinate the development and the integration of the instruments for the new platform. The instruments will cover several aspects of scientific research focusing on the sun, including measuring TSI (Total Solar Irradiation) with one instrument, and measuring electron plasma from the sun with a LP (Langmuir Probe).
Spacecraft
NorSat-1 is based on SFL's next-generation satellite bus, which offers fine attitude control, high power generation, and high downlink rates. This next generation bus—referred to as the NEMO platform—straddles the border between a nanosatellite and a small microsatellite, and represents the next evolution in microsatellite miniaturization. NorSat-1 will use the same system architecture and technologies developed for the NEMO-AM mission (aerosol monitoring mission for the Indian Space Research Organization) and NEMO-HD mission (high-definition Earth observation for Slovenian Space-SI), which are themselves based on SFL's space-proven and highly successful GNB (Generic Nanosatellite Bus), currently flying in the AISSat-1 mission for Norway, recently-launched UniBRITE and BRITE-Austria, and which is the basis for more than 10 other missions, currently under development. SFL has the experience and technology to deliver a high-quality mission for NorSat-1 at a reasonable cost. 5) 6)
NorSat-1 will provide ample power generation to operate all spacecraft payloads continuously, while maintaining sub-degree (±0.4°) attitude control, average telemetry downlink rates exceeding 1 Mbit/s, and a benign thermal environment for payloads and bus electronics. NorSat-1 has ample on-board data processing and storage capabilities, with greater than 20 orbits worth of payload data and bus telemetry storable by OBCs (On-Board Computers). NorSat-1 will achieve these capabilities with a total launch mass (including separation system) of < 30 kg.
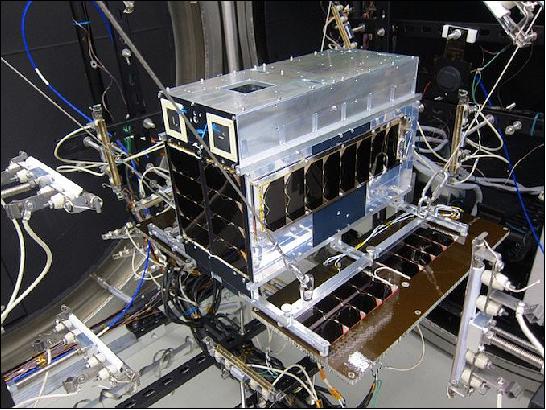
Structure: The spacecraft structure comprises of all of the physical components needed to properly house the satellite avionics, payloads, and any other necessary equipment, and keep them safe through all expected environments. It is comprised of a heritage design concept from the GNB, utilizing two intricately designed loadbearing aluminum trays, housing much of the avionics, enclosed by six aluminum body panels. The design builds on the design methodology of the GNB nanosatellite, whereby two trays are used to mount large and/or massive components (e.g. reaction wheels, batteries, radios, etc.). The satellite is then enclosed using metallic panels onto which solar cells or other light deployable/pre-deployed components can be attached; these panels also provide a degree of additional structural support.
TCS (Thermal Control Subsystem): The TCS design is passive. The techniques used involve controlling the overall bus temperature using various thermal control tapes on the outside of the spacecraft, as well as controlling the internal component temperatures through materials selection and specific mounting methods. This type of implementation allows for a low-risk and robust satellite thermal design. In addition to these passive techniques used, an active heater is present in the battery pack in order to ensure the battery cells are kept above their minimum charging temperature (0°C).
ADCS (Attitude Determination and Control Subsystem): Attitude sensing is provided by six SFL-designed sun sensors, along with a three-axis magnetometer to determine the local magnetic field. A three-axis rate-sensor is also incorporated to provide additional attitude information when in eclipse. Three-axis control of the satellite is achieved using three orthogonally mounted reaction wheels and magnetorquers. A dedicated on-board computer is present on the satellite to operate the necessary attitude algorithms. The satellite with the above mentioned attitude hardware, is capable of achieving pointing within ±5°. With the addition of a precision sun sensor mounted directly on the CLARA instrument, NorSat-1 can achieve a fine pointing mode, enabling pointing within ± 0.5º (mean plus 3σ) while the sun is visible. Additionally, a GPS receiver is included to provide positioning and timing data, as well as support the payload activities.

C&DH (Command and Data Handling) subsystem: Three identical SFL designed on-board computers comprise the C&DH subsystem on NorSat-1. These on-board computers are heritage designs from previous SFL missions, and represent highly mature hardware and associated software for controlling all of the spacecraft functions, as well as communications. The HKC (Housekeeping Computer) is typically dedicated to performing housekeeping tasks on the spacecraft, such as collecting regular telemetry from each component. The ADCC Attitude Determination and Control Computer) is dedicated to performing attitude and determination related processing, such as reading the necessary attitude sensors and issuing commands to the attitude actuators. The third computer on board is the POBC (Payload On-Board Computer), dedicated to interfacing with the payloads; the SIB (Serial Interface Board) is also considered a portion of this computer.
RF communications: The TT&C (Telemetry Tracking and Command) subsystem provides a full-duplex, bidirectional radio communications system between the satellite and the Earth station. It incorporates a two-radio system: a UHF receiver for uplink communications, and an S-band transmitter for the downlink. The uplink UHF receiver is supplemented with a cavity bandpass filter to provide rejection of the spacecraft's transmitter emissions, a down-converter that provides frequency translation between S-band and ultra-high frequencies (UHF), and a UHF receiver that includes demodulation, bit synchronization, and descrambling functionality. Both of these radios are heritage designs used on previous SFL missions, and utilize a dual-patch antenna system, with the antennas for each link located on opposite sides of the spacecraft; a total of four S-band patch antennas are used for this, providing close-to omnidirectional coverage.
EPS (Electrical Power Subsystem): EPS has three main functions: power generation, energy storage, and power distribution. Power generation is done by means of externally mounted triple junction solar cells, grouped in eight-cell strings, with a beginning of life efficiency of roughly 28%. The solar cells are mounted on the satellite such that at least one string is visible in each of the six primary directions, to allow for safe-hold power generation in any state. The main sunward facing side of the satellite, however, has a total of six strings of solar cells for additional power generation during payload activities. A total of 96 solar cells exist on NorSat-1, capable of over 40 W of power generation.
Energy storage is done by means of a three-series, two-parallel lithium-ion battery pack, with an integrated BIM (Battery Interface Module). The BIM provides battery cell protection, and provides the battery telemetry that operates the battery heater. - Power distribution on the spacecraft is achieved through an in-house developed MPS (Modular Power System). It is comprised of a passive backplane, on which multiple µSPN (Micro Switched Power Node) cards are connected - each load on the spacecraft is connected to an individual switch. A 5 V supply, SABR (Solar Array/Battery Regulator), SABIN (Solar Array/Bus Interface Node), and IFN (Interface Node) card are also mounted onto this backplane to provide the remaining functionalities to the power system.
Development Status
• July 13, 2015: The NSC (Norwegian Space Center) awarded a contract to UTIAS/SFL to built NorSat-2. 7)
• July 9, 2015: Two NAIS (Novel SAT-AIS) receivers, built by Kongsberg Seatex, were delivered to the Norwegian Space Center to be added to the NorSat-1 satellite for launch in 2016. Thedevelopment of the NAIS receivers started in Feb. 2014. The delivery of the flight models to the customer in just 16 months is a major achievement for the Kongsberg and ESA project team. The NAIS receiver development was supported by ESA's ARTES (Advanced Research in Telecommunications Systems) program. 8)
Satellite mass | 15.6 kg |
Spacecraft dimensions | 440 mm x 200 mm x 267 mm (central bus) |
Power generation | Up to 45 W |
Data storage | 3 GB |
Uplink | 4 kbit/s (command) |
Downlink | Up to 4 Mbit/s (telemetry & data) |
Pointing control | 0.5º (3σ) |
Power generation | 6 fixed solar panels, 28% triple-junction cells |
Power system | Battery-regulated bus: series peak power tracking (PPT) topology |
Battery | 6-cell Li-Ion, 9.6 Ahr capacity |
Communications | Omni-directional S-band uplink and downlink |
Attitude determination | 3-axis; sun sensors, rate sensor, magnetometer |
Attitude control | 3-axis; reaction wheels, magnetorquers |
Position determination | NORAD TLEs, GPS receiver |
C&DH (Command and Data Handling) | 2 computers for housekeeping, attitude control |
Orbit | 600 km SSO (Sun Synchronous Orbit) |
Ground segment | Earth station location: Vardø, Norway (70 °N) |
NorSat-1 Sensor Complement
NorSat-1 is a collaborative mission the payloads will be developed, tested and delivered by three organizations (Ref. 6):
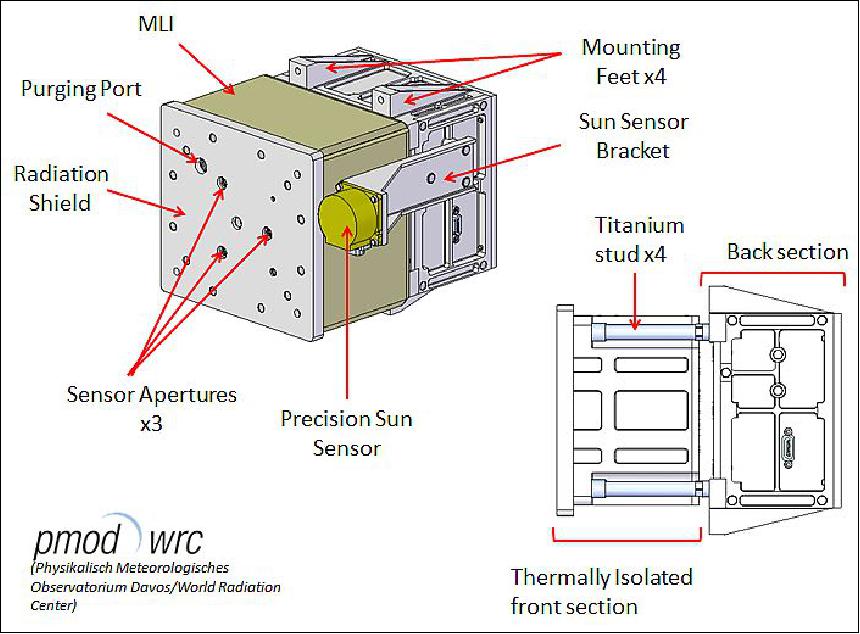
1) The TSI (Total Solar Irradiation) instrument, called CLARA (Compact Lightweight Radiometer), is made by PMOD (Physikalisch-Meteorologisches Observatorium Davos) World Radiation Center in Davos Switzerland.
