Polar Scout
EO
Operational (nominal)
USCG
Quick facts
Overview
| Mission type | EO |
| Agency | USCG |
| Mission status | Operational (nominal) |
| Launch date | 03 Dec 2018 |
| CEOS EO Handbook | See Polar Scout summary |
Polar Scout Mission
Spacecraft Launch Mission Status References
Overview
Polar Scout is a DHS(Department of Homeland Security) Science and Technology Directorate (S&T) demonstration to evaluate technologies which could be leveraged to support the detection and reporting of search and rescue beacons in arctic regions. Given the harsh and remote aspects of the arctic regions, the timeliness for detecting and reporting search and rescue needs to rescue forces is more critical than other regions. The U.S. Coast Guard (USCG) is responsible for ensuring safe, secure, and environmentally responsible maritime activity in U.S. Arctic waters. The vast distances, lack of infrastructure, and harsh weather combine to make operations in the Arctic very difficult. S&T is partnering with USCG to evaluate the effectiveness of spaceborne sensors to improve operations in the Arctic. 1)
Potential Coast Guard uses for satellites include improving communication in the Arctic environment, monitoring large areas for illegal activity, and helping to locate persons in distress at sea. Additionally, the use of satellites has the potential to reduce the time and resources spent on intensive aircraft searches as well as the risks associated with placing personnel in hazardous situations that only need sensors and communications on scene. 2)
The Polar Scout Project started in June 2016 as a jointly funded partnership between the Coast Guard and DHS Science and Technology Directorate. Its purpose is to gain information on how government-owned space-based capabilities can be employed to solve communication and maritime domain awareness issues, especially in the polar regions. Retreating ice has increased vessel and aircraft traffic in the Arctic, making Coast Guard missions in the area more challenging and complex, and making reliable distress communications increasingly important.
The program has completed the acquisition and installation of two Mobile CubeSat Command and Control (MC3) ground stations: at the University of Alaska, Fairbanks, and the U.S. Coast Guard Academy in New London, Connecticut. The bulk of the investment has gone toward fabrication and integration of two 6U CubeSats, dubbed Yukon and Kodiak, which are designed to detect 406 MHz emergency distress beacons. DHS managed the procurement of the manifest and launch of Yukon and Kodiak.
The Coast Guard Research and Development Center (RDC) installed the two MC3 ground stations that will receive the CubeSat signals during testing and demonstrations. The RDC has also funded the Department of Energy's Lawrence Livermore National Laboratory to develop a Space Mission Architecture Design and Assessment. This assessment includes an evaluation of all potential sensors and payload combinations that could help the Coast Guard accomplish its missions.
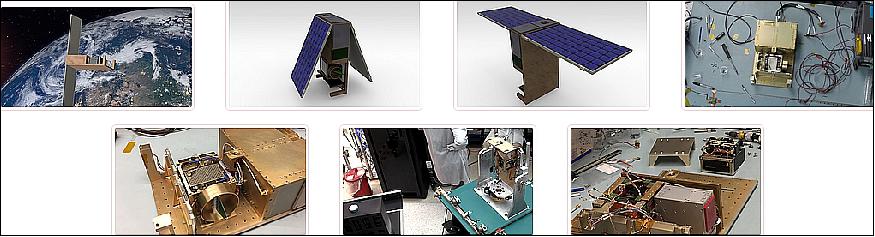
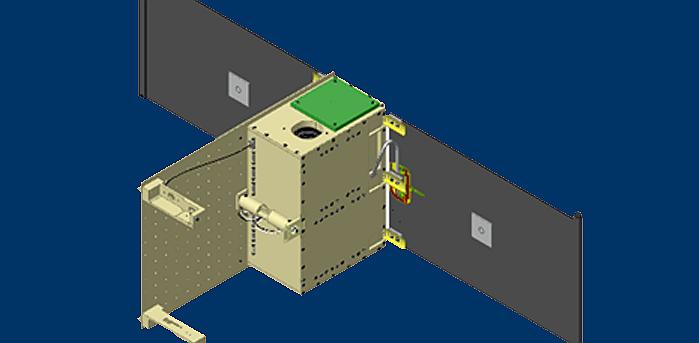
Spacecraft
The Polar Scout mission of the USCG is also referred to as ORS-7 (Operationally Responsive Space 7) mission that was built by the contractors, Raytheon, Millennium Engineering and Integration, and by Space Dynamics Laboratories. 3)
• Polar Scout-A (ORS-7, Polar Scout 1, Kodiak)
• Polar Scout-B (ORS-7, Polar Scout 2, Yukon)
Launch
On December 3, 2018 the Spaceflight SSO-A rideshare mission launched from Vandenberg Air Force Base, provided on a SpaceX Falcon-9 v1.2 (Block 5) rocket. This launch carried with it 64 payloads; the largest rideshare mission to launch from within the United States to date. Among those 64 satellites were two tech demo CubeSats being flown for the Department of Homeland Security Science and Technology Directorate (DHS S&T) in support of the United States Coast Guard (USCG) as part of the Polar Scout mission. 4)
Orbit: Sun-synchronous circular orbit with an altitude of 575 km, inclination of ~98º, LTDN (Local Time of Descending Node) of 10:30 hours.

