SSETI (Student Space Education and Technology Initiative)
EO
ESA
Multi-purpose imagery (ocean)
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 27 Oct 2005 |
| End of life date | 27 Oct 2005 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Landscape topography, Lightning Detection |
| Instruments | APS |
| Instrument type | Other, Communications, Data collection, Lightning sensors |
| CEOS EO Handbook | See SSETI (Student Space Education and Technology Initiative) summary |
SSETI (Student Space Education and Technology Initiative) Express
Launched in October 2005, Student Space Education and Technology Initiative Express (SSETI Express) was the first spacecraft project of SSETI developed to test the feasibility of constructing a microsatellite within an 18 month time frame. The design and development of SSETI Express was a virtual collaboration between teams of students from 32 universities across Europe. Contact failed to be sustained 12 hours after launch, but despite the premature mission end, the primary mission objective to demonstrate the successful implementation of pan-European Educational initiative was considered fulfilled.
SSETI Program Background
The SSETI program was started by space-enthusiastic students from 21 European universities in 2000. They all were united by the desire and dream to work in a real space mission with the objective to build a microsatellite. A one-week kick-off meeting via the Internet from 9th to 13th October 2000 marked the beginning of the SSETI program. The first step to create the first pan-European student satellite was made. 1) 2)
Fortunately, the SSETI movement found a quick backer of their objectives in ESA, in particular in ESA's Education Office and in ESA/ESTEC - to facilitate the distributed design. In fact, ESA's Education Office founded SSETI; ESA provides the infrastructure, experts, experience, encouragement, and coordination. The head office of the SSETI association is located in France, at the University Jean Monnet, Paris. The SSETI organization was also able to recruit a number of sponsors (private and public institutions) across Europe for contributions of their program. In general the financing of satellite parts is the responsibility of each team that designs the subsystem. This way, funding is split up. Participating universities often work together with industry partners that act as sponsors for the project. Funding can be monetary as well as material, providing essential hardware, or even knowledge and expertise. The experience of hands-on projects on real space missions is an unique opportunity to enhance student motivation and literacy in the fields of space technology and science.
The students communicated by means of modern communication tools via the Internet. Regular chat sessions, e-mailings and news postings kept participating teams informed about all aspects of the project and program. Coordination between groups was carried out using a dedicated news server and weekly Internet Relay Chats (IRCs) as well as the SSETI website. Workshops took place only twice a year for each project. It was the only chance to meet the team members face to face (usually representatives of groups). Workshops were generally taking place in Noordwijk at ESA/ESTEC. The program management is centralized in the ESA Education Department at ESTEC.
From a logistic point of view, local SSETI teams (at a university) focus on a specific task or a subsystem of a spacecraft. This distribution of tasks has made the use of national or regional experience possible and benefited from the field of competence of each of the universities involved. Since the various subsystems need to work together and communicate, many interfaces and technical decisions have to be discussed and agreed to.
SSETI Express
SSETI Express was the first satellite development project within the framework of the SSETI program. The idea of SSETI Express was born in January 2004 when a group of students met at ESA/ESTEC to discuss with ESA's Education Office officials the feasibility of a microsatellite design concept derived from other student satellite projects - and launch it within a period of 1 1/2 years. This resulted in the following mission statement and objectives: 3)
1) Demonstration of transport and deployment of three CubeSat passenger payloads already in an advanced stage of development by universities. The three CubeSats are:
• XI-V (X-factor Investigator-V) of ISSL ((Intelligent Space Systems Laboratory) at the University of Tokyo, Japan 4)
• UWE-1 (Universität Würzburg's Experimentalsatellit-1), Würzburg, Germany
• NCube-2 (Norwegian CubeSat-2), Andoya Rocket Range, Norway
The CubeSat deployment was from a T-POD (Tokyo-Picosatellite Orbital Deployer) system, developed jointly by ISSL of the University of Tokyo and by UTIAS (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory), Toronto, Canada.
