SDS-4 (Small Demonstration Satellite-4)
EO
JAXA
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Mission complete |
| Launch date | 17 May 2021 |
| End of life date | 07 Jan 2021 |
| CEOS EO Handbook | See SDS-4 (Small Demonstration Satellite-4) summary |
SDS-4 (Small Demonstration Satellite-4)
Spacecraft Launch Mission Status Sensor Complement References
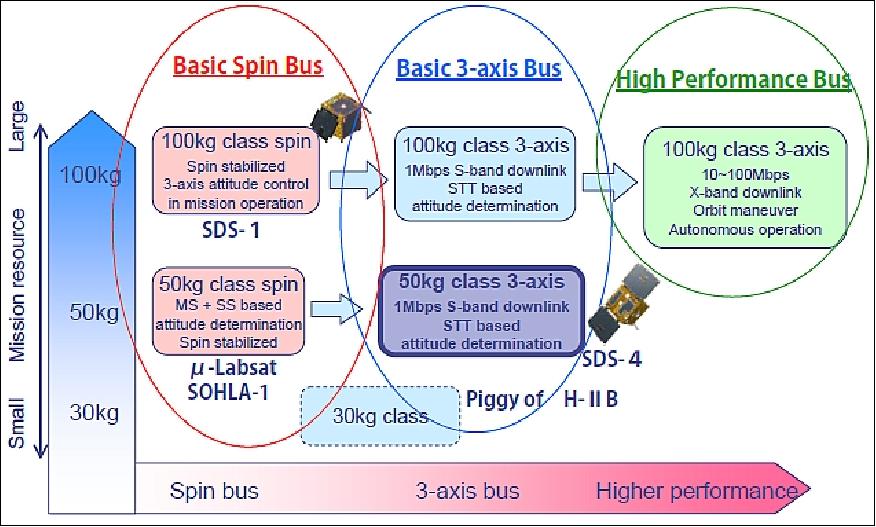
SDS-4 is a follow-on technology demonstration mission of SDS-1 heritage, based on the SDS standard bus concept of JAXA (Japan Aerospace Exploration Agency). The main mission of the SDS-4 microsatellite is to demonstrate the space-based automatic identification system experiment (SPAISE), quartz crystal microbalance (QCM), flat-plate heat pipe on-orbit experiment (FOX), and In-flight experiment of Space materials using THERME (IST) technologies developed by a JAXA-CNES joint research project. - In addition, the SDS-4 project seeks to demonstrate the various bus components which were developed for microsatellites, such as: OBC, PCU, TRx, the small MEMS rate sensor, and the QPSK communication technology. 1) 2) 3) 4) 5) 6)
The SDS-4 project was initiated in 2009. The general development policies of the SDS bus are defined for the following categories:
• Management:
- Apply a new “quality management program for small satellites”
- Plenary meetings on a weekly basis and a simple development process will reduce large formal design reviews
• System design:
- Use of a simple non-redundant system architecture
- Allow adoption of COTS components with radiation and screening tests
• Development and testing:
- The performance and quality of the satellite is finally confirmed through end-to-end system level tests
- The development team verifies the component and quality of the system
• Documentation:
- Select the necessary and sufficient documents to keep documentation within bounds.
Spacecraft
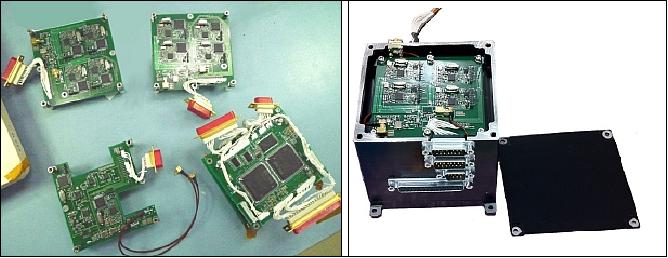
SDS-4 is a microsatellite with a mass of about 50 kg using the standard SDS bus for spaceborne technology demonstrations and for observation applications. It features an OBC and an S-band transponder, both of higher performance than those of past SDS missions. The dual-winged spacecraft is 3-axis stabilized using the zero-momentum attitude control technique. The microsatellite has been developed by STDRC (Space Technology Demonstration Research Center) of JAXA.
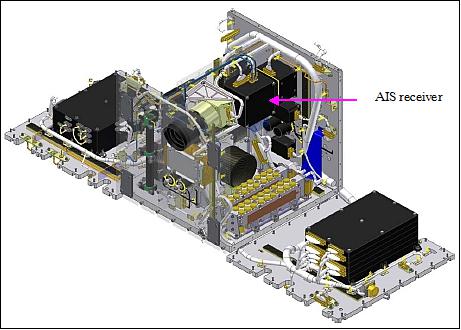
The satellite uses an aluminum honeycomb box structure that is black-anodized for thermal environment improvement. The satellite is divided into two shelves: upper and lower. The upper shelf holds the mission payloads (subsystems). This layout of the satellite provides maximum access to the components during harnessing and system AIT (Assembly, Integration and Test). The spacecraft dimensions are: 500 mm x 500 mm x 450 mm; its mass is expected to be around 48 kg. The SDS-4 envelope is compatible with the piggyback ride constraint for JAXA H-IIA LV.


