PACE (Platform for Attitude Control Experiments)
Mission complete
Technology and Research
Technology Development
Quick facts
Overview
| Mission status | Mission complete |
| Launch date | 19 Jun 2014 |
| End of life date | 19 Jul 2014 |
PACE (Platform for Attitude Control Experiments)
PACE is a student developed nanosatellite demonstration mission of the National Cheng Kung University (NCKU) in Tainan, Taiwan. The mission objective of PACE is the verification and performance evaluation of different attitude determination and control strategies, as applied to nanosatellites and CubeSats. In addition, the mission goal is also to space-qualify the spacecraft itself, of which most subsystems and components have been developed specifically for this mission.
Stimulated by the CubeSat standard and a university course on space system engineering, the Department of Astronautical and Aeronautical Engineering and the Department of Electrical Engineering of the NCKU had established a joint laboratory in 2003, labeled PACELAB, to pursue the development of satellite components and systems.
Students of the PACELAB research laboratory at NCKU carry out the development of the electronic boards, the mechanical parts and embedded flight software. Several Master theses and internships have been written in the frame of this project, with international contributions from students coming from France, Peru, Malaysia and Germany. 1) 2) 3) 4) 5)
Spacecraft
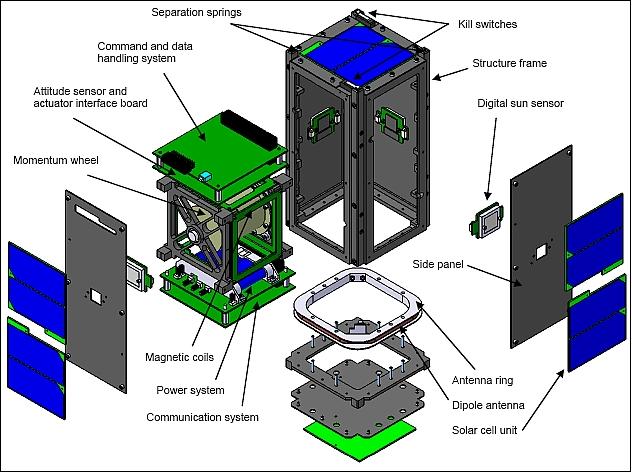
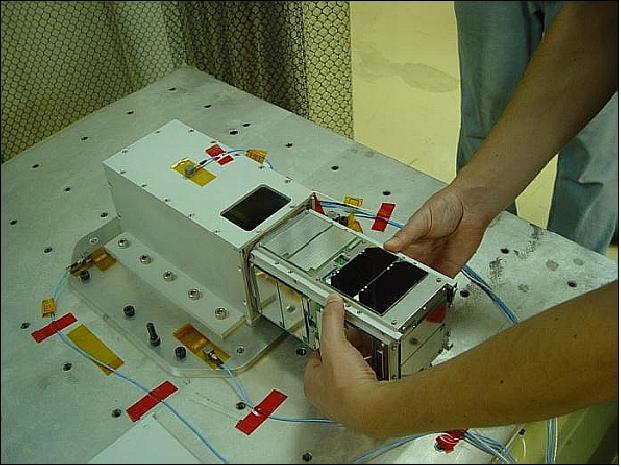
The PACE nanosatellite is a 2U CubeSat standard and uses mostly COTS (Commercial off-the-Shelf) components as well as in-house developed parts, to reduce the costs of the spacecraft. The dimensions of the satellite are 100 mm x 100 mm x 243 mm with a mass of < 2 kg.
The satellite structure is entirely made from machined Al-6061, a lightweight structure offering a rigid housing for all subsystems. The main structure is completely demountable to facilitate a comfortable spacecraft assembly. A secondary structure is integrated to mount the attitude actuators. The hard-anodized corner bars are the gliding guidance for the ejection from the storage container. These bars also include the shutdown switch mechanism, which keeps the satellite unpowered during launch. The structure is completed with an antenna ring and an enclosing bottom frame.
EPS (Electric Power Subsystem). Mounted on the side panels are high-efficient GaAs solar panels that are wired to the inside of the satellite. On the power system board, the energy input from the solar cells is converted into a regulated voltage level, which is used for supply of the main power bus and for charging the two Lithium-ion batteries. During an eclipse phase of the orbit, the main power bus, which provides a stable 3.3 V and 5 V to the satellite electronics, is supplied directly from the batteries.
RF communications: Use of a TNC (Terminal Node Controller) device for the packet protocol and the beacon signal. For command uplink and data downlink AX.25 packets are sent with 1200 baud using the UHF frequency. In addition, a Morse code beacon, containing identification and system status information, is sent periodically to facilitate satellite tracking and status monitoring. The system is connected to the dipole antenna that is stowed around the antenna ring while in launch configuration. When in orbit, the deployment mechanism is triggered that unfolds the antennas for communication.
