OceanSat-2
EO
Ocean colour instruments
Atmosphere
Ocean
Launched in September 2009, OceanSat-2 is a mission developed by the Indian Space Research Organization (ISRO) with the objective of providing service continuity for operational users of the Ocean Color Monitor (OCM) instrument flown on OceanSat-1. Other application areas include the study of surface wind, ocean surface strata, observation of chlorophyll concentrations, monitoring phytoplankton blooms, and study of atmospheric aerosols and suspended sediments in the water.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 24 Sep 2009 |
| End of life date | 31 May 2023 |
| Measurement domain | Atmosphere, Ocean |
| Measurement category | Atmospheric Temperature Fields, Ocean colour/biology, Aerosols, Ocean surface winds |
| Measurement detailed | Ocean chlorophyll concentration, Aerosol optical depth (column/profile), Aerosol Extinction / Backscatter (column/profile), Aerosol effective radius (column/profile), Atmospheric temperature (column/profile), Wind vector over sea surface (horizontal), Ocean suspended sediment concentration, Air temperature (near surface) |
| Instruments | OCM (Oceansat-2), ROSA, OSCAT |
| Instrument type | Ocean colour instruments, Scatterometers, Atmospheric temperature and humidity sounders |
| CEOS EO Handbook | See OceanSat-2 summary |
Related Resources

Summary
Mission Capabilities
OceanSat-2 carries three instruments:
- Ocean Color Monitor-2 (OCM-2),
- OceanSat-2 Scanning Scatterometer (OSCAT)
- Radio Occultation Sounder for Atmospheric Studies (ROSA).
With improved resolution, OCM-2 is a solid-state radiometer that builds upon its predecessor OCM-1 to provide data used for applications in atmospheric aerosols, ocean colour and marine biology. OSCAT is utilised for the estimation of the radar backscattered power and subsequent local and global wind velocity, magnitude and direction retrieval over the ocean. It aims to provide global ocean coverage and wind vector retrieval with a revisit time of two days. ROSA is a new GPS occlusion receiver provided by the Italian Space Agency (ASI) with the objective of characterising the lower atmosphere and ionosphere to allow for the development of scientific exploration into new radio occultation data sets.
Performance Specifications
OCM-2 provides observations in eight spectral bands in the visible and near-infrared (VNIR) regions. The ground resolution is 360 m in the along-track direction and 236 m in the cross-track direction, with a swath width of 1420 km for each. Developed by ISRO, OSCAT is a pencil beam scatterometer that can provide a resolution of 25 km x 25 km over a swath of 1400 km. ROSA has a vertical resolution of 0.3 km in the low troposphere and 1-3 km in the high troposphere, with a horizontal resolution of less than 300 km for temperature and humidity measurements.
OceanSat-2 undergoes a sun-synchronous near circular orbit at an altitude of 720 km and an inclination of 98.28°. It has a period of 99.31 minutes and a revisit cycle of two days, with the Local Time on Ascending Node at 1200 hours.
Space and Hardware Components
Built with a design life of five years, OceanSat-2 features a three-axis stabilised bus configured around the Indian Remote Sensing (IRS) bus with improved mission-specific subsystem design. With a mass of 970 kg, the main structure is made from a CFRP (Carbon Fiber Reinforced Plastic) composite cylinder with a PSLA interface ring. Attitude sensing is provided by Earth horizon sensors, digital sun sensors, triaxial magnetometers and a gyroscope-based inertial reference unit. Actuation is provided by four reaction wheels in a tetrahedral configuration, two magnetic torquer coils and monopropellant hydrazine thrusters. The telemetry data transmission system uses an X-band antenna for uplink and downlink at a speed of 4 kbit/s.
OceanSat-2
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
The ISRO (Indian Space Research Organization) spacecraft OceanSat-2 is envisaged to provide service continuity for the operational users of OCM (Ocean Color Monitor) data as well as to enhance the application potential in other areas. OCM is flown on IRS-P4/OceanSat-1, launched May 26, 1999. The main objectives of OceanSat-2 are to study surface winds and ocean surface strata, observation of chlorophyll concentrations, monitoring of phytoplankton blooms, and study atmospheric aerosols and suspended sediments in the water. OceanSat-2 will play an important role in forecasting the onset of the monsoon and its subsequent advancement over the Indian subcontinent and over South-East Asia.
- The OceanSat-2 mission was approved by the Government of India on July 16, 2005. 1) 2) 3)
Coverage of applications:
• Sea-state forecast: waves, circulation and ocean MLD (Mixed Layer Depth)
• Monsoon and cyclone forecast - medium and extended range
• Observation of Antarctic sea ice
• Fisheries and primary production estimation
• Detection and monitoring of phytoplankton blooms
• Study of sediment dynamics
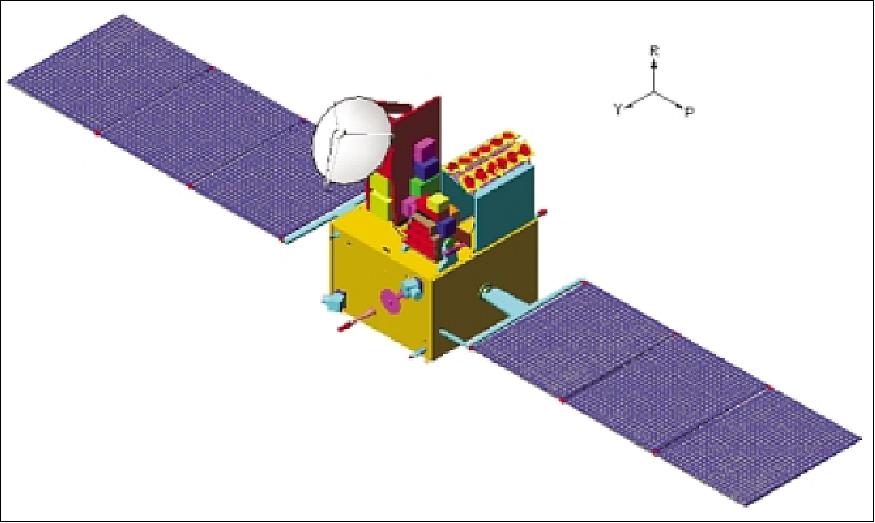
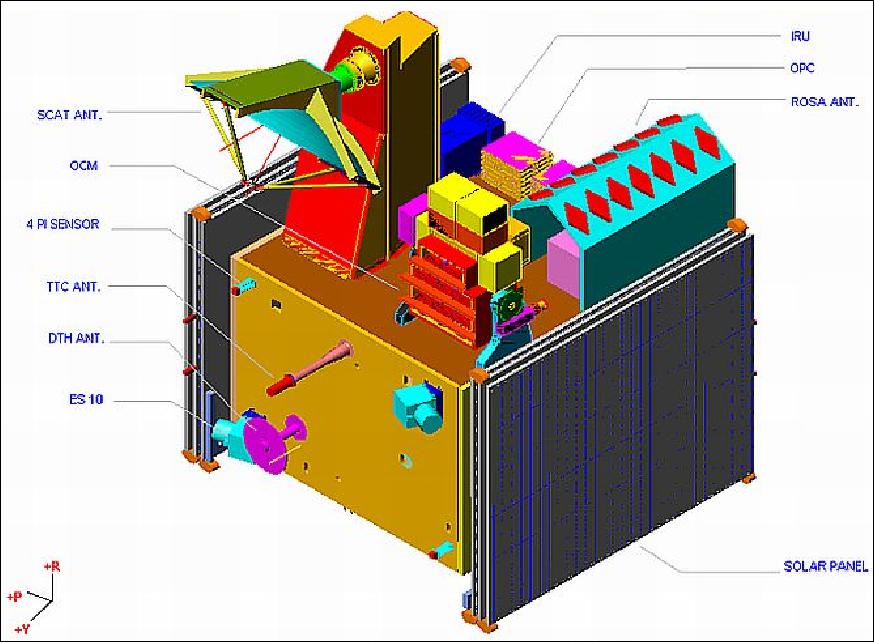
Spacecraft
OceanSat-2 is a three-axis stabilized spacecraft configured around the proven IRS bus along with improved mission-specific subsystem designs. The main structure is made up of a CFRP (Carbon Fiber Reinforced Plastic) composite cylinder with a PSLV interface ring.
Three deployment mechanisms are included:
a) solar panel auto-deployment after separation from the launcher,
b) OCM hold-down-release-tilt mechanism,
c) OSCAT antenna hold-down-release mechanism.
The thermal design of the spacecraft employs both passive and active control elements. 4) 5) 6)
The EPS (Electrical Power Subsystem) uses two solar arrays with silicon cells, the size of the arrays is identical to those of IRS-P6/P5. A power storage capacity of 24 Ah is provided by 2 NiCd batteries for eclipse operations. All onboard subsystems are supplied with two raw buses of 28 - 42 V, and DC-DC converters are used to derive the required voltage lines.
A centralized BMU (Bus Management Unit), designed with a MAR31750 microprocessor, provides the service functions for AOCS (Attitude and Orbit Control Subsystem), sensor processing, TT&C (Telemetry, Tracking & Command), auto-temperature control, and PSK demodulation of the TT&C uplink carrier. Attitude sensing is provided by Earth horizon sensors, digital sun sensors, triaxial magnetometers, sun sensors with a FOV of 4π sr, and a gyroscope-based inertial reference unit. Actuation is provided by four reaction wheels (5 Nms, 0.1 Nm) mounted in a tetrahedral configuration, two magnetic torquer coils, and monopropellant hydrazine thrusters. An 8-channel SPS (Standard Positioning Service) GPS receiver provides both position and velocity, improving the overall orbit determination accuracy.
