SOHLA (Space Oriented Higashiosaka Leading Association)
EO
JAXA
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | JAXA |
| Mission status | Mission complete |
| Launch date | 23 Jan 2009 |
| End of life date | 10 Oct 2009 |
| CEOS EO Handbook | See SOHLA (Space Oriented Higashiosaka Leading Association) summary |
SOHLA-1 (Space Oriented Higashiosaka Leading Association-1) / Maido-1
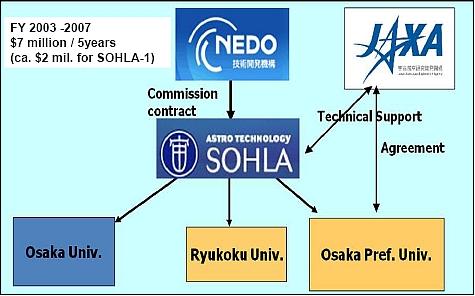
In May 2004, JAXA and SOHLA/Osaka Prefecture University started a cooperative agreement on small satellite technology development. This represents a space technology transfer program of JAXA to expand the range of the space development community in Japan. The objective is to get SMEs (Small and Medium sized manufacturing Enterprises) involved in small space projects and new space technologies. 1) 2) 3) 4)
Under the cooperative agreement, JAXA intends to contribute to socio-economic development by returning its R&D results to society, and SOHLA tries to revitalize the local economy through the commercialization of versatile small satellites.
According to the agreement, JAXA provides SOHLA its technical information on small satellites and other technical assistance for the development of the small satellites (SOHLA-1, SOHLA-2). The development of SOHLA-1 and SOHLA-2 will be joined by Tokyo University and Osaka University for the provision of experiment devices, and by Osaka Prefecture University for system design. SOHLA-1 is the first satellite in SOHLA's 5 year program involving the research and development of a PETSat (Panel Extension Satellite) system.
Background: The SOHLA initiative was started by managers of small and medium-sized enterprises and small factories in Higashi-Osaka (Kansai region) in 2002, to establish the business to produce and launch artificial satellites as a local industry and make the area attractive for young people. SOHLA-1 is promoted by NEDO (New Energy and Industrial Technology Organization) and is being carried out as a joint project among industry, government and academia.
