STSat-3 (Science and Technology Satellite-3)
EO
Mission complete
Imaging multi-spectral radiometers (vis/IR)
Land
Quick facts
Overview
| Mission type | EO |
| Agency | KARI, SI, KASI |
| Mission status | Mission complete |
| Launch date | 21 Nov 2013 |
| End of life date | 31 December 2015 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation |
| Measurement detailed | Land surface imagery, Land cover |
| Instruments | COMIS, MIRIS |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Space environment |
| CEOS EO Handbook | See STSat-3 (Science and Technology Satellite-3) summary |
STSat-3 (Science and Technology Satellite-3)
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References
STSat-3 is a microsatellite (actually a minisatellite) mission of KARI (Korea Aerospace Research Institute), Daejeon, Korea - representing the third experimental microsatellite of the STSat series designated in the long- term plan for Korea's Space Development by the Ministry of Science and Technology (MOST) of Korea. The project was initiated in October 2006 and actually started in mid-2007. Project participants are: KASI, SaTReC, KARI, KBSI (Korea Basic Science Institute), SNU (Seoul National University), ISAS/JAXA Green Optics, Genesia.
Parameter / Mission | STSat-1 | STSat-2 | STSat-3 |
Launch date | Sept. 26, 2003 | Aug. 25, 2009 | Nov. 21, 2013 |
Design life | 2 years | 2 years | 2 years |
Orbit | SSO, 690 km | 300 km x 1500 km (elliptical orbit) | SSO, 600 km |
S/C mass, power (max) | 106 kg, 180 W | 100 kg, 160 W | 175 kg, 275 W @ EOL |
S/C size | 665 mm x 551 mm x 830 mm | 620 mm x 700 mm x 900 mm | 1024 mm x 1030 mm x 885 mm |
Pointing accuracy | < 0.2º | < 0.15º | < 0.13º |
Sensor complement | FIMS (Far-UV Imaging Spectrograph) SPP (Space Physics Package) | DREAM (Dual-channel Radiometers for Earth and Atmospheric Monitoring) | MIRIS (Multi-purpose Infrared Imaging System) |
The STSat-3 requirements call for:
• A science mission to provide astronomical infrared imagery of the galaxy and of the cosmic background
• An Earth observation mission to provide infrared and hyperspectral imagery for Earth environmental monitoring, land classification research, and monitoring of water quality.
• In addition, STSat-3 is a technology demonstration (engineering objective) mission with the introduction of a composite bus structure, Li-ion battery, LEON-3 on-board computer, and a HPS (Hall-thrust Propulsion Subsystem) with a thrust of about 10 mN. 1) 2)

Spacecraft
STSat-3 is being designed and developed at SaTReC (Satellite Technology Research Center) of KAIST (Korea Advanced Institute of Science and Technology), Daejeon, Korea. A multi-functional composite bus structure is being used.
ACS (Attitude Control Subsystem): The spacecraft is 3-axis stabilized with a pointing accuracy of 0.13º. Attitude sensing is provided by CSS (Coarse Sun Sensors)), 4 gyros, two star trackers (ST), and TAM (Tri Axis Magnetometer). A GPS receiver provides on-board timing and orbit determination. Actuation is provided by RWA (Reaction Wheel Assembly) 4 reaction wheels. The spacecraft is able to provide cross-track pointing of ± ??º for event monitoring.
The CDS (Command & Data Handling Subsystem) is composed of the OBC (On-Board Computer), MMU (Mass Memory Unit), and TCTM (TeleCommand & TeleMetry Unit). The CDS is an on-orbit reconfigurable subsystem which is based on the Leon3-FT (Fault Tolerant) processor by uploading FPGA code and flight software code. This feature permits to modify, upgrade and even change the system during the mission. Use of TMR (Triple Module Redundancy) technology for SEU SEU(Single Event Upset) mitigation and implementation of the configuration memory scrubbing algorithm to protect the FPGA and use of the EDAC (Error Detection and Correction) algorithm for memory protection. 3)
The CDS manages the spacecraft and payload according to the schedule set by the ground station, and provides the operating environment for the AOCS flight software. CDS stores payload data and sends them to the ground station via X-band channel on demand from the ground station. Many IPs are ported such as the memory controller, the low speed (RS422 38.4 kbit/s) and the high speed (LVDS, 1.2 Mbit/s) communication controller and SpaceWire IP with Leon3-FT Core (Figure 3).
Reconfigurable design: A system-on-a-chip realizing the main functions of an on-board computer is an important step towards further small satellites. Reconfigurable computing is based on the idea to accelerate the computing intensive parts of algorithms by using application specific circuits. But in contrast to the ASIC approach, the circuits are implemented in reconfigurable logic. Usually, a reconfigurable computing system consists of a general purpose CPU, which is coupled to a reconfigurable device, for instance an FPGA.
