PICASSO (Pico-Satellite for Atmospheric and Space Science Observations)
EO
Launched in September 2020, Pico-Satellite for Atmospheric and Space Science Observations (PICASSO) is a project of the European Space Agency (ESA) that aims to determine the ozone distribution in the stratosphere, the temperature profile up to the mesosphere and the electronic plasma characterization in the ionosphere. As a minisatellite demonstration mission, it is led by the Belgian Institute for Space Aeronomy (BISA), in collaboration with VTT Technical Research Center of Finland Ltd, Clyde Space Ltd. (UK) and the Centre Spatial de Liège (CSL), Belgium.
Quick facts
Overview
| Mission type | EO |
Summary
Mission Capabilities
There are two scientific instruments flown on board PICASSO, a Visible Spectral Imager for Occultation and Nightglow (VISION) and a Sweeping Langmuir Probe (SLP). VISION is a hyperspectral imager that targets the observation of the Earth’s atmospheric limb during orbital Sun occultation. Its secondary objective is to measure the deformation of the solar disk so that stratospheric and mesospheric temperature profiles are retrieved. VISION also provides occasional full-spectral observations of polar auroras.
SLP is designed to observe the electron density and temperature to investigate the ionosphere-plasmasphere coupling, study aurora structures, survey polar cap arcs and study ionospheric dynamics.
Performance Specifications
VISION produces stratospheric ozone measurements using the visible and the near-infrared spectrum with 5% accuracy and a vertical resolution of 2 km after post-processing. Developed by BISA, SLP operates with a sampling frequency of 50 Hz and a spatial sampling of 160 m.
PICASSO undergoes a sun-synchronous orbit with an altitude of 530 km with an inclination of 97.51°.
Space and Hardware Components
The PICASSO nanosatellite is built by AAC Clyde-Space Ltd. using a standard 3U CubeSat structure with a mass of approximately 3.8 kg. The orbital lifetime of the PICASSO mission is expected to be 29 months.
The communication system uses a VHF/UHF Transceiver (VUTRX) dedicated to TMTC (Telemetry and Telecommand) and an S-band Transmitter (STX) for high data-rate payload. VUTRX provides a VHF uplink and UHF downlink at 9.6 kbit/s, whilst STX provides a downlink and uplink at 2 Mbit/s.
PICASSO (Pico-Satellite for Atmospheric and Space Science Observations)
Spacecraft Launch Sensor Complement Ground Segment References
PICASSO is a project of ESA ( European Space Agency) led by BISA (Belgian Institute for Space Aeronomy), in collaboration with VTT Technical Research Center of Finland Ltd, Clyde Space Ltd. (UK) and the CSL (Centre Spatial de Liège), Belgium. The goal is to develop and operate a scientific 3U CubeSat. With a payload composed of two scientific instruments, it will contribute to the determination of the ozone distribution in the stratosphere, the temperature profile up to the mesosphere and the electronic plasma characterization in the ionosphere. 1) 2)
Objectives
Anticipating the fact that sensor miniaturization and tiny satellites will play an ever-increasing role in remote sensing and in situ measurements of the atmosphere of the Earth and of other celestial bodies, PICASSO has three strategic objectives:
1) To perform true science within a scope compatible with the technological constraints and current limitations of CubeSat technology
2) To anticipate the future of remote sensing and in situ measurements, for Earth and other planets, through miniaturization
3) To demonstrate that tiny satellites can achieve a very high ratio of “science data versus cost”.
The PICASSO flight aims at a polar orbit at 500 km, thus enabling a mission with a nominal lifetime of about two years. In addition, with an inclination of 98º, the coverage of the atmosphere will be almost complete.
PICASSO is a nanosatellite demonstration mission of BIRA initiated in 2010. It is currently administered by ESA within the frame of the General Support Technology Program (GSTP) and the Technology Research Program (TRP). In addition to BIRA, which acts as project prime and scientific PI (Principal Investigator) of the two instruments.
The PICASSO consortium includes three European partners: 3) 4) 5)
• AAC Clyde-Space Ltd. (Glasgow, UK), is in charge of the platform development, payload integration, the ground-based station6) and satellite control and monitoring
• VTT (Technical Research Center of Finland), Espoo, Helsinki, Finland, in charge of developing the VISION instrument
• The CSL (Centre Spatial of Liège), Belgium, responsible for the technical coordination and for the PA/QA (Product Assurance/Quality Assurance) aspects of the project.
PICASSO is an ambitious 3U CubeSat implementing a science mission aimed at studying ozone in the stratosphere, the air temperature profile up to the mesosphere, and the electron density and temperature in the ionosphere. The PICASSO next-generation mission allows mission-specific customization; a dedicated payload computer, to process and compress payload data for transmission; customized deployable solar panels, providing significant power generation in addition to enabling a minimized power system volume.
The mission will provide valuable scientific data from complex instruments and will serve as an indicator of the capabilities and value of a modern CubeSat mission, in addition to providing valuable Lessons Learned for future platform designs. As such, PICASSO will serve as an ESA in-orbit demonstrator of CubeSat technology and a trailblazer for small science missions.
Spacecraft
The nanosatellite is built using a standard 3U CubeSat structure of size 30 cm x 10 cm x 10 cm and a mass of ~3.8 kg. In this configuration, 1U volume is reserved for the payload accommodation. The orbital lifetime of the PICASSO mission is expected to be 29 months.
The platform parameters
• Triple unit CubeSat (one unit left for the payload)
• Four deployable 2-unit long solar panels
• Attitude control:
- Inertial flight, one face towards the Sun
- Pointing accuracy: ±0.5° (knowledge: ±0.2°)
- Magneto-torquers and three dynamical wheels
• Mass estimated at ~4 kg
• Power Budget: 9.7 W generated, 6.5 W consumed
• RF communications: (Uplink: VHF; downlink: UHF + S-band)
- Data transmissions of up to 204 MB/day
Platform:
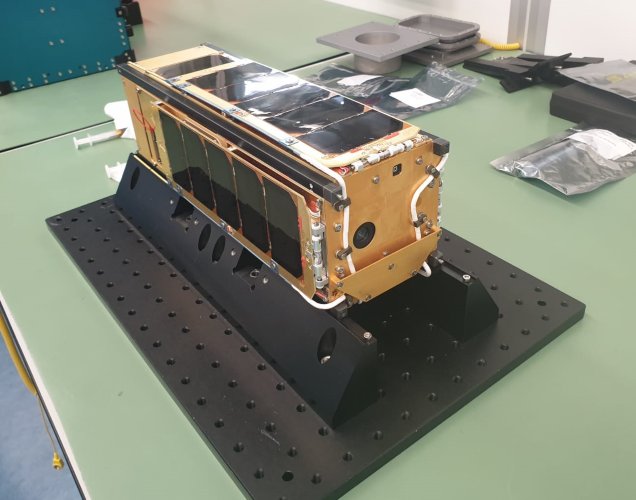
The complexities of the mission necessitated greater latitude for customization of the structure, and flexibility during integration. After a review of the structures commercially available at the time it was determined there was nothing that would be suitable for this mission. Clyde Space, therefore, designed a custom CubeSat structure (Figure 2), which has now been adapted for the wider commercial market in order to support other missions facing similar challenges. The structure allows the removal of individual faces while the inner stack remains in place.
The solar panels can also be removed without the need to remove end plates. A solid section in one panel provides enhanced radiation protection for VISION. The internal ribs allow the placement of the PC104 stack at any desired location within the structure. Similarly, customizable side plates permit the positioning of an antenna deployment module at any required location within the CubeSat. This structure is also very light, particularly given its strength, weighing 332 g including rails, end plates, ribs, rods, L-pieces and standoffs.

The platform features four deployable solar panels, UHF/VHF and S-band communications, two onboard computers, a high-performance ADCS (Attitude Determination and Control Subsystem), and two scientific instruments for ESA-grade science data.
The key pointing requirement for this mission is to ensure that the VISION instrument stays aligned to the Sun during the entire duration of the Sun’s occultations by the Earth’s atmosphere. This requires the pointing accuracy of VISION relative to the sun to be ≤1º. To meet this requirement, the ADCS must be able to have sufficient pointing knowledge and control performance to provide this resolution of control. In addition, the alignment between the ADCS and VISION must be measured and corrected.