Jim Knight, the Coast Guard deputy assistant commandant for acquisition, said in ceremonies leading up to the launch, "The Polar Scout project presents an opportunity to evaluate the most efficient way to ensure that the United States can project surface presence in the Arctic when and where it is needed while filling an immediate Search and Rescue capability gap in these remote areas."
Mission Status
Polar Scout Mission Overview
• August 2019: The Polar Scout mission consists of two identical 6U CubeSats, designated Kodiak and Yukon. The mission objective of these satellites is to demonstrate the ability to detect and geolocate EPIRB (Emergency Position Indicating Radio Beacon) transmissions over arctic waters. As boat traffic increases in the warming arctic, the USCG has an increased need to have timely and accurate detection of these beacons in order to provide swift emergency assistance. EPIRB monitoring is currently performed by the aging COSPAS-SARSAT program. The future MEOSAR (Medium Earth Orbit Search and Rescue) service program will provide operational capabilities for the USCG with full Arctic coverage, but is five to ten years from coming online. The Polar Scout mission is a technology demonstration to determine the CubeSat's usage as a gap-filler. 6)
Many parts of this mission are firsts. This mission flew a new bus and payload design. Polar Scout was the first S-band user of the Mobile CubeSat Command & Control (MC3) ground network employing the Satellite Agile Transmit and Receive Network (SATRN) software, and these satellites represent the first space-based mission directly supporting DHS. Like many CubeSats, these firsts create an increased overall risk to the program, which then drove the need for additional mission assurance. One of the manifestations of this mission assurance was the requisite to make contact with the satellites as soon as possible after launch in order to circumvent any initial anomalies (e.g. non-deployed solar arrays, etc.).
Polar Scout Ground Network
Polar Scout used the MC3 ground Network. 7) The MC3 network includes the S-Band 3m dish sites at Naval Postgraduate School (NPS) in Monterey, CA, Space Dynamics Lab (SDL) in Logan, UT, and Air Force Institute of Technology (AFIT) near Dayton, OH. In addition to these three ground stations, DHS S&T funded development of two additional S-band stations located at the ASF (Alaska Satellite Facility) in Fairbanks, AK and the US Coast Guard Academy in New London, CT, though the Coast Guard station was not online until after launch. Finally, in addition to the MC3 node at the ASF, Polar Scout had access to a 7m S-band dish at the same location. The ground station locations can be seen in Figure 5.