2) The SSETI Express satellite itself is to test and characterize a propulsion system. In this case, the satellite served as a testbed and technology demonstrator for another larger scale mission, namely ESEO (European Student Earth Orbiter), due to hitch a ride on an Ariane-5 launcher in 2006.
3) To take images of the Earth's surface
4) To involve the amateur radio community in the downlink of housekeeping and payload data.
The spacecraft was designed, built and operated by European students from 32 universities spread all over Europe, working in various teams. The telemetry is freely available on the web for download.

Spacecraft
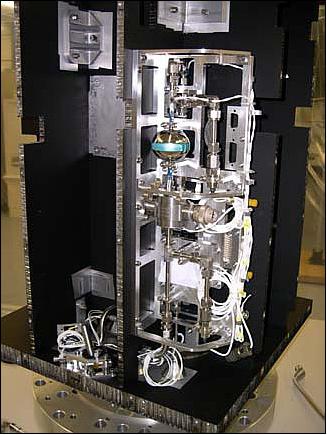
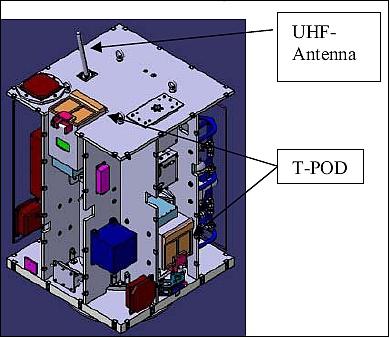
The SSETI Express microsatellite was of size 56 cm x 56 cm x 90 cm with a mass of 62 kg; its structure made of aluminium honeycomb in a “tic-tac-toe” shape. The main subsystems, derived from the ESEO design or provided through collaboration with various other educational programs, were EPS (Electrical Power System), OBC (On-Board Computer), a passive thermal subsystem, PROP, a cold gas propulsion subsystem, the communication system, a camera (CAM), T-PODs used for the deployment of cubesats and the ADCS (Attitude Determination and Control Subsystem). 5) 6) 7) 8)
The EPS was built by students from Naples, Italy (including solar cells and battery) using dual-junction PV cells. The incoming power, typically around 20 W, was conditioned to 28 V using a voltage regulator on the input. Connected to the power bus was a 28V 6.8Ah Lithium Ion battery which was connected through a step-down charging circuit and a step up discharging circuit.
The OBC, controlling all data flow in the S/C, was built by a Danish team from Aalborg University. The OBC consisted of an ARM-7 processor equipped with 2 MB of RAM, 1 MB of ROM and 4 MB of FLASH memory. All communication to other subsystems was realized through RS-232 lines configured in a star network. The data-handling software was centered around an event queue and a file system that stores telemetry in RAM and FLASH. Time-tagged commands were uploaded to the satellite; the commands placed into the time-ordered event queue.
The ADCS represents a new development by students of Aalborg University, employing a passive spacecraft stabilization technique by using a magnet and detumbling magnetorquers. It consisted of a bar magnet aligned with the longitudinal axis of the spacecraft such that the camera and antennas were roughly nadir pointing over the northern hemisphere. Two coils perpendicular to the bar magnet were used as dampers. On-line attitude determination was not required for S/C control; however, attitude data from an on-board magnetometer and from experimental sun sensors (MEMS design, 2-axis) was stored in the telemetry stream and used to reconstruct the attitude off-line using an extended Kalman filter. — Note: The sun sensors, provided free of charge, were designed and manufactured by DTU (Technical University of Denmark) of Lyngby, Denmark.