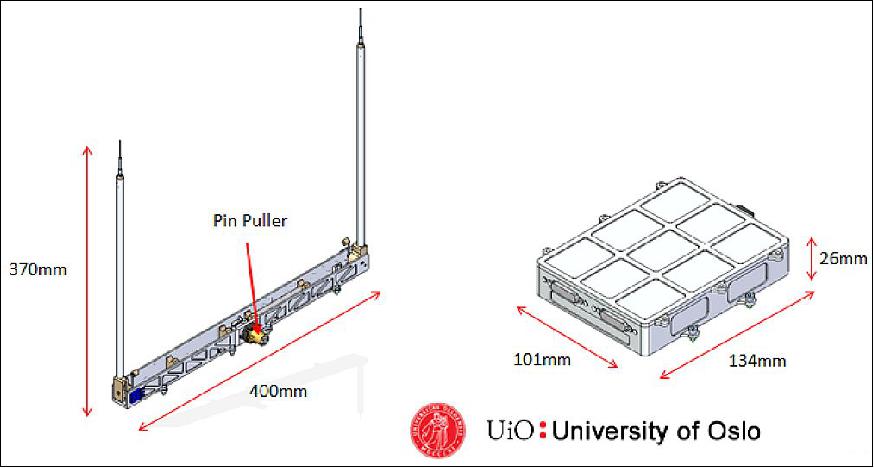
2) The m-NLP (multi-Needle Langmuir Probe), providing measurements of space plasma density, is made by the UiO (University of Oslo), Norway.
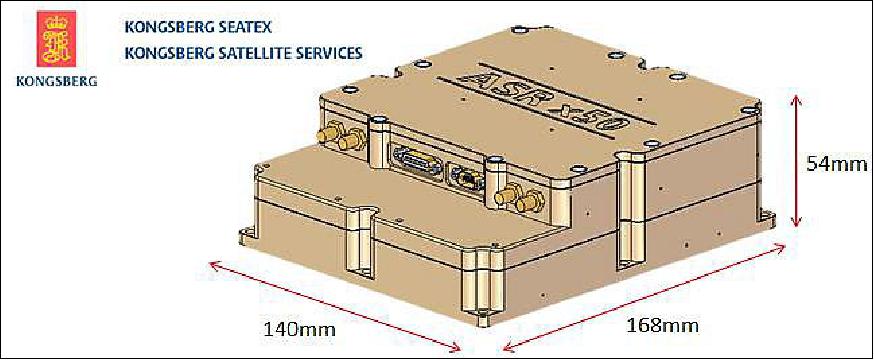
3) The AIS receiver, called NAIS (Novel SAT-AIS Receiver), is made by KSX (Kongsberg Seatex), Trondheim, Norway.
CLARA (Compact Lightweight Absolute Radiometer)
CLARA is a scientific instrument that will be used to determine the total solar irradiance of the Sun. This instrument is the primary payload in the NorSat-1 mission and will take operational precedence over the other payloads. The CLARA instrument contains measurement cavities that must be exposed, unshadowed, and must be pointed at the Sun with ±0.5º, 3σ, to carry out its scientific measurements. These cavities must also be held at a constant temperature, with a maximum drift of 0.1º C/ hour, while the measurements are being taken.
PMOD/WRC (Physikalisch-Meteorologisches Observatorium Davos / World Radiation Center) of Switzerland is building the CLARA (Compact and Lightweight Absolute RAdiometer) to fly on the NorSat-1 mission of NSC (Norwegian Space Center). CLARA is being designed as compact and lightweight as possible in order to maximize its flight opportunity on a multi-payload satellite such as NorSat-1. CLARA has four main science objectives: 9) 10) 11)
• Absolute Radiometry Validation: CLARA will allow for validation of laboratory results in space that provide an explanation for some discrepancies measured by PMO6-, DIARAD-, and ACRIM-type radiometers compared to the American TIM/SORCE experiment.
• Space Weather: Through successfully modeling the TSI variations, correlations to the UV (Ultra Violet) radiation variations can also be made. Thus, the long-term stability of UV variations can also be assessed.
• Climate Research: Large amounts of evidence suggest that TSI (Total Solar Irradiance) has an influence on the Earth's climate. CLARA aims to extend the TSI data record for solar atmosphere and climate modelers through monitoring the TSI variations with great accuracy and sensitivity. Continuous monitoring of the TSI levels is needed in order to reduce uncertainties, and cover the 11-year solar cycle.
• Helioseismology: CLARA will be the highest-cadence radiometer in space to-date, allowing the assessment of the TSI variability at very high frequencies. The higher frequency of measurements allows for helioseismology investigations of the solar atmosphere in order to assess the acoustic energy carried into the solar atmosphere by high frequency sound waves.
Instrument design: The CLARA instrument is separated into two separate aluminum enclosures, connected together via four large titanium studs, and a couple of wires to transfer the measurement data. The thermally isolated section contains the sensitive measurement components, and is wrapped with a MLI (Multi Layer Insulation) blanket to further the thermal isolation. To minimize any mechanical and thermal pointing misalignments between the sun sensor and the CLARA apertures, the precision sun sensor is directly mounted on the payload via a dedicated bracket, extending from the rear, "less thermally sensitive", half.
Dimensions | 114 mm x 141 mm x 155 mm |
Mass | 2.63 kg |
Power consumption | 5.6 W |
Measuring cadence | 30 s |

m-NLP (multi-Needle Langmuir Probe)
The Langmuir probe instrument is the secondary payload for the NorSat-1 mission. This instrument will measure the plasma around the Earth at a higher resolution compared to other Langmuir probe instruments that have been flown in space. This instrument, developed by UiO (University of Oslo), uses four probes that are held at different electrical potentials outside of the bus, and measures the electrical characteristics of the plasma near the spacecraft as the bus moves through the plasma around the Earth. Most other Langmuir probe instruments use a probe that sweeps through different voltages, but due to the time it takes for this sweep and the high velocities of orbiting satellites, spatial resolutions of these measurements tend to be on the order of one kilometer. Since the probes in this mission are held at constant voltages, sampling rates are much higher and give spatial resolutions of the measurements on the order of one meter. These probes must be held outside of the plasma sheath that forms around the bus as it goes through its orbit, which places constraints on the orientation of the probes relative to the orbit.
The instrument is a new concept Langmuir Probe capable of high-resolution measurements of space plasma density, and can cover the density range from 108-1013 particles/m3. The system consists of two or more cylindrical needle probes, and is therefore referred to as UiO's m-NLP (multi-Needle Langmuir Probe). A key feature of the m-NLP technique is the ability to determine the electron density without the need to know the spacecraft potential and electron temperature.
One of the main design challenges of the Langmuir Probe system aboard NorSat-1 is getting the probe tips in an area of undisturbed space plasma. As the spacecraft is in orbit, it creates a ‘plasma wake' in the opposite direction of travel. Because this "plasma wake" is poorly understood and hard to predict, the probe tips are placed on long protruding booms, in an effort to place the tips as far out into the undisturbed plasma as possible. In doing this, the booms become quite long, quickly increase in complexity, and increase the launch volume of the spacecraft quite significantly. To minimize this, the probes must be made deployable. Having to have a deployment system carries its own set of challenges and requirements as well, such as the necessity of ground handling equipment and testing methods.
A second design challenge that the m-NLP carries is the need to have sufficient conductive surface area (coupled to the spacecraft chassis reference ground) available on each side of the spacecraft in order to "close" the measurement circuit. As the probe tips collect high-mobility electrons from the space plasma, the spacecraft will inevitably charge up, and could potentially begin to repel incoming electrons if a sufficient charge is achieved. The conductive surface area on the spacecraft sides provide a path for the less mobile ions to hit the spacecraft in the direction of velocity, in order to offset the spacecraft charge build-up. The required surface area is made as a spacecraft requirement, and is simply verified by inspection.