The prime objective of the SOHLA-1 program is to realize low-cost and short term development of a microsatellite which utilizes the components and bus technologies of JAXA's MicroLabSat. A further goal is to provide training of engineers for the PETSat (Panel Extension Satellite) program. 5) 6)
Spacecraft
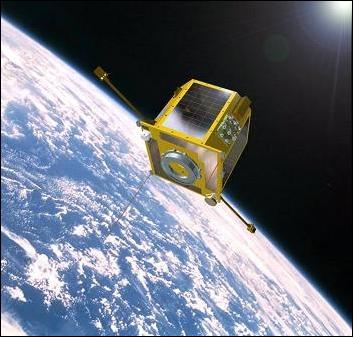
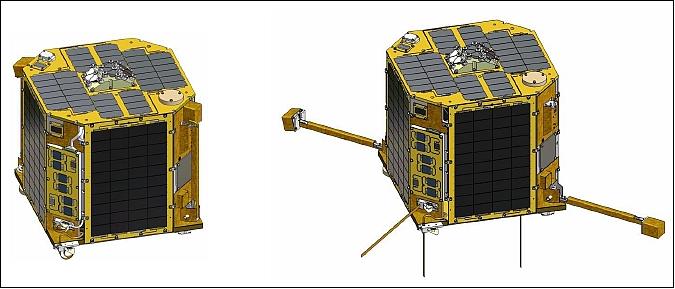
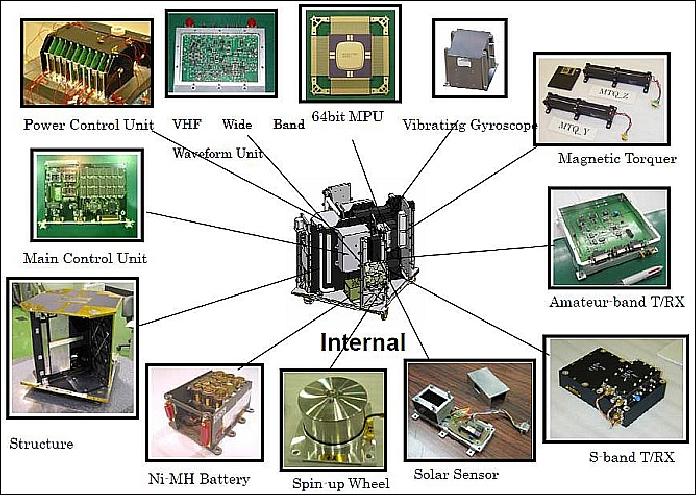
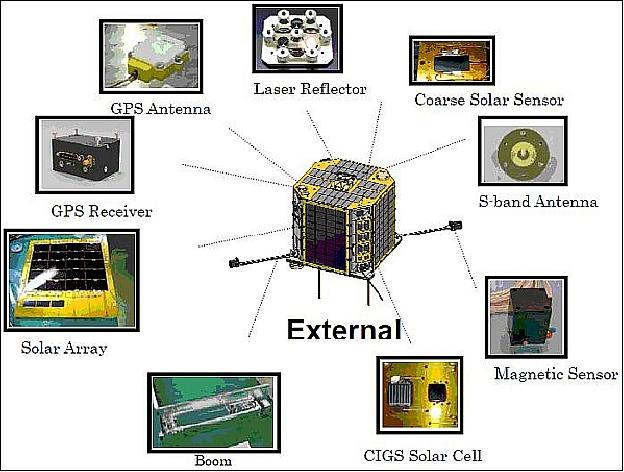
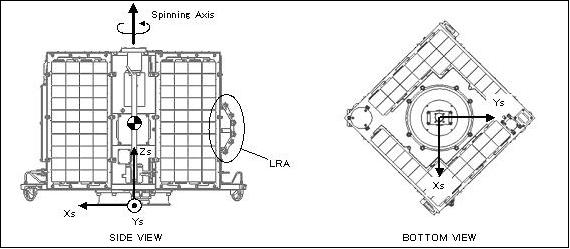
SOHLA-1 is a spin-stabilized microsatellite of MicroLabSat heritage (50 kg class). The spin axis is fixed to inertial reference frame. The spin axis (z-axis) lies in the plane containing the solar direction and the normal to the orbital plane. The bus design uses isogrid panels for the main structure.
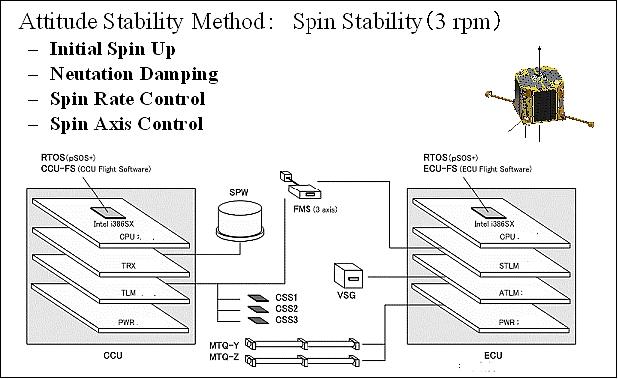
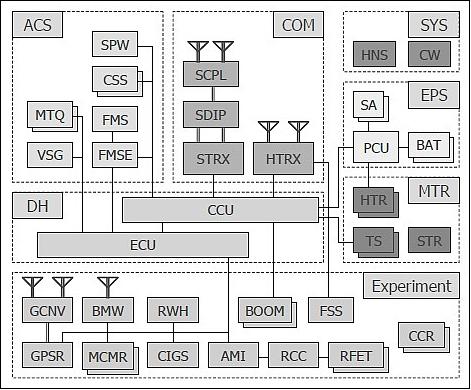
In the system architecture all the ACS (Attitude Control System), COM (Communication System), EPS (Electric Power System), and Experiment are connected to the satellite main central system called CCU (Central Control unit) and ECU (Extended Control Unit). 7)
ACS: The primary method of attitude control is spin stabilization. Nutation damping and spin control are achieved by driving magnetic torques based on onboard computing. Spin axis estimation is achieved by using a solar sensor and magnetic sensor; spin axis control is based on offline computing. An improved spin axis control algorithm has been newly developed for SOHLA-1, and its effectiveness has been examined both with the simulator and by a flight test using MicroLabSat.