Spacecraft size | 560 mm x 560 mm x 900 mm (maximum envelope) |
Spacecraft mass, payload mass | 62 kg, 24 kg |
ADCS (Attitude Determination and Control Subsystem) | - Semi-passive stabilization (use of magnetorquer + cold gas payload) |
On-board data transfer | CAN (Controller Area Network), RS-232 |
EPS (Electrical Power Subsystem) | - Body-mounted solar panels (dual junction PV cells) |
Propulsion subsystem | 6 l, 300 bar, Nitrogen cold gas |
Thermal control | Passive |
RF communications | UHF: 437.250 MHz, 9.6 kbit/s, AX 25 protocol |

Launch
A launch of SSETI Express as a secondary payload took place on Oct. 27, 2005 on a Cosmos-3M launch vehicle from the Plesetsk Cosmodrome, Russia. The primary payloads on this flight were Beijing-1 (formerly China DMC+4) and TopSat of SSTL and QinetiQ, UK. Other secondary payloads were: Mozhayets-5 (Russia), Sinah-1 (Iran), UWE-1 (University of Würzburg), Germany, CubeSat-XI-V (University of Tokyo), Japan, NCube-2 (Norwegian CubeSat-2), Norway, and Rubin-5 (OHB, Bremen, Germany).
Orbit
Sun-synchronous orbit, altitude = 686 km, inclination = 98.3º, LTAN (Local Time on Ascending Node) at 10:30 hours.
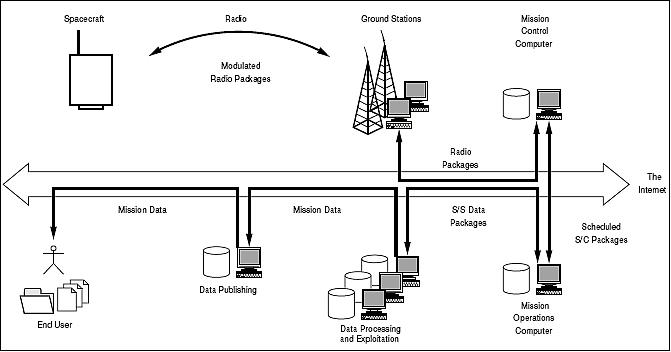
RF communications were provided in two bands: in UHF and in S-band. The UHF transceiver was the main communications channel for SSETI Express (use of AX.25 protocol encapsulated in 9600 baud FSK signals, frequency in the 435-438 MHz band, transmit power of 3 W). The S-band system consisted of 3 experimental patch antennas and an S-band voice and data transceiver supplied by AMSAT-UK. The S-band patch antennas, designed for ESEO, were being tested during this mission in downlink mode only. In periods where the satellite was not being operated by the various student teams, the S- and UHF-band systems were used to form a voice transponder system for the benefit of the radio amateur community.
Two ground stations were used during this mission: The main station was in Aalborg, Denmark, providing UHF up- and downlink and S-band downlink. The SGS (Svalbard Ground Station) in Spitzbergen (78.216º N, 20º E), on the Norwegian Svalbard archipelago, provided additional UHF up- and downlink capability on a limited access bases. The mission control center function was being provided by Aalborg University. The mission operations computer function were implemented as a Java application that can be loaded and run everywhere (internet). The processed mission data was stored in Vienna; however, a special version of the database was kept in Paris together with a web-site that allows everyone to extract processed telemetry, so that interested parties may see the temperatures and other characteristics of the spacecraft.
Mission Status
After launch contact was quickly established and subsystems started to be tested. Already on the second pass over the primary ground station, it was evident that the battery voltage had dropped. The satellite continued working flawlessly but only on the battery power, the power from the solar cells never reached the batteries. After approximately 12 hours the SSETI Express satellite went silent. 9) 10) 11)
Some items of the event sequence were (see reference 20):
• Deployment of SSETI Express from the upper stage of the Cosmos-3M launch vehicle at about 47 minutes after launch
• The primary ground station established contact with SSETI Express on the first pass of the spacecraft (42 minutes after separation/deployment from the launch vehicle). The deployment of the CubeSats took place on first contact.
• A minute later, the first nominal mode beacon was received on schedule by the primary ground station and by several radio amateur stations
• The Tokyo ground station established a first contact with their XI-V CubeSat shortly thereafter (40 minutes)
• A first contact was made with the UWE-1 CubeSat by the ground station of Würzburg University.
• Unfortunately, a contact with NCube-2 could not be established.
