Resurs-O1 Program
EO
Atmosphere
Cloud type, amount and cloud top temperature
Radiation budget
Quick facts
Overview
| Mission type | EO |
| Agency | ROSKOSMOS, ROSHYDROMET |
| Mission status | Mission complete |
| Launch date | 20 Apr 1988 |
| End of life date | 31 Dec 2008 |
| Measurement domain | Atmosphere, Land, Snow & Ice |
| Measurement category | Cloud type, amount and cloud top temperature, Radiation budget, Multi-purpose imagery (land), Albedo and reflectance, Sea ice cover, edge and thickness, Snow cover, edge and depth |
| Measurement detailed | Cloud cover, Cloud type, Cloud imagery, Land surface imagery, Upward short-wave irradiance at TOA, Upward long-wave irradiance at TOA, Earth surface albedo, Sea-ice cover, Snow cover, Sea-ice thickness |
| Instruments | MSU-SK, ScaRaB, MR-900B, RMK-2, ISP, MSU-E, OEK DZZ WR |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), High resolution optical imagers, Earth radiation budget radiometers |
| CEOS EO Handbook | See Resurs-O1 Program summary |
Resurs-O1 Program
Resurs-O1 is a Russian/CIS (Commonwealth of Independent States) satellite series. The program was initiated by the USSR defense ministry in 1977 with the objective of observing and monitoring natural Earth resources (similar in function and objectives to the Landsat series of the USA). The very successful early Landsat program (with launches of LS-1 on July 23, 1972, LS-2 on Jan. 22, 1975, LS-3 on March 5, 1978) prompted this reaction of the Soviet Union. The Resurs-O1 program was initially managed by ROSHYDROMET (State Committee for Hydrometeorology and Environmental Monitoring) of Moscow - and later by NPO Planeta, an institution of ROSHYDROMET. NPO Planeta was also the operator of the Resurs-O1 spacecraft series.
The first Resurs-O1 spacecraft started operations in 1985. The program was planned for a long-term observation capability - to continue at least until 2000 (and beyond). Applications: observation of the state of agricultural crops, assessment of hydrological conditions, forest and tundra fires, pollution monitoring etc. 1) 2)
Satellite | Launch Date | Orbit | Sensor complement or payload | Remarks |
Resurs-O1-1 | Oct. 3,1985 | Perigee= 574 km | MSU-E (2), MSU-SK, MSU-S | Analog sensor output and digital transmission |
Resurs-O1-2 | April 20, 1988 | Perigee= 620 km | MSU-E (2), MSU-SK, | Analog sensor output and digital transmission |
Resurs-O1-3 | Nov. 4, 1994 | Perigee=660 km | MSU-E (2), MSU-SK (2), RRA, | Analog sensor output and digital transmission |
Resurs-O1-4 (Cosmos 2360) | July 10, 1998 | Sun-synchronous | MSU-E1 (2), MSU-SK1 (2), MP-900B, RMK-2, ISP-2, NINA, ScaRaB, IRIS | Digital sensor output and digital transmission |
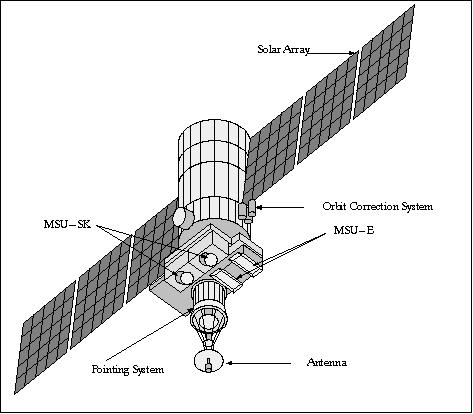
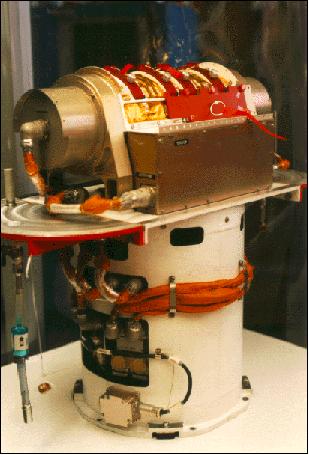
Spacecraft
The Resurs-O1 spacecraft series employed the same bus as was being used by the Meteor-3 series of the former USSR - both platforms were designed and developed by VNIIEM (All-Russian Scientific and Research Institute of Electromechanics), Moscow. The bus is cylindrical with a diameter of 1.4 m. The spacecraft incorporates three-axis stabilization (0.5º accuracy, orientation accuracy of 6 arcmin along the velocity vector). A peak power of 1.2 kW is provided by twin 10-m span solar panels. The S/C design life is 2 years (with a goal of 3 years). The S/C launch mass is about 1800-1900 kg including a payload mass of up to 600 kg. The orbit is adjusted/maintained by ion thrusters.
