SRMSat (Sri Ramaswamy Memorial Satellite)
EO
Atmosphere
Operational (extended)
Atmospheric stability index
Quick facts
Overview
| Mission type | EO |
| Agency | SRM University |
| Mission status | Operational (extended) |
| Launch date | 12 Oct 2011 |
| Measurement domain | Atmosphere |
| Measurement detailed | Atmospheric stability index |
| CEOS EO Handbook | See SRMSat (Sri Ramaswamy Memorial Satellite) summary |
SRMSat (Sri Ramaswamy Memorial Satellite)
SRMSat is a student developed nanosatellite of SRM (Sri Ramaswamy Memorial) University, Chennai, India. Students from SRM university, located some 40 km from New Delhi, have been working on the project SRMSat since August 2008. The nanosatellite has been developed under the guidance of ISRO (Indian Space Research Organization).
The overall goal is to provide hands on experience to the students and the faculty of SRM University. The science objective of the mission is to monitor greenhouse gases (GHG), mainly carbon dioxide (CO2) in the atmosphere. The students from 12 different engineering disciplines at the university have been working closely with the ISRO expert team to develop the nanosatellite. 1) 2)

Spacecraft
The satellite is a cuboid made out of Al-6061 alloy. The structure consists of 2 frames and 4 beams which can bear the launch loads of ± 11 g longitudinal and ± 6 g lateral and frequency requirement of > 90 Hz in longitudinal and > 45 Hz in lateral directions. The mainframe has a launch size of 286 mm x 286 x 294 mm. The structure is made as a satellite bus such that it can be used for future missions. The mass of the SRMSat nanosatellite is 10.9 kg.
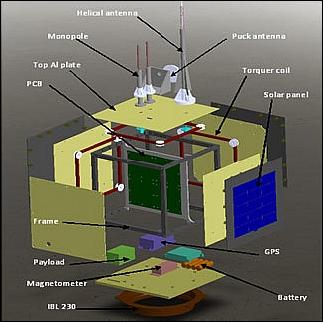
Figure 2: Exploded view of SRMSat (image credit: SRM University)
ADCS (Attitude Determination and Control Subsystem)
ADCS makes use of a magnetometer as the primary attitude sensor and SCDM as secondary attitude sensor. An onboard GPS receiver senses the position of the satellite. The actuators are three in-house designed magnetorquer coils which interact with the Earth's magnetic field to produce the required torque for correction.

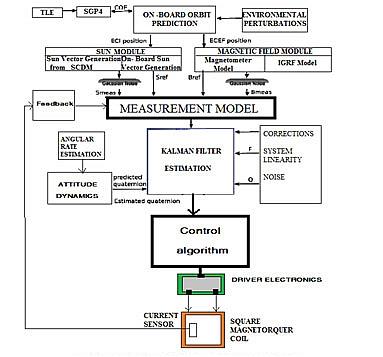
The B-dot control law is applied to reduce the angular rates during detumbling. After the satellite has detumbled, the sun model computes sun vectors as a redundant attitude determination system. The measurement model, comprised of sensory inputs and computed attitudes, is fed into the Kalman Estimator for estimation and prediction of the response of the controller. According to the error in the magnetic field value, or the sun vector error, a proportional amount of current is supplied to the magnetorquers for rotation of satellite in the required direction as attitude control.
EPS (Electrical Power Subsystem)
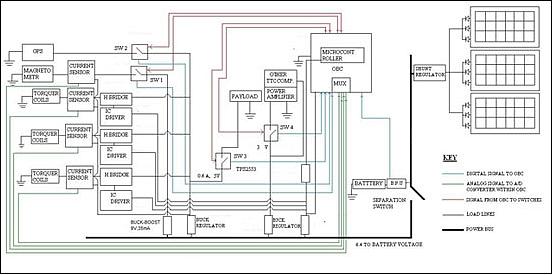
EPS is responsible for generating, conditioning and distributing electrical power to all subsystems in an efficient way. Power is generated from three body mounted solar panels. The power bus is a battery-tied bus, and the bus voltage varies from 6.4 V to 8.4 V. The power is distributed to the loads through the converters which also condition the power according to the loads. A 7.2 V, 4.4 Ahr battery is used along with a battery protection unit. Excess power, if any, is shunted by the shunt regulator. The system design provides a semi autonomous protection against any faults in the loads/subsystems with the help of current sensors and relay switches.