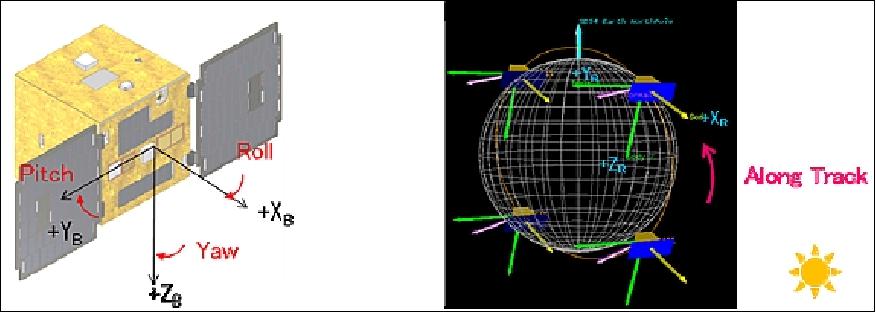
ADCS (Attitude and Determination and Control Subsystem): SDS-4) is the first zero momentum three-axis controlled 50 kg class satellite from JAXA. The ADCS provides 3-axis sun-oriented attitude control. The direction of +XB is pointing toward the sun.
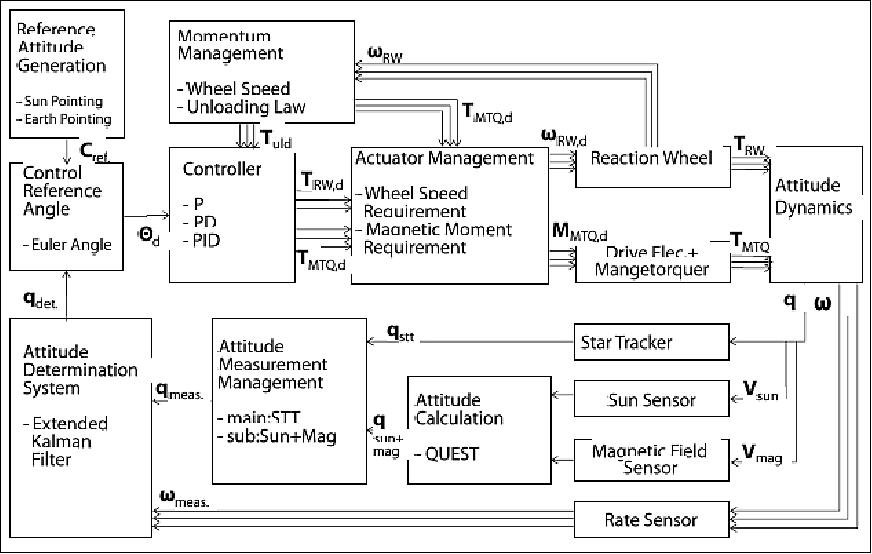
The ADCS consists of the following components:
• 1 STT (Star Tracker) which uses CMOS APS (Active Pixels Sensor) detector
• 1 DSS (Digital Sun Sensor) oriented toward the sun
• 5 CSS (Coarse Sun Sensors) oriented outside the satellite, excluding the sun direction
• 1 magnetometer (MAGS)
• 1 MEMS rate sensor, with maximum power consumption of 2 W. The rate sensor has a bias (at stabilized temperature) of < 3º/hr (see VSGA description).
• 3 reaction wheels, each with maximum power consumption of approx. 0.7 W at 300 rpm. The maximum speed of the wheel is 6000 rpm, the mass of the assembly is 1.0 kg.
• 3 magnetic torquers
• 1 GPSR (GPS Receiver) and 1 GPSA (GPS Antenna) for on-board orbit determination.
The star tracker is mounted at an angle of -10º, skewed from the -Y axis, to enable it to avoid blinding (due to the Earth or the sun) to the greatest degree possible. The star tracker has an acquisition mode, in which it takes one star image, to obtain the Euler angle of the satellite, and a tracking mode, in which the star imagery is taken (and processed ) every 250 ms. Consequently, the satellite attitude can be tracked with a high degree of precision.
Mode | Description | Pointing requirements |
NOP | The Non-Operation Mode (NOP), in which the spacecraft attitude is uncontrolled. | None |
RDM | The Rate Detumbling Mode (RDM), which uses interaction with the magnetic field to reduce spacecraft angular rates imparted at separation. It also serves as a fallback safe mode during anomalies. | The satellite rate shall be less than 2.0º/s |
SAM | The Sun Acquisition Mode (SAM), whereby the spacecraft attitude is controlled with respect to the sun with a 0.1º/s slow spin rate about the Xb axis. | The angle between the Xb axis and Sun vector shall be less than 5.0º. |
SPM | The Sun Pointing Mode (SPM), whereby the spacecraft attitude is controlled with respect to the inertial frame for sun pointing. | Roll < 5.0º, Pitch < 5.0º, Yaw < 5.0º (3σ) |
EPM | The Earth Pointing Mode (EPM), whereby the spacecraft attitude is controlled with respect to the orbital frame for nadir pointing. | Roll < 5.0º, Pitch < 5.0º, Yaw < 5.0º (3σ) |
EPS (Electrical Power Subsystem): Use of GaAs solar cell arrays for power generation. An AOP (Average Orbit Power) of ~60 W is provided. The power storage system consists of two NiMH batteries configured in parallel. The batteries have a capacity of 3.7 Ah. The power distribution system works via a PCU (Power Control Unit), which consists of switches to connect or disconnect power to each component, with fuses to isolate any short-circuits.
