EO
High resolution optical imagers
Land
Multi-purpose imagery (land)
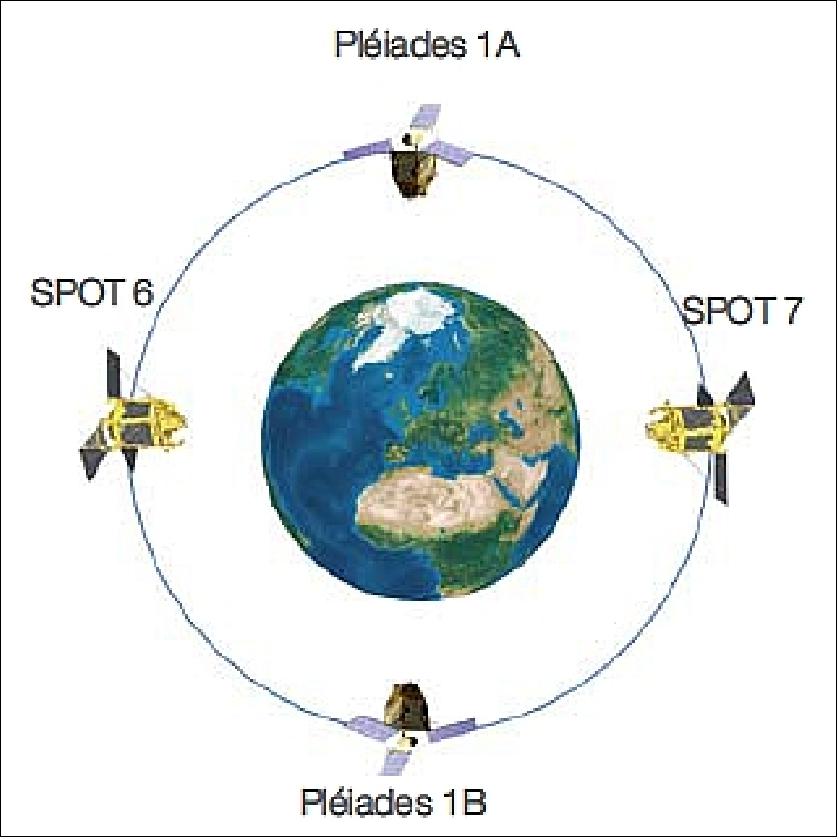
Pleiades is a two satellite constellation of CNES, the space agency of France, consisting of identical twin satellites, Pleiades-1A and Pleiades-1B.
Quick facts
Overview
| Mission type | EO |
| Agency | CNES |
| Mission status | Operational (extended) |
| Launch date | 17 Dec 2011 |
| Measurement domain | Land, Snow & Ice |
| Measurement category | Multi-purpose imagery (land), Vegetation, Landscape topography, Ice sheet topography |
| Measurement detailed | Land surface imagery, Land cover, Land surface topography, Sea-ice sheet topography |
| Instruments | HiRI |
| Instrument type | High resolution optical imagers |

Summary
Mission Capabilities
Pleiades is the successor of the SPOT program, with a focus on cost reduction, technological innovation, user services and performance upgrades. In cooperation with the on-going COSMO-SkyMed program as part of ORFEO, the constellation provides global coverage and daily observation accessibility to any point on Earth in several modes of operation.
Pleiades satellites are each fitted with a CNES high-resolution imager (HiRI) developed by Thales Alenia Space (TAS-F). The instrument's prime objective is to provide high-resolution multispectral imagery with high geo-location accuracy. It offers several types of acquisition modes to fulfil various application fields of cartography, agriculture, forestry, hydrology, geological prospecting, dynamic geology, risk management and defence.
Performance Specifications
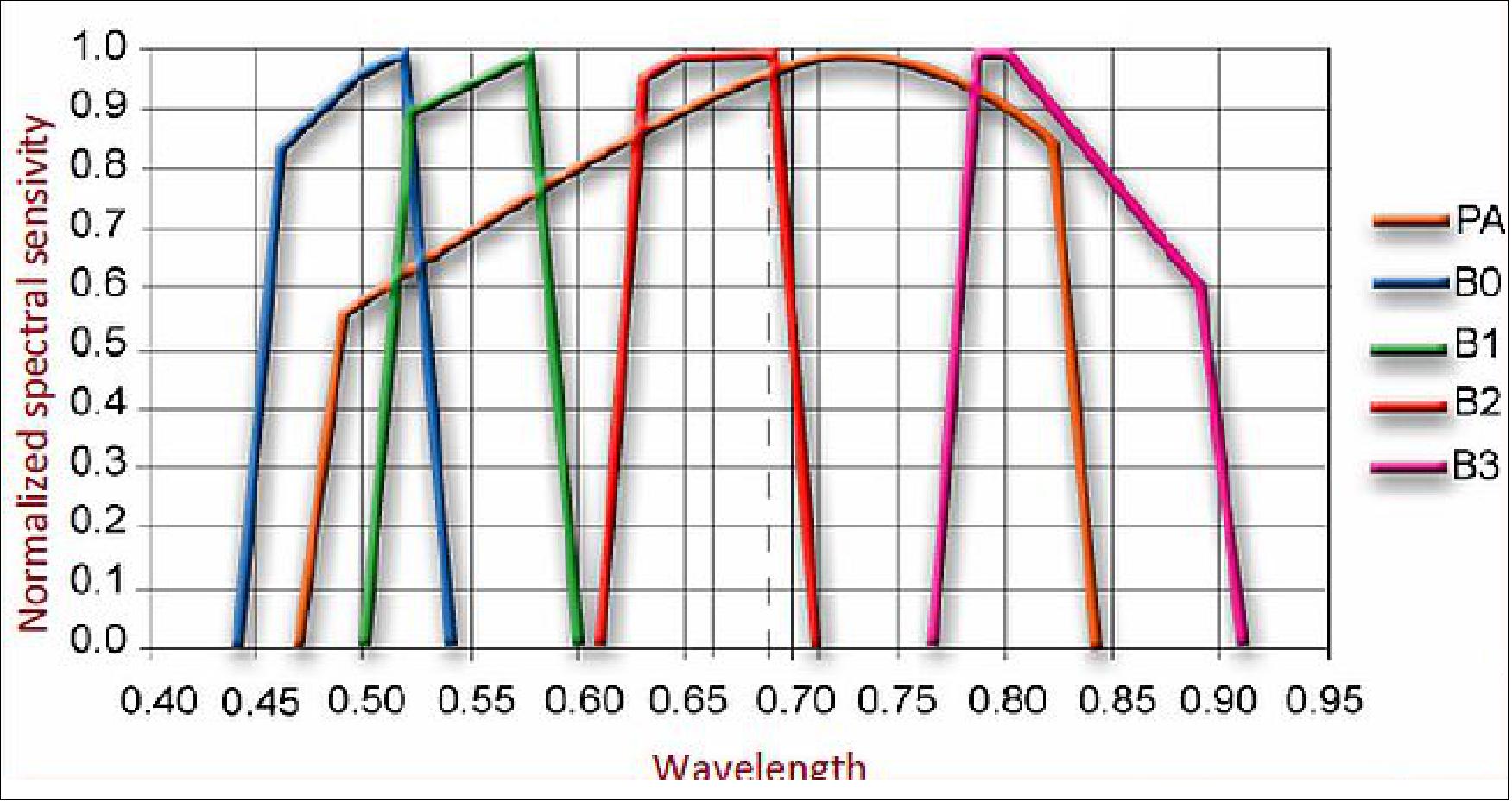
HiRI captures images in one Panchromatic (PAN) and four multispectral bands: blue, green, red and near-infrared. The PAN band has a spatial resolution of 0.7 m whilst the multispectral bands have a spatial resolution of 2.8 m. The swath width for each is 20 km at nadir.
HiRI is capable of imaging in several acquisition modes to simultaneously meet the objectives of both the military and civil communities. The one-pass acquisition mode is able to locally enlarge the swath by simultaneously acquiring several adjacent swaths within the Field of Regard (FOR) of 60°. It is able to acquire imagery with an area of approximately 120 km x 110 km. The simultaneous stereoscopic or tri-stereoscopic mode employs a variation of the one-pass mode using two or three different view angles. The multi-spot mode acquires many spot targets around the ground track to acquire the maximum number of scenes on a given surface in one day.
The twin satellites undergo sun-synchronous phased orbits (180° phasing) at an altitude of 694 km with an inclination of 98.2°. The nominal repeat cycle is 26 days and the two agile spacecraft have the potential to revisit any point on Earth within one day.
Space and Hardware Components
Pleiades-1A and Pleiades-1B use a variation of the AstroSat-1000 platform bus by EADS (European Aeronautic Defence and Space) Astrium SAS (Statistical Analysis System).
To enhance the agility of the spacecraft, the HiRI instrument is integrated inside the hexagonal bus. It features three high-efficiency triple-junction solar cell arrays at the top of the platform and three star trackers in a quasi tetrahedron configuration to optimise the attitude determination accuracy. An autonomous orbit determination is performed by a DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite) receiver which uses measurements between the satellite and dedicated ground stations at two frequencies to reach an accuracy of approximately 1 m. Attitude determination is performed by a gyro-stellar system and four CMG’s (Control Moment Gyro) are used to meet the requirements of rapid slewing manoeuvres. Each satellite has a mass of 940 kg with 75 kg of hydrazine fuel.
Pleiades-HR (High-Resolution Optical Imaging Constellation of CNES)
Pleiades-HR is a two-spacecraft constellation of CNES (Space Agency of France), representing a long-term engagement with the introduction of advanced technologies in Earth observation capabilities. Starting with the first launch itabn 2009, the Pleiades program will follow the SPOT program satellite series services, with the following overall objectives:
• Provision of an optical high-resolution panchromatic (0.7 m) and multispectral (2.8 m) imagery with high quality product standards in terms of resolution, MTF (0.2 at system level), and a high image location accuracy
• Global coverage and a daily observation accessibility to any point on Earth
• Service provision of so-called “level-2 products” to customers consisting of a panchromatic image with a merged multispectral image orthorectified on a DTM (Digital Terrain Matrix)
• Provision of stereo imagery (up to 350 km x 20 km or 150 km x 40 km) and mosaic imagery of size up to 120 km x 120 km
• More than 250 images/day are expected from each spacecraft of the constellation
• The constellation is required to support risk management support services in terms of observation coverage (this requires an agile S/C design, a responsive operational concept, and a sufficient ground segment). 1) 2) 3) 4) 5) 6) 7)
Note: The name Pleiades refers to an open cluster of stars (about 35 light years in diameter) in the zodiacal constellation Taurus, about 400 light years from our solar system. It contains a large amount of bright nebulous material and several hundred stars, of which six or seven can be seen by the unaided eye and have figured prominently in the myths and literature of many cultures.
In Greek mythology the Seven Sisters (Alcyone, Maia, Electra, Merope, Taygete, Celaeno, and Sterope, names now assigned to individual stars), daughters of Atlas and Pleione, were changed into the stars. The heliacal (near dawn) rising of the Pleiades in spring of the Northern Hemisphere has marked from ancient times the opening of seafaring and farming seasons, as the morning setting of the group in autumn signified the seasons' ends. Some South American Indians use the same word for ”Pleiades” and ”year.” The cluster was first examined telescopically by Galilei Galileo, who found more than 40 members.
Background
Since 1997 CNES is studying the use of smaller satellites (a medium spacecraft size of about 1000 kg instead of 3 tons as for the SPOT-5 S/C), resulting in the “3S” platform concept (Small Satellite System) standing for “Suite de Systeme SPOT” or for “SPOT Successor System.” The focus is on cost reduction, technological innovation, user services, and performance upgrades for a new generation of optical imaging satellites, referred to as Pleiades. 8) 9)
In the same timeframe, the Italian Space Agency (ASI) performed also studies of a new program under the name of COSMO-SkyMed. Both countries had the same objectives in building a dual system, serving the civilian user community (institutional and commercial) and the defense users in each country. Recognizing the very similar goals of both programs, the two nations decided to cooperate to avoid duplications of civil and defense systems in Europe.
On Jan. 29, 2001, an intergovernmental agreement (memorandum of understanding) was signed during the Turin meeting between the heads of government of Italy (Guiliano Amato) and France (Lionel Jospin). The objective of this bilateral agreement, referred to as ORFEO (Optical and Radar Federated Earth Observation), is the cooperation of France and Italy on a “dual high-resolution Earth observation system,” comprising a two-satellite constellation in the optical region under the leadership of France, and a four-satellite constellation under Italian leadership in the microwave region of the spectrum (initially X-band SAR).
The intent of this agreement is to provide a long-term perspective on a number of high-quality data products and services on the commercial market for a wide range of applications in the fields of cartography, agriculture, forestry, hydrology, and geological prospecting. The dual service concept is seen in the data requirements of the defense and civilian communities with an option of a daily revisit capability. The agreement calls for funding and development of the space segment by each country and a common sharing of the ground segment. 10) 11)
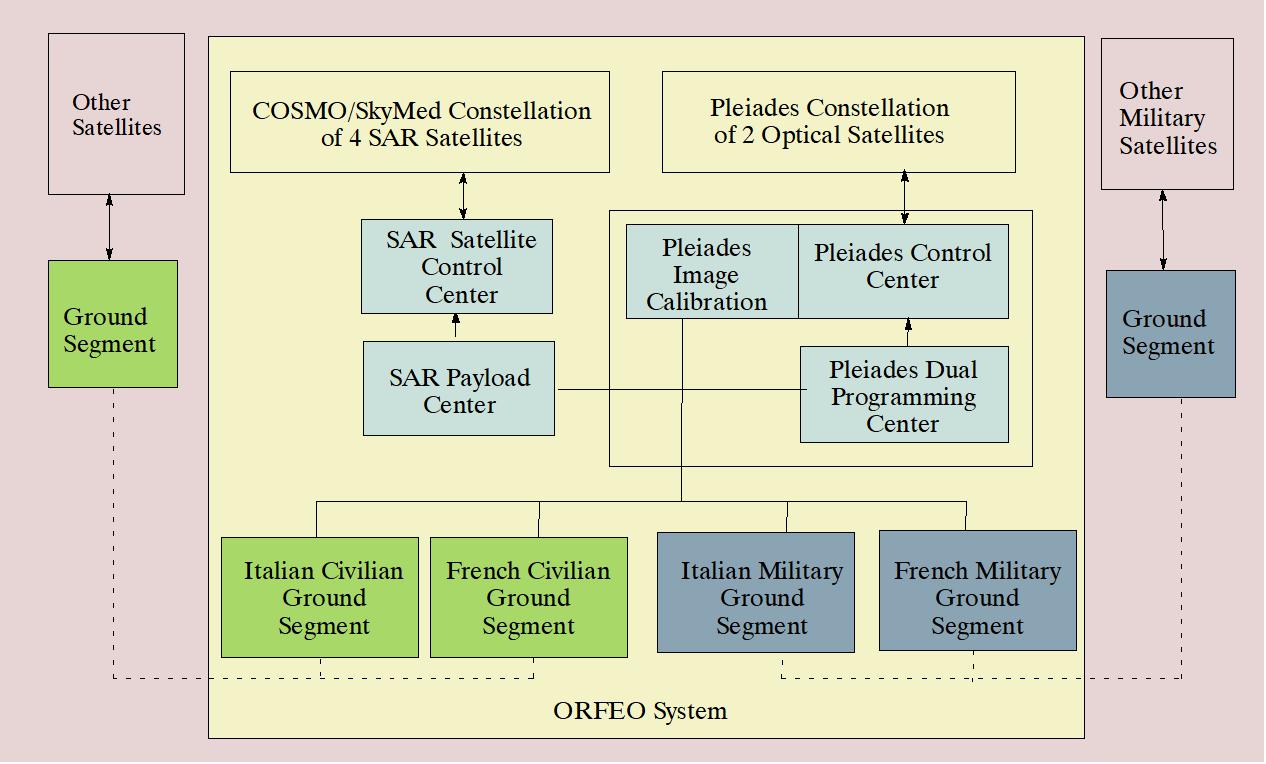
In this framework, the Italian and French Governments started a cooperation with the goal of Earth observation for dual-use applications (military and civil) with SAR and optical instruments based on the on-going COSMO-SkyMed and Pléiades small satellite programs, respectively. This dual-use scenario calls for missions that offer advanced observation capabilities in several modes of operation, permitting to meet the objectives of the military and civil communities at the same time.
The development of innovative and complementary instrumentation in the radar field (e.g., multi-mode and flexible-support SAR's offering high-resolution data) and in the optical field (e. g., hyperspectral sensor with capabilities of variable spatial resolutions as well as high detection sensitivities in the visible and infrared spectral regions) are major objectives of the programs.
The earlier memorandum of understanding was followed by a Memorandum of Agreement (MoA), for the ORFEO system definition step, between the French space agency (CNES) and the Italian space agency (ASI). The MoA was signed on June 22, 2002 at the Paris Air Show.
In 2005, CNES signed also Pleiades cooperation agreements with SNSB (Swedish National Space Board) with INTA (Instituto Nacional de Técnica Aeroespacial) of Spain, with ASA (Austrian Space Agency) of Austria, and with BELSPO (Belgian Science Policy Office) of Belgium. Belgium and France are already partners in the long-term SPOT program. Pleiades is with this action a multi-mission concept and a partnership program.
Thematic commissioning phase: 12)
The thematic part of the ORFEO accompaniment program covers a large range of applications, and aims at specifying and validating products and services required by users. An in-depth work of user needs assessments in eight domains (sea and coastline, risks and humanitarian aid, cartography and urban planning, geophysical hazards, hydrology, forestry, agriculture and defense) has given rise to a large number of feasibility studies from 2006 to 2011. Since 2006, more than 40 studies have been led by scientists and thematic experts from French and Belgium institutions, in close link with public end-users such as Ministry of Internal Affairs, Ministry of Ecology, French national cartographic institute, etc. Such studies, generally based on student internship, have been performed with imagery support provided by CNES both in the optical domain (WorldView-2, Formosat-2, QuickBird, Ikonos, GeoEye-1, Kompsat, aerial images) and in the radar domain (TerraSAR-X, COSMO-SkyMed, aerial images).
The third and last phase of the ORFEO program, the PUTC (Pleiades Users Thematic Commissioning) phase, started in March 2012. This phase is a direct follow-up of ORFEO program objectives and philosophy, aiming at supporting and encouraging institutional use of Pleiades, performing research, R&D and demonstration projects required by institutional actors.
Free open source image handling and processing tools set up in the ORFEO methodological part will be provided, if needed, for easier access to data. Such activities are performed in complementary and in synergy with Astrium GEO-Information Services marketing activities, aiming at developing a Pleiades market among commercial users and at setting up certified and qualified commercial services.
The most promising studies since 2006 are being assessed with Pleiades imagery, in the eight domains of interest. Several key issues such as response to crisis, urban planning, human pressure on coastlines, watershed cartography, forest management are thoroughly studied. The parameters taken into account for the selection of the thematic studies were:
• Projects ready for operational applications (e.g. monitoring large gathering/summits, updating databases...)
• Projects still in demonstration but very mature (e.g. coastline detection and characterization, scrublands detection for fire prevention...)
• Projects of interest for institutional actors whatever their technical maturity is: research, Research & Development,demonstration (e.g. Green and Blue corridors, biodiversity, roof reconstruction...)
• Projects for operational demonstration capacity acquisition (e.g. IGN studies: department global coverage, MNT-Lidar assessment...).
Major disasters and emergency events are covered with Pleiades imagery for Civil Protection needs. Since the beginning of 2013, Pleiades is fully operational in the International Charter “space and major disasters” process . The PUTC philosophy remains in the association of institutional users in the related projects. Indeed, studies in close interaction with public sector which answer to the requirements of the Ministry of Ecology specified in the Plan d’Applications Satellitaires, but also to other Ministries Requirements (Internal Affairs, Agriculture).
The importance of a collaborative work between the different thematic working groups has been privileged in order to maximize the efficiency for the key thematic studies (i.e Green and Blue Corridors) and to gather the data acquisition over multi-thematic sites. About 70 geographical sites related to almost 130 thematic studies have been selected in the framework of PUTC. More than 500 Pleiades acquisitions have been requested by users.
From its start in March 2012, the PUTC allowed the acquisition of more than 150 Pleiades images with a total surface of 40,000 km2. About 150,000 km2 are planned to be imaged by Pleiades for PUTC until the end of 2013. A total of 69 geographic sites around the world have been selected; their sizes vary from 100 km2 up to 3500 km2.
In the framework of the PUTC, more than 60 scientists or institutional teams are provided with the Pleiades images. Most of them are French but there are also some Belgian partners. As images are bought under DSP licence, institutional partners from France, Belgium, Spain, Sweden and Austria can access those images for free, thanks to their affiliation to ORFEO program.
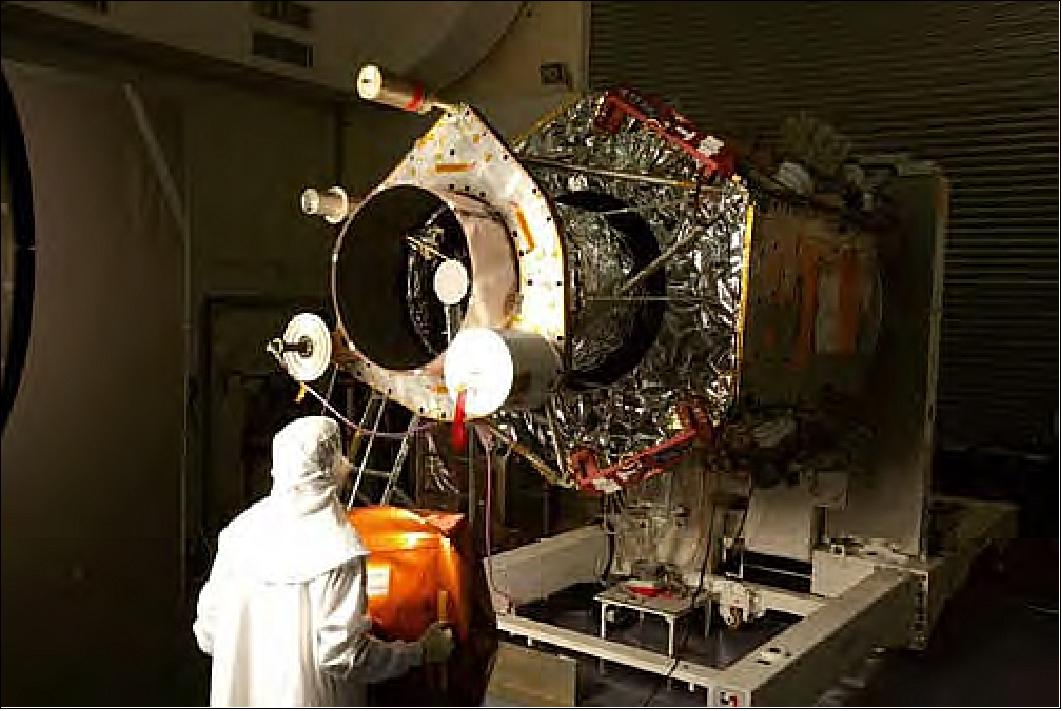
Spacecraft
The design of the Pleiades spacecraft employs a variation of the AstroSat platform, namely AstroSat-1000 of EADS Astrium SAS. The main design drivers for the S/C architecture were “satellite pointing agility and image location accuracy.” Agility requires a very compact S/C design; hence, the imaging instrument is integrated inside the bus. A high degree of image location accuracy is achieved by minimizing the interface between the imager and the bus. The bus structure is of hexagonal shape, with three solar arrays positioned at 120º at the top of the platform (fixed mounting of solar arrays), and three star trackers in a quasi tetrahedron configuration, optimizing the attitude determination accuracy. The solar array size is minimized by using high-efficiency triple-junction cells. The satellite electrical architecture is organized around a central computer, based on a SPARC ERC 32 computer, communicating via MIL-STD-1553B buses to the onboard equipment. The computing, monitoring and reconfiguration functions are centralized in the OBMU (On Board Management Unit). The IMU (Instrument Management Unit) gathers the instrument interfaces: instrument thermal control hardware, mechanisms command, detection unit power conversion. All the other instruments have their own 1553 interface and directly interface with the OBMU. Two 1553 buses are nominally used: the first one for cyclic tasks, mainly allocated to AOCS and thermal control, the second one dedicated to burst exchanges, mainly payload instruments.