The payload data handling system is a new design; it is configured to transmit OCM and scatterometer data on a single carrier with QPSK modulation. The OCM data will be transmitted on the I-channel, while the OSCAT / ROSA data will be transmitted on the Q-channel. An indigenous onboard SSR (Solid-State Recorder) of 64 Gbit capacity is used to record the processed data of OSCAT and ROSA continuously; the OCM data is being recorded per requirement.
RF communications:
The payload telemetry data transmission system is configured using SSPAs (Solid-State Power Amplifiers) with a conventional X-band antenna. In addition, there is a TT&C subsystem in S-band for spacecraft control.
The ground segment elements for OceanSat-2 include:
- the SCC (Spacecraft Control Center) at ISTRAC (ISRO Telemetry, Tracking and Command Network), Bangalore;
- the payload data reception station at NRSA (National Remote Sensing Agency) Shadnagar;
- data processing, data product generation and dissemination to users at NRSA, Balanagar, Hyderabad;
- data product software development at SAC (Space Application Center), Ahmedabad;
- development of mission software, flight dynamics software and mission management at ISAC (ISRO Satellite Center), Bangalore, India.
Spacecraft bus structure | CFRP: Al honeycomb sandwich cylinder with Al honeycomb panels |
Thermal system | Passive/semi-active thermal control with paints, blankets, OSRs and closed-looped auto temperature controllers |
Thermal control | - Payloads: 15 ± 2ºC for OCM, 5 - 45ºC for OSCAT |
Mechanisms | - Solar panel deployment |
EPS (Electrical Power Subsystem) | - Solar panels: 3 on either side of S/C, sun-tracking, area = 15.12 m2 |
AOCS: | - Senors: Earth sensors, sun sensors, magnetometers, sun sensors, IRU |
Data Handling Subsystem | - Data rate: 42.4515 Mbit/s |
TT&C Subsystem | - Uplink: PCM/PSK/PM modulation, 4 kbit/s, time tag command facility |
Spacecraft mass, design life | 970 kg, 5 years |
Launch
The OceanSat-2 spacecraft was launched on Sept. 23, 2009, on a PSLV launcher (PSLV-C14) from SDSC-SHAR on the east coast of India. Originally the launch was planned for the end of 2007. 7) 8)
Secondary payloads (6) on the flight are the following CubeSats:
• UWE-2 (University of Würzburg), Würzburg, Germany
• BeeSat (Technical University of Berlin), Berlin, Germany
• SwissCube, a CubeSat of Ecole Polytechnique Federale de Lausanne, Lausanne, Switzerland
• ITUpSat (Istanbul Technical University PicoSatellite-1), Istanbul, Turkey.
• Rubin-9.1 and Rubin-9.2 nanosatellites of OHB-System, Bremen, Germany (each with a mass of 8 kg). Both nanosatellites are equipped with newly developed types of spaceborne AIS receivers.
The secondary payload (CubeSat) launch service provider (supporting integration and contracting efforts) is ISIS (Innovative Solutions In Space), Delft, The Netherlands. All four CubeSats are equipped with the SPL (Single Picosatellite Deployer) system of Astrofein (Astro und Feinwerktechnik Adlershof GmbH), Berlin, Germany.
Orbit: Sun-synchronous near-circular orbit, altitude ~720 km, inclination = 98.28º, period = 99.31 min, the LTAN (Local Time on Ascending Node) is at 12:00 hours ±10 minutes, revisit cycle of 2 days.
The OceanSat-2 tracking system is S-band tone ranging from ISTRAC (ISRO Telemetry Tracking and Command Network) ground stations. The ranging system is CORTEX. Tracking measurements are two-way range, Doppler and angles (Azimuth and Elevation). 9)
Mission Status
• September 7, 2017: OceanSat-2 L2 25 km and 50 km winds CDR (Climate Data Records) have been created covering the period from 15 December 2009 to 20 February 2014, using the latest state-of-the-art wind retrieval algorithms. 10)
- Scatterometer data have been collocated with ECMWF (European Centre for Medium-Range Weather Forecasts) ERA-Interim winds and scatterometer level 2 wind products have been created at 25 km and 50 km swath grid.
- The data records, OSCAT L2 25 km winds data record release 1 - OceanSat and OSCAT L2 50 km winds data record release 1 - OceanSat, in BUFR and NetCDF format, will be available soon from the EUMETSAT Data Center.
• June 9, 2017: ESA is pleased to announce that improved access to the collections distributed online by ESA through the TPM (Third Party Missions) program has been deployed. Two enhanced features have been set up to ease access to these collections: 11)
- A TPM online access list has been created to provide users with centralized access to all the TPM online collections dissemination systems (17 TPM collections)
- A new online dissemination system providing a geographical catalogue, a folder tree access and a filename search has been deployed for 13 TPM collections.
From the new TPM L-OADS (Online Dissemination System), the products can be downloaded immediately if the user is logged in and authorized for the specific product download. The below collections are currently available; ESA will, however, continuously populate this new dissemination system with new collections.
- IKONOS ESA archive
- Image 2006
- KOMPSAT-2 ESA archive (NEW)
- Oceansat-2 NRT data
- Pleiades ESA archive (NEW)
- RapidEye ESA archive
- RapidEye South America
- RapidEye time series for Sentinel-2
- Seasat ESA archive
- SPOT-1 to 5 ESA archive
- SPOT-6 and 7 ESA archive (NEW)
- Tropforest Dataset
- WorldView-2 European Cities.
• May 2017: ISRO report on Ocean Color Activities. 12)

• April 26, 2016: ESA, in collaboration with GAF AG (Gesellschaft für Angewandte Fernerkundung, Munich), acquires and process every day OceanSat-2 passes over the Neustrelitz reception station from 1 January 2016. All passes are systematically processed to levels 1B, 2B and 2C, and available for users in NRT (< 3 hours).
Products are available in: 13)
1) Level 1B: Geophysical Data containing Radiance Data for all 8 Bands of OCM-2.
2) Level 2B: Geophysical Data L2B for given Geo physical parameter. Geo physical parameters: Chlorophyll, Aerosol Depth, Different Attenuation, Total Suspended Sediments.
3) Level 2C: Georeferenced Radiance Data for given geophysical parameters. Geo physical parameters: Chlorophyll, Aerosol Depth, Different Attenuation, Total Suspended Sediments.
• Feb. 11, 2016: The OceanSat-2 spacecraft is still operational after the OSCAT instrument was switched off in April 2014. It continues to operate with the other two sensors: OCM-2 and ROSA. 14)
- OCM-2 (Ocean Color Monitor-2), a multispectral (eight bands in the visible and near-infrared) electro-optical payload operating in two modes:
1) LAC (Local Area Coverage), with a GSD of 360 m. The LAC data is received in real-time with provision for reception in SSR mode as well. In LAC mode, the data is received over two passes per day.
2) GAC (Global Area Coverage) with a GSD of 1 km. In GAC mode, the data is received only in SSR mode with full global coverage in 8 days.
The data is received at the following ground stations:
- NRSC Hyderabad (LAC and GAC Mode);
- INCOIS, Hyderabad (LAC Mode);
- Mauritius (LAC Mode);
- Euromap, Germany (LAC Mode).
ROSA (Radio Occultation Sounder for Atmospheric studies), a GPS occultation receiver of ASI (Italian Space Agency), is operational with four dumps of data received daily at NRSC, Hyderabad where Level-1 processing of the data is carried out.
OSCAT (OCEANSAT-2 Scatterometer) proved to be an excellent instrument and the widespread acceptance and usage of the OSCAT data by various international agencies like NASA/JPL, NOAA, KNMI, EUMETSAT and ECMWF, for both research and operational purposes, is a testimony to its quality and utility. OSCAT had developed snags in the transmitter subsystem system of the primary chain and scan mechanism of the redundant (backup) chain during the end of its design life period (around 4½ years from launch), forcing the ISRO to suspend its operation in April 2014. During its lifetime, OSCAT has demonstrated the importance and significance of ocean wind vector data in weather modelling and prediction and laid the ground for the continuation of the global ocean surface wind vector data acquisition. Based on this experience, ISRO developed the SCATSAT-1 (Scatterometer Satellite) spacecraft, which is scheduled for launch in July 2016.