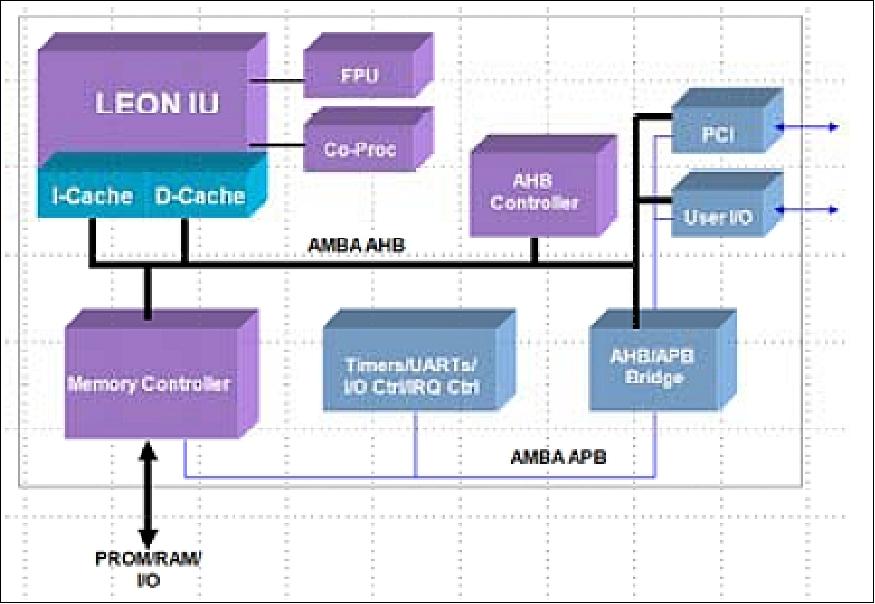

Legend to Figure 3: SPR (Solar Power Regulator); DAC (Data Acquisition); GPSR (GPS Receiver).
The RTEMS (Real-Time Operating System) is used in the OBC, an open source RTOS providing a powerful development and run-time environment that promotes the production of efficient real-time embedded applications.
The MMU has a storage capacity of 32 Gbit for the payload source data (MIRIS and COMIS). The FPGA directly controls the data reception from the two payloads with a maximum data rate of 100 Mbit/s.
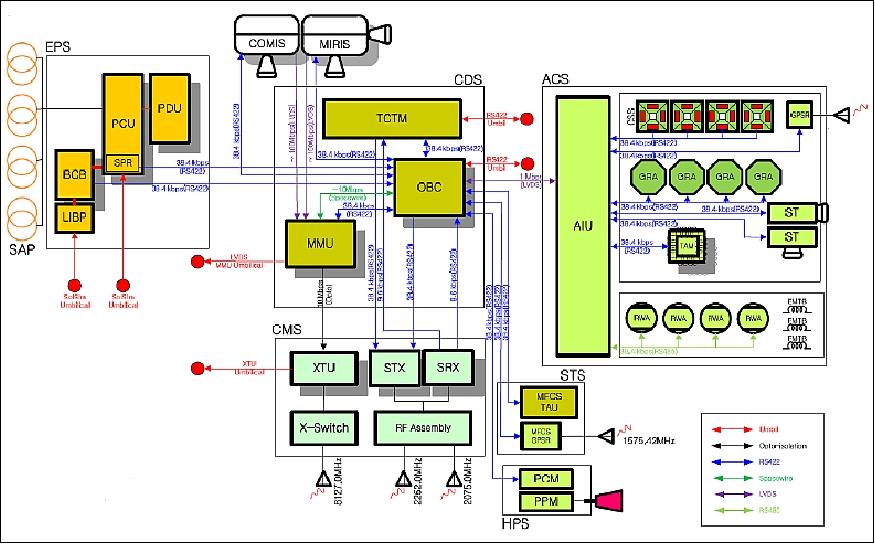
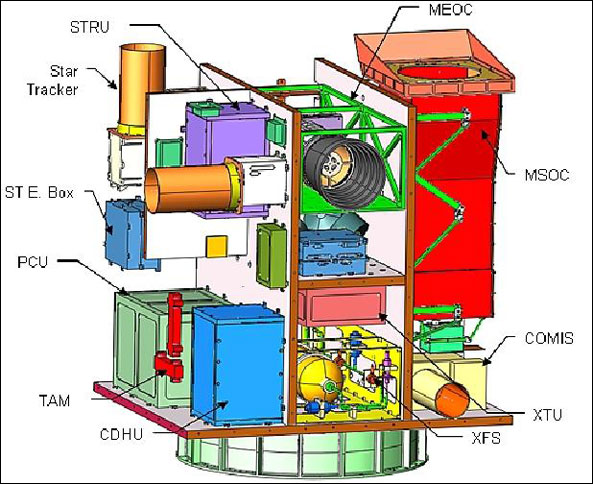
Legend to Figure 4: PCU (Power Control Unit); PDU (Power Distribution Unit); OBC (On-Board Computer); MMU (Mass Memory Unit); AIU (Attitude Interface Unit); XTU (X-band Transmitter Unit); STRU (S-band Transmitter and Receiver Unit); ACS (Attitude and Control Subsystem); CDS (Command & Data Handling Subsystem); CMS (Communications Subsystem); STS (Structure Subsystem).