Spacecraft mass, power, size | 57 kg, ~100 W, 500 mm x 500 mm x 500 mm |
Spacecraft configuration | Octagonal prism, and two deployable booms |
ACS (Attitude Control Subsystem) | - Spin stabilized (3 rpm nominal), |
Thermal control subsystem | A passive implementation is used. |
EPS (Electric Power Subsystem) | - 30-40 W of power, face-mounted GaAs solar cells, |
Navigation | Single frequency GPS system (L1) |
RF communications | - Single S-band 4096 bit/s downlink, 500 bit/s uplink |
Mission duration, expected life | > 3 months |
Launch
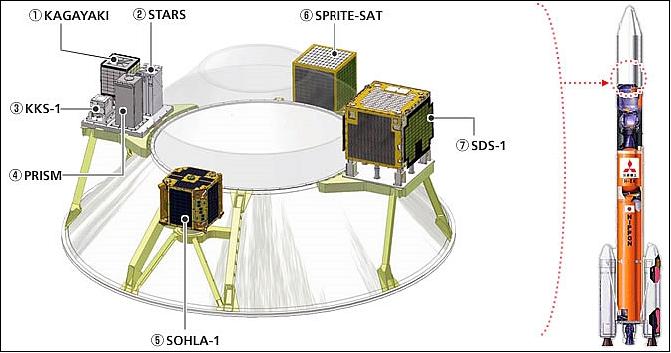
A launch of the SOHLA-1 spacecraft took place on January 23, 2009 on the H-IIA vehicle. The launch site was the Yoshinobu Launch Complex at the Tanegashima Space Center, Kagoshima, Japan. SOHLA-1 was a secondary payload on the GOSAT primary mission.
The seven secondary payloads on this flight were:
- SDS-1 (Small Demonstration Satellite-1) of JAXA (~100 kg)
- SOHLA-1 (Space Oriented Higashiosaka Leading Association-1), Japan (50 kg)
- SpriteSat (Tohoku University), Japan (microsatellite of ~57 kg)
- PRISM (Picosatellite for Remote¿sensing and Innovative Space Missions) of ISSL of the University of Tokyo, 5 kg
- Kagakaki (SORUNSat-1), Japan, 20 kg
- KKS-1 (Kouku Kosen Satellite-1) of Tokyo Metropolitan College of Industrial Engineering), nanosatellite of 3 kg
- STARS-1 (Space Tethered autonomous Robotic Satellite-1) of Kagawa University, Japan, ~ 10 kg.
After launch, the SOHLA-1 spacecraft was given the nickname Maido-1.
Orbit: Sun-synchronous near-circular orbit, altitude = 666 km, inclination = 98.06º.
RF communications: The S-band is the primary communications link with a data rate of 4.096 kbit/s in downlink and 500 bit/s in uplink. The secondary downlink is provided in VHF (amateur band). The FSS data is downlinked in the VHF band.
Satellite operation/control and the acquisition of telemetry data such as experimental data and image data are conducted by the JAXA Space Technology Demonstration Research Center at the Tsukuba Space Center. The ground station network of JAXA, Masuda, Okinawa, and Katsu’ura stations, are supporting telecommunications with the satellite using S-band frequencies.
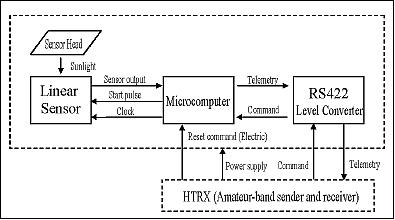
An amateur band radio transceiver (HTRX) is also on-board, and Osaka Prefecture University is operating its own amateur-band ground station and carrying out on-orbit demonstration of the newly developed solar sensor FSS (Fudai Sun Sensor).

Mission Status
• The SOHLA-1 mission was retired on October 10, 2009 on command from a JAXA ground station. All mission objectives were completed to satisfaction. 8) 9)
The SOHLA-1 collaborative project is regarded only a starting point in the overall technology transfer program of JAXA. All parties realized the importance of the experience gained throughout the mission.
Experiment | Conducted operations and results |
Orbit determination technology demonstration | All all aspects and functions were working well. |
DOS (Small Dosimeter) | Radiation absorbed dose was measured with propriety |
CIGS (Solar Cell demonstration experiment) | Degradation of Si solar cell (reference) and thin-film solar cells were compared |
AMI (Advanced Micro processing In-orbit experiment) | All parts were working well. |
MCMR (Micro Camera) | All functions of this camera were working well. |
Deployable boom | The system was working properly |
FSS (Fudai Sun Sensor) | All Functions were working well. |
BMW (Broadband Measurement of Waveforms) | All Functions were working well. |
• The nominal operations phase was carried out in good condition for three months (March - May, 2009), and subsequently followed by the extended operations phase (June-September, 2009). 10)
• Contact with the spacecraft was made shortly after deployment into orbit. Initial functional verification of the spacecraft operations were conducted for about a month.

Sensor Complement/Experiments
Technology demonstration of eight experiments:
1) Orbit determination technology experiment and its component demonstration (JAXA)
2) Space-environment measurement experiment and its component demonstration (JAXA)
3) Deployable boom demonstration (conducted by Ryukoku University)
4) Small monitor camera demonstration MCMR (conducted by JAXA)
5) Student's sun-sensor demonstration conducted by OPU (Osaka Prefecture University)
6) Demonstration of a component for broadband measurement of waveform for VHF lightning impulses (conducted by Osaka University), referred to as BMW.