A third design challenge is that the probe tips must be free of contaminations that could impact the measurements. For example, finger oils can create an insulating layer on the probe, and would reduce electrons flow through the probes and affect the resulting measurements. A reliable mitigation plan for this concern is thus required for the design, such as protective covers, replacement tips, or repeated cleaning.
m-NLP design: The Langmuir Probe tips are placed on large deployable booms, whose overall size is limited to the length of the spacecraft itself. Two identical Langmuir Probe cassettes are included on NorSat-1, each housing two Langmuir Probes. The booms are held down by a uniquely designed mechanism that, through spring preloads, forces the booms to stay stowed. Using a commercial shape memory alloy pin-puller, the pre-loaded spring mechanism can be released on orbit, allowing it to perform a half-turn, and consequently push both booms out with a large enough force to reach their fully deployed positions. Once fully deployed, each of the booms is able to lock in place via a locking pin. The cassette design is shown in Figure 8; also depicted is the electronics box that accompanies the cassettes on the spacecraft.
NAIS (Novel Sat-AIS Receiver)
Kongsberg Seatex of Norway is designing the AIS receiver instrument. The NAIS receiver, also referred to as ASRx50 receiver, will detect and track maritime traffic in Norwegian and international waters via AIS (Automatic Identification System). The AIS system is a line-of-sight, self-organized, time division multiple-access messaging system that provides situational awareness to a large number of maritime vessels at sea. It allows the exchange of information such as ship identification, position, course and speed, allowing governmental organizations to monitor and direct the ship traffic. Mandated by the IMO (International Maritime Organization), all vessels over 300 gross tons are obligated to carry and operate the AIS system. Monitoring and collecting AIS data from space has proven to be effective, and of great interest to the Norwegian government, due to the large portions of open water that is currently impossible to monitor via coast-based AIS stations.
The AIS instrument assembly consists of a dual antenna VHF (Very High Frequency) receiver supporting four VHF channels each. The technology of the receiver is similar to the previous AIS receivers, designed as the main payloads on previous SFL satellites, such as AISSat-1, which was launched on July 12, 2010, as well as AISSat-2, launched on July 8, 2014. This new AIS receiver will be more advanced and will have the opportunity to test out new detection algorithms. The motivation for ship detection via AIS is fairly clear and proven from previous AIS missions, in that detection from space allows for a more complete picture of the activity in the waters and can better prevent ship collisions. The objective of NorSat-1 is to complement to the on-going capability of the Norwegian government of space-based AIS systems. The AIS receiver payload is the sole non-science payload aboard the NorSat-1 mission.
Design challenges: Two main challenges exist with the AIS payload. First, because of the low frequency of operation (VHF), the antennas have to be quite large relative to the overall spacecraft size. On previous SFL designed AIS satellites, single pre-deployed antennas were used, however, since NorSat-1 intends to use two orthogonal antennas, the volume that the antennas consume would be significant. Because of this, similar to the Langmuir Probe instrument, the antennas must be made deployable. In reducing the launch volume of the satellite, the amount of launch vehicles able to accommodate the spacecraft increases considerably.
The second main design challenge associated with the AIS payload is that the receiver is highly sensitive to electromagnetic radiation at its frequency of operation (VHF). At this relatively low frequency, it is not uncommon that many electronics generate noise, and could easily interfere with the payloads data collection. As such, a fairly strict requirement on platform generated noise to the AIS payload is placed on the spacecraft design.
NAIS design: The overall dimensions of the AIS receiver payload are shown below in Figure 6. The total mass of the instrument is about 1.5 kg.
VHF antennas: UTIAS/SFL and NSC (Norwegian Space Center) have collaborated on a number of AIS satellites. Numerous previous satellites on-orbit of the GNB size, including AISSat-1 and AISSat-2, use a single pre-deployed VHF antenna. The pre-deployed method being favored because of the reduction of risk over deployable components (i.e. a deployable component always has a single point of failure – if it does not deploy properly).
In the case of NorSat-1, however, two orthogonal antennas are required, rendering the volume consumed by pre-deployed antennas to be significantly larger. The added volume by two orthogonal antennas, of each ~50 cm length, would restrict the number of potential launch opportunities, and would place additional constraints on the launch vehicle in order to accommodate the satellite. Because of this, deployable antennas were favored over pre-deployed for the two VHF antennas on NorSat-1.
The design of the deployable AIS antennas is derived from a previous SFL designed AIS antenna used on the GNB. Tape spring antennas are used, they are wrapped around the satellite and held down at the top +Y face by a spherical tooling ball attached directly to the XPOD (Experimental Push Out Deployer). Upon release, the antennas deploy themselves by using their own stored energy. This technique can be seen in Figure 10, which shows the satellite installed in the vertically mounted XPOD-Duo.

In light of some of the conclusions from the research done using the tape springs, each tape spring is mounted differently, such that when wrapped together their curved sides are concentric and can rest together. The concave side of the tape spring is faced towards the satellite to avoid accidental contact to the spacecraft (this is the stiffer direction), to allow the tape springs to wrap in their favorable direction, and be stiffer at the hold down point; as explained in the research section above. Minimum bending radii are limited to 7 mm to avoid any damage to the antennas during stowage (Ref. 6).
NorSat-2 (Advanced Ship Tracking and VDE (VHF Data Exchange))
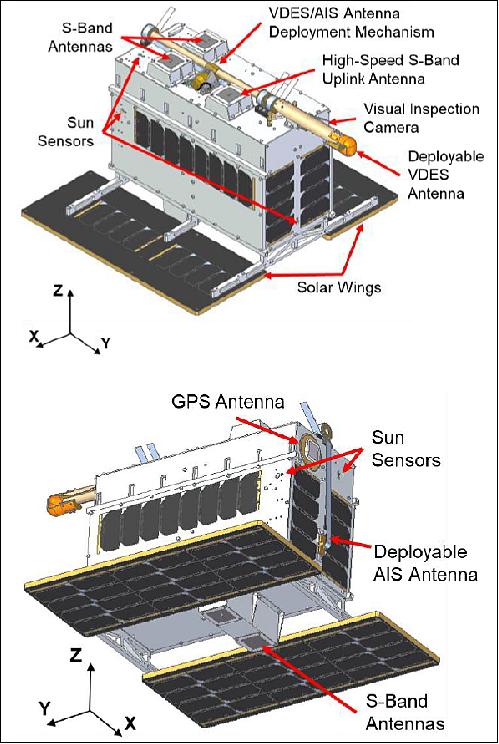
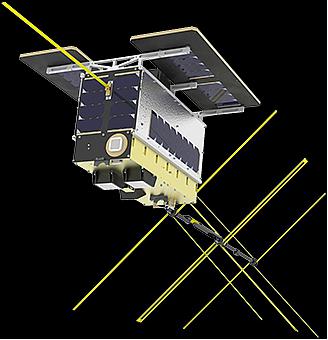
NorSat-2 is the fifth satellite to be constructed UTIAS/SFL for Norway. The Norwegian Space Center (NSC) and Space Norway are leveraging the development of NorSat-1 to enable this mission for advanced ship tracking and VHF data exchange. The NorSat-2 satellite will carry a next generation AIS (Automatic Identification System) receiver from Kongsberg Seatex, along with a VDE (VHF Data Exchange) payload that will enable two-way communication at higher data rates than possible with AIS. One of the key challenges is to fit a directional VHF antenna on a small microsatellite, with NorSat-2 being only 15 kg and roughly 20 x30 x40 cm in dimensions (not including solar wings). SFL has developed a deployable crossed Yagi antenna for the satellite that allows for compact stowage during launch and simple release after ejection from the launch vehicle (Figures 12 and 13). SFL is also providing a high-speed S-band feeder uplink for the satellite, in addition to an S-band system for telemetry and command. 12) 13)
NorSat-2 mechanical design: The primary structure is built around a robust dual-tray concept which supports all subsystem components in a layout that facilitates rapid and flexible integration and testing. The satellite is fully enclosed by structural panels that provide support for attitude sensors and actuators, as well as solar cells, radio communications antennas, and other components. The structural subsystem is depicted in Figure 11.
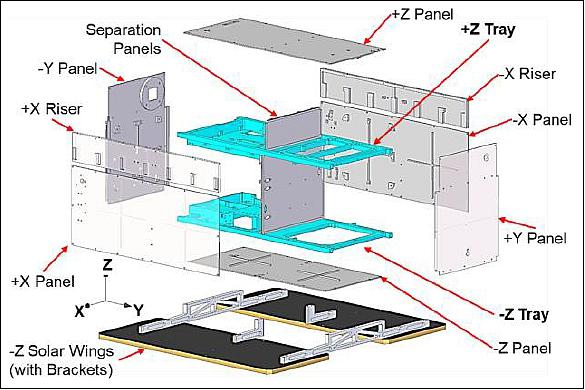
The two trays provide the primary load path between the satellite and its deployment system, SFL's XPOD (eXoadaptable PyrOless Deployer) Duo. When compared to other deployers operating on the same principle, the unique design of the XPOD Duo reveals one of its chief advantages: it provides the microsatellite with two unconstrained faces to expand outside of the deployer's volume, making the NEMO platform highly adaptable to a large variety of missions and payloads. In the case of NorSat-2, this flexibility enables two of the most noticeable features of this microsatellite, its two pre-deployed solar wings and its stowed VDES (VHF Data Exchange System) antenna.