Total S/C mass. payload mass (average) | 1900 kg, 500 kg |
Earth pointing accuracy | 6 arcmin |
Power generation | 500 W (average, 1200 W (peak) |
Power supply (voltage range) | 23-34 V |
S/C design life | 2 years |
Launch
All Resurs-O1 series spacecraft were launched from the Baikonur Cosmodrome on a Zenit-2 launch vehicle.
• RESURS-O1-4 was launched on July 10, 1998. Secondary payloads on the Zenit-2 vehicle were: TMSat (TMSat was renamed to Thai-Paht-1) of Thailand built at SSTL, the Israeli TechSat/Gurwin-II, WESTPAC of Australia, SAFIR-2 of OHB-System, Bremen, and the Chilean FASat-Bravo (built by SSTL, UK).
Orbit: sun-synchronous near-circular orbit, mean altitude = about 650 km, inclination = 98º, period = 97 minutes; local sun time between 10:00 to 10:30 hours on the ascending node. Note: the Resurs-O1-4 (and planned follow-on) spacecraft have a higher orbit than the Resurs-O1-1 to -O1-3 series. Resurs-O1-4: Sun-synchronous orbit, altitude = 835 km, inclination = 98.7º, period = 101.2 minutes.
RF communications: X-band downlink at 8192 MHz, data rate of 7.68 Mbit/s. However, the main downlink was in UHF at 466.5 MHz. The primary data collection and processing stations for Resurs-O1 series were at Moscow, Novosibirsk, and Khabarovsk.
Parameter | Resurs-O1-3 | Resurs-O1-4 |
Carrier frequency | 8.192 GHz and 466.5 MHz | 8.192 GHz |
Data rate | 7.68 Mbit/s | 15.36 or 61.44 Mbit/s |
Modulation type | QPSK | BPSK (NRZ-M) |
Mission Status
• Resurs-O1-1 (launch Oct. 3, 1985) remained operational for 3 years until 1988 3)
• Resurs-O1-2 (launch Apr. 20, 1988) remained operational for 7 years until 1995
• Resurs-O1-3 (launch 1994) remained operational for 6 years until the end of 2000
• Operations of RESURS-O1-4 continued until April 1999 when a communication failure disrupted the service. The spacecraft ended its operational service on Feb. 7, 2002. 4)
The Monitor-E mission (launch Aug. 26, 2005) is considered a continuation of the Resurs-O1-4 mission.
Sensor Complement
The Russian payloads were designed and developed by ISDE (Institute of Space Device Engineering, Moscow), also referred to as RNII KP.
MSU-E (High-Resolution Multispectral Scanner)
MSU-E is a pushbroom CCD device for Resurs-O1-1 to O1-3). Three spectral ranges of 0.5 - 0.6 µm, 0.6 - 0.7 µm, 0.8 - 0.9 µm are provided. Spatial resolution = 45 m x 33 m (IFOV = 7.11 arcsec x 5.9 arcsec); swath = 45 km (for one device, FOV = 4º) , and 80 km for both devices (some overlapping), repeat cycle = 18 days. MSU-E has a look angle of ±32º (the instrument may be pointed in the cross-range direction thereby extending potential coverage to a 600 km wide strip (±300 km to each side of the S/C). The observation direction of the instrument can be set by ground commands in steps of 2º. The scan rate of MSU-E is 200 lines/s. Instrument mass of 60 kg (2 units). 5)
MSU-E1
The two MSU-E1 devices provide a total swath of 105 km. Otherwise same specification as for MSU-E. Note: Resurs-O1-4 has a higher orbit than Resurs-O1-1 to -3. For Resurs-O1-4 and up, there are changes with regard to: a) look angle of ±30º; and b) swath width = 60 km (for one instrument).