• August 2015: The OceanSat-2 spacecraft and its sensor complement (OCM-2 and ROSA) are operating nominally in 2015; the OSCAT instrument is unavailable since Feb. 2014. ISRO terminated the operation of OSCAT in April 2014. 15) 16) 17)
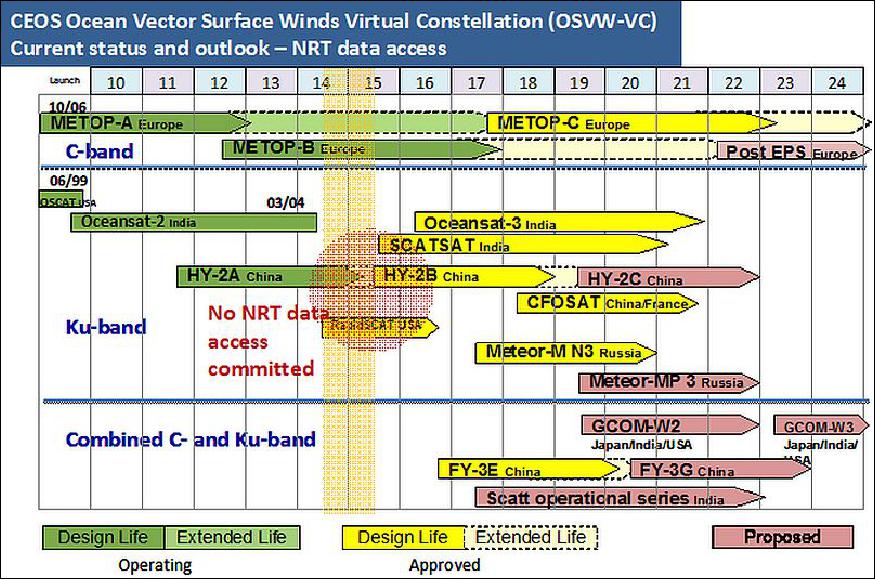
- Following the loss of OSCAT, only ASCAT data from MetOp-A and -B of EUMETSAT are currently available in near real time. Since both MetOp satellites are on the same orbit, there is now a lack of scatterometer data on a well-separated orbital plane.
- The PO.DAAC regrets to inform its users of the discontinuation of data retrieval for its OSCAT Level 2B dataset produced by the QuikSCAT science data systems team at JPL. The OSCAT scatterometer onboard the OceanSat-2 spacecraft experienced failure in its travelling wave tube amplifier (TWTA) toward the end of February 2014. As a result, science data processing of ocean surface wind vector data has permanently ceased. The last available file from the QuikSCAT science data systems team was provided to the PO.DAAC is effective on 20 February 2014 corresponding to orbital revolution 23370 ending at 2330 UTC. The data retrieved over the course of the mission will remain available at the PO.DAAC for continued public distribution. 18)
• On Feb.20, 2014, the OSCAT (OceanSat-2 Scanning Scatterometer) instrument experienced an irrecoverable malfunction in its TWTA (Traveling Wave Tube Amplifier) and is not operating anymore. As a result, science data processing of ocean surface wind vector data has permanently ceased. 20) OSCAT failed shortly before the completion of the intended five-year instrument lifespan. The OSCAT scatterometer on OceanSat-2 was ISRO's first active microwave payload. 21)
• The OceanSat-2 spacecraft and its sensor complement are operating nominally in 2014.
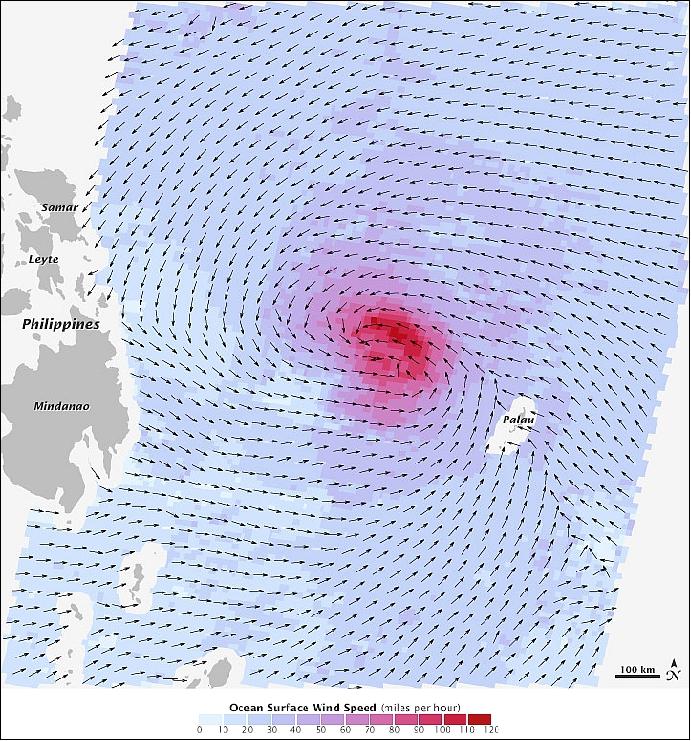
• On Nov. 6, 2013, the OSCAT instrument of OceanSat-2 measured Haiyan's surface winds as shown in Figure 6. The arrows indicate wind direction while the colours indicate wind speed, with darker shades of purple indicating stronger winds (the strongest ones are shown in red). As is typical of cyclones in the northern hemisphere, the area of strongest winds was northeast of the storm centre. 22)
According to the OceanSat-2 data, which was processed by scientists at NASA/JPL (Jet Propulsion Laboratory) using an experimental technique, the storm's winds peaked at 206 km/hr at the time of measurement—strong enough to devastate the landscape.
• The OceanSat-2 spacecraft and its sensor complement are operating nominally in 2012 (3rd year on orbit). 23)
- Progress is being reported in the context of the ROSA-ROSSA processing chain. 24)
• Since NASA's SeaWinds scatterometer on the QuikSCAT spacecraft ceased nominal operations in November 2009, scientists and engineers from NASA, JPL, and NOAA (National Oceanic and Atmospheric Administration) have collaborated with ISRO in ongoing efforts to calibrate and validate OSCAT (OceanSat-2 Scanning Scatterometer) measurements in order to ensure continuous coverage of ocean vector winds for use by the global weather forecasting and climate community.25) 26)
The satellite image of Hurricane Irene (Figure 7), showing the storm's ocean surface wind speed and direction, was acquired at 1:07 a.m. EDT on Aug. 27, 2011, approximately six hours before it hit the North Carolina coast. The data are provided courtesy of the Indian Space Research Organization (ISRO) from the OSCAT instrument on ISRO's OceanSat 2 spacecraft, launched in September 2009. Wind vector data processing was performed at NASA/JPL, Pasadena, CA. The OSCAT winds are obtained at a resolution of 25 km x 25 km and do not resolve the hurricane's maximum wind speeds, which occur at much finer scales.
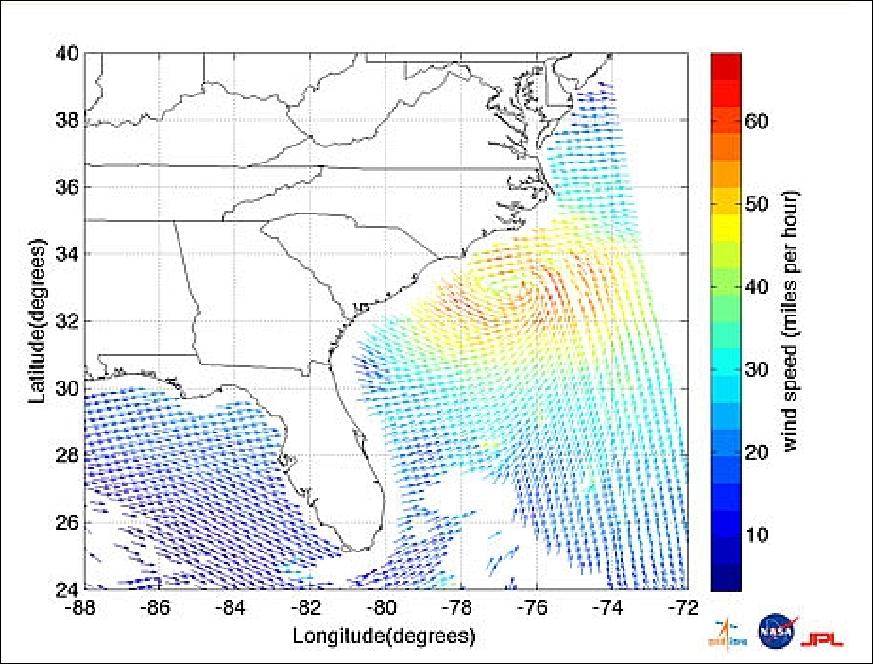
Legend to Figure 7: Hurricane Irene made landfall early Saturday morning, Aug. 27, 2011, just west of Cape Lookout, NC (USA), as a category one hurricane with maximum sustained winds of 136 km/h (75 knots). It is currently over eastern North Carolina and is forecast to gradually weaken as it moves northward along the East Coast of the United States over the next two days.
• NOAA has been receiving day-old OSCAT data via the ISRO dedicated FTP server since September 2010. 27)
• At KNMI (Royal Netherlands Meteorological Institute), the OSCAT (OceanSat-2 Scatterometer) instrument data are processed towards a 50 km product for the EUMETSAT OSI SAF (Ocean and Sea Ice - Satellite Applications Facility). 28)
KNMI hosts the operational deployment of this product as part of the EUMETSAT OSI SAF, a project by Météo France, the Norwegian Meteorological Institute, the Danish Meteorological Institute, the Swedish Meteorological Institute, Ifremer and the Royal Netherlands Meteorological Institute (KNMI). 29)
At KNMI, OSCAT data are acquired at the Svalbard ground station and sent to India for further processing, with a backup facility at the EUMETSAT headquarters. EUMETSAT then makes available near real-time Level 2a scatterometer products through EUMETCast. These products are used as basis for further processing at KNMI. The wind products are distributed in one resolution with 50-km cell spacing. The product has a timeliness of approximately 1-1.5 hours from the last sensing time in a product file.
