RISAT-1 (Radar Imaging Satellite-1)
EO
Land
Operational (extended)
Vegetation
RISAT-1 (Radar Imaging Satellite 1) is a series of Synthetic Aperture Radar (SAR) satellites developed by the Indian Space Research Organisation (ISRO) for all-weather, day-and-night Earth observation, supporting applications such as agriculture, geology, and flood monitoring. RISAT-1, launched in April 2012, was India's first developed radar imaging satellite. RISAT-1A (EOS-4), launched in February 2022 with enhanced capabilities for agricultural monitoring, forestry, soil moisture estimation, and disaster management. RISAT-1B (EOS-9), was lost during launch in May 2025 due to a third-stage failure of the PSLV-C61 rocket.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Operational (extended) |
| Launch date | 26 Apr 2012 |
| Measurement domain | Land, Snow & Ice |
| Measurement category | Vegetation, Sea ice cover, edge and thickness, Soil moisture, Snow cover, edge and depth, Inland Waters |
| Measurement detailed | Sea-ice cover, Snow cover, Soil moisture at the surface, Surface Water Extent, Vegetation Canopy (cover) |
| Instruments | SAR (RISAT) |
| Instrument type | Imaging microwave radars |
| CEOS EO Handbook | See RISAT-1 (Radar Imaging Satellite-1) summary |

Summary
Mission Capabilities
RISAT-1 carried a single instrument, RISAT-SAR, a C-band high resolution radar imager. RISAT-SAR monitored a multitude of indicators relating to vegetation, agriculture, forestry, soil moisture, geology, coastal and ocean monitoring, object identification, and flood monitoring. These objectives were achieved through five operation modes, HRS (High Resolution Spotlight), FRS-1 (Fine Resolution Stripmap-1), FRS-2 (Fine Resolution Stripmap-2), MRS (Medium Resolution ScanSAR), CRS (Coarse Resolution ScanSAR) and both co-polarisation and cross-polarisation imaging. An identical RISAT-SAR instrument is also carried by RISAT-1A (also known as EOS-04 (Earth Observing Satellite 04)), developed by ISRO, which launched in February 2022.
Performance Specifications
RISAT-SAR operates in C-band, with a frequency of 5.35 GHz and a field of regard of 659 km across all operation modes. Its imaging modes vary in spatial resolution and swath, with identical single and dual polarisation capabilities, for all but FRS-2, which is capable of quad-polarisation. The resolutions between the modes vary from 1 - 50 m, and the swath widths vary from 10 - 240 km. RISAT-SAR uses a side-looking scanning technique, capable of operation on both left and right hands, 20°- 49° off-nadir, and has an incidence angle coverage of 12°- 55°.
RISAT-1 operated in a sun-synchronous orbit of altitude 536 km, inclination 97.55° and LTAN (Local Time on Ascending Node) 0600 and 1800 hours.
Space and Hardware Components
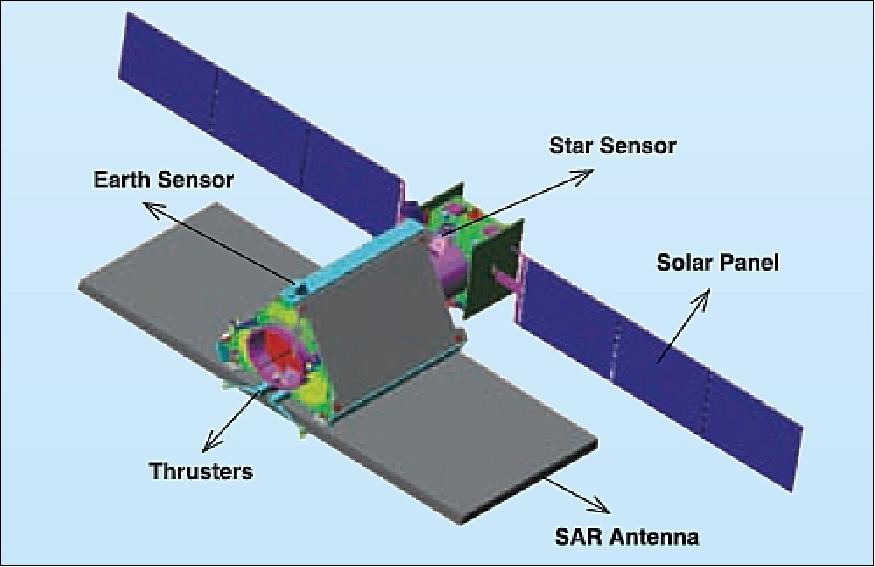
RISAT-1 used a satellite bus developed for the mission by ISRO, with a launch mass of 1858 kg, and a design life of five years, of which it achieved 4 years and 11 months before ceasing operation. The bus incorporated an AOCS (Attitude and Orbit Correction Subsystem), consisting of a 4π sun sensor, magnetometer, IRU (Inertial Reference Unit), star sensor, earth sensor, DSS (Digital Sun Sensor) and SPSS (Solar Panel Sun Sensor), as well as eight 11N canted thrusters, one central 11N thruster and 4 reaction wheels. This allowed for pointing accuracy of 0.05°, a drift rate of 5.0 x 10-5 °/s and attitude knowledge of 0.02°. In terms of RF communications, TT&C (racking, Telemetry and Control) transmissions were broadcast in S-band, with a data rate of 4 Kbit/s, while data downlink was transmitted in X-band, with a data rate of up to 640 Mbit/s.
RISAT-1 (Radar Imaging Satellite-1)
Overview
RISAT-1 is the first indigenous satellite imaging mission of ISRO (Indian Space Research Organization) using an active radar sensor system, namely a C-band SAR (Synthetic Aperture Radar) imager, an important microwave complement to its optical IRS (Indian Remote Sensing Satellite) series observation missions. The overall objective of the RISAT-1 mission is to use the all-weather as well as the day-and-night SAR observation capability in applications such as agriculture, forestry, soil moisture, geology, sea ice, coastal monitoring, object identification, and flood monitoring. The RISAT-1 specifications have been drawn with the national requirements in mind. 1) 2) 3) 4) 5)
RISAT-1 is a newly developed agile spacecraft, featuring a multi-mode and multi-polarisation SAR system in C-band, providing spatial resolutions in the range of 1-50 m on swath widths ranging from of 10-225 km.
RISAT-1 comprises around 1400 subsystems, including 300 processors. The active array subsystems are large in number and less on design variety. Each of the subsystems requires rigorous space grade fabrication and qualification. Fabrication and characterisation of each of these subsystems are typically spread over 5–6 weeks. Industrial production and space qualification of the subsystems were carried out by the Indian industry based on in-house designs of ISRO. These industries had limited exposure to space-grade electronics and therefore in the spirit of partnership, they had to undergo a rigorous regime of training in space-grade fabrication processes, qualification methods and documentation processes. This also helped in the development of indigenous source of RF MMICs (Monolithic Microwave Integrated Circuits), TR modules, ASICs (Application Specific Integrated Circuits), miniaturised power supply and printed antenna array. RISAT-1 effectively acted as a catalyst in expanding the indigenous industrial base for production of space-grade SAR subsystems. 6)
ISRO used its in-house pool of ingenuity in conceptualising, engineering and realising the SAR system of RISAT-1, which is a vastly complex payload with significant level of flexibility in reconfiguration to meet different imaging requirements and ease of operability. This was possible because of large on-board software spread over 300 processors. The characterisation of the system itself was unique, where all the 126 beams have been characterised with precision. This resulted in calibration and quick operationalisation of the system.
Realisation of the RISAT-1 state-of-the-art radar imaging satellite needed significant developments in the spacecraft capabilities to accommodate large mass, power and transmission data rates. For example, the data transmission rate was increased six fold from 110 to 640 Mbit/s. With a mass of 1858 kg, RISAT-1 is heaviest among ISRO's remote sensing satellites, it is the lightest satellite compared to those belonging to the same class.
RISAT-1A
RISAT-1A (also known as EOS-4) is a radar imaging satellite developed by ISRO as part of its RISAT series, designed to enhance India’s remote sensing capabilities using an active C-band Synthetic Aperture Radar (SAR) system. Like its predecessor RISAT-1, it supports all-weather, day-and-night imaging, complementing the optical IRS satellite missions. The satellite serves national applications including agriculture, forestry, soil moisture assessment, coastal monitoring, flood mapping, and disaster management. RISAT-1A features an agile, multi-mode SAR payload with variable resolution (1–50 m) and swath widths ranging from 10–225 km, tailored for versatile imaging requirements. Built with significant indigenous content, it embodies ISRO’s emphasis on self-reliant technology development, including advanced space-grade RF electronics, TR modules, and MMICs. The mission continues the legacy of RISAT-1 in expanding domestic industrial capabilities in SAR subsystems.
A follow-up mission, RISAT-1B (EOS-9), was also planned, but it failed to reach orbit during launch on May 18, 2025.
Spacecraft
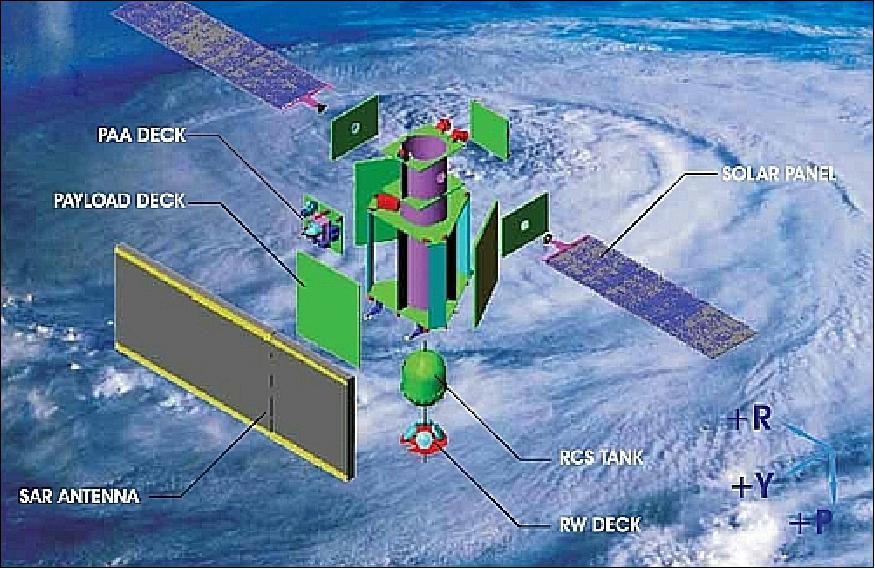
The spacecraft structure is designed to meet the stiffness, strength and pointing requirements of the payload, sensors and also confining the overall bus volume within the launch vehicle envelope. It is based on a single bus concept built around a central cylinder. A truncated triangular structure is built around the cylinder to hold the SAR antenna and major bus service elements. A cuboid structure is built on top of the cylinder to accommodate the solar arrays, majority of the sensors and antennae. The primary structure consists of a central cylinder, interface rings and shear webs. The central cylinder is of sandwich construction with aluminum core and CFRP (Carbon Fiber Reinforced Polymer) face skin. It has an aluminum alloy interface ring at the bottom to interface with the launch vehicle. The cylinder also provides interface for the propellant tank and reaction wheel deck. The secondary structures consist of equipment panels/decks of the payload module and the cuboid module (Ref. 5).

The payload module structure consists of three equipment panels, three corner panels and top and bottom deck. All the equipment panels and corner panels of the payload module are made of sandwich construction with aluminum core and aluminum face skin, whereas the shear webs are made of sandwich construction with CFRP face skin. The triangular decks carry the hold-down brackets to hold the SAR antenna in launch configuration.
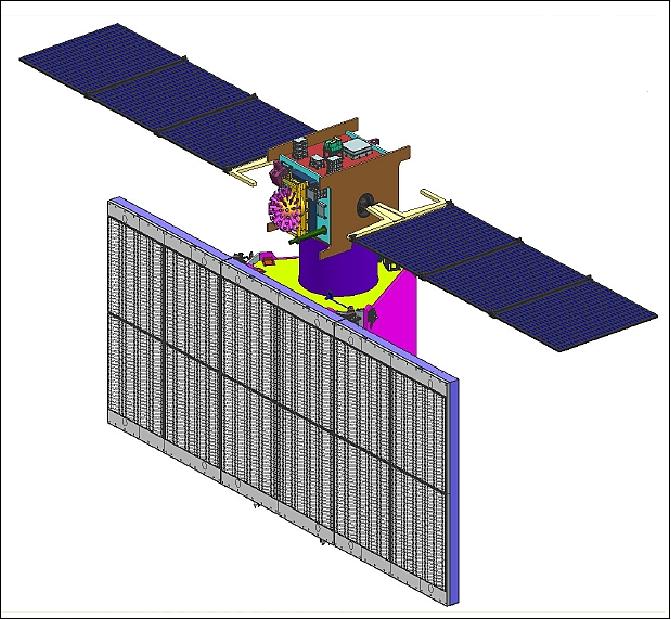
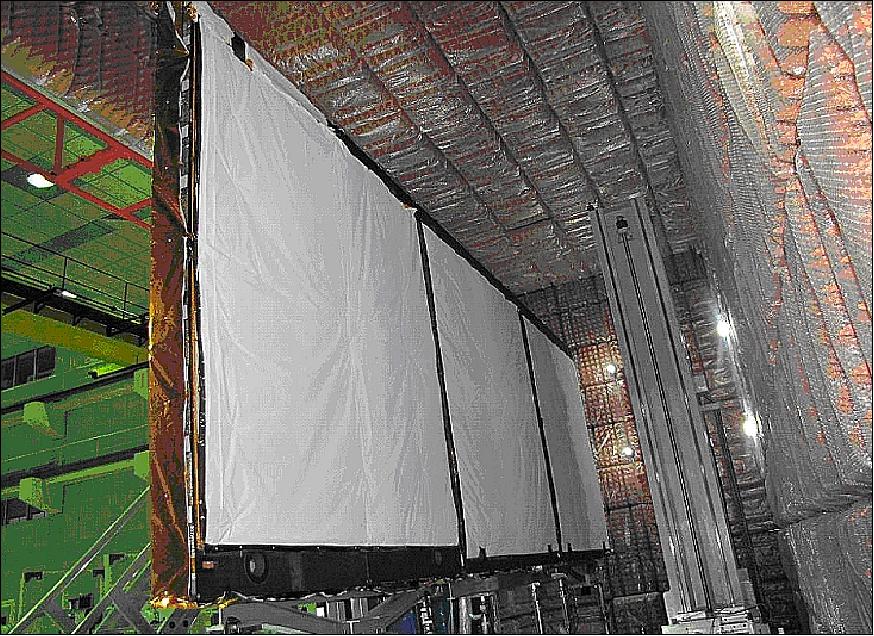
The SAR antenna is comprised of three panels, of which one is fixed and the other two are stowed onto either sides of the triangular structure during launch and are deployed in the orbit. Tile substrate and panel frame are two basic structures over which the SAR payload is built. The radiation patch antennae are bonded on one side of the tile substrate and the tile electronics mounted on the other side of the substrate. Four tiles form a panel for the SAR antenna. To support these four tiles, a framed structure is evolved. Most of the sensors, antennae, solar arrays and their associated electronics are mounted in the cuboid module. RISAT-1 main structure is shown in Figure 2.
The subsystem layout has been evolved considering various factors like electrical requirements, interfaces among various subsystems, physical size and location feasibility, look angle and FOV (Field of View) requirements of various elements (payloads, sensors, antennae), thermal requirements, mechanical loads, transmissibility factors, physical parameters and balancing, ease of assembly/dis-assembly and accessibility during AIT (Assembly, Integration and Testing) and pre-launch operations. All the subsystem electronics packages are accommodated on the equipment decks/panels.
The payload module (triangular structure) accommodates most of the mainframe systems and the payload electronics. The cuboid module accommodates solar arrays, most of the sensors and antennae, viz. DSS (Digital Sun Sensor), SPSS (Solar Panel Sun Sensor), ES (Earth Sensor), 4π sun sensors, PAA (Phase Array Antenna), TTC antennae and SPS (Satellite Positioning Subsystem). All the RCS (Reaction Control Subsystem) components are accommodated on one of the shear webs and the exterior surface of the triangular bottom deck. The propellant tank is mounted inside the main cylinder. The reaction wheels are mounted on a circular deck in a tetrahedral configuration. The circular deck is accommodated inside the main cylinder below the tank and is connected to the cylinder through a ring.
TCS (Thermal Control Subsystem): The configuration and equatorial crossing time of RISAT-1 are different from other satellites in the IRS series of ISRO. Though it is an Earth-oriented satellite, during payload operation the satellite will be rotated by ± 36° about the roll axis. This new configuration, orientation and equatorial crossing time result in new external load patterns and extreme load conditions which are different from other IRS satellites. Moreover, a number of heat dissipating packages are accommodated inside the structure.
Thermal control is provided using space-proven thermal control elements such as an OSR (Optical Solar Reflector), MLI (Multilayer Insulation), paints, thermal control tapes, quartz wool blanket, sink plates and heat pipes. In addition, heaters will be provided to maintain temperatures during cold conditions.