The S/C is three-axis stabilized; attitude is sensed by star trackers, SED36 of EADS Sodern, (capable of finding attitude starting from a “lost-in-space” condition) and by fiber-optic gyrometers (FOG)- the FOG device, a product of IXSPACE, is also referred to as AstrixTM. The S/C permits a body-pointing capability with roll and pitch maneuvers, each up to 60º, within a period of 25 s. The solar array design (each panel size of 2.3 m x 1.0 m) introduces LPS (Lightweight Panel Structure) and triple-junction GaAs solar cells (RWE-3G with integral diode, 27% efficiency); these new developments were supported by ESA/ESTEC. The spacecraft solar panels (GaAs cells of 5 m2) provides a power of 1.5 kW EOL of 33.6 V at summer solstice (mean power of 850 W). The Lithium-ion batteries have a capacity of 150 Ah.
To ensure a balanced power budget over one day, the satellite points its arrays towards the sun before and after every imaging sequence. The S/C propulsion module employs hydrazine (50 l) and four 15 Nms thrusters for orbit control phases. The total dry mass of the S/C is 940 kg (compatible with Rockot, PSLV, and Soyuz launchers) + 75 kg of hydrazine. Hence, the mass of the new generation Pleiades spacecraft is only 1/3 that of its predecessor SPOT-5 with a mass of 3000 kg. 13) 14)
Attitude and orbit determination:
An autonomous orbit determination is performed by a DORIS receiver. DORIS is the CNES tracking system, based on measurements between the satellite and dedicated ground stations at two frequencies (400 MHz and 2 GHz). The receiver raw measurements are filtered inside the receiver by a high order navigator, based mainly on Earth gravity potential modeling, to reach an accuracy of about 1m. The receiver can be cold started in any satellite orientation in less than 1 orbit, which eases the satellite operations. It also provides the onboard time and the PPS (Pulse Per Second) count needed to synchronize the system.
Attitude determination is performed by a gyro-stellar system. Three high-accuracy star trackers (STR) are used for attitude sensing, with separate optical heads. STR measures the direction of 12 stars to estimate a 3 axis attitude at a frequency of 8Hz. Each star tracker operates autonomously, its pointing accuracy is better than 2 arcsec in FOV error, and 10 arcsec (max) in noise which translates to 200 m on the ground. Only the axes perpendicular to the boresight axis are used to improve the accuracy. The ground location accuracy of the imagery is 10 m for a 90% probability ground circular error without GCP (Ground Control Points). Solid state FOG (Fiber Optic Gyrometers), Astrix 200 of EADS Astrium-Xspace, are used to ensure high-accuracy attitude determination while maneuvering. 15)
Actuator system:
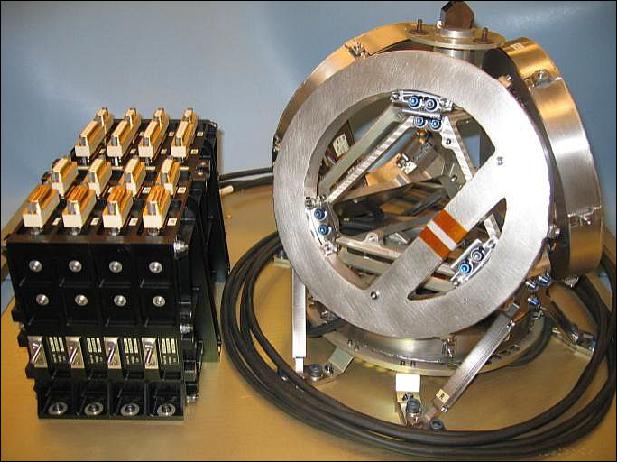
A newly developed CMG (Control Moment Gyro) technology is being introduced to perform the very demanding requirements of rapid slewing spacecraft maneuvers (i.e. body pointing of the S/C within ±60º). A cluster of four CMG actuators is being used, positioned in a pyramid configuration. The patented actuator system, developed by EADS Astrium-Teldix, is referred to as CMG 15-45S (15 Nms, 45 Nm, standard): it delivers a torque up to 45 Nm with a wheel of 15 Nms (angular momentum), sufficient to point a satellite in the 1000 kg class at more than 3º/s of slew rate within < 2 s; the compact architecture can be used for satellites from 1000 kg down to mini- and microsatellites. For Pleiades program applications, the requirements call for CMG fatigue failure modes in excess of 1.8 x 106 cycles under an average output torque of 19 Nm. 16) 17) 18) 19) 20)
Output torque | 45 Nm |
Angular momentum | 15 Nms |
Data bus interface | MIL-STD-1553 (or RS-422) |
CMG mechanism mass; volume | 15.7 kg; diameter = 270 mm, height = 350 mm |
CMG mechanism footprint | 200 mm diameter |
Electronics mass (1 box for 4 CMGs); volume | 2.7 kg per channel; 310 mm x 300 mm x 150 mm |
Power use per CMG (including electronics) | 25 W at max speed (@15 Nms) |
Input bus voltage range | 22-37 V |
Stiffness | 120 Hz |


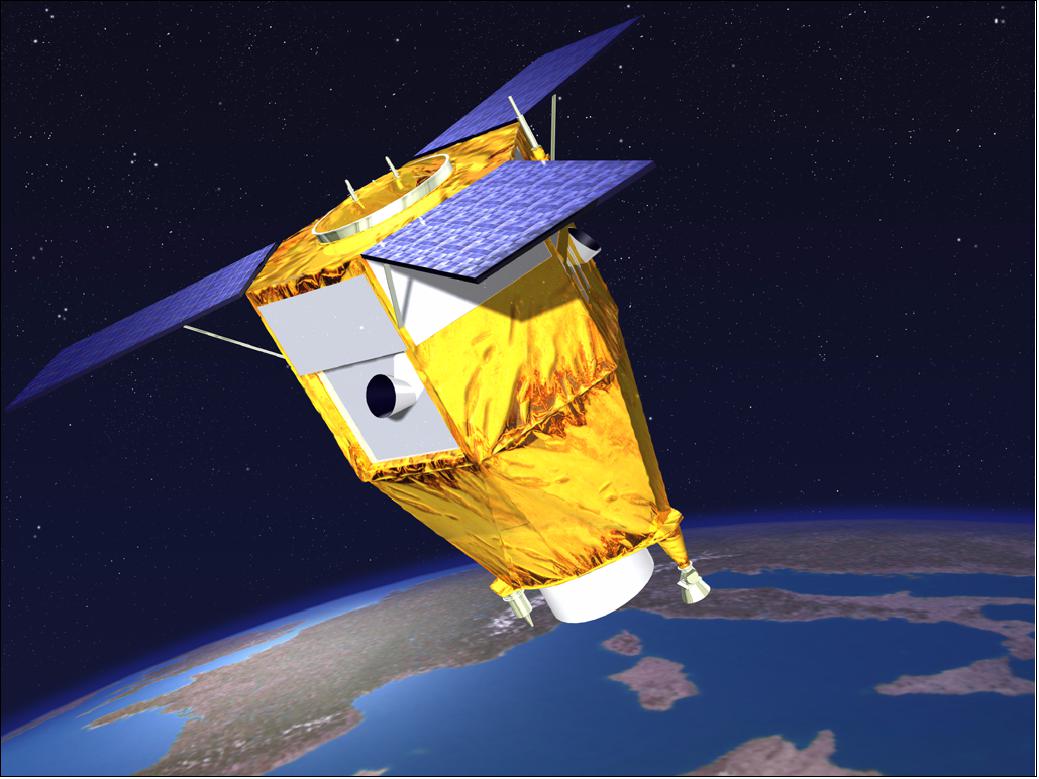
Legend to Figure 8: The payloads of the Soyuz launch vehicle include the Pleiades 1A satellite, pictured at top, and four ELISA satellites, two of which are seen at bottom. Chile's SSOT satellite is not visible because it is inside the adapter's central cylinder.
New ASAP-S Dispenser Structure developed for Soyuz
Arianespace enhanced the Soyuz mission flexibility with its development of a structure to accommodate small secondary payloads. Called the ASAP-S (Arianespace Structure for Auxiliary Payloads-Soyuz) this system continues the ASAP (Arianespace Structure for Auxiliary Payloads) concept previously developed for missions with members of the Ariane family, which have enabled “piggyback” passengers to be flown for the past 20-plus years. With the availability of ASAP-S on Soyuz, the ASAP launch capability on Ariane vehicles has been retired. 21)
The ASAP-S system for Soyuz has external positions for four microsatellites, along with volume inside the center structure for a fifth payload. The ASAP-S external configuration accommodates spacecraft weighing up to 200 kg, while the internal position is designed to accept a payload with a maximum mass of 400 kg.
The launch of the Pleiades-1A spacecraft was the first launch with the new ASAP-S dispenser structure.
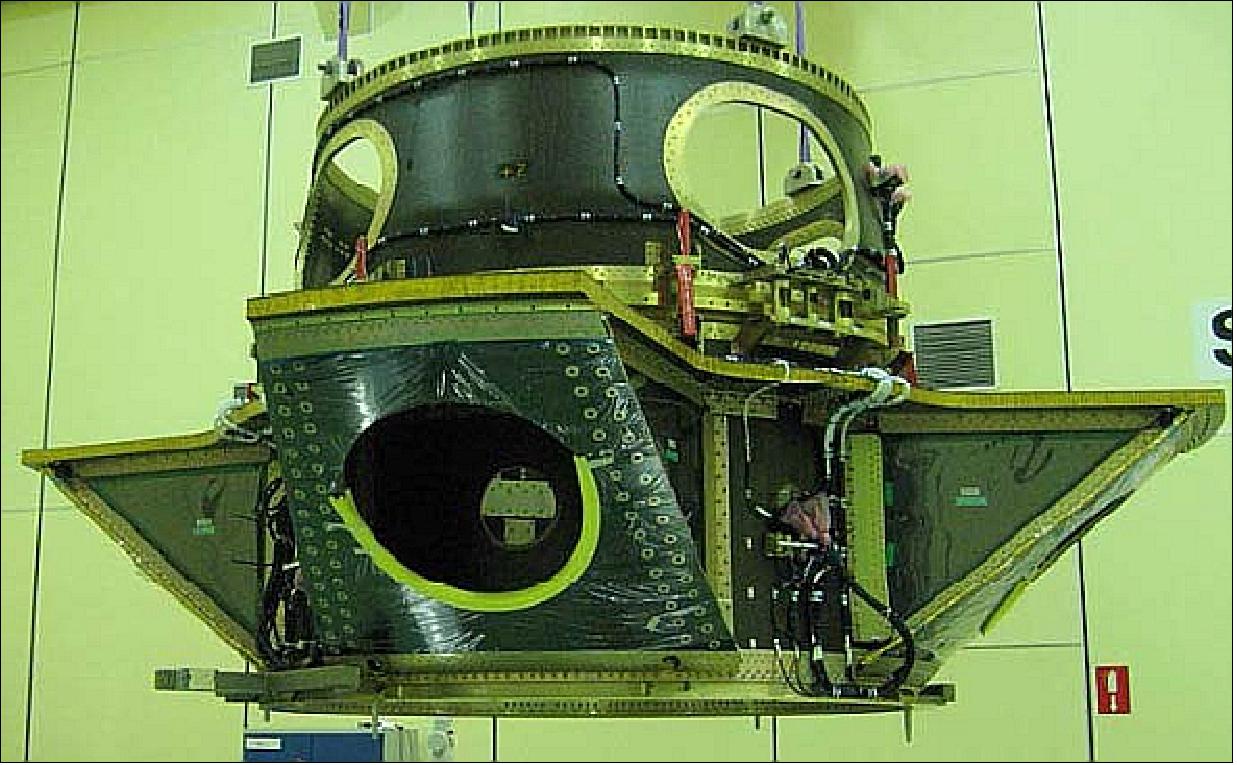
Legend to Figure 9: The ASAP-S structure is based on a massive rigid low plate made of alloy, which provides the interface with the launcher and supports the propulsion system. This plate provides the vertical stiffness required by the launcher. The structure is completed by four vertical struts at each angle of the satellite and by four lateral panels made of alloy honeycomb, which concur to the lateral stiffness. The ASAP-S structure has a total mass of 425kg, a total height of 1.841 m, and a diameter of 1.875 m. 22) 23)
Launch
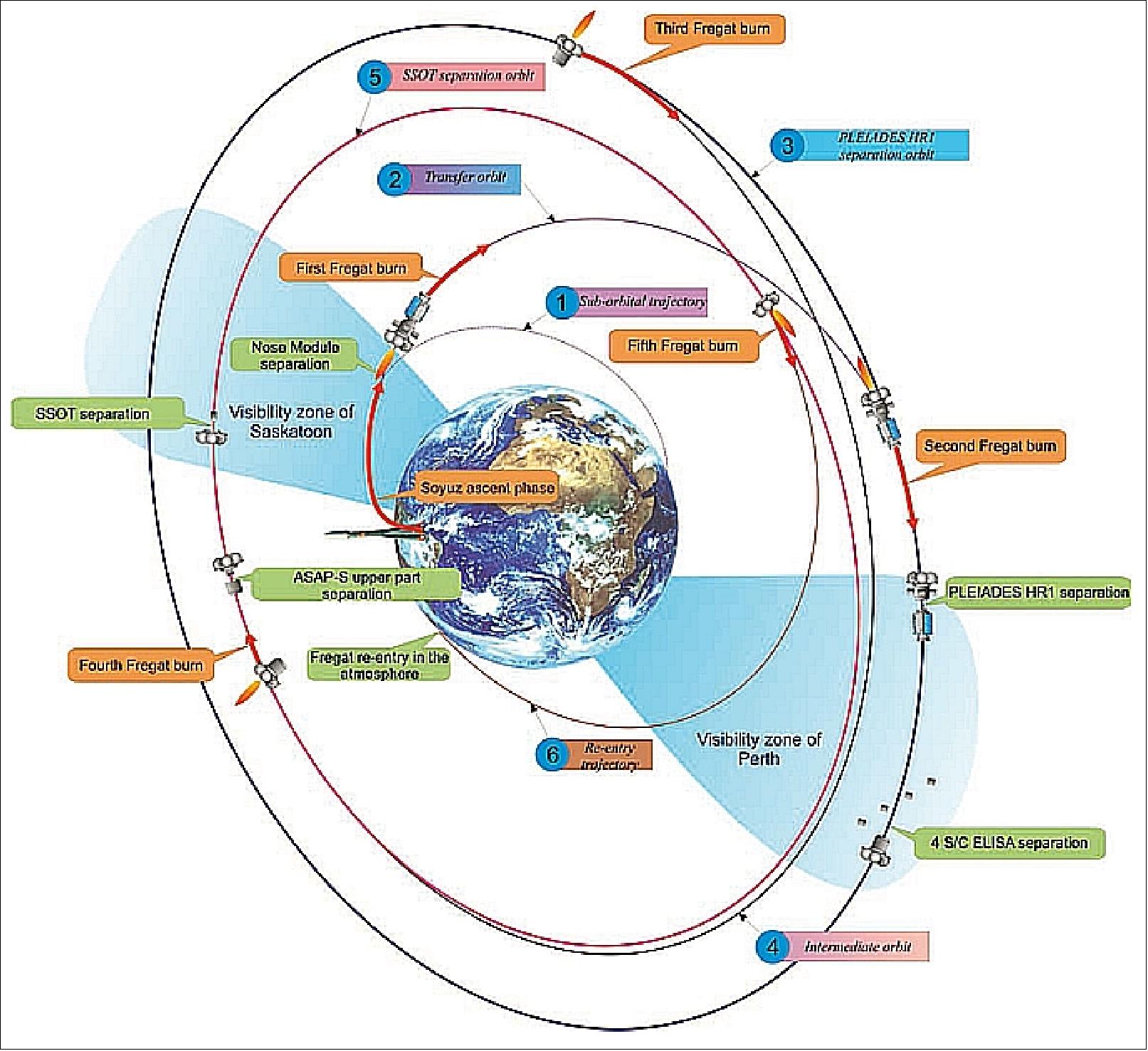
The Pleiades-1A spacecraft was launched on December 17, 2011 on a Soyuz ST launcher (with Fregat upper stage) from Europe's spaceport in Kourou, French Guiana (launch provider: Arianespace). The flight was designated as VS02 (Vehicle Soyuz 02) in the Arianespace launcher family numbering system. The mission involved four burns of the Soyuz' Fregat upper stage, which enabled the six satellites to be released for operations at altitudes ranging from 700 km to 610 km. The Fregat upper stage performed a 3 hour, 26 minute flight to deploy its payload. The Fregat upper stage used a new purpose-built payload dispenser developed for Arianespace's Soyuz missions. Flight deployment sequence (Figure 11): 24) 25)
- The Pleiades-HR1 (primary payload) was deployed first after 55 minutes at an altitude of ~694 km
- The 4 ELISA satellites (secondary payloads) were released at ~ 700 km, 59 minutes after lift-off.
ELISA-1, ELISA-2, ELISA-3, ELISA-4 (Electronic Intelligence Satellite). A constellation of 4 ELINT (Electronic Intelligence) spacecraft of CNES/DGA, France. The ELISA demonstration constellation of microsatellites is based on the Myriade platform of CNES and was developed by by EADS/Astrium SAS and TAS-F (Thales Alenia Space-France) as co-prime contractors. Each spacecraft has a mass of 120 kg.
- This was followed by another orbit maneuver after which the SSOT satellite (secondary payload) separated from the Fregat stage, 3 hrs. 26 min. after lift-off at an altitude of 610 km.
SSOT (Sistema Satelital para Observación de la Tierra) of ACE (Agencia Chilena del Espacio - Chilean Space Agency), Chile. SSOT is a high resolution optical Earth observation satellite which was designed, built, integrated and tested by EADS Astrium SAS of France. SSOT has a mass of 117 kg.

Launch:
The Pleiades-1B spacecraft was launched on December 02, 2012 (UTC) on a Soyuz STA/Fregat launcher from Europe's spaceport in Kourou, French Guiana (launch provider: Arianespace). The flight was designated as VS04 (Vehicle Soyuz 04) in the Arianespace launcher family numbering system. 26) 27)
Orbit:
Sun-synchronous phased orbits (180º phasing, 14 and 15/26 rev./day), altitude = 694 km, inclination = 98.2º, local equator crossing time on a descending node at 10:30 hours. The nominal repeat cycle is 26 days. With a roll ”pointing” capability of 30º with respect to the track, world access can be achieved in 5 days with one satellite, and in 4 days with the system's 2 satellites. 28)
Naturally, with two agile spacecraft in orbit (and a FOR of 47º into any direction from nadir), there is the potential to revisit any point on Earth within 1 day (Ref. 28). 29)
RF communications:
An X-band downlink provides a nominal payload transmission rate of 465 Mbit/s in 3 channels, each of 155 Mbit/s capacity. All source data are compressed prior to on-board (mass memory of 600 Gbit EOL). The CCSDS protocol is used for all S/C communications. An S-band link is being used for the support of all TT&C services.
Missions Status
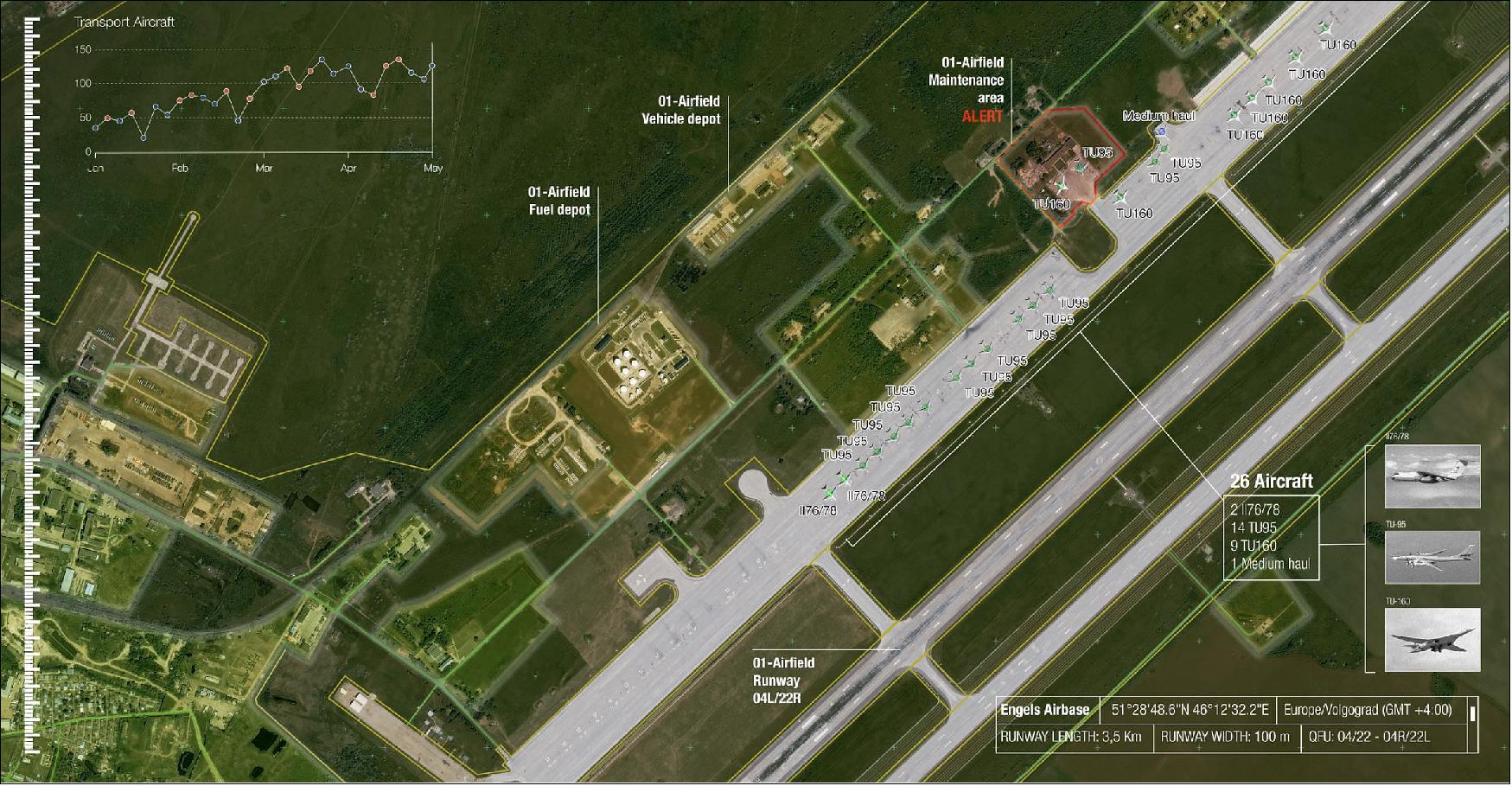
• October 8, 2020: Airbus has teamed up with Earthcube, a French company specializing in geospatial data analysis using AI, to develop and market "Defence Site Monitoring." This online solution, designed for defense actors, integrates advanced satellite imagery from Airbus' Pleiades satellites (with resolutions of 50 cm and 30 cm from Pleiades Neo constellation) with Earthcube's AI expertise in automatic object identification. Their algorithms can detect, identify, and classify both civil and military aircraft and ships. François Lombard, Director of Intelligence Business at Airbus Defence and Space, emphasized Airbus' commitment to supporting national sovereignty and providing intelligence solutions for French and European Armed Forces. Earthcube, as a leader in European AI data processing, collaborates with industrial partners to deliver high-value solutions. The secure Airbus OneAtlas platform allows image analysts to access Defence Site Monitoring for monitoring areas of interest and receive automated alerts and trend analysis reports. This partnership showcases European expertise in meeting the rigorous needs of intelligence services and troops in various operational theatres. 30)
• March 6, 2020: Airbus has launched AgNeo, its new integrated precision farming solution for commodity and permanent crops. Delivering in-season actionable information based on satellite imagery and premium agronomic analytics, AgNeo will help customers save time, optimize inputs and increase yields. Based on imagery-derived health maps from SPOT, Pleiades, Sentinel-2 and Landsat 8 data, AgNeo supports a wide range of capabilities: from alerting features that direct agronomists to scout areas in their fields that require immediate attention, to the creation of management zones and variable rate application maps. Via an Airbus-proprietary processing chain that normalizes data across all sensors, AgNeo customers can also derive absolute agronomic indicators to use as input to their own models for building nitrogen recommendations or establishing water budgets.