• The OceanSat-2 spacecraft and its sensor complement are operating nominally in 2011.

• The in-flight commissioning phase of ROSA was completed in July 2010 (Ref. 47).
• In May 2010, the first ROSA-ROSSA release was installed into the Italian operative ROSA Ground Segment (the same processing chain will be also installed in the Indian ground segment). ROSA-ROSSA scientific validation was performed using observations collected by other Radio Occultation mission data and it was carried out following two procedures. The input dataset was defined considering one day of real observations carried out in the framework of the operative COSMIC, CHAMP and GRAS onboard MetOp-A radio occultation missions (Ref. 49).
- First, ROSA-ROSSA products at each level were statistically compared with the corresponding products generated by the other processing software, giving in input to the raw data observed by the other occultation mission.
- Secondly, ROSA-ROSSA and COSMIC original refractivity and temperature profiles (obtained giving in input to ROSA-ROSSA the corresponding COSMIC raw observations) were individually compared on a statistical base with co-located ECMWF 91 level analysis.
• In April 2010, the data from the OceanSat-2 payloads ((OCM-2 and OSCAT) have started flowing to the users. Actually, the OCM-2 data products are available from January 1, 2010, onwards.
• In early 2010, the spacecraft and two payloads (OCM-2 and OSCAT) are operating nominally. 31)
• All three payloads on board the OceanSat-2 have been successfully turned on providing good-quality data. 32)
Sensor Complement
OCM-2 (Ocean Color Monitor-2)
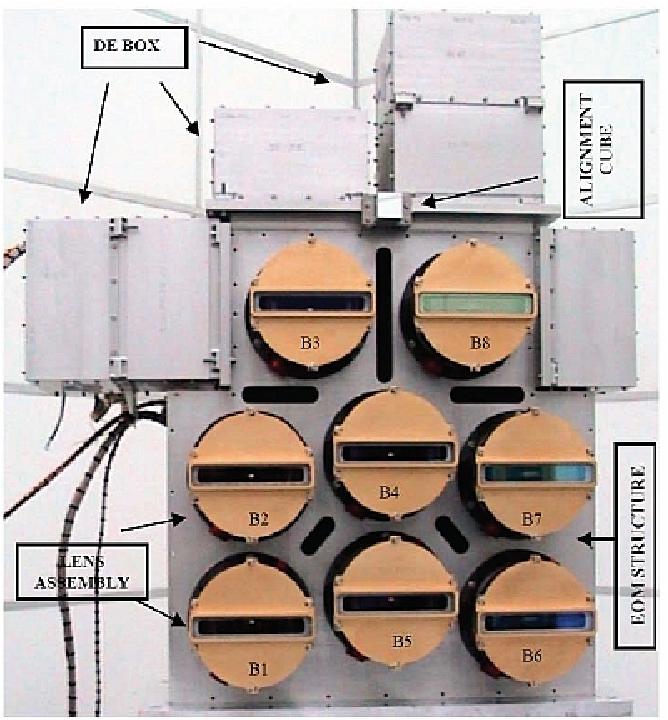
OCM-2 is an improved version of the one flown on OceanSat-1. OCM-2 is a solid-state radiometer providing observations in eight spectral bands in the VNIR region. The instrument employs pushbroom scanning technology with linear CCD detector arrays (191 6K CCD) of 6000 elements (3730 active detectors in the centre are used to cover the image field, and the rest are used to correct for dark current). A swath width of 1420 km is provided. An along-track instrument tilt capability of ±20º is provided to avoid sun glint. OCM optics is based on one lens per band (wide angle telecentric lens design, refractive system). The ground resolution is 360 m in the along-track and 236 m in the cross-track direction. 33) 34) 35) 36) 37) 38)
The processing electronics consists of a video processor, timing logic and interface circuits. An onboard calibration scheme, using light-emitting diodes (LEDs) mounted near each CCD, is incorporated to study the long-term stability of the radiometric performance.
Two modes of ground resolution are supported:
- LAC (Local Area Coverage): 360 m (cross-track) x 236 m (along-track)
- GAC (Global Area Coverage): 1 km.
Parameter | Value | Parameter | Value |
Spectral range (8 bands) | 0.4 - 0.9 µm (VNIR) | SNR | > 512 (saturation) |
Scan plane tilt | ±20º,to avoid sun glitter | Effective focal length | 20 mm |
Camera MTF | >20% at Nyquist frequency | Absolute radiometric accuracy | <10% |
IFOV at nadir (spatial resolution) | LAC: 360 m x 236 m | No of CCD elements | 6000 |
FOV (swath) | 1420 km (±43º) | CCD element size | 10 µm x 7 µm |
Tilt capability | ±20º along track | Integration time | 52.4 ms |
Data quantization | 12 bit | Exposure levels (gain) | 16 |
Data rate (real-time) | 20.8 Mbit/s | Onboard calibration | 2 LEDs per band |
Instrument mass | 78 kg | Instrument power | 134 W |
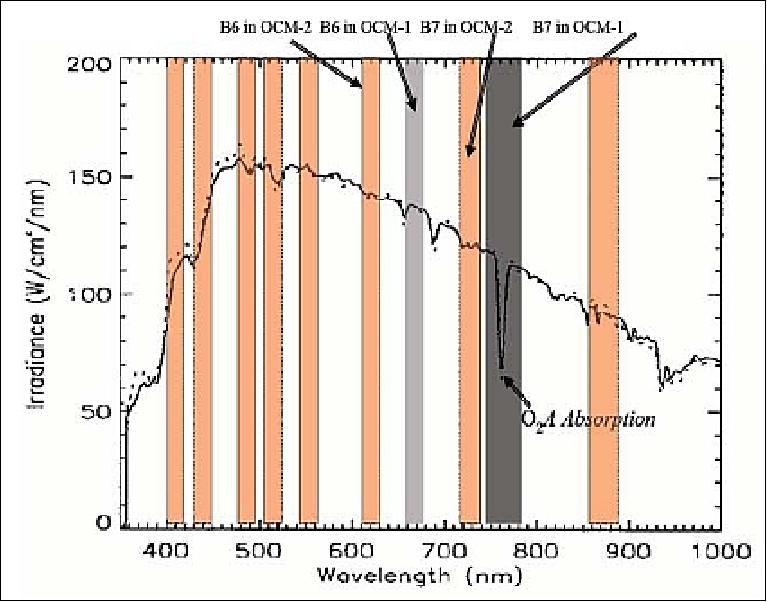
The configuration of the OCM payload is identical to the one flown in IRS-P4 (OceanSat-1) except that the spectral band is modified for band 6 and band 7. For band 6, the centre wavelength is shifted from 670 nm to 620 nm to improve the reflectance from suspended sediments; for band 7, the centre wavelength is shifted from 760 nm to 740 nm to avoid oxygen absorption. However, the bandwidth remains the same in both cases.
Spectral band | Wavelength range (nm) | SNR @ Ref Radiance | Nominal Ref radiance of Sea (mW cm-2 s-1 µm-1) | Saturation radiance (mW (mW cm-2 s-1 µm-1) | Application |
B1 | 404-424 | 356 | 9.1 | 70.2 | Yellow substance absorption |
B2 | 431-451 | 386 | 8.4 | 36.5 | Chlorophyll absorption |
B3 | 476-496 | 380 | 6.6 | 29.6 | Chlorophyll and other pigments |
B4 | 500-520 | 324 | 5.6 | 25.8 | Turbidity and suspended sediments |
B5 | 546-566 | 311 | 4.6 | 21.2 | Chlorophyll reference |
B6 | 610-630 | 240 | 2.5 | 16.0 | Total suspended matter estimation |
B7 | 725-755 | 286 | 1.6 | 1.9 | Atmospheric correction |
B8 | 845-885 | 141 | 1.1 | 14.3 | Atmospheric correction/aerosol optical thickness |
OSCAT (OceanSat-2 Scanning Scatterometer)
OSCAT is an active microwave device designed and developed at ISRO/SAC, Ahmedabad. The objective is to monitor ocean surface wind speed and directions. The instrument is a pencil beam wind scatterometer operating at Ku-band of 13.515 GHz. OSCAT is being utilized for the estimation of the radar backscattered power and subsequent local and global wind vector (velocity magnitude and direction) retrieval over the ocean, from the normalized radar cross-section (σo), for cell resolution grids of 25 km x 25 km over a swath of 1400 km. The aim is to provide global ocean coverage and wind vector retrieval with a revisit time of 2 days. 39) 40) 41)
The scanning configuration of OSCAT, similar in design to Seawinds of NASA, offers the advantages like simpler onboard payload, better radar backscatter cross-section (σo) measurement and directional accuracy, continuous and wider swath with no nadir gaps, less complex signal processing and reduced data rates, smaller and lighter onboard instrument and simplified wind retrieval model compared to conventional multiple fan beam scatterometers.