Mechanisms: The RISAT-1 spacecraft employs a SAR antenna deployment mechanism and a solar array deployment mechanism. The SAR antenna and the solar array are stowed during the launch and are deployed in the orbit in order to meet the constraints imposed by the launch vehicle. In order to perform deployment in orbit, a hold-down and release mechanism is employed. The solar array deployment mechanism is identical to earlier IRS missions.
The deployed SAR antenna has dimensions of 6.29 m x 2.09 m x 0.220 m. It consists of three panels out of which one is rigidly attached to the triangular structure. In the launch configuration, the deployable panels are folded over the triangular structure and are held by using a hold-down mechanism. In orbit, both deployable panels are released sequentially and deployed. The mass of each panel is about 290 kg.
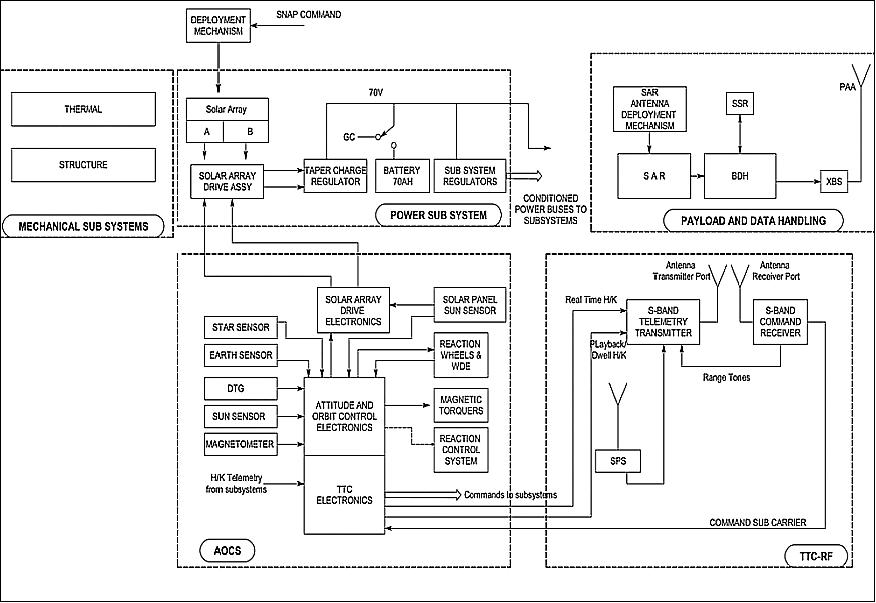
EPS (Electrical Power Subsystem): The EPS consists of solar arrays for power generation, chemical battery for power storage and power electronics for power conditioning and distribution. It is designed to meet the 6 hour and 18 hour orbit illumination conditions, the large power requirement of the SAR payload and the solar eclipse conditions during the summer solstice.
The solar array consists of six panels arranged in two wings with three panels in each wing in the positive roll and the negative roll axes. The array consists of multi-junction cells connected in series and parallel for optimum performance. The solar array drive assembly helps in compensating the roll bias (± 36°) given during payload operation and also aids in obtaining more generation near pole transit. The energy storage system for RISAT-1 employs a single NiH2 battery of 70 AH capacity to meet the peak load requirement and also the eclipse requirement.
The EPS uses a single-bus system operating at 70 V, and the configuration is arrived at to meet all the requirements of users and interfaces. During the sunlit period, the array is regulated to 70 V and the battery gets charged. A BDR (Battery Discharge Regulator) supports power to the bus when the load demand exceeds the array generation during payload operation and eclipse conditions by regulating the bus to 70 V. The bus voltage selection is mainly driven by the payload requirement. The single bus of 70 V is fully protected against over voltage, over current and is single-point failure proof. The bus is distributed to all users through fuses, centrally located in fuse-distribution packages. Software logic (software resident in the on-board controller) enhances the safety of the power system.
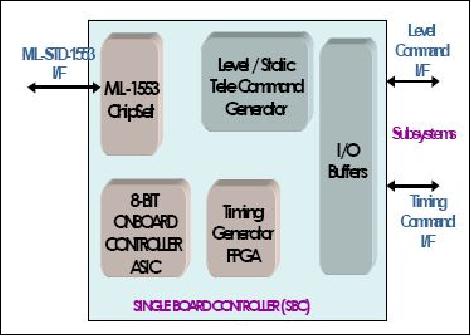
OBC (On-board Computer): To minimise power, weight and volume, the spacecraft functions like commanding, housekeeping (telemetry), attitude and orbit control, thermal management, sensor data processing, etc., have been integrated into a single package called OBC, which also implements the MIL STD 1553B protocol for interfacing with other subsystems of the spacecraft (Figure 4).
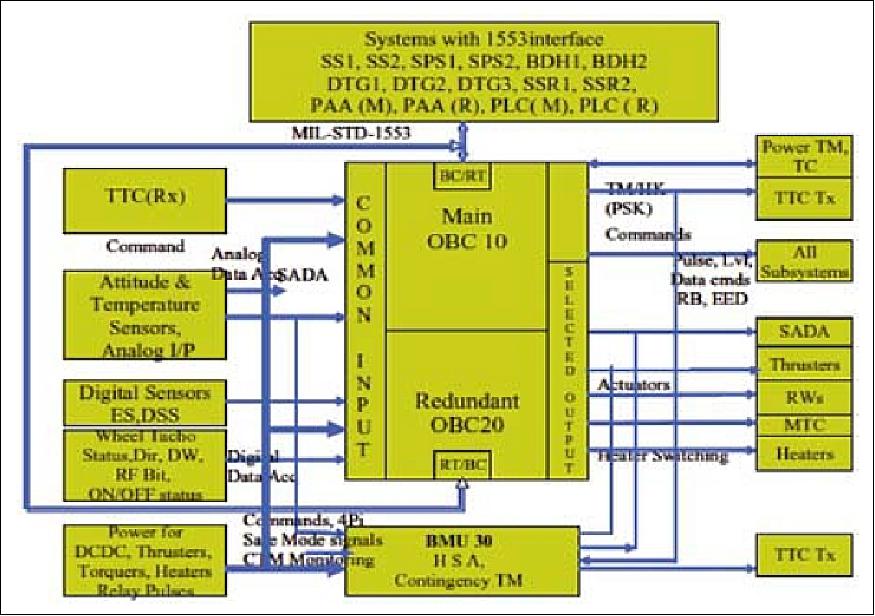
The use of MIL STD 1553B interfaces between the OBC and the other subsystems greatly decreases the volume and mass of cabling, and the associated connectors. The OBC system is realised with the functions of sensor electronics, command processing, telemetry and housekeeping, attitude and orbit control and thermal management. Besides, the OBC interfaces with power, telemetry–telecommand (TM–TC; RF) for command and telemetry, sensors, heaters, thrusters and reaction wheels through special control logic.
AOCS (Attitude and Orbit Control Subsystem): The integrated AOCS specifications during imaging are as follows: pointing: ± 0.05° (3σ ); drift rate: ± 3.0 x 10 -4 º/s. The AOCS for RISAT-1 is configured with 4π sun sensor, magnetometer, IRU (Inertial Reference Unit), star sensor, earth sensor, DSS (Digital Sun Sensor) and SPSS (Solar Panel Sun Sensor). Actuation is provided by eight 11 N canted thrusters (mono propellant hydrazine system operating in blow-down mode) with two-axis canting from + pitch axis for acquisition and OM operation, one (1) central 11 N thruster for OM operation, 4 reaction wheels (of capacity 0.3 Nm torque and 50.0 Nms) mounted in tetrahedral configuration about the – pitch axis, and magnetic torquers of 60.0 Am2 capacity for momentum dumping. The sun sensors, star sensors and magnetometer provide attitude data in the form of absolute attitude errors. The magnetometer, 4π sun sensor and temperature sensor data are processed in the OBC. All AOCS software modules are implemented in the OBC.
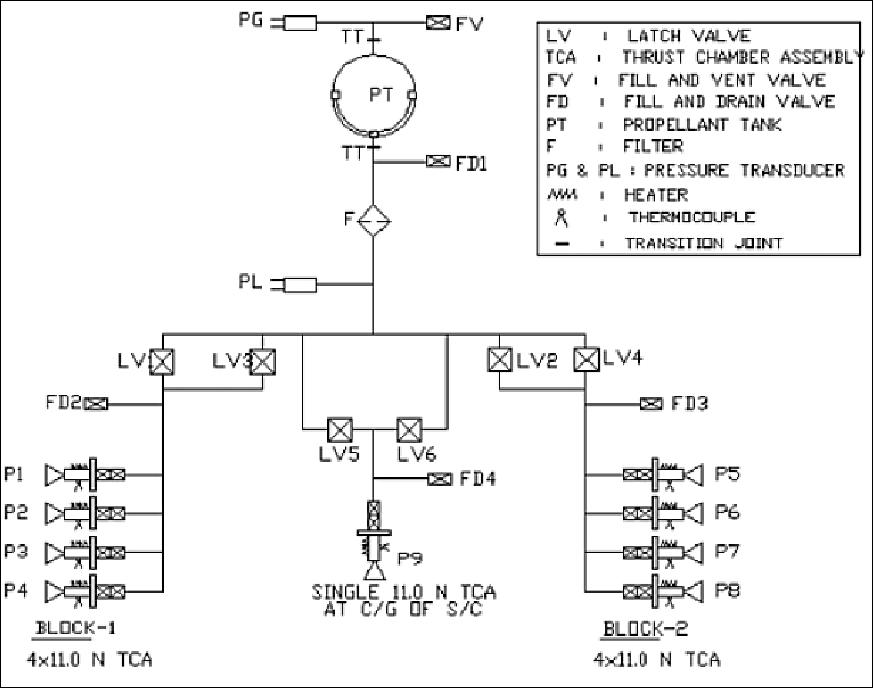
RCS (Reaction Control Subsystem): The RCS comprises a propellant tank, thrusters (9 of 11 N), latch valves, fill and drain/vent valves, pressure transducers, system filters, thermocouples, flow control valves and titanium tubes to connect all the reaction control elements. A block schematic of the RCS is given in Figure 5. One central 11 N thruster is meant for orbit control and the remaining eight 11 N thrusters for attitude control.
TT&C subsystem: The RF communications for RISAT-1 consists of two chains of PLL (Phase Locked Loop) coherent S-band transponder connected to a common antenna system. The basic configuration is identical to the ones employed in earlier IRS missions. The TC demodulation scheme is PSK (Phase Shift Keying)/PCM (Pulse Code Modulation) with a date rate of 4 kbit/s. The transponder consists of a receiving and transmitting system and can operate in either coherent or non-coherent mode. The range and two-way Doppler data from the transponder are useful for orbit determination.
PDHS (Payload Data Handling Subsystem): The RISAT-1 payload data need to be transmitted either in real-time or in playback mode depending upon the data rates at different modes. The data-handling system of RISAT-1 is configured with two formatters for each of the SAR payload receivers respectively (Figure 7).
These are high data rate formatters for different data rates of payload with memories for burst data formatting. The systems have been realised with FPGAs (Field-Programmable Gate Arrays) and the design is optimised for mass, power and volume. Whenever the data rate of the SAR payload and BDH overhead together is greater than 640 Mbit/s, real-time transmission is not possible and the data is recorded in SSR. The recorded data can be played back later. The PDHS can operate in real-time, real-time stretch mode, record, and playback modes.

SSR (Solid State Recorder): The SSR has a capacity of 300 Gbit, realised with six memory boards of 50 Gbit capacity each. The memory boards, by default are configured into two partitions each of 150 Gbit with three memory boards per partition. The SSR has two control units for configuring and controlling the internal operations. The controller has two separate 32-bit parallel interface with memory boards. The default configuration is for two partitions; however, the system can be configured for single partition with allocation of all the memory boards to the selected partition. The SSR is able to manage up to 32 different files for each input port. The memory management guarantees the usage of all good devices by automatic configuration after the diagnostics command is issued.
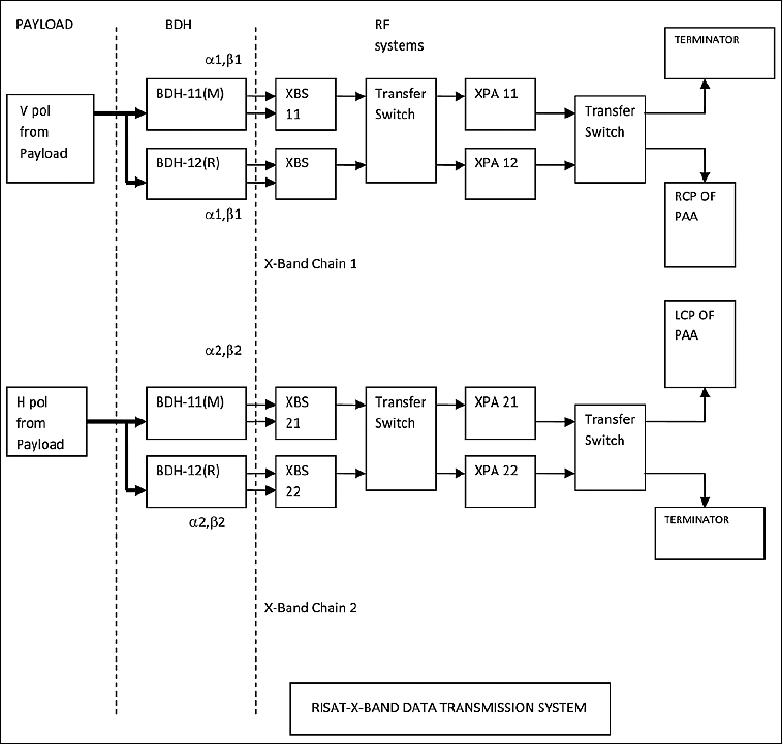
X-band subsystem: The X-band RF is required to accept the payload data from the baseband data handling system, modulate the above data on two X-band carriers and transmit the same to the ground after suitable amplification and filtering.
The SAR payload of RISAT-1, when operated in dual polarisation imaging mode, generates data at the rate of 640 Mbit/s and this needs to be transmitted to the ground stations. Data rates up to 170 Mbit/s have been transmitted in X-band using a shaped beam antenna in earlier missions like IRS-1C/1D and PAA (Phased Array Antenna) in Technology experiment satellite. In order to meet the high data rate transmission requirement in X-band, QPSK (Quadrature Phase Shift Keying) modulation with frequency reuse by polarisation discrimination is implemented.
In the data transmission for RISAT-1, half the data, i.e. 320 Mbit/s will be transmitted in RHCP (Right-Hand Circular Polarization) and the remaining 320 Mbit/s in the LHCP (Left-Hand Circular Polarization); two identical chains operating at X-band are used to transmit 640 Mbit/s of payload data. The carrier generation section, QPSK modulator section, filter units, and the selection of the main and redundant chain units are identical in all the chains, as the frequency of operation and modulation schemes is identical. Both the chains have end-to-end redundancy.
PAA (Phased Array Antenna): The spherical PAA has radiating elements distributed almost uniformly on a hemispherical surface. It generates a beam in the required direction by switching ‘ON' only those elements which can contribute significantly towards the beam direction. It is proposed to use the 64 element array.
Operationally, PAA consists of two identical phased arrays, one operating in RHCP and the other operating in LHCP, and located in the same hardware. On the spherical dome, an element is located at a defined location. A waveguide radiating element fed by a septum polariser is planned and this has two ports, one for RHCP and the other for LHCP. The radiating element is optimised to provide the required isolation (better than –25 dB) between the two polarisations to minimise the interference.
The RHCP and LHCP ports of the phased array are connected to two separate sets of power dividers and MMIC (Monolithic Microwave Integrated Circuit) amplifiers. A common beam steering electronics controls the switch position and phase setting for all the MMIC amplifiers. The data transmission chain is given in Figure 7.
SPS (Satellite Pointing Subsystem): The SPS for RISAT-1 comprises a 10-channel C/A code GPS receiver at L1 (1575.42 MHz) frequency. SPS is designed for computing the state vector of the high-dynamic platform. The SPS will have a full-chain (end-to-end) redundancy. Each chain consists of a receiving antenna, low-noise amplifier, RF amplifier and power divider in L-band followed by a 10-channel and 8-channel GPS receiver with a MIL 1553B interface. Each GPS receiver consists of two highly dynamic GPS RCE (Receiver Core Engine) modules to compute the state vectors, one receiver chain will be active at a time.
The SPS is placed on the RISAT-1 spacecraft to track the GPS signals continuously. It requires an antenna system with hemispherical radiation coverage to receive the circularly polarised GPS signal from the navigational satellites. A micro-strip patch antenna is used for this application.
In the non-observation support mode, the active antenna is pointed in the nadir direction. Prior to each observation sequence, the spacecraft is roll-tilted to an angle of ± 34º. This means observations can be performed on either side of the ground track (an advantage for event monitoring support). In addition, the spacecraft offers the capability of pitch steering of up to ± 13º in support of high-resolution imaging (HRS mode). RISAT features also the capability of yaw-steering to minimise the Earth rotation effects.