DHS (Data Handling Subsystem): The OBC monitors and controls all important procedures and components including ADCS, EPS, DHS, the TT&C subsystems and the mission payload. All memory is radiation-hardened and protected against SEUs. Most components are connected via a serial link with an RS-422 interface. The memory capacity of OBC is 64 MB external SDRAM. The OBC controls all devices in satellites directing commands not addressed to it to the corresponding devices or executing commands addressed to it, such as switching, telemetry, and store/read data.
TCS (Thermal Control Subsystem): The TCS is basically passive, using its heat shield against solar radiation. System and battery heaters are required to maintain an adequate temperature inside the spacecraft.
RF communications: Use of S-band, the TT&C data rates are 16 kbit/s and 1 Mbit/s in downlink and 4 kbit/s in uplink.
Spacecraft mass | ~ 48 kg |
Spacecraft power generation | ~ 60 W |
Spacecraft size | 500 mm x 500 mm x 450 mm (launch configuration) |
ADCS (Attitude and Orbirt Control Subsystem) | -3-axis stabilization |
RF communications | S-band |
Ground stations | - Japan |
Launch
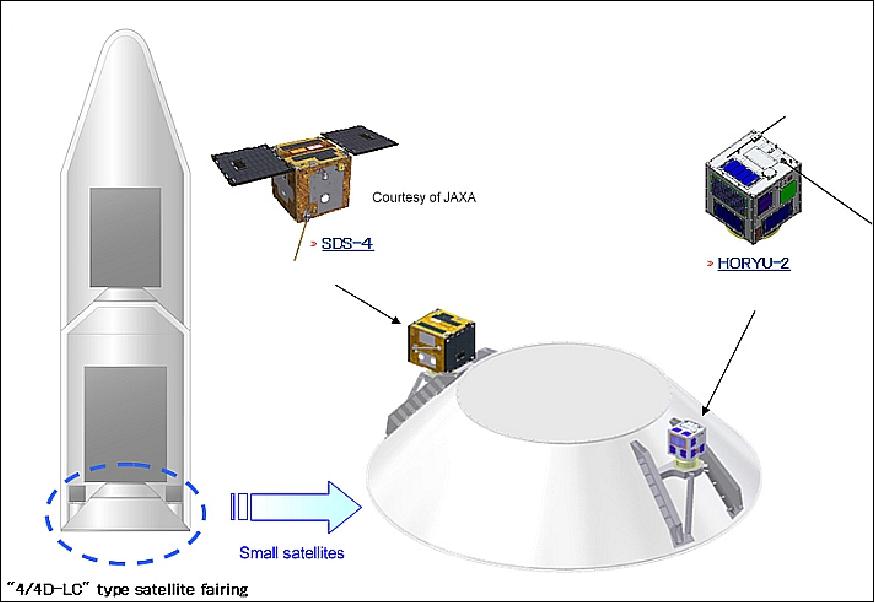
The SDS-4 microsatellite was launched as a secondary payload on May 17, 2012 (UTC). The launch vehicle was H-IIA F21, and the launch site is TNSC (Tanegashima Space Center), Japan. — The primary payload on this flight was GCOM-W1 (Global Change Observation Mission-Water) of JAXA (nicknamed Shizuku) with a mass of ~1990 kg. 8)
The secondary payloads on this flight were: 9)
• KOMPSAT-3 (Arirang-3) of KARI (Korea Aerospace Research Institute) with a launch mass of 970 kg, Korea. KOMPSAT-3 is referred to as “co-payload”.
• SDS-4 of JAXA, Japan with a mass of ~ 48 kg. 10)
• Horyu-2, a technology demonstration satellite mission of KIT (Kyusyu Institute of Technology), Japan.
Orbit: Sun-synchronous orbit, altitude of ~677 km, inclination = 98.19º, LTAN (Local Time on Ascending Node) at 13:30 hours.
Mission Status
• On 24 April 2019, JAXA and Sky Perfect JSAT Corporation of Tokyo announced an agreement on the transfer of the SDS-4 (Small Demonstration Satellite-4). As a result of evaluating the proposals submitted by competing companies, JAXA selected SKY Perfect JSAT to be the transferee and operator of SDS-41, which has been owned and operated by the Agency. For JAXA, this is the first transfer of an artificial satellite developed by the Agency to a company in the private sector, and for SKY Perfect JSAT, SDS-4 will be the first LEO (Low Earth Orbit) satellite to be owned by the company. 12)
- Recently SKY Perfect JSAT has been proactively providing ground station services for LEO satellite operators in addition to the conventional geostationary satellite services. In order to promptly transmit the voluminous data delivered from LEO satellites to the customers so that they can make effective use of the data, SKY Perfect JSAT uses its own ground station equipment for LEO satellites located in Hokkaido, Ibaraki and Okinawa. Moreover, it has also partnered with both Japanese and overseas ground station service companies to enhance the network infrastructure. The company has decided to own SDS-4 as part of the measures to achieve its vision for the space and satellite business, which has been upheld since fiscal 2018.
- Among the artificial satellites operated by JAXA, some, such as SDS-4 , have already fulfilled their planned missions, and they are at a later stage for use. If companies in the private sector make proactive use of these satellites, it will help expand the scope of the space industry. JAXA deems the transfer of SDS-4 as the first step to this end.