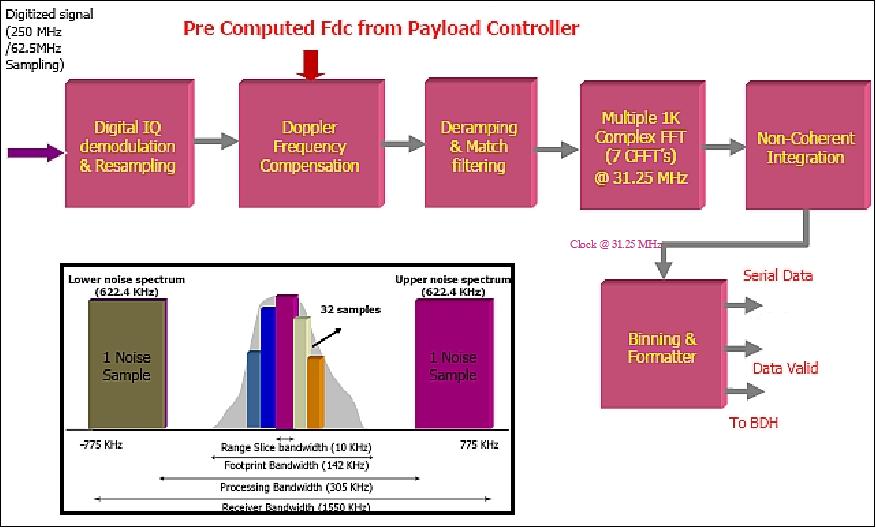
The OSCAT onboard processing requirements are:
- Digital IQ demodulation and decimation
- Doppler shift computation for received return echo
- Doppler frequency compensation
- Reference chirp generation and de-chirping of echo returns
- Multiple 1 K complex FFTs of the de-chirped data
- Binning for estimation of signal+noise energy for every pulse
- Noise filtering and binning for noise-only estimation for every pulse
- Formatting of processed and payload and spacecraft auxiliary data
- Optional formatting and transmission of sensor raw data for selected acquisitions over Indian visibility regions.
The OSCAT payload design includes many new elements; it consists of an antenna, rotary joint, scan mechanism and switch assembly, transmitter, receiver, frequency generator, internal calibration unit and digital subsystems, that is to say: DCG (Digital Chirp Generator), DACS (Data Acquisition and Compression Subsystem), and payload controller. The frequency generator provides coherent reference frequencies for other onboard units and also generates LFM (Linear Frequency Modulated) pulses for transmission.
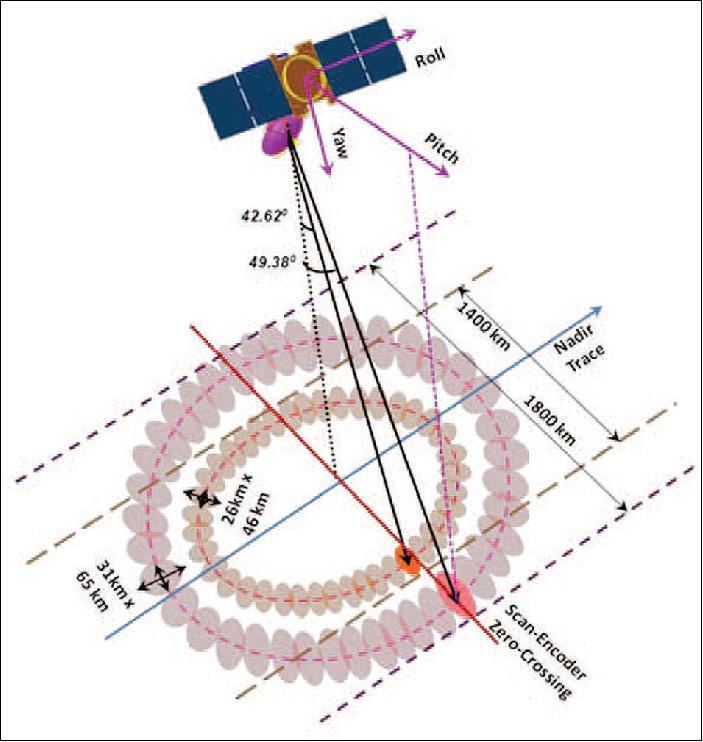
The OSCAT parabolic dish antenna has a diameter of 1 m diameter which is offset-mounted with a cant angle of 46º with respect to the yaw axis (earth viewing axis). The antenna is continuously rotated at 20.5 rpm using a DC motor with the scan-axis along the +velocity yaw axis. By using two offset feeds at the focal plane of the antenna, two beams (inner beam and outer beam) are generated which scan the ground surface in a conical fashion.
The antenna consisting of two off-axis near prime focus feeds along with a 1 m paraboloid reflector creates inner and outer beams, which operate in an interleaved manner with an effective PRF (Pulse Repetition Frequency) of 100 Hz each. The antenna is conically scanned about the positive yaw axis at 20.5 rpm, by an appropriate scan mechanism. The received signal is amplified and down-converted to generate the IF signal. This IF-received signal from the receiver is fed to the onboard digital system for subsequent digitization, digital I/Q demodulation and signal processing. The raw and processed data are fed to the spacecraft data handling unit for ground transmission.

The two pencil beams, inner and outer, result in a constant angle of incidence for both beams; this allows σo measurements at multiple (4 or 2) azimuth angles for the same point on the ocean surface. Each point in the inner swath is viewed twice at different azimuth angles by both beams. The region between the inner and outer swath is subjected to two measurements by only the outer beam, and the wind vector there can only be determined with a directional ambiguity of 180º.
Parameter | Inner beam | Outer beam |
Orbiting altitude | 720 km | |
Frequency | 13.515 GHz (Ku-band) | |
Wind speed range | 4-24 m/s with accuracy of 2 m/s (rms) | |
Wind speed accuracy | Better than 20 % (rms) | |
Wind direction accuracy | 20º (rms) | |
Resolution | 50 km x 50 km | |
Polarization | HH | VV |
Swath width | 1400 km | 1840 km |
Scanning circle radius | 700 km | 920 km |
Elevation angle (look angle) | 42.62º | 49.38º |
Incidence angle | 48.90º | 57.60º |
Footprint | 26 x 46 Km | 31 x 65 Km |
Scanning rate | 20.5 rpm | |

Due to the very low receiver bandwidth of ±800 kHz, a single-channel digital I/Q demodulation scheme has been implemented instead of the conventional analogue I/Q demodulator. This approach results in compact RF and digitizer hardware and offers better signal fidelity in handling low bandwidth signals.
For the OSCAT instrument, real-time onboard signal processing involving range compression is mandatory considering the global mode of sensor operation, as it reduces the effective output data rate of the sensor by a large factor (~50). Also, the Doppler shift computation and subsequent Doppler compensation (within ±550 kHz) will be carried out in the signal processor itself, prior to range compression. To extract the range information, FFT (Fast Fourier Transforms) are performed on the deramped signal and an average periodogram is formed by applying magnitude-squaring operations. The DSP (Digital Signal Processor) hardware is based on an FPGA implementation.
ADC quantization | 8 bit |
ADC sampling frequency | 62.5 MHz |
Decimation factor | 14/16 |
Transmit PRF | 100 Hz for each beam, 200 Hz for both beams |
Transmit pulse width | 1.35 ms |
Transmit modulation | LFM (Linear Frequency Modulation) |
Receive window | 1.835 ms, (4096 samples) |
Chirp signal bandwidth | 400 kHz |
Processing bandwidth | 250 kHz |
Noise bandwidth | 1350 kHz |
Doppler bandwidth | ±550 kHz |
Measurement bandwidth | 10 kHz |
Measured cell width | 8 km |
Output raw data rate | 14 Mbit/s |
Output processed data rate | 300-750 kbit/s |
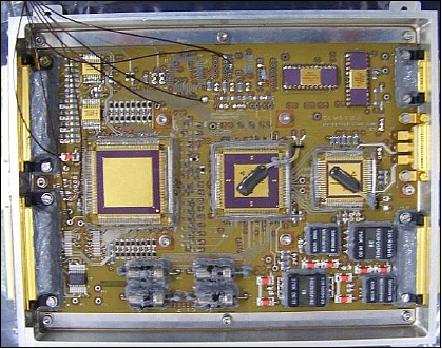
The OSCAT instrument employs linear chirp transmission and digital de-ramping receiver techniques to measure surface backscatter with better accuracy and without compromising on range resolution. It uses a digitally generated linear frequency modulation (LFM) transmit signal, having 400 KHz bandwidth and 1.35 ms pulse duration. The return echo signal is subsequently processed by a digital IF Receiver and signal processor based on a high-speed digitizer and FPGA (Field Programmable Gate Array).
The onboard range compression signal processing algorithm implemented in Xilinx XQVR600 FPGA is based on a periodogram estimation approach, where multiple 1K FFT of contiguous (50% overlapped) data partitions are averaged and binning is performed on the averaged spectrum to obtain signal+noise and noise-only energy estimates.
The digital receiver-signal processor hardware consists of a multi-layered PC Board called DACS (Data Acquisition and Range Compression System) module. It is based on Atmel's (Now E2V) TS8388B ADC and TS81102G0 Demux and Xilinx Virtex XQVR600 FPGA. The DACS unit has a mass of 2.25 kg and consumes 22.5 W of bus power.