The satellites were operated out of the SOC (Satellite Operation Center) at Millennium Engineering and Integration in Albuquerque, NM with mission operations performed at the MOC (Mission Operation Center) at Rincon Research Corporation in Tucson, AZ. Network communications, scheduling and antenna control were handled using SDL's SATRN software, and operator-satellite interface for command and control was performed with the COSMOS software developed by Ball Aerospace. 8)
To support the necessary data rates, the Polar Scout satellites incorporated an S-band radio for both uplink and downlink. Many CubeSats have traditionally used VHF/UHF which, due to the lower data rates and different antenna design, require much less precision in ground antenna pointing (e.g. the ground antenna beam width for VHF communications is quite large). In comparison, the ground stations that support the Polar Scout program all employ 3 m parabolic dishes and the ASF site includes an additional 7.3 m parabolic dish. While the gain leveraged by these large dishes is significant and necessary to support the program, the Full Width at Half Max beam width is 3.3° (1.2° for the 7 m dish) which requires knowledge of the spacecraft location to that degree of accuracy.
All of the 3 m antennas have the capability of either tracking a provided a TLE (Two Line Element) set, or using manually entered azimuth and elevation coordinates if, for example, the team wanted to just point the antenna at a fixed location near the horizon. The 7 m antenna had the capability to track the peak power it received rather than follow the TLE it was provided. The 7 m also had the capability to dither around a provided TLE. Each of these extra abilities beyond TLE tracking was useful in planning and executing satellite acquisition.
For the SSO-A launch, the Polar Scout team was provided with a state vector by the launch provider. The SATRN software controlling the ground antenna movements requires a TLE input and therefore any orbital information we obtained, either from the launch provider or from downlinked spacecraft GPS information needed to be converted to a TLE in order to be useable. A software package such at Systems Tool Kit (STK) can be used to compute TLEs based on a state vector or orbital ephemeris data.

Polar Scout Acquisition Approach
Pre-Launch Preparation: The launch provider will typically provide projected orbital ephemerides 30-60 days prior to launch. With this information Polar Scout was able to determine a rough idea of what the first 24 hours of ground contacts would look like and plan staffing and resourcing accordingly. It also allowed the ground team to tailor plans for the first few days of contacts for each specific ground site and be as prepared as possible.
In planning contacts, the Polar Scout operations team decided to attempt contact with the spacecraft with any pass that went above a 10 º elevation angle. There are pros and cons to satellite acquisition at low elevation angles. On the plus side, the satellite spends more time at low angles than it does at high elevation angles. At low angles, the satellites are significantly farther from the ground site, and therefore timing errors in the TLE have less negative impact. Whereas at high elevation angles the signal to noise is best and if there are issues with Doppler corrections they are minimized, however the spacecraft is moving at much higher angular speeds from the perspective of the stationary ground antenna than it is at the horizon, so timing must be more accurate. Both of these factors played a part in the Polar Scout satellite acquisition plan.
Prior to launch, there should be end-to-end verification of the necessary ground system(s) including the entire transmit/receive paths, and tracking control of the ground antenna(s). If it is possible to have the satellite or engineering model at one/all of the ground sites, that is the ideal verification of the ground system. If that is not possible, or if the verification with the satellite occurred a significant amount of time prior to launch, then the uplink and downlink pipelines can be mostly verified by using some or all of the following mechanisms:
1) Uplink verification can be performed by transmitting signals in a safe direction while verifying their emissions from the antenna with an on-site technician and a hand-held spectrum analyzer. The spectrum analyzer can verify correct transmit frequency and power levels.
2) A better transmit verification is to record the uplink RF signal at the ground site using a software-defined radio. This recording can then be played back to the flight unit (prior to launch integration) or to an engineering unit and the uplinked commands can be verified on the units themselves.
3) Satellite tracking by the ground antenna and RF reception verification is best performed by tracking an existing satellite that emits on S-band frequencies and verifying continuous signal reception throughout the pass. The CALIPSO satellite is a good candidate as it has a continuously operating S-band beacon.
On Polar Scout, the engineering unit was taken to the ASF ground site and end-to-end testing was performed between the SOC and the engineering unit. However, that test occurred over six months prior to launch. Therefore, the RF uplink and downlink tests were performed weeks, days, and even hours prior, leading up to launch to ensure the sites were ready.