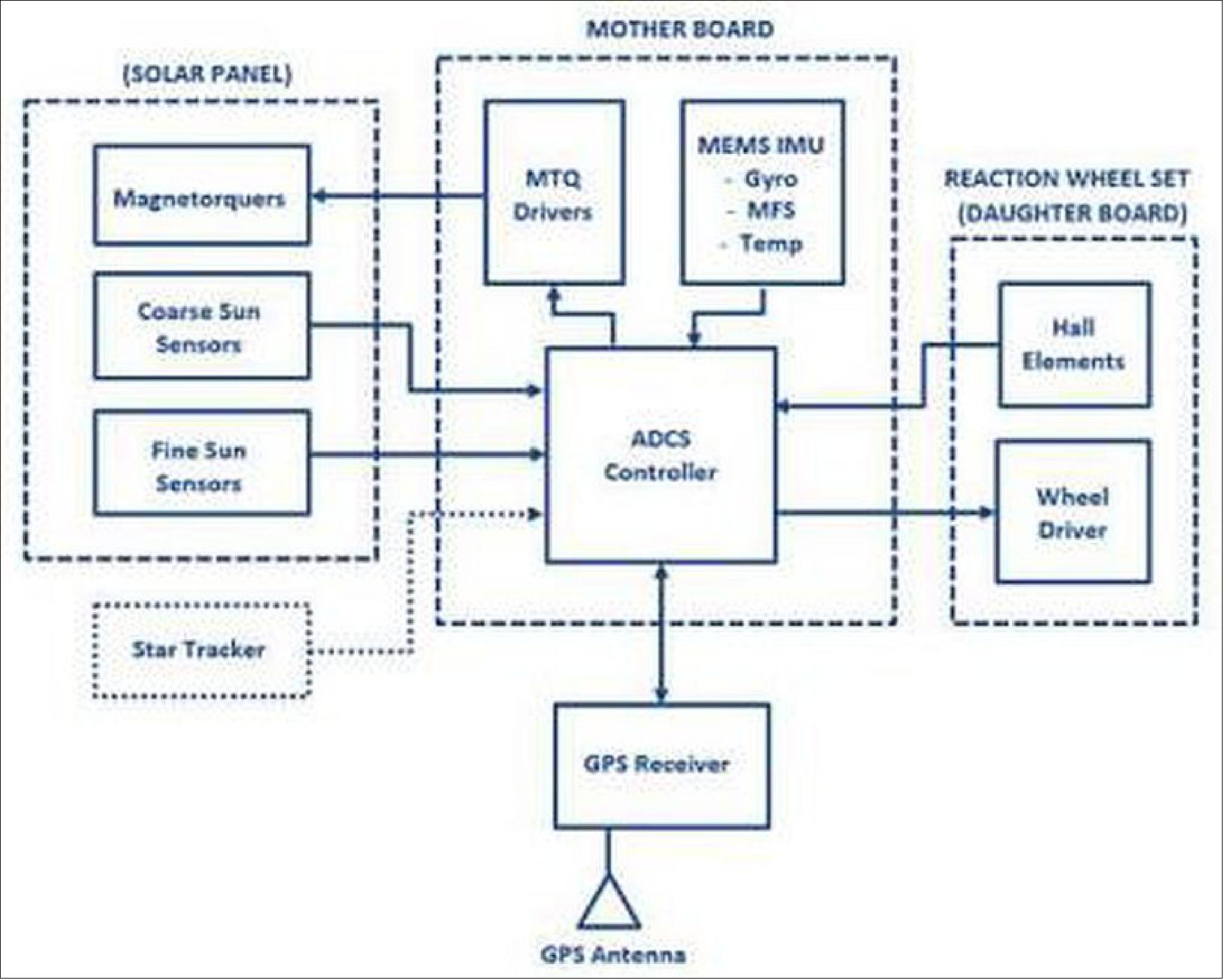
The ADCS subsystem architecture is illustrated in Figure 3. It includes:
• ADCS Motherboard (ADCS MB)
• Reaction wheelset (RWS)
• Fine Sun sensor (FSS)
• Coarse Sun sensors (CSS)
• Star tracker (STT)
• Magnetorquers (MTQ)
• GNSS system (GPS).
The ADCS motherboard benefits from the heritage of the ADCS board that has successfully flown on UKube-1. An FPGA-based processing architecture has been specifically selected to ensure a system that is more robust to radiation events. The central Actel FPGA interfaces to the sensors and actuators, while a secondary processor acts as a watchdog, can place the spacecraft into a safe mode and can also be used to provide emergency detumbling of the spacecraft should the need arise.
The ADCS will utilize the standard Clyde Space three-axis CubeSat reaction wheel system. Each reaction wheel is capable of providing a torque of up to 2mNm; however, for this mission, the torque is limited to 0.23 mNm in order to enable a finer pointing control. The wheels will provide a total angular momentum of 3.53 mNms in an angular velocity range of ± 7500 RPM.
The FSS is mounted on the Sun pointing face of the satellite and is used as the primary sensor during the sunlit period of the orbit, while the star tracker is used in support of orientation determination during an eclipse. The magnetometers are used to sense the magnitude and direction of the magnetic field on the body of the CubeSat.
Voice coils embedded into the solar panels represent the MTQ. These devices generate a magnetic dipole that interacts with the Earth’s magnetic field, generating a mechanical torque. These actuators are used to detumble the spacecraft, provide coarse pointing acquisition, and manage the RWS angular momentum.
The ADCS is validated during ground testing using Clyde Space’s HIL (Hardware-In-the-Loop) simulator. The complete HIL setup is a high fidelity, six degrees of freedom, spacecraft dynamical model interfaced directly with the ADCS hardware on which the attitude control algorithms run. The setup allows validation of the autonomous attitude control software and hardware for all phases of the mission.
Critically, real data from the sensors and actuators are used to simulate the entire mission. This allows many of the un-modelled dynamics that, because of the presence of unknown parameters, do not have clear mathematical formulations. These can include interference on the magnetometers from magneto-torquer output and magnetometer reading; reaction wheel velocity and gyros output; sensor noise and pointing accuracy; and others. Consequently, the use of this system-level HIL test vastly reduces the impact of the ‘non-ideal’ operation of system hardware on the performance of the ADCS control algorithms, and therefore de-risks the potential for attitude control problems on orbit.
EPS (Electric Power Subsystem):
Power conditioning is carried out using an off-the-shelf third-generation Clyde Space EPS (Figure 4), with 3 maximum power point tracking battery charge regulators providing protected primary power lines: 3.3 V at 4.5 A, 5 V at 4.5 A, 12 V at 1.5 A, and unregulated battery V at 4.5 A.
The system also incorporates the flight activation system of separation microswitches, and the flight interface with an external 5 V USB charge and remove before the flight pin. It also incorporates 10 power distribution switches to control the loads. The EPS board will be powered throughout the orbit, with a nominal consumption of 200 mW.

The EPS also makes use of a 30 Wh battery – another Clyde Space standard product with spaceflight heritage on numerous missions. Based on Lithium Polymer technology, the battery cells are arranged 2S3P, with a charging EoC voltage of 8.2 V.