MSU-S (Multispectral Scanner)
MSU-S is a moderate resolution radiometer with 2 spectral bands in the range 0.58 - 1.0 µm with a resolution of 240 m on a swath of 1380 km.
MSU-SK (Multispectral Scanner - Conical Scanning)
MSU-SK is a moderate resolution radiometer with a look angle of 39º. This gives the sensor the advantage that although it is a wide-field sensor, it produces constant resolution and viewing angle for all pixels, resulting in increased radiometric accuracy. Spectral bands (5): 0.5-0.6, 0.6-0.7, 0.7-0.8, 0.8-1.1, and 10.4 - 12.6 µm. Spatial resolution = 170 m (in VIS) and 600 m (TIR). Swath = 600 km, potential repeat cycle = 3-5 days, orbit repeat cycle = 21 days. The scan rate is 50 lines/s in channels 1-4 and 12.5 lines/s in channel 5. The unusual scanner allows the MSU-SK instrument to have an absolute radiometric error of just 1%, a Signal-to-Noise Ratio (SNR) of 80 dB and a noise equivalent temperature of 0.5 K. The data quantization is at 8 bits. Instrument mass = 21kg. Downlink limitations: four out of five bands may be downlinked simultaneously.
MSU-SK1
Instrument for Resurs-O1-4 and up. Spatial resolution = 210 m (VIS) and 700 km (TIR). Otherwise same specification as for MSU-SK. An additional spectral band (3.5 - 4.1 µm) was used for Resurs-O1-4 only.
ISP-2 (Izmeritel Solnechnoy Postoyannoy-2 - a Solar Constant Instrument)
The objective is the measurement of the integral solar irradiation (solar constant) and of the shortwave reflected radiation of the Earth system. It is being used to complement the ScaRaB measurements. The ISP-2 radiometer consists of two channels with bolometer detectors:
• Solar constant channel: spectral band of 0.2 - 10.5 µm, FOV = 5º, accuracy of one measurement = 0.05%, accuracy of day-averaged measurements = 0.01%.
• Reflected radiation channel: spectral band of 0.3 - 3.0 µm, FOV = 60º, accuracy = 1%.
RMK-M (Radiation Measurement Control)
RMK is of RMK-2 heritage flown on the Meteor-3 series satellites. Objectives: Registration of flux densities of protons in the 1-90 MeV and electrons in the 0.17-3.0 MeV energy regions. Measurement of galactic radiation with energies above 600 MeV.
MP-900M TV Camera
The objective is the monitoring (imaging) of reflected radiation of the Earth's surface and atmosphere (clouds) in the VIS and NIR spectral regions. The spatial resolution of the imagery is 1.6 km x 1.8 km.
RRA (RetroReflector Array)
RRA is an array of two corner cubes in a linear array, carried on Resurs-O1-3. The satellite uses Fizeau style reflectors similar in design to those used on Meteor-2-21 [both reflectors have aluminum coating on the reflecting surfaces and near-diffraction-limited Far Field Diffraction Patterns (FFDP)]. - RKA requested the international community to track the RESURS-3 satellite. and to provide signal strength information along with ranging data.