The new technologies in RISAT include: 160 x 4 Mbit/s data handling system, 50 Nms reaction wheels (with a torquing capability of 0.3 Nm), a SAR antenna deployment mechanism, and a phased array communication antenna with dual polarisation.
Parameter | RISAT-1 | RISAT-1A (EOS-4) |
|---|---|---|
Spacecraft launch mass | 1858 kg, including ~ 950 kg of SAR payload mass | 1710 kg, including C-band SAR payload |
AOCS (Attitude Orbit Control Subsystem) | - Pointing accuracy: 0.05º | • Pointing accuracy: 0.05º |
Power | - Solar array generating 2.2 kW, | • Solar array generating 2.28 kW |
Design life | 5 years | 5 years |
RF communications | TT&C data in S-band | • TT&C in S-band |
Orbit | SSO, altitude = 536 km, inclination = 97.55º, LTAN = 6:00 hr and 18 hr | SSO, 524.87 km altitude, 97.5° inclination, LTAN = 6:00 IST |
Payload operations duration (duty cycle) | 12 minutes/orbit | 12 minutes/orbit |


RISAT-1A
RISAT-1A carries a high-resolution C-band Synthetic Aperture Radar (SAR) payload for all-weather, day-and-night imaging. Weighing approximately 1710 kg at launch, the satellite features an agile, multi-mode radar system capable of operating in various polarizations and resolutions ranging from 1 - 50 meters across swath widths of 10 - 223 km. The spacecraft is equipped with a robust power system that includes solar arrays generating around 2.28 kW of power and a 70 V bus architecture. For data handling, RISAT-1A includes a Solid State Recorder (SSR) with a capacity of more than 300 Gbit and supports high-speed payload data transmission in the X-band at 640 Mbit/s, while Telemetry, Tracking and Command (TT&C) is managed via the S-band. Built using a largely indigenous industrial supply chain, the satellite reflects ISRO’s growing expertise in the development of advanced radar payloads and space-grade electronics. RISAT-1A operates in a sun-synchronous orbit at an altitude of 524.87 km with a Local Time of Ascending Node (LTAN) around 6:00 AM, providing consistent illumination conditions for repeat observations. 46) 47) 50) 51) 52)
Launches
Spacecraft | Launch Date (UTC) | Spaceport | Orbit | Details |
|---|---|---|---|---|
RISAT 1B (EOS 09) | May 18, 2025, at 00:29 | SDSC (Satish Dhawan Space Center) at SHAR (Sriharikota), India | Sun-synchronous orbit, with an altitude of approximately 529 km | Launch failed due to a drop in chamber pressure in the motor case |
RISAT-1A (EOS 4) | February 14, 2022, at 00:29 | SDSC (Satish Dhawan Space Center) at SHAR (Sriharikota), India | Sun-synchronous orbit, with an altitude of approximately 525 km, and an inclination of 97.5º | Launch Successful |
RISAT-1 | April 26, 2012, at 00:17 | SDSC (Satish Dhawan Space Center) at SHAR (Sriharikota), India | Sun-synchronous near-circular dawn-dusk orbit, with an altitude of approximately 536 km, and an inclination of 97.5º | Launch Successful |
Orbit
Sun-synchronous near-circular dawn-dusk orbit, altitude = 536 km, inclination = 97.552º, period = 95.49 minutes, LTAN (Local Time on Ascending Node) at 6 hours and 18 hours. The revisit period is 25 days with an advantage of a12 day inner cycle in the CRS (Coarse Resolution ScanSAR) mode. Global coverage is achieved twice in the revisit cycle, once by a set of descending passes and next by a set of ascending passes, as SAR is a microwave payload with no illumination constraints.
RF Communications
An onboard data storage capability of 300 Gbit is provided. The data downlink is in X-band with a maximum data rate of 640 Mbit/s on two polarisations (320 Mbit/s RHCP and 320 Mbit/s LHCP) modulated on the same carrier (QPSK modulation).
The ISTRAC (ISRO Telemetry, Tracking and Command Network) is providing data acquisition and TT&C services through an integrated network of ground stations at Bangalore, Lucknow, Sriharikota, Port Blair, Thiruvananthapuram, Mauritius, Bearslake (Russia), Brunei and Biak (Indonesia) with a multimission SCC (Spacecraft Control Center) at Bangalore, India.
Mission Status
• May 18, 2025: ISRO’s PSLV-C61 rocket carrying the EOS-09 (RISAT-1B) satellite was launched from the Satish Dhawan Space Centre (SDSC), Sriharikota, India at 00:29 UTC. The mission failed to reach its intended orbit due to a malfunction in the rocket’s first stage, attributed to a drop in chamber pressure in the motor case. The launch, ISRO’s 101st and the 63rd for the PSLV, proceeded normally through the first two stages before the failure occurred approximately six minutes after liftoff from the Satish Dhawan Space Centre. The loss resulted in the failure to deploy the over-1,600 kg radar imaging satellite, which was intended for reconnaissance and border monitoring. 45) 49)
• February 14, 2022: RISAT-1A (EOS 4) was launched at 00:29 UTC from the Satish Dhawan Space Centre (SDSC), Sriharikota, India, aboard ISRO's Polar Satellite Launch Vehicle (PSLV-C52). 47)
• April 26, 2012: RISAT-1 was launched at 00:17 UTC from SDSC (Satish Dhawan Space Center) at SHAR (Sriharikota in Andhra Pradesh, on the east coast of India) on the PSLV-C19 vehicle. On this flight, the PSLV-XL version was used with six extended strap-on motors (PSOM-XL), each carrying 12 tons of solid propellant 7) 8). PSLV-C19 was the first PSLV-XL to be launched from the FLP (First Launch Pad) of SDSC. 48)
• March 31, 2017: Due to the fragmentation event, RISAT-1 was declared non-operational on 31 March 2017.44)
• September 30, 2016: RISAT-1 experienced a fragmentation event between 2:00 and 6:00 GMT due to an unknown cause. The spacecraft had been on-orbit for 4.4 years and was in a 97.6° inclination, 543 by 539 km orbit at the time of the event. 11) Over 12 fragments were observed initially by the SSN (Space Surveillance Network). At the time, this event was categorised as an anomalous separation of multiple high area-to-mass ratio debris. Events like this are sometimes referred to as a shedding event.
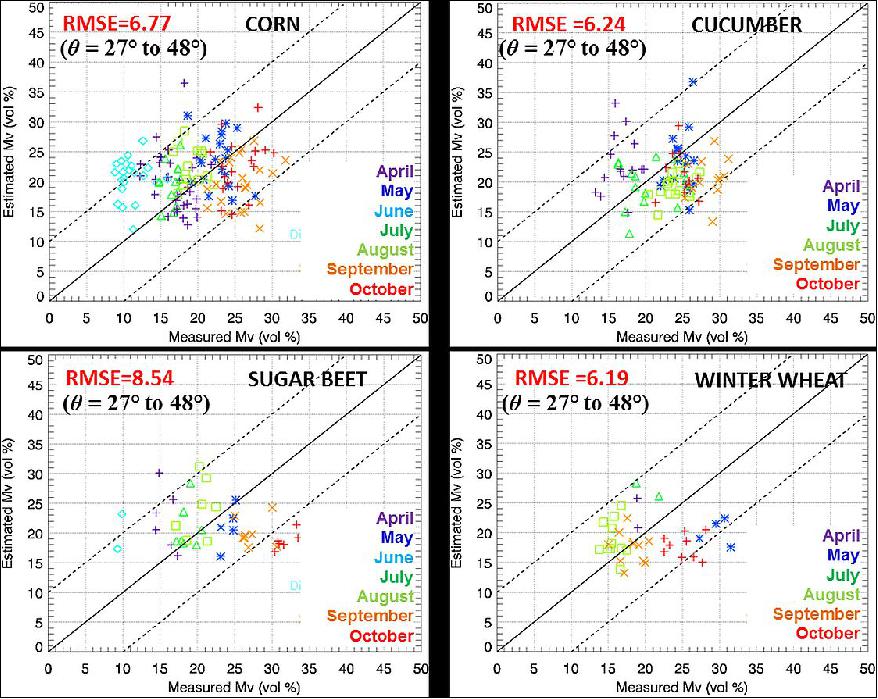
• August 2015: The capability of RISAT-1 hybrid PolSAR (Polarimetric Synthetic Aperture Radar) to estimate soil moisture (under vegetation) was assessed within the agricultural region of Wallerfing in Lower Bavaria, Germany. A novel methodology based on a hybrid polarimetric decomposition together with a surface component inversion is developed to retrieve surface soil moisture. The model-based, hybrid decomposition technique is used assuming a randomly oriented vegetation volume to obtain the surface scattering component. After vegetation removal, the surface scattering component is inverted for soil moisture by comparison with the surface scattering component, modeled by the Extended Bragg (X-Bragg) model including a depolarisation term. The developed algorithm is applied on multi-temporal hybrid polarimetric C-band RISAT-1 data acquired from April to October 2014. The estimated soil moisture values indicate an overall RMS (Root Mean Square) error of 6.2 to 8.5 volume percent, accounting for the entire growing season and four different plant types. 14)
- Validation with in situ measurements: The estimated soil moisture from SAR is validated with corresponding ground measured soil moisture FDR (Frequency Domain Reflectometry) probe measurements for quantitative assessment of the performance of the developed algorithm. The average of the measured soil moisture on ground has been compared with a 13 x 13 pixels average of the hybrid PolSAR-derived soil moisture for each sampling location. Within the box of 13 x 13 pixels, a validity criterion of 5% inversion rate has been used to remove outliers from the validation. The validation for both, bare and vegetation covered soils (from April to October) and for four different plant types are shown in Figure 13.
• August 2015: Radar-based remote sensing has made an impressive beginning in ISRO. A series of programs on radar-based remote sensing are being lined up. They are: 15) ScatSat-1: Ku-band scatterometer to be launched in 2016; OceanSat-3: Ku-band scatterometer to be launched in 2017/2018; RISAT-1A and RISAT-1B: RISAT-1 repeat to be launched in 2018; NISAR (NASA-ISRO SAR): L-band and S-band SweepSAR mission to be launched in 2020.
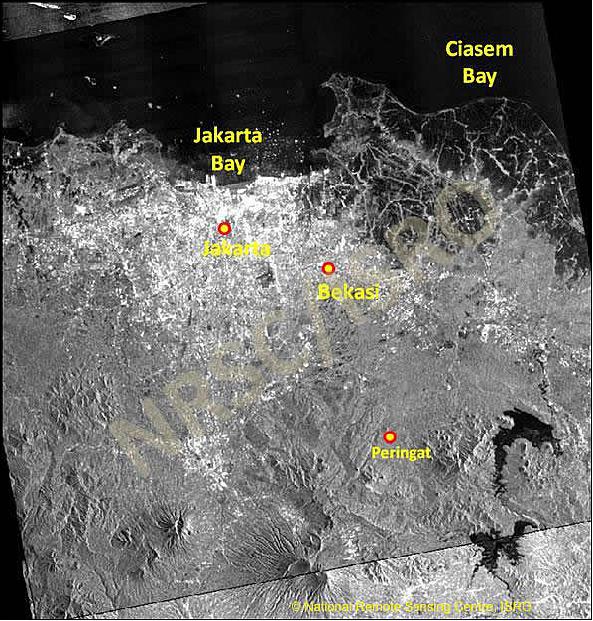
• February 12, 2015: Heavy rain hit Indonesia's capital. Several areas of the city were inundated. In response to the EOR (Emergency Observation Request) triggered by Sentinel Asia authorities, NRSC acquired RISAT-1 MRS mode satellite data on Feb 12, 2015, and provided the dataset to the Sentinel Asia secretariat and concerned authorities. 17)
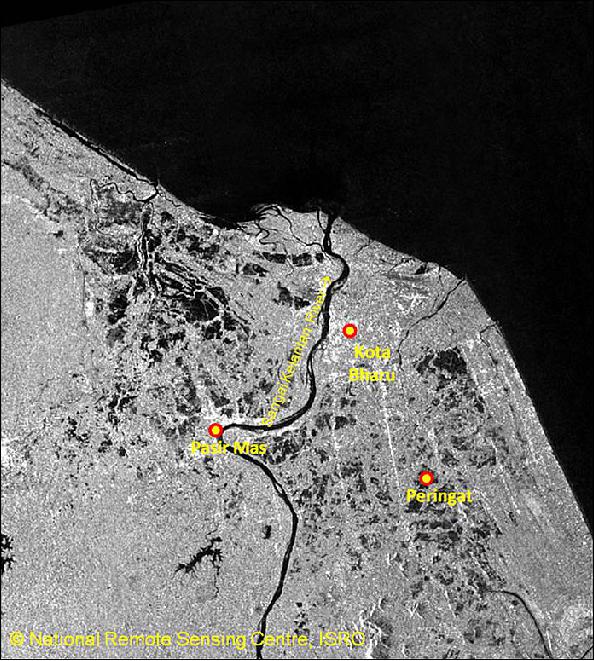
• December 31, 2014: Heavy Rainfall in parts of peninsular Malaysia during December 16-18, 2014, caused flooding in Kelantan, Pahang and Terengganu states. More than 7,000 people have been evacuated. In response to the EOR (Emergency Observation Request) triggered by the Sentinel Asia authorities. DMSD/NRSC(National Remote Sensing Center) acquired RISAT-1 MRS mode satellite data on December 31, 2014 and provided the dataset to the Sentinel Asia secretariat and concerned authorities. 18)
• November 2014: RISAT-1 is now available for near real time deliveries. RISAT-1 data is being downlinked at KSAT ‘s ground station in Svalbard (SvalSat) and further processed in Tromsø. Due to its north location, the SvalSat ground station is the only commercial station in the world providing worldwide coverage with the shortest possible global delay between actual acquisition stop time and downlink time. With this configuration, KSAT is able to offer RISAT-1 image delivery and value added products worldwide in near real time - typically within 1 hour. Antrix Corporation, which owns the commercial rights of RISAT-1, has granted KSAT the right to schedule acquisitions, download, process, and deliver RISAT-1 imagery to commercial users worldwide. 19)
• Nov. 2014: An experiment for absolute radiometric calibration of 13 beams of RISAT-1 FRS-1 (Fine Resolution Stripmap-1) mode data and 1 beam of RISAT-1 MRS (Medium Resolution ScanSAR) mode data has been carried out using standard point targets. In this experiment, triangular tetrahedral corner reflectors were used as standard point targets and deployed prior to the satellite overpass with precise azimuth and elevation angles in various selected research sites in India. 20) 21)
• The RISAT-1 spacecraft and its payload are operating nominally in 2014. Data can be ordered through NRSC or Antrix Corporation. 24)
• April 2, 2013: RISAT was operated in spotlight mode for the first time. For the first time, RISAT-1 could provide polarimetric data in Spotlight and ScanSAR mode. In addition, RISAT -1 demonstrated polarimetric observations at multiple incidence angles.