• The primary ground station monitored the spacecraft housekeeping data on all contacts and noticed a considerable decline in battery power.
From post-flight analysis, the most likely cause for the failure is an incorrect timer setting of the EPS which prevented, as designed (for the safety of the other passengers on the launch vehicle, mainly regarding the deployment of the CubeSat passengers), activation of the satellite until 65 minutes later.
1) Despite the premature mission end of SSETI Express, the mission is regarded a full success. The primary mission objective was fulfilled many times over during the design, construction, verification, launch campaign and operations of the spacecraft: To demonstrate the successful implementation of this pan-European Educational initiative and therefore encourage, motivate and challenge students to improve their education and literacy in the field of space research and exploration.
2) The secondary mission objective was mostly fulfilled with the deployment of the XI-V CubeSat from the University of Tokyo, Japan, and the UWE-1 CubeSat from the University of Würzburg, Germany. These two spacecraft subsequently embarked on their own successful missions.
Note: The deployment of the NCube-2 CubeSat from the Andøya Rocket Range, Norway, was problematic. It is possible that NCube-2 remained attached to SSETI Express because of either a malfunction in the NCube-2 antenna deployment mechanism, or in the SSETI Express T-POD.
3) Several important mission milestones were met successfully:
- Hand-over of the spacecraft to the launch authority
- Reception of the first beacon from the spacecraft precisely on schedule
- Two-way communication with the spacecraft was established very quickly
- Significant amounts of housekeeping telemetry from orbit were downlinked
- Flight verification of several subsystems for future missions
4) Excellent cooperation between the SSETI community and the Amateur Radio community, enabling:
- The inclusion of flight hardware for the mutual benefit of both parties
- Extensive educational exposure to SSETI teams
- A virtual global ground station (proven invaluable during the mission)
- SSETI Express received the OSCAR number, X0-53, assigned to SSETI Express by AMSAT
5) SSETI Express encountered an unusually fast mission development: less than 18 months from kick-off in January 2004 to flight-readiness. This is attributed to the high motivation and enthusiasm in the SSETI community.
Sensor Complement
CAM (CMOS/APS Digital Camera)
Provided by a team of Aalborg University. The prime objective was to take imagery of Earth's surface at a medium spatial resolution of about 100 m. A secondary goal was to measure starlight intensities. 12)
Note: CAM on SSETI Express is actually a refitted version of the camera (engineering model) from the AAUSat CubeSat, launched June 30, 2003 (first multiple CubeSat launch). Following launch, the satellite was alive for two and a half months before the battery had lost too much capacity to continue operations. During this time only a limited amount of data was successfully downlinked from the satellite, due to an undisclosed problem on the satellite transmitter, resulting in very weak signal transmissions. Since the AAUSat mission was only a partial success, CAM was actually never tested in orbit.
CAM on SSETI Express actually consisted of the lens system and camera PCB (Printed Circuit Board) from the CubeSat as well as the CubeSat OBC for controlling the camera. In addition an interface board was developed to make it able to talk to the SSETI Express OBC and to get power from the SSETI Express EPS. The actual camera PCB was developed by Devitech, a spin-off company of Aalborg University, all other systems were designed and built by students.
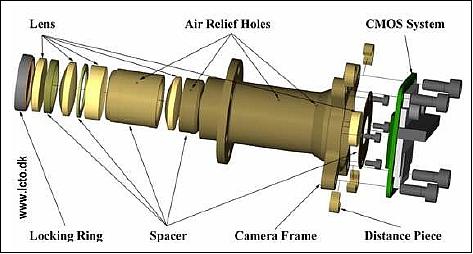
CAM was based on the Kodak MCM20027 camera chip [KAC-1310, 1280 x 1024 pixel SXGA, a solid-state ACI (Active CMOS Imager), 24 bit color imagery, a camera on chip]. An ability existed to download ”thumbnails” (160 x 128 and 320 x 256 pixels) of the full image frame to evaluate the quality prior to downloading the full frame. The ground resolution was about 100m/pixel (from an 650 km orbit); the source data was provided with a color depth of 24 bit, and Bayer encoded. The lense system was made of titanium with radiation-hardened lenses. The camera lens system was designed and developed at AAU; it had an aperture diameter of 2 cm and a total length of 5 cm (FOV of 10º). Each image had a volume of 2.6 MByte.