• February 2017: The SDS-4 mission is in operation according to the JAXA website.
• October 2015: In-flight results of the three years operation of ADCS (Attitude Determination and Control Subsystem) show that the SDS-4 fulfils the required performance to operate the mission and technology demonstration. The flexibility to pointing requirements enables further experiments for missions. Additional mission extension until the end of life is currently under discussion at JAXA, however, technology demonstration of AIS mission as well as other bus technologies are on-going. The data obtained from SDS-4 is also provided to universities and several research projects have conducted such as research about the intelligent fault detection system by using artificial intelligence technologies and the research about the attitude estimation filters. To utilize the opportunities of SDS-4 in-orbit demonstration, additional experiments of attitude control systems will be conducted. 13)
• May 2014: The SDS-4 mission has successfully completed two years of operations on orbit. The results show that the SDS-4 could achieve RSS pointing errors of <5.0º during the nadir pointing experiments. The inflight results of the two years of ADCS operations show that the SDS-4 fulfils the required performance to operate the mission and technology demonstration. The flexibility to pointing requirements enables further experiments for missions. Additional mission extension until the end of life is currently under discussion at JAXA while the technology demonstrations of the AIS mission as well as other bus technologies are on-going. The data obtained from SDS-4 is also provided to universities and several research projects have conducted such as research about the intelligent fault detection system by using artificial intelligence technologies and the research about the attitude estimation filters. To utilize the opportunities of SDS-4 on orbit demonstration, additional experiments of attitude control will be conducted. 14)
• The SDS-4 mission achieved full success and in the summer of 2013, the mission continues to collect valuable mission data, remaining in full working order. The lessons learned will be applied to the next small satellite project in JAXA (Ref. 5).
• On May 17, 2013, the SDS-4 spacecraft was on-orbit for 1 year, the mission is operating nominally. 15)
- To enhance the mission and conduct new experiments, a post-mission phase started in mid-November 2012, and is continuing. For example, SPAISE experiments with attitude control are conducted for extra success, after confirming the feasibility from each view point regarding the operational status of EPS, TCS and ADCS (Ref. 16).
- Lessons learned with SDS-4: SPAISE is the first AIS instrument on a JAXA mission. Most efforts were focused on the technical development of the hardware - and not so much on the operational phase of the instrument (i.e. commanding sequences). It turned out that detailed operational plans for the instrument required a considerable effort due to the rather complex procedures involved. These were error-prone and took a considerable time to confirm. — To solve this problem, the project introduced an auto procedure generation tool for SPAISE, which automatically establishes a procedure from an experiment plan. To facilitate and streamline preparation, and reduce human error, the project found it important to relegate the analog work to S/W, which also saves labor (Ref. 16).
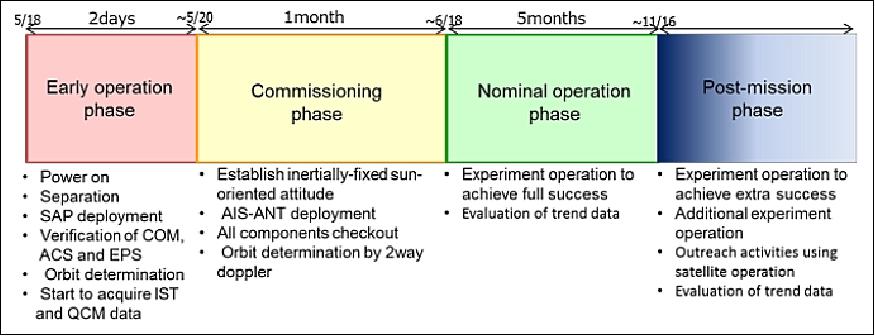
• The nominal operations phase lasted five months (until Nov. 16, 2012), during this phase the SDS-4 missions were conducted and achieved full success. 16)
The project evaluated also the performance of the bus components on-orbit, such as the radiation tolerance of OBC, the generation power of the solar arrays, the charge-discharge cycle of the NiMH battery, the transmission power of TR/TX, the torque reduction of the wheels, etc. As things stand, no components are degraded.
• Fall 2012: The spacecraft and its payload are operating nominally providing valuable mission data. Starting on Nov. 12, 2012, SDS-4 operations will move into the utilization phase. 17)
• June 18, 2012 — start of operational phase: After the launch and in the early operation phase, the initial checkout phase lasted for one month. In the checkout phase, performances of attitude control and determination in nominal SPM (Sun Pointing Mode) were evaluated. All components were checked out during in this phase. These test results in the LEOP and initial check out phase were successful. Now, the SDS-4 spacecraft is in nominal operation phase and in full working order (Ref. 17).
• June 6, 2012: The AIS receiver aboard SDS-4 was confirmed to receive AIS messages from ships cruising around Japan. 18)
• On May 20, 2012, JAXA announced that SDS-4 had completed its critical phase operations and moved to the initial phase of operations (i.e. commissioning). The satellite is currently in good health. The initial functional verification operations will continue for about one month. 19)
• JAXA confirmed the separation of the SDS-4 (Small Demonstration Satellite-4) from the H-IIA Launch Vehicle No. 21 (H-IIA F21) via data received from the satellite. 20)
After the separation, the 1st AOS was obtained at a KSAT ground station and the satellite health status was confirmed. The SAPs (Solar Array Panel) were deployed from an auto-stored command, and its result was confirmed by the picture taken by SDS-4 monitor camera.