• 2013: The RISAT-1 spacecraft and its payload were operating nominally in 2013. 25)
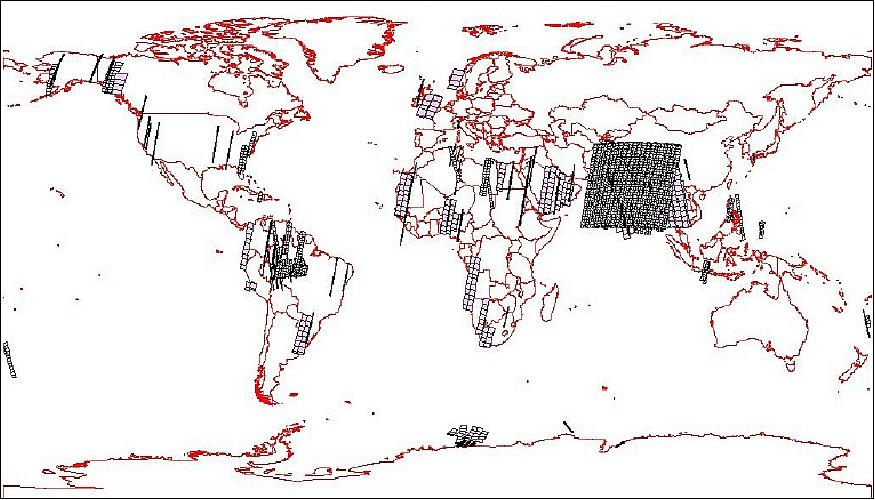
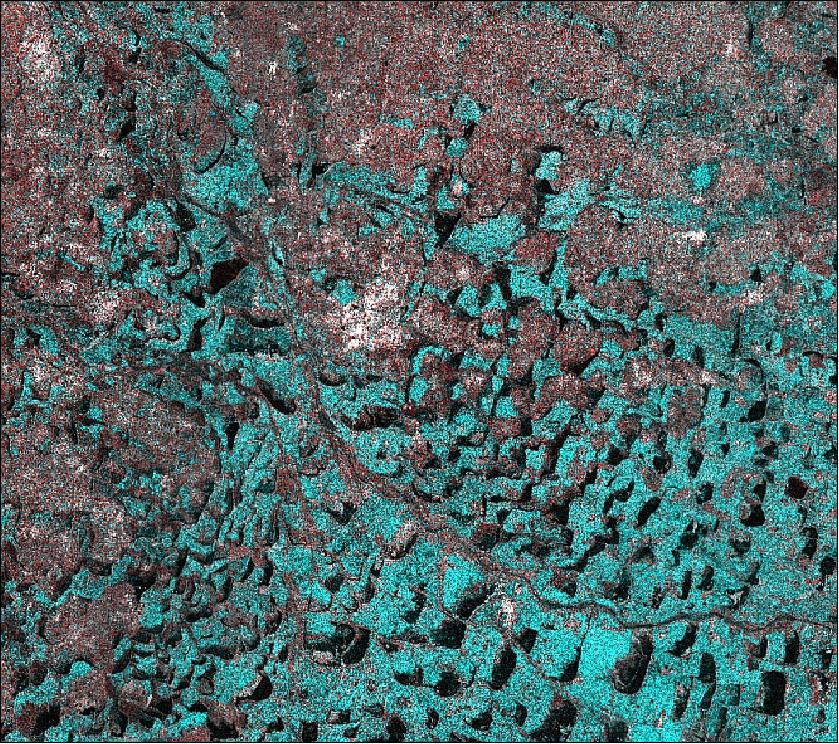
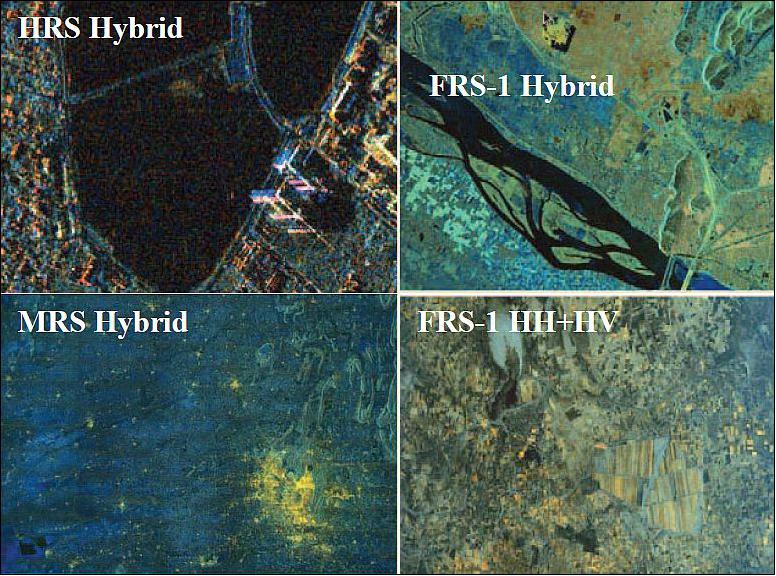
• October 2012: After calibration and validation of the image products, the RISAT-1 image products were released for global users from October 19, 2012 onwards. They are available from NRSC (National Remote Sensing Center), Hyderabad. Typical images, obtained by RISAT-1, are shown in Figure 22. (Ref. 32).
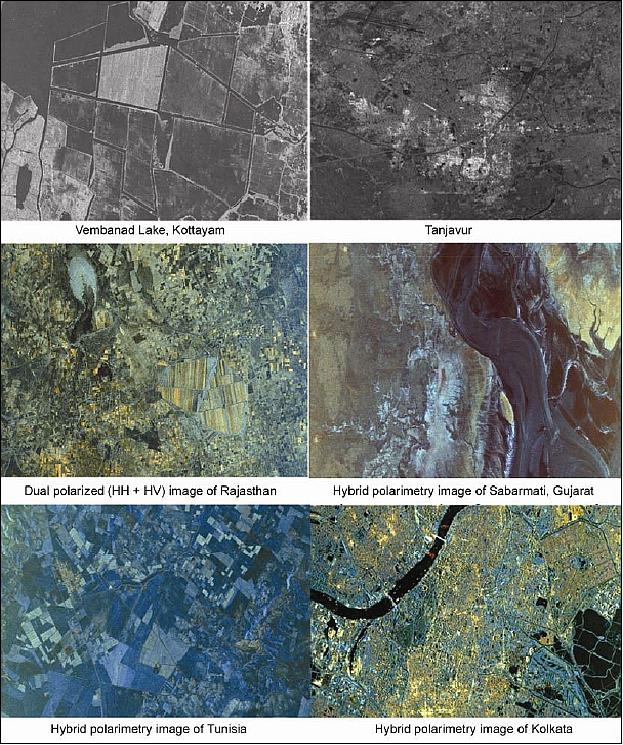
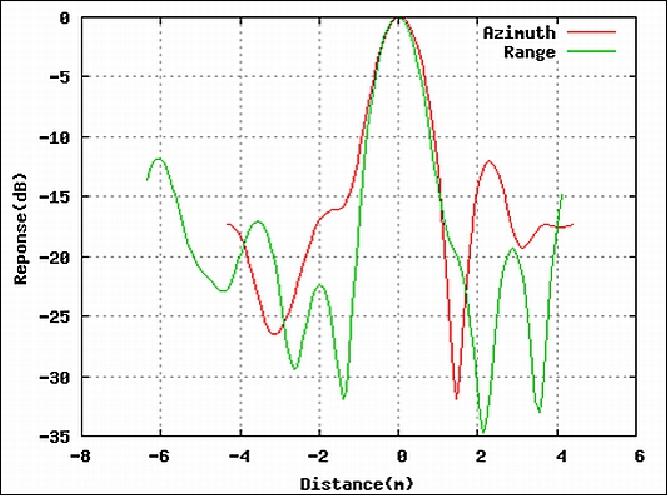
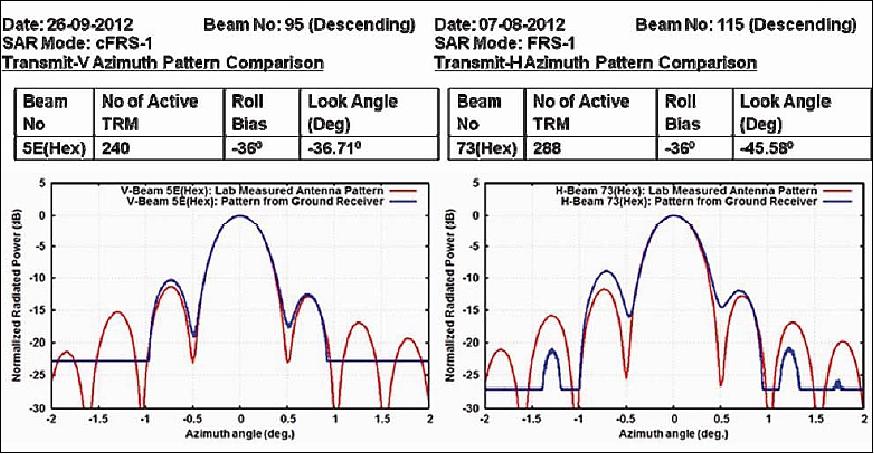
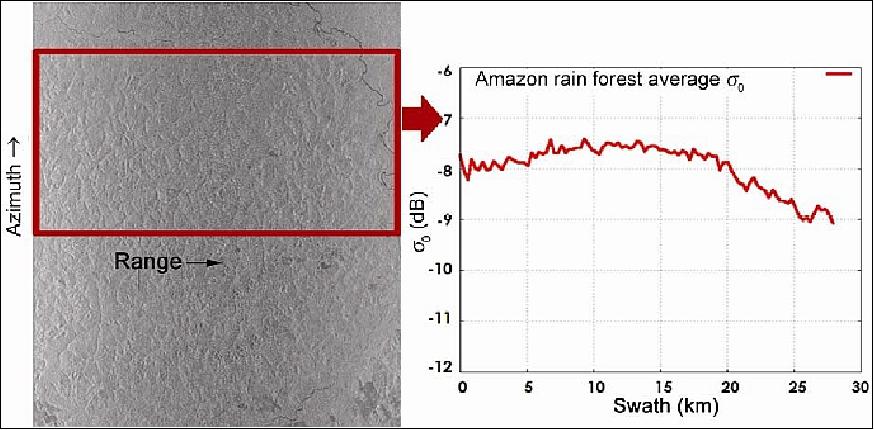
• September 26, 2012: During IOT (In-Orbit Test), azimuth antenna patterns of the RISAT active antenna were measured through a ground receiver. Figure 24 shows close agreement of the measured pattern with the predicted antenna pattern. It is to be noted that during integrated testing, the antenna patterns were predicted based on the limited NF (Near Field) measurements. During IOT only, for the first time far-field antenna patterns were measured. Furthermore, radiometric correction using predicted elevation pattern could result in excellent radiometric balance over the required swath within ± 0.5 dB. Both the above observations led to confidence in achieving calibration of the RISAT–SAR system using a single corner reflector (Ref. 32). The performance of calibration is shown in Figure 25 for an FRS-1 mode image over the Amazon rainforest. The reported average sigma naught (σο ) over the Amazon rainforest is –7.5 dB. The calibrated average estimated σο from RISAT-1 is close to the reported number.
• August 12, 2012: Eclipse operations: Due to the dawn/dusk orbit of RISAT-1, the orbital eclipse phase is only seasonal (May 2 – August 12, 2012) with a maximum eclipse duration of about 22 minutes (around June 23, when the sun declination was 23.5°); this is unlike the other IRS missions of ISRO where an eclipse is encountered in every orbit. Regular monitoring and management of the solar array, the battery resources, and the thermal control of the on-board systems were carried out to match with the variable eclipse periods and seasonal variations. Daily uploads of the eclipse start time and duration to the on-board systems were necessary for the initiation of the SADA (Solar Array Drive Assembly) auto capture in case of panel non-tracking during the sunlit period. During an orbital eclipse period, the SAR payload operation is avoided as the full load of the payload along with the mainframe is required to be supported only by the battery (Ref. 42).
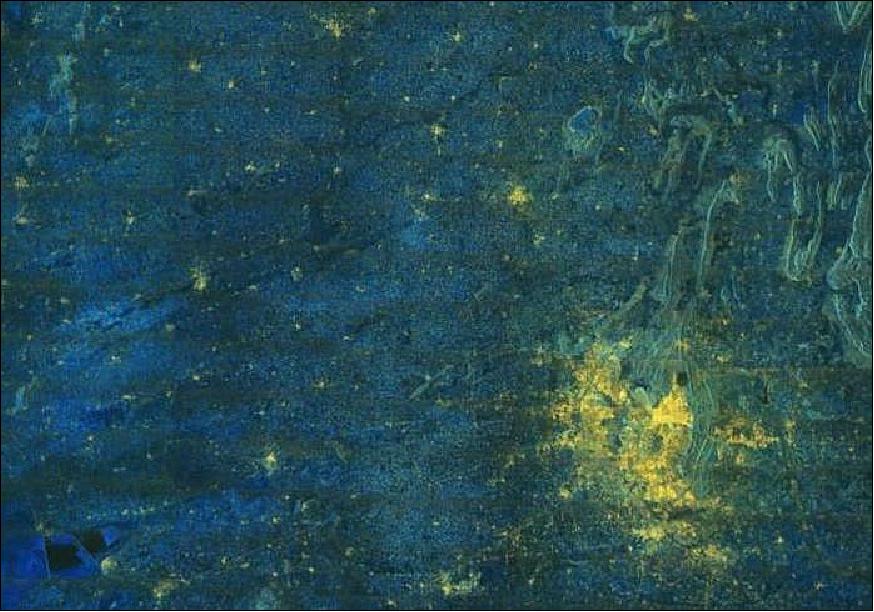
• May 2012: The RISAT-1 SAR instrument observed the first imagery over India (Figure 26). 26) 27)

• April 29, 2012: The RISAT-1 SAR payload commissioning-related exercises started from 29 April 2012 onwards after the mission orbit of 536 km was reached. Unlike other satellites, for the first time in RISAT-1, a single X-band carrier was being used to transmit V and H polarisation data in RHCP and LHCP modes. Thus, systematic characterisation of the ground reception systems was carried out with data handling tests using RHCP mode alone in one pass, LHCP mode alone in another pass and then both together in yet another pass. The SAR payload commissioning started in a planned manner by operating the payload in FRS-1 (Fine Resolution Stripmap-1) mode with single beam operation and then MRS/CRS (Medium and Coarse Resolution ScanSAR) modes with multiple beam operations (Ref. 42).
The near beam(s) and far beam(s) energising exercises were conducted for various modes and their power profiles were characterised in-orbit. About 27 test cases, including on-board calibration operations were exercised during the in-orbit commissioning of SAR payload. The SSR (Solid State Recorder) was also commissioned with recording and downloading of the PN sequence, followed by imaging sessions that required SSR recording.
• April 27, 2012: The spacecraft's propulsion system was used in 4 orbital maneuvers to raise the altitude to its nominal 536 km near-circular orbit. 28) 29) The launch of PSLV-C19 had placed RISAT-1 into a required intermittent polar orbit of 470 km x 480 km (in view of the large spacecraft mass of 1858 kg). The planned 4 orbital maneuvers used 37 kg of on-board fuel to reach the nominal orbit of 536.6 km. Star trackers were activated and normalised for updates, and GOODS was initialised after confirming SPS tracking. Thermal controls were fine-tuned, and the spacecraft entered normal mode with the star sensor in loop, later transitioning to star Kalman filter mode. On-board safety features, including safe mode, wheel logic, solar array failure detection, and battery temperature control, were enabled. In orbit 2, with visibility from Svalbard, Lucknow, Bangalore, Mauritius, and Troll, spacecraft normalisation continued. Wheels ran at 3500 rpm for friction estimation, then adjusted to 1500 rpm in orbit 3. After orbit injection, solar panels and SAR antennas deployed automatically via timers. The initial acquisition occurred over the Troll ground station using pre-loaded quaternions, followed by three-axis attitude acquisition via ground commands (Ref. 42).
Sensor Complement
The payload consists of the single SAR instrument. The principal motivation behind this development is to provide SAR imagery which will complement and supplement the optical imagery of ISRO spacecraft. During monsoon periods and also for the regions which are perennially under cloud cover, RISAT will be the sole source of data when operational. The choice of the C-band frequency of operation and the RISAT-1 SAR capability of simultaneous imaging in both co- and cross-polarisation, will enable monitoring in a wide field of applications such as: vegetation, agriculture, forestry, soil moisture, geology, sea ice, coastal processes, and man-made object identification. In addition, RISAT-1 will also be used for disaster monitoring services. 30) 31)
The RISAT-SAR instrument supports a variety of resolution and swath requirements. Both conventional stripmap and ScanSAR modes are supported, with dual polarisation mode of operation. Additionally a quad polarisation stripmap mode is provided for availing additional resource classification. In all these modes, resolutions from 3 to 50 m can be achieved with swath ranging from 25 to 223 km. On experimental basis, a sliding spotlight mode is also available. In all the imaging modes, a novel polarimetry mode called circular or hybrid polarimetry can be exercised seamlessly. The system is capable of imaging on either side of the flight track depending upon prior programming of the satellite.
The payload is based on active antenna array technology. Crucial technology elements like C-band MMICs, TR module and miniaturised power supplies have already been developed in India. A pulsed mode near-field test facility has also been developed in-house in order to characterise the payload in the integration laboratory itself. 32)
RISAT-SAR
The RISAT-SAR instrument, designed and developed at ISRO/SAC (ISRO/Space Applications Center), Ahmedabad, India. The RISAT-SAR is configured on a dual receiver concept providing identical resolution in both simultaneous co- and cross-polarisation operation support modes (Table 4). The RISAT-SAR instrument consists of two broad segments, namely:
- The deployable SAR antenna subsystem
- The RF and baseband subsystems mounted on the satellite deck.
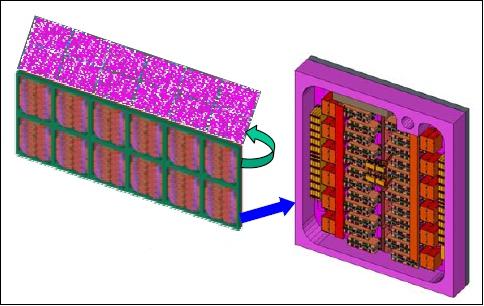
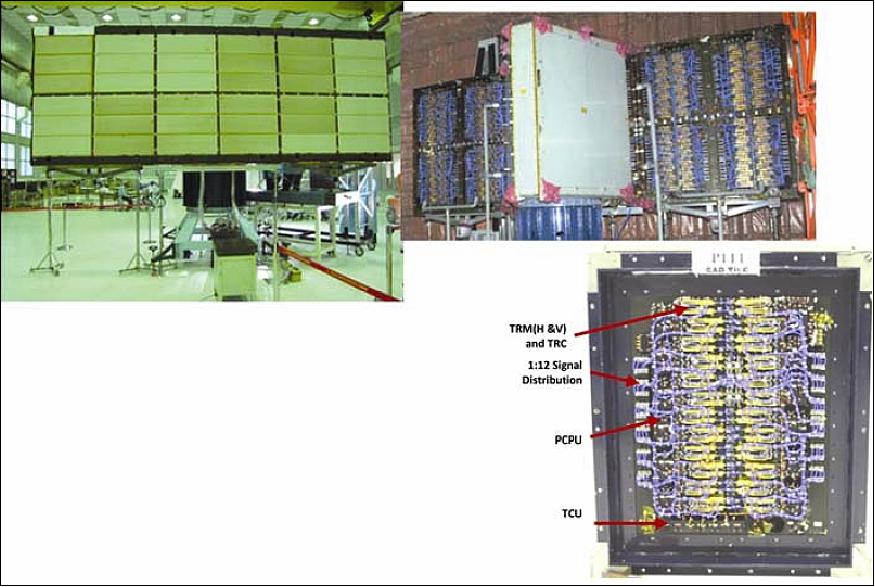
SAR antenna subsystem: The Earth-facing side of the active phased array antenna is a broadband dual polarised microstrip radiating aperture. The antenna consists of three deployable panels, each panel of 2 m x 2 m in size. Each panel in turn consists four tiles of size 1 m x 1 m with 24 x 24 radiating elements. In each tile, all the 24 x 24 radiating elements are grouped into 24 groups, each group consisting of 24 elements spread along azimuth directions which are fed by two stripline distribution networks feeding for V and H polarisation. Each of these groups of 24 radiating elements are catered to by two functionally separate T/R (Transmit/Receive) modules, feeding two separate distribution networks for V and H operation with the same radiating patches.