ROSA (Radio Occultation Sounder for Atmospheric Studies)
ROSA is a new GPS occultation receiver provided by ASI (Italian Space Agency). An MOU (Memorandum of Understanding) between ASI and ISRO was signed in Fukuoka, Japan in Oct. 2005. The objective of ROSA is to characterize the lower atmosphere and the ionosphere, opening the possibilities for the development of several scientific activities exploiting these new radio occultation data sets. 42) 43) 44) 45) 46) 47) 48)
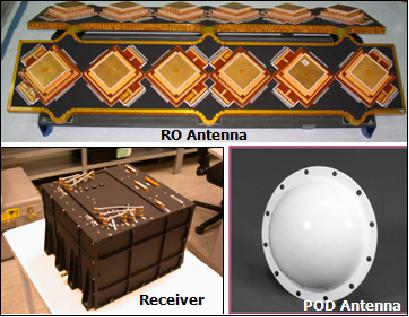
The ROSA instrument has been developed by TAS-I (Thales Alenia Space-Italia) formerly Laben. The ROSA payload is a dual-channel GPS receiver with two antennae and a receiver package. The accommodation of the ROSA instrument on board the OceanSat-2 spacecraft has been driven by the satellite configuration that allows the possibility to install only one radio occultation antenna in the flight direction of the spacecraft. This means that only rising occultation events can be detected by the ROSA instrument in this mission.
The radio occultation antenna, looking along the satellite velocity vector, receives signals from the 'rising' GPS satellites near the Earth's horizon. These signals get refracted by the atmosphere and from the bending angle, the temperature and humidity profiles are derived. The POD (Precise Orbit Determination) antenna, looking at the zenith of the satellite, gives the precise position of the receiver.
Frequencies of operation | L1: 1560 - 1590 MHz; |
GPS codes used | C/A and P code |
Dual-frequency channels (navigation) | 16 max (without observation mode) |
Dual-frequency channels (observation) | 8 |
Doppler shift | ± 50 kHz |
Antenna gain | + 5 dBi for navigation antenna |
Polarization | RHCP |
Horizontal resolution | < 300 km for temperature and humidity |
Vertical resolution | 0.3 km (low troposphere), 1-3 km (high troposphere) |
Accuracy | < 1.0 K temperature |
Input signal range | 127 to -133 dBm POD antenna |
Instrument mass, power | 17 kg, 36 W (standby) and 38 W (operation) |
Data interface | Data/Command: MIL-STD-1553B |
Dimensions | Receiver: 287 mm x 250 mm x 206 mm |
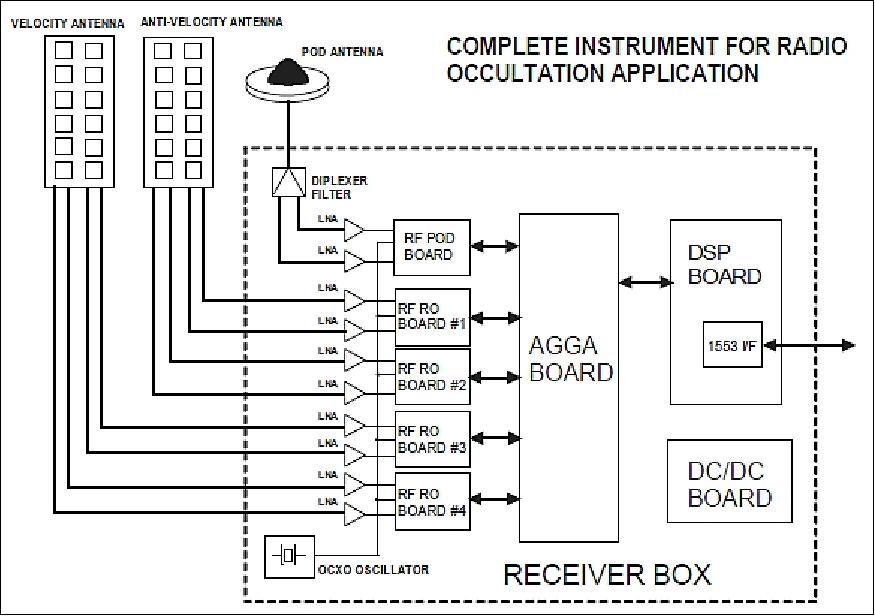
The ROSA instrument, in its complete configuration, is composed of the following parts:
• One hemispherical-coverage navigation and POD (Precise Orbit Determination) antenna to acquire GPS signals to determine the position, velocity and time of the LEO satellite.
• Velocity and anti-velocity radio occultation antennas to acquire GPS signals used in the calculus of all parameters used in the atmospheric sounding (for the complete instrument).
• The receiver unit which processes L1CA and L2P(Y) codeless GPS signals from all the antennas. 16 dual-frequency channels (implemented in 4 AGGA-2 chips) are available in the ROSA receiver and can be assigned to different combinations of GPS satellites and POD or RO antennas. A MIL-STD-1553 communication interface is used to exchange telecommand, telemetry and measurement data with the satellite on-board computer.
• The receiver processing is performed by an ADSP-21020 (Analog Devices Signal Processor-21020).
The radio occultation data processing for the ROSA receiver, which is called ROSA-ROSSA (ROSA-Research and Operational Satellite and Software Activities), has been supported by the Italian Space Agency and has been developed by a pool of Italian Universities and Research Centers. 49)
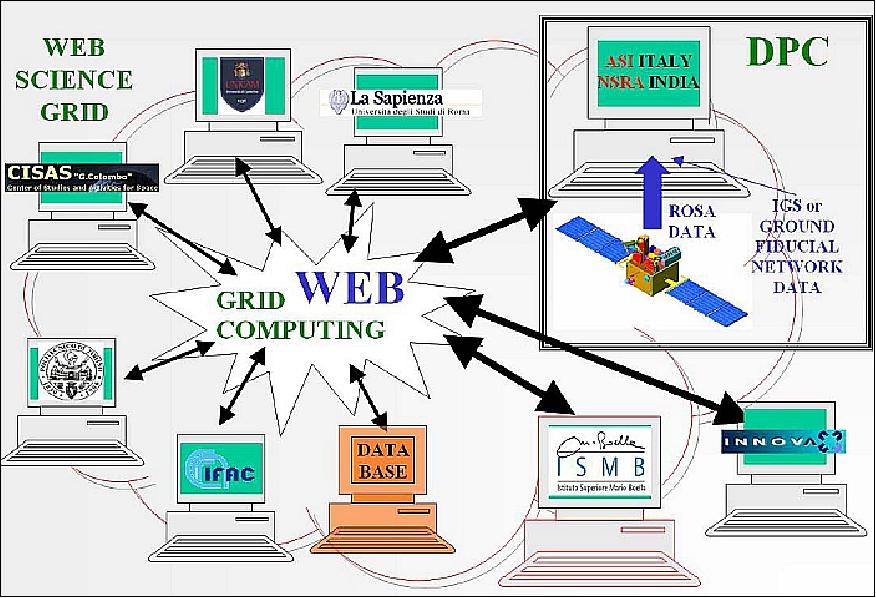
The ROSA data will be downlinked to the Indian and the Italian receiving stations - to be processed by the ROSA ground segment, completely developed by Italian universities and research centres (Figure 26). In particular, this ground segment will be implemented at the first level in an integrated computing infrastructure installed in Matera (Italy) and mirrored at Hyderabad, India and, at a second level, on a distributed software and hardware infrastructure. This second infrastructure will perform the rapid POD (Precise Orbit Determination) and prediction, the unambiguous bending and impact parameters profiles extraction, the ionospheric correction and the stratospheric initialization, the refractivity, pressure, temperature and humidity profile retrieval, the value-added services for meteorology, climate and space weather applications. This will identify a prototype of distributed and Multimission Ground Processing Center distributed through the various research centres and universities involved, connected through a Web-based GRID computing infrastructure.
The ROA (ROSA Occultation Antenna) accommodation has been driven by the presence of the scatterometer by tilting 15º on the satellite yaw axis. Moreover, in January 2010 ISRO decided to rotate on the yaw axis in the same direction as the other 20º for mission operation reasons. This final accommodation of the ROA antenna affects the number and type of occultation events that can be detected with respect to the optimal, velocity-pointing, configuration (Ref. 47).