C&DH (Command and Data Handling) subsystem: NORSAT-2 has three onboard computers, designated as a HKC (Housekeeping Computer), an ADCC (Attitude Determination and Control Computer), and a POBC (Payload Computer), each of which performs a distinct role. The HKC is responsible for basic housekeeping tasks such as regular collection of spacecraft telemetry, dispatch of commands, and managing radio communication. The ADCC is responsible for providing control over attitude hardware power switches and running attitude determination and control algorithms. The POBC is responsible for the control of the payloads, specifically the VDES, AIS and imager payloads, and interfacing with the S-band feeder uplink for bulk data and command reception.
Commanding can be done in realtime or via time-tag. Time-tagged commands allow for autonomous operations to occur outside of Earth station passes as they can be dispatched to a respective unit or software thread at a specified time. This functionality permits continuous AIS and VDES operations around the globe, even when realtime commanding is not possible.
EPS (Electrical Power Subsystem) supports the overall objective of NorSat-2 by providing a continuous and reliable power supply to the spacecraft using a series peak power tracking topology called MPS (Modular Power System). The functionality of the MPS is divided into interchangeable cards located on a passive backplane. The system is capable of producing 48 W of generated solar power and can store approximately 108 Wh using a single 3s2p Lithium ion battery. There is one body-mounted 8-cell solar string on each of the X and Y satellite faces, and two pre-deployed solar wings, containing a total of 64 solar cells (16 cells on the +Z side and 48 cells on the –Z side). The cells used are GaInP/GaAs/Ge triple junction solar cells with an efficiency of 30%. Each cell is 40 x 80 cm in size and is equipped with an integrated bypass diode.
When not executing operations with the VDES payload, the satellite remains in a maximum power generation attitude with the –Z satellite face sun pointing. This allows for continuous AIS operations and duty-cycled VDES operations in important areas of interest around Norway and around the globe.
TT&C (Telemetry and Command): S-band is used for both uplink and downlink on NorSat-2. In addition to the regular telemetry and command uplink and downlink system, NorSat-2 also has an enhanced S-band feeder uplink. - The telemetry and command S-band uplink consists of a combiner, a band pass filter, a downconverter, and a UHF receiver. The S-band uplink forms the method with which commands are sent to the spacecraft for all mission functions, and therefore must be active at all times. Two patch antennas bonded on the +Z and –Z spacecraft faces are used to provide omnidirectional coverage.
The downlink is controlled by a custom-designed S-band transmitter from COTS components. Its data rate and modulation can be scaled on-the-fly from 32 kbit/s to 2048 kbit/s. Scaling is automatically executed by ground software as the link with the Earth station improves and deteriorates throughout the pass. The antenna system used for the downlink on NorSat-2 is an omnidirectional pair of patch antennas bonded to opposing satellite faces.
The high speed S-band feeder uplink is another custom-designed board capable of achieving uplink speeds of up to 1 Mbit/s. The purpose of including the separate feeder uplink is to support VDES operations. It is intended to allow the upload of large waveform files to the VDES payload. The S-band feeder uplink has a single patch antenna, bonded to the +Z face of the satellite.
ADCS (Attitude Determination and Control Subsystem): The attitude determination sensors are comprised of a three-axis magnetometer, six fine sun sensors, and a three-axis rate sensor, which are all designed and built at UTIAS/SFL. Actuation is provided by three orthogonal reaction wheels and three orthogonal vacuum-core magnetorquers. The reaction wheels are used for fine pointing control and the magnetorquers are used mainly for reaction wheel desaturation. A GPS receiver is also present onboard for orbital position knowledge and precise timing.
The ADCS can operate in a number of control modes: Safe, Passive, B-dot, Wheel Momentum Control, and Three-Axis Control. Three-Axis Control is the primary operational attitude throughout the course of the mission and can be used in several useful sub-modes, including the previously mentioned limb pointing and ground target tracking. Ground target tracking is used for passes over the Earth station. In this mode, the spacecraft tracks a static target on the ground with a specified body axis while a second body axis is constrained to a second desired axis.
Momentum management is performed in parallel with active control tasks and can be enabled or disabled by an operator as needed. The desired spacecraft inertial angular momentum is entered as a setpoint, and the magnetorquers are actuated to regulate the wheel speeds while simultaneously holding the desired attitude.
Bus and antenna manufacturer | UTIAS/SFL |
Polar orbit (SSO) | 600 km altitude |
Attitude control | 3 axis stabilized |
Solar power generation | 56 W peak |
Spacecraft mass | 16.7 kg |
Satellite body size | 20 x 30 x 40 cm |
Mass of AIS payload | 1.3 kg |
Mass of VDES instrument | 1.5 kg |
Mass of antenna | 0.3 kg |
VDES transmit duty cycle | 10% of orbit, adjustable |
VDES receive band | 157.1875-157.3375 MHz |
VDES transmit RF power | 1 W linear (28 dB C/I3) |
VDES transmit band | 161.7875-161.9375 MHz |
Feeder link | S-band, 1 Mbit/s in both directions |
Payload technology | Software Defined Radio (initial software is Arbitrary Waveform Generator) |
Yagi antenna size | 800 x 975 mm |
Peak antenna gain | 8.0 dBi |
AIS payload manufacturer | Kongsberg Seatex |
VDES payload manufacturer | Kongsberg Seatex |
Satellite owner | NSC (Norwegian Space Center) |
AIS payload user | Norwegian Coastal Authority |
VDES payload owner | Space Norway |
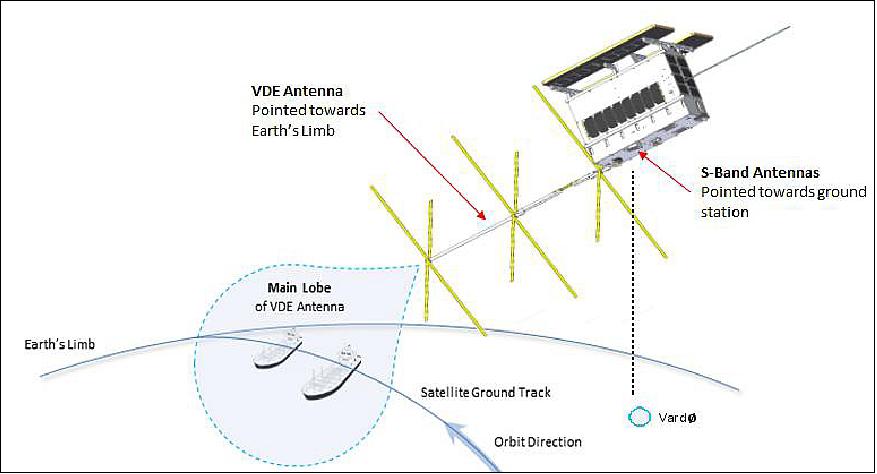
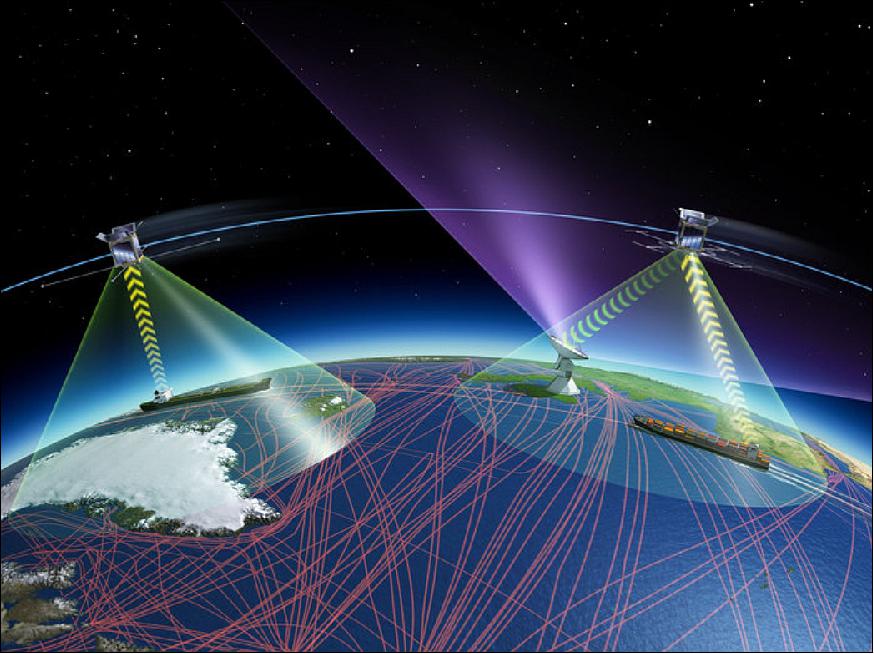
NorSat-2 is intended to have several modes of operation, which are sun-pointing, limb-pointing within the orbit plane, and limb-pointing above a ground target. Limb pointing is done in order to optimize VDES and AIS operations, whereas sun-pointing is done in order to optimize power generation. One of the operational VDES modes is depicted in Figure 14.