Plan for First 24 Hours after Launch: Polar Scout was ejected from the UFF (Upper Free Flyer) on the SSO-A launch. Because the delta-v imparted by the ejection of the CubeSat will cause the spacecraft orbit to diverge from the TLE of the UFF, the first contact opportunity is critical, as there is high confidence that during the first contact the TLE will still provide a good proxy for the spacecraft location. However, within a day or so, errors in the accuracy of the provided TLE, combined with the relative motion between the UFF and the CubeSat can result in the CubeSat no longer being within the ground antenna beam width. With the 6U Canisterized Satellite Dispenser from Planetary Systems, which was used on the Polar Scout launch, ejection velocities are 1.7 m/s. This puts the satellite nearly 150 km away from the launch platform in 24 hours.
From an acquisition perspective, the goal of the first contact opportunity is to simply downlink enough data to get the stored GPS position and velocity history of the spacecraft. With the GPS data from the spacecraft an initial coarse TLE can be generated using a tool such as STK. Note that there will probably be insufficient GPS data to generate a high quality TLE, as was the case for both Kodiak and Yukon. If the spacecraft is contacted while the UFF TLE from the launch provider is still valid, a new TLE can be generated, which can be used to improve the success of future contacts. With proper planning and execution one can entirely prevent any loss of contact due to not knowing the orbit of the satellite.
On the SSO-A launch, the launch provider, Spaceflight Inc., provided GPS-derived orbital parameters of the UFF roughly an hour after launch. These parameters were used to create an updated contact schedule and a TLE for the ground software. A communications check was run about one hour prior to our first contact opportunity.
If contact was not achieved during the first contact opportunity, or if not enough GPS data are present to generate a valid TLE, the plan for Polar Scout was to operate subsequent passes up until 12 hours from launch in a similar fashion as the first pass.
After 12 hours, the UFF TLE may have degraded to the point where tracking the satellite throughout the entire pass is not possible. Therefore, the plan on Polar Scout was for the 3m antennas to use a manual contact whereby the antenna would track an inertial point in the orbital plane. The operators would begin attempting contact 15 minutes prior to the expected rise time and extend to 15 minutes after the expected rise time. In this time frame, the goal is to make contact and download GPS stored telemetry. Without any downloaded GPS data, the operators would use the time that contact was achieved, relative to when it was expected using the UFF TLE. This time offset can be applied to the next contact in order to make contact with the spacecraft for a longer period.
Because the 7 m ground antenna had the ability to track peak power from the spacecraft, for the first 24 hours contact attempts with this ground station would still track the UFF TLE in hopes that the command to transmit would be seen by the spacecraft and the ground antenna could follow the response signal even if the TLE was off. By analyzing the azimuth and elevation angles of the ground antenna during the pass, those data can be used to adjust the satellite orbital parameters and compute a more accurate TLE.
Strategies for More Than One Spacecraft: Sending commands to both spacecraft simultaneously is not an issue due to a narrow band pass filter used on the spacecraft radio receiver, but receiving telemetry from both spacecraft at two ground antennas that are very close together (as was the case in our Fairbanks contacts (7 m & 3 m)) is likely to result in data corruption at the ground radios. Calculations were made and later verified by on-orbit tests to show all of the other ground stations were sufficiently far enough apart that there was not an issue contacting the two spacecraft simultaneously except using both Fairbanks antennas. As such, for all contacts at Fairbanks during the first 24 hours, the strategy was to attempt contact with one satellite for 60 seconds. If no contact was made, the process would be paused while contact with the other satellite was attempted for 60 seconds. These alternating contact attempts would continue until the pass ended or contact was made. If contact was made, that satellite would be allowed to download telemetry for 90 seconds, and then transmission would be halted by the operator. Contact attempts would then focus on the other satellite for the remainder of the pass.
After the first contact opportunity, the operations team selected the spacecraft to attempt to contact with, based on the situation after the first contact attempt. The default plan was for the 7 m antenna to switch spacecraft each time there was a contact opportunity until contact was successful. In pass situations where there was only one ground station that was in view of the satellites, it was alternated which spacecraft operators attempted to contact.