Payloads of Non-Russian Institutions flown on Resurs-O1-4
NINA (New Instrument for Nuclear Analysis)
NINA is a compact telescope, developed by INFN (Italian National Institute of Nuclear Physics) of Rome, Italy and MEPhI (Moscow Engineering and Physics Institute). The objective is to measure fluxes of charged particles, in particular to detect cosmic ray nuclei of galactic, solar, or other origin from hydrogen to iron, between 10 and 200 MeV/n. The silicon detector telescope is composed of 16 X-Y planes, giving information on the energy of the crossing particle and its incident angle. Each of the 32 sensitive elements consists of two n-type silicon detectors, 60 mm x 60 mm, divided in 16 strips and connected to a supporting ceramic frame under lateral strips (1 and 16). Each couple of detector is glued orthogonal in order to provide X and Y independent view information. The thickness of the detector is 150±15 µm for the first plane, and 380±15 µm for the remaining 15 planes. The geometric factor of the instrument ranges from 8.6 cm 2 sr for low energy particles to 1 cm 2 sr for particles crossing the detector. The instrument mass is 40 kg, power = 40 W. - NINA was flown on RESURS-O1-4 only. 6) 7)

ScaRaB (Scanner for Radiation Budget)
ScaRaB is of CNES [France (CNES, LMD), Russia (Planeta, RKA), Germany (GKSS) are program partners]. ScaRaB is a joint development of a cross-track scanning radiometer. ScaRaB on Resurs-O1-4 is also referred to as ScaRab-2 since ScaRaB-1 was part of the Russian mission Meteor-3-7 from March 1994 to March 1995. The objective of ScaRaB-2 is the collection of data on shortwave and longwave radiation (reflected solar and emitted thermal radiation) to estimate the Earth's radiation budget at the top of the atmosphere on global and regional scales. The instrument features four channels. Channels 2 and 3 are considered the main channels, while channels 1 and 4 are auxiliary channels. The optical subsystem features four parallel telescopes, one telescope per channel, they are identical except for their filters. 8) 9) 10) 11) 12)
ScaRaB uses BARNES pyroelectric detectors for all bands (placed at the focus of a spherical aluminium mirror), which are sensitive only to the AC component of the signal (i.e. the modulated energy). Hence, chopping is needed for each pixel. This reduces the influence of the self radiation of the telescope and filters. Two mechanical choppers are used (one for two channels), providing a 10 Hz chopping frequency. The four channels, the two choppers, and a filter wheel dedicated to channel 2 and 3, are mounted on a scanning optical bench (rotor). The telescopes are swiveled by the optical bench so that no extra mirror for the scanning is needed. This reduces the likelihood of offsets dependent on the scanning angle.
Nr. | Spectral band (channel) | Band description | Filter |
1 | 0.5 - 0.7 µm | Visible channel: scene identification | Interference |
2 | 0.2 - 4 µm | Solar channel: derivation of Earth radiation budget parameters | Fused silica |
3 | 0.2 - 50 µm | Total radiation channel | None |
4 | 10.5 - 12.5 µm | Atmospheric channel scene identification (window channel) | Interference |
The spatial resolution of ScaRaB data is 48 x 48 mrad, scan angle=100º, swath width = 3200 km. ScaRaB points to nadir and scans the full field of view (FOV) within six seconds. In this cross-track mode data are generated continuously.
Parameter | Value | Parameter | Value |
IFOV | 48 mrad x 48 mrad | Sampling interval | 34 mrad |
FOV (swath) | 100º (3200 km) | Scan period | 6 s |
Pixels per scan | 51 | Useful scan time | 3.18 s |
Dynamic range (solar) | up to 425 W m-2 sr-1 | Instrument mass, power | 40 kg, 42 W (average) |
Dynamic range (total) | up to 500 W m-2 sr-1 | Instrument size (mm) | 614 x 512 x 320 |
Calibration subsystem: Gray lamps and blackbodies are used for on-board gain calibration; deep space is used for offset calibration. That subsystem comprises a set of two reference blackbodies for channels 3 and 4, and a set of gray calibration lamps for channels 1, 2 and 3. There is continuous thermal control of the blackbodies. The gray lamps are turned on during the calibration session (typically once per day). In addition, there are short wave references, consisting of two lamps for the calibration of channels 2 and 3 (typical use is once per month). On the ScaRaB/Meteor-3-7 mission, however, the lamp system was damaged so that actual calibration was performed by using the instrument temperature and a pre-launch established gain-temperature law. The remaining lamps were then used to verify this calibration. During one year of operation, no significant sensor degradation was observed.
ScaRaB has a duty cycle of 100%, data rate=3 kbit/s, data volume=18 Mbit/orbit. An instrument mass memory provides data storage for up to 12 hours. The mass of the instrument is 40 kg, the maximum power use is 70 W. - The ScaRab instrument was only flown on Resurs-O1-4.