- AgNeo also provides enhanced analytics for high value permanent crops such as almonds, apples and grapes. Using 50 cm resolution data from Pleiades, AgNeo creates a mask of all the tree crowns to remove noise from background vegetation and soil, improving the results and bringing analytics to the tree level. These analytics include a stand count inventory eliminating time-consuming and error-prone manual tree counts. The product will be able to utilize 30 cm data from Airbus’ new Pleiades Neo satellites due to be launched later this year. 31)
• September 18, 2019: Airbus Defence and Space has unveiled the latest iteration of OceanFinder, their digital maritime service designed for detecting, identifying, and tracking both collaborative and non-collaborative vessels worldwide. Launched initially in 2018, OceanFinder combines Airbus' optical and radar satellite constellation, real-time global Automatic Identification System (AIS) data, and automated analytics. The recent enhancements to OceanFinder introduce several features, including improved imagery and AIS data correlation to pinpoint the real-time location of non-responsive vessels. The service also boasts fully automated vessel detection and classification using proprietary algorithms, speeding up the process significantly. Airbus' human analysts can now focus on delivering value-added intelligence and interpreting specific behavior or threats without delaying reports. The update also integrates tools for predicting vessel routes and projected locations based on last known positions, dates, trajectories, and speeds. Many of these improvements have been made possible through a strategic partnership with exactEarth, a leading satellite-AIS data services provider. The partnership grants OceanFinder access to exactView RT, exactEarth's real-time satellite-AIS data platform. OceanFinder is conveniently accessible via the OneAtlas web portal, offering a user-friendly interface for customers to 'self-order' the required products 24/7. 32)
• January 30, 2018: Airbus has introduced near real-time satellite imagery capabilities and a 24/7 Emergency Image Delivery Service to assist in emergency situations. Through the utilization of the KSAT (Kongsberg Satellite Services) polar ground station in Svalbard, Norway, the Pleiades and SPOT constellation images are now retrieved during every orbit, ensuring fast worldwide image deliveries anywhere in the world. This enhanced reactivity is coupled with round-the-clock access to a team of satellite experts for customers, offering support during unplanned events. François Lombard, Head of the Intelligence Business at Airbus Defence and Space, emphasized the critical importance of time during crises, highlighting the service's average image delivery time of two hours after acquisition. The 24/7 Emergency Image Delivery Service delivers reliable and accurate satellite images for damage assessment and mitigation efforts, ensuring that satellite resources are prioritized for accelerated data access worldwide. The service is flexible, allowing last-minute modifications or cancellations. These constellations include Pleiades, SPOT 6/7, DMC, TerraSAR-X, and TanDEM-X satellites. 33)
• December 17, 2016: Airbus DS is celebrating the five-year anniversary of the Pleiades-1A spacecraft's presence in orbit. Together with the Pleiades-1B satellite, launched nearly a year later, it forms the Pleiades constellation, an ambitious project designed to generate imagery for every point on Earth at a 50 cm resolution within a few hours. The Pleiades constellation has showcased its response capabilities, such as providing an image of Pedernales, Ecuador, within four hours after the earthquake of April 16, 2016, aiding local authorities in organizing relief efforts and assessing damage. The precision and acquisition speed of Pleiades imagery have been used in documenting the destruction of the ancient city of Palmyra in Syria by the Islamic State in 2015, raising awareness of the need for the preservation of this UNESCO world heritage site. The two European satellites, constructed and operated by Airbus Defence and Space on behalf of CNES (French Space Agency), are the first in Europe to capture Earth with very high resolution. Their agility enables them to target points up to 1500 km on either side of their path, offering rapid zone-pointing capability and multiple shooting modes, including stereo, mosaics, corridor, and specific targets. 36)
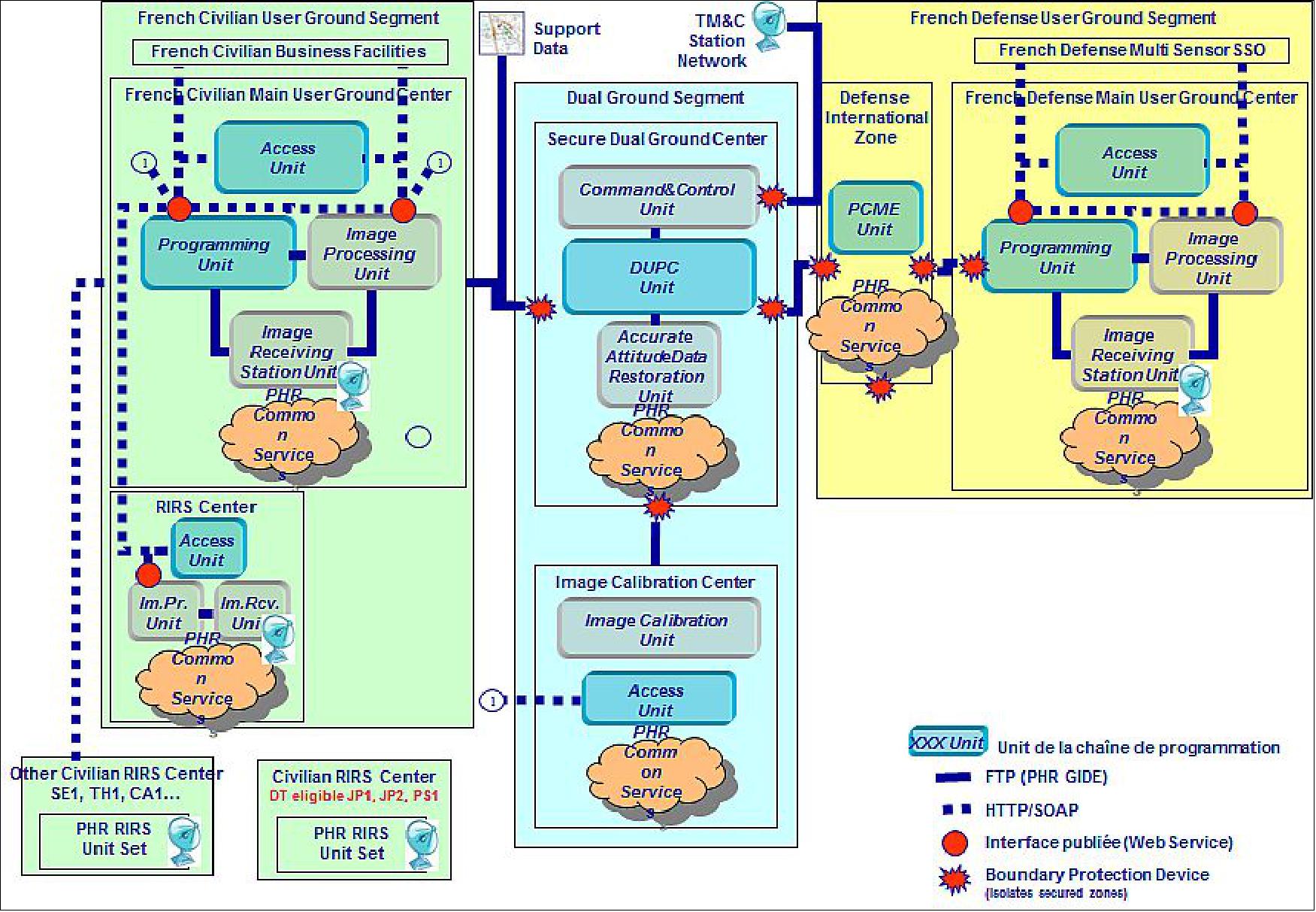
• May/June 2016: The Direct Tasking (DT) concept has been implemented to enhance system reactivity and reduce response times for specific customers. DT involves mission planning with dedicated Regional Image Receiving Stations (RIRS) equipped with S and X band capability, known as Direct Tasking S+X. An extension of DT, called Direct Tasking S- and X-band, combines a standard PHR RIRS (only X-band station) with a standard S-band ground station managed by the French Space Agency's Network Operation Center (NOC). The PHR configuration offers daily revisit capability over any point on the globe, operating for both commercial and French Defense programs. The system comprises five acquisition tracks, delivering a 70 cm resolution with a 20 km ground swath. The satellites' high agility in roll, pitch, and yaw enables approximately 1300 daily image acquisitions. CNES S-band stations are used to upload mission plans to the satellites, and image downloads are handled by Airbus DS Intelligence for calibration, with secure links to CNES. 37)
The different centers are linked as presented in Figure 14.
• September 14, 2015: Thales Alenia Space (TAS) has entered into a contract with CNES, the French space agency, to conduct a feasibility study for a high-resolution optical remote sensing satellite system that will follow the Pleiades satellites, with a planned launch in the early 2020s. The study, conducted in the latter half of 2016, will determine the system's optimal design and select the applicable technologies. TAS, known for providing high-resolution optical instruments in Europe since Helios-1 in 1995, will work with Airbus Defence & Space to contribute to the system-level design of the satellites, with a focus on payloads and associated systems. The satellite will serve as a platform for testing advanced technologies developed through R&D efforts funded by the French Ministry of Defense's procurement agency (DGA) and CNES, including the OTOS (Observation de la Terre Optique Super-Résolue) program.
• September 11, 2015: Airbus Defence and Space has just signed a feasibility study contract with CNES, the French space agency, for future French space-based civil and military Earth observation systems. This contract was announced by CoSpace, the joint government-industry committee on space, which met today in Paris, in the presence of Emmanuel Macron, Minister for the Economy, Industry and Digital Affairs, Jean-Yves Le Drian, Minister of Defence, and Thierry Mandon, Minister of State for Higher Education and Research, along with representatives of the ministries concerned. 40)
• April 10, 2015: The SPOT-1 to -5 mission archive, the SPOT-6 and -7 mission archive and new acquisitions, the Pleiades mission archive and new acquisitions, and the SPOTMAPS 2.5 complete dataset are now available to the scientific user community. 42) Satellite products are offered in various levels, including levels 1A/1B and orthorectified level 3 for SPOT-1 to -7, as well as primary and orthorectified levels for Pleiades. Stereo and Tri-Stereo modes are accessible for SPOT-6, SPOT-7, and Pleiades. These products can be obtained for free through project proposal submission via the SPOT and Pleiades information areas on ESA's Earth Online Portal. Pleiades, as an ESA Third Party Mission, provides complimentary access for scientific research and application development, covering a range of Pleiades collections, both archived and new acquisitions, in various acquisition modes. 42) 43)
• January 2015: Pleiades, the high-resolution satellite operated by Airbus Defence and Space, documented the formation of a new island in the Tonga archipelago in Polynesia between July 2014 and January 2015. Hunga Tonga emerged as a result of volcanic activity in the "Ring of Fire" region, situated between two smaller islands in the Tonga archipelago. The underwater volcano, Hunga Tonga, became active on December 20, 2014, and a massive crater formed, connecting one of the islands to the crater while erasing all vegetation. The new crater has a diameter of approximately 1.5 km. By January 19, 2015, Pleiades satellite imagery indicated that the volcanic eruption was subsiding, as observed by Tongan geologists. 44)

• September 2014: Pleiades, a dual system serving both defense and civil users, operates under a Public Service Delegation model. Airbus DS manages tasking and production for institutional users while maintaining cost-efficiency through synergy with the commercial market. Coordination and optimization are overseen by IGN (Institut Géographique National) and system supervision is the responsibility of CNES. Challenges persist on the user side in managing the high volume of Pleiades products, emphasizing the importance of ongoing tool and software improvement efforts. Technology development activities, such as "OTOS" from 2013 to 2016, focus on enhancing performance, readiness, and maturity for a 2021 launch. The mission study "Arctos" aims to find the best compromise among various stakeholders for post-Pleiades initiatives, with a Mission Definition Review scheduled for mid-2014 to kickstart the phase A study.
• March 28, 2014: The Pleiades-1A and -1B missions are operating nominally. 50) Pleiades-1B image quality status after commissioning and 1st year in orbit. This applies to the geometric performances such as pointing, location, planimetric and vertical accuracy. 51) Pleiades-1B excels in pointing accuracy, exceeding requirements with a comfortable margin, achieving 275 m LE99.7 across track (compared to a 500 m requirement) and 520 m LE99.7 along track (compared to a 1000 m requirement). Location accuracy assessment relies on onboard data alone, using ephemeris and raw attitudes, with geolocation accuracy confirmed through numerous acquisitions over qualified Ground Control Points distributed globally. During commissioning, Pleiades-1B demonstrated outstanding location accuracy, with 8.5 m CE90 at a 30º viewing angle, surpassing the satellite's 12 m CE90 requirement at 30º. Planimetric accuracy is assessed by evaluating residual errors after geometric model reset using a Ground absolute reference, achieving XY accuracy under 0.2 m and Z accuracy under 0.3 m. Auto calibration without reference sites involves cross-acquiring images with opposite viewing angles, with correlation revealing static and dynamic residues along lines and columns. 50) 51)
• January 1, 2014: Formerly known as EADS, the company rebranded as the Airbus Group, featuring three key divisions: Airbus for commercial aircraft, Airbus DS (Airbus Defence & Space) for defense and space activities, and Airbus Helicopters for both commercial and military helicopters. In 2013, the former Astrium subsidiary was merged into Airbus DS, which commenced executive-level operations in January 2014. The reorganization aimed for full integration of Airbus Military, Astrium, and Cassidian within Airbus DS, following a consultation process with works councils, expected to be completed by mid-2014. 73) 74)
• October 2013: More than one and a half years after the first satellite’s launch, the Pleiades system is in proper condition and the two satellites are fully operational, offering suitable image quality. The system offers an acquisition capability of more than 500 images per day and per satellite, and its availability is close to 100%. Regional image receiving stations have been installed (Japan, China and Canada). The coordinated operation of the Pleiades satellites, spaced 180º apart in orbit, ensures daily access to global locations. The Pleiades system includes a dual-access concept, dividing tasks between a Defense channel for high-priority military requests and a Civil channel managed by Astrium Geo-Information Services for non-commercial use. The system's agility allows for mosaicking, stereoscopic acquisitions, and rapid image sequences, making it suitable for diverse applications, from crisis response to land planning and more. With an orbit designed for quick revisits, Pleiades provides essential information for both civil and military purposes, ensuring a broad range of users receive timely and accurate data. For example, to acquire in the same pass stereoscopic pairs or tri-stereoscopic triplets even with a low base over height ratio, a very important improvement in order to avoid hidden objects in an urban area (occlusions), see Figure 18 acquired in 2013. 52) 53)
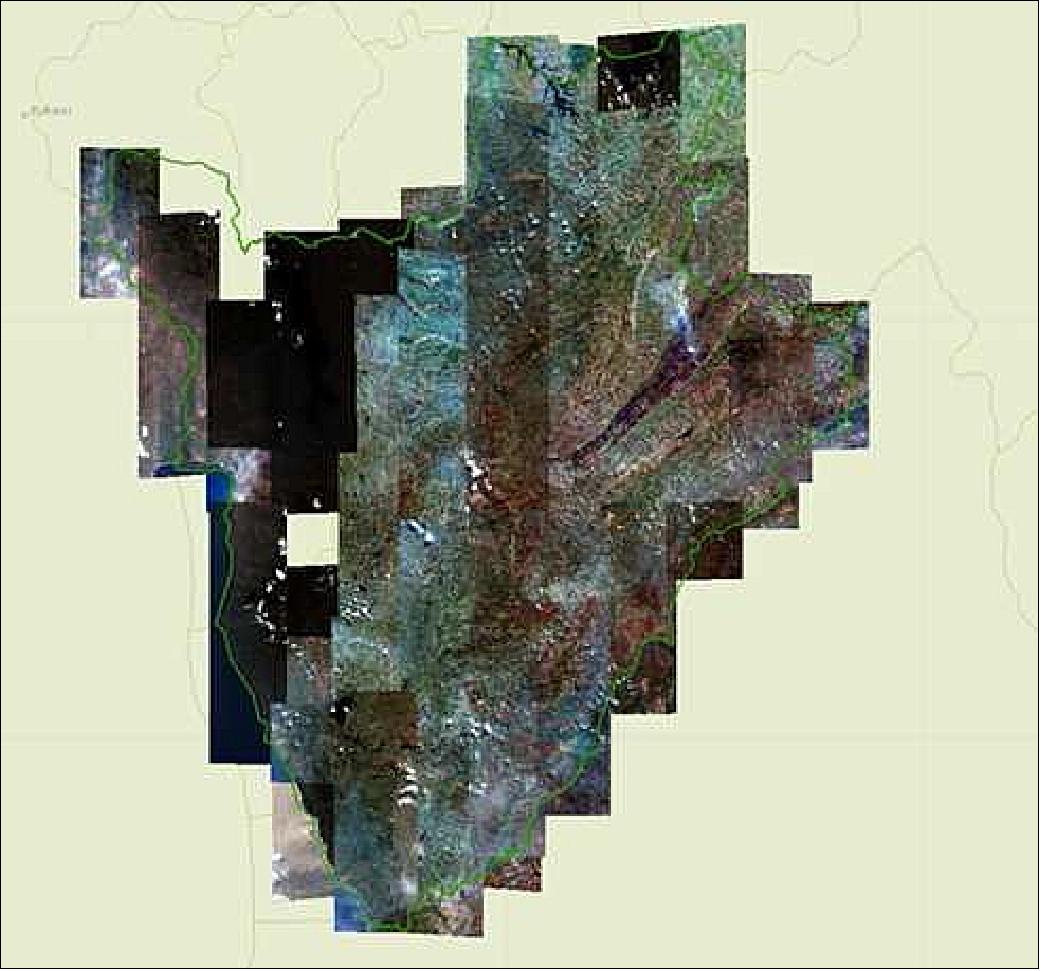
Pleiades has demonstrated its capability to acquire cloud-free images very quickly (more than 50% of the images have a cloud cover better than 10%). As an example on climatological difficult areas (Figure 19), 94% of Burundi have been acquired and validated within 4 weeks and 3 segments of 90 km have been acquired cloud-free over Amazonia on a single pass.
• September 19, 2013: The 50,000 ton Italian cruise ship, Costa Concordia, which ran aground on January 13, 2012 due to error made by its Captain was righted after massive salvage efforts by a team of engineers and mariners. This has been the most expensive salvage operation in marine history. The very high resolution Pleiades satellite, captured the refloating on 17 September of the Costa Concordia (Figure 20), wrecked off the Island of Giglio, Italy. 54) 55)

• March 2013: Pleiades-1B has successfully completed its technical commissioning phase and is now available for commercial use. This latest Pleiades satellite offers 50 cm resolution and an impressive 20 km swath, similar to its twin, with standard orthorectified imagery and multiple tasking options. Notably, the Pleiades twins function as a cohesive constellation, sharing the same orbit, enabling a daily revisit capability to ensure timely and precise information delivery to customers. Astrium Geo-Information Services acts as the civil operator for the Pleiades constellation, encompassing Pleiades-1A and Pleiades-1B, and also manages the SPOT-6 and SPOT-7 constellation. The launch of SPOT-7 in 2014 will complete a 2 x 2 satellite constellation, with all spacecraft coherently operated on the same orbital plane through a unified interface. 56) 57) 58)
• February 22, 2013: Astrium Geo-Information Services and ESA are pleased to announce the availability of Pleiades-1A data for GMES users starting on March 4, 2013. Orders received after that date will be fulfilled taking into account the contribution of Pleiades as described in the Data Access Portfolio 2.6.1, archived data being available since 1st of March 2012. 59) 60)
• December 5, 2012: Pleiades-1B acquired its first images. 61)

• August 2012: Pleiades-1A has successfully captured over 10,000 images, showcasing its robust performance and high operational availability. Moving forward, the mission's continued success relies on the dedicated efforts of operational teams, who will prioritize meeting user demands and ensuring the satellite's well-being for the foreseeable future. (Ref. 7).