Additional Strategies after 24 hours: If contact had not been achieved within the first day after launch, the spacecraft may have separated enough from the UFF that the UFF TLE is no longer valid and the spacecraft will not be in the beam width of the ground antennas tracking that TLE. As such the antennas will have to be pointed away from the UFF TLE in order to contact the spacecraft successfully. Based on the relative orientation of a ground site to the orbital trajectory, the error between the UFF TLE and the actual spacecraft varies, on a per-pass basis. Table 1 shows the maximum azimuth error for the first 4 days, for Fairbanks antennas. As can be seen, the max value gets larger each day. Also note that while the azimuth angle relative to the UFF TLE becomes greater, so too does the rise/set time error which, after four days can be as high as 193 seconds.
Day | Max Azimuth Error (deg) |
1 | 1.6 |
2 | 2.45 |
3 | 3.19 |
4 | 3.85 |
CSpOC (Combined Space Operations Center) will immediately begin tracking and cataloging objects after launch. If multiple days pass without contact, or contacts are poor and spotty, at the beginning of every day, CSpOC should be checked against the ephemeris of each spacecraft. If a promising TLE exists, the operations team can choose to use it and see if they make contact. The initial CSpOC data products are typically less accurate and there is a good possibility of cross-tagging objects (where the names of two objects, say Object A and Object B might be switched for a given TLE) on these high-volume deployments. Therefore, a promising early TLE is one whose accuracy should not be entirely trusted, but places the candidate within the approximate location of where the operators would like to attempt contact. Even if contact is made, it is important to keep track of what candidate objects were in the vicinity that day, and to monitor their movement over time with respect to CSpOC placeholder names, as both can vary in the early days after launch.
If still using the UFF TLE, there are two options for attempting contact, in order of priority: Inertial Pointing or Scanning.
Inertial Pointing: Orbital mechanics dictate that any radial or in-track delta-v imparted due to the launch ejection will predominantly result in a "time of arrival" error. Due to the rotation of the Earth, this timing error results in ground-based antenna azimuth and elevation pointing errors. These errors, as shown in Table 1, are primarily the result of the spacecraft being early or late in the predicted orbit. Since satellites launched from the same rocket will remain in the same orbital plane, each satellite will pass through the same inertial point at a different time. The inertial pointing method computes time-varying azimuth and elevation pointing angles to an inertial point in the satellite orbital plane, allowing all satellites from the same launch vehicle to pass through the beam of the tracking antenna. Having an opportunity to transmit to each of the satellites increases the potential for finding the correct one.
To make sure the satellite arrival time was encompassed, the orbital plane was tracked for ± 15 minutes from the expected rise time of the UFF TLE. During that time frame contact is attempted continuously and the downlink chain is monitored to detect any signal. For Polar Scout, the ground antenna was kept at a fixed elevation near the maximum. Using a higher elevation angle results in optimal link performance and more precise timing information.
This method was performed on both Kodiak and Yukon spacecraft in order to fine-tune the timing of the TLEs. Both times this was performed, contact was achieved for only about ten seconds, not enough time to get any telemetry, but enough to see the RF constellation and spectrum indicating received downlink power. This detection was sufficient to determine a precise rise/set time offset which allowed refinement of the coarse TLEs generated by the satellite GPS data.
Even for CubeSats with degraded or non-existent GPS on board, using this method to determine the rise time offset can be invaluable. Not only can this information be crosschecked with CSpOC to narrow down the objects that could be associated with the spacecraft, but it can be used to adjust the UFF TLE to achieve successful contacts with the spacecraft in future passes.
In order to implement the inertial pointing method, one must be able to provide a list of azimuth/elevation angles for the ground antenna to track. On Polar Scout, this ability was not available for the Fairbanks 7 m, but was an option for all of the 3 m sites. It is highly suggested that using this method be explored with ground site engineers, tested prior to launch, and executed within the first day or two of launch.