Sensor Complement
SPAISE (Space-based Automatic Identification System Experiment)
The objective of SPAISE is to demonstrate technologies of the future spaceborne AIS (Automatic Identification System) service and to demonstrate its performance via evaluation of on-orbit data and function checks of the onboard AIS receiver system. 21)
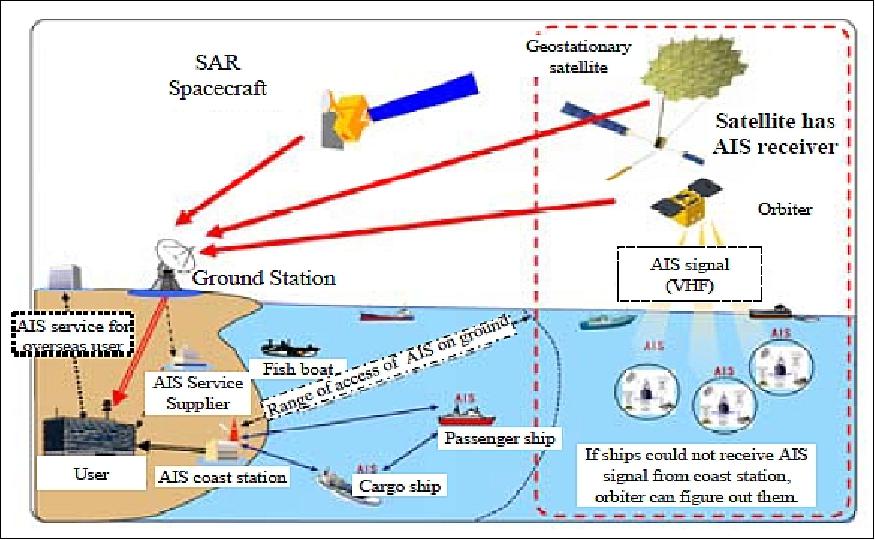
The requirements for maritime surveillance with an integrated information systems are as follows.
1) Safety of marine transportation
2) Environmental monitoring (oil spills, polluters)
3) Maritime security against unidentified or suspicious ships
4) Protection of commercial vessels against piracy
5) Protection of natural resources
6) Improved search and rescue capabilities.
Physical properties | - 2 AIS monopole antennas with deployment mechanism |
Functional capabilities | - Decode and store AIS signals (on board) |
Survey of AIS signal properties | - Spectra |
Research of AIS signal analysis | - Signal separation and decoding by ground equipment |
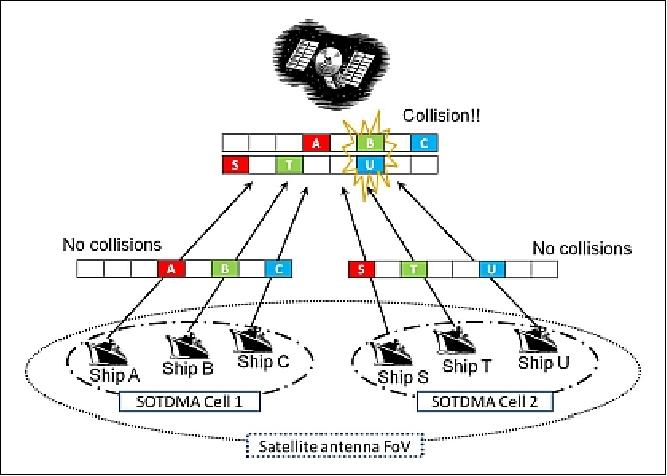
Some background of the spaceborne AIS problem: The SPAISE instrument will encounter some problems when a satellite detects AIS signals of ships in the ground segment. Significant problems for SPAISE are message collisions, the Doppler Effect, and Faraday rotation.
• The collision issue: The terrestrial STDMA (Self Organized Time Division Multiple Access) VHF data link avoids message collisions from ships in a same cell. However, this system is not enough to prevent message collisions in case of SPAISE. Satellites have large footprints (i.e. vast visibilities) including many maritime SOTDMA (Self Organized Time Division Multiple Access) cells. Hence, message collisions coming from some signals from different cells are caused by the large area of satellite FOV (Field of View) as shown in Figure 11. The collision problem reduces the probability of getting the proper information of ships.
• The Doppler shift issue: The frequency of AIS carriers is effected the Doppler shift of about - 4 kHz to + 4 kHz. The Doppler shift is due to velocity difference between satellites and ships. A satellite in LEO (Low Earth Orbit) moves at speeds of ~7 km/s. In contrast, the speed of a Class A ship is very small. This difference causes the Doppler effect - and requires to tune the frequency band of the satellite AIS receiver.