• June 26, 2012: The Image Quality in-flight commissioning ended. During the six-month commissioning phase following the satellite launch, the CNES Image Quality team conducted an assessment of image quality and calibration operations, covering two main categories: radiometric and geometric image quality. The advanced capabilities of PLEIADES-HR's agility facilitated the development of innovative image calibration and performance assessment methods. Radiometric activities focused on key aspects such as MTF assessment, refocusing operations, absolute calibration, inter-detector normalization, signal-to-noise ratio assessment, onboard compression bit rate optimization, and automatic cloud detection. Geometric activities involved the evaluation of localization performance, focal plane cartography, line-of-sight dynamic stability, and 3D rendering capabilities. 64) 65)
• June 2012: The launch of the Pleiades-1B spacecraft is planned for the end of 2012. All the calibrations were performed; the precise measurement of the performances are still ongoing satisfactorily: the end of the Image Quality Commissioning Phase is scheduled for the end of June 2012. 67) Astrium GEO-Information Services is the authorized distributor of high-resolution commercial imagery products from the Pleiades program. In exchange for financing 90% of the program, the French government has secured specific access rights to 900 daily images from both Pleiades satellites once they are in their 694 km orbit, spaced 180º apart. The French Defense Ministry holds priority access to 50 of these daily images, while civil agencies of the French government are allocated 40% of the remaining output, leaving Astrium Geo-Information Services with 60%. The commissioning phase was completed on March 2, 2012, with the Pleiades-1A system declared fully operational, despite minor issues in accurately measuring certain image quality parameters. 67)

• December 16, 2011: The Pleiades-1A satellite imager captured its initial panchromatic satellite images just three days after a successful launch via a Russian Soyuz ST rocket from the Kourou launch site in French Guiana. Pleiades-1A represents the first very high-resolution satellite of the SPOT family and will be capable of providing orthorectified color data at 0.7 m resolution and revisiting any point on Earth as it covers a total of 1 million square km daily. Perhaps most importantly, Pleiades-1A will be capable of acquiring high-resolution stereo imagery in just one pass, accommodating large areas (up to 1,000 km x 1,000 km). Pleiades-1A is a significant addition to the SPOT family, capable of delivering orthorectified color data at a remarkable 0.7 m resolution and covering a vast area of 1 million km2 daily. Importantly, it can acquire high-resolution stereo imagery in a single pass, accommodating extensive areas up to 1,000 km x 1,000 km. 71)

Figure 24: Three days after its launch, Pleiades-1A returned this image of the Hassan II Mosque in Casablanca, Morocco (image credit: CNES, Astrium, Ref. 71)
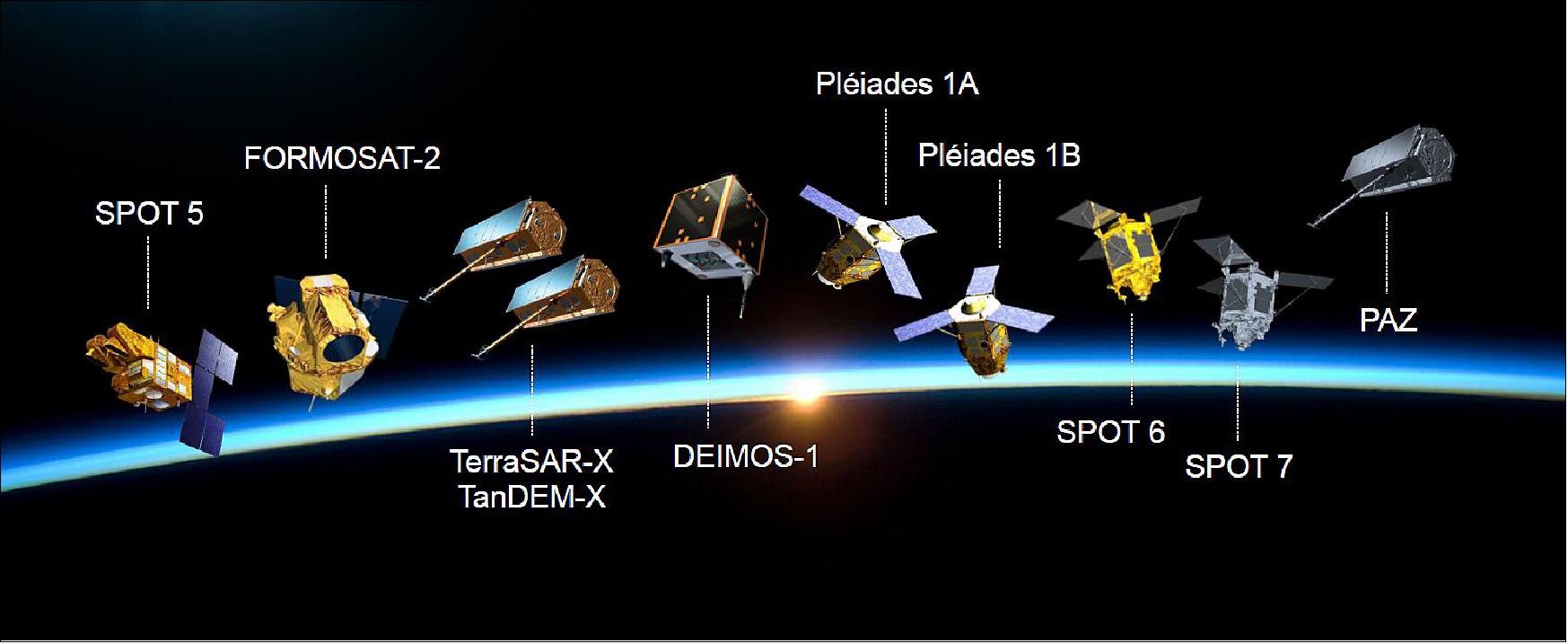
• January 1, 2011: Spot Image and Infoterra joined forces within Astrium Geo-Information Services to offer a consolidated product and services portfolio under the Astrium brand. A unified operational management structure brought together the expertise of satellite imagery and geo-information specialists Spot Image and Infoterra, forming the GEO-Information division within Astrium Services. This integration aimed to create a global, customer-focused company to better meet customer needs. The GEO-Information Services division offers a comprehensive solution, serving as a one-stop shop for data from various missions, including SPOT-4, SPOT-5, TerraSAR-X, TanDEM-X, FormoSat-2, and the Pleiades constellation, which also encompasses imagery from the SPOT-6/7 constellation. They provide a wide range of satellite and aerial data and offer a single product and services portfolio covering the entire geographic information value chain, from satellite imagery to value-added services and turnkey solutions. The Pleiades system operates with two operators according to predetermined quotas: Astrium Geo-Information Services acts as the civil operator, while the French defense system (DGA) serves as the defense operator. Astrium Geo-Information Services takes over spacecraft operations for the civil channel with an exclusive license once each Pleiades satellite has been commissioned. 72)
Sensor Complement
HiRI (High-Resolution Imager)
HiRI of CNES with Thales Alenia Space (TAS-F) as the prime contractor for this instrument (formerly Alcatel Alenia Space). The objective is to provide high-resolution multispectral imagery with high geo-location accuracy. The camera design employs a pushbroom imaging concept. Extensive use of existing state-of-the-art technologies is made regarding such items as:
a) camera alignment procedures,
b) telescope thermal control and mechanical assembly principles,
c) video processing techniques. 75) 76) 77) 78) 79)
The industrial team consists of the following partners:
• Thales Alenia Space, France: Instrument, telescope, detection unit, telescope structure & thermal control, video electronics, video power supply, harness
• Thales Alenia Space España: Instrument service module
• Sener: Shutter, detection unit structure & thermal control
• E2V (Chelmsford, UK): Pan & MS CCD imaging detectors
• SESO (Société Européenne de Systèmes Optiques), France: telescope mirror manufacturing
• EADS Sodern: FPA (Focal Plane Assembly)
• Sagem: Spectral filters.
Equipment | Technology | Implementation |
Panchromatic detector | CCD detector array with TDI (Time Delay Integration) mode of operation and anti-blooming structure | High resolution imaging without satellite slowing. No light spreading due to blooming. |
Very long multispectral stripe filters | Assembly of a single substrate with 4 stripe filters over the detector window | Separate the different spectral bands in the FOV. Minimize chromatic aberrations |
Highly integrated detection unit | Integrated focal plane and video electronics. Highly integrated ASIC technology | Compact detection function integrated in the camera |
Telescope | Carbon / carbon structure and light-weighted Zerodur optics | Low mass/high thermal stability, highly polished mirror surfaces |
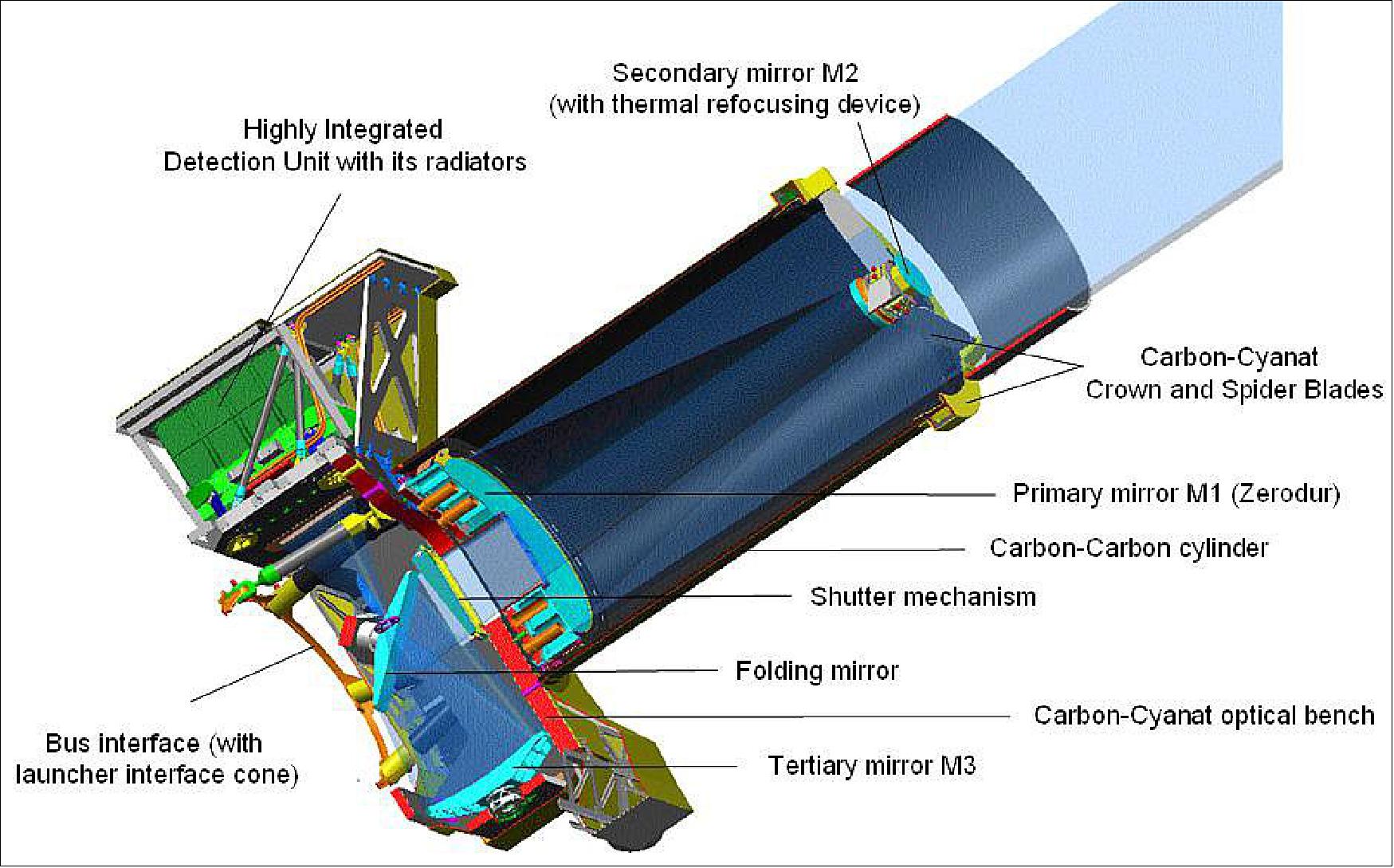
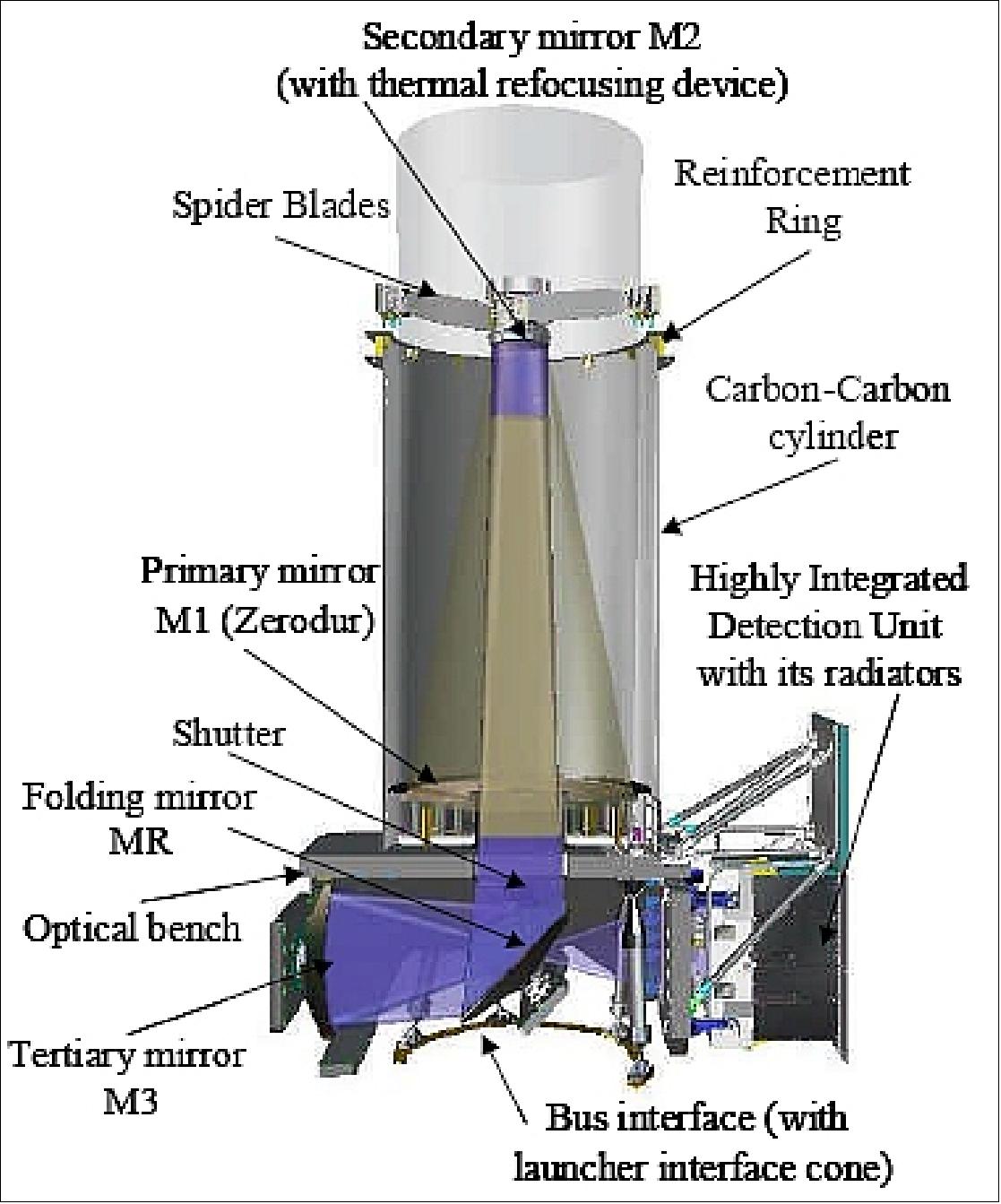
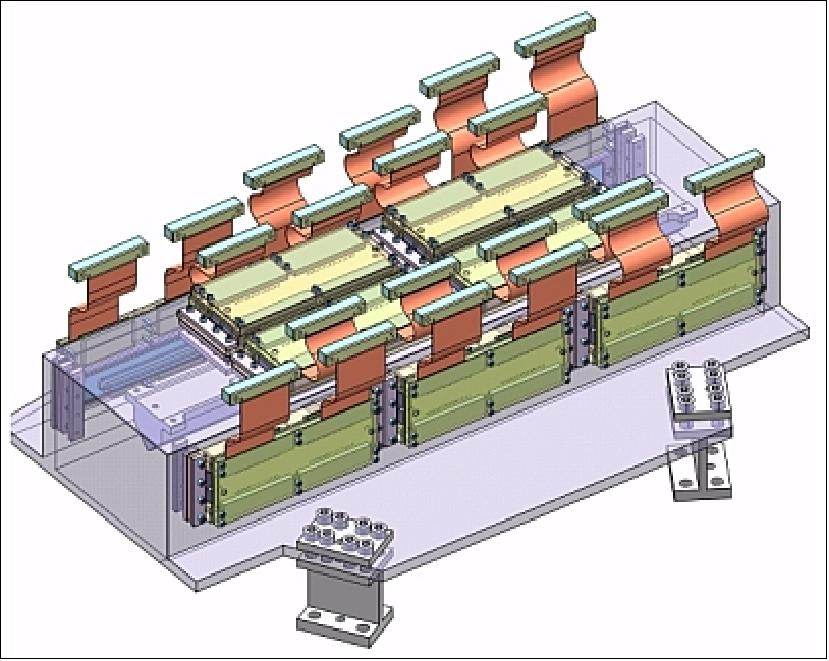
Optical assembly:
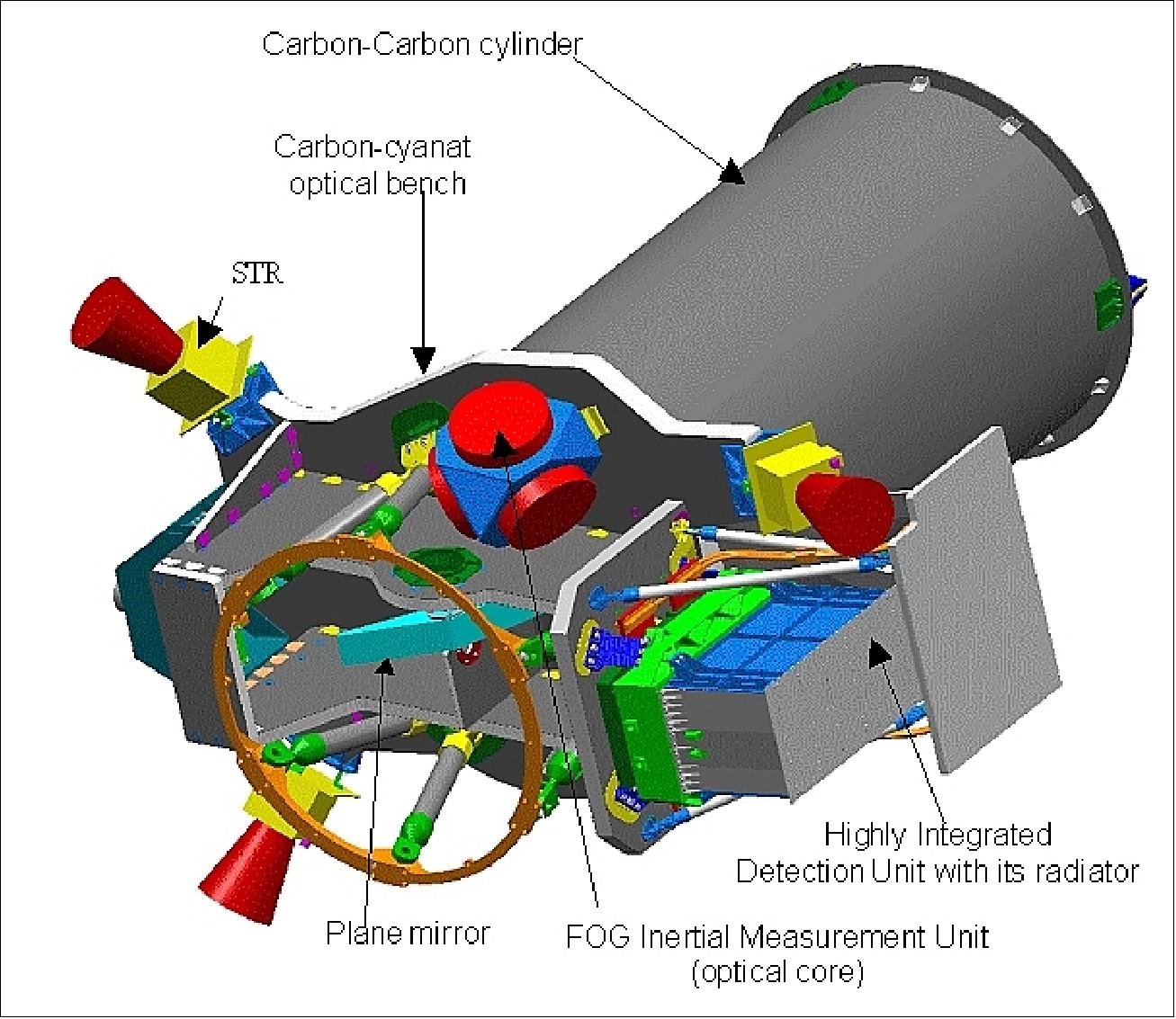
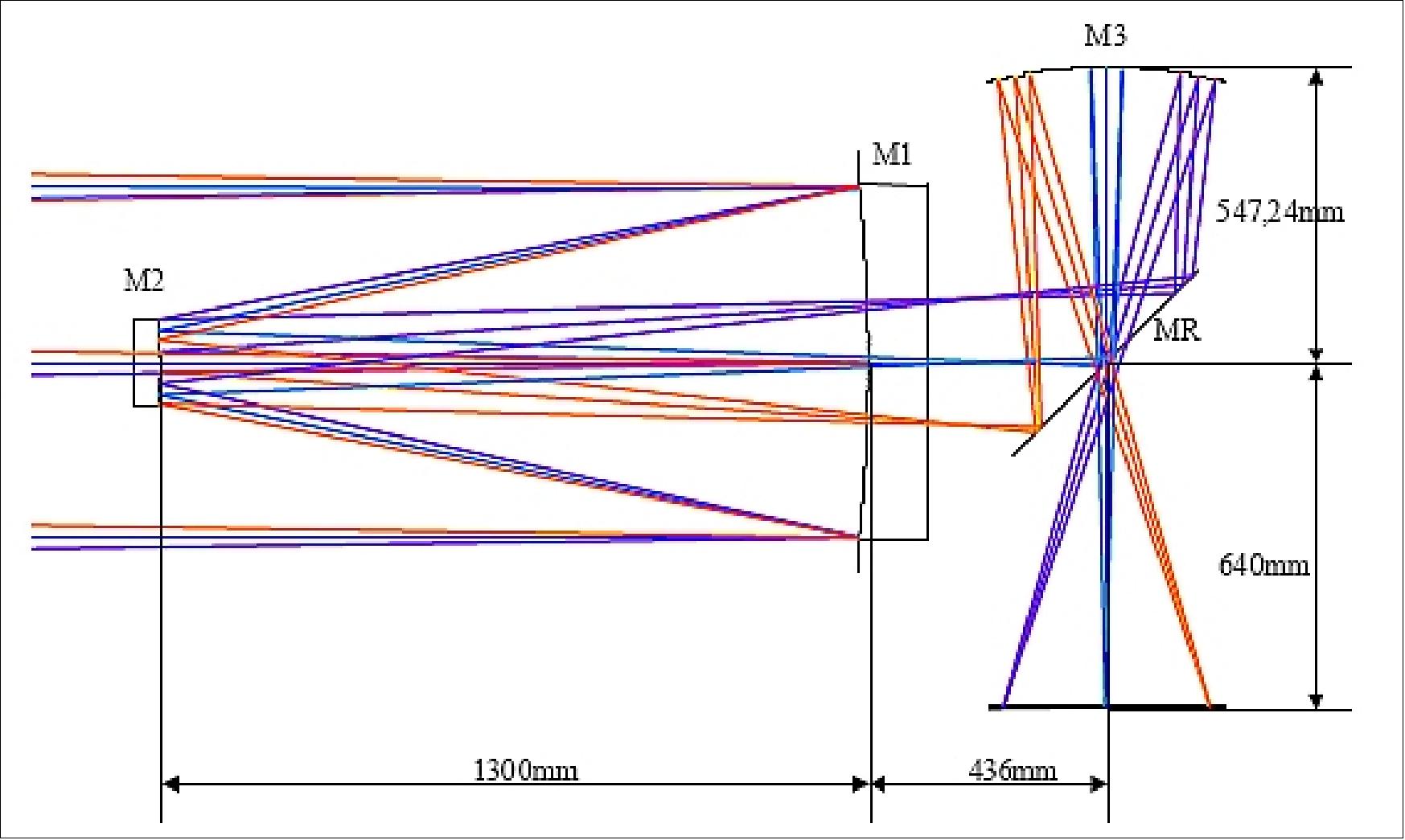
The instrument employs a Korsch all-reflective 4 mirrors telescope design with TMA (Three Mirror Anastigmatic) optics. An additional plane mirror (MR) is used to enhance the instrument compactness. The imaging geometry optimization features a primary mirror size of 650 mm diameter, which suits well to the detectors performance and the orbit characteristics.