CAM is mounted on the the top-plate of the satellite. It is able to take snapshots of the Earth when the satellite is at northern latitudes; the primitive attitude control system on SSETI- Express doesn't provide a good pointing accuracy.
PROP (Propulsion Subsystem)
PROP was flown as a demonstration payload on SSETI Express. It was provided by the University of Stuttgart, Germany (team of 15 students). PROP was a cold-gas propulsion system; in effect a lighter version than the one projected for ESEO with only 1 tank instead of 4. As a consequence, PROP on SSETI Express lacked the capability of orbit control. The overall objective was to space qualify the PROP design for the upcoming ESEO mission.
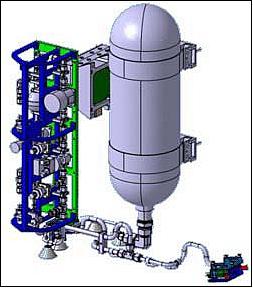
The PROP unit consisted of a one pressure tank with about 2 kg of gaseous nitrogen content at a pressure of 300 bar as propellant for the entire mission, a total of six valves, two pressure regulators for flow control, 4 miniature thrusters, three pressure transducers, and 10 temperature sensors. The pressure was lowered in two consecutive steps from 300 bar to 17 bar and then to 2.7 bar. Each of the 4 thrusters provided a thrust of 130 mN when activated. The minimum impulse time was 40 ms. Full 3-axis control of the spacecraft was provided. This cold gas system allowed for a delta v of about 10 m/s. - However, in the SSETI Express mission, PROP was only be tested on functionality and performance, while the actual attitude control was achieved through passive and active magnetic devices. 13) 14) 15)
While ADCS of Aalborg University was providing the function of primary attitude control, PROP was also tested as a backup attitude provider using ACS (Attitude Control Subsystem). PROP features PMS (Propellant Management Subsystem) for the regulation of all pressure regulators and valves. The pressure tank was a commercial product of MCS (Mannesmann Cylinder Systems) made of CFRP (Carbon Fiber Reinforced Plastic) with an empty tank mass of 2.5 kg and a volume of 6 liter.
CubeSat Deployment
The three CubeSat passengers (i.e., picosatellites) were: UWE-1 (Universität Würzburg Experimentalsatellit-1), Würzburg, Germany; XI-V (X-factor Investigator-V) of the University of Tokyo, Tokyo, Japan; and NCube-2 (Norwegian CubeSat-2) from Norway. The deployment of the CubeSats required T-POD (Tokyo-Picosatellite Orbital Deployer), provided jointly by Japan (University of Tokyo) and Canada (University of Toronto).
Note: T-POD was already developed and used to eject the XI-V CubeSat from the Rockot launch vehicle in a multiple CubeSat launch (6 picosatellites) on June 30, 2003 from Plesetsk, Russia. The T-POD development is not regarded as a competition to P-POD (Poly-Picosatellite Orbital Deployer) of CalPoly; rather, it is considered a complementary element in case of need being offered by a potential launch opportunity.

SSETI Express happened to be the first student satellite to be designed, developed, and integrated in a distributed international environment (over the Internet).