The peak RF power, fed by each T/R module, is 10 W at a duty cycle of ~7-8%. The two functionally separate T/R modules are mounted in the same physical enclosure, sharing the same power supply and T/R control electronics. This sort of grouping also enables phase steering in the elevation direction. All the 24 T/R modules on one tile are controlled by one TCU (Tile Control Unit). The T/R modules and TCU are mounted on the backside of the antenna. The mechanical configuration of the complete antenna, grouped into three panels per twelve tiles, and a detailed view of the basic tile structure, are shown in Figure 27.
An extensive onboard calibration facility is provided with the help of a set of CAL switches and dedicated distribution networks for calibrating transmit and receive paths of each of the T/R modules separately.
Parameter | RISAT-1 | RISAT-1A (EOS-04) | |||||||
|---|---|---|---|---|---|---|---|---|---|
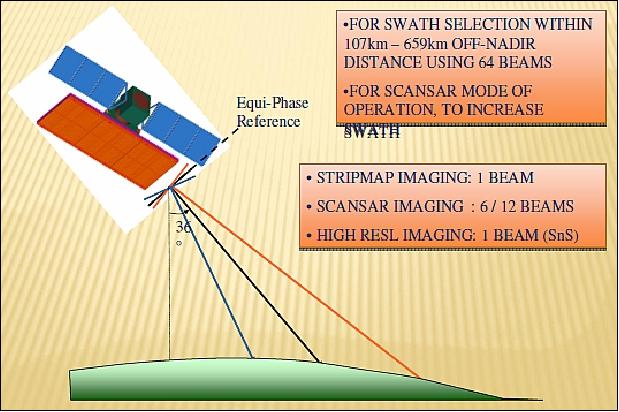
Swath coverage | Selectable within 107 – 659 km off-nadir distance on either side | 10 km (Spot), 25 km (FRS‑1), 160 km (MRS), and 223 km (CRS) | |||||||
Incidence angle coverage | 12º – 55º | 18º – 50º (approximate, varies by mode) | |||||||
Operating mode | Polarisation mode | Spot, MRS (8 beams), CRS (12 beams), plus Full/Half/Quad polarization options | |||||||
Single Pol | Dual Pol | Circular (Hybrid) Polarimetry | Quad Pol | Full | Hybrid | Dual | Circular polarimetry (TX: CP; RX: V and H) | Quad | |
HRS | 1 m(Azimuth) x 0.67 m (Range) resolution, 10 km x 10 km (10 x 100 km Experimental) Spot |
| Slant-range resolution 1 – 3 m; ground range varies with incidence; detailed beam coverage | ||||||
FRS-1 resolution & swath | 3 m(Azimuth) x 2 m (Range) resolution, 25 km swath |
| Modes with bandwidth adjustments, resolutions 2.5–4 m with swath ~25–30 km | ||||||
FRS-2 resolution & swath |
|
| 3 m(Azimuth) x 4 m (Range) resolution, 25 km swath | 9 m(Azimuth) x 4 m (Range) resolution, 25 km swath | Lower resolution modes available, swath and resolution adapted per mode | ||||
MRS resolution & swath | 21-23 m (Azimuth) x 8 m (Range) resolution, 115 km swath |
| Multibeam modes with 8 beams, spatial resolution around 20 m, swath ~100+ km | ||||||
CRS resolution & swath | 41-55 m (Azimuth) x 8 m (Range) resolution, 223 km swath |
| Multibeam 12 beams, lower resolution (~40–55 m), swath up to 220+ km | ||||||
Minimum backscatter (σ0) | HRS: -16 dB |
| HRS: -16 dB | ||||||
Parameter | RISAT-1 | RISAT-1A (EOS-04) | ||||||
|---|---|---|---|---|---|---|---|---|
Frequency | 5.350 GHz (C-band) | 5.350 GHz (C-band) | ||||||
SAR antenna type | Printed antenna | Printed antenna | ||||||
Antenna size | 6 m (along-track) x 2 m (cross-track) | 6 m × 2 m approx | ||||||
Side lobe level | -13 dB (azimuth), -13 dB (elevation) | -13 dB azimuth and elevation | ||||||
No. of TR modules | 288, each with 10 W peak power | 288 TR modules, >10 W peak power | ||||||
Pulse width | 20/10 µs | 20/10 µs | ||||||
Average DC Input power | 1.8-3.9 kW (average DC input power) | 2.0–3.9 kW | ||||||
Operating mode | HRS | FRS-1 | FRS-2 | MRS/CRS | HRS | FRS-1 | FRS-2 | MRS/CRS |
Chirp bandwidth | 225 MHz | 75 MHz | 37.5 MHz | 18.75 MHz | 225 MHz | 75 MHz | 37.5 MHz | 18.75 MHz |
Sampling rate | 250 MHz | 83.3 MHz | 41.67 MHz | 20.83 MHz | 250 MHz | 83.3 MHz | 41.67 MHz | 20.83 MHz |
PRF (Pulse Repetition Frequency) | 3500 Hz ± 200 Hz | 3000 Hz ± 200 Hz | 3000 Hz ± 200 Hz | 3000 Hz ± 200 Hz | 3500 Hz ± 200 | 3000 Hz ± 200 Hz | 3000 Hz ± 200 Hz | 3000 Hz ± 200 Hz |
Data quantisation | 2/3 BAQ | 2/3/4/5/6 bit BAQ | 2/3 BAQ | 2/3/4/5/6 bit BAQ | ||||
Data rate (max) | 739 Mbit/s (single pol.) | 556 Mbit/s (single pol.) | 564 Mbit/s | 142 Mbit/s (single pol.) | 740 Mbit/s (single pol), dual pol 1480 Mbit/s | 556 Mbit/s (single pol.) | 564 Mbit/s | 142 Mbit/s (single pol.) |
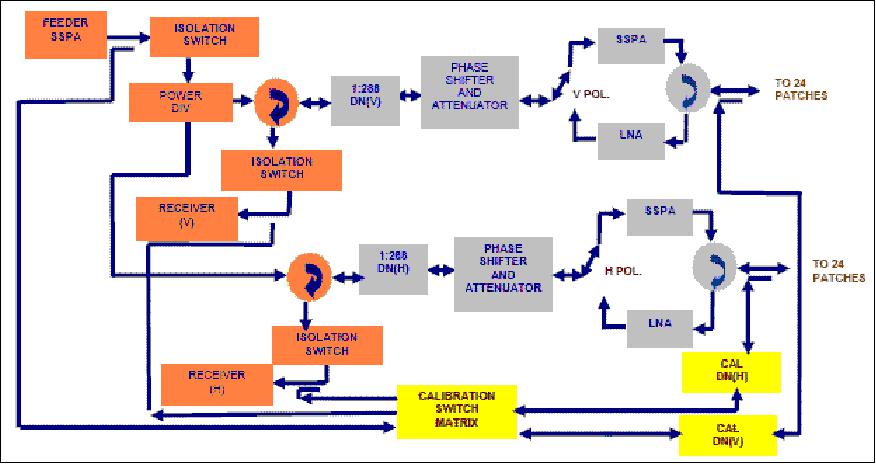
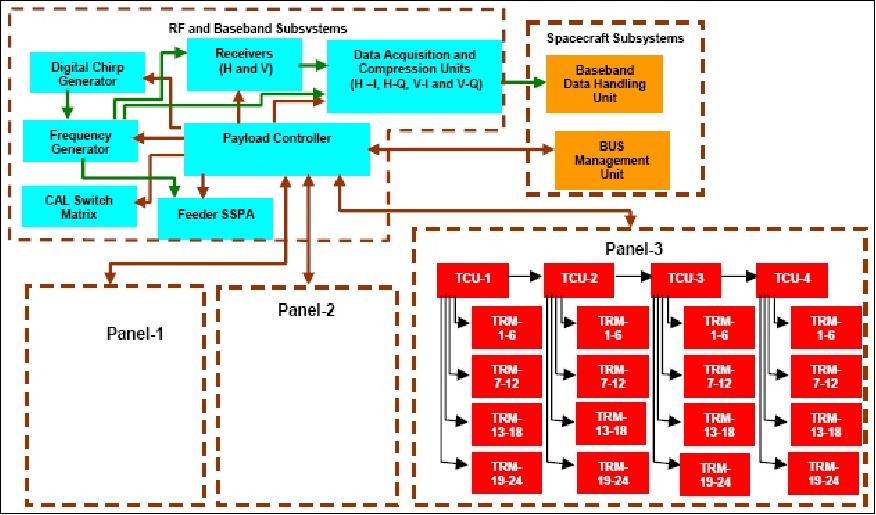
RF and baseband subsystems: Two separate chains of receiver and data acquisition and compression system cater to simultaneous operation in two polarisations. However, the feeder SSPA, the frequency generator, and the digital chirp generator are common to both of the polarisation chains. All subsystems are configured with 100% redundancy. The feeder SSPA transmits a chirped pulse of 20 µs to the active antenna during the transmit period. The flexible digital chirp generator provides the expanded pulses of four different bandwidths of 225, 75, 37.5 and 18.75 MHz for operation in the various imaging modes. The analog base band output is fed to frequency generator unit, which in turn generates chirped carrier at 5.35 GHz. The chirped carrier is amplified through feeder SSPA and fed to TR modules. The frequency generator generates IF, LO and frequency reference for data acquisition subsystems.
Its configuration of dedicating separate set of power amplifiers for V and H polarisation transmission, has made it a unique spaceborne Hybrid Polarimetric Sensor. The other operational spaceborne SAR instruments like on Radarsat-2, TerraSAR-X or COSMO Skymed, are equipped with specific linear polarimetric mode which is usually operated within the restricted coverage of 20° to 30° incidence angle, because of doubling of PRF (Pulse Repetition Frequency) and usually a specific imaging mode is dedicated for linear polarimetric operation. However, in the hybrid polarimetric operation of RISAT-1, signal is transmitted in circular polarisation and the received signal is digitised in two orthogonal polarisation chains. This ensures conventional PRF of operation without any increase in data rate. Hybrid polarisation in RISAT-1 can be activated for any imaging mode (spotlight/stripmap/ScanSAR) and can be operated over any incidence angle ranging from 12° to 55°.
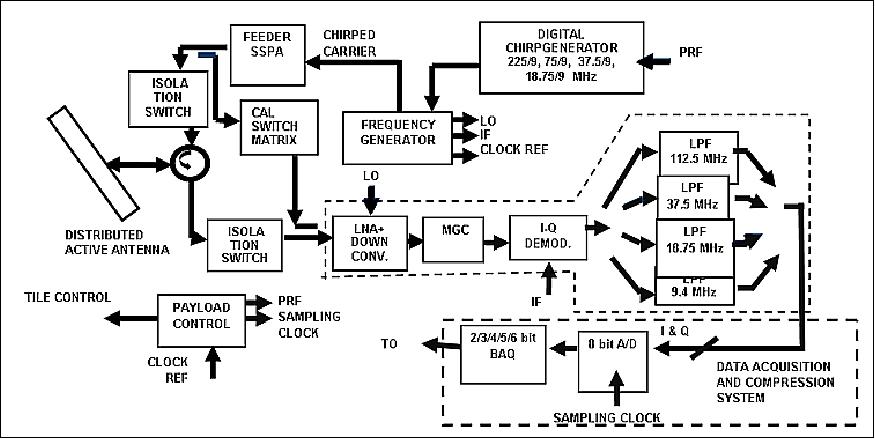
The combined signal from active antenna is down-converted to IF which is subsequently I-Q detected prior to digitisation. No provision of onboard range compression is kept and range compression needs to be carried out on ground. The baseband I-Q detected receive signal is suitably band limited to maximise the SNR by a set of four selectable I-Q filters. The first stage of the data acquisition unit is an 8 bit digitiser. RISAT-SAR provides the unique option of user choice of a seamless BAQ (Block Adaptive Quantization) option from 2-6 bits depending upon the application requirements. Each of the I and Q channels are separately digitised, compressed and formatted with identical repetition of common auxiliary parameters and data is taken out from each I-Q channel as 16 bit parallel stream (quantised data) at a constant rate of 31.25 MHz. The choice of antenna size put a constraint in the selection of the PRF (Pulse within a range of 2800-3700 Hz, a consequence from both the Doppler sampling requirement and range ambiguity considerations. 33) 34)

Operating modes of RISAT-SAR
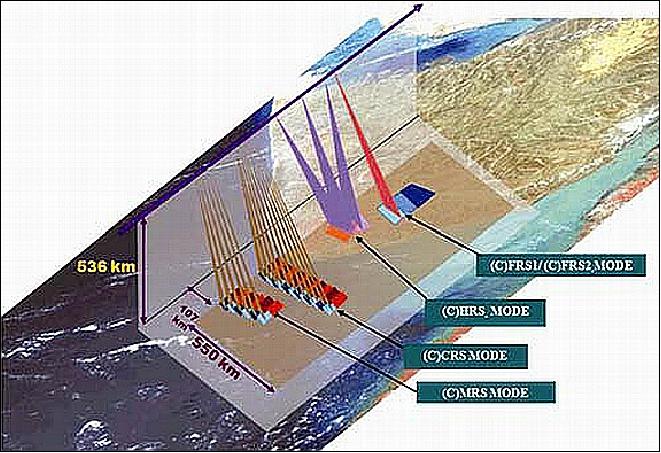
The RISAT-SAR system is designed to provide a constant swath for all elevation pointing and almost near-constant minimum radar cross section performance. The following operational modes are defined:
• FRS-1 (Fine Resolution Stripmap-1): 3 m x 2 m (Az x Range) resolution, 25 km swath, co- and/or cross polarisation and hybrid polarimetry.
• FRS-2 (Fine Resolution Stripmap-2): 6 m x 4 m (Az x Range) resolution, 25 km swath, Quad polarisation;
3 m x 4 m (Az x Range) resolution, 25 km swath in hybrid polarimetry.
• MRS (Medium Resolution ScanSAR): 25 m x 8 m (Az x Range) resolution 115 km swath, co- and/or cross polarisation or in hybrid polarimetry. The MRS mode is configured with 6 antenna beam pointings in elevation.
• CRS (Coarse Resolution ScanSAR): 50 m x 8 m (Az x Range) resolution, 223 km swath, co and/or cross polarisation or in hybrid polarimetry. The CRS mode uses 12 beams in the elevation.
• HRS (High Resolution Spotlight): < 2 m resolution, a spotlight target of 10 km (azimuth) x 10 km (ground range ), in co- and/or cross polarisation or in hybrid polarimetry.
HRS features an experimental capability to increase the azimuth extent up to 100 km. However, all the images are available in single-look only except in CRS mode which offers up to 2 range looks.
In the ScanSAR mode, the antenna beam pointing switches electronically in the elevation direction to cover adjacent sub-swaths (swath covered by individual beams) in regular intervals of time, referred to as burst time.