C&DH (Command and Data Handling) subsystem: Use of two processors, a real-time clock, and mass storage memory. Both processors can be software updated during mission operation and can be used as a redundant configuration. For the PACE mission, one processor runs the mission software and satellite health monitoring, whereas the other processor runs the attitude determination and control algorithms. Virtually all software parameters and settings of the satellite components can be changed in orbit, in order to better adapt the satellite to the space environment.
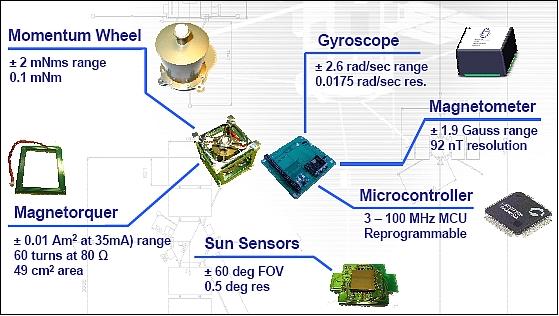
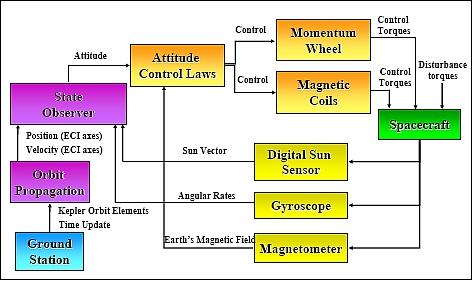
ADCS (Attitude Determination and Control Subsystem). The spacecraft is 3-axis stabilized. The ADCS board contains the attitude sensor and actuator interface assembly (actuator drivers and electronic circuits for sensor interfacing). The external components that are connected to the ADCS board are the four digital sun sensors, the magnetic coils, and the momentum wheel.
Spacecraft | - Mass: < 2 kg |
Structure and mechanisms | - Material: Al6061, anodized |
EPS (Electric Power Subsystem) | - Solar cells: 20 x Triple Junction GaAs |
ADCS (Attitude Determination and Control Subsystem) | - Magnetometer: 1.0 V/gauss, ±1.9 gauss |
C&DH (Command and Data Handling) subsystem | - Processor: 2 x C8051F120 microcontroller |
RF communication subsystem | - Type: Non-coherent, half-duplex, 20K00F1D |
Launch
PACE was launched on 19 June 2014 on a Kosmotras Dnepr launch vehicle from Yasni, Russia. The satellite was successfully deployed in its Sun-synchronous orbit, but no signals from PACE were received. 6)
Orbit: Sun-synchronous near-circular orbit, altitude of 600-800 km.
With the satellite health data that shall be obtained during the mission operations, it is planned to establish more confident simulation models for nanosatellites and/or CubeSats of similar configuration in LEO (Low Earth Orbit).
With the ability of the PACE processing hardware to upload new firmware to the processor during mission operation, different attitude control schemes can be tried out in orbit and their performances can then be evaluated. In other words, the PACE spacecraft shall serve as an in-orbit test platform for various attitude determination and control schemes that can then be used for future mission designs. It is also intended to allow other university groups and researches to evaluate newly developed control algorithms on PACE, which would otherwise be too costly or even impossible to simulate on Earth.
PACE will be the first indigenously designed university satellite of Taiwan sent into space.
References
1) Artur Scholz, J. J. Miau, J. C. Juang, “PACE Nanosatellite preparing for launch,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.6B.7
2) “PACE Nanosatellite Project,” URL: https://web.archive.org/web/20131110183509/http://satellite.ncku.edu.tw/pace/en/home.htm
3) Artur Scholz, Jiun-.Jih Miau, Jjyh-Ching. Juang, “PACE - Taiwan’s First Nanosatellite for Evaluation of Momentum-Biased Attitude Control,” Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009
4) Artur Scholz, Jiun-Jih Miau, Jyh-Ching Juang, Hung-Lin Chiu, “Development of miniature digital sun sensors at NCKU,” The Fourth Asian Space Conference 2008, Taipei, Taiwan, October 1-3, 2008
5) Artur Scholz, Jiun-Jih Miau, Jyh-Ching Juang, “Miniature Digital Sun Sensor for Application in Nano- and Picosatellites,” 2008 CubeSat Developers Workshop, San Luis Obispo, CA, USA, URL: https://userpages.umbc.edu/~martins/cubesat/sunsensor/1-Digital_SunSensor-Artur_Scholz.pdf
6) Gunter Krebs, “PACE,” Gunter's Space Page, URL: https://space.skyrocket.de/doc_sdat/pace.htm
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates. (eoportal@symbios.space)