The instrument architecture chosen is organized around a central plane structure supporting the primary mirror, the tertiary mirror, the plane mirror (MR), and a central cylinder that supports the secondary mirror. The optical assembly consists of an on-axis part (M1 + M2 collector mirrors) and an off-axis part (M3 + MR mirrors) feeding the different focal planes. 80) 81) 82)
The Korsch TMA telescope has a focal length of 13 m and an aperture diameter of 65 cm.
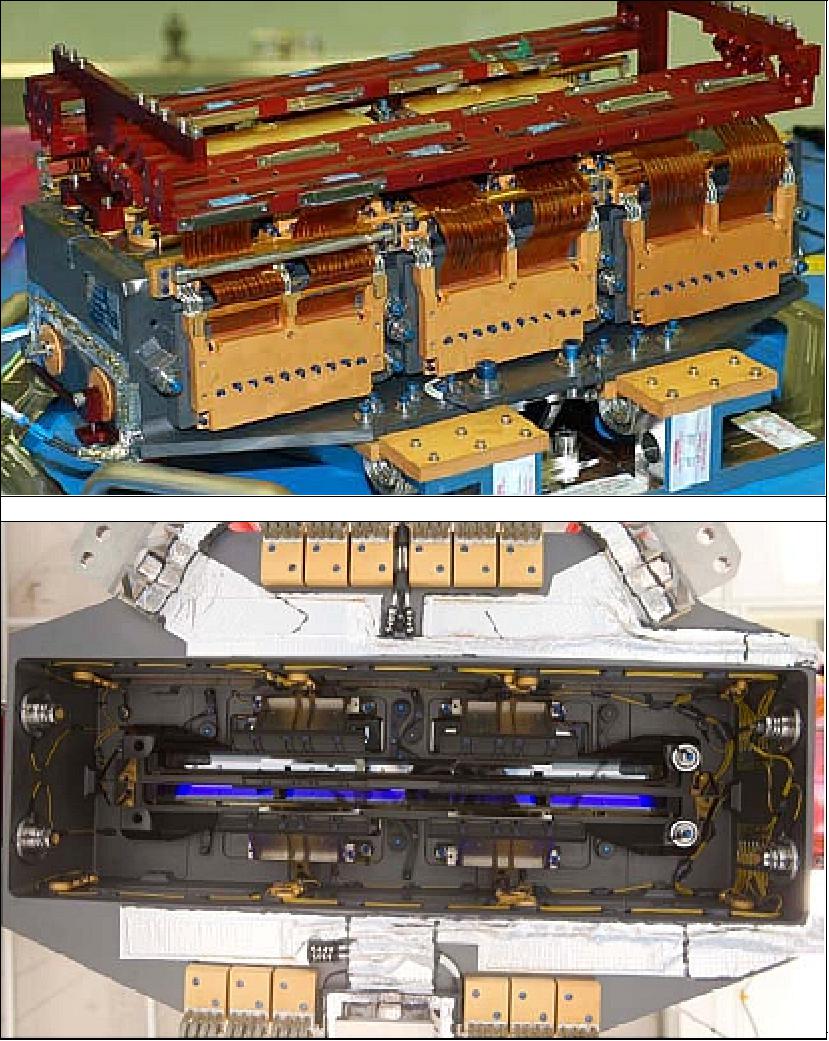
The optics system of the instrument uses state-of-the-art techniques such as SiC-100 (silicon carbide) material for the mirrors and the telescope structure, specific detectors, and a modular video chain design. EADS Sodern is responsible for the development of the FPA. The FPA is offering a wide variety of new technologies for the imaging function.
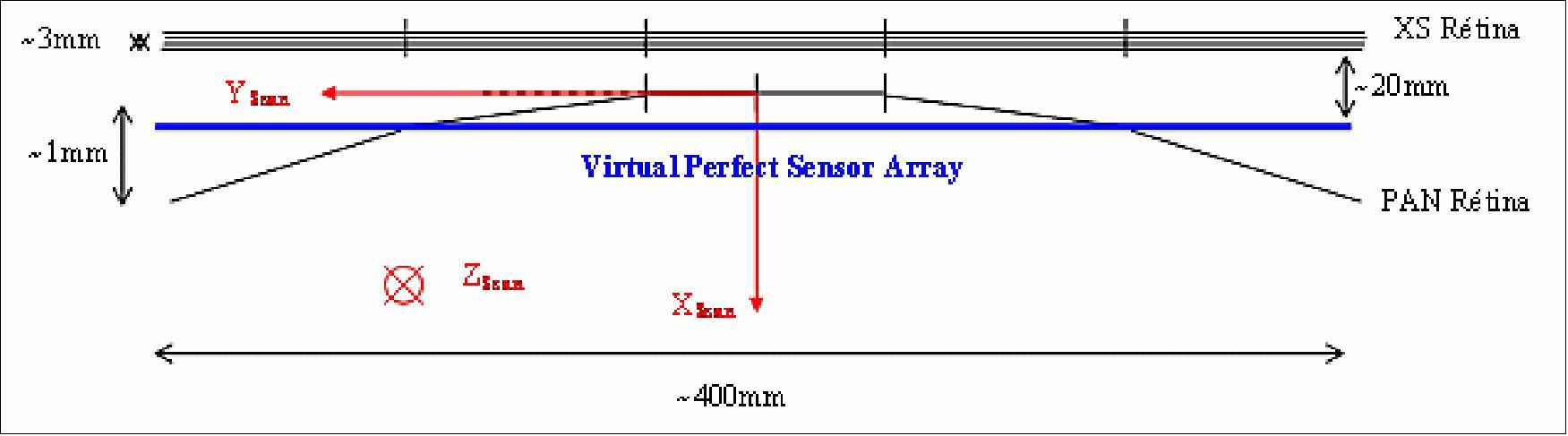
The size of the observed image is close to 400 mm and is analyzed in 30,000 samples in Pan and 7,500 in MS. The focal plane assembly consists of two symmetrical arrangements of Pan and MS detectors. The beam splitter is made of a set of mirrors.
The spectral selection is made by optical filters placed very close in front of the detectors. Pan filters and MS stripe line filters are space-qualified multi-layer coatings deposited on glass substrates. Each filter is composed of a high-pass filter and a low-pass filter. An absorbing material deposited between the MS filters isolates each band from the others to avoid interband straylight.
Attitude sensors (star tracker heads and gyroscope heads) are placed on this central instrument structure to improve the performance. A dedicated supporting truss structure ensures the instrument interface with respect to the bus. The detector thermal radiator has its own supporting structure.
The instrument design employs carbon material for the structure (the carbide characteristics are: very low coefficient of thermal expansion, very low density, resulting in a light telescope, and a simple thermal control) and Zerodur material for the mirrors.
The instrument focus mechanism is placed onto the tertiary mirror. This position offers an optimum between mechanism and accuracy. The instrument also includes an internal shutter to protect it from sun radiation in non-operational phases such as launch, attitude acquisition, or safe modes. The shutter is placed behind the primary mirror to protect only the tertiary mirror and the detection cavity.
Spectral bands | Pan: 480-820 nm; TDI is only used for Pan data |
Optical system | 65 cm aperture diameter, focal length of 12.905 m, f/20, TMA optics |
Spatial resolution, GSD | 0.7 m for Pan, 2.8 m for MS bands |
Swath width, FOR | 20 km at nadir, 60º (FOR=Field of Regard); Each satellite will be able to collect imagery anywhere within an |
SNR | > 147 (Pan), > 130 (MS) |
MTF in Pan band | 0.07 at Nyquist frequency fe/2 (1/2 x 0.7 m-1) Note: “fe” is the sampling frequency (fréquence d'échantillonnage) |
Detectors | Pan array assembly: 5 x 6000 (30,000 pixels cross-track) pixel size: 13 µm |
TDI detector data rate | 290 Mpixel/s (total) or about 700 Mbit/s per detector; or 3.5 Mbit/s (max) |
Data quantization | 12 bit per pixel (correlated dual sampling) |
Image location accuracy | 1 m (with ground control points), 20 m without GCP (99.7%), 10 m (90%) |
Image location accuracy | <0.9 pixel Pan over 12 s with a time linear error model (with GCPs) |
Line-of-sight frequency | <0.1 pixel (dynamic stability) |
Source data rate, downlink | 4.5 Gbit/s (max), 465 Mbit/s in 3 x 155 Mbit/s X-band channels |
Data compression | Wavelet compression algorithm with an average compression factor of 4 |
Instrument mass, power | ~ 195 kg (< 14 service electronics), ~ 400 W |
Instrument size | L < 1594 mm |
Pointing agility of S/C | Roll of 60º within 25 s; Pitch of 60º within 25 s |
The Pan band of the detector array makes use of back-thinned TDI (Time Delay Integration) with 5 selectable levels from 7 to 20. The size of the detector array assembly is 5 x 6000 (30,000 pixels or samples in cross-track) with a pixel size of 13 µm. The Pan band employs PhotoMOS-type CCDs [note: the PhotoMOS relays have LED inputs and MOSFET outputs that provide input-to-output isolation - comparing favorable with the isolation obtained from EMRs (Electromechanical Relay)].
The detector array is clocked continuously to give a time-delay-and-integrate (TDI) function. The transfer of charge along the CCD is made synchronous with the velocity of the scan image. The integration time is m times longer than a single-detector integration time, where m is the number of stages in a row.
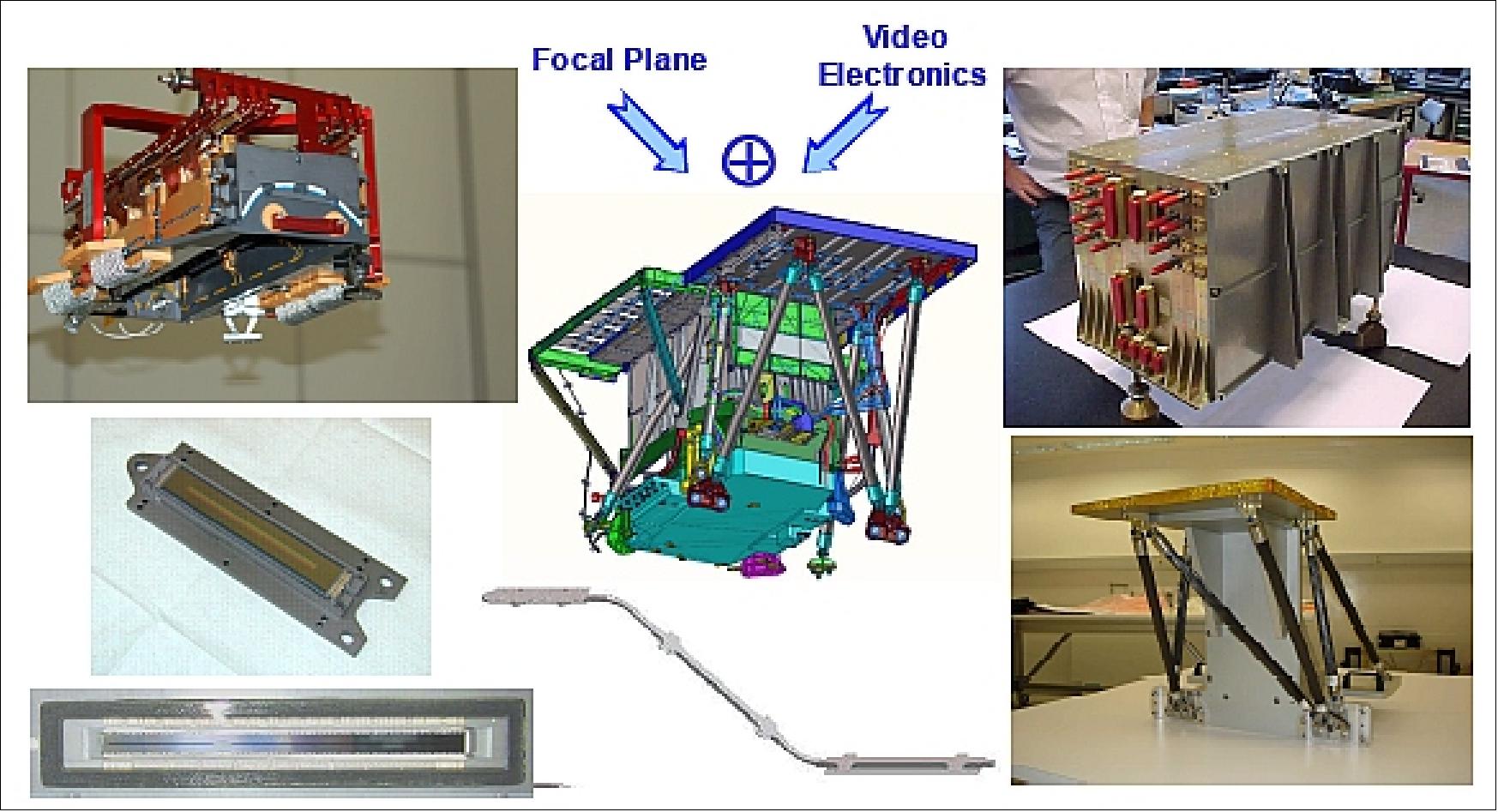
MS bands: Five detector line arrays, each of 1,500 elements (7,500 pixels in cross-track), are utilized for the four MS bands (line arrays). The spacing between the centers of two consecutive lines is 936 µm. Each line array has a pixel pitch of 52 µm.
Each TDI detector outputs data at 58 Mpixel/s (or 290 Mpixel/s total), which amounts to a data rate of about 700 Mbit/s per detector (or 3.5 Gbit/s total in worst case). The MS detectors output at the same frequency their video data. Those video signals are converted in numerical data with individual chains at about 7 Mpixel/s, for maximum SNR performance. The focal plane is physically coupled with the detection electronics to form the integrated detection unit.
The overall unit realizes the functions of detection and conversion of video signals in numerical data. The highly integrated design allows a simplification of the data transmission between the focal plane and the detection electronics.
Note: The spectral band definition deviates somewhat from the SPOT instrument series. The Pan band is enlarged, the MS bands are also wider. The MS and Pan viewing planes are separated only by 1.5 mrad in the field (provided by a separation mirror), thus making Pan and MS channel registration possible by a rather simple ground processing (resampling) step.
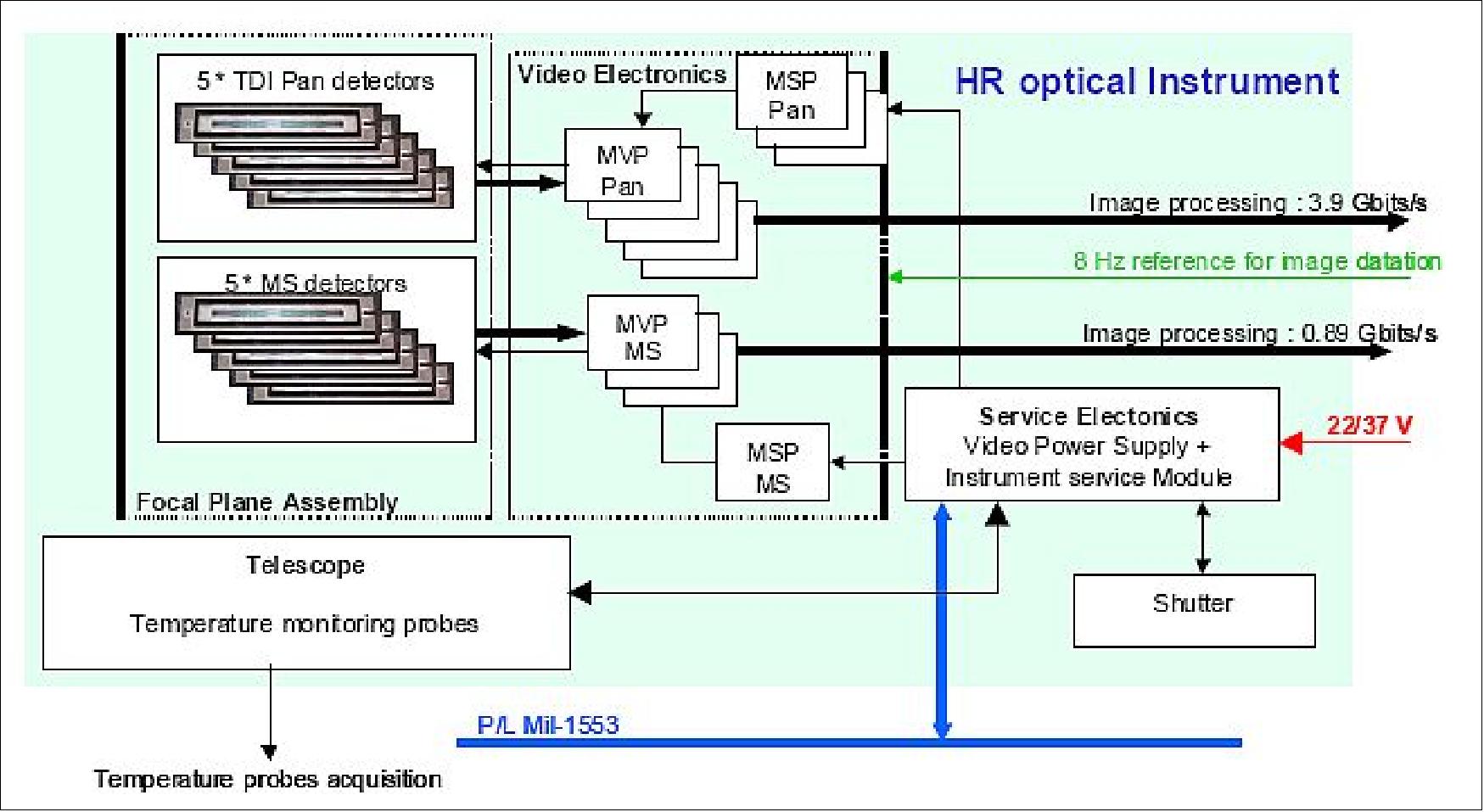
Detector electronics:
The camera system design employs the newly developed SEDHI (Highly Integrated Detection Electronics Subsystem) architecture to support such functions as: a) integrated video processing in the focal plane, b) provision of a high-speed data link, and c) digital onboard processing. 83) 84)
The modular SEDHI concept is implemented on a single board and provides all electronic functions associated to 1 or 2 detectors, from video signal pre-amplification to the digitization of video frame - including various functions such as video signal processing, detector low noise power supply and polarization generation, detector and video processing chain sequencer, detector clock drivers, synchronization interface, command and control interfaces.
The SEDHI concept uses a number of MVPs (Module Video de Proximité) to organize the detection function in the FPA (Focal Plane Array). One MVP is able to process up to 10 CCD outputs, at a maximum pixel rate of 10 Mpixel/s. The high output data rate of an MVP (up to 1.2 Gbit/s) is transmitted downstream through 2 LNTHD (Liaison Numérique Très Haut Débit), which are serial integrated digital interfaces. Two types of hybrid ASICs were developed, a video processing hybrid, and a CCD phase driver hybrid, in support of all processing functions required.
The full detection electronics consist in 5 panchromatic MVPs, 3 multispectral MVPs, 3 panchromatic MSP (embedded in a single mechanical module) and 1 multispectral MSP. The Pléiades instrument electronics include the MVP functions, the MSP (Module de Servitude de Proximité) and the MSI (Module de Servitude Instrument) dedicated to command / control. The PAN detection electronics is divided in 3 blocks:
• 1 block which includes 2 MVPs and 1 MSP
• 1 block which includes 1 MVP (associated to the panchromatic detector in the center of the focal plane) and 1 MSP
• 1 block which includes 2 MVPs and 1 MSP
The modular SEDHI concept has the potential to support the new generation of Earth observation optical systems (large swath width, reduced ground sampling distance, number of spectral bands, etc.), the modularity, the compatibility - for a large number of missions. This “photon in - bit out” concept may be summarized by: radiometric performance optimization at lowest costs.
Parameter | Performance |
Number of PAN video chains | 50 at 6.5 Mpixel/s each |
Number of multispectral video chains | 20 at 3.7 Mpixel/s each |
Output data rate | 6.2 Gbit/s (useful rate 4.3 Gbit/s) |
Size of electronics | 463 mm x 237 mm x 246 mm |
Mass, power consumption | 17 kg (typical), 218 W |
Payload data handling: The MS (Multispectral) video data are output from the instrument, at about 4.5 Gbit/s total output rate, and are compressed in the Payload Data Compression Unit. A wavelet algorithm is used, that enables the compression ratio to go up to 7, while in standard operation the ratio is 4.8. Image data are time-tagged in this unit. The compressed data are stored in SSR (Solid State Recorder) with a capacity of 600 Gbit (EOL). The compression module and the SSR are physically in one equipment referred to as COME (COmpresseur MEmoire). The COME output data rate is nominally 465 Mbit/s on three channels at 155 Mbit/s each. The data cyphering, civil and military, is performed in another equipment, namely the DCU (Deciphering and Ciphering Unit). The data are packetized according to CCSDS standards.
The data are coded following a trellis-coding scheme in 8-PSK-type modulators that include their own SSPA (Solid State Power Amplifiers). They are then multiplexed, and downlinked with an X-band antenna. The X-band antenna employs a corrugated horn (omni-directional) with a 64º aperture. It is mounted on a 2-axis gimbal mechanism to ensure image downlink during imaging and maneuvering sequences (gimballed gyroscopic actuators give the S/C a high degree of agility). This mechanism is not used during imaging periods to minimize any dynamic disturbances. A dedicated antenna pointing algorithm is developed to orient the antenna during satellite maneuvers so that the ground station always stays in the antenna lobe. In this way, the complete ground station visibility is used to downlink imagery.