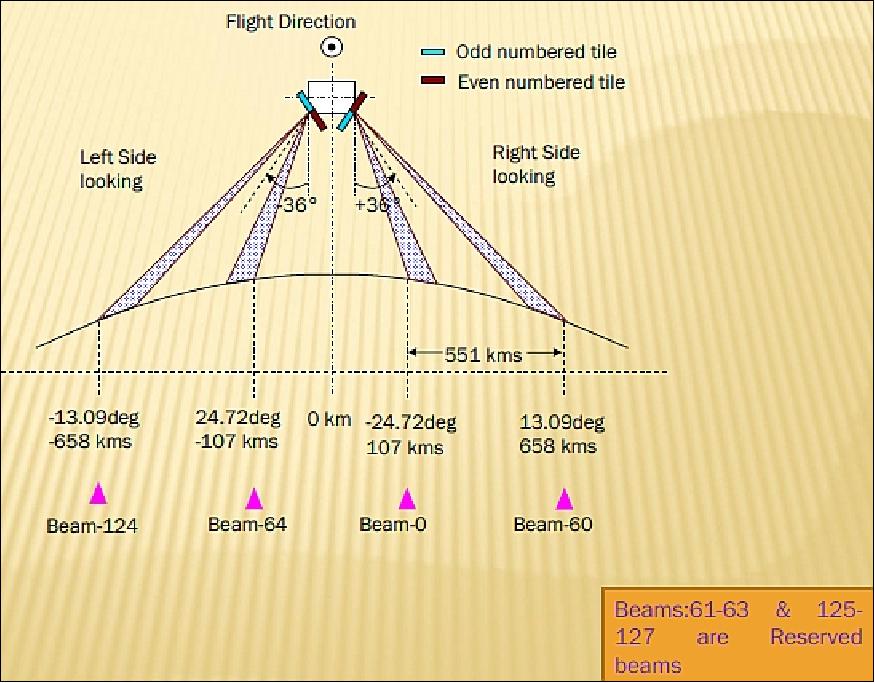
RISAT-SAR observations may be performed on either side of the ground track (left or right looking capability) by roll-tilting of the antenna by ±36º. However, this tilting feature is limited to one side per orbit.
RISAT-SAR operates with basic elevation beam width of 2.2º -1.5º over a total ground distance of 550 km starting from off nadir distance of 107 km. Within this 550 km operating ground range, the image products will be fully qualified. The off-nadir look angle is 11.5-49.5º.
Integrated SAR Antenna
The antenna is a major RISAT-1 element supporting a total of 126 beams. The accuracy of pointing and knowledge of the pattern has a definite bearing on the radiometric performance of the RISAT-SAR instrument and the overall mapping requirements. Hence, an extensive laboratory antenna pattern measurement program is undertaken prior to integration. The measurement concept is based on the PNF (Planar Near-Field) concept as shown in Figure 36. This involves the transmit and receive pattern measurement in both polarisations using the RISAT-SAR pulse.
The measurement will be carried out under zero-G conditions. The proposed measurement scheme will ensure the mechanical references are kept the same for the 4 different pattern (Tx-V, Tx-H, Rx-V, Rx-H) measurements. The scanner is basically capable of scanning a probe in x-y plane of the clean scan area of 8 m x 4 m. However, only a limited z-axis scan capability of 20 cm is provided. In realistic terms, the scan plane has to be made parallel to the actual antenna plane. A laser tracking instrument is being used to provide the plane information of the antenna plane.
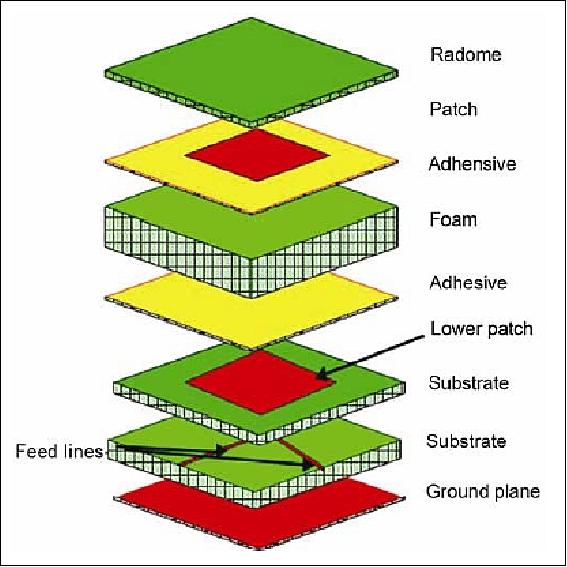
The Earth-facing side of the active antenna is a broadband dual polarised microstrip radiating aperture. The active antenna system consists of three deployable panels, each of 2 m x 2 m size. Each of the panels is subdivided into four tiles of 1 m x 1 m in size (Figure 32). Each tile consists of 24 dual polarised linear arrays, aligned along the azimuth direction. Each of the linear arrays, of length 1 m, is basically composed of 20 equi-spaced microstrip patches, EM coupled by two orthogonal strip line networks (Figure 33). Each of these linear arrays is fed by functionally two separate TR modules feeding two separate distribution networks for V and H operation with the same radiating patches. The outer duroid layer also doubles up as a radome and the patches are printed on the inner side of the outer duroid layer. A glass-wool blanket on the antenna isolates it from heating by the Earth as well as solar radiation or from cooling in the absence of solar radiation, when the antenna points away from solar illumination.
The printed antenna is grown on one side of a CFRP (Carbon Fiber Reinforced Plastic) honeycomb plate. The rest of the active antenna electronics is mounted on the other side of this plate. Fast beam switching and beamwidth control is achieved by electronic elevation beam control in the active antenna. Sixty-one (61) beam-pointing positions have been identified to enable imaging anywhere over 550 km region on one side of the subsatellite track, with the best possible performance. Each beam is centered at off-nadir intervals of ~ 9 km. Two additional beams with no pointing (0º with respect to antenna orientation angle, i.e. ± 36º) are defined for two halves of the antenna, 6 m x 1 m each. Therefore, there are 63 beam positions defined for imaging on each side of the subsatellite track. As a result, a total of 126 beams are used for imaging on either side of the track. An option of yaw rotation for left–right imaging would have reduced the requirement of the number of beams by half. But operationally, this option would have an implication on the time for switching to imaging on either side of the track.
The active beam-width in elevation direction is controlled such that for each beam a 25 km swath with near identical σο performance is achieved irrespective of the elevation pointing. Typical σο performance over different off-nadir distances is shown in Figure 34. The TR-modules are switched off in the width direction, equally from the outer edges of the two adjacent tiles to control elevation beam width between 2.48º and 1.67º. Such a strategy has been adopted for elevation beam control for easing out thermal management.
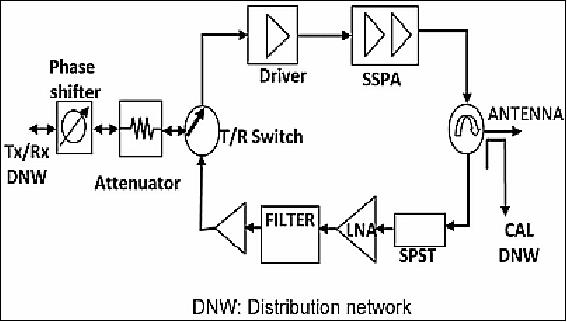
The peak RF power, fed by each TR module, is 10 W at a duty cycle of ~ 7%. These two functionally separate TR modules are housed in two different physical enclosures, sharing the same power supply and TR control electronics (TRC). The basic architecture of a TR module is shown in Figure 35. Phase and amplitude control of the TR module is achieved by 6 bit phase shifter and 6 bit attenuator, which in turn are shared by both transmit and receive paths. Each of the TR modules is extensively characterised over ambient temperature from –10ºC to 60ºC. The LNA (Low Noise Amplifier) of the TR module is protected by a PIN diode switch. At the circulator output a coupler provides the required calibration stimuli. On the tile, two rows of TR modules, each consisting of 12 modules, feed alternate antenna arrays.

Both the TR modules (H and V) and TRC are powered by a miniaturised pulsed EPC (Electronic Power Conditioner) called PCDU (Power Conditioning and Processing Unit). An ASIC (Application Specific Integrated Circuit)-based TRC controls both H and V TR modules and the PCPU. Power sequencing is such that both transmit and receive paths are switched on by power pulsing only, for the required duration in every PRI (Pulse Repetition Interval), in order to conserve power. It not only sequences the smooth operation of TR modules, but also provides requisite temperature compensation of phase and amplitude variation from stored characterisation table. A thermistor voltage from the TR modules provides the requisite input for appropriate reading of LUT (Look-Up Table).
All 24 TR modules on a tile are controlled by one TCU (Tile Control Unit). It provides synchronisation of the TR modules with a master reference. It also provides requisite amplitude and phase correction required on each TR module for appropriate collimation for a particular beam pointing and pattern weighting. No weighting is possible to be provided during transmission as all the TR modules operate in saturation condition. Only on reception, is the weighting applied.
Payload Control and Management
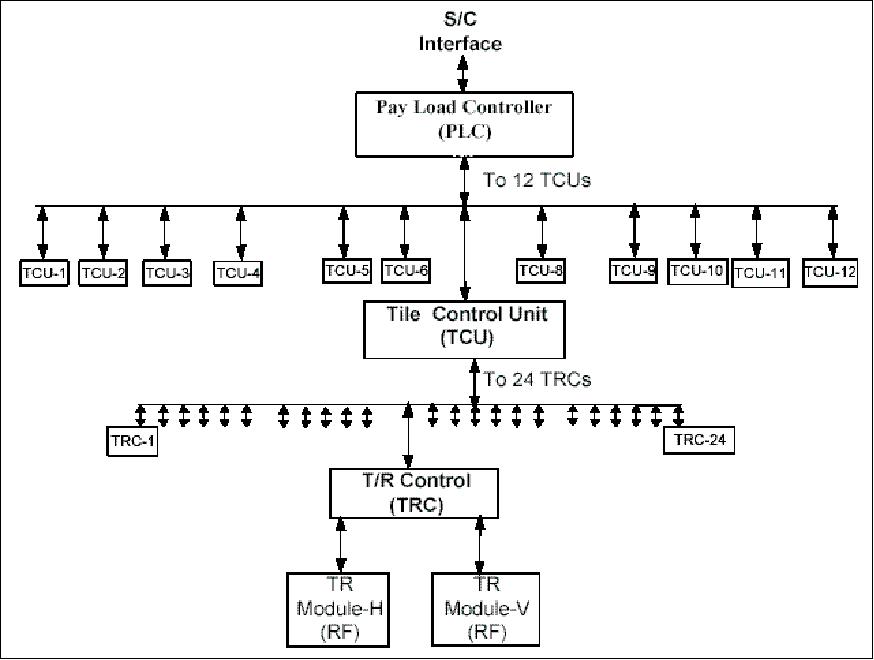
The RISAT-SAR payload is controlled by an array of controllers organised in a three-tier hierarchy as depicted in Figure 37. At the top level of the hierarchy, the complete payload is controlled by a central computer, referred to as PLC (Payload Controller), which interfaces with the RF and baseband subsystems, namely the DCG (Digital Chirp Generator), the V and H receivers, the FG (Frequency Generator), Feeder SSPA (Solid‐State Power Amplifier), CAL (Calibration Switch Matrix) and four DACSs (Data Acquisition and Compression Subsystems). PLC is an autonomous controller with only spacecraft interface being DC Power and a 1553 interface with the BMU (Bus Management Unit) of the spacecraft.
The bit parallel data at the DACU output is directly interfaced with spacecraft's BDH (Baseband Data Handling) unit for further formatting, recording, encryption and transmission. The payload controller in turn controls the active antenna via the tile control units residing in each TCU (Tile Control Unit). The PLC essentially transmits the beam definition command and switching sequence definitions to the active antenna. The TCU controls the beam pointing and the beam setting in a tile via the T/R controller. It also sequences the TRM (T/R Module) power on/off command. The TCU transmits T/R module specific beam shifting, beam weighting and residual corporate feed mismatch compensation related phase and the amplitude coefficients to specific T/R modules. Each of the T/R modules is controlled by corresponding TRC (T/R Controller). Each TRC controls two independent T/R modules where each is dedicated for a polarisation and one PCPU (Power Conditioning and Processing Unit) powering the TRC and two T/R modules. The TRC contains in its memory all the temperature related phase and amplitude calibration data for each T/R module and imparts the corresponding corrections from instantaneous measurement of ambient temperature.
Advanced Digital Subsystems (Technology Introduction)
The introduction of advanced and new digital technology has contributed significantly in the optimisation of the various units of the RISAT-SAR (in size, mass, and power). Most of these digital subsystems, except for the active antenna tile digital electronics, have already been test flown for performance evaluation (on the airborne SAR of ISRO; test flight in November/December 2005).
Apart from design and development of an active antenna based SAR system, the major achievement of the RISAT-1 project has been extensive industrial participation in developing critical technological elements needed for the payload. The TR modules, along with all the MMICs (Microwave Monolithic Integrated Circuit) associated with it have been designed and produced in India. 36) 37)
The miniaturised pulsed EPC (Electric Power Conditioner) for powering the TRMs (T/R module), featuring three different HMCs and planar transformer, has been a feat of Indian industry. The printed antenna aperture has been designed in ISRO and produced by the industry of India. The ASIC, meant for controlling active array antenna elements, has been designed in-house. The notable achievement of RISAT-1 project has been establishment of a novel near field antenna facility, based on time segregation of requisite signal from unwanted echoes, has been designed in-house and built in cooperation of Indian industry, for characterisation of the active antenna.
The SAR antenna employs an active phased array radar because of it's capability in terms of beam steering, multi-beam operations, large bandwidth and high efficiency. Electronic beam steering requires the loading of digital amplitude and phase values to the array of TRMs (Transmit/Receive Modules). For a large array of elements, distributed digital controllers are being used to load the beam characterisation, timing control and serial communication. The hierarchy of the distributed controllers for the active phased array antenna of RISAT is shown in Figure 41 with three levels of hierarchy. The PLC (Payload Controller) is at the top of the hierarchy. The PLC controls 12 distributed TCUs (2nd level). Each TCU controls 24 TRCs (T/R Controllers), representing the 3rd level of the hierarchical structure. 38) 39)
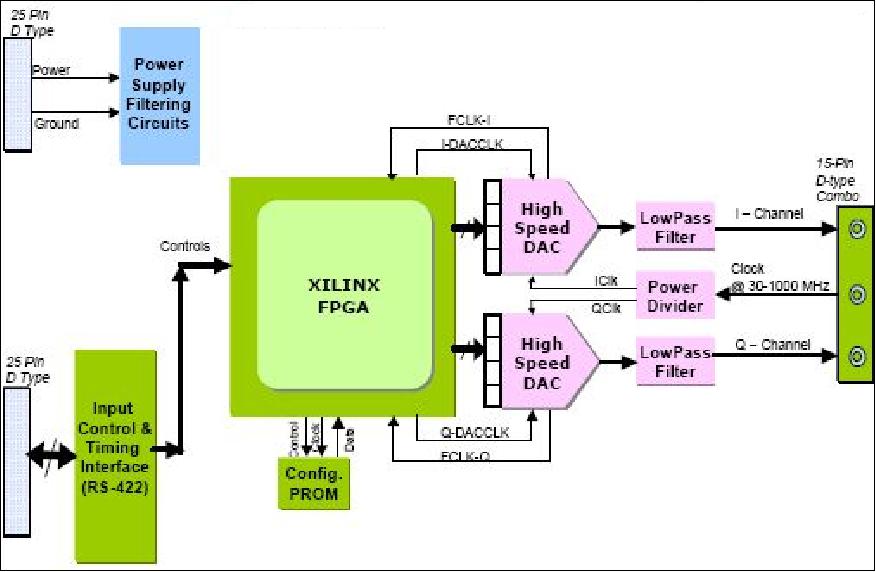
1) Baseband Digital Subsystems
• DCG (Digital Chirp Generator). The DCG hardware consists of 2 identical modules located in the power supply. A DCG device is based on Xilinx Virtex XQVR-600 FPGA synthesisers which transmit the I/Q chirp signal of 0-75 MHz bandwidth using either a PROM look-up table or a direct digital chirp synthesis approach. The output signal is low-pass filtered, vector modulated, multiplied by an appropriate factor and subsequently up-converted in the RF segment to the desired carrier frequency.
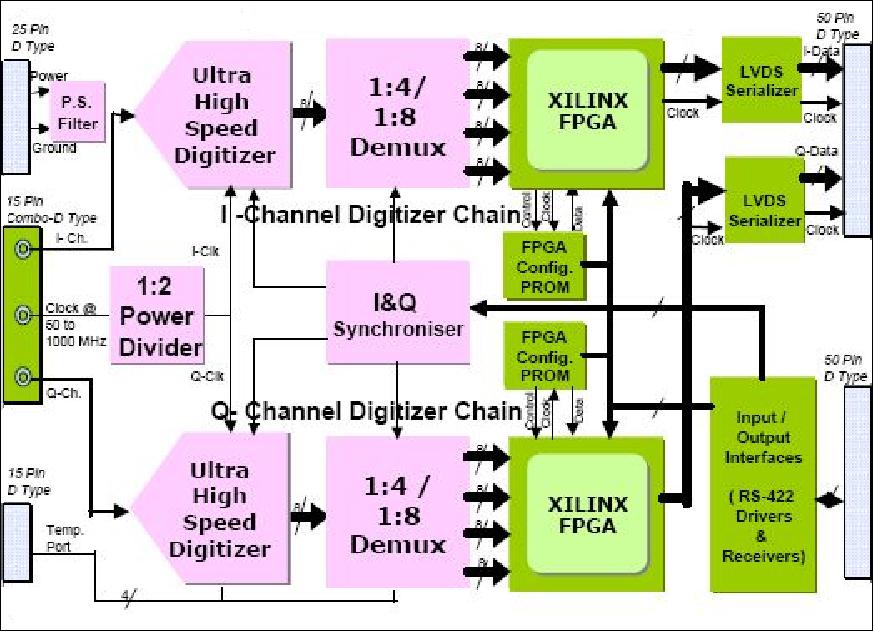
• DACS (Data Acquisition and Compression Subsystem). The objective of DACS is to support the following functions:
- High-speed signal (8 bit I/Q) quantisation of the complex radar echo, including calibration
- Demultiplexing of the signal into multiple channels
- Data compression is performed with a real-time flexible BAQ (Block Adaptive Quantization) algorithm of 2-6 bit length
- Variable data rate of 64-1562 Mbit/s
- Formatting of demultiplexed data channels and auxiliary information.