7) CIGS solar-cells demonstration experiment (conducted by JAXA)
8) Demonstration of space-qualified 200 MIPS 64bit MPU (conducted by JAXA)
One of the orbit determination technology experiment is the Tech-demo of the low-cost, micro-GPS receiver developed by JAXA based on COTS (Commercial off-the-shelf) automobile technology. Satellite Laser Ranging (SLR) is needed for the calibration of GPS based satellite positioning.
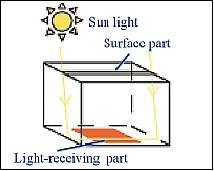
FSS (Fudai Sun Sensor)
FSS was developed by students of OPU (Osaka Prefecture University) with support from JAXA and AES (Advanced Engineering Services) Ltd. of Japan. The device comprises a surface part and a light-receiving part (Figure 11). On the surface part, a sun sensor usually carries a slit or a pinhole to limit incident light. On the light-receiving part, the electric current output by solar battery cells or the light-receiving point is detected by a CCD to measure the angle of incidence. In contrast to regular sun sensors, the FSS employs a string to create shade. The FSS device is a one-axial sun sensor: it measures the angle between the spin axis of the satellite and sunlight. This angle is defined as the total sun angle (TSA). 12)
Mass, size | 0.450 kg, 80 mm x 150 mm x 39 mm |
Max power consumption, temperature range | 1 W, -20 to +40ºC |
Detection accuracy | 2~3º (onboard) |
Detection range | 58 ± 29º (onboard) |

DOS (Small Dosimeter):
The objective is to measure the space radiation with a RadFET (Radiation sensitive Field Effect Transistor). DOS is a mission component consisting of the RCC (RADFET Control Circuit) and four RadFETs (RFET) as shown in Figure 14. The RCC is a printed board that is covered and attached to AMI (Advanced Microprocessing In-orbit) experiment equipment component, a 200 MIPS class 64 bit MPU for space application on a 120 mm wide x 50 mm high x 70 mm long aluminum plate. Its maximum weight is 0.66 kg. 13) 14)
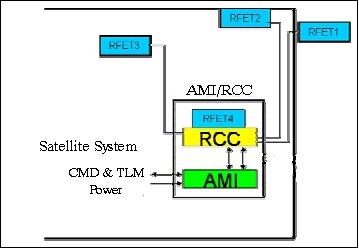
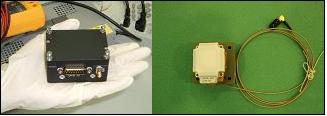
The telemetry data interfaces with the AMI at the CMOS 5.0 V-level protocol. The RCC itself has one RADFET, a specially designed positive channel metal oxide semiconductor (PMOS) transistor with a thick gate oxide, which is optimized for increased radiation sensitivity. The RADFET is suitable for space use in terms of cost, weight, and low power consumption. The RFET is a printed board on which RADFETs are arranged on an aluminum chassis. It is 47 mm wide x 22 mm high x 39 mm long and weighs 0.06 kg without its wire harness (Figure 15).

One RFET (RFET1) is attached outside the satellite wall; another (RFET2) is attached inside the satellite wall. RFET3 is attached in the center of the satellite. RFET4, without the aluminum chassis, is arranged on the printed board of the RCC.
The absorbed dose at which the RFETs are arranged is evaluated before flight. Table 4 presents calculation results for the absorbed dose and the equivalent aluminum thickness. These results are compared with flight data. The data help direct construction of a highly accurate total dose effect model.
Parameter/Item | Mounting location | ||
| REFT1 | REFT3 | REFT4 |
Dose (rad) | 4.99 x 102 | 1.91 x 102 | 2.20 x 102 |
Equivalent aluminum thickness [mm] | |||
Minimum | 2.68 | 3.52 | 4.68 |
Maximum | 46.85 | 51.66 | 71.59 |
Micro GPS receiver:
The objective is to demonstrate/validate a micro-GPS receiver developed by JAXA based on COTS (Commercial-of-the-Shelf) automobile technology.
BMW (Broadband Measurement of Waveforms):
BMW was designed and developed by LRG-OU (Lightning Research Group of Osaka University), Osaka, Japan. The aim of BMW is o examine the feasibility of the spaceborne DITF (Digital Interferometer) device. 15)
DITF is a system to locate a source of VHF impulses based on the digital interferometric technique. The feature of DITF is its broadband design (from 25 MHz to 100 MHz) and implicit redundancy for estimating a VHF source location. Its fairly high resolution and the compactness of the system are great advantage for spaceborne applications. The expected accuracy of DITF on a low altitude satellite is expected to be about 0.01 radians; this may be a solution and a unique opportunity to discriminate between the active and non-active thunderclouds by future satellite observations.