Subsystem (affiliation) | Comment |
ADCS (Aalborg, Denmark) | ADCS has 2 parts: The “attitude control system” uses semi-active magnetic stabilization. The attitude of the spacecraft is therefore stabilized about two axes with one remaining, but fully characterized, degree of freedom about the z-axis. The pointing error is expected to be lower than five degrees. The “attitude determination system” consists of a pair of sun sensors [developed by DTU(Technical University of Denmark)] and a 3-axis magnetometer, allowing determination of the attitude with respect to the magnetic field lines of the Earth and the sun. |
CAM (Aalborg, Denmark) | CAM is based on a CMOS sensor and an instrument control unit. In order to adjust for varying brightness, the camera can be fully calibrated in orbit. It is adapted from the AAUSat-1 picosatellite mission. |
EPS (Naples, Italy) | Ten separate strings, each of 15 triple-junction Gallium-Arsenide (Ga-As) photo-voltaic cells with an estimated efficiency of around 22%, are used. |
Magic (Lausanne, Switzerland) | The PROP control unit is referred to as the 'Magic' box. This subsystem processes commands related to the propulsion system, controls the thruster valves and performs data acquisition from the various thermistors and pressure transducers. It is also designed to provide a high current pulse to detonate the pyrotechnic valve. |
OBC (Aalborg, Denmark) | The OBC is an AMTEL ARM-7 processor equipped with 2 MB of RAM, 1 MB of ROM and 4 MB of FLASH memory. |
PROP (Stuttgart, Germany) | PROP is an attitude control cold-gas system with four low-pressure thrusters, fed by a pressure regulation system. The tank contains six liter of gaseous nitrogen at a pressure of 300 bar. Pressure is managed by a series of valves and regulators and secured for safety during the launch by a pyrotechnic valve. These components are connected by stainless-steel high-pressure tubing. |
S-band antenna (Wroclaw, Poland) | The S-band patch antennas are adapted from the ESEO microsatellite. A set of three directional patch antennas are used, outputting a total of 3 W of circularly polarized radiation at 2401.84 MHz. The half-power beam width is about 70º. The main lobes are directed along the spacecraft's z-axis, which faces nadir during transit of most of the northern hemisphere, and along the spacecraft's positive and negative x-axis. |
S-band TX (AMSAT, UK) | Radio amateurs from the United Kingdom have developed the S-Band transmitter (S-Band TX). It serves a dual function providing both high-speed mission data downlink at 38.400 kbit/s and also, in combination with the UHF system, a single-channel audio transponder which is freely available to the global amateur radio community whenever the other payloads are not in use. |
Structure (Porto, Portugal) | The primary load-bearing spacecraft structure consists of aluminium honeycomb panels configured in a similar way to the game known as tic-tac-toe or noughts and crosses. The secondary structure consists of 1 mm aluminium outer lateral panels, serving as mounting surfaces for the solar cells, sun sensors and other lightweight equipment. |
T-PODs (Toronto, Canada) | Each of the three Tokyo Pico-satellite Orbital Deployers (T-PODs) is used to store a passenger CubeSat during the launch and to deploy them from SSETI Express once orbit is achieved. They have an interface to the ground support equipment that allows the CubeSat passengers to be charged and arms the release mechanism. |
UHF (Radio amateur, Hohenbrunn, Germany) | The UHF unit contains a radio and a Terminal Node Controller (TNC) and is the spacecraft's primary communications system. It provides uplink of telecommands from the ground station, audio uplink from amateur radio users and downlink of mission data at 9600 bit/s, all via a top-mounted rigid monopole antenna. |
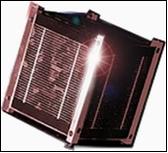
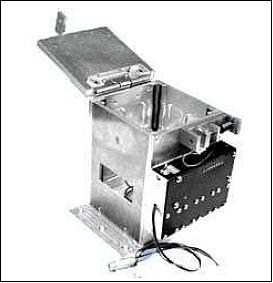
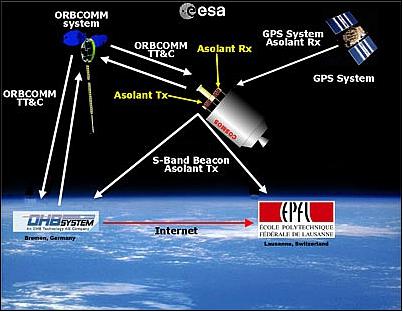
Asolant (Advanced Solar Antenna)
Asolant was an in-flight demonstration experiment of innovative combined antenna/solar array technology of ESA. ESA partners involved with the Asolant project were: EPFL/LEMA (École Polytechnique Fédèrale de Lausanne/Laboratoire d'Electromagnétisme et d'Acoustique), Switzerland; HTS (High Technology Systems AG), Effretikon, Switzerland; OHB-System AG of Bremen, Germany; and DLR (German Aerospace Center).