Pleiades data acquisition modes and performance capability:
The agile Pleiades satellites are capable to image targets along any ground direction within 47º of a vertical viewing position (with very low maneuver durations between two consecutive imaging scenes. Several types of acquisition modes are defined:
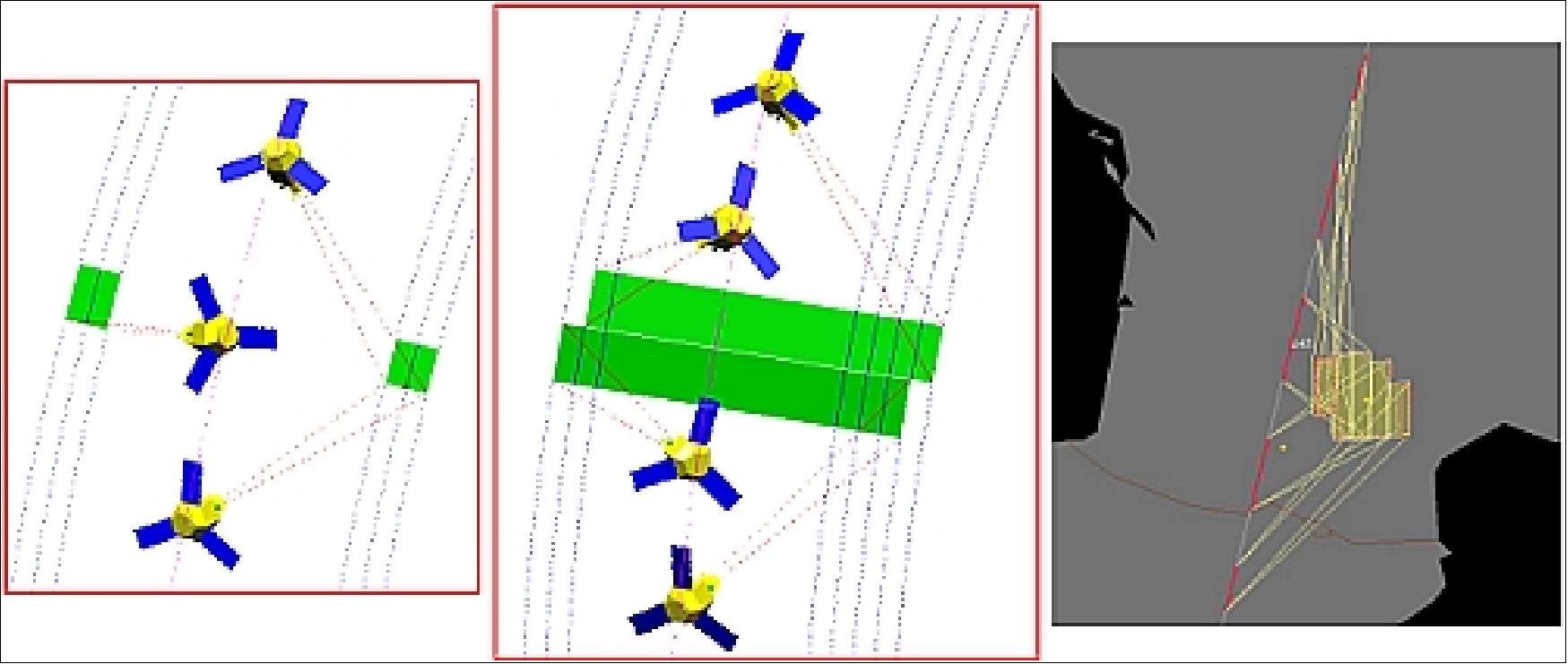
• One-pass acquisition mode: The satellite agility offers the possibility to locally enlarge (widen) the swath by realizing from the same orbit and thus quasi simultaneously the acquisition of several adjacent swaths within the field of regard (FOR). Hence, it should be possible to acquire imagery with an area of approximately 120 km long, and 110 km wide, using the S/C pointing capability (maximal) in roll of 30º.
• Simultaneous stereoscopic or tri-stereoscopic acquisitions mode: This acquisition mode employs a variation of the one-pass mode. Instead of using the agility capabilities to acquire contiguous imagery, the same scene is acquired with two (or three) different view angles as shown in Figure 34.
• Multi-spot mode: Refers to a support mode in which the S/C acquires many spot targets around the S/C ground track, even fore and aft stereoscopic mode if needed. In this mode, the agility capabilities of the satellite are used to acquire the maximum of scenes on a given surface, in one day.
The basic data products of Pleiades are level 0 and level 1 imagery (up to orthorectified imagery). Intermediate products (level-2) are: Mosaicked imagery, DTM (Digital Terrain Model) extracted from stereo pairs.
The main application fields identified for the Pleiades program data fall into the following categories: cartography, agriculture, forestry, hydrology, geological prospecting, dynamic geology and risk management.
Pleiades is a multi applications, multi sensor and multi partnership program. The first generation will only be furnished with an optical high-resolution imager. Wide-field, superspectral, hyperspectral and thermal (TIR) system observation capabilities are options for future Pleiades implementations (with launches well beyond 2009).
Sensor | Resolution (m) | Swath Width (km) | Nr. of Bands | Revisit Time (days) | Main applications |
Wide Field | 2-5 | 40-100 | 3-4 | 3-7 | Cartography, geology, agriculture, forest, hydrology |
Optical HR | ≤ 1 | 10-30 | 3-4 | 1-2 | Cartography, risk, forest, geology |
Superspectral | 3-10 | 100-300 | 6-20 | 1-2 | Agriculture, forest, geology |
Hyperspectral | 5-20 | 50-300 | 30-200 | 2-7 | Geology |
Thermal | 1-40 | 100 | TBD | <1 | Forest fires, geology, ocean |
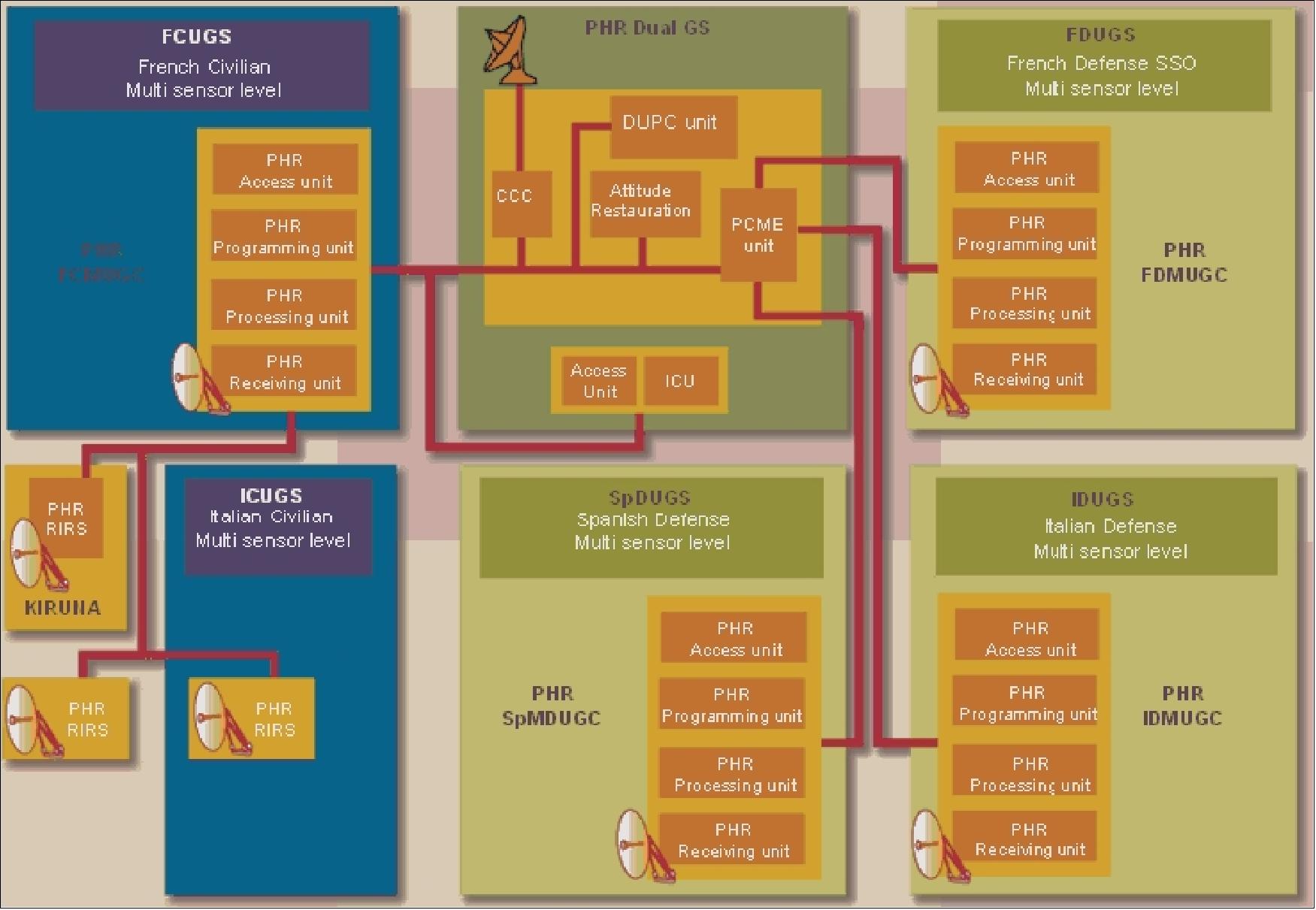
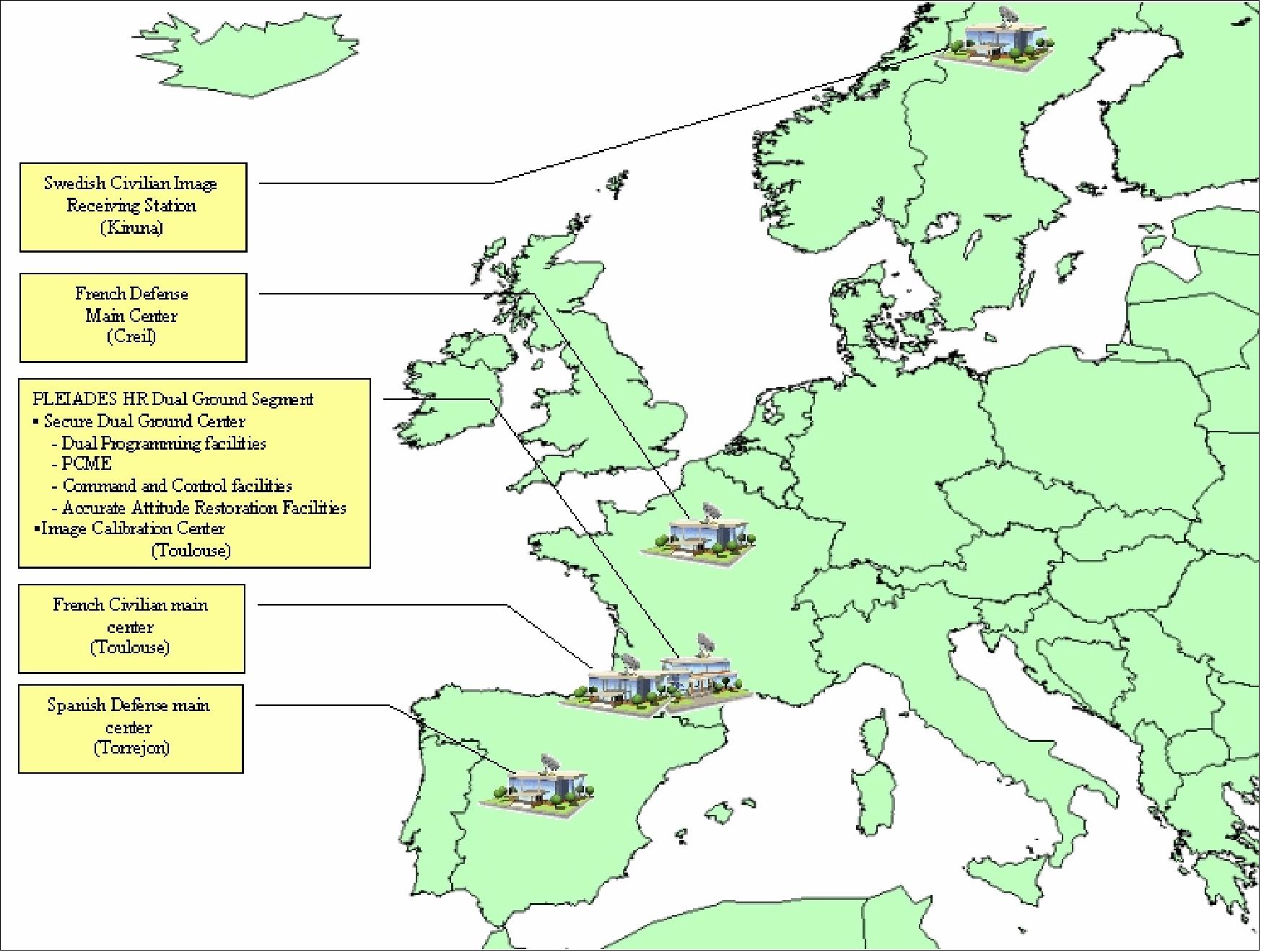
Ground Segment
The Pleiades ground segment is composed of a set of user centers located in France, Sweden, Spain and, optionally, in Italy, all of them being interfaced with a dual center in France. Each user center is able to manage the user image acquisition requests and product generations, they include: 86) 87) 88) 89) 90)
- An X-band antenna for data acquisition, 3-channel signal demodulation and ingestion system
- An image processing unit to inventorize, catalog, and archive the data, and to produce imaging products
- A programming unit to manage the mission planning requests
- A set of access units permitting the users to browse the image catalog, submit requests and to receive the ordered products.
1) Astrium Geo- Information Services (formerly SPOT Image) serves the civilian clients.
• Users can consult the civilian images catalog, submit requests and receive the ordered products
• All civilian requests are centralized by Astrium Geo- Information Services
• Astrium Geo- Information Services insures the civilian antenna management as well as the reception and the archiving of raw data received from satellites
• Astrium Geo- Information Services also manages a network of regional image receiving stations (RIRS). The Kiruna station enables to daily receive the Pleiades images, in complement of the Toulouse station; it is managed as a RIRS.
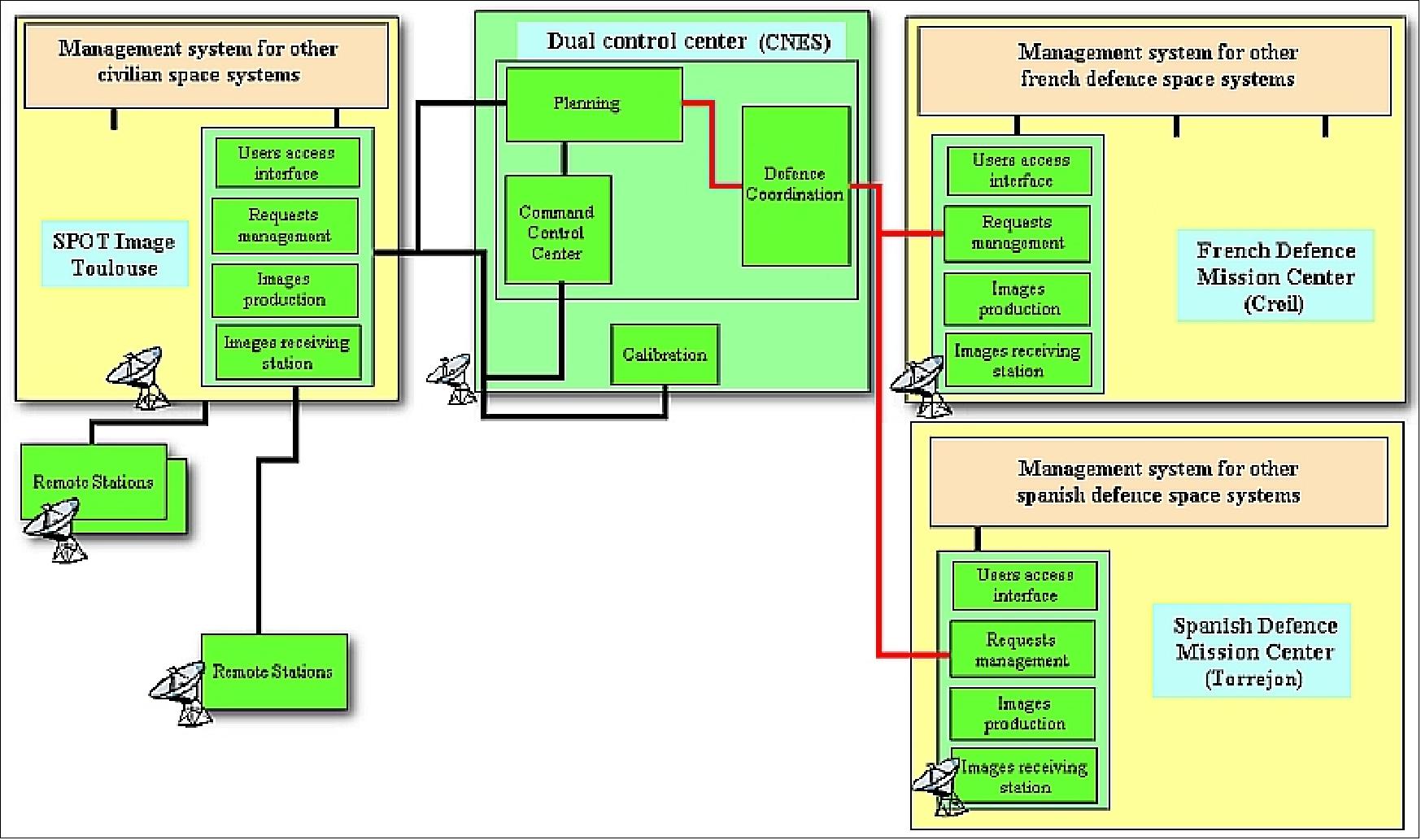
2) The French and Spanish Defence Mission Centers serve the defence users of each country. The basic functions of the Defence Mission Centers are similar to those of the civilian ground segment with some differences in the interfaces, and the security.
3) CNES hosts the dual control center (civil and military). The control center manages the following functions and service requests:
• Monitoring and control of the Pleiades spacecraft
• Hosting of the defence coordination function in support of an optimized work plan to the different partners, taking into account the priorities of each national work plan
• It realizes the planning of all the programmatic requests, by collecting and analyzing all the requests of the civilian and defence users
• It implements and oversees the periodic calibration function of the imaging instrument, for the benefit of all the users.
A very important operational criteria is the devivery of the data products for the commercial customers in record time. This speed represents a key element of the space and ground segment components, built to comply to the user requirements.
The ground segments were entrusted to CapGemini and CS-SI (programming system), Thales services (image system) and a consortium involving EADS Astrium, Cap Gemini, CS-SI and Thales services (integration of user centers), while INDRA has been given responsibility for the Spanish Defense mission center. The receiving stations have been developed by Zodiac.
HMA (Heterogeneous Mission Access) Implementation
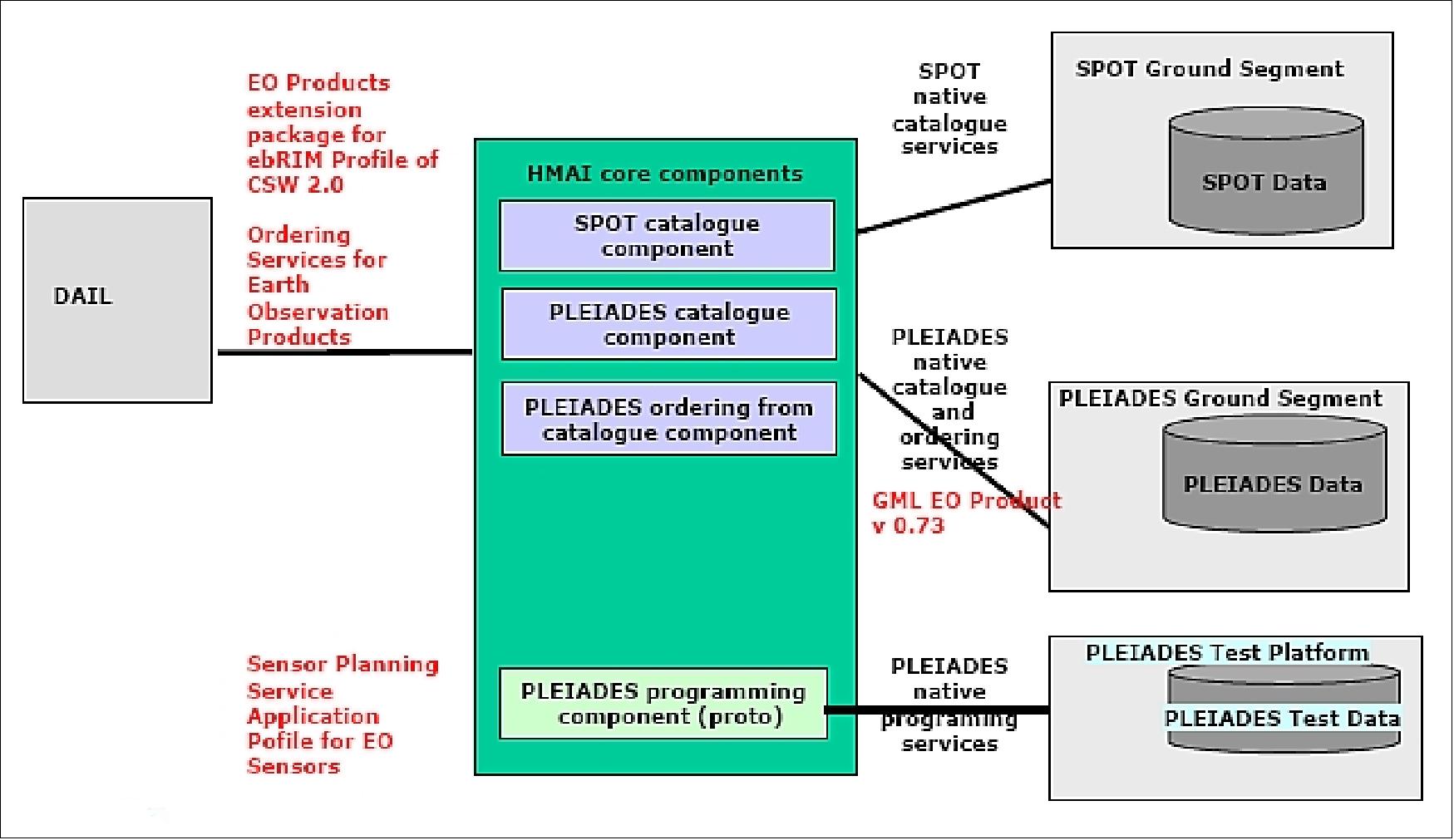
CNES is in the process to implement the HMA data services, a European initiative by the GSCB (Ground Segment Coordination Body), to the following projects of CNES: 91)
• Catalog Service: SPOT & Pleiades
• Ordering Service: Pleiades, SPOT (in planning)
• Programming Service: Pleiades prototype based, SPOT (in planning)
• Online Data Access Service (future): SPOT & Pleiades
The overall objective of HMA is to establish a harmonized access to heterogeneous EO (Earth Observation) missions’ data from multiple mission ground segments, including national missions and the Copernicus/Sentinel missions. HMA's goal is to standardize the ground segment interfaces of the satellite missions to enable easier access to EO data. HMA is managed by GMES (Global Monitoring for Environment and Security) - the European program for the implementation of information services to support decisions concerning environment and security.
The long-term HMA goal are rapid and reliable access to time-sensitive information is a significant strategic resource for any community. The EO interoperability benefits are linked to the following high-level objectives:
- Manage and reduce technical risks in EO systems and operations
- Manage and reduce cost of EO systems and operations
- Establish the baseline for the development of the European Space infrastructure capable of harmonizing and exploiting relevant national initiatives and assets
- Allow interoperability within and across organizations
- Increase competitiveness of European Space (and downstream) industries
- Maintain the leadership in EO systems and operations, and avoid the emergence of undesirable standards
- Ensure that technology drivers for the European Guaranteed Access to Space are lead by European requirements.
The HMA project focuses on defining and providing five interfaces:
1) Catalog Service: browsing and retrieving metadata on collections and products across collaborating HMA catalogs
2) Ordering Service: for products identified in a catalog
3) Programming Service: submitting requests for new acquisitions to the HMA partner missions’ ground segments
4) Mission Planning Service: facilitating preparation of programming requests
5) Online Data Access Services: retrieving products from the online access archives offered through the HMA.