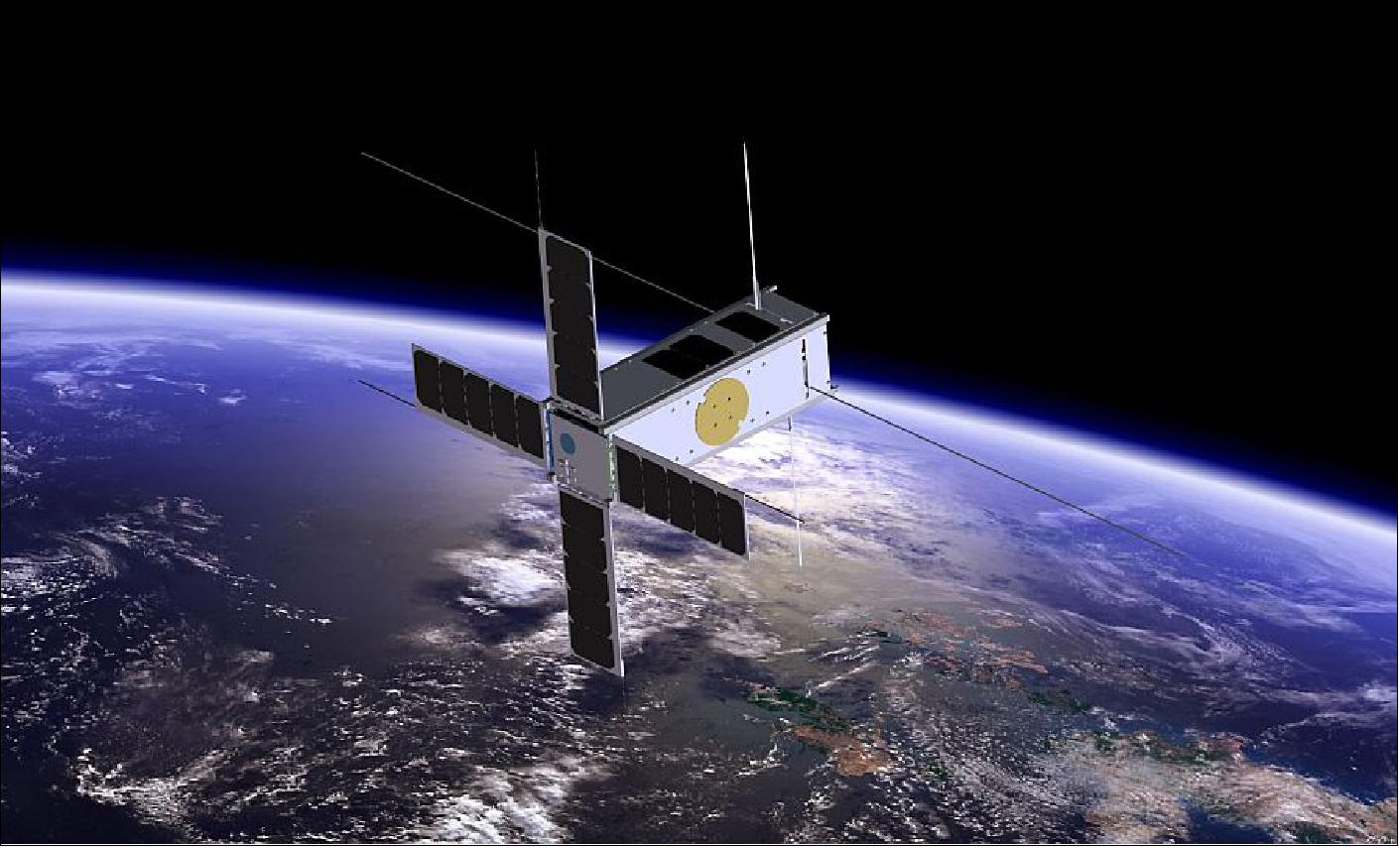
During sunlit periods, the solar panels shall generate power to run the platform and charge the battery. A modified version of the standard CS product, four 2U deployable solar panels are mounted to the structure on their short edge. Their deployed configuration is shown in Figure 1. These panels host the SLP (Sweeping Langmuir Probe) devices whose fixtures run alongside the solar cells. Body-mounted solar panels are also used to generate power from Earth’s albedo and to maximize power generation during tumbling.
In most cases, deployable solar panels would necessitate the use of a larger EPS variant, with a daughterboard featuring additional BCRs (Battery Charge Regulators) to accommodate the additional solar panels. However, given the complexity of the platform design, the volume within the spacecraft is at a premium. To address this, the solar panels will feature a custom string configuration and harnessing solution in order to eliminate the need for the additional daughterboard within the CubeSat stack.
CDHS (Command and Data Handling Subsystem):
There are two computers onboard PICASSO: the OBC (On-Board Computer) and PLC (Payload Computer). The OBC is the primary intelligence board and manages spacecraft operations. The PLC is dedicated to controlling the payloads and managing their data all the way to downlink.
The VISION instrument produces vast quantities of data, approximately 8 GB per observation. Transmitting the raw data in its entirety to the ground is infeasible with the anticipated link budget, so a high-performance secondary computer is incorporated on board, dedicated to processing the payload data prior to transmission.
The PLC uses a Xiphos Q7S processor card adapted for a CubeSat form factor, accommodating a Xilinx Zynq-7020 all-programmable system-on-chip with a dual-core ARM Cortex-A9 core clocked at 766 MHz. The card provides 512+256 MB of low power RAM and up to 32 GB of non-volatile storage on SD (Secure Digital)cards. Typical power consumption for the PLC is 1 W.
RF communications:
The satellite’s communication system is composed of two radios: The VHF/UHF Transceiver (VUTRX), which is mainly dedicated to TMTC (Telemetry and Telecommand), and the STX (S-band Transmitter) for high data-rate payload data downlink. The radios are connected to their respective antennas (deployable dipoles for the VUTRX, patch for the STX) and will communicate with dedicated antennas on the ground as depicted in Figure 5.
VUTRX uses an off-the-shelf CPUT (Clyde-Space UTRX half duplex UHF Transceiver), providing a VHF uplink and UHF downlink at 9.6 kbit/s both ways using modified CCSDS packets and multi-access protocols, providing down/uplink of 2.15 MB/day. When not transmitting, the transceiver enters a Morse Code Beacon mode and broadcasts identification and basic health data for tracking. The VU Transceiver interfaces to two VU Whip Antennas deployed from the ADM (Antenna Deployment Module).
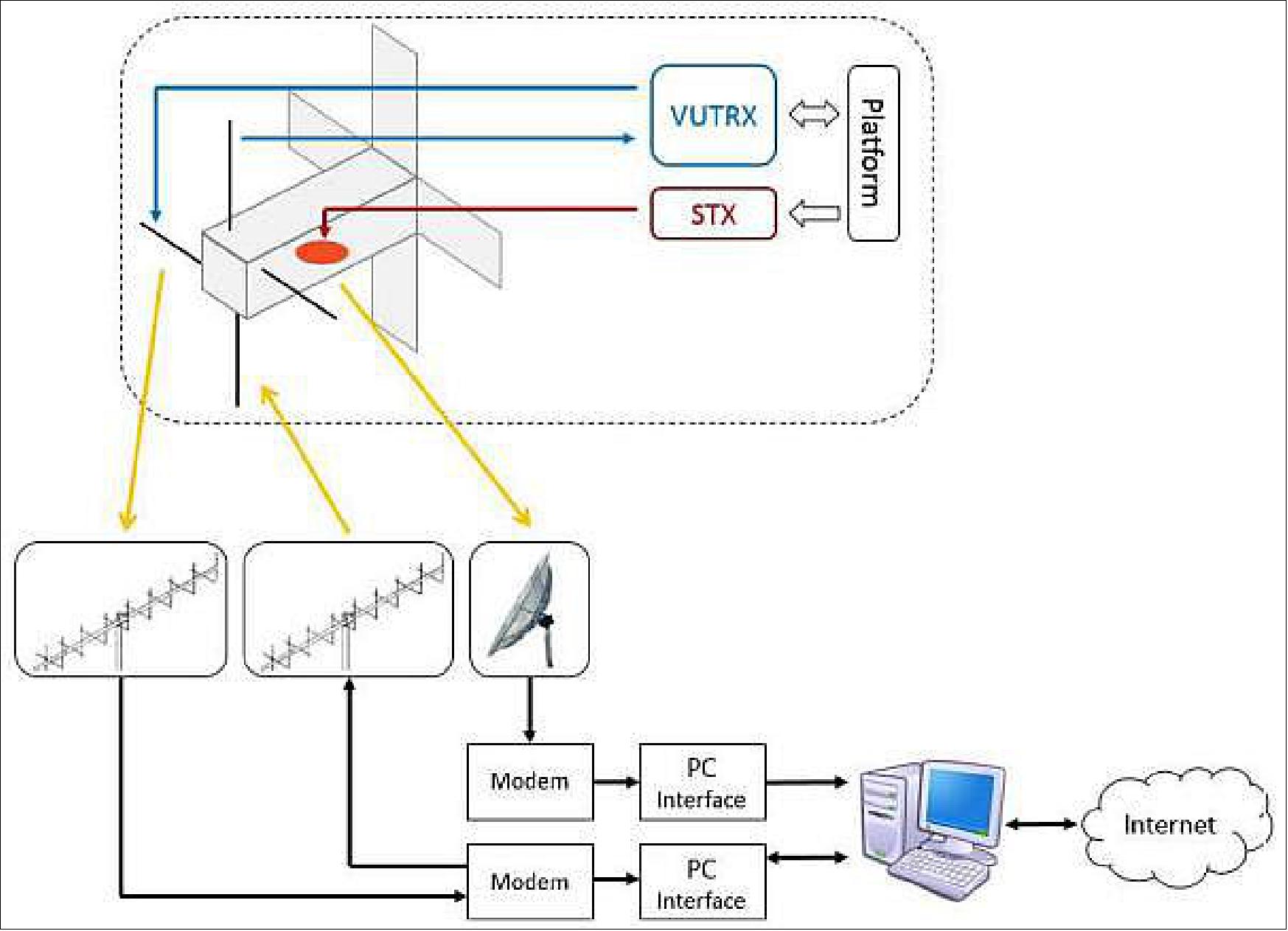
The high volume of data generated by the VISION instrument necessitates the use of greater downlink capabilities than provided by the VUTRX alone. A CPUT STX (S-band Transmitter), as flown on Clyde Space’s previous satellite UKube-1, was chosen to facilitate the high data-rate transfers of payload data as well as enhanced telemetry data. This provides downlink at variable rates up to 2 Mbit/s QPSK (Quadra-Phase Shift Keying), utilizing the Intelsat encoding standard and modified CCSDS packets. The transmitter shall interface to a 7 dBi S-band patch antenna (Figure 6) located on the Earth-facing side of the satellite.