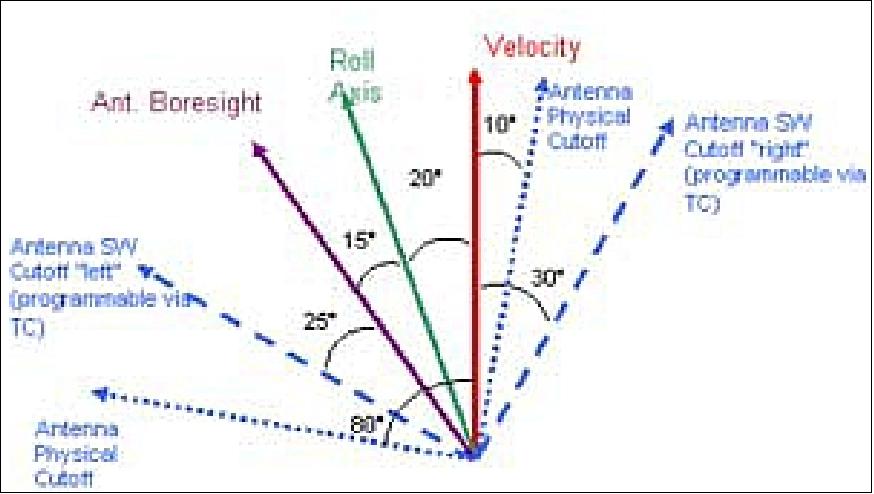
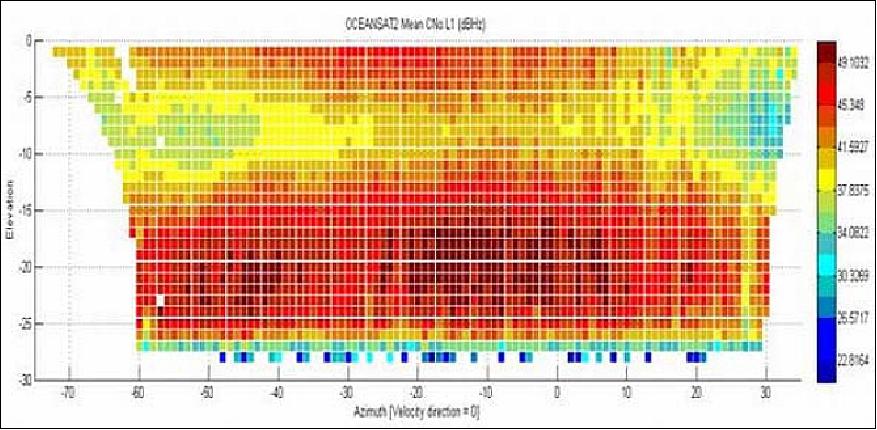
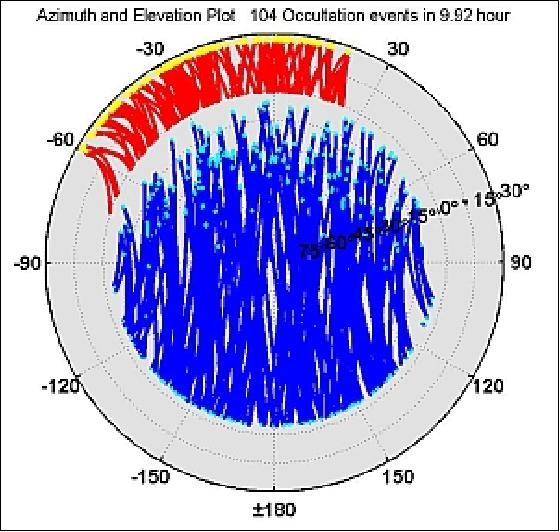
The quantity and quality of the occultations have been affected by the tilting of the ROA antenna of 35º on the yaw axis which moreover introduces a multipath effect due to the structure of the scatterometer and solar panel. These effects are visible in the following figures that represent the C/No vs azimuth/elevation (Figure 23) and the polar plot of the satellite visibility (Figure 24). The C/No plot shows the presence of two lateral sides with a lower gain due to multipath effects.
The polar plot shows how the visibility for occultation events (yellow and red) is restricted from -60º to +20º in azimuth, where 0º is the velocity direction. The yellow lines represent the occultation events, and the red lines represent the Svs rising until reaching 0º of elevation. The blue lines are the satellites tracked by the POD antenna.
The number of occultations per day is also affected by the ROA direction:
~300 occultations/day are expected for a field of view of 90º, while the average value for ROSA on OceanSat-2 is about 255 occultation/day. This number is in line with the expectations for ROSA on OceanSat-2.
ROSA is flown on board of the following three missions: 50) 51)
1) OceanSat-2 of ISRO, launched on Sept. 23, 2009.
2) SAC-D of CONAE and NASA, launched on June 10, 2011.
3) Megha Tropiques of ISRO and CNES, launched on Oct. 12, 2011.
Legend to Figure 25: The OceanSat-2 tailoring features only one occultation antenna (the velocity antenna).
Ground Segment
The existing ISTRAC stations at Lucknow, Bearslake, Mauritius and Biak will be used for TT&C (Telemetry Tracking and Command) support under the control of SCC which will carry our mission operations, satellite health monitoring and analysis, and payload operations scheduling/programming (Ref. 3).
The NRSA (National Remote Sensing Agency) DRS (Data Reception Station) is located at Shadnagar, Hyderabad with minor augmentation will receive the payload data both in real-time as well as in playback from the onboard memory. The received data will be separated instrument-wise (OCM-2, OSCAT, ROSA)) and recorded on the RAIDS (Redundant Array of Independent Disk Storage) memory of the DAQLB (Data Acquisition and Quicklook Browsing) system. Quicklook display, browse generation, calibration analysis and ADIF (Auxiliary Data File) generation will be carried out here. The data will be transferred to Balanagar on a high-speed data link in offline mode.
Data processing and products generation:
- The DPS (Data Processing System) at Balanagar will be the nodal centre for processing the data from OceanSat-2, with support from SAC (Space Applications Center), Ahmedabad. The DPS is in charge to process the raw science data and generating the ocean colour data products with in-built work order generation, online quality control, output media preparations, data quality evaluation, and feedback to mission operations.
- Associated development of mathematical formulations, geometric and radiometric look-up tables and their update, associated software tools and geophysical model functions for wind vector derivation from the OSCAT data are part of the overall data products generation at different levels.
OceanSat-2 will provide two types of science data: LAC (Local Area Coverage) at 360 m resolution, and GAC (Global Area Coverage) at 1 km and at 4 km resolutions.
On Sept. 12, 2011, a new state-of-the-art OceanSat-2 ground station (data reception and processing system) was inaugurated in Hyderabad. The OceanSat-2 ground station, fitted with a 7.5 m diameter antenna, is capable to cover an area of 5,000 km in diameter, covering the Bay of Bengal on the east and the Arabian sea in the west. The ground station was established to receive and process data from Ocean Colour Monitor on-board the Indian Remote Sensing Satellite Oceansat-2 in real time. 52)
References
1) Information provided by V. Jayaraman of ISRO HQ, Bangalore, India
2) P. S. Desai, H. Honne Gowda, K. Kasturirangan, "Ocean research in India: Perspective from space," Current Science, Vol. 78 No. 3, Feb. 2000, pp, 268-278
3) V. Jayaraman, "OceanSat-2 brochure," ISRO, 2007, URL: http://www.ioccg.org/sensors/OCEANSAT_2.pdf
4) "A special issue on OceanSat-2,"NNRMS (National Natural Resources Management System) Bulletin 34, Bangalore, India, March 2010, URL: http://www.isro.org/newsletters/contents/nnrms/NNRMS2010.pdf
5) S. K. Shirakumar, "OceanSat-2 Mission," 47th Session of STSC-UNCOPUOS, Vienna, Austria, February 08-19, 2010, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2010/tech-47.pdf
6) "OcenSat-2 brochure," ISRO, URL: http://www.isro.org/pslv-c14/pdf/Oceansat-2-Brochure-1.pdf
7) "ISRO successfully launches OceanSat-2, 6 nanosats in 20 minutes," Sept. 23, 2009, URL: http://www.indianexpress.com/news/isro-all-set-to-launch-oceansat2-satellite/520545/
8) http://www.isro.org/satellites/oceansat-2.aspx
9) N. V. Vighnesam, Anatta Sonney, P. K. Soni, "OceanSat-2 Orbit Determination System Performance," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
10) "First release of the Oceansat-2 Scatterometer L2 25 km and 50 km winds data records are now available to users," EUMETSAT, 7 Sept. 2017, URL: [web source no longer available]
11) "Improved TPM online dissemination service available," ESA User Services News, 9 June 2017, URL: [web source no longer available]
12) Prakash Chauhan, "ISRO report on Ocean Color Activities," ISRO/SAC, IOCS-2017 (International Ocean Color Science Meeting) meeting, Lisbon, Portugal, May 15-18, 2017, URL: http://iocs.ioccg.org/wp-content/uploads/2017/05/wed-0945-isro-prakash-iocs-2017-s.pdf
13) "OceanSat-2 NRT data," ESA, 26 April 2016, URL: https://earth.esa.int/web/guest/-/oceansat-2-nrt-data-over-europe
14) Information provided by Somya S. Sarkar and Tapan Misra, Director of ISRO/SAC, Ahmedabad, India.