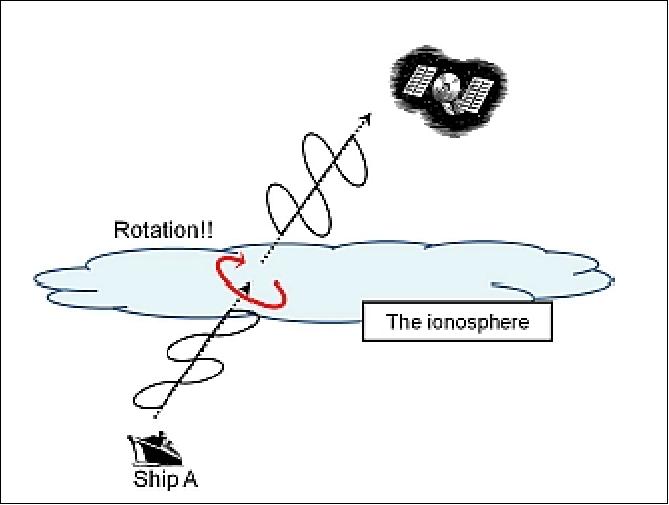
• The Faraday rotation issue: When linearly polarized waves are entering the ionosphere, the polarization planes are rotated by the Faraday effect, referred to as Faraday rotation, which depends primarily on frequency of the signals. The amount of rotation of the polarization angles is inversely proportional to the square of the frequency. The planes of polarization of the AIS signals are affected by Faraday rotation, due to the fact that the AIS signals are linearly polarized waves as defined by ITU.
The antennas receiving the AIS signals of SDS-4 are monopole antennas. The polarization of monopole antennas is linear. A received power of AIS signals may decrease due to the polarization mismatch losses between the AIS signals and satellite receiving antennas. Figure 12 shows the influence of Faraday rotation.
The SPAISE receiver, developed by AES (Advanced Engineering Services CO., Ltd), is constructed mainly from COTS components to achieve low cost and quick development times.
The SPAISE device offers two types of detection methods. Operators can choose between the store & forward method and the sampling method. When a satellite receives AIS signals, the on-board computer demodulates the AIS signals and stores the AIS data. This method is expected to require a lot of storage capacity for the AIS data. Figure 14 shows the configuration of the store & forward method.
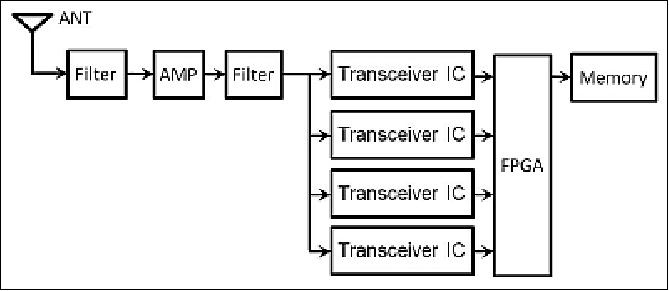
The transceiver ICs are able to set up a center frequency individually to receive the Doppler effected signals. The transceiver ICs can work in parallel.
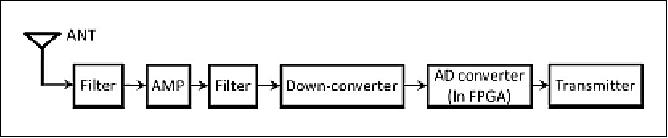
Sampling method: In this case, the on-board computer samples AIS signals. This method intends to collect waveform data of AIS signals for signal analysis on the ground. Signal analysis system is under development now. It is expected to extract AIS data from overlap messages. Figure 15 shows the configuration of the sampling method. In this method, the sampled data are transmitted directly, without an intermediate storage, from the spacecraft transmitter to the ground stations. Obviously, a considerable amount of computing power is needed to support the real-time sampling method.
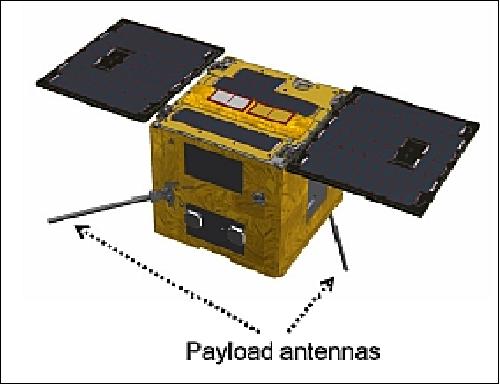
The payload antennas make up a polarization diversity reception system using two antennas to avoid decreasing received power of AIS signals (Figure 17).
When ships lock up at the satellite, the polarization planes of satellite antennas are orthogonal. The data of the AIS signals received in space is transmitted by transmitters of the satellite using QPSK (Quadrature Phase Shift Keying) modulation and the USB (Unified S-band). The data rates are depended on a type of transmission methods. For the USB method it is 16 kbit/s, for the QPSK method the data rate is 1 Mbit/s. The store & forward method can use both types. However, the sampling method uses only the QPSK transmission, because the sampled data are enormous in volume.
The SPAISE technology demonstration represents an important step for maritime traffic surveillance and in spaceborne observations in Japan. After the experiment, the next generation AIS receiver will be developed for a future network
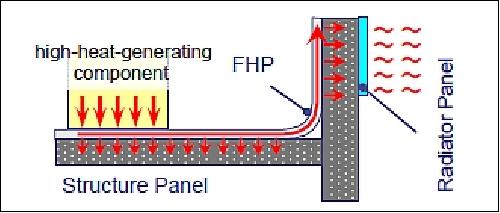
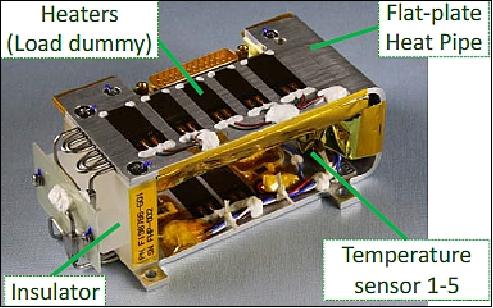
FOX (Flat-plate heat pipe On-orbit Experiment)
The FHP (Flat-plate Heat Pipe) has a flat shape, which enables the transfer of exhaust heat from the narrow clearance between components and the structure. This experiment is intended to demonstrate and confirm the FHP performance in a micro-gravity environment. Figure 19 shows the FOX flight model; it has heaters of four different wattages to simulate heat generation of components and five temperature sensors to measure FHP effects.