Scanning: While inertial pointing is the preferred approach, if inertial pointing is not available, or fails to make contact, scanning is a backup option that can be tried. Using the best available TLE, determine the azimuth angle when the spacecraft is 10 degrees above the horizon for that ground station. Generate a set of azimuth and elevation angles for the ground antenna that maintains an elevation angle of 10 degrees, but scans in azimuth by ± X angle (see Table 1). Move the antenna 0.15°/second over the scan angle. Begin 10 minutes prior to the expected arrival of the spacecraft and continue 10 minutes after the expected arrival (based on the TLE).
By looking for the spacecraft lower to the horizon, the scanning technique takes advantage of the longer time the spacecraft spends within the ground antenna beam width. At a 10 degree elevation angle most of the atmospheric RF losses are gone and the link performance is acceptable.
With the Polar Scout mission, it was possible to create a dithering pattern with the 7 m antenna while tracking a TLE. The dither was a raster style pattern at ±4 degrees in azimuth and ±2.5 degrees in elevation moving at 1 degree/second. Furthermore, since this antenna also had auto-tracking capabilities, if contact is successful in turning on the spacecraft transmitter, the 7 m antenna will stop dithering and track the signal. The track of this pass can be used to create a TLE that is better than the current TLE being used. Ground stations with dithering and auto-tracking capabilities can increase chances of successful contact and should be used if available.
Beacons and Other Technologies: Polar Scout did not have any beacon capability; the satellites had to receive a series of commands before the transmitter would turn on. Nonetheless, having some sort of beaconing capability would certainly make finding and tracking a satellite much easier. However, obtaining frequency approval for such a beacon might prove to be very difficult. With sufficiently sophisticated FSW, it might be possible to just beacon over ground stations that the program already has approval to radiate at.
It is also worth mentioning a few technologies, some up and coming, that will also make satellite acquisition much easier. With a Globalstar communication module,9) satellite GPS information can be downlinked via the Globalstar network which provides continuous LEO coverage. This provides satellite position information (or other SoH information) beginning right after launch. The Extremely Low-Resource Optical Identifier (ELROI) 10) is a standalone optical bacon designed for CubeSats that provides a means to identify satellites even if the satellite is in an underperforming state. Finally, in 2017 DARPA released a SBIR for development of a spacecraft identification devices, which may result in future CubeSat sized technologies that assist with launch and early orbit acquisition.
Maintaining Successful Contacts After Initial Contact Is Achieved: For a launch with many CubeSats it will take CSpOC many days to catalog all objects and much longer for the customers to identify them. In the case of SSO-A it was 11 days before every object had been identified with a unique TLE and cataloged. It is therefore best to avoid reliance on CSpOC until there is no doubt about positive identification. Until then, the satellite operator must be able to generate TLEs or ephemeris that can be used to calculate ground contact times.
The easiest and most accurate way to achieve this is by using GPS position and velocity data obtained by the spacecraft. However, if GPS data is not an option (e.g. if the satellite does not have a GPS), the available TLE may be refined by using antenna pointing information. Using the TLE that was previously used to successfully contact the spacecraft, track the spacecraft as it ascends and note at which elevation angle contact with the spacecraft was lost. Note, likely contact will be regained as the satellites descends, but for this purpose note the elevation angle that contact was lost as the satellite ascends. For the subsequent pass, adjust the TLE such that the pass starts 10 seconds earlier. Track the ascending spacecraft and note again at which elevation angle the contact with the spacecraft was lost. If the elevation angle for this pass was higher than the previous contact, the TLE is more accurate and should be the new baseline. If not, for the next pass adjust the first pass's TLE to start 10 seconds later. Iterate in this fashion until the TLE is accurate enough to track the spacecraft for the entire pass. Once a TLE is accurate enough to track for the entire pass, it will likely be usable for a number of days. When degradation begins occurring, begin to adjust the timing again in a similar method.
The Polar Scout Success
As might be expected in working with new spacecraft and new ground software and hardware there were a few contact failures before success. The first contact opportunity with the spacecraft was with the Fairbanks ground station; the 3 m dish was going to contact Kodiak, but due to a software error the ground antenna didn't connect to the ground radio. The 7 m successfully commanded Yukon to turn on the transmitter and download telemetry. The 7 m saw signal from the spacecraft for the entire pass but unfortunately the downlink data were not correctly piped to the SATRN software and the data were lost. Kodiak was contacted during the second pass opportunity, while Yukon was contacted during the third pass opportunity. These early contacts allowed the team to determine that both spacecraft were healthy, power-positive, and without urgent anomalies to deal with.