The S-band system will enable a downlink of 102 MB/day in the spacecraft’s nominal sun-pointing mode. The satellite can also be reorientated into a ground station-pointing mode, to enable a downlink of up to 204 MB/day when required.

OBSW (On-Board Software):
The platform OBC runs the Bright Ascension Generation 1 Onboard Software. This component-based software has an underlying framework including OS and hardware abstract libraries, as well as support for FreeRTOS and POSIX/Linux. The software components support Clyde Space platform subsystems including integrated EPS, battery, solar panels, ADCS, VUTRX and the standard Clyde Space payload protocol. Activities including telemetry sampling, pooling, monitoring, logging, etc., as well as automated activities that are event-, time- or orbit-triggered, are also supported.
The PLC software is composed of the following modules:
• Main software process
• SLP control and processing
• VISION control and processing
• GPS interface
• OBC interface
• STX control and processing.
The ground segment for PICASSO is divided into two functional areas: the Mission Operations Control and the Scientific Control Center.
The Mission control centre will be supplied with the Bright Ascension Generation 1 Ground Software (GNDSW) developed in unison with the OBSW for harmonious integration. The GNDSW reaps heritage from UKube-1.
Development Status
• On March 16, 2020, Arianespace suspended all launch campaigns from CSG (Guiana Space Center) Kourou, due to the Covid-19 pandemic, and the need to fully implement the measures decided by the French government. 7)
- These launch preparations will resume as soon as allowed by health conditions. This exceptional measure is designed to protect the health of employees and the local population, while also maintaining the security needed to prepare for scheduled launches.
- Arianespace, the French space agency CNES and all companies involved at CSG are currently overseeing operations to place launchers and satellites in safe standby condition, in line with standard procedures.
• February 13, 2020: With only five weeks to go until launch, the picosatellite PICASSO, aimed at Earth observation and space science as the first CubeSat mission of the Royal Belgian Institute for Space Aeronomy, has been delivered to the European Space Agency (ESA) and was successfully integrated into its launch dispenser. PICASSO will be one of 42 tiny satellites launched simultaneously aboard an Arianespace Vega rocket on the 24th of March 2020, from ESA’s launch site in French Guiana. Carrying along two scientific instruments, PICASSO will measure the ozone distribution in the stratosphere, estimate the temperature profile up to the mesosphere, and characterise the plasma in the ionosphere. 8)
• February 5, 2020: AAC Clyde Space has delivered PICASSO, a 3U CubeSat, to the Royal Belgian Institute for Space Aeronomy at a facility in Delft for pod integration. The satellite is planned to be launched from French Guiana on an Arianespace Vega on the 24th of March 2020. 9)
- PICASSO will measure ozone distribution in the stratosphere, estimate the temperature profile up to the mesosphere, and characterize the plasma in the ionosphere. The Earth Observation mission is the result of an international collaboration, led by the Royal Belgian Institute for Space Aeronomy (BIRA-IASB), including AAC Clyde Space, ESA (European Space Agency), VTT Technical Research Center of Finland Ltd and the Centre Spatial de Liège in Belgium. PICASSO will demonstrate a scientific capacity for atmospheric remote sensing with VISION (the hyper-spectral imager) and in situ measurements with SLP (Sweeping Langmuir Probe). This capacity is also strategic for planetary exploration.
- AAC Clyde Space built and integrated the gold-plated satellite that will take measurements from low earth orbit for 2 years. The satellite carries two scientific payloads: a hyper-spectral imager in the visible, that will primarily map the ozone in the stratosphere, and a Sweeping Langmuir Probe that will measure electron density and temperature in the plasma around the satellite. Ozone in the high atmosphere is critical for life on Earth as it shields the Sun's UV radiation, so accurate and timely information about its density is critical for humanity. PICASSO aims to show that such measurements can be successfully done with very small satellites.
- "This ambitious mission will give novel opportunities to the scientific community to study our planet, and in turn make better informed decisions. We are delighted to deliver this innovative CubeSat to our customer and look forward to controlling and tracking PICASSO on orbit using our purpose-built ground station, keep your eyes peeled for updates," said AAC Clyde Space CEO Luis Gomes.
- "The PICASSO mission will demonstrate that CubeSats, and more generally small satellites, have reached the technological maturity necessary to turn them into actual scientific tools worth consideration by the Earth Observation community. Thanks to their low cost, which enables them to be deployed as a fleet, they will provide scientific-grade data with a high repetition rate and an unequaled ground coverage." said BIRA-IASB Project Manager Didier Pieroux.
Launch
The PICASSO 3U CubeSat was launched as a passenger payload at 01:51 UTC, 03:51 CEST on 3 September 2020 (22:51 local time on 2 September in Kourou). The launch vehicle was the VEGA SSMS (Small Spacecraft Mission Service) Proof Of Concept flight. 10)
Orbit:
Sun-synchronous orbit; target orbit for the 7 microsatellites: altitude of 515 km, inclination of 97.45º; target orbit for the 46 nanosatellites: altitude of 530 km, inclination = 97.51º. The nominal mission duration (from liftoff to separation of the 53 satellites) is 1 hour, 44 minutes and 56 seconds.
Passenger Payloads (53) of the Vega Rideshare Mission
Arianespace has realized the first European “rideshare” mission for small satellites, with 53 satellites onboard the Vega launcher for 21 customers from 13 different countries. With this new SSMS (Small Spacecraft Mission Service) shared launch concept, Arianespace demonstrates its ability to respond – in an innovative and competitive manner – to institutional and commercial requirements of the growing market for small satellites. The total satellite launch mass was 1,327 kg. 11)
With the demonstration of its new SSMS service, Arianespace is strengthening its position in the growing market for small satellites. This service will soon be supplemented by the MLS (Multi Launch Service) – a similar offer available on Ariane 6, allowing Arianespace to increase the number of affordable launch opportunities for small satellites and constellations.
• ESAIL is a maritime microsatellite with a mass of 112 kg for AIS (Automatic Identification System) ship tracking operated by exactEarth. It was built by a European manufacturing team led by the satellite prime contractor Luxspace. ESAIL features enhanced multiple antenna-receiver configurations for global detection of AIS messages and high-resolution spectrum capture, which will enable the demonstration of advanced future services such as VDES (VHF Data Exchange System) message reception. 12)
• Lemur-2, eight 3U CubeSats built by Spire Global Inc., San Francisco, CA. These satellites carry two payloads for meteorology and ship traffic tracking. The payloads are STRATOS GPS radio occultation payload and the SENSE AIS payload.