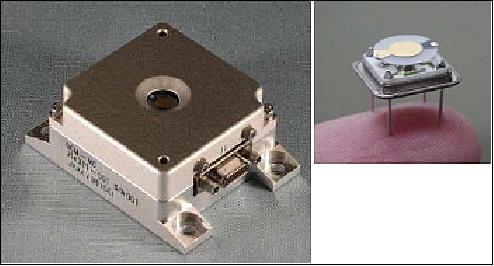
QCM (Quartz Crystal Microbalance)
QCM is a newly developed, inexpensive and small mass device. The objective of QCM is to measure contamination in the environment of the spacecraft from its development phase to the on-orbit operations phase. Figure 20 shows a flight model of QCM. The QCM sensor is being used to measure the chemical and electric thruster exhaust plumes or the AO (Atomic Oxygen) environment in future science missions.
IST (In-flight experiment of Space materials using THERME)
The objective of IST is to measure the solar absorptance and degradation characteristics of a new thermal coating material using the THERME testing device, which was developed through the JAXA-CNES joint research project.
THERME has a heritage experiment - flying currently on French missions like SPOT-5 (launch in May 2002), HELIOS-2A (launch Dec. 2004), and DEMETER (launch June 2004). THERME aims to evaluate the ageing of thermal coatings (evolution of solar absorptivity αs), especially of recent thermal coatings. 22)
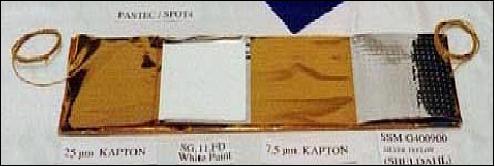
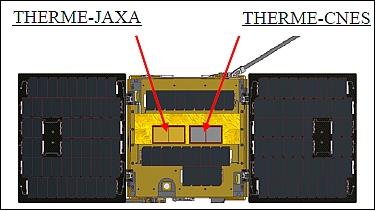
The IST on SDS‐4 involves two THERME units, each provided with two kinds of samples: CNES samples and JAXA samples.
- The CNES samples are two kinds of white paints, i.e., "SG122FD" on a polyimide substrate and "PSBN" on an aluminum substrate.
- The JAXA samples are thermal control films, i.e., aluminized AO‐tolerant polyimide film "BSF‐30" with/without UV protective coating. Each sample is 60mm x 60mm in size, resulting in a size of 120 mm x 60 mm on each THERME unit.
VSGA (Vibrating Structured Gyro Assembly)
JAXA has developed a high accuracy, small, lightweight, and low-power 3-axis attitude rate sensor called VSGA (Vibrating Structured Gyro Assembly) for microsatellites and small satellites. The VSGA contains three orthogonally mounted higher-performance MEMS gyros and the interface circuit, achieving lightweight, low-power consumption, and simple interface. 23)
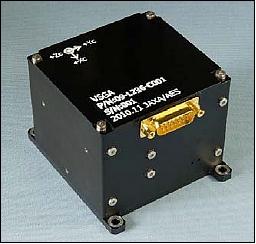
Mechanical | Instrument mass, size | 0.520 kg, 103 mm x 88 mm x 72 (H) mm |
Electrical | Power | +5V DC, 1.4 W peak |
Signal I/F | RS422, async serial I/O, 19.2 kbit/s | |
Performance: | - Measurement range | ±45º |
Function | - ADC sampling rate | 1 kHz |
Environment | - Temperature range | -20ºC to ~60ºC |
The VSGA contains three orthogonally mounted COTS VSG (Vibrating Structure Gyros) and the interface circuit. It is intended for use in low-cost and easy-to-use system for attitude determination on micro- and small satellites. The VSG uses a silicon ring which measures the angular rate by using the Coriolis effect on the sensor element. The elements of the sensor are designed and manufactured by MEMS technology, that is, small, lightweight, and low-power consumption.
Mechanical | Instrument mass, size | 60 g, 63 mm x 63 mm x 19 (H) mm |
Electrical | - Power | +5V DC, 0.65 W |
Performance | - Measurement range | ±100ºC/s |
The interface between the satellite system and the VSGA is simplified by digital processing of the microcontroller inside the interface circuit. For accuracy improvement, the detected angular rates are filtered and integrated with a high sampling rate, and users can use both the averaged rate and the angle output. Because the bias rate of the VSG is slightly affected by temperature, onboard temperature compensation is implemented.
COTS parts are used in VSGA to minimize cost. Each part is screened and radiation tested, partially replaced with space-rated parts. Each product is calibrated and evaluated for its performance before shipment.
The first flight model of VSGA has been integrated into the SDS-4 microsatellite of JAXA (technology demonstration).