NorSat-2 Sensor Complement
NAIS (Novel Sat-AIS Receiver)
One of the payloads onboard NorSat-2 is an advanced Kongsberg Seatex NAIS receiver (Figure 9), which operates across the maritime frequency band from 156 MHz to 163 MHz. The NAIS antenna is a deployable tape-measure VHF monopole design that is held down along with the Yagi-Uda antenna during launch.
VDES (VHF Data Exchange System)
The maritime industry is digitizing most aspects of ship operation and the coastal administrations are developing a new data communications system called VDES. ITU released the first version of this standard ITU-R M.2092-0 in 2015. VDES supports terrestrial communications between ships and to stations near shore, whilst satellite communications is envisaged far from shore and particularly in the Arctic regions outside geostationary satellite coverage.
NorSat-2 has an experimental two-way software defined VDES transceiver and will be used to develop propagation models and to demonstrate wide-area services such as Arctic ice chart distribution and notices to mariners. Two-way electronic navigation services (eNAV) are envisaged later when the standard is fully defined.
It is expected that future ship VDES transceivers will be combined with AIS into a single piece of equipment. This will have cost and installation benefits as hardware and antennas can, at times, be shared dynamically.
NorSat-2 uses an 8 dBi crossed Yagi antenna to minimize transmit power (and DC consumption) and to increase sensitivity. A typical mode for NORSAT-2 would be to point the antenna to a specific service area, such as NavArea XIX which is Norway's responsibility. The antenna is pointed by rotating the satellite dynamically during a pass.
VDES supports store-and-forward services, hence a LEO satellite would typically provide around 10 minutes of access time every 95 minutes around the Svalbard islands. Multiple satellites would reduce latency and provide redundancy.
VDES (VHF Data Exchange System) is needed to meet the growing demand for data exchange by providing additional capacity that is not available from existing AIS systems. While AIS provides for identification and position reporting/tracking of maritime vessels, VDES integrates AIS with ASM (Application Specific Messages), which are new channels with more capacity and better reliability of message delivery. Adding VDE satellite services effectively increases the range of ship to shore and ship to ship communication beyond direct line of sight. NorSat-2 will be one of the first satellites with this capability (Figure 14).
Deployable VDES antenna overview: The VDES antenna is a high gain, directional, folded dipole Yagi-Uda antenna with three elements in crossed configuration. It operates in the VHF maritime band, and its phase quadrature feed scheme allows it to produce circular polarization. At 62 x 62 x 73 cm overall dimensions, its deployed geometry exceeds the total size of the NorSat-2 satellite body. Figure 13 shows the NorSat-2 configuration with the VDES and AIS antennas deployed.
The deployable concept was adopted early in the design cycle, after a trade study that included a pre-deployed version of the same antenna as well as variations of helical and loop Yagi antennas.
The ability to stow the antenna for launch enables a substantially lighter design that can nonetheless meet structural strength and stiffness requirements. In addition, the launch volume of the satellite is minimized, increasing compatibility with several launch vehicles and mounting configurations. The stowed VDES antenna configuration (Figure 12, top ) integrates a hold-down mechanism for NorSat-2's monopole AIS antenna as well.
VDES antenna mechanical design validation and performance verification: The flight configuration of the VDES antenna was validated through a thorough test campaign involving radio-frequency (RF) performance testing, deployment testing, and environmental testing. Each test was conducted according to SFL standards and the results verified with regards to both internal and customer requirements. The successful completion of the test campaign ensures that the VDES antenna will perform as desired in orbit with a high degree of confidence.
Pattern and EIRP testing: Pattern testing of the VDES antenna was conducted with the goal of verifying the gain and polarization performance of the deployable design in relation to simulation results and customer specifications. The test was conducted coarsely in an early design phase to verify the prototype's performance, and with finer precision on the flight model; the results demonstrated a performance that met or exceeded nominal gain requirements at both the receive and transmit frequencies for all spacecraft orientations. An example of the pattern results is presented in Figure 15.
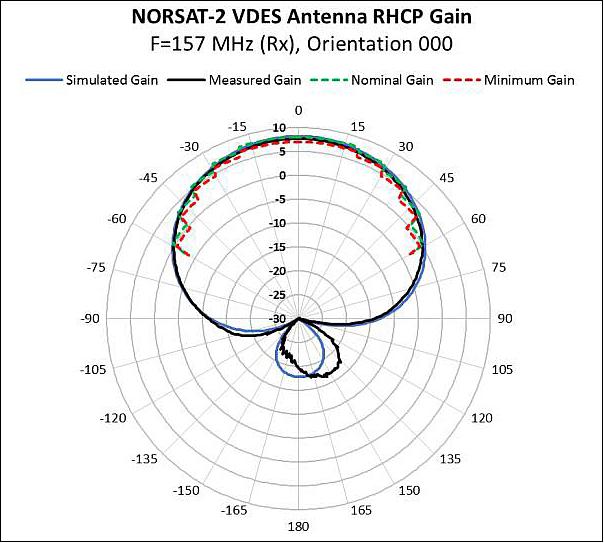
Additionally, the maximum variation in the EIRP (Equivalent Isotropic Radiated Power) of the payload was measured for a nominal boresight orientation between the VDES antenna and a ground receiver, as well as at orientations with offsets in elevation and azimuth of up to 30°. The results confirmed the proper functioning of the VDES antenna transmission mode.
Qualification vibration testing: Due to the considerable differences between the VDES antenna and previous deployable structures designed by SFL, the antenna was subjected to a full unit-level qualification vibration test, including sinusoidal vibration tests, random vibration tests and shock tests in all three axes. Following these tests, it was observed that the pre-load applied to each of the antenna coils had been maintained, and the antenna's structural integrity was verified. Additionally, following integration with the flight spacecraft, the antenna was subjected to acceptance-level loads during the spacecraft acceptance vibration campaign.
Qualification thermal vacuum testing: Further environmental testing was performed on the flight VDES design in SFL's TVAC (Thermal Vacuum) chamber. Full unit-level qualification thermal cycling was conducted on two antennas simultaneously, with one unit being deployed at the hot operational temperature (+60°C), and the other at cold (-20°C). The test confirmed the deployment mechanism's functionality at both temperature extremes, as well as the antenna's structural integrity and stable electrical connectivity in both a stowed and deployed state across the expected operational temperatures.
Deployment testing: Deployment testing was conducted at regular intervals throughout the antenna design phases in order to verify that the antenna would reliably release, unfold, and stabilize to its fully deployed state. These tests were conducted prior to and following any design adjustments or qualification tests in order to reveal any changes in either the deployment dynamics or the functionality of the deployment mechanism.
Initial testing was conducted in atmosphere, while further deployment testing on the flight configuration was conducted in vacuum. These later tests exposed and helped characterize effects resulting from the absence of air friction compared to the first stages of atmosphere testing: faster deployment of the individual coiled elements and generally more energetic motions, along with slower overall stabilization from the stowed state to the stationary, fully deployed state. Generally, the deployment consists of two phases, one approximately two seconds in duration in which a rapid and ample transition to deployed shape takes place, followed by the second phase of approximately 30 seconds duration of small oscillation damping. Figure 17 displays the deployed VDES antenna following a test in SFL's TVAC chamber.

Additionally, multiple consecutive deployments were conducted to verify consistency in the antenna's deployment behavior as well as its final stabilized state. Prior to flight, a total of over 100 deployments were conducted with the antenna prototype, qualification model and flight model over the course of the antenna's development.
Launch
The launch of NorSat-1 from French Guiana has been cancelled by Arianespace in agreement with NSC (Norwegian Space Center) and UTIAS/SFL. The cancellation is due to an incompatibility between the satellite and the launcher supporting structure provided by Arianespace.- Both the satellite and XPOD were ready for launch, but the bracket provided by Arianespace was not properly designed. It was concluded that it is unsafe to proceed with the launch with the current bracket structure. 15)

Launch: The NorSat-1 and NorSat-2 secondary payloads were launched on July 14, 2017 (06:36:49 UTC, 09:36:49 Moscow time) on a Soyuz-2.1a / Fregat -M vehicle from the Baikonur Cosmodrome, Kazakhstan. The primary payload on this flight was Kanopus-V-IK 1. 16) 17) 18) 19) 20)
Orbit: Injection of the primary payload and smallsats into 3 different orbits. Such flexibility can't be found in any other launch system in the world. The NorSat-1 and -2 orbital altitude is 600 km. — Over the 8+ hour mission, a total of 72 commercial and university smallsats will be injected into three unique orbits, with the subsequent de-orbiting of the booster.
Secondary payloads: In total, 72 secondary satellites will be launched on the Kanopus-V-IK 1 mission, including spacecraft for four separate commercial remote sensing and weather constellations.
Glavkosmos, a subsidiary of Russian state space corporation Roscosmos, is seeking to become a larger provider of rideshare launch services for small satellites. In addition to this upcoming launch, Glavkosmos is planning to fly about 40 more small satellites on two Soyuz missions from the new Vostochny Cosmodrome in Russia's Far East region late this year, with additional launch opportunities planned for 2018 and beyond.