• TriSat is a 3U CubeSat (5 kg) imaging mission led by the University of Maribor, Slovenia. The mission is focused on remote sensing by incorporating a miniaturized multispectral optical payload as the primary instrument, providing affordable multispectral Earth observation in up to 20 non-overlapping bands in NIR-SWIR (Near to Short Wave Infrared) spectrum.
• The launch integrator company Spaceflight Inc. of Seattle WA is providing its services for four different customers with a total of 28 satellites.
These are:
• NewSat-6 (also written as ÑuSat-6), is a low Earth orbit commercial remote sensing microsatellite (43.5 kg) designed and manufactured by Satellogic S.A. with HQs in Argentina, a vertically integrated geospatial analytics company that is building the first Earth observation platform with the ability to remap the entire planet at both high-frequency and high-resolution. This is Satellogic’s 11th spacecraft in orbit, equipped with multispectral and hyperspectral imaging capabilities and it will be added to the company’s growing satellite constellation. —
The spacecraft is named "Hypatia" after the philosopher, astronomer, and mathematician (350-415 A.D.) who lived in Alexandria, Egypt, and was a symbol of learning and science. She was renowned in her own lifetime as a great teacher and a wise counselor and became seen as an icon for women's rights and a precursor to the feminist movement. In line with Satellogic's NewSats already in orbit, Hypatia is equipped with sub-meter multispectral and 30 m hyperspectral cameras. This NewSat Mark IV is also equipped with new technologies in service of Satellogic's research and development of Earth-observation capabilities. Upon successful commissioning, these new capabilities will be available to existing Satellogic customers.
• 4 Flock-4v, 3U CubeSats, next-generation SuperDove satellites of Planet Inc., San Francisco, they will join its constellation of 150 Earth-imaging spacecraft.
• SpaceBEE, 12 (.25U) picosatellites of Swarm Technology which provide affordable global connectivity.
• Tyvak-0171, an undisclosed minisatellite of Tyvak, developed by Maxar with a mass of 138 kg.
• Planet Inc. of San Francisco launches a total of 26 Flock 4v SuperDoves on this mission. They will be split into two batches on the same launch: 14 of them will be housed inside and deployed from ISL’s QuadPack deployers and the remaining 12 will be deployed from D-Orbit’s InOrbit Now (ION) free-flying deployment platform. 13)
• Athena, a communications minisatellite mission (138 kg) of PointView Tech LLC, a subsidiary of Facebook. The objective is to provide broadband access (internet connectivity) to unserved and underserved areas throughout the world.
• AMICalSat, a 2U CubeSat, an educational mission, developed by CSUG (University of Grenoble Alpes, France) and MSU-SINP (Lomonosov Moscow State University-Skobeltsyn Institute of Nuclear Physics, Russia). The objective is to take pictures of the Northern light in order to reconstruct the particle precipitation in the polar atmosphere.
The payload is a very compact, ultra-sensitive wide filed imager (f=23mm, aperture f/1.4). Firstly, AMICal Sat will observe auroras using nadir pointing, i.e. by determining the centre of the Earth to map and link the geographical position of the auroral oval and its internal structures with solar activity. Secondly, the CubeSat will perform image capture ‘in limbo’ through tangential orientation with the Earth to capture the vertical profile of the auroras and match an altitude to their various emissions.
• PICASSO, a 3U CubeSat mission (mass of 3.8 kg) developed for ESA ( European Space Agency) led by BISA (Belgian Institute for Space Aeronomy), in collaboration with VTT Technical Research Center of Finland Ltd, Clyde Space Ltd. (UK) and the CSL (Centre Spatial de Liège), Belgium. The goal is to develop and operate a scientific 3U CubeSat.
• GHGSat-C1 of GHGSat Inc., Montreal, Canada, is the first of two nanosatellites (~16 kg) as the commercial follow-on to the GHGSat-D (CLAIRE) demonstration satellite developed and launched by UTIAS/SFL of Toronto in 2016. GHGSat monitors industries' greenhouse gas (GHG) and air quality gas (AQG) emissions, including:
- oil & gas,
- power generation,
- mining,
- pulp & paper,
- pipelines (natural gas),
- landfill,
- chemicals,
- metals & aluminium,
- cement,
- agriculture,
- transportation.
• NEMO-HD of SPACE-SI (Slovenian Center of Excellence for Space Sciences and Technologies) is a microsatellite (65 kg) developed at UTIAS/SFL of Toronto, Canada in cooperation with SPACE-SI. The NEMO-HD (Next-generation Earth Monitoring and Observation-High Definition) satellite is a high-precision interactive remote sensing mission for acquiring multispectral images and real-time HD video.
• FSSCat (Federated Satellite Systems on Cat) is the winner of the 2017 Copernicus Master “ESA Sentinel Small Satellite Challenge (S3)”. Proposed by the Universitat Politèctica de Catalunya (UPC) and developed by a consortium composed of UPC (ES), Deimos Engenharia (PT), Golbriak Space (EE), COSINE (NL) and Tyvak International (IT).
• Phi-Sat-1 (Φ-Sat-1) is the first on-board ESA initiative (6U CubeSat) on Artificial Intelligence (AI) promoted by the Φ Department of the Earth Observation Directorate and implemented as an enhancement of the FSSCat mission. Among mission objectives, scientific goals are Polar Ice and Snow monitoring, soil moisture monitoring, terrain classification and terrain change detection (i.e. hazard detection and monitoring, water quality), while technological goals are optical Inter-Satellite Link (OISL) demonstration.
• The RTAFSAT-1 (Royal Thai Air Force Satellite-1) mission, also referred to as NAPA-1, is a 6U CubeSat, the first remote-sensing CubeSat mission for Thailand. The satellite will carry out an Earth Observation Demonstration mission with SCS Gecko Camera and Simera TriScape-100 payloads; the designed lifetime is 3 years.
• DIDO-3, a commercial 3U CubeSat mission of SpacePharma. The objective is to gather data by researching the effects of a microgravity environment on biological materials. SpacePharma from Israel will be on board SSMS POC with DIDO-3 Nanosatellite to perform biological experiments under Microgravity for several customers involved in the pharmaceutical business, supported by Italian Space Agency (ASI) and the Israeli Space Agency (ISA). Dido-3 will be monitored from the Ground Station developed by SpacePharma in Switzerland.
• SIMBA (Sun-Earth Imbalance), a 3U CubeSat mission led by the Royal Meteorological Institute Belgium, The objective is to measure the TSI (Total Solar Irradiance) and Earth Radiation Budget climate variables with a miniaturized radiometer instrument. This mission will help in the study of global warming. This science mission will have a design lifetime of 3 years and the satellite performances will be monitored from ground station located in The Netherlands.
• TARS-1, a 6U CubeSat of Kepler Communications, developed at ÅAC Clyde Space for IoT (Internet of Things) applications. TARS-1 features deployable solar arrays, software-defined radios (SDR), a narrowband communications payload and high-gain antennas.
• OSM-1 Cicero, the first nanosatellite developed in Monaco by OSM (Orbital Solutions Monaco engineers, a 6U CubeSat with a mass of ~10 kg) based on the Tyvak Nano-Satellite Systems design. OSM plans to build nanosatellites to gather environment and climate data.
• TTU100, a 1U CubeSat developed at the Tallinn University of Technology, Estonia. The objective is to test earth observation cameras and high-speed X-band communications. It will perform remote sensing in the visible and IR electromagnetic spectrum.
• UPMSat-2 (Universidad Politecnica de Madrid Satellite-2), a demonstration microsatellite (45 kg) of IRD-UPM.
Sensor Complement
VISION (Visible Spectral Imager for Occultation and Nightglow)
VISION, developed by VTT, targets primarily the observation of the Earth's atmospheric limb during orbital Sun occultation. By assessing the radiation absorption in the Chappuis band for different tangent altitudes, the vertical profile of the ozone is retrieved. A secondary objective is to measure the deformation of the solar disk so that stratospheric and mesospheric temperature profiles are retrieved by inversion of the refractive ray-tracing problem. Finally, occasional full-spectral observations of polar auroras are also foreseen. 14)
VISION is a hyperspectral imager in the visible and the near-infrared domain, between 430 and 800 nm. It is capable of taking 2D snapshots at freely selectable wavelengths within this range; the spectral selection is performed by a tunable FPI (Fabry-Perot Interferometer), the basic concept of which is shown in Figure 9 (Ref. 3).