LLMS (Little LEO Messenging System)
LLMS is an ESA communications payload also referred to as IRIS (Intercontinental Retrieval of Information via Satellite). The objective is to provide a low-cost, worldwide electronic mail (e-mail) commercial service (collection and distribution of e-mail messages). The payload consists of four redundant and interconnected units: OBC (On-Board Computer), TT&C, the RF unit and the SS (Spread Spectrum) unit with CDMA modem and UHF transceiver. In the overall configuration, messaging is uploaded during contact periods from the HUB (or gateway) station in the ground segment via satellite to its destination and vice versa (remote subscriber terminal at the one end and fixed user at the other end). Each HUB station pass enables the exchange of all data collected by the satellite (and by the HUB station) since the last contact by store-and-forward techniques. The HUB station, located at the high-latitude site of Svalbard (78º N), Spitzbergen, Norway, for reasons of frequent satellite contact times (visibility of each S/C orbit), is connected via public network to the user community. A dedicated TT&C station provides in addition operations control of the payload(s). The message storage and retrieval functions of OBC are handled by an adaption of a transputer-based architecture already flown on BREMSAT-1 and on SAFIR-1/2 satellites. The total mass of the attached LLMS/IRIS payload is 67 kg, its power consumption is 72 W, of which 44 W is for the communication payload (RF+SS). 13) 14) 15) 16) 17)
Background: The LLMS/IRIS program, an initiative of Belgium's space industry, is mainly financed by the Federal Office for Scientific, Technical and Cultural Affairs (OSTC) of Belgium, with a contribution from its German counterpart (DLR). The development of this advanced telecommunication platform (a turnkey demonstrator system) has been carried out within the context of an ESA development initiative, under SAIT-Systems S. A. of Brussels as the prime contractor. Other industrial participants in the program are: OHB-System of Bremen, Germany, Alcatel Bell of Belgium, the SEMA Group SAE of Spain, and Warberry Communications, UK. LLMS/IRIS is the first Little-LEO communications system using spread-spectrum modulation in the service links to and from the S/C as well as on-board demodulation techniques. SAIT Systems has also a contract from ESA to operate LLMS/IRIS for a period of three years. 18)
Communication concept: LLMS/IRIS is employing a data transmission scheme referred to as SSMA (Spread Spectrum Multiple Access) in the UHF frequency band (uplink at 388 MHz, downlink at 400.6 MHz), permitting shared operations for customer services from remote user terminals. SSMA is used in both directions (uplink and downlink) offering such advantages as: a) interference-tolerant transmission, b) use of anti-jamming features, c) the random access scheme provides very good channel discrimination for multiple access, and d) it permits the measurement of propagation time between payload and user terminal (in combination with the Doppler estimation this measurement enables the system to localize the user terminal). The chip-based timing resolution of the spread-spectrum downlink is 0.2 µs. Localization accuracies projected: a)<3 km for coarse and b) <1 km for fine localization.
The communication payload can be put into one of two different communication modes:
• Service link: The service link is used for communication between the user terminal and the payload (or vice versa).
• Feeder link. The feeder link serves as high-rate communication link between the payload and the HUB station.
Parameter | Service downlink | Service uplink | Feeder downlink | Feeder Uplink |
F-chip (MHz) | 0.538 | 1.077 | 0.538 | 1.077 |
L (chips) | 128 | 512 | 32 | 64 |
Efficiency (bit/symbol) | 2 | 1 | 6 | 6 |
Byte/slot | 134 | 134 | 345 | 345 |
Symbol rate (s/s) | 4207 | 2103 | 16,827 | 16,827 |
Brute bit rate (bit/s) | 8,414 | 2103 | 100,962 | 100,962 |
Net bit rate (bit/s) | 4,709 | 1,177 | 71,112 | 71,112 |
Slot duration (ms) | 127.4 | 509.7 | 27.3 | 27.3 |
Modulation scheme | O-QPN | B-PN | O-QPN | B-PN |
A user terminal (fixed or mobile) design resorts to custom (ASIC) integration to process the spread-spectrum signals used by LLMS/IRIS. Typical terminal characteristics are:
• Standard RS-232 interfaces (one RS-232 opto isolated)
• Antenna: 1/4 wave groundplane or drooped-dipole
• Batteries: 6 x UM-3; standby: autonomy for 100 hrs, and continuous receive for 5 hrs
• Transmit power of <3 W
• Terminal size: 200 mm x 150 mm x 50 mm; mass < 1 kg.