In addition, the German Orbital Systems company of Berlin, ECM Space Technologies GmbH, actively participates in the launch, by supplying a DCSM (Deployment Control and Separation Sequence Management) unit. Integration of two secondary satellites built in Germany, three from Russia and 12 from the USA. GlavKosmos subcontracted this task to ECM. 21)
• Forty-eight (48) Dove satellites (Flock 2k) of Planet will be launched into an SSO of 475 km altitude. 22) Planet of San Francisco is the biggest single customer for the upcoming launch. This "flock" of 48 satellites will go into a sun-synchronous orbit, but one slightly different from those of 88 similar satellites launched on an Indian Polar Satellite Launch Vehicle in February. Those satellites went into a sun-synchronous orbit that crosses the equator at 9:30 hours local time. The new satellites will launch into an orbit that crosses the equator at about 11:00 hours local time.
• Spire Global of San Francisco, which is deploying a fleet of CubeSats to collect GPS radio occultation and ship tracking data, has eight (8) of its Lemur CubeSats on this launch.
• GeoOptics of Pasadena, CA, is flying its three CICERO 6U CubeSats (CICERO-1, -2,- 3), designed to collect GPS radio occultation data to support weather forecasting.
• Flying Laptop, a minisatellite (120 kg) of IRS (Institute of Space Systems), University of Stuttgart, Germany.
• WNISAT- 1R (Weather News Inc. Satellite 1R), a microsatellite (43 kg) for north arctic routes and atmosphere monitoring. The project is started from the commercial objects between Weathernews and Axelspace, Japan. The object of the WNISAT-1R mission is monitoring of the Northern sea routes and of the CO2 content of the atmosphere. 23)
• NorSat-1 and NorSat-2 of the Norwegian Space Center, built by UTIAS/SFL on GNB (Generic Nanosatellite Bus). The NORSAT-2 satellite, with a mass of 16 kg, will carry a next generation Automatic Identification System (AIS) receiver from Kongsberg Seatex, along with a VDE (VHF Data Exchange) payload that will enable two-way communication at higher data rates than possible with AIS. NorSat-1 (< 30 kg) carries three instruments: An AIS receiver, a Langmuir Probe Instrument, and CLARA (Compact Lightweight Absolute Radiometer), intended to observe total solar irradiation and variations over time.
• TechnoSat is a nanosatellite project (18 kg) of the Technical University of Berlin. Test of new nanosatellite components, including a camera, a new reaction wheel system, a star tracker, a transmitter, a fluid dynamic actuator, and commercial laser retro-reflectors.
• Corvus-BC 1 and Corvus-BC 2: Astro Digital, formerly known as Aquila Space, (formed from the core team of the former Dauria Space daughter Canopus Systems) developed the Corvus-BC Earth observation CubeSats (6U, 10 kg).
• MKA-N 1, 2: Two Earth observation CubeSats (6U, 10 kg each) of Roskosmos, built by Dauria Aerospace.
• NanoACE, a technology demonstrator by Tyvak Nanosatellite Systems, Inc. (Irvine, CA) to validate the Endeavor suite technologies that will be used for future missions and is solely for the purpose of internal Tyvak development as an attitude control experiment. A 3U CubeSat (5.2 kg).
• Mayak: A Russian 3U CubeSat (4kg) developed by a group of young scientists named "Your sector of space" with support of the Moscow State University of Mechanical Engineering (MSUME). In orbit, the 3U CubeSat will deploy four triangular reflectors, 4 m2 each, which form a tetrahedral shape. The reflectors are made from metalized membrane with reflection coefficient of 95%. The reflector will provide a -10 optical magnitude at the beginning of the flight to allow for easy tracking. Mayak will be put into a tumbling motion over all axes, with at least 1 revolution per second.
• Iskra-MAI-85, a CubeSat of the Moscow Aviation Institute. 24)
• Ecuador-UTE-YuZGU, a CubeSat of the Kursk South-Western State University, Russia.
Overview of the Kanopus-V-IK timeline- 09:36:49 – launch vehicle lift-off;
- 09:38:46 – 1st stage separation;
- 09:41:36 – 2nd stage separation;
- 09:41:38 – fairing jettison;
- 09:45:37 – head module separation;
- 09:45:42 – 09:52:18 – Fregat upper stage flight to a transfer orbit;
- 10:35:01 – 10:36:27 – Fregat upper stage flight to the Kanopus-V-IK separation orbit;
- 10:38:07 – Kanopus-V-IK separation (orbit i=97.44°; H = 522.5km; h = 478.6km);
- 11:13:29 – 11:14:35 – Fregat upper stage flight to the second transfer orbit;
- 11:58:29 – 11:59:35 – Fregat upper stage flight to the separation orbit of a group of smallsats;
- 12:01:43 – 12:05:03 – Phase 1. Separation of 5 smallsats (orbits i=97.61°; H = 601.5-600.1km; h = 600.0-590.1km);
- 12:10:03 – 12:26:43 – Phase 2. Separation of 19 smallsats (orbits i=97.62-97.61°; H = 601.0-606.9km; h = 580.1-587.4km);
- 12:51:49 – 12:53:15 – Fregat upper stage flight to the third transfer orbit;
- 13:34:39 – 13:35:51 – Fregat upper stage flight to the separation orbit of a group of smallsats;
- 17:18:23 – 17:41:17 – Separation of 48 smallsats (orbits i=97.00-97.01°; H = 485.0-477.4km; h = 482.2-450.5km);
- 17:51:49 – 17:53:45 – Fregat upper stage flight to reentry orbit;
- ~18:18:49 – Fregat upper stage reentry (altitude – 100 km), sinking in the Indian Ocean.
Mission Status
• October 2018: When launched in 2017, NorSat-1 became Norway's first multi-payload microsatellite with two scientific payloads in addition to a more advanced AIS receiver: the TSI (Total Solar Irradiation) instrument CLARA developed by Physikalisch Meteorologisches Observatorium Davos and World Radiation Center (PMOD/WRC) and the m-NLP (multi-Needle Langmuir Probe) to study ambient space plasma characteristics, provided by the University of Oslo (UiO). 25)
- The NorSat-1 spacecraft is a high-performance microsatellite enabling continuous and simultaneous operation of its three payloads, each with their own particular and often potentially conflicting set of requirements and constraints. Continuous on-orbit operation of all three payloads is enabled by 45 W power generation in sunlight, while sub-degree attitude control has been achieved with low-cost sensors and actuators, outperforming pointing requirements needed to satisfy scientific objectives. The downlink chain achieves a data rate of at least 1 Mbit/s when averaged over the accumulated contact time over a 24-hour period, and is able to deliver more than 490 MB of data per day to a high latitude station in Vardø, Norway.
- A second multi-payload satellite, NorSat-2, was launched together with NorSat-1. In addition to AIS, it carries a VHF Data Exchange System (VDES) transceiver which, together with a deployable 8 dBi Yagi antenna, makes up the VDE-SAT payload. The functional system design of the VDES transceiver was done by Space Norway, while the detailed design and manufacturing was implemented and is operated by Space Norway AS, partly under ESA funding.
- VDES was proposed to address indications that the VHF Data Link (VDL) of AIS was being overloaded and to enhance data exchange for e-navigation. The ITU Radiocommunication Sector (ITU-R) released the first version of this standard, ITU-R M.2092-0, in 2015. The mission demonstrates the feasibility of a VHF data exchange protocol via satellite to ships, which could eventually lead to a new way of transmitting high priority information such as weather data, navigational routes, and sea ice predictions.
- The VDES antenna is a high gain, directional, folded dipole Yagi-Uda antenna with three elements in crossed configuration. It operates in the VHF maritime band, and its phase quadrature feed scheme allows it to produce circular polarization. At 62 x62 x 73 cm overall dimensions, its deployed geometry exceeds the total size of the NorSat-2 satellite body.
- All auxiliary payloads on NorSat-1 and -2 have been working well and successfully provide experimental data to their owners.