The key parameters of the VISION instrument are:
- Spectral filters: up to 3 modes
- Detector: Commercial CMOS 2048 x 2048 RGB
- Field of View: 2.5°
- Spectral range: 400-800 nm, FWHM: < 10 nm
- Heritage: AaSI (Aalto-1 Spectral Imager) on board of Aalto-1 of Aalto University, Finland.
The science goals are:
• Polar and mid-latitude stratospheric ozone vertical profile retrieval (via spectral observation of Sun occultations in the Chappuis band)
• Upper atmosphere temperature profiling based on the Sun refractive flattening: “Atmospheric Refractivity from Inversion of Dilution.” The objective is to assess the refracted Sun shape in order to retrieve stratospheric and mesospheric temperature profiles by inverting the ray-tracing problem. Full spectral scan observations of nightglows and polar auroras are also foreseen if the dynamic range of the instrument allows it.
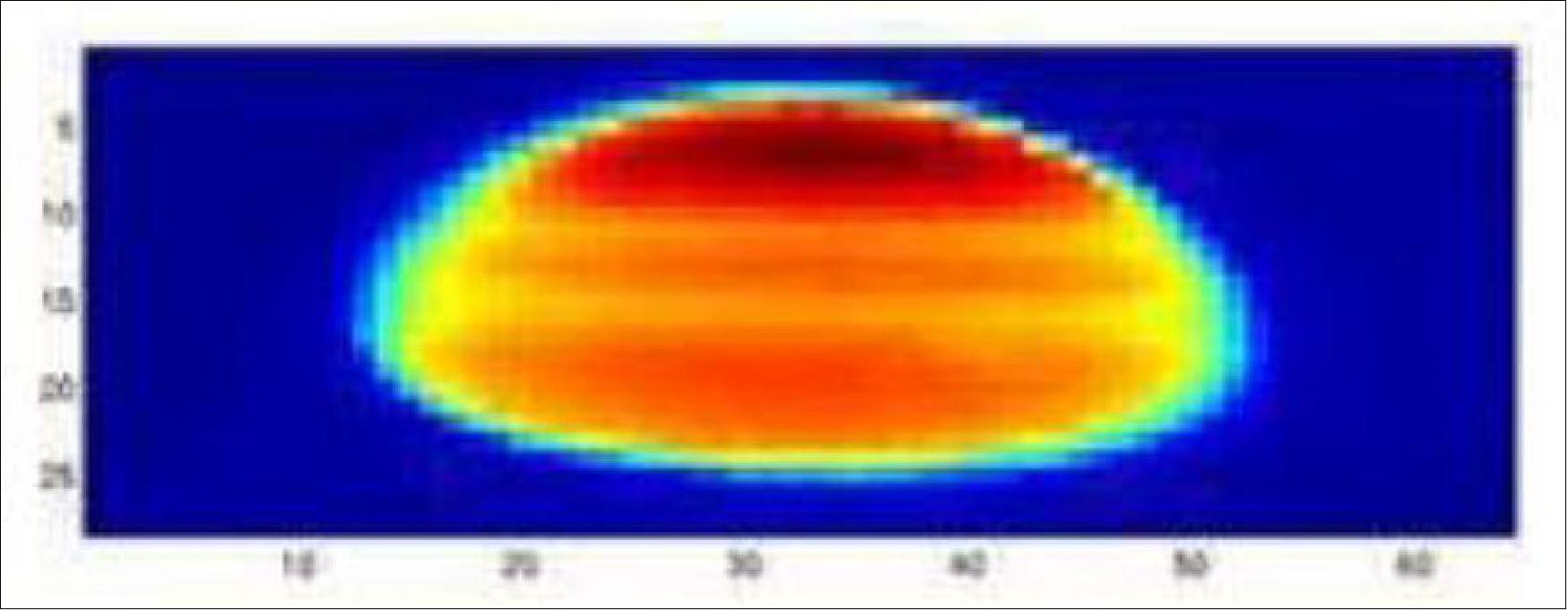
As shown in Figure 10, the apparent shape of the solar disk shrinks along the vertical dimension (relative to the Earth image). This deformation comes from the fact that rays emanating from the bottom of the Sun image propagate into denser atmospheric layers than those emanating from the top. By solving the inverse ray-tracing problem of the photons' propagation in the atmosphere, the mesospheric and stratospheric temperature profiles can be retrieved. Spectacular results have recently been obtained by the SOFIE instrument aboard the AIM (Aeronomy of Ice in the Mesosphere) spacecraft by detecting the edges of the solar disk and the related refraction angle. The VISION project expects to improve the method by making use of the full solar disk.
The miniaturized VISION instrument is the primary instrument of the PICASSO mission. The optimized VISION design is expected to result in stratospheric ozone measurements with 5% accuracy with a vertical resolution of 2 km after post-processing. Thus, VISION will be one of the first CubeSat optical payloads capable of providing real atmospheric science data.
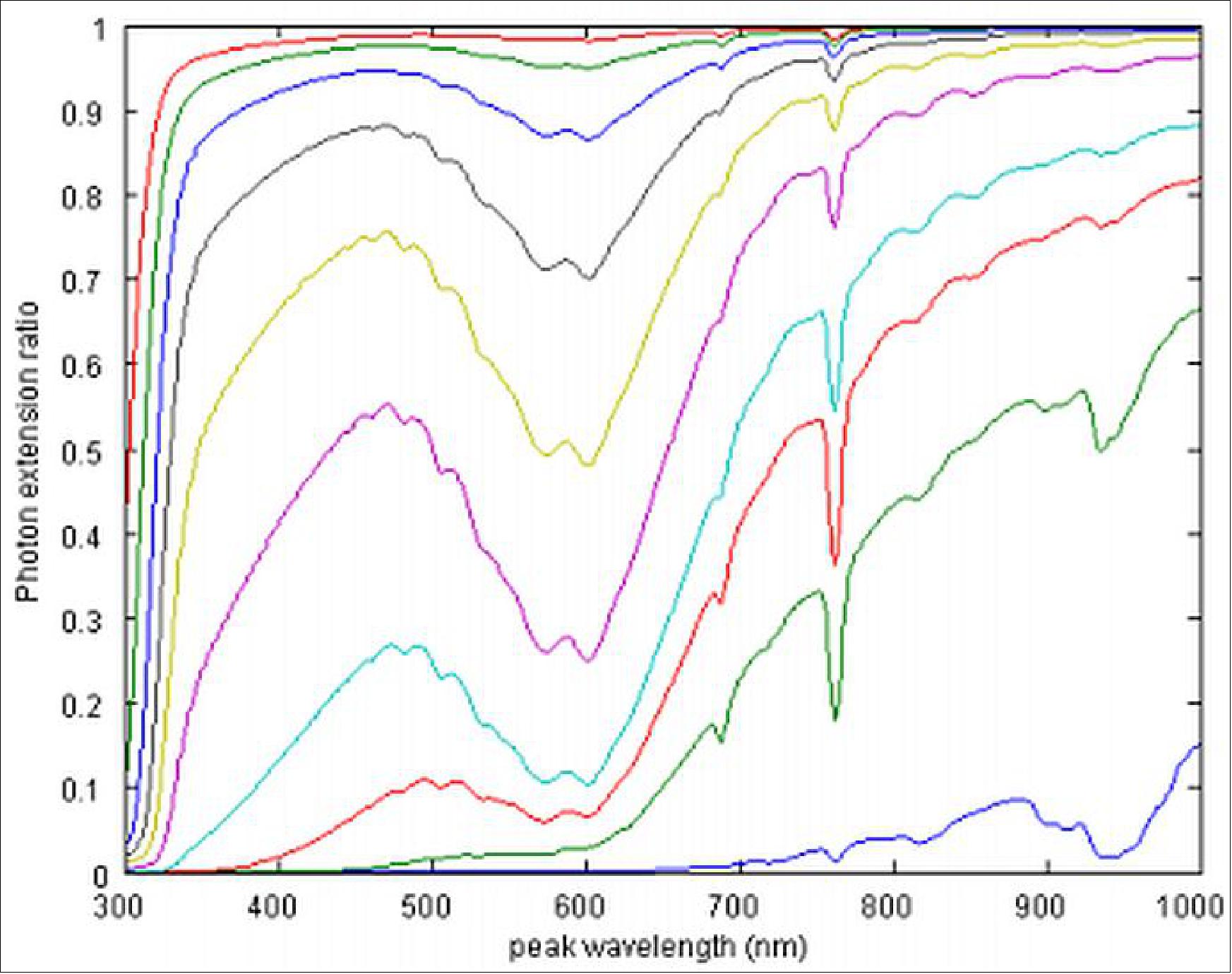
The solar brightness is attenuated by scattering, absorption and diffusion processes along the optical path in the atmosphere. By studying the attenuation spectrally, profiles of physical properties and chemical components in the atmosphere can be retrieved. Results from the numerical simulation of the attenuation of the photon number at different tangent heights are illustrated in Figure 5 – here, the upper curve corresponds to a 50 km altitude, decreasing in 5 km increments down to a 5 km altitude, which is represented by the lower curve. The photon depletion around 600 nm corresponds to photon absorption by the ozone in the so-called Chappuis band. Resolving it gives access to the ozone profile.