The objective was to implement two spacecraft components (namely antenna and solar array) as a single unit resulting in a substantial mass and cost savings for future missions. Most spacecraft use both solar arrays, to generate electrical power for their systems, and antennas, for communication with the ground and possibly as part of their mission. On large spacecraft, the various antennas compete with the solar generators for available space. On small satellites, the integration of solar arrays and antennas could lead to reductions in spacecraft size, mass and cost. 17) 18) 19)
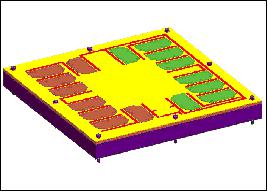
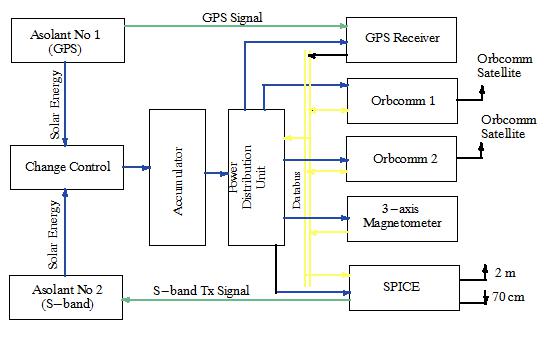
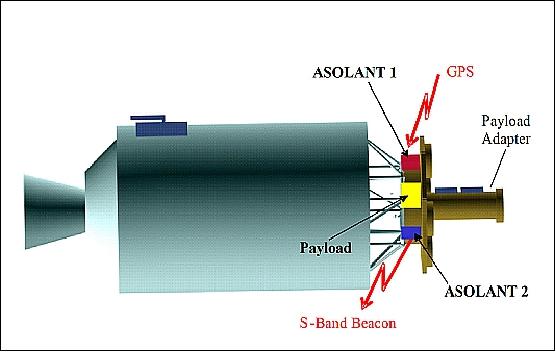
Two different antennas were manufactured and integrated with Gallium Arsenide based solar panels. One antenna was designed to receive signals from GPS (Global Positioning System) satellites, while the second transmitted an S-band beacon signal to the ground. In this way, both the transmitting and receiving capabilities of Asolant were demonstrated in a real, in-flight configuration.
The structures of the solar panels used for the two antennas were identical. The panels were based on an epoxy FR4 plate where the solar cells interconnecting lines are etched. The solar cells were directly glued on the FR4 and connected to the lines with small interconnecting strips. The cells were connected in two strings each providing 9 V and 500 mA. At the center of the panel, a zone of 170 mm x 170 mm was left free of solar cells to allow the antenna radiation.
The demonstration platform was the payload adapter of the Cosmos-3M vehicle that launched SSETI Express. The Asolant experiment was attached to the payload adapter, which was mounted on the upper stage of the launch vehicle to support SSETI Express and its fellow passengers during launch. After separation of all the components of the launcher payload, the upper stage of the rocket was intended to remain in orbit for some months.
The day after launch, the first signal was received from Asolant. While the payload adapter remained in orbit, the in-flight experiment will continue, collecting information about the performance of the test components. In particular, data concerning the evolution of the solar panel performance and the quality of the GPS reception will be transmitted to the ground station, allowing continuous monitoring of the status of Asolant.
Projects within the SSETI Program
As of 2006, there are three projects, supported by the Education Department of ESA, representing the past, the current and the future projects within the SSETI program. These are: 20)
• SSETI Express. A launch took place on Oct. 27, 2005 on a Cosmos-3M launcher from Plesetsk, Russia.