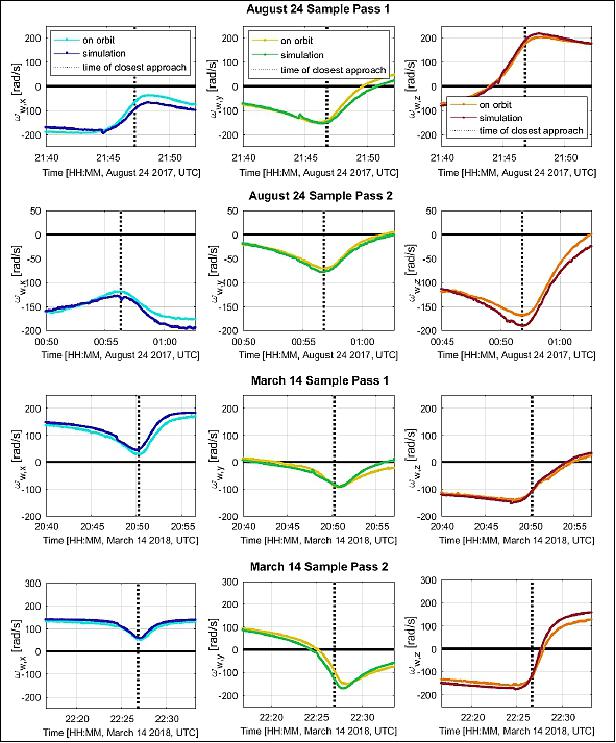
• August 2018: The NorSat-2 mission is currently operating on-orbit, and was used to test the momentum planning functionality of 3TECS (Target Tracking Trajectories for Exclusion Constrained Spacecraft). The target tracking trajectory planning portion of 3TECS requires additional on-board software, and will be tested on-orbit once a satellite with this newer software is launched, and is thus out of the scope of this paper. The test was performed twice, once on August 24th, 2017, and once on March 14th, 2018. Each test consisted of six passes. Operator inputs were passed to 3TECS for the given passes, following the architecture described III. The time-tagged commands with the momentum setpoints were then uploaded to the spacecraft, and executed. 26)
- Figure 19 shows the on-orbit reaction wheel speed data for 2 representative passes from each test. For comparison, the on-orbit data is plotted against the wheel speeds that were expected based on simulation. Overall, the observed behavior was in strong agreement with expectation. The on-orbit reaction wheel speeds closely followed the simulated profiles, and achieved more-or less the same level of zero-crossing performance. It was found, in general, that there was about 5-10% error in the spacecraft's actual momentum setpoint going into a target tracking pass, with respect to what was desired. There is a fundamental issue in the momentum management control due to the well-documented problem of instantaneous under-actuation using magnetorquers. The torque applied from magnetorquers is always orthogonal to the local magnetic field vector, and thus we instantaneously lack the ability to apply torque (and regulate our momentum) about that direction. Additional sources of error include the inertial body momentum estimation error, the magnetic field estimation error, and the magnetorquer actuation error. In the worst-case, this error caused the zero-crossing to be shifted by about a minute, reducing the objective function value from 234 s to 175 s. This is visible in the ω ϖ, y plot for August 24, sample pass 1 (top-row center plot in Figure 19).
- In summary, there exists a need for more sophisticated planning of the target tracking constraint vectors to allow for fine pointing with a single star tracker across a wide range of targets. In addition, there is a common problem of reaction wheel stiction near the zero angular velocity point causing jitter. Star tracker availability results demonstrated that with 3TECS, across all examined orbits, it was possible to achieve > 98:7% availability, while tracking any target visible below the horizon, well surpassing the 95% goal. In turn, this high availability allows for high pointing accuracy; across the detailed simulations performed, pointing accuracy was observed to be better than 0:15º (2σ), well in compliance with the 0:55º (2σ) requirement. On the momentum setpoint planning side, simulation indicated that the 3TECS planner could allow for windows of no wheel zero-crossing of 164 s or longer for the cases studied, well above the 90 s target, and well outperforming the existing unplanned solution. The momentum setpoint planner was further validated through on-orbit testing on the NorSat-2 spacecraft.
- Note: Graduate student Robert D. Magner at UTIAS/SFL won first place and a $10,000 check for his paper entitled, "Extending Target Tracking Capabilities through Trajectory and Momentum Setpoint Optimization." The award was bestowed during the prestigious Frank J. Redd Student Competition at the 32nd Annual Small Satellite Conference in Logan, Utah. 27)
• August 2018: The NorSat-1 satellite is fully operational, it has successfully integrated and enabled continuous operation of three diverse payloads, each satisfying different scientific and operational mission objectives: monitoring maritime vessels through space-based AIS detection and advancing science in space weather and solar research. Leveraging SFL's modular, extensible, and flight-proven NEMO bus platform has allowed reconciling the limitations and constraints imposed by each payload, achieving multidimensional mission objectives within a small satellite platform. 28)
• January 18, 2018: ESA has helped coastal authorities to track up to 70% more ships and pick up nearly three times more ship positions via satellite than was possible before. 29)
- The Norwegian Coastal Administration is using the information to manage the national coast and waters for safety, emergency and transport planning.
- Advanced receivers, NAIS (Novel Sat-AIS Receiver), developed by Kongsberg Seatex in Norway with support from ESA, were launched aboard the two NorSat satellites last year.
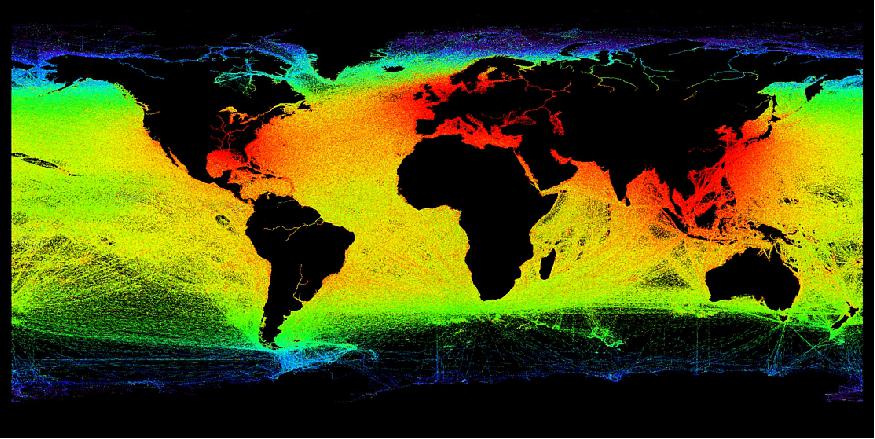
- In their first four months of operation, the NAIS instruments significantly improved the detection of identification signals (Figure 20, right).
- In areas with heavy maritime traffic the number of messages sent by ships can be so high that they jam the satellite receiver. The solution is a new type of message that is more easily picked up by satellites and suffers less interference from other messages.
- Carsten Tobehn, leading ESA's involvement, commented: "The advanced receiver was developed using the latest commercial off-the-shelf components. The complex hardware permits more sophisticated software processing, bringing significant improvements in picking up the messages."
- The two microsatellites hosting the payloads are owned by the Norwegian Space Center and are being operated by Statsat.
- Ivar Spydevold, CEO at Statsat, added: "The total number of messages from the NorSat receivers typically reach 2.5 million per day. This is nearly three times more than the previous receivers on AISSat-1 and 2 (launched in 2010), which together achieved about 900 000 per day."

Legend to Figure 20: The color code shows how many times each ship has been observed during the observation period of 24 hours (red->yellow: fewer observations, green->blue: more observations)
• January 10, 2018: There are yawning gaps in our interconnected world: unable or unwilling to take up satellite communications, many smaller ships find themselves isolated on the high seas. ESA is part of an ambitious effort to upgrade an existing VHF system to provide wide-bandwidth two-way communications to all mariners. 31)
- Norway's Norsat-2 satellite is currently being used to test the downlink segment of the proposed VDES (VHF Data Exchange System). ESA, together with industrial partners, is currently testing the downlink segment of VDES, using Norway's Norsat-2 satellite. VDES is considered a successor system to satellite-based AIS (Automatic Identification System).
- VDES would have the advantage of working with existing VHF infrastructure, continuing to perform the key automatic notifications function of AIS on current frequencies, while shifting messaging and other data transmission to additional frequency bands.
- VDES would enhance vessels' situational awareness, allowing mariners to downlink updated charts of ice and other hazards, to transmit information such as ships' manifests to shore, or to pass augmented navigation signals to the Arctic: the north polar region beyond the reach of Europe's EGNOS (European Geostationary Navigation Overlay Service) – whose satnav-sharpening signals are transmitted via geostationary satellites – around the curve of Earth. - Automated machine-to-machine monitoring of equipment, maintenance planning or local meteorology reports would also be facilitated, extending the ‘Internet of Things' to the high seas.
- A Norwegian Coastal Authorities vessel, operating in the vicinity of Svalbard, is receiving and recording the VDES signals. Follow-up analysis will show message error rates, including how transmission is affected by variations in the ionosphere, the electrically-active outer layer of Earth's atmosphere.
- This Norway-based test campaign began in July, supported by the Norwegian Space Center, Space Norway and the Norwegian Coastal Authority.
NORSAT-2 ESA VDE-SAT downlink verification
The objective of the ESA VDE-SAT (same as VDES) Downlink Verification is to demonstrate the feasibility of the VHF data exchange via satellite in a real operating environment. The feasibility of VDE-SAT will be demonstrated by a test campaign as well as a VDE-SAT service demonstration. The project is planned for H1 2017.
The main purpose of the test campaign is to assess the performance of the waveforms considered, enabling standardization of a suitable set of waveforms and corresponding parameters. Based on these results, recommendations regarding the downlink physical layer will be given.
Two test receivers, one on-board a Norwegian Coast Guard vessel and a reference receiver at FFI premises at Kjeller (Norway) will be used during the test campaign. The Coast Guard vessel will receive VDE-SAT transmissions at sea. The terminal at the FFI (Norwegian Defense Research Establishment) premises will be used as reference, for transmitter (Tx) and ship terminal receiver (Rx) verification, and debugging if necessary.
The specification and performance figures are derived from the Recommendation ITU-R M.2092-0. The activity shall demonstrate the functionality and performance of VDE-SAT Downlink waveforms and data link protocols that are currently being consolidated by international working groups in IALA (International Association of Marine Aids to Navigation and Lighthouse Authorities) and ITU (International Telecommunication Union) for data exchange via satellite in VHF maritime bands.