The GMES program, an EU and EC initiative, with its multiple EO missions and data handling concepts by the various national entities within this program, implied no other way but to start the HMA initiative, a coordination effort of standard interfaces for the benefit of all parties involved (ESA, CNES, DLR, EUMETSAT, ASI, INTA, CSA, DMCii, etc.) including TPM (Third Party Missions) and of course the data user community. 92) 93) 94) 95)
• About 15 European Entities (+ their partners)
• More than 40 EO satellites
• More than 60 instruments — and related ground segments, operations, infrastructure
• Plus around 20 data policies.
Calibration Methods of the Pleiades Program
For an earth observing satellite with no on-board calibration source like Pleiades, the commissioning phase is a critical quest of well-characterized earth landscapes and ground patterns that have to be imaged by the camera in order to compute or fit the parameters of the viewing models. It may take a long time to get the required scenes with no cloud, whilst atmospheric corrections need simultaneous measurements that are not always possible. 96) 97)
Performance Assessment
Like other Earth observing space systems, Pleiades has been designed to meet its performance requirements throughout its lifetime. The performance compliance depends on a good knowledge of all parts of the system, from low-level equipment to global chains. This engineering knowledge is used to define useful physical models dedicated to image quality:
• The geometric model is used to compute the location on the Earth of any pixel. It takes into account a geometric modelization of the satellite: orbit determination, attitude estimation, datation, viewing frame determination, focal length adjustment, viewing directions of all detectors, and a ground reference frame.
• The radiometric model is used to convert raw digital counts to TOA (Top-of-Atmosphere) radiance and to normalize the inter-detector sensitivities. It is applied to the pushbroom acquisition principle, since each elementary detector has its own sensitivity to input radiance and its own dark current.
• The resolution model is used to master how details are filtered by the imaging chain, and involves a convolution model by the point-spread function. This model can be handled easily in the Fourier domain where the MTF (Modulation Transfer Function) plays a major role.
Some contributors cannot be modelled and must be minimized by design, like sensor noises. But many parameters can be modelled and calibrated, either during on-ground validation tests or during in-flight operations.
On-ground Calibration
Before launch, the satellite manufacturer runs many tests in order to check the behavior of all the satellite components, and to demonstrate that the requirements are fully compliant.
For example, the geometric model is built step by step by combining the different reference frames of the attitude control loop – including sensors and actuators - and the instrument line of sight model. In spite of very accurate measurement instruments like theodolites, this kind of model cannot reach the level of accuracy that is needed for the image location performance where one PAN pixel defines an angle of 1 µrad . That is why a frame correction is scheduled at system or satellite level, in order to compensate for all the uncertainties due to ground conditions or to launch.
Even if a ground sequence test can be considered accurate enough or very representative, the instrument behavior may change after the launch and throughout its lifetime on orbit: on-ground calibration has to be considered as the first characterization before launch.
For example, detectors non-uniformity can be measured in front of a integrating sphere during on-ground tests, and the camera best focus can be determined using a collimator on an optical facility, but both of these parameters are expected to vary slightly in orbit and therefore must be updated after launch.
Ground tests are also mandatory to check the right signs of all the signed data: for example, the right sign of the TDI line transfer is compared to the expected velocity of the scene due to the satellite motion.
In-flight Calibration
During the satellite development, the useful parameters of the three image quality models are identified and at least one dedicated calibration procedure has to be defined and validated before launch thanks to simulated images. A lot of experience has been gathered by CNES in the Earth observing systems domain and many calibration procedures rely on this basic principle: if one gets an image of a well-known reference pattern, then one is able to identify the unknown parameters of the model, which links the input scene to the output image.
In radiometric image quality, in-flight normalization and signal-to-noise ratio are classically performed thanks to uniform expanses of snow-covered scenes, absolute calibration is computed on reference photometric sites with a simultaneous atmosphere characterization, the MTF is measured on knife-edge ground patterns.
The geometric model parameters are estimated in two steps. First, the image location biases are tuned thanks to location sites on which many GCPs (Ground Control Points) are available. As these landmarks give the true location of the line of sight, a block adjustment of several images is performed to determine the alignment bias that minimize the location error. Then, the viewing directions of each detector are computed with several methods using inter-images correlation, either relatively between images given by different retinas, or absolutely between an image and a ground orthorectified reference equivalent to thousands of GCPs.
All these calibration methods are very demanding in dedicated images of specific sites, because they may need a lot of images to make an accurate least-square estimation possible, and because it is not easy to get cloud-free images over these sites. The project team can manage the resource sharing during the commissioning phase but the system unavailability during the operational mission must be strictly minimized. Looking for alternate methods that need less usage of ground references is therefore an issue of importance.
Looking from Different Points of View
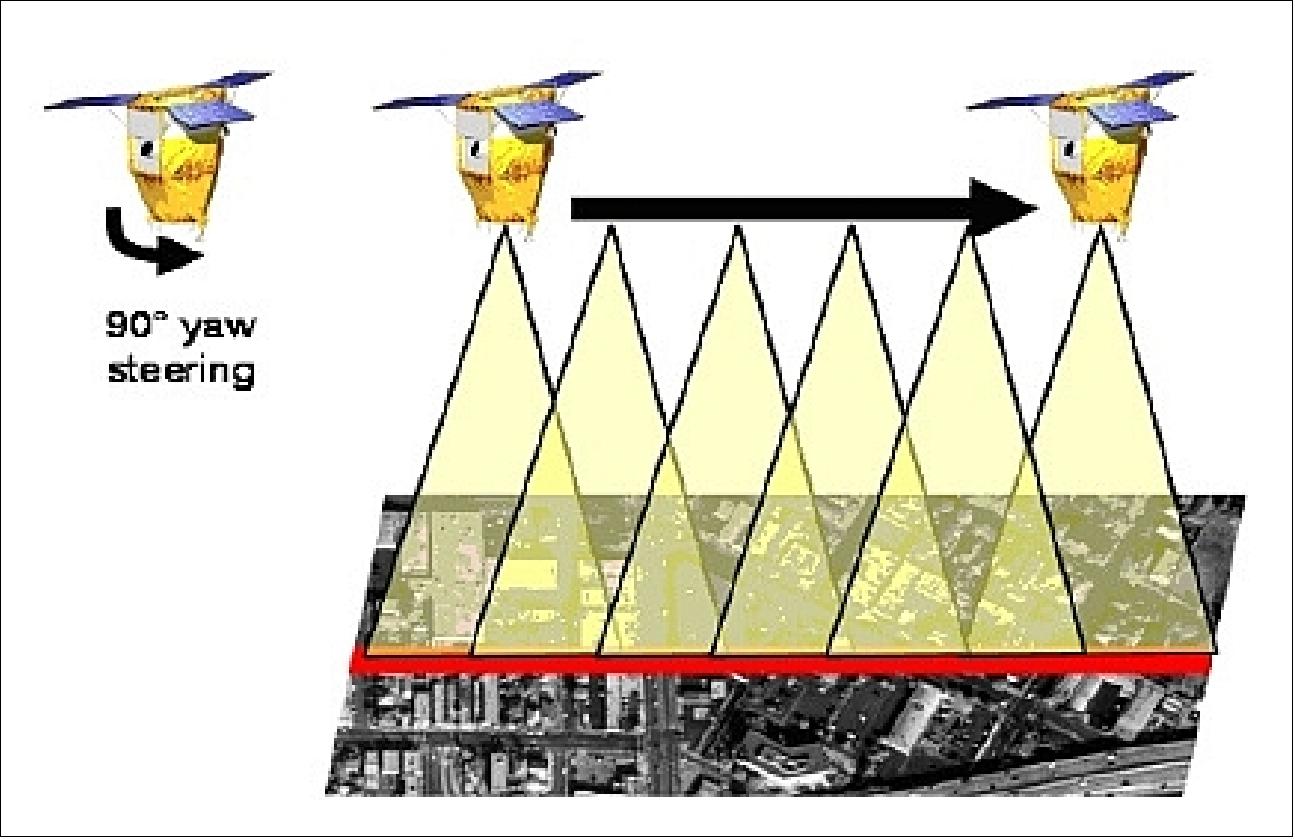
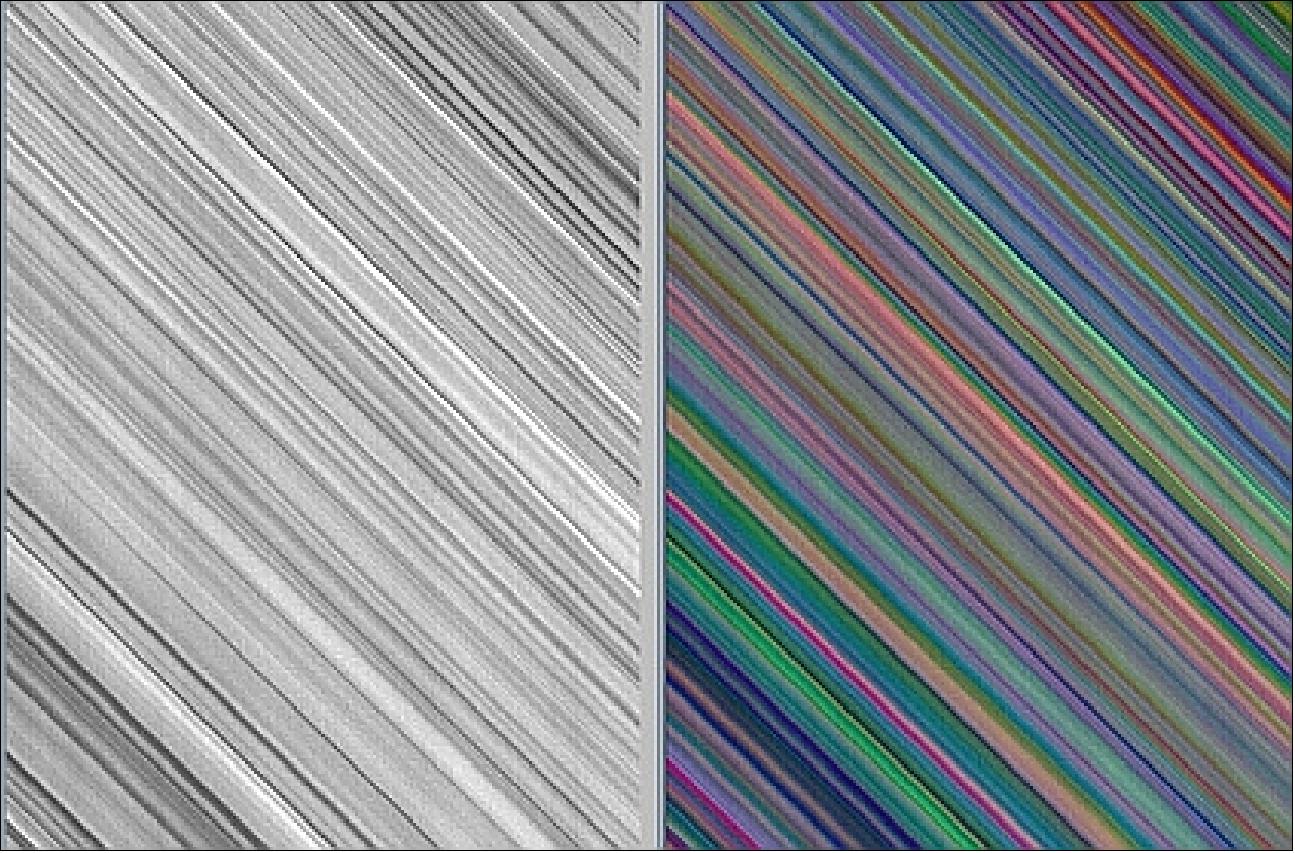
To reduce the in-flight operations, the so-called AMETHIST method has been processed for the first time to be able to compute the parameters of the radiometric model in case of non-linear behavior. An efficient way to bypass the quest of uniformity is to use the satellite agility in order to align the ground projection of the scan-line on the ground velocity. This weird viewing principle (Figure 39) allows all the detectors to view the same landscape. After a pre-processing, that globally shifts each column of the raw image, an image is obtained that contains all needed information. This means that every row contains the set of detector responses to the same landscape. Thus, non-linear normalization coefficients can be computed by a histogram matching method.
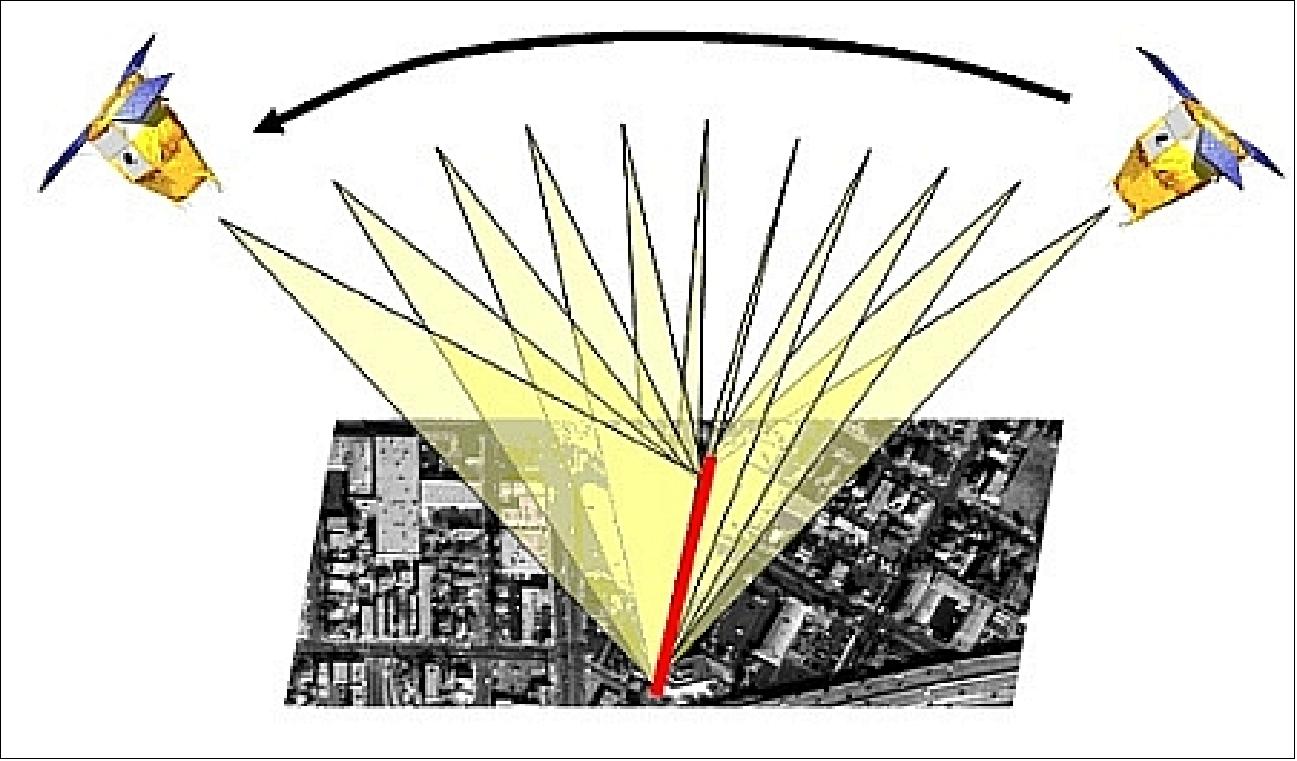
The Pleiades spacecraft is not only capable to be controlled at a specific 3D attitude, but also with a tunable rotation rate. This ability can be used to stop the scanline projection on the ground during the satellite overpass, so that each detector sees the same landscape during the image capture: this is called the steady-mode (Figure 40). This kind of image can be used to compute the SNR, and, combined with a single reference image in the same overpass, can deliver geometrical stability information.
Detector Normalization
Several AMETHIST calibration campaigns were performed during the commissioning phase, over a large collection of landscapes that mix Earth, ocean surfaces and clouds in order to get a large set of pixels at different radiance levels.
The AMETHIST calibration method gives the same magnitude of residuals as the direct method that compute normalization parameters on uniform snowy expanses, with far less operational constraints. Moreover, it allows a fine monitoring of the in-flight performance that can be compared to pre-flight expectations: up to now, the normalization monitoring confirms the need for an update of the parameters every 6 months, as expected on-ground.
Absolute Calibration
In addition to images of well-characterized landscapes that have been used for years and continuously improved thanks to previous satellites commissioning, the Pleiades project has been taken many images of the Moon since the launch. In a nominal calibration mode, the moon is observed once a month during the descending phase in order to follow the stability of the absolute calibration of the different spectral bands.
The Pleiades project has also regularly acquired imagery of stars since the launch. It is planned to follow the temporal evolution of the absolute calibration of the instrument with these well-known and stable sources without any access conflict of the mission.
Thanks to its total lack of atmosphere and the perfect stability of its surface and thus optical properties, the Moon constitutes an ideal calibration site for Earth observation missions for which the radiometric quality of the data is crucial. In the framework of the Pleiades- 1A and Pleiades-1B in-flight calibration, studies took place in order to determine the calibration precision that could be reached from the acquisitions realized during the different lunar cycles. The POLO data set (Pleiades Orbital Lunar Observations) was born: over 1000 images of the Moons acquired over 6 months for viewing angles varying from -115º to +115º (0º corresponding to the full Moon, 180º, to the new Moon). 98)
The commissioning phase of Pleiades-1A and Pleiades-1B represented the opportunity: 99)
• To acquire a unique dataset of Moon images with a very high spatial resolution (~300 m)
• More than 800 images of the Moon were acquired in only 6 months (guaranty of the stability of the instrument over this time slot)
• An intensive analysis was performed to determine the sensitivity of the method to the different parameters: precision better than 0.5%.
The short term objective is now to use this POLO data set to improve the ROLO (Robotic Lunar Observatory) lunar model, developed by USGS (United States Geological Survey) which is internationally accepted and used by every space agency for the calibration of satellite which are able to aim at the Moon. This new model should then be available to the international community through the CNES participation to the GSICS (Global Space-based Inter-Calibration System).
SNR (Signal-to Noise Ratio)
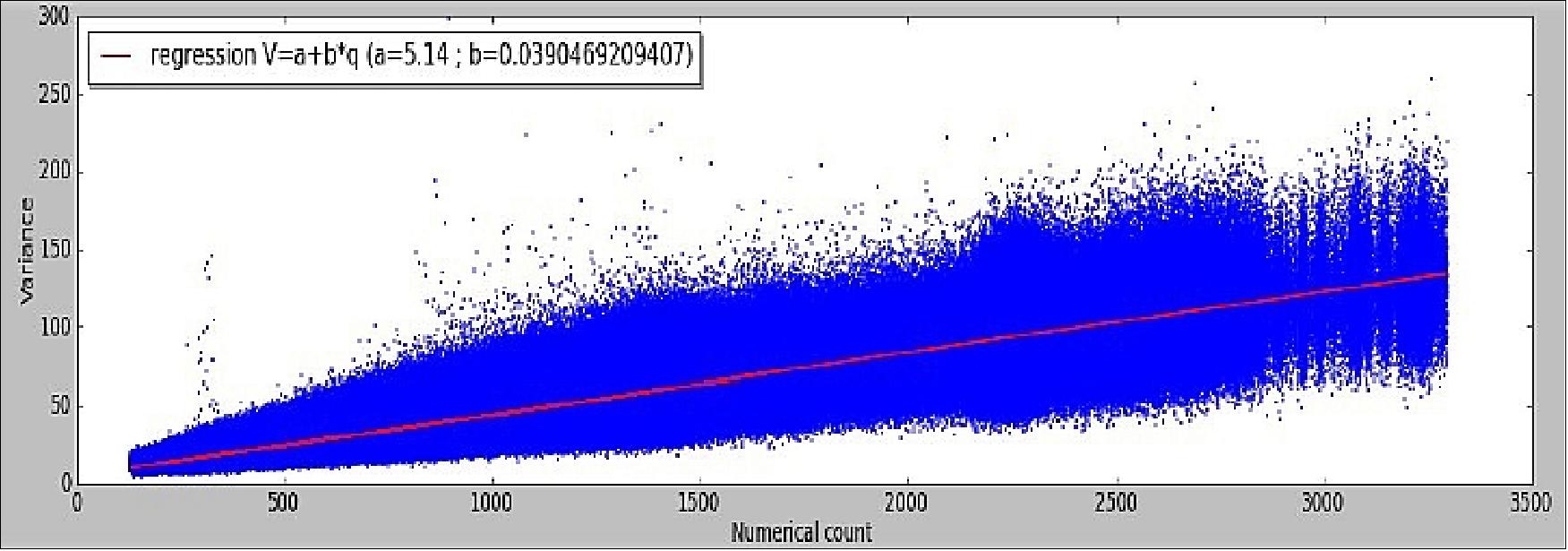
The radiometric noise behavior has been modelled for years: its variance is equal to an offset plus a linear function of the input radiance. The offset represents the variance of the noise in darkness and can be directly computed on darkness images. The linear part can be computed by different calibration techniques. One of them is the steady-mode, that provides a full set of couples (i.e., radiance mean, radiance standard deviation).
MTF (Modulation Transfer Function)
Three days after the launch, the Pleiades satellite MTF was computed thanks to images of stars in the Pleiades constellation, as a sign of destiny. MTF is the Fourier Transform of the point-spread function, but the actual images of stars undergo aliasing effects because of the sampling and the high level of MTF, especially in the XS bands. Therefore, a preprocessing is applied on a large number of stars to interlace each elementary response to produce a well sampled one. This method delivers a very accurate MTF in two dimensions, whereas previous methods were able to measure the MTF only along one axis.
In conclusion, the Pleiades technological breakthrough has given the opportunity to imagine new methods in a way that serve not only the calibration accuracy, but also the relaxation of operational constraints. These new calibration methods will reduce many time-consuming activities because they often provide a closer access to the final performance without external data. The Pleiades commissioning phase has been an unforgettable experience in engineering enthusiasm; hence, many new ideas and concepts turned into reality. It is time now to keep on looking ahead and up above in order to face the next challenge of high resolution optics — the design and the calibration process of the next generation cameras with embedded active optics control loops (Ref. 96).