The DACS module consists of Atmel's high speed ADC (Analog Digital Converter) & demultiplexer and a Xilinx XQVR-600 FPGA-based BAQ and formatter. These are 2 identical DACS units along with their power supplies.
• PLC (Payload Controller). The objective is to provide embedded control. command and coordination of all RISAT-SAR activities, including the active antenna electronics and instrument configuration. PLC interfaces with the BMU (Bus Management Unit) and also generates all required control and timing signals in support of coherent SAR operations. The PLC hardware consists of a motherboard-daughterboard configuration using a single 80C32 microcontroller, a Xilinx XQVR-600 FPGA, a Mil-STD-1553B based control processor and 3 I/O modules along with its power supply. There are 2 PLCs, primary and redundant unit.
2) Tile Digital Electronics
The active antenna subsystem features a distributed embedded control subsystem which supports digital beam-forming and beam switching in the elevation direction. A three-stage hierarchy is implemented consisting of the PLC, TCU (Tile Control Unit) and TRC (Transmit Receive Controller).
• The TCU controls and coordinates the activities of a individual tile; it consists of multiple T/R modules with their electronics. The TCU utilises the beam configuration related information received from the PLC to translate and compute the phase and amplitude parameters for the relevant T/R modules (as well as monitoring). The TCU is a radiation-hardened ASIC (Application Specific Integrated Circuit) module containing the prime and redundant logics. The antenna consists of 12 TCUs.
• A single TRC unit controls the H and V T/R-RF modules. The TRC stores the entire characterisation (like phase and gain correction factors for a given T/R module pair (H&V) and controls the phase shifter and attenuator (both at 6 bit) in the T/R RF modules. The TRC is also a radiation-hardened ASIC module housed along with the T/R RF modules. A total of 288 TRC units are used for the active antenna.
3) Ground segment processing and support systems
• QLP/NRTP (Quicklook Processor/Near Real-time SAR Processor). This device consists of a cPCI computer system, and a COTS-based DSP (Digital Signal Processor). The multiprocessor DSP board uses 8 to 16 DSP modules with multiple link interfaces. The peripheral boards include SCSI, SVGA, and custom FPGA interfaces. Two-dimensional complex SAR processing, involving range and azimuth compression and motion compensation tasks are performed by the DSP boards. The processed imagery is displayed on a monitor and stored on a recorder. A cPCI (Pentium P$ single board) computer performs the control and coordination tasks for the various DSP devices and interfaces. 40)
DCG (Digital Chirp Generator) | |
Chirp parameters | 2-75 MHz; 20 µs |
Resolution | 10 bit amplitude; 12 bit frequency/phase (min) |
Device size, mass, power | 260 mm x 210 mm x 150 mm, 4 kg, 4.5 W |
DACS (Data Acquisition and Compression Subsystem) | |
ADC | 8 I+8Q @ 20.8 - 250 MHz sampling rate |
Onboard compression | 2-6 bit BAQ (Block Adaptive Quantization) with bypass facility |
Sensor data rate (max) | 326 Mbit/s (6 bit BAQ), 1562 Mbit/s (3 bit BAQ) |
Device size, mass, power | 260 mm x 210 mm x 150 mm, 4.6 kg, 27 W |
PLC (Payload Controller) | |
Timing | 2800-3700 Hz PRF (Pulse Repetition Frequency); 58-184 µs of data collection window |
Interfaces | MIL-STD-1553B @ 1 Mbit/s with bus BMU |
Device size, mass, power | 285 mm x 235 mm x 165 mm, 5 kg, 15 W |
TCU/TRC (Tile Digital Electronics) | |
No of elevation beams | 126 (over 100-700 km swath geometry on either side of the ground track) |
TRM phase/amp update rate | 18 µs @ PRF rate, HC TTL interface |
Device size, mass, power | 380 mm x 60 mm x 90 mm, 2 kg, 3 W (TCU) |
QLP/NRTP (Quicklook Processor/Near Real-time SAR Processor) | |
SAR image parameters | Resolution: 1-12 m (ground range) x 1-48 m (azimuth) |
Throughput | Real-time (QLP) to max 45 minutes (NRTP) per scene, 10-15 GFLOPS |
Device parameters | 8-14 slot cPCI chassis, PE SBC, 96 Tiger SHARC DSP @ 250 MHz, 700 W, 20 kg |
Standard products | Projection | UTM/POLYCONIC |
Datum | WGS84 | |
Resampling | CC | |
Format | CEOS/GEOTIFF | |
Media | DVD/DISK | |
Delivery | Courier / FTP | |
Value added products | Pol-SAR products | |
RISAT-1A
RISAT-1A (EOS-04) carries a state-of-the-art C-band Synthetic Aperture Radar (SAR) sensor system designed for high-resolution, all-weather, day-and-night Earth observation. The SAR payload operates at a central frequency of 5.35 GHz and offers multiple imaging modes, Spot, Fine, Medium, and Coarse Resolution Stripmap, with selectable resolutions ranging from 1 m to 50 m and swath widths between 10 km and 223 km. The sensor is capable of operating in various polarization configurations including single, dual (co- and cross-polarized), hybrid (circular transmit, dual receive), and full quad-polarimetric modes, enabling a wide range of Earth observation applications. The active phased-array antenna, measuring 6 m × 2 m, comprises 288 Transmit/Receive (TR) modules that facilitate electronic beam steering and flexible mode switching. The SAR system supports up to 126 beam positions and uses advanced onboard data processing with variable quantization and compression techniques (2–6 bit BAQ) to optimize data throughput. With high PRFs (up to 3500 Hz) and chirp bandwidths up to 225 MHz, the sensor delivers fine-resolution imagery suitable for diverse uses in agriculture, forestry, hydrology, disaster monitoring, and defense applications. 46) 47) 50) 51) 52)
Ground Segment
The RISAT-1 satellite health maintenance and SAR payload operations are carried out from the MOX (Mission Operations Complex) of ISTRAC (ISRO Telemetry, Tracking and Command Network), Bangalore, using various mission computers and associated mission software and communication links. 42) 43)
The TTC (Telemetry, Tracking and Command) functions of the satellite in S-band are also supported by a network of ground stations. The recently operationalised IMGEOS (Integrated Multi-mission Ground segment for Earth Observation Satellites) facility at NRSC (National Remote Sensing Center), Shadnagar, Hyderabad Complex carries out the automated execution of entire ground-processing tasks for RISAT-1 mission beginning with SAR payload programming, data acquisition and SAR signal and image DP (Data Processing) to SAR raw data and data product dissemination with fast turn-around times (TATs).
Unlike optical sensors, SAR image or data product generation involves elaborate pre-processing of SAR raw data as well as complex, two-dimensional radar-matched filtering or focusing apart from other motion correction tasks, all of which have been implemented and operationalised by the SIPA/SAC team. A HWQLP (Hardware Quick Look SAR Processor/NRTP (Near Real Time SAR Processor) has also been built by the MRSA/SAC team at Ahmedabad and installed at IMGEOS, NRSC, Shadnagar.
The complexity of RISAT-1 mission entailed proper planning, execution and critical monitoring of on-board payload subsystems. During LEOP (Launch and Early Orbit Phase), initial and normal phases were provided from the MOX/ISTRAC of Bangalore. Figure 47 illustrates the functional organisation of the RISAT-1 ground segment operations.
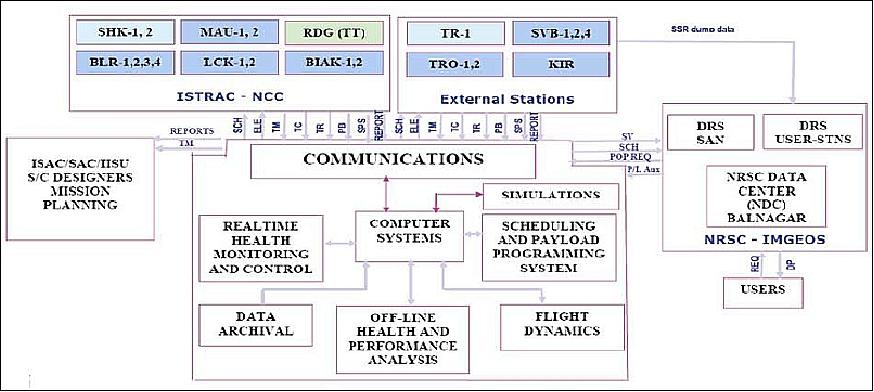
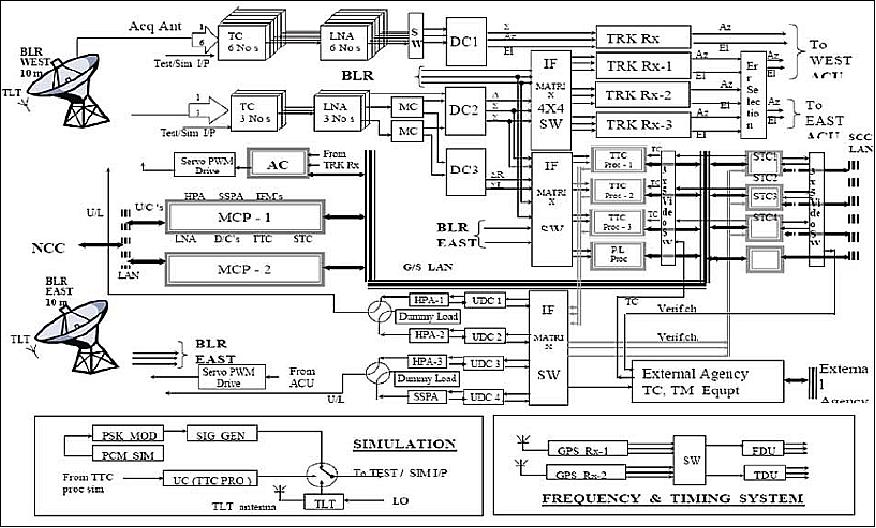
Figure 48 illustrates the TTC ground station configuration. The ISTRAC TTC stations are equipped with an antenna subsystem with T/R (Transmit/Receive) feed, TTCP (TTC Processor), STC (Station Computer), and Monitor and Control System. The station is configured to support S-band carrier reception with polarisation diversity mode for auto track and ranging functions. It receives both RHCP and LHCP signals simultaneously and combines them optimally before data detection. The ISTRAC communication network provides the real-time voice/data/fax connectivity for the mission operations between the MOX, the Vehicle Control Center, TTC stations, payload data acquisition, and the DP centers. Communication is established using satellite links, terrestrial links and dedicated fiber links.
The pre-launch and LEOP operations were supported from the MCR (Mission Control Room) and MAR (Mission Analysis Room). The regular normal phase operations are being supported from a DMCR (Dedicated Mission Control Room).
Roll bias and attitude steering for zero Doppler: Since the SAR payload is a side-looking radar, there is a roll bias requirement of ± 36° for the left and right-looking configuration. Also, to nullify the Doppler due to Earth's rotation and the Doppler variations due to the eccentricity of the orbit and Earth's oblateness, yaw and pitch steering of the spacecraft have to be performed. The necessary steering coefficients and bias commands are uploaded to the satellite through ground commanding. Both yaw and pitch steering coefficients are computed on ground and uplinked to the satellite. The residual Doppler (50–150 Hz) can be estimated either from the SAR raw data, or using the spacecraft attitude data, and is being corrected during processing.
SAR payload operations: RISAT-1 SAR payload operations are carried out using the on-board payload sequencer by transmitting the commands generated by the CSG (Command Sequence Generator) based on the request file received from NDC (NRSC Data Center), Hyderabad, using the PPS (Payload Programming System). PPS is a ground-based operational software system to efficiently plan user image acquisition requests and generate spacecraft payload sequencing commands for imaging the area of user request. It also helps to image the maximum number of user requested AOI (Areas of Interest) in a pass-wise sequence, by arranging the user requests in one orbit and optimally using the spacecraft resources.
The PPS is utilised to generate the P/L operations on a given day, including the SSR recording operations elsewhere in the world. The consolidated P/L plan is sent to the SCC (Spacecraft Control Center) of ISTRAC, Bangalore for command generation through the CSG system. The CSG is responsible for the generation of configuration and timing information and the beam parameters for conducting the SAR payload operations. The SAR P/L operation commands are uplinked one day in advance. Thus, the PPS and CSG activities are important components of the MMS (Mission Management System).
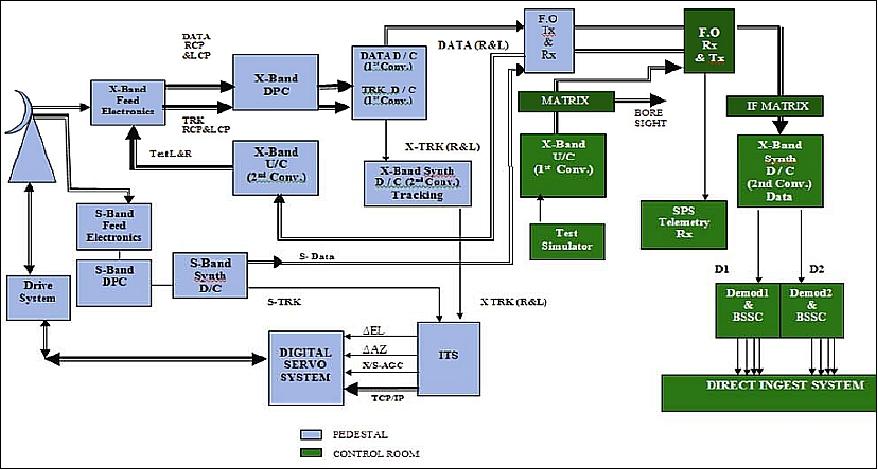
DRS (Data Reception System): The DRS comprises four 7.5 m antenna systems with dual polarisation configured in multi-mission mode to track and receive data from any remote sensing satellite. It is equipped with the state-of-the-art bore-site facility for validating the data reception chain, both in local loop and radiation mode. Figure 49 shows one of the RISAT-1 DRS chains configured under IMGEOS architecture. It consists of the antenna and tracking pedestal, dual polarised feed and RF systems, digital servo and automation system, IF and baseband system and data ingest system. The composite S/X feed is dual circularly polarised in both S-band and X-band with the capability to receive LHC and RHC polarised signals simultaneously using the frequency reuse technique. The S-band telemetry data and tracking signals are down-converted to 70 MHz IF. The down-converted X- and S-band tracking IF signals are fed to a three-channel ITS (Integrated Tracking System). The IF outputs from first data down-converter (two carriers) and the S-band data IF are transferred to the control room through a multi-core optical fiber cable and fed through a programmable IF matrix to the second down-converter and then to high data rate digital demodulator. The data and clock signals from high rate digital demodulators are driven through LVDS interface to the data ingest system for further processing and product generation.
The salient features of the RISAT-1 DRS are as follows:
• 7.5 m Cassegrain antenna system with G/T of 32 dB/°K @ 5° EL.
• Simultaneous RHC and LHC polarised signal reception @ 8212.5 MHz with dual polarised S/X-band composite feed using the frequency reuse technique.
• The feed and front-end system are realised with a single channel mono pulse tracking.
• Two data reception chains at 720 MHz IF, each with 320 MHz bandwidth.
• X-band auto track either through RHCP or LHCP carrier.
• QPSK modulated RF carrier with 160 Mbit/s data rate each in I and Q channels.
• Synthesised up/down converter with additional channels.
• IF link for transfer of high data rate modulated IF spectra.
• High data rate demodulators at 320 Mbit/s (I + Q) data rate.
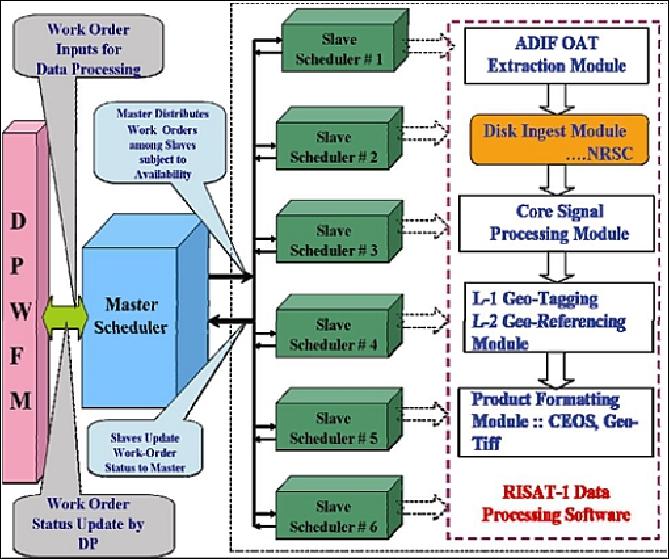
SAR off-line DP and product generation: The off-line operational DP for RISAT-1 SAR is carried out at NRSC, Shadnagar in an IMGEOS environment on six SMP nodes with each node having four 8 core-machines. The basic steps of SAR DP can be summarized as follows:
• Block adaptive quantisation decompression
• Correction for I and Q imbalance
• Doppler centroid estimation
• Range compression
• Range cell migration correction
• Azimuth compression
• Single-look complex or multi-look data generation
• Slant range to ground range conversion
• Geocoding.