OBC (On-Board Computer)
The SRMSAT has single microcontroller architecture. The overall interface is shown in Figure 6. The microcontroller operates at 28.8 MHz and the peripherals include USART (Universal Synchronous Asynchronous Receiver Transmitter), DMAC (DMA Controller), SPI (Serial Peripheral Interface), SSC (Serial Synchronous Controller), RTT (Real Time Timer), RTC (Real Time Clock), TWI (Two Wire Interface), PWM (Pulse Width Modulator) and I2C. The OBC is interfaced with the payload, a space GPS receiver, magnetometer, beacon, transmitter and receiver. The storage module consists of four memory devices:- a 4 MB NVSRAM for code, a 4 MB NORFLASH for the payload data, 128 kB of EEPROM as booting memory and 1 MB of FRAM as system memory. The onboard computer will run on an in-house developed real-time operating system suite. An experiment is also being conducted on the Flash memory, the results of which will be transmitted to the ground station.
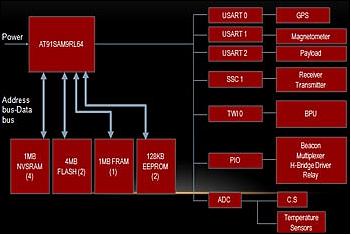
Figure 6: Block diagram of the OBC and its interfaces (image credit: SRM University)
RF Communications
The TT&C downlink is provided in the UHF band at a frequency of 434.5 MHz with a data rate of 2.4 kbit/s, the uplink is in the VHF band at 145.8 MHz with a data rate of 1 kbit/s.
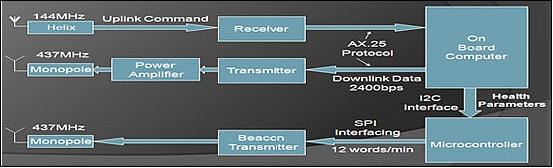
Figure 7: Block diagram of the TT&C subsystem (image credit: SRM University)
Launch
SRMSat was launched as a secondary payload on October 12, 2011 with the ISRO PSLV launcher (PSLV-C18) from SDSC-SHAR (Sriharikota), India. The primary payload on this flight was the Megha-Tropiques spacecraft of ISRO. 3)
Secondary payloads on the flight were:
• SRMSat, a nanosatellite (10 kg) of SRM (Sri Ramaswamy Memorial) University, Chennai, India.
• Jugnu (the Hindu word for firefly), is a nanosatellite (3 kg) of the Indian Institute of Technology (IIT), Kanpur.
• VesselSat-1, a microsatellite (~29 kg) of LuxSpace, Luxembourg (a company of OHB Technology AG). VesselSat-1 carries an AIS (Automatic Identification System) payload for the detection of ships in the ground segment. Orbcomm is the exclusive licensee for the AIS data collected by VesselSat-1. 4)
Orbit
Circular orbit, altitude = 867 km, inclination = 20º, period ~ 102 minutes (~14 rev./day). An equatorial region up to about ±23º can be visited at least three times daily. 5)
Sensor Complement
With climate change becoming a cause of serious concern globally, the satellite will monitor GHG - mainly carbon dioxide (CO2) - in the atmosphere in the near infrared region (900 nm to 1700 nm). A grating spectrometer is employed for monitoring earth-based sources and sinks of anthropogenic and natural sources of GHG.
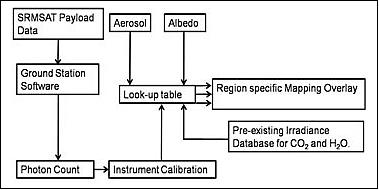
Argus Spectrometer
Figure 9 illustrates the methodology of extracting Argus data for analysis. The parameters such as albedo, aerosol and radiosonde data are being used to create a database. This will provide an integrated CO2 and H2O profile over a certain region.
References
1) http://samz3d.blogspot.com/2011/01/nano-satellite-designed-by-chennai.html
2) http://www.srmsat.in/history.html
3) http://www.isro.org/satellites/megha-tropiques.aspx
4) “ORBCOMM Announces Launch of AIS-Enabled Satellite,” Space Daily, Oct. 14, 2011, URL: http://www.spacedaily.com/reports/ORBCOMM_Announces_Launch_of_AIS_Enabled_Satellite_999.html
5) Michel Capderou, “The MT Orbit and its Angular Sampling,” Proceedings of ERB (Earth Radiation Budget)Workshop 2010, Paris France, Sept. 13-16, 2010, URL: http://meghatropiques.ipsl.polytechnique.fr/erb2010/dmdocuments/DAY3/24-MT_Paris2010_capderou.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).