References
1) “Proposal for an Earth Watch Wide Field / Superspectral Element,” ESA/PB-EO (2001) 59, Annex-1, May 16, 2001
2) L. Perret, E. Boussarie, J. M. Lachiver, P. Damilano, “The Pléiades System high resolution optical satellite and its performances,” Proceedings of the 53rd IAC/World Space Congress, 2002, Oct. 10-19, 2002, Houston,TX, IAC-02-B.2.06
3) A. Baudoin, “Beyond SPOT 5: Pleiades, Part of French-Italian Program ORFEO,” Proceedings of ISPRS 2004, Istanbul, Turkey, July 12-23, 2004
4) http://smsc.cnes.fr/PLEIADES/index.htm
5) A. Baudoin, E. Boussarie, P. Damilano, G. Rum, F. Caltagirone, “Pléiades : a Multi Mission and Multi Cooperative Program,” 52nd International Astronautical Congress (IAC), Oct. 1-5, 2001, Toulouse, France, IAF-01-B.1.07
6) M. Arnaud, B. Boissin, L. Perret, E. Boussarie, A. Gleyzes, “The Pleiades Optical High Resolution Program,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B1.1..04
7) M. Alain Gleyzes, Lionel Perret, Philippe Kubik, “Pleiades System Architecture and main Performance s,” Proceedings of the 22nd Congress of ISPRS (International Society of Photogrammetry and Remote Sensing), Melbourne, Australia, Aug. 25 - Sept. 1, 2012, Special Session: ISPRS and IAA: Pléiades System and Acquisition Capability, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXIX-B1, 2012
8) “Pléiades to succeed SPOT,” CNES Magazine No 9, June 2000, p. 8
9) A. Baudoin, “The Current and Future SPOT Program,” Proceedings of the ISPRS Joint Workshop `Sensors and Mapping from Space 1999,' Sept. 27-30, 1999, Hannover, Germany
10) “Earth Watch Program: COSMO-SkyMed Element,” ESA/PB-EO (2001) 55, May 18, 2001, with Annex: Draft Italian Earth Watch Program Proposal - ESA participation to COSMO-SkyMed Mission (Radar Component)
11) http://smsc.cnes.fr/PLEIADES/A_prog_accomp.htm
12) Claire Tinel, Alain Gleyzes, Delphine Fontannaz, Benoit Boissin, Hélène de Boissezon, “Pleiades Users Thematic Commissioning : Earth Observation applications from optical constellation,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.5.7
13) Y. Combet, E. Rapp, J. Augier, F. Rizzi, “Pleiades HR Solar Array, Fair European Sharing Corporation,” Proceedings of the 7th European Space Power Conference, Stresa, Italy, May 9-13, 2005, ESA SP-589
14) L. Blarre, J. Ouakine, L. Oddos-Marcel, P. E. Martinez, “High accuracy Sodern Star Trackers: Recent improvements proposed on SED36 and HYDRA Star Trackers,” AIAA Guidance, Navigation, and Control Conference and Exhibit, Aug. 21-24, 2006, Keystone, CO, USA, AIAA 2006-6046
15) Note: 200 m pointing accuracy refers to “a priori accuracy.” It means that when trying to acquire a target, one must take a 200 m margin in order to be sure to include it. On the other hand, the term “location accuracy” addresses the knowledge (after the data take) of the image position accuracy. The latter information is enhanced data, compared to the “a priori” one, because it contains the computed Star Tracker data.
16) A. Defendini, J. Morand, P. Faucheux, P. Guay, C. Rabejac, K. Bangert, H. Heimerl, “Control Moment Gyroscope (CMG) Solutions for Small Satellites,” Proceedings of the 28th Annual AAS Rocky Mountain Guidance and Control Conference, Breckenridge, CO, USA, Feb. 5-9, 2005, AAS 05-004
17) P. Damilano, Pléiades High Resolution Satellite: a Solution for Military and Civilian Needs in Metric-Class Optical Observation,” AIAA/USU Conference on Small Satellites, Aug. 13-16, 2001, SSC01-I-5
18) A. Defendini, P. Faucheux, P. Guay, J. Morand, H. Heimerl, “A Compact CMG product for agile satellites,” 5th International ESA Conference on Guidance Navigation and Control Systems, Frascati, Italy, Oct. 22-25, 2002
19) P. Faucheux, P. Guay, A. Defendini, H. Heimel, M. Privat, R. Seiler, “Control Moment Gyros CMG 15-45S: a compact CMG product for agile satellites in the one ton class,” 10th European Space Mechanisms and Tribology Symposium, San Sebastián, Spain, Sept. 24-26, 2003
20) http://smsc.cnes.fr/PLEIADES/lien2_sat.htm
21) https://web.archive.org/web/20151127094841/http://www.arianespace.com:80/launch-services-soyuz/soyuz-introduction.asp
22) Soyuz User's Manual, Issue 2, Revision 0, March 2012, URL: https://web.archive.org/web/20150923173754/http://www.arianespace.com/launch-services-soyuz/Soyuz-Users-Manual-March-2012.pdf
23) Clayton Mowry, Serge Chartoire, “Experience Launching SmallSats with Soyuz & Vega from the Guiana Space Center,” Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-V-9, URL: http://digitalcommons.usu.edu/smallsat/2013/all2013/82
24) “Pleiades and ELISA satellites successfully launched,” CNES, Dec. 17, 2011, URL: http://www.cnes.fr/web/CNES-en/9872-gp-pleiades-and-elisa-satellites-successfully-launched.php
25) “Arianespace Completes 2011 Launch Manifest With Successful Soyuz Campaign,” Space Travel, Dec. 17. 2011, URL: http://www.space-travel.com/reports/
Arianespace_Completes_2011_Launch_Manifest_With_Successful_Soyuz_Campaign_999.html
26) “Soyuz delivers from the Spaceport! Arianespace's medium-lift launcher orbits Pléiades 1B,” ArianeSapce, Dec. 02, 2012, URL: https://web.archive.org/web/20150907015339/http://www.arianespace.com/news-mission-update/2012/VS04-success.asp
27) “Arianespace Lofts Pleiades 1B Using Soyuz Medium-lift launcher,” Space Travel, Dec. 02, 2012, URL: http://www.space-travel.com/reports/
Arianespace_Lofts_Pleiades_1B_Using_Soyuz_Medium_lift_launcher_999.html
28) http://smsc.cnes.fr/PLEIADES/GP_systeme.htm#orbite
29) Frank Döngi, “Earth Observation from Space, The European Landscape in the Second Decade,” SPIE Remote Sensing, Sept. 19-22, 2011, Prague, Czech Republic, URL: http://spie.org/Documents/AboutSPIE/PDF/ERS11-plenary-Doengi.pdf
30)< a href="#BKhYV175Herb"> ”New strategic sites monitoring solution developed by Airbus and Earthcube,” Airbus Press Release, 8 October 2020, URL: https://web.archive.org/web/20211016152037/https://www.airbus.com/newsroom/press-releases/en/2020/10/new-strategic-sites-monitoring-solution-developed-by-airbus-and-earthcube.html
31) ”Airbus extends its reach into precision agriculture solutions with AgNeo,” Airbus DS Press Release, 6 March 2020, URL: https://www.intelligence-airbusds.com/files/pmedia
/public/r61585_9_uk-airbus-ad-press-release-agneo-launch.pdf
32) ”Airbus announces new and expanded capabilities for OceanFinder Near-real time vessel identification and route prediction,” Airbus Press Release, 18 September 2019, URL: https://www.intelligence-airbusds.com/files/pmedia/public/r55167_9_airbus-ds-press-release-oceanfinder-2.pdf
33) ”Airbus to provide near real-time access to its satellite data,” Airbus Press Release, 30 Jan. 2018: URL: http://www.airbus.com/content/dam/corporate-topics
/publications/press-release/Press%20Release%20CIS%2030012018%20ENG.pdf
34) Pléiades image - Fort Bourtange, Netherlands, URL: https://intelligence.airbus.com/newsroom/satellite-image-gallery/?img=42206
35) ”Caravan on ice,” ESA, image of the week, Jan. 9. 2017, URL: http://m.esa.int/spaceinimages/Images/2017/01/Caravan_on_ice
36) ”Airbus Defence and Space Celebrates Five Years of the First Pleiades Satellite Launch,” Airbus DS News, Dec. 19, 2016, URL: https://airbusdefenceandspace.com/newsroom
/news-and-features/airbus-defence-and-space-celebrates-five-years-of-the-first-pleiades-satellite-launch/
37) Gilles Codou, Eliane Cubero-Castan, Thierry Duverger, Roselyne Mesnard, Frédéric Tavera, Cyril Casserra,”Operational scheduling of Direct Tasking innovative concept to improve reactivity on earth observation system,” Proceedings of the 14th International Conference on Space Operations (SpaceOps 2016), Daejeon, Korea, May 16-20, 2016, paper: AIAA 2016 2357, URL: http://arc.aiaa.org/doi/pdf/10.2514/6.2016-2357
38) https://airbusdefenceandspace.com/
39) Thales Alenia Space prepares the successor to Pleiades and CSO ,” TAS, Sept. 14, 2015, URL: https://www.thalesgroup.com/en/worldwide-spain/press-release
/thales-alenia-space-prepares-successor-pleiades-and-cso
40) ”Feasibility study contract signed with CNES to prepare future very high-resolution satellites,” Airbus DS, Sept. 11, 2015, URL: http://www.space-airbusds.com/en/press_centre/
airbus-defence-and-space-prepares-the-future-of-earth-observation-from-space.html
41) ”Pléiades Satellite Image – Moscow, Russia,” Airbus DS, URL: [web source no longer available]
42) “SPOT and Pleiades data available for research and application development,” ESA, April 10, 2015, URL: https://web.archive.org/web/20210509113625/https://earth.esa.int/web/guest/missions/3rd-party-missions/current-missions/spot/news/-/article/spot-and-pleiades-data-available-for-research-and-application-development
43) “Third Party Missions,” ESA, URL: http://tinyurl.com/kjururl
44) “Eruption of a volcano in the Tonga archipelago -Pleiades captures the birth of a new island,” Airbus DS, Jan. 19, 2015, URL: https://web.archive.org/web/20160428183602/http://www.geo-airbusds.com/en/6322-eruption-of-a-volcano-in-the-tonga-archipelago-pleiades-captures-the-birth-of-a-new-island
45) “Pléiades: When Accuracy and Detail Becomes Time-Critical,” Airbus Defence and Space, April 2014, URL: http://www.astrium-geo.com/en/5676-pleiades-for-defence
46) Marc Pircher, “Pleiades Days - Conclusion,” Toulouse, France, April 1-3, 2014, URL: http://espace-ftp.cborg.info/pleiades_days/presentations2014/05-Pleiades_days_2014_CNES_conclusion_Pircher.pdf
47) Alain Gleyzes, “Results on capacity/performances of the constellation and image quality,” Pleiades Days, Toulouse, France, April 1-3, 2014, URL: http://espace-ftp.cborg.info
/pleiades_days/presentations2014/02-Results_and_QI_Gleyzes.pdf
48) “Pleiades Days Presentation,” Toulouse, France, April 1-3, 2014, URL: https://web.archive.org/web/20160417080308/www.pleiades2014.com/presentations-2014/
49) Laurent Maggiori, “Living Pléiades : Sharing experiences on the operational use of the system,” Pleiades Days, Toulouse, France, April 1-3, 2014, URL: http://espace-ftp.cborg.info
/pleiades_days/presentations2014/03-Living_Pleiades_Maggiori.pdf
50) Information provided by Alain Lapeyre of CNES, Chef de Service Exploitation des Satellites de Télédétection.
51) Brian Cutler, “Pleiades 1B and SPOT 6 Image Quality status after commissioning and 1st year in orbit,” Proceedings of JACIE 2014 (Joint Agency Commercial Imagery Evaluation) Workshop, Louisville, Kentucky, USA, March 26-28, 2014, URL: https://calval.cr.usgs.gov/wordpress/wp-content
/uploads/14.025_Cutler_JACIE2014-Airbus-Constellation-PHR1BSPOT6.pdf
52) Alain Gleyzes, Lionel Perret, “Pleiades High resolution optical Earth Observation system status and future missions preparation in the frame of CXCI (Technology demonstration of very high resolution imaging) CNES program,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B1.2.2
53) M. Benoit Boissin, Alain Gleyzes, Claire Tinel, “The Pleiades system and data distribution,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
54) Amit Kumar, “Pleiades Captures Massive Salvage Operation of Costa Concordia,” Sept. 19, 2013, URL: http://www.satpalda.com/pleiades-captures-massive-salvage-operation-of-costa-concordia/
55) “The Costa Concordia salvage operation by satellite,” Sept. 18, 2013, URL: https://web.archive.org/web/20140131034741/http://www.enjoyspace.com:80/en/news/the-costa-concordia-salvage-operation-by-satellite
56) “Pleiades Constellation Complete,” Astrium, March 2013, URL: http://www.astrium-geo.com
/na/4693-pleiades-constellation
57) “Astrium: operational and commercial launch of the fully complete Pléiades constellation,” Astrium, March 19, 2013, URL: [web source no longer available]
58) Drew Hopwood, “Pleiades-1A and -1B, SPOT-6 & -7 — Status of Astrium GEO-Information Services’ EO Satellite Constellation,” 12th Annual JACIE (Joint Agency Commercial Imagery Evaluation) Workshop, St. Louis, MO, USA, April 16-18, 2013, URL: https://calval.cr.usgs.gov/
wordpress/wp-content/uploads/Astrium-Constellation-Status.pdf
59) “GMES Space Component Data Access Portfolio: Data Warehouse 2011-2014,” GSC data access, ESA/ESRIN, Dec. 15, 2012, URL: [web source no longer available]
60) “Pleiades 1A available to GMES users,” ESA, Feb. 22, 2013, URL: https://web.archive.org/web/20141218225403/gmesdata.esa.int/web/gsc/news/latest_20130222
61) http://www.astrium-geo.com/na/1192-image-gallery?search=gallery&sensor=1660
62) Laurent Lebegue, Daniel Greslou, Gwendoline Blanchet, Francoise Delussy, Sebastien Fourest, Vincent Martin, Christophe Latry, Philippe Kubik, Jean-Marc Delvit, Cecile Dechoz, Virginie Amberg, “Pleiades satellites image quality in-orbit calibration and assessment,” JACIE (Joint Agency Commercial Imagery Evaluation)Workshop , Tampa, FL, USA, May 4-8, 2015, URL: https://calval.cr.usgs.gov
/wordpress/wp-content/uploads/Planches-JACIE-2015-lebeguel.pdf
63) “Successful launch of Pleiades-1B,” CNES, Dec. 02,2012, URL: http://smsc.cnes.fr/PLEIADES/GP_actualite.htm
64) http://misconceive/PLEIADES/GP_actuality's
65) Jean-Michel Achiever, “Pleiades: operational programming first results,” Proceedings of SpaceOps 2012, The 12th International Conference on Space Operations, Stockholm, Sweden, June 11-15, 2012, URL: http://www.spaceops2012.org/proceedings/documents/id1275526-Paper-001.pdf
66) Laurent Lebègue, Daniel Greslou, Françoise de Lussy, Sébastien Fourest, Gwendoline Blanchet, Christophe Latry, Sophie Lachérade, Jean-Marc Delvit, Philippe Kubik, Cécile Déchoz, Virginie Amberg, Florence Porez-Nadal, “Pleiades-HR Image Quality Commissioning,” Proceedings of the 22nd Congress of ISPRS (International Society of Photogrammetry and Remote Sensing), Melbourne, Australia, Aug. 25 - Sept. 1, 2012, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XXXIX-B1, 2012, URL: http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XXXIX-B1/561/2012/isprsarchives-XXXIX-B1-561-2012.pdf
67) Information provided by Benoit Boissin of CNES, Toulouse, France
68) Peter B. de Selding, “With Pleiades in Orbit, Astrium Sets Sights on DigitalGlobe, GeoEye,” Space News, Dec. 19, 2011, URL: http://www.spacenews.com
/earth_observation/111219-astrium-sights-digitalglobe-geoeye.html
69) Drew Hopwood, “Post Launch Commissioning and Testing of Pleiades 1,” Astrium GEO-Information Services, April 2012, URL: http://calval.cr.usgs.gov/wordpress
/wp-content/uploads/Hopwood_JACIE_2012-Pleiades.pdf
70) URL: https://web.archive.org/web/20121113080036/www.pleiades2012.com/?page_id=209
71) “First Pleiades 1A Imagery,” Astrium GEO-Information Services, Dec. 22, 2011, URL: http://www.astrium-geo.com/en/2926-first-pleiades-1a-imagery
72) “Astrium GEO Information Services LTDP Experience and Approach,” 2nd Long Term Data Preservation Workshop, ESA/ESRIN, May 30-31, 2011, URL: http://earth.esa.int
/gscb/ltdp/presentations/28.Astrium-Geo-Session3-LTDP-Workshop.pdf
73) “Airbus Group Takes Off Into 2014 With Joint Brand,” Airbus Group, January 2, 2014, URL: http://www.airbus-group.com/airbusgroup/int/en/news/press.20140102_airbusgroup_new_brand.html
74) “Enhancing Competitiveness – EADS Outlines Plan for Defence and Space Restructuring,” EADS, Dec. 9, 2013, URL: http://www.eads.com/eads/int/en/news/press.20131209_eads_enhancing_competitiveness.html
75) Catherine Gaudin-Delrieu, Jean-Luc Lamard, Philippe Cheroutre, Bruno Bailly, Pierre Dhuicq, Oliver Puig, “The High Resolution Optical Instruments for the Pleiades Earth Observation Satellites,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
76) J.-L. Lamard, C. Gaudin-Delrieu, D. Valentini, C. Renard, T. Tournier, J.-M. Laherrere, “Design of the High Resolution Optical Instrument for the Pleiades HR Earth Observation Satellites,” Proceedings of 5th International Conference on Space Optics,” March 30 - Apr. 2, 2004, Toulouse, France
77) J.-L. Lamard, L. Frecon, B. Bailly C. Gaudin-Delrieu, P. Kubik, J.-M. Laherrere, “The High Resolution Optical Instruments for the Pleiades HR Earth Observation Satellites,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08- B1.3.5
78) Hélène Ducollet, Christian du Jeu, Jean-Jacques Fermé, “Manufacturing & Control of the Aspherical Mirrors for the Telescope of the Satellite Pleiades,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
79) Vincent Costes, Guillaume Cassar, Laurent Escarrat, “Optical design of a compact telescope for the next generation Earth Observation system,” Proceedings of the ICSOS (International Conference on Space Optical Systems and Application) 2012, Ajaccio, Corsica, France, October 9-12, 2012, URL of paper, : http://congrex.nl/icso/2012/papers/FP_ICSO-125.pdf , URL of presentation: http://congrex.nl/icso/2012/presentations/125_Costes.pdf
80) P. Pranyies, D. Deswarte, I. Toubhans, R. Le Goff, “SiC focal plane assembly for the Pleiades HR Satellite,” Proceedings of SPIE , 'Sensors, Systems, and Next-Generation Satellites VIII,' Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, Editors, Vol. 5570, November 2004, pp. 568-576
81) “Pleiades focal plane technology breakthroughs,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
82) Bruno Cugny, Benoit Boissin, “CNES Developments in Space Optics,” Proceedings of the ICSOS (International Conference on Space Optical Systems and Application) 2012, Ajaccio, Corsica, France, October 9-12, 2012, URL: http://congrex.nl/icso/2012/presentations/ICSO2012_presentation_v2.pdf
83) D. Dantes, J.-M. Biffi, C. Neveu, C. Renard, “SEDHI: Development Status of the Pleiades Detection Electronics,” Proceedings of 5th International Conference on Space Optics,” March 30 - Apr. 2, 2004, Toulouse, France
84) Christophe Renard, Didier Dantes, Claude Neveu, Jean-Luc Lamard, Matthieu Oudinot, Alex Materne, “From SED HI Concept to Pleiades FM Detection Unit Measurements,” Proceedings of the 7th ICSO (International Conference on Space Optics) 2008, Toulouse, France, Oct. 14-17, 2008
85) http://smsc.cnes.fr/PLEIADES/GP_systeme.htm
86) http://smsc.cnes.fr/PLEIADES/GP_segment_sol.htm
87) S. Baillarin, J. Gasperl, C. Dabin, C. Panem, B. Chausserie-Lapree, J.-P- Gleyzes, P. Kubik, C. Lathry, P. Floissac, E. Hillairet, “Remote Sensing Image Ground Segment Interoperability: PLEIADES-HR case study,” Proceedings of IGARSS 2006 and 27th Canadian Symposium on Remote Sensing, Denver CO, USA, July 31-Aug. 4, 2006
88) Simon Baillarin, Laurent Lebegue, Philippe Kubik, “Pleiades-HR System Qualification: A Focus on Ground Processing and Image Products Performances, a few months before launch,” Proceedings of IGARSS 2009 (IEEE International Geoscience & Remote Sensing Symposium), Cape Town, South Africa, July 12-17, 2009
89) A. Gleyzes, “Ground segment and products,” ORFEO Seminar, Paris, Aril 2, 2003, URL: http://smsc.cnes.fr/PLEIADES/Fr/PDF/seminaire_PHR_GS.pdf
90) C. Panem, F. Bignalet-Cazalet , S. Baillarin, “Pleiades-HR System Products Performance after in-orbit Commissioning Phase,” Proceedings of the 22nd Congress of ISPRS (International Society of Photogrammetry and Remote Sensing), Melbourne, Australia, Aug. 25 - Sept. 1, 2012, URL: http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XXXIX-B1/567/2012/isprsarchives-XXXIX-B1-567-2012.pdf
91) C. Dabin, D. Giacobbo, A. Meygret, “Ground Segment Interoperability in the GSCB Missions, Pleiades & SPOT,” GSCB Workshop, June 18-19, 2009, ESA/ESRIN Frascati, Italy, URL: http://www.congrex.nl/08c33/papers/3.5_Dabin.pdf
92) M. Eugenia Forcada, H. Laur, B. Hoersch, J. Martin, P. Goryl, G. Ottavianelli, G. Buscemi, S. Badessi, “ESA Missions and Sentinels ground segment interoperability,” GSCB Workshop, June 18-19, 2009, ESA/ESRIN Frascati, Italy, URL: http://www.congrex.nl/08c33/papers/3.1_Forcada.pdf
93) “Ground Segment Coordination Body (GSCB),” 2nd Plenary Workshop 2009, June 18-19, 2009, ESA/ESRIN Frascati, Italy, URL: http://www.congrex.nl/08c33/papers/0.2_Kohlhammer.pdf
94) Jolyon Martin, R. Smillie, “DAIL Implementation,” 2nd Plenary Workshop 2009, June 18-19, 2009, ESA/ESRIN Frascati, Italy, URL: http://www.congrex.nl/08c33/papers/1.2_Martin.pdf
95) P. G. Marchetti, Y. Coene, “HMA Standardisation Status,” 2nd Plenary Workshop 2009, June 18-19, 2009, ESA/ESRIN Frascati, Italy, URL: http://www.congrex.nl/08c33/papers/1.3_Marchetti.pdf
96) Philippe Kubik, Laurent Lebègue, Sébastien Fourest, Jean-Marc Delvit, Françoise de Lussy, Daniel Greslou, Gwendoline Blanchet, “First in-flight results of Pleiades-1A innovative methods for optical calibration,” Proceedings of the ICSO (International Conference on Space Optics), Ajaccio, Corsica, France, Oct. 9-12, 2012, URL: http://congrex.nl/icso/2012/papers/FP_ICSO-124.pdf
97) Gwendoline Blanchet, Laurent Lebègue, Sébastien Fourest, Christophe Latry, Florence Porez-Nadal, Sophie Lacherade, Carole Thiebaut, “Pleiades-HR Innovative Techniques for Radiometric Image Quality Commissioning,” Proceedings of the 22nd Congress of ISPRS (International Society of Photogrammetry and Remote Sensing), Melbourne, Australia, Aug. 25 - Sept. 1, 2012, URL: http://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XXXIX-B1/513/2012/isprsarchives-XXXIX-B1-513-2012.pdf
98) “Pleiades: towards a new radiometric model of the Moon?,” CNES, Nov. 2013, URL: http://smsc.cnes.fr/PLEIADES/GP_actualite.htm
99) Sophie Lachérade, Ouahid Aznay, Bertrand Fougnie, “POLO (Pleiades Orbital Lunar Observations) - Intensive Study of the Moon and Comparison to ROLO Mode,” 22nd CALCON Technical Conference, August 2013, Logan, UT, USA, URL: http://smsc.cnes.fr/PLEIADES/Fr/PDF/presentation_pleiades.pdf