The GPS data that was downloaded during those passes was sufficient to generate rough TLEs that were used for the next 24 hours. During that time frame, the inertial pointing method was used on both spacecraft and provided enough refinement that from that period forward the GPS-derived TLEs were sufficient to maintain contact with the spacecraft for the entire duration of each ground pass.
GPS data from the spacecraft were successfully used to compute TLEs that were used for the first 20 days after launch, even with both spacecraft having degraded GPS performance. By 8 days after launch, the team had identified the closest match to the CSpOC catalog for both spacecraft. Those closest match objects ended up being the correct ones, but to avoid misidentification the team waited until all objects were cataloged and better dispersed. At L+20 it was very obvious which CSpOC objects corresponded to Kodiak and Yukon, at which point the team notified CSpOC of the correct object assignments and transitioned to relying on the CSpOC TLEs for ground contacts.
References
1) "Polar Scout — Space-based Sensors," DHS, URL: https://www.dhs.gov/science-and-
technology/polar-scout-space-based-sensors
2) Holly Wendelin, "Research, Development, Test and Evaluation Spotlight: Polar Scout Program Launches," Coast Guard, 11 December 2018, URL: https://web.archive.org/web/20210307115108/https://coastguard.dodlive.mil/2018/12/rdte-spotlight-polar-scout-program-launches/
3) https://www.nanosats.eu/sat/polar-scout
4) Jeffrey Roberts, Adam Hadaller, "Behind the US's largest Rideshare Launch: Spaceflight's SSO-A," Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-X-03, URL: https://digitalcommons.usu.edu/cgi
/viewcontent.cgi?article=4443&context=smallsat
5) "Coast Guard, DHS S&T Venture into Space with Polar Scout Launch," USCG, 3 December 2018, URL: https://www.dcms.uscg.mil/Our-Organization/Assistant-Commandant
-for-Acquisitions-CG-9/Newsroom/Latest-Acquisition
-News/Article/1703633/coast-guard-dhs-st-to
-venture-into-space-with-polar-scout-launch/
6) Kasandra O'Malia, Gary Stuart, Katherine Fackrell, Heather Powner, Gregg Leisman, Michele Wallner, Giovanni Minelli, "Needle in a Haystack: Finding Two S-band CubeSats in a Swarm of 64 within 24 Hours," Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-WKVI-05, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4414&context=smallsat
7) Giovanni Minelli, Lara Magallanes, Noah Weitz, David Rigmaiden, James Horning, James Newman , Mark Scott, Sean Brady, Chiffon Watkins, Jacob Christensen, Chad Buttars, Ryan Beus, Riley Oakden, "The Mobile CubeSat Command and Control (MC3) Ground Station Network: An Overview and Look Ahead," Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-IX-03, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cg
i?article=4384&context=smallsat
8) Ryan Melton, "Ball Aerospace COSMOS Open Source Command and Control System," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-IX-03, URL: https://digitalcommons.usu.edu/cgi/viewcon
tent.cgi?article=3366&context=smallsat
9) Hank D. Voss, Art White, Stefan Brandle, Jeff F. Dailey, "Globalstar Communication Link for CubeSats: TSAT, GEARRS1, and GEARRS2," Proceedings of the 29th AIAA/USU Conference on Small Satellites, Pre-Conference Workshop, Logan, UT, August 9, 2015, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi
?article=3300&context=smallsat
10) Rebecca M. Holmes, Charles T. Weaver, David M. Palmer, "ELROI: A license plate for satellites that anyone can read," Proceedings of the 32nd Annual AIAA/USU Conference on Small Satellites, Logan UT, USA, Aug. 4-9, 2018, paper: SSC18-XI-01, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi
?article=4131&context=smallsat
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).