15) "CEOS EO Handbook-Agency Summary - ISRO," Updated for 2015, URL: http://database.eohandbook.com/database/agencysummary.aspx?agencyID=11
16) "OceanSat-2," ESA, URL: https://web.archive.org/web/20160311151102/https://earth.esa.int/web/guest/missions/3rd-party-missions/potential-missions/oceansat-2
17) Tapan Misra, A. S. Kiran Kumar, "Scatterometer and RISAT-1: ISRO's contribution to radar remote sensing," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
18) "Discontinuation of OSCAT Data Retrieval," NASA/JPL, April 10, 2014, URL: http://podaac-www.jpl.nasa.gov/announcements/2014-04-10_Discontinuation_of_OSCAT_Data_Retrieval
19) "Status of the wind scatterometer constellation," Presented to CGMS-42 Working Group III session, agenda item 2.2, URL: http://www.eumetsat.int/website/wcm/idc/idcplg?IdcService=GET_FILE&RevisionSelectionMethod=LatestReleased&Rendition-Primary&dDocName=CWPT_1152
20) "Discontinuation of OSCAT Data Retrieval," NASA/JPL, April 10, 2014, URL: http://podaac-www.jpl.nasa.gov/announcements/2014-04-10_Discontinuation_of_OSCAT_Data_Retrieval
21) "OSCAT50, status: discontinued," KNMI, URL: http://www.knmi.nl/scatterometer/oscat_50_prod/
22) "Assessing Haiyan's Winds," NASA Earth Observatory, Nov. 13, 2013, URL: http://earthobservatory.nasa.gov/IOTD/view.php?id=82375
23) D. Gowrisankar, "Global Applications of OceanSat-2," Proceedings of the 49th Session of UNCOPUOS-STSC (UN Committee on the Peaceful Uses of Outer Space-Scientific and Technical Subcommittee), Vienna, Austria, Feb. 6-17, 2012, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2012/tech-49E.pdf
24) Olivier Terzo, "The Italian ROSA Receiver on board the OceanSat-2 Indian Mission: ROSA-ROSSA Prototype Ground Segment: Data Processing Through Grid Computing Techniques," Seminar of Cloud Computing at INGV, Rome, Italy, March 6, 2012
25) "NASA/ISRO Image Shows Irene's Winds Before Landfall," NASA/JPL, August 27, 2011, URL: http://www.jpl.nasa.gov/news/news.cfm?release=2011-268
26) "NASA signs agreement with ISRO for use of Indian satellite," Washington D.C., November 19, 2009, URL: http://www.indianexpress.com/news/nasa-signs-agreement-with-isro-for-use-of-in/543640/
27) Serubson Soisuvarn, Khalil Ahmad, Zorana Jelenak, Joseph Sienkiewicz, Paul S. Chang, "NOAA Assessment of the OceanSat-2 Scatterometer," IOVWST (International Ocean Vector Winds Science Team) Meeting, Annapolis, MD, USA, May 9-11, 2011, URL: http://coaps.fsu.edu/scatterometry/meeting/docs/2011/First%20OSCAT-20Results/IOVWST2011_NOAA_OSCAT_rev5.pdf
28) http://www.knmi.nl/scatterometer/oscat_50_prod/oscat_app.cgi
29) "OceanSat-2 Wind Product User Manual," KNMI, Ocean and Sea Ice SAF, Dec. 2011, Version 1.0, URL: http://www.knmi.nl/publications/fulltexts/ss3_pm_oscat_1.0.pdf
30) V. S. Hedge, "OceanSat-2 Meeting Global Demand," 53rd Session of UNCOPUOS, Vienna, Austria, June 9-18, 2010, URL: http://www.unoosa.org/pdf/pres/copuos2010/tech-25E.pdf
31) Abhijit Sarkar, "Oceansat-2 Utilization Plan," User Interaction Workshop, February 3-4, 2010, NRSC Hyderabad, India
32) ISRO Press Release, Oct. 12, 2009, URL: http://www.isro.org/pressrelease/scripts/pressreleasein.aspx?Oct12_2009
33) Rangnath R Navalgund, "Ocean Colour Monitor on-board OceanSat-2:," 13th IOCCG Committee meeting, Paris, France, Feb. 12-14, 2008, URL: http://www.ioccg.org/sensors/Navalgund_OCM-2.pdf
34) "OCEANSAT-2: Announcement of Opportunity," March 2008, URL: http://cwc.osu.edu/funding/Revised_AO_29Mar08.pdf
35) Prakash Chauhan, Rangnath Navalgund, "Ocean Colour Monitor (OCM) onboard OCEANSAT-2 mission," URL: http://www.ioccg.org/sensors/OCM-2.pdf
36) K. R. Murali, "Preflight Spectral Calibration of Ocean Color Monitor Monitor-2," ISRO-NASA-NOAA Meeting, Ahmedabad, India, March 10-12, 2010
37) Prakash Chauhan, "Ocean Color Monitor On-Board OceanSat-2 : Geophysical Parameter Retrieval," Oceansat-2 OCM data User Interaction Workshop, NRSC, Hyderabad, Feb 3, 2010
38) Abhijit Sarkar, "Oceansat-2 Utilization Plan," User Interaction Workshop, February 3-4, 2010, NRSC, Hyderabad, India
39) S. Sethia, N. M. Desai, B. S. Kumar, J. G. Vachhani, V. R. Gujraty, "Signal Processor For Scatterometer Radar Onboard OceanSat-2 Satellite," Proceedings of IRSI 2005 (International Radar Symposium India 2005), Bangalore, India, Dec. 20-22, 2005
40) B. S. Gohil, A. Sarkar, A. K. Varma, Vijay K. Agarwal, "Wind vector retrieval algorithm for Oceansat-2 scatterometer," Proceedings of SPIE Vol. 6410, 'Microwave Remote Sensing of the Atmosphere and Environment V,' Azita Valinia, Seiho Uratsuka, Tapan Misra, Editors, 64100U, Dec. 8, 2006
41) Nilesh M. Desai, B. Saravana Kumar, RiteshKumar Sharma, Ramesh Gameti,, Shalini Gangele, Abhishek Kunal, J. G.Vachhani, Deepak Putrevu, "Onboard Signal Processors for ISRO's Microwave Radars," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.4.12
42) A. Zin, S. Landenna, I. Rossi, L. Scaciga, S. Zago, G. Perona, R. Notarpietro, F. Vespe, V. DeCosmo, "Rosa Radio Occultation Sensor: Testing, Performance And Accommodation Aspects On Board Oceansat-2," European Navigation Conference 2008, (ENC 2008), April 23-25, 2008, Toulouse, France
43) V. de Cosmo, V. Catalano, L. Garramone, R. Loizzo, M. Marzo, K. Thyagarajan, M. Venkatarao,F. Vespe, "ROSA on OceanSat-2," Proceedings of SPIE, `Remote Sensing of the Atmosphere and Clouds,' Si-Chee Tsay, Teruyuki Nakajima, Ramesh P. Singh, R. Sridharan, editors, 640802, Vol. 6408, Nov. 28, 2006, doi:10.1117/12.693859, part of Asia-Pacific Remote Sensing, Conference, Panaji, Goa, India, Nov. 13-17, 2006
44) G. Perona, A. Sutera, M. Petitta, A. Speranza, N. Tartaglione, M. Materassi, R. Notarpietro, S. Casotto, F. Vespe, "ROSA - The Italian Radio Occultation Mission on-board the Indian OceranSat-2 Satellite," 3rd International Workshop on Occultations for Probing Atmosphere and Climate (OPAC-3), Graz, Austria, Sept. 17-21, 2007
45) http://www.asi.it/en/activity/earth_observation/rosa_
46) http://www.asi.it/Rosa/RosaEN/ROSA.htm
47) A. Zin, S. Zago, S. Landenna, L. Scaciga, E. Mangolini, F. Belgiovane, L. Marradi, V. DeCosmo, V. Catalano, "Current Achievements and Future Evolution of the ROSA Radio-Occultation Receiver," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and Europen Workshop on GNSS Signals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
48) Giovanni Perona, Riccardo Notarpietro, Marco Gabella, "GPS radio occultation on-board the OCEANSAT-2 mission: An Indian (ISRO) – Italian (ASI) collaboration," Indian Journal of Radio Space Physics, Vol. 36, October, 2007, pp. 386-393, URL: http://nopr.niscpr.res.in/bitstream/123456789/2927/1/IJRSP%2036%285%29%20386-393.pdf
49) G. Perona, R. Notarpietro, M. Molinaro, S. Casotto, P. Zoccarato, A. Nardo, M. Cucca, S. Paolella, I. Bordi, P. Sofi, A. Sutera , N. Tartaglione, A. Speranza, B. Nava, S. Radicella, M. Materassi, O. Terzo, L. Mossucca, A. Gallipoli, F. Tataranni, V. De Cosmo, V. Catalano, "Radio Occultation with ROSA on-board OcenSat-2: Mission Overview and First Results," OPAC 2010 (Occultations for Probing Atmosphere and Climate), Graz, Austria, Sept. 6-11, 2010, URL: http://www.uni-graz.at/opac2010/pdf_abstracts/opac_2010_perona_giovanni_abstract33.pdf
50) A. Zin, S. Zago, E. Mangolini, S. Landenna, L. Marradi, S. Radicella, B. Nava, R. Notarpietro, V. Catalano, "The ROSA Radio Occultation Project," Proceedings of NAVITEC 2012, 6th ESA Workshop on Satellite Navigation Technologies, ESA/ESTEC, Noordwijk, The Netherlands,Dec. 5-7, 2012
51) Vittorio De Cosmo, Valeria Catalano, Stefano Landenna, Luciano Garramone, Loredana Bruca, "ROSA on Aquarius/SAC-D," SAC-D CDR (Critical Design Review), Buenos Aires, Argentina, July 21-24, 2008, URL: http://www.conae.gov.ar/satelites/ROSA.pdf
52) "Oceansat-2 ground station inaugurated in Hyderabad," Sept. 12, 2011, URL: http://articles.economictimes.indiatimes.com/2011-09-12/news/30145212_1-oceansat-2-ocean-colour-monitor-incois
53) Massimo Materassi, "Use of ROSA data in Space Weather," Chicago, Aug. 7-16, 2008, URL: https://web.archive.org/web/20110603200632/http://www.ips.gov.au/IPSHosted/NCRS/commg_ursi2008/oral/gf_2_materassi.pdf
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to Top