- August 15, 2017: CLARA (Compact Lightweight Absolute Radiometer) is a payload onboard the Norwegian NorSat-1 nanosatellite. The CLARA commissioning team, consisting of an engineer and a scientist from PMOD/WRC and an engineer from UITAS/SFL, successfully performed commissioning measurements from 21 – 24 August 2017 with the CLARA radiometer from the ground control center in Oslo, Norway. All planned measurements were successfully conducted, and one of CLARA's three channels was fully commissioned. The TSI (Total Solar Irradiance) value from these "First-Light" measurements is 1360.9 ±0.4 W m-2, which is very close to the predicted value. This is a satisfying verification of the robustness of the new CLARA design. 33)
- Commissioning experiments, which are now finished, included measurement of the deep space background radiation, determination of the pointing sensitivity, adjustment of the so-called CLARA shutter-delay parameter, and of course "First-Light" solar irradiance measurements. All data acquired during the commissioning phase will now be carefully analyzed by PMOD/WRC scientists while CLARA is switched off before routine measurements start in the next weeks.
References
1) Magne Osmundsen, "NORSAT-1 Mission Requirements Document," June 23, 2013, URL: ftp://pmodwrc.ch/pub/CLARA/Requirements/MRD%2023062013%20NSC.pdf
2) "SFL Wins Contract for First Norwegian Science Satellite – NORSAT-1," UTIAS/SFL, June 14, 2013, URL: http://utias-sfl.net/?p=1041
3) "Norway's Satellites," Norsk Romsenter, URL: http://web.spacecentre.no/eng/Norway-in-Space/Norway-s-Satellites
4) Berit Ellingsen, "A New Norwegian Satellite - NORSAT-1," NSC, January 9, 2013, URL: http://web.spacecentre.no/eng/content/view/full/6900
5) "NorSat-1, Norway's first scientific satellite,"UTIAS/SFL, January 25, 2014, URL: http://utias-sfl.net/?page_id=1260
6) Shahil Kanji, "Mechanical Aspects of Design, Analysis and Testing for the NorSat-1 Microsatellite," Thesis submitted for the degree Master of Applied Science at the University of Toronto, 2015, URL: https://tspace.library.utoronto.ca/bitstream/
1807/70383/1/Kanji_Shahil_201511_MAS_thesis.pdf
7) "NORSAT-2 Contract Awarded to SFL by Norwegian Space Centre," UTIAS/SFL, July 13, 2015, URL: http://utias-sfl.net/?p=2263
8) "Tracking marine traffic via satellite," ESA, July 10, 2015, URL: http://www.esa.int/Our_Activities/Telecommunications
_Integrated_Applications/Tracking_marine_traffic_via_satellite/%28print%29
9) Wolfgang Finsterle, Silvio Koller, Daniel Pfififfner, Marcel Spescha, Markus Suter, Werner Schmutz, Benjamin Walter, "CLARA – A Compact and Light-Weight Absolute Radiometer," URL: http://lasp.colorado.edu/media/projects/SORCE/meetings
/2013/presentations/Web_Posters/Poster_Finsterle_CLARA.pdf
10) Wolfgang Finsterle, Silvio Koller, Ivo Beck, Marcel Spescha, Markus Suter, Benjemin Walter, Werner Schmutz, "The new TSI radiometer CLARA," Proceedings of SPIE, 'Earth Observing Missions and Sensors: Development, Implementation, and Characterization III,' Vol. 9264, Beijing, China, October 13, 2014, doi:10.1117/12.2069614
11) "The Compact Lightweight Absolute Radiometer (CLARA) on the Norwegian nanosatellite NORSAT-1," URL: https://www.pmodwrc.ch/pdf/clara.pdf
12) "Microsatellites: NORSAT-2," UTIAS/SFL, Jan. 25, 2014, URL: https://web.archive.org/web/20230202154119/https://www.utias-sfl.net/?page_id=2312
13) Laura M. Bradbury, Dumitru Diaconu, Simon Molgat Laurin, Clement Ma, Alex M. Beattie, Robert E. Zee, Ivar S. Spydevold, Hans Christian Haugli, Jon Harr, Frank Udnæs, "NORSAT-2: Enabling Advanced Maritime Communication with VDES," Proceedings of the 31st Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 5-10, 2017, paper: SSC17-XIII-08, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3698&context=smallsat
14) "NorSat-2, AIS + VDES," Norsk Romsenter, February 2017, URL: http://nfas.autonomous-ship.org/wp-content/uploads/2020/09/6_mikrosat.pdf
15) "NORSAT-1 Launch Postponed Due to Faulty Bracket Provided by Arianespace," UTIAS/SFL, April 14, 2016, URL: http://utias-sfl.net/?p=2402
16) "ROSCOSMOS: Soyuz-2.1a Launch Vehicle with KANOPUS-V-IK Satellite Successfully Lifts Off From Baikonur," Roscosmos, July 14, 2017 [web source no longer available]
17) Stephen Clark, "Soyuz rocket lifts off with 73 satellites," Spaceflight Now, July 14, 2017, URL: https://spaceflightnow.com/2017/07/14/soyuz-rideshare-launch/
18) Berit Ellingsen, "NorSat-1 and NorSat-2 launched!," Norsk Romsenter, 14 July 22017, URL: https://web.archive.org/web/20170802225316/https://www.romsenter.no/content/view/full/10119
19) Jeff Foust, "Soyuz set to launch 72 smallsats," Space News, July 7, 2017, URL: http://spacenews.com/soyuz-set-to-launch-72-smallsats/
20) "Russia's Soyuz-2.1 Set to Launch 71 Smallsats Later This Week," Satnews Daily, July 10, 2017, URL: http://www.satnews.com/story.php?number=704505558
21) "Launch campaign for „Soyuz": maiden flight for our DCSM unit," Orbital Systems, May 25, 2017, URL: https://web.archive.org/web/20170606075556/http://www.orbitalsystems.de/launch-campaign-for-soyuz-maiden-flight-for-our-dcsm-unit/
22) Leena Pivovarova, "48 Doves to Launch on a Soyuz Rocket," July 7, 2017, URL: https://www.planet.com/pulse/48-doves-to-launch-on-a-soyuz-rocket/
23) https://web.archive.org/web/20200926204435/https://www.axelspace.com/en/solution_/wnisat1r/
24) "Russia will launch into orbit 72 small satellites per launch," Russian Aviation, 15 June 2017, URL: https://www.ruaviation.com/news/2017/6/15/8955/?h
25) Jon Harr, Tyler Jones, Bo N. Andersen, Torkild Eriksen, Andreas N. Skauen, Knut Svenes, Eirik V. Blindheim, Ivar Spydevold, Alex Beattie, Laura M. Bradbury, Brad Cotten, Daniel Kekez, Payam Mehradnia Robert E. Zee, Frode Storesund, "Microsatellites for Maritime Surveillance - an update on the Norwegian Smallsat Program," Proceedings of the 69th IAC (International Astronautical Congress) Bremen, Germany, 1-5 October 2018, paper: IAC-18.B4.4.2
26) Robert D. Magner, Robert E. Zee, "Extending Target Tracking Capabilities through Trajectory and Momentum Setpoint Optimization," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-VIII-01, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4112&context=smallsat
27) "UTIAS-SFL Students Win Significant Awards for their Technical Papers," Satnews Daily, 14 August 2018, URL: http://www.satnews.com/story.php?number=698252980
28) Payam Mehradnia, Alexander M. Beattie, Daniel D. Kekez, Robert E. Zee, Benjamin Walter, Silvio Koller, Daniel Pfiffner, Wolfgang Finsterle, Werner Schmutz, Huy M. Hoang, Espen Trondsen, Bjørn Lybekk, Lasse B. N. Clausen, Jøran Idar Moen, Frode A. S. Storesund, Bjørn T. Narheim, Frank Olaf Sem-Jacobsen, Jon Harr, Magne Osmundsen, Bo N. Andersen, "NorSat-1: Enabling High Performance and Multipurpose Microsatellite Missions," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-I-06, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4068&context=smallsat
29) "Satellites paint a detailed picture of maritime activity," ESA, 18 Jan. 2018, URL: http://m.esa.int/Our_Activities/Telecommunications_Integrated_
Applications/Satellites_paint_a_detailed_picture_of_maritime_activity
30) "Ships detected by AISSat-1," ESA, 17 Jan. 2018, URL: http://m.esa.int/spaceinimages/Images/2018/01/Ships_detected_by_AISSat-1
31) "From satellites to the sea: VDES offers global link for ships," ESA, 10 Jan. 2018, URL: http://m.esa.int/Our_Activities/Space_Engineering_
Technology/From_satellites_to_the_sea_VDES_offers_global_link_for_ships
32) http://www.iala-aism.org/products-projects/e-navigation/test-bedsprojects/norsat-2/
33) "CLARA on NorSat-1 Successfully Switched on for the First Time," PMOD/WRC press release, 25 August 2017, URL: http://www.pmodwrc.ch/presse/2017_Medien
mitteilung_CLARA_FirstLight_20170825.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Sensor Complement NorSat-2 Launch Mission Status References Back to Top