BMW is proposed to examine the feasibility of DITF by receiving VHF lightning impulses in space. BMW consists of a single pair of an antenna, a bandpass filter, an amplifier, and an ADC (Analog-to-Digital Converter) to record broadband VHF pulses in orbit. The waveforms of ~ 100 EM pulses in VHF band, emitted from a lightning flash, can be obtained. Three pairs of BMW devices with an accurately synchronized 3-channel ADC are needed to realize the DITF concept.
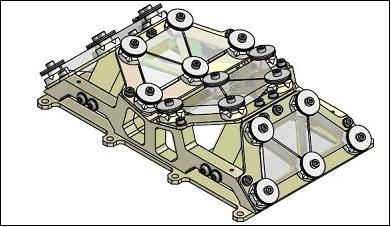
LRRA (Laser Retroreflector Array)
LRRA is a modified hexagonal array laser reflector of JAXA consisting of 12 prisms [heritage of EGS (Experimental Geodetic Satellite) also referred to as Ajisai]. The optimized wavelength is at 582 nm. LRRA has 12 corner cubes, the size is: 26 cm x 30 cm x 5.5cm, the mass is 3.1 kg. 16) 17)
The JAXA Satellite LASER Ranging facility, referred to as GUTS-SLR (Global and High Accuracy Trajectory determination System- Satellite LASER Ranging), is installed and operating at the Tanegashima Space Center, from which SOHLA-1 will be tracked as well as from other stations in the ILRS (International Laser Ranging Service) community.
1) M. Kato, S. Takayama, Y. Nakamura, K. Yoshihara, H. Hashimoto, “Road Map of Small Satellites in JAXA,” Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05.B5.6.B.01
2) H. Okubo, H. Azuma, “Activities of Small Spacecraft Systems Research Center and on-going Projects,” Proceedings of 25th ISTS (International Symposium on Space Technology and Science) and 19th ISSFD (International Symposium on Space Flight Dynamics), Kanazawa, Japan, June 4-11, 2006, paper: 2006-o-3-06v
3) Y. Nakamura, H. Hashimoto, “SOHLA-1, A Low Cost Satellite Development with Technology Transfer Program of JAXA,” 56th IAC (International Astronautical Congress) 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.6.B.08
4) W. Widjaja, H. Hashimoto, “Low Cost Satellite Development with JAXA Small Demonstration Satellite Program,” Aug. 2007, URL: http://static.scribd.com/docs/jyby8zzni48do.pdf
5) http://god.tksc.jaxa.jp/sohla/sohla.html
6) “SOHLA-1 Mission Description,” URL: http://god.tksc.jaxa.jp/sohla/files/TrackSTD.pdf
7) http://god.tksc.jaxa.jp/sohla/overview.html
8) Information was provided by Koji Nakaya of JAXA
9) Hiroaki Kawara, Naomi Murakami, Yuuta Horikawa, Koji Nakaya, Keiichi Hirako, Hidekazu Hashimoto, “The results of Small Satellite technology transfer from JAXA,” Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-VI-7
10) Hiroshi Okubo, Masakatsu Chiba, Hisao Azuma, “Development and Operation of Micro-Satellite "SOHLA-1 (Maido-1)," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.3.8
11) “SOHLA-1 Earth picture success,” URL: http://www.ne.jp/asahi/hamradio/je9pel/sohlacwe.htm
12) T. Obata, H. Itoh, Y. Kakimi, H. Okubo, “Development of Fudai Sun Sensor (FSS) - Development of Space Component by Students,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-f-25
13) Y. Kimoto, Y. Satoh, H. Tachihara, “Small total dose measurement system for SOHLA-1 and SDS-1,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-r-2-42p
14) Y. Kimoto, H. Tachihara, “Small total dose measurement system for satellite,” Proceedings of the 57th IAC 2006 (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006,, IAC-06-D5.2.03
15) Takeshi Morimoto, Zen Kawasaki, Tomoo Ushio, “An Operational VHF Broadband Digital Interferometer and Thunderstorm Observations,” 2005, URL: http://rp.iszf.irk.ru/hawk/URSI2005/pdf/E04.4(0740).pdf
16) “LRRA Description,” JAXA, URL: http://god.tksc.jaxa.jp/sohla/sohla.html
17) http://ilrs.gsfc.nasa.gov/docs/SOHLA_MRF_v2.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)