References
1) Takashi Ohtani, Yosuke Nakamura, Yasuyuki Takahashi, Koichi Inoue, Keiichi Hirako, “JAXA SDS-4 Spacecraft System Design and Test Results,” 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011; URL of presentation, IAA-B8-1004, http://media.dlr.de:8080/erez4/erez?
cmd=get&src=os/IAA/archiv8/Presentations/IAA-B8-1004.pdf
2) Information provided by Takashi Ohtani, Tsukuba Space Center of JAXA
3) http://www.jaxa.jp/projects/sat/sds4/index_e.html
4) Takashi Ohtani, Yosuke Nakamura, Yasuyuki Takahashi, Koichi Inoue, Keiichi Hirako, “System Proto-Flight Test and Launch Site Test Results of JAXA’s Technology Demonstration Satellite SDS-4,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Portoroz, Slovenia, June 4-8, 2012
5) Yosuke Nakamura, Kunitoshi Nishijo, Naomi Murakami, Kazutaka Kawashima, Yuuta Horikawa, Kazuhide Yamamoto, Takashi Ohtani, Yasuyuki Takhashi, Koichi Inoue, “Small Demonstration Satellite-4 (SDS-4): Development, Flight Results, and Lessons Learned in JAXA’s Microsatellite Project,” Proceedings of the 27th AIAA/USU Conference, Small Satellite Constellations, Logan, Utah, USA, Aug. 10-15, 2013, paper: SSC13-X-1, URL:
http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=2978&context=smallsat
6) Moto Takai, Takashi Ohtani, Yosuke Nakamura, Yasuyuki Takahashi, Koichi Inoue, “JAXA's Technology Demonstration Mission SDS-4,” Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Melbourne, Australia, July 21-26, 2013
7) Yuta Nakajima. Naomi Murakami, Takashi Othani, Hiroyui Morishita, Yosuke Nakamura, Koichi Inoue, “SDS-4 Attitude Control System: First Flight Results of Attitude Control System From Nominal Operation and Extended Mission,” Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.6A.2
8) “Launch Result of the Global Changing Observation Mission 1st - Water "SHIZUKU" (GCOM-W1) and the Korean Multi-purpose Satellite 3 (KOMPSAT-3) by H-IIA Launch Vehicle No. 21,” JAXA, May 18, 2012, URL: http://www.jaxa.jp/press/2012/05/20120518_h2af21_e.html
9) “Overview of Co-payload and Secondary Payloads,” JAXA, URL: http://www.jaxa.jp/countdown/f21/overview/payload_e.html
10) “Successful launch of H-IIA F 21 with SHIZUKU and SDS-4 aboard!,” JAXA, May 18, 2012, URL: http://www.jaxa.jp/projects/sat/sds4/topics_e.html
11) “Launch Overview,” MHI (Mitsubishi Heavy Industries), URL: http://h2a.mhi.co.jp/en/f21/overview/index.html
12) ”JAXA and SKY Perfect JSAT Conclude an Agreement on the Transfer of the Small Demonstration Satellite-4,” JAXA Press Release, 24 April 2019, URL: https://global.jaxa.jp/press/2019/04/20190424a.html
13) Yuta Nakajima, Naomi Murakami, Takashi Ohtani, Chitose Sekigawa, Koichi Inoue, ”SDS-4 Attitude Control System: Three years in-orbit operation results,” Proceedings of the 66th International Astronautical Congress (IAC 2015), Jerusalem, Israel, Oct.12-16, 2015, paper: IAC-15-B4.6A.10
14) Yuta Nakajima, Naomi Murakami, Takashi Ohtani, Koichi Inoue, “SDS‐4 Attitude Control System: Two years in‐orbit Operation Results,” Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
15) Information provided by Takashi Ohtani of JAXA, Tokyo, Japan.
16) Yoshiyuki Miura, Takashi Ohtani, Yosuke Nakamura, Yasuyuki Takahashi, Koichi Inoue, “Flight Results of JAXA’s SDS-4 mission and its Lessons Learned,” Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013
17) Takashi Othani, Yosuke Nakamura, Yasuyuki Takahashi, Koichi Inoue, Keiichi Hirako, “First Flight Result of Japanese Technology Demonstration Mission SDS-4,” Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B4.6A.2
18) “SDS-4 received Automatic Identification System (AIS) from ships,” JAXA, June 6, 2012, URL: http://www.jaxa.jp/projects/sat/sds4/topics_e.html
19) “SDS-4: The End of Critical Phase Completed,” JAXA, May 20, 2012, URL: http://www.jaxa.jp/press/2012/05/20120520_sds4_e.html
20) “SDS-4 Flight Status,” JAXA, May 18, 2012, URL: http://www.jaxa.jp/press/2012/05/20120518_sds4_e.html
21) Masashi Abe, “The Concept of Space-based Automatic Identification System Experiment (SPAISE),” Proceedings of the 28th ISTS (International Symposium on Space Technology and Science), Okinawa, Japan, June 5-12, 2011, paper: 2011-j-18
22) Stéphanie Remaury, Pascale Nabarra, Elise Bellouard, Stéphane d’Escrivan, “In-flight thermal coatings ageing on the THERME experiment,” ISME 2009, URL: http://esmat.esa.int/Materials_News/ISME09/pdf/10-In-flight/Remaury%20Paper.pdf
23) Yuta Nakajima, Yosuke Nakamura, Hiroaki Kawara, Naomi Murakami, Takashi Othani, Koichi Inoue, Keiichi Hirako, “Development of High Accuracy MEMS Rate Sensor for Small Satellites,” Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4.6A.11
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top