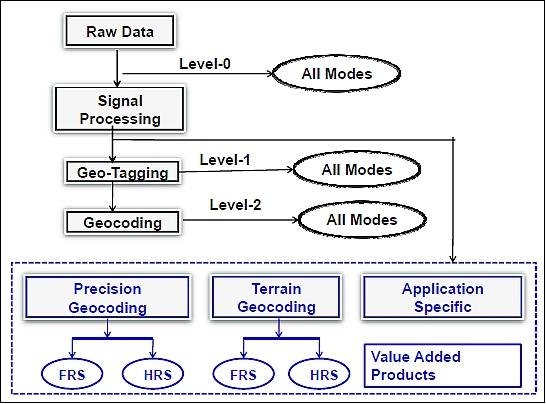
Figure 50 shows the basic data flow diagram for SAR processor. The request for data product generation is ingested through Data Product work flow managers. Master and slave schedulers execute on separate hosts. Once a work-order arrives, the software automatically routes it to a free slave node and generates the outputs. The status of work-orders, viz. running, suspended, aborted, scheduled, error or completed for a particular scheduler session can be known from GUI. The data products generation facility caters to Stripmap, ScanSAR and Spotlight imaging modes of the RISAT-1 satellite with the following product level specifications.
• Raw Signal Products (level-0)
• Geo-Tagged Products (level-1)
• Terrain-corrected Geocoded Products (level-2).
The data products from RISAT-1 have already been released to users from 19 October 2012 onwards. The RISAT-1 imaging products are expected to enhance the application potential of SAR data not only in India, but also globally in many important resource applications and disaster management situations. RADAR (Radio Detection and Ranging) data from space platforms have already made a significant mark the world over because of the ability of the radars to make observations during the day or night, look through cloud cover and achieve resolution and observe details that are difficult to obtain for optical and infrared sensors. Many operational modes and the hybrid polarimetric capabilities of RISAT-1 are expected to open up newer avenues, as it provides many more observable parameters like amplitude, phase and state of polarisation, enabling many new scientific studies leading to diverse and novel applications using microwave data (Ref. 6).
RISAT-1A
The ground segment of RISAT-1A is an integrated system designed to support mission operations, payload tasking, data acquisition, processing, archiving, and dissemination. Managed primarily by the National Remote Sensing Centre (NRSC), the ground segment includes dedicated facilities for satellite control (through ISRO’s ISTRAC), data reception (via ground stations in Hyderabad and other regional centers), and real-time mission planning. The Payload Planning System (PPS) ensures efficient imaging based on user requests and satellite constraints, optimizing resource usage while managing multiple beam modes and polarizations. The Data Reception and Processing System (DRPS) handles large data volumes transmitted at high data rates (up to 1478 Mbit/s), supporting fast turnaround of standard and customized data products. Data products are processed through automated pipelines for radiometric and geometric correction, and are distributed to end users via the Bhuvan geoportal and NRSC’s Data Archive and Dissemination System (DADS). The ground segment also includes quality control systems for calibration, validation, and long-term archival, enabling operational and scientific exploitation of RISAT-1A data. 52) 53)
References
1) T. Misra, S. S. Rana, V. H. Bora, N. M. Desai, C. V. N. Rao, Rajeevjyothi, "SAR Payload of Radar Imaging Satellite (RISAT) of ISRO," Proceedings of EUSAR 2006, Dresden, Germany, May 16-18, 2006
2) T. Misra, S. S. Rana, R. N. Tyagi, K. Thyagarajan, "RISAT: first planned SAR mission of ISRO," Asia-Pacific Remote Sensing, Conference 6407, `GEOSS and Next-Generation Sensors and Missions,' Stephen A. Mango, Ranganath R. Navalgund, Yoshifumi Yasuoka, Editors, Proceedings of SPIE, Vol. 6407, Goa, India, Nov. 13-17, 2006
3) B. Asha Rani, P. Deepak, T. Misra, "Development of the ScanSAR Processing Algorithm for Spaceborne SAR," Proceedings of IRSI (International Radar Symposium India), Bangalore, India, Dec. 20-22, 2005
4) "RISAT-1 Radar Imaging Satellite," Sept. 2007, URL: http://www.scanex.ru/en/publications/pdf/publication50.pdf
5) N. Valarmathi, R. N. Tyagi, S. M. Kamath, B. Trinatha Reddy, M. VenkataRamana, V. V. Srinivasan, Chayan Dutta, N. Veena, K. Venketesh, G. N. Raveendranath, G. Ravi Chandra Babu, K. Sreenivasa Prasad, Rajeev R. Badagandi, P. Natarajan, S. Sudhakar, J. Subhalakshmi, Sreenivasa Rao, M. Krishna Reddy, "RISAT-1 spacecraft configuration: architecture, technology and performance," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 462-471, URL: http://www.currentscience.ac.in/Volumes/104/04/0462.pdf
6) A. S. Kiran Kumar, "Significance of RISAT-1 in ISRO's Earth Observation Program," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1,Foreword, pp. 444-445, URL: http://www.currentscience.ac.in/Volumes/104/04/0444.pdf
7) "RISAT-1," ISRO, URL: https://web.archive.org/web/20141029064313/http://www.isro.org/satellites/risat-1.aspx
8) "RISAT-1 brochure," ISRO, URL: https://web.archive.org/web/20141129053552/http://www.isro.org/pslv-c19/pdf/pslv-c19-brochure.pdf
9) P. Kunhikrishnan, L. Sowmianarayanan, M. Vishnu Nampoothiri, "PSLV-C19/RISAT-1 mission: the launcher aspects," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 472-476, URL: http://www.currentscience.ac.in/Volumes/104/04/0472.pdf
10) "Radar Imaging Satellite-1," Proceedings of UN COPUOS (Committee on the Peaceful Uses of Outer Space), UNOOSA, Vienna, Austria, June 6-15, 2012, URL: http://www.oosa.unvienna.org/pdf/pres/copuos2012/tech-21.pdf
11) "Indian RISAT-1 Spacecraft Fragments in Late September – Update," NASA, Orbital Debris Quarterly News, Vol. 21, Issue 1, Feb. 2017, URL: https://orbitaldebris.jsc.nasa.gov/quarterly-news/pdfs/odqnv21i1.pdf
12) Information provided by Somya S. Sarkar and Tapan Misra, Director of ISRO/SAC, Ahmedabad, India.
13) "Radar Imaging Satellite RISAT - 1," NRSC (National Remote Sensing Center), Brochure, Release 4.0 dated 03 Feb 2016, URL: http://www.nrsc.gov.in/sites/all/pdf/RISAT-1BROCHUREV4.pdf
14) G. G. Ponnurangam, T. Jagdhuber, I. Hajnsek, Y. S. Rao, "Retrieval of soil moisture using multi-temporal hybrid polarimetric RISAT-1 data," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
15) Tapan Misra, A. S. Kiran Kumar, "Scatterometer and RISAT-1: ISRO's contribution to radar remote sensing," Proceedings of the IGARSS (International Geoscience and Remote Sensing Symposium) 2015, Milan, Italy, July 26-31, 2015
16) "CEOS EO Handbook-Agency Summary - ISRO," Updated for 2015, URL: http://database.eohandbook.com/database/agencysummary.aspx?agencyID=11
17) Floods in Indonesia, February 2015, NRSC, URL: http://www.nrsc.gov.in/Indonesia_2015.html
18) "Flood Inundation in Malaysia," ISRO/NRSC, Dec. 31, 2014, URL: http://www.nrsc.gov.in/Malaysia_Flood.html
19) "RISAT-1 now available for near real time deliveries," KSAT, Nov. 6, 2015, URL: http://www.ksat.no/node/860
20) Mayank D. Mishra, Parul Patel, H. S. Srivastava, P. R. Patel, A. Shukla, A. K Shukla, "Absolute Radiometric Calibration of FRS-1 and MRS mode of RISAT-1 Synthetic Aperture Radar (SAR) data using Corner Reflectors," International Journal of Advanced Engineering Research and Science (IJAERS), Vol. 1, Issue 6, Nov. 2014, ISSN: 2349-6495, URL: http://tinyurl.com/q5tcuvh
21) "MDA, India sign contract for RADARSAT-2 data," Geospatial World, Aug. 13, 2014, URL: http://geospatialworld.net/News/View.aspx?id=29616_Article
22) "MDA + NRSC of India ...Contract Validates India's Confidence In RADARSAT For Natural Disasters + More," SatNews, Aug. 12, 2014, URL: http://www.satnews.com/story.php?number=1700271844
23) Vinay K. Dadhwal, "Using Indian EO data for resource conservation & sustainable development planning," 57th Session of UNCOPUOS, Vienna, Austria, 11-20 June, 2014, URL: http://www.unoosa.org/pdf/pres/copuos2014/tech-13.pdf
24) Information provided by Tapan Misra, Deputy Director of MRSA (Microwave Remote Sensors Area), ISRO/SAC (Space Application Center), Ahmedabad, India
25) Vinay K Dadhwal, "RADAR Imaging Satellite ((RISAT)) 1 - SAR Mission of ISRO," Proceedings of the 50th Session of Scientific & Technical Subcommittee of UNCOPUOS, Vienna, Austria, Feb. 11-22, 2013, URL: http://www.oosa.unvienna.org/pdf/pres/stsc2013/tech-25E.pdf
26) ISRO, URL: https://web.archive.org/web/20131206024250/http://www.isro.org:80/pslv-c19/Imagegallery/satelliteimages.aspx
27) "Radar Imaging Satellite (RISAT-1) launched," NNRMS Bulletin 36, June 2012, p. 12, URL: https://web.archive.org/web/20130311212134/http://www.isro.org/newsletters/contents/nnrms/NNRMS%20Bulletin%20June%202012.pdf
28) "RISAT-1 placed in final Polar Sun-synchronous orbit," April 29, 2012, URL: http://www.gktoday.in/risat-1-placed-in-final-polar-sun-synchronous-orbit/
29) "RISAT-1 successfully placed in its final orbit," WebIndia, April 28, 2012, URL: http://news.webindia123.com/news/Articles/India/20120428/1974316.html
30) T. Misra, S. S. Rana, K. N. Shankara, "Synthetic Aperture Radar Payload of Radar Imaging Satellite (RISAT) of ISRO," URSI-GA (Union Radio Scientifique Internationale-General Assembly) ,New Delhi, India, Oct. 21-29, 2005, URL: http://www.ursi.org/Proceedings/ProcGA05/pdf/F08.6(01643).pdf
31) A. S. Kiran Kumar, "Significance of RISAT-1 in ISRO's Earth Observation Program," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 444-445, URL: http://www.currentscience.ac.in/Volumes/104/04/0444.pdf
32) Tapan Misra, S. S. Rana, N. M. Desai, D. B. Dave, Rajeevjyoti, R. K. Arora, C. V. N. Rao, B. V. Bakori, R. Neelakantan, J. G. Vachchani, "Synthetic Aperture Radar payload on-board RISAT-1: configuration, technology and performance," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 446-461, URL: http://www.currentscience.ac.in/Volumes/104/04/0446.pdf
33) N. M. Desai, C. V. N. Rao, R. Neelakantan, B. V. Bakori, D. B. Dave, Tapan Misra, R. K. Arora, V. R. Gujraty, S. S. Rana, "Core Radar Electronics and Industry Role in ISRO's Current and Future Microwave Remote Sensing Payloads," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.3.8
34) N. M. Desai, B. Saravana Kumar, Ritesh Kumar Sharma, Ramesh Gameti, Shalini Gangele, Abhishek Kunal, J. G. Vachhani, "Onboard Signal Processors for ISRO's Microwave Radars," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, paper: IAC-09-B1.4.12
35) A. S. Kiran Kumar, "Earth Observation Systems," User Interaction Meeting, NRSC (National Remote Sensing Center), Hyderabad, India, Feb. 16-17, 2012, URL: http://www.nrsc.gov.in/assets/pdf/kr.pdf
36) N. M. Desai, C. V. N. Rao, R. Neelakantan, B. V. Bakori, D. B. Dave, Tapan Misra, R. K. Arora, V. R. Gujraty, S. S. Rana, "Core Radar Electronics and Industry Role in ISRO's current and future Microwave Remote Sensing Payloads," Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B1.3.8
37) A. S. Kiran Kumar, Tapan Misra, "Sensor Technology for Earth Observation: An ISRO Perspective," 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.3.01
38) N. M. Desai, J. G. Vachhani, B. S. Kumar, V. R. Gujraty, S. S. Rana, "Advanced Digital Technology Elements of Synthetic Aperture Radar Payload of RISAT Mission," Proceedings of EUSAR 2006, Dresden, Germany, May 16-18, 2006
39) H. Patel, S. Bhattacharya, R. Neelkanthan, V. R. Gujraty, "Architecture of On-Board Controller Digital ASIC for Spaceborne Active Phased Array Radar," Proceedings of IRSI (International Radar Symposium India), Bangalore, India, Dec. 20-22, 2005
40) N. M. Desai, B. Saravana Kumar, Ritesh Kumar Sharma, A. Kunal, R. B. Gameti, V. R. Gujraty, "Near Real Time SAR Processors for ISRO's Multi-Mode RISAT-1 and DMSAR," Proceedings of EUSAR 2008, 7th European Conference on Synthetic Aperture Radar, June 2-5, 2008, Friedrichshafen, Germany
41) Sesha Sai, "SAR Applications from RISAT‐1 Perspective," User Interaction Meeting, NRSC (National Remote Sensing Center), Hyderabad, India, Feb. 16-17, 2012, URL: http://www.nrsc.gov.in/assets/pdf/ss.pdf
42) V. Mahadevan, T. V. S. R. K. Prasad, D. S. Jain, Santanu Chowdhury, M. Pitchamani, N. M. Desai, "Ground segment for RISAT-1 SAR mission," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 477-489, URL: http://www.currentscience.ac.in/Volumes/104/04/0477.pdf
43) Manab Chakraborty, Sushma Panigrahy, A. S. Rajawat, Raj Kumar, T. V. R. Murthy, Dipanwita Haldar, Abhisek Chakraborty, Tanumi Kumar, Sneha Rode, Hrishikesh Kumar, Manik Mahapatra, Sanchayita Kundu, "Initial results using RISAT-1 C-band SAR data," Current Science, Vol. 104, No 4, February 25, 2013, Special Section: Radar Imaging Satellite-1, pp. 477-489, URL: http://www.currentscience.ac.in/Volumes/104/04/0490.pdf
44) WMO OSCAR , April 1, 2020, Satellite: RISAT-1. [online] OSCAR: Observing Systems Capability Analysis and Review Tool. URL: https://space.oscar.wmo.int/satellites/view/risat_1
45) SatNews, “ISRO’s EOS-09 (RISAT-1B) launch failure during 3rd stage”, May 18, 2025, URL: https://news.satnews.com/2025/05/18/isros-eos-09-risat-1b-launch-failure-during-3rd-stage/
46) National Remote Sensing Centre (NRSC), “ANNOUNCEMENT OF EOS-04 DATA PRODUCTS TO USERS”, March 23, 2022, URL: https://www.nrsc.gov.in/sites/default/files/pdf/EOS_04_writeup_modified.pdf
47) NRSC, “EOS - 04”, URL: https://www.nrsc.gov.in/sites/default/files/pdf/Announcements/E04_BROUCHURE.pdf
48) NASA, “RISAT-1”, URL: https://nssdc.gsfc.nasa.gov/nmc/spacecraft/display.action?id=2012-017A
49) RockeLaunch.Live, “EOS-09 (RISAT-1B)“, May 18, 2025, URL: https://www.rocketlaunch.live/launch/eos-09-risat-1b
50) Gunter’s Space Page, “RISAT 1, 1A, 1B (EOS 04, 09)”, URL: https://space.skyrocket.de/doc_sdat/risat-1.htm
51) Sharma Shweta, Meadows Peter, “EOS-04 (RISAT-1A) Strip and ScanSAR Full-Pol Product Evaluation for Calibration”, BAE Systems, URL: https://calvalportal.ceos.org/html/portal/sarc/documents/documents/07_Rao_1570939413_presentation_REMOTE_updated.pdf
52) NRSC, “EOS-04 (RISAT-1A) Hand Book“, URL: https://bhoonidhi.nrsc.gov.in/bhoonidhi_resources/help/docs/EOS-04_Handbook.pdf
53) NRSC, “EOS-04 Data Products Formats (January 2025) Version 1.2.5”, URL: https://bhoonidhi.nrsc.gov.in/bhoonidhi_resources/help/docs/EOS_04_Data_Products_Format_Document.pdf