SLP (Sweeping Langmuir Probe)
The SLP instrument is designed and developed at BIRA to observe the electron density and temperature with the following scientific objectives: 15)
- Investigate the ionosphere-plasmasphere coupling
- Study of the aurora structures
- Survey of the polar cap arcs. Monitor density irregularities in the polar cap ionosphere and relate those to signatures of the polar cap arcs, (e.g. those found in Cluster data).
- Study of ionospheric dynamics.
Instrument:
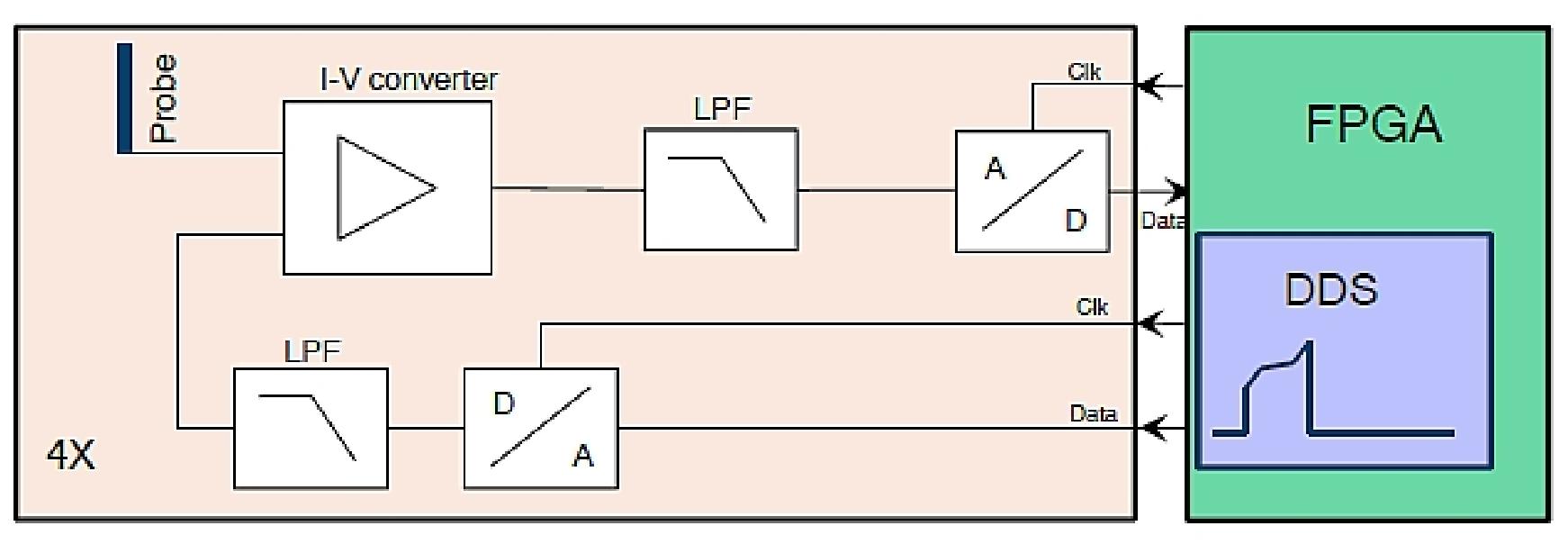
SLP includes four cylindrical probes (needle-like Langmuir probes) whose electrical potential is swept in such a way that both electron temperature and electron density can be derived. In addition, since at least two probes will be out of the spacecraft’s wake, differential measurements will be performed in order to increase the accuracy. The probes will be mounted on 5 cm long booms, at the extremity of 20 cm long solar panels deployed perpendicularly to the body of the spacecraft.
To avoid spacecraft charging, which leads to erroneous measurement data, the probes will be swept with a duty cycle of less than 5%. In addition, to avoid probe surface contamination and ageing, a high voltage will be applied to the probes when necessary. The raw data will be processed on board, using a dedicated FPGA. Only the compressed parameters of interest will be sent back to the ground station via an S-band link.
Given the high inclination of the orbit, the SLP instrument will allow global monitoring of the ionosphere. Therefore, PICASSO will enable the study of space weather phenomena such as ionosphere-plasmasphere coupling, the subauroral ionosphere and corresponding magnetospheric features, auroral structure, polar cap arcs, ionospheric dynamics via coordinated observations with EISCAT’s heating radar, and turbulence in the partially ionized ionosphere.
Parameter | Minimum | Maximum |
Electron density | 109/m3 | 1012/m3 |
Electron temperature | 1300 K | 2700 K |
Measured current | 50 x 10-12 A | 8 x 10-6 A |
Spatial sampling | N/A | 160 m |
Sampling frequency | 50 Hz | N/A |
Instrument mass | N/A | 150 g |
Power consumption | N/A | 1.5 W |
PCB (Printed Circuit Board) size | N/A | 95 mm x 95 mm |
Probe length (boom inclusive) | N/A | 100 mm |
Probe diameter | N/A | 2 mm |
No of probes | 4 | |
Deployment system | Solar panels | |
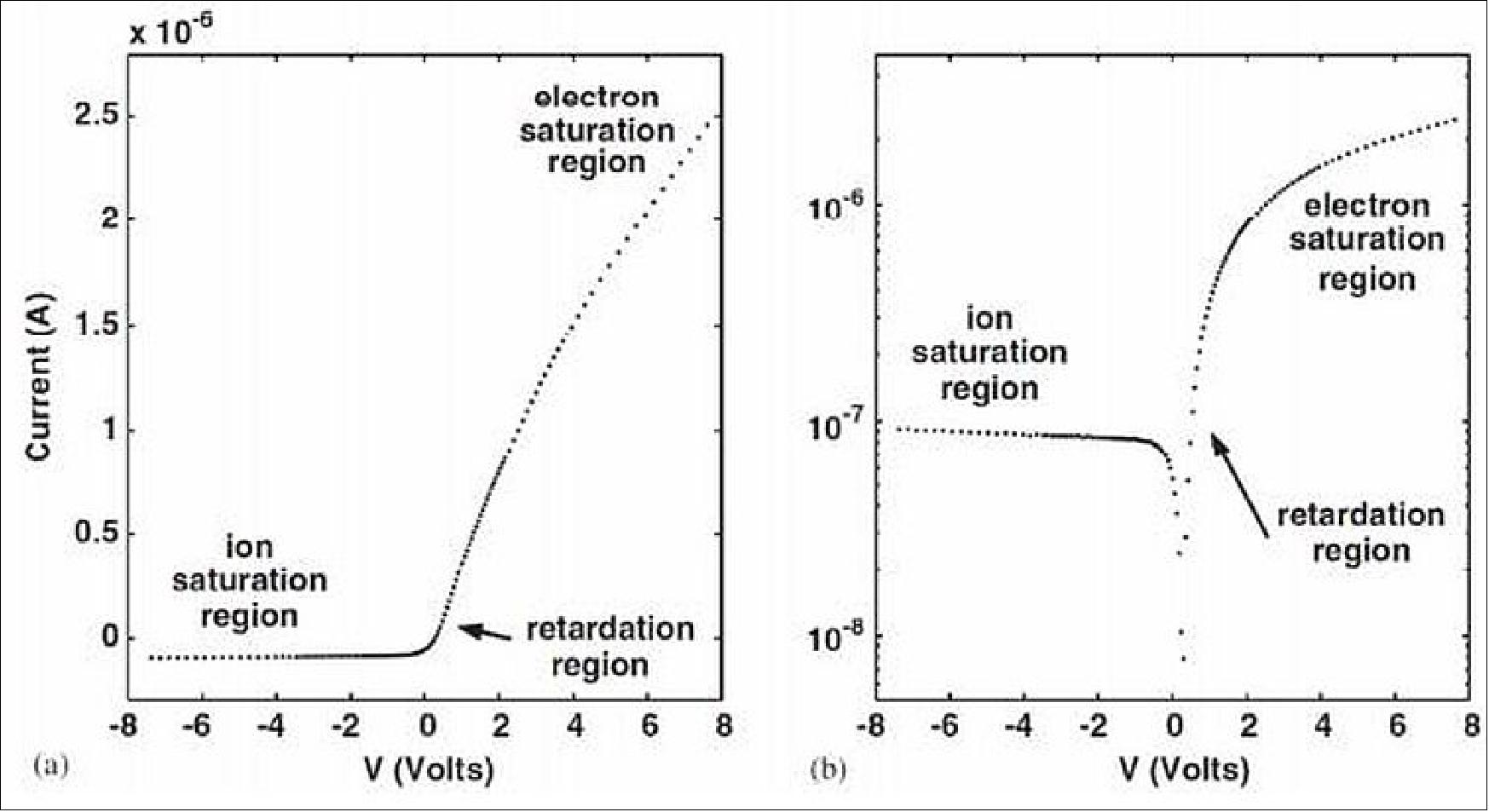
The SLP instrument provides in-situ observations. The principle of SLP’s measurement is based on the conventional Langmuir probe theory. By sweeping the potential of the probes with respect to the plasma potential, the instrument measures the current in the three regions: ion saturation, retardation and electron saturation regions. The typical characteristics of such a probe are illustrated in Figure 6 (Ref. 3).