• ESEO (European Student Earth Orbiter). A launch is planned on an Ariane-5 vehicle in 2009.
• ESMO (European Student Moon Orbiter). In March 2006, the Education Department of ESA approved the ESMO mission proposed by the SSETI association for a Phase A feasibility study. Current plans call for a launch in 2011. ESMO will conduct experiments on its way to the moon as well as when lunar orbit is achieved.
References
1) http://www.esa.int/esaCP/SEMKINZ990E_index_0.html
2) “The History behind SSETI Express,” URL: http://paginas.fe.up.pt/ssetiexpress/history_en.html
3) L. Alminde, M. Bisgaard, N. Melville, J. Schaefer, “The SSETI-express Mission: From Idea to Launch in one and a Half Year,” Proceedings of 2nd International Conference on Recent Advances in Space Technologies (RAST), Istanbul, Turkey, June 9-11, 2005
4) Y. Nakamura, T. Eishima, M. Nagai, R. Funase, et al., ”University of Tokyo's Ongoing Student-Lead Picosatellite Projects - CubeSat XI and PRISM,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA-4.11.4.06
5) M. De Cock, N. Melville, P. Willekens, “SSETI Express - A Motivational, Technical and Logistical Precursor to Future SSETI Missions,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-P.5.b.05
6) L. Mehnen, P. Slowik, F. Rattay, “Building a Satellite over the Internet,” Proceedings of RAST (Recent Advances in Space Technologies), Istanbul, Turkey, June 9-11, 2005
8) Lars Alminde, Morten Bisgaard, Neil Melville, Jörg Schaefer, “The SSETI-express Mission: From Idea to Launch in one and a Half Year,” URL: http://vbn.aau.dk/fbspretrieve/2373285/the_SSETI_mission.pdf
9) Flight Analysis Team: Lars Alminde, Morten Bisgaard, Martin Green, Fulvio Infante, Martin Kragelund, Neil Melville, Tomasso Pitteria, Jörg Schaefer, Kresten Sørensen, “SSETI Express Flight Analysis Summary - Successes and Failures,” Workshop at ESTEC, November 21-23, 2005
10) “SSETI Express: power problem,” Oct. 31, 2005, URL: http://www.esa.int/SPECIALS/sseti_express/SEM9NC638FE_0.html
11) Karol Kardach, Damian Wydymus, “Summary of SSETI Express satellite mission- gained experience,” Journal of Telecommunications and Information Technology, 1/2007, pp.69-71, URL: http://www.docstoc.com/docs
/7021777/Summary-of-SSETI-Express-satellite-mission-%E2%80%93-gained-experience
12) Information provided by Morten Bisgaard of Aalborg University, Aalborg, Denmark
13) Information provided by Hanno Ertel, University of Stuttgart, Stuttgart, Germany
14) Morten Bülk, “Design and construction of a cold-gas attitude control system for a student microsatellite - part 1,” STEC (Space Technology Education Conference) 2005, April 6-8, 2005, Aalborg University, Aalborg, Denmark; http://www.stec2005.space.aau.dk/getpdf.php?id=41
15) http://www.uni-stuttgart.de/sseti/de/ourwork.php
16) http://www.esa.int/SPECIALS/sseti_express/SEM2Z1808BE_0.html
17) http://space.epfl.ch/webdav/site/space/shared
/page_media/research_projects/Summary_ASOLANT_24aug2006.pdf
18) “In-flight demonstration of innovative combined antenna/solar array,” ESA, Oct. 31, 2005, URL: http://www.esa.int/esaCP/SEM8W8638FE_index_0.html
19) S. Vaccaro, C. Pereira, J. R. Mosig, P. de Maagt, ” Flight Models Of Advanced Solar Antennas `Asolant',” 28th ESA Antenna Workshop on Space Antenna Systems and Technologies, Noordwijk, The Netherlands, May 31- June 3, 2005
20) T. Viscor, “SSETI - Past, Present and Future,” Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-VII-8
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).