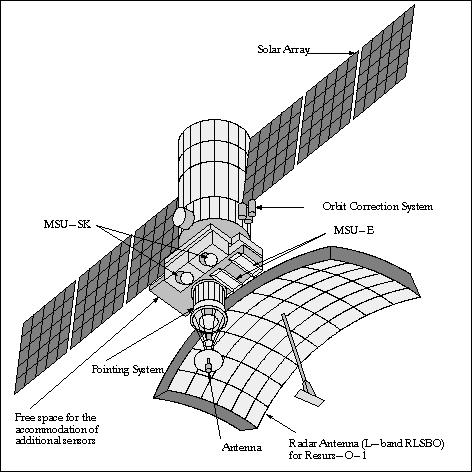
Extension of Resurs Program
Originally, the Resurs-O1 series was scheduled to be replaced by the Resurs-O series, an evolutionary series with an increased payload in the time frame 2000 and beyond. However, the program was stalled at the start of the 21st century due to the tight economic situation in Russia.
A major payload addition to this Resurs-O series was to be a radar instrument, RLSBO (Side Looking Real Aperture Radar) in L-band as shown in Figure 4. 19)
References
1) T.M. Wasjuchina, A.M. Wolkow, “Zustand und Perspektiven der Entwicklung Kosmischer Systeme zur Erforschung natürlicher Ressourcen der Erde und der Hydrometeorologie,” Moscow 1988, translated into German by R. Müller, 1989 (IKF)
2) COSPAR-90-Paper by A. Karpov, USSR State Committee for Hydrometeorology, Moscow. Title of paper: “Hydrometeorological, Oceanographic and Earth-Resources Satellite Systems operated by the USSR.”
3) http://sputnik.infospace.ru/resurs/engl/resurs.htm
4) Information provided by Igor V. Cherny, Space Observation Center, Roskosmos, Moscow
5) Information provided by B. Kutuza of IRE, Moscow, and translated by B. Zhukov of DLR, Oberpfaffenhofen
6) R. Sparvoli, et al., “Launch in orbit of the telescope NINA for cosmic ray observations: preliminary results,” Proceedings of The Sixth Topical Seminar on `Neutrino and Astro-Particle Physics,' Centro Studi `I Cappuccini' in San Miniato al Todesco, Italy, May 17-21, 1999
7) http://wizard.roma2.infn.it/nina/html/nina_home.htm#
8) http://smsc.cnes.fr/SCARAB/
9) http://www.lmd.polytechnique.fr/~Scarab/english/Orbs.htm
10) J.-Ph. Duvel, M. Viollier, P. Raberanto, R. Kandel, M. Haeffelin, L. A. Pakhomov, V. A. Golovko, J. Mueller, R. Stuhlmann, “The ScaRaB-Resurs Earth Radiation Budget Dataset and First Results,” BAMS (Bulletin of the American Meteorological Society), Vol. 82, No 7, July 2001, pp. 1397-1408
11) J. L. Monge, R. Kandel, L. A. Pakhomov, B. Bauche, “ScaRaB Earth radiation budget scanning radiometer,” SPIE, Vol. 1490 , `Future European and Japanese Remote Sensing Programs,' 1991
12) J. Mueller, et al., “Ground Characterization of the Scanner for Radiation Budget (ScaRaB) Flight Model 1,” Journal of Atmospheric and Oceanic Technology, Vol. 14, No 4, pp.802-813, 1997.
13) V. Larock, A. Jongejans, “IRIS, First Operations,” presented at the Conference on “Small Satellites Systems and Services,” Sept. 14-18, 1998, Antibe-Juan les Pins, France
14) C. van Himbeek, I. Deman, B. Clarenne, “The LLMS DS/SS (Direct Sequence/Spread Spectrum) Payload,” accepted for ISSSA (International Symposium on Spread-Spectrum Techniques & Applications), Darmstadt 1996
15) V. Larock, A. Ginati, “IRIS: Going Commercial with High-Tech European LEO Microsatellites,” Proceedings of the IAF '94
16) “First European Payload for Worldwide E-Mail Service Launched,” ESA Bulletin 95, Aug. 1998, p. 179
17) http://www.esa.int/esaCP/Pr_25_1998_p_EN.html
18) P. B. de Selding, “Belgium Firm Seeks Investors for IRIS E-Mail Venture,” Space News, Sept. 28 - Oct. 4, '98, p. 22
19) Yu. V. Trifonov, ”The Russian Space Earth Observation System 'Resurs-O'”, Space Bulletin, Vol. 1, No. 2, 1998, pp. 11-13
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).