The ion density is derived from the ion saturation region, where the potential of the probes is sufficiently negative to repel electrons and attract only true ions. The electron temperature and S/C potential are retrieved from the retardation region, where the potential of the probes is close to that of the plasma so that both ions and electrons are attracted. The electron density is derived from the electron saturation region, where the potential of the probes is sufficiently positive to repel ions and attract only electrons.
In nominal mode, SLP sweeps the potential of the probes from -7 V to +7 V with respect to the plasma potential in order to retrieve the electron density and temperature, together with the spacecraft potential and the ion density (when it is large enough). In another mode, the instrument measures only in the electron saturation region at a higher rate, measuring electron density with better spatial resolution. This operating principle is more advanced than the idea of using 4 probes at four different fixed bias potentials in the electron saturation region since it allows more detailed analysis and permits the determination of electron temperature as well. In addition, with this operating principle, there is no need for an electron gun.
The probes are thin cylindrical titanium rods, mounted on deployable solar panels, which act as deployable booms. This configuration ensures that at least one probe is out of the S/C’s wake at any time, in addition to providing redundancy.
Ground Segment
Clyde Space is constructing a Ground Station (GS) at its new headquarters in the centre of Glasgow, Scotland, which will be used for PICASSO mission operations. The ground station will be composed of a pair of UHF and VHF Yagi-Uda type antennas capable of both uplink and downlink as well as a 3 m mesh dish for S-band downlink operations. The ground station will be capable of tracking satellites using orbit prediction from TLEs, and will be set up for fully autonomous up/downlink operations to maximize the use of passes.
References
1) D. Fussen, J. De Keyser, M. De Mazière, D. Pieroux, H. Lamy, S. Ranvier, E. Dekemper, A. Merlaud, E. Neefs, O. Karatekin, Z. Ping Z, V. Dehant, M. Van Ruymbeke, J. P. Noël, “The Picasso Mission,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
2) P. Cordoen, J. De Keyser, Ph. Demoulin, D. Fussen, D. Pieroux, S. Ranvier, “PICASSO - Pico-Satellite for Atmospheric and Space Science Observations,” 6th European CubeSat Symposium, Estavayer-le-Lac, Switzerland, October 14-16, 2014
3) Bena Mero, Kevin A. Quillien, Malcolm McRobb, Simone Chesi, Ross Marshall, Alasdair Gow, Craig Clark, M. Anciaux, P. Cardoen, J. De Keyser, Ph. Demoulin, D. Fussen, D. Pieroux, S. Ranvier, “PICASSO: A State of the Art CubeSat,” Proceedings of the 29th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 8-13, 2015, paper: SSC15-III-2, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3179&context=smallsat
4) “Picasso CubeSat,” ESA, January 28, 2015, URL: http://www.esa.int/spaceinimages/Images/2015/01/Picasso_CubeSat2
5) D. Fussen, M. Anciaux, S. Bonnewijn, P. Cardoen, E. Dekemper, J. De Keyser, Ph. Demoulin, D. Pieroux, S. Ranvier, F. Vanhellemont, ”PICASSO - PICo-sattellite for Atmosphericand Space Science Observations,” PICASSO, Oct. 9, 2015, URL: http://be-space.eu/wp-content/uploads/2015/11/PICASSO_Fussen.pdf
6) Didier Fussen, Emmanuel Dekemper, Philippe Demoulin, Didier Pieroux, Filip Vanhellemont, Sylvain Ranvier, Michel Anciaux, Sabrina Bonnewijn, Pepijn Cardoen, Emmanuel Gamby, Johan De Keyser, Ross Marshall, Bena Mero, Kevin Quillien, Hessel Gorter, Heikki Saari, Antti Näsilä, Christer Holmlund, Rami Mannila, Ismo Näkki, Harri Ojanen, Laurence Rossi, Lionel Jacques, Jean-Hervé Lecat, Roger Walker, ”PICASSO: atmospheric remote sensing and in situ space science from CubeSats,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, URL: http://arc.aiaa.org/doi/book/10.2514/MSPOPS16
7) ”COVID-19: Guiana Space Center suspends launch campaigns,” Arianespace, 16 March 2020, URL: https://www.arianespace.com/press-release/covid-19-guiana-space-center-suspends-launch-campaigns/
8) PICASSO picosatellite ready for launch,” BIRA, 13 February 2020, URL: https://www.aeronomie.be/en/news/2020/picasso-picosatellite-ready-launch
9) ”AAC Clyde Space delivers PICASSO, the Golden CubeSat,” AAC Clyde Space, 5 February 2020, URL: https://www.aac-clyde.space/latest/46-aac-clyde-space-delivers-picasso-the-golden-cubesat
10) ”Vega return to flight proves new rideshare service,” ESA Enabling & Support, 3 September 2020, URL: https://www.esa.int/Enabling_Support/Space_Transportation
/Vega/Vega_return_to_flight_proves_new_rideshare_service
11) ”With Vega, Arianespace successfully performs the first European mission to launch multiple small satellites,” Arianespace Press Release, 3 September 2020, URL: https://www.arianespace.com
/press-release/with-vega-arianespace-successfully-performs-the-
first-european-mission-to-launch-multiple-small-satellites/
12) ”Vega flight VV16,” Wikipedia, URL: https://en.wikipedia.org/wiki/Vega_flight_VV16
13) Mike Safyan, ”Planet’s First Launch of 2020: 26 SuperDoves on a Vega,” Planet, 13 February 2020, URL: https://www.planet.com/pulse/planets-first-launch-of-2020-26-superdoves-on-a-vega/
14) “VTT develops a miniaturized spectral camera for ESA’s Picasso nanosatellite mission,” VTT, 2015, URL: http://www.vttresearch.com/services/smart-industry/process-and-analytical-measurement
/vtt-develops-a-miniaturized-spectral-camera-for-esa%E2%80%99s-picasso-nanosatellite-mission
15) S. Ranvier, P. Cardoen, J. De Keyser, D. Pieroux, “A Novel Langmuir Probe Instrument for CubeSats,” 5th European CubeSat Symposium, Royal Military Academy, VKI (Von Karman Institute), Brussels, Belgium, June 3-5, 2013
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Sensor Complement Ground Segment References Back to top