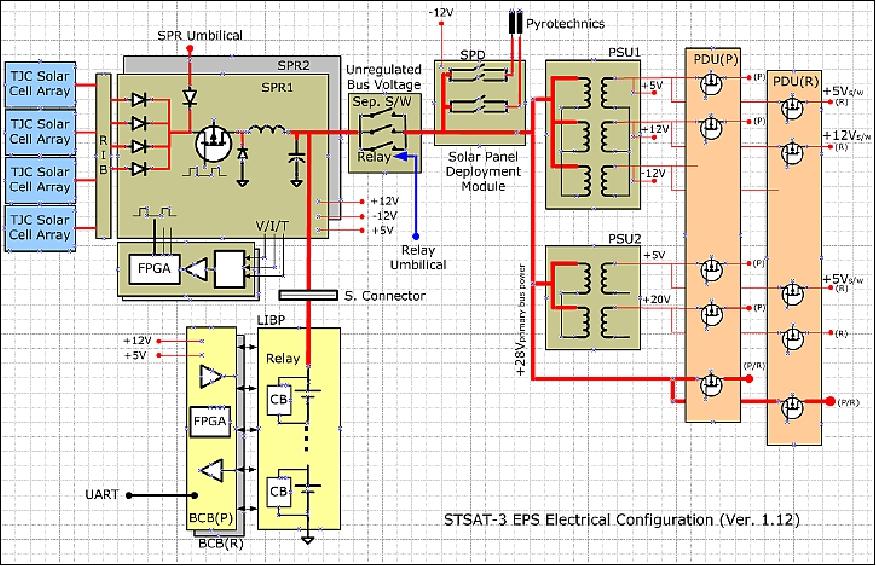
EPS (Electrical Power Subsystem): EPS is composed of solar arrays, an SPR (Solar Power Regulator) converting the solar power voltage to an unregulated bus voltage, the Li-ion battery (~20 Ah), a solar panel deployment (SPD) module which signal the solar panel deployment after orbit injection, a PSU (Power Supply Unit) which generates regulated +5 V ±12 V, +20 V from the unregulated bus voltage, a PDU (Power Distribution Unit) which control the on-board power flow. 4)
The bus total power is~286 W and the total power requirement of STSat-3 is around 679 W including the hall thruster operation. However, the HPS (Hall-thrust Propulsion Subsystem) is only operated on a short-time basis (under 10 minutes) to evaluate its functionality without disturbing the attitude of satellite after all mission operation is completed.
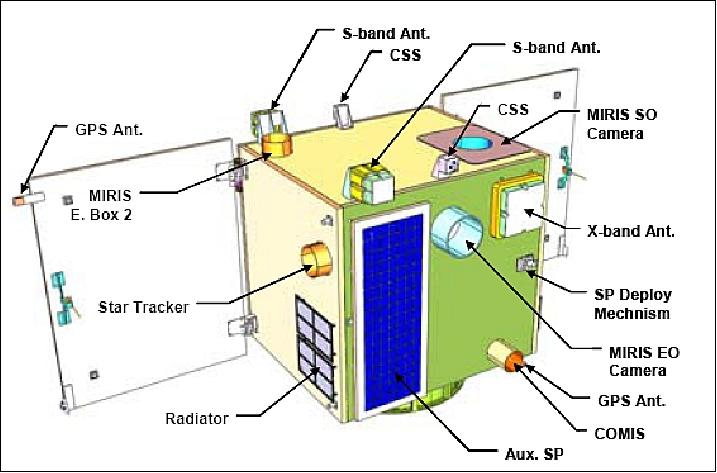
STSat-3 is a minisatellite with a mass of ~ 175 kg and dimensions of 102.4 cm x 103 cm x 88.5 cm in a stowed (launch) configuration. The design life is 2 years. 5)

Launch
STSat-3 was launched on Nov. 21, 2013 (07:10:11 UTC) as a primary payload on a Dnepr-1 vehicle from the Dombarovsky (Yasny Cosmodrome) launch site, Russia. DubaiSat-2 of EIAST, Dubai was another primary payload on this flight. The launch provider was ISC Kosmotras. 6) 7) 8) 9)
The secondary payloads on this flight were:
• SkySat-1 of Skybox Imaging Inc., Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• WNISat-1 (Weathernews Inc. Satellite-1), a nanosatellite (10 kg) of Axelspace, Tokyo, Japan.
• BRITE-PL-1, a nanosatellite (7 kg) of SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland.
• AprizeSat-7 and AprizeSat-8, nanosatellites of AprizeSat, Argentina (SpaceQuest)
• UniSat-5, a microsatellite of the University of Rome (Universita di Roma “La Sapienza”, Scuola di Ingegneria Aerospaziale). The microsatellite has a mass of 28 kg and a size of 50 cm x 50 cm x 50 cm. When on orbit, UniSat-5 will deploy the following satellites with 2 PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployer) of GAUSS:
- PEPPOD 1: ICube-1, a CubeSat of PIST (Pakistan Institute of Space Technology), Islamabad, Pakistan; HumSat-D (Humanitarian Satellite Network-Demonstrator), a CubeSat of the University of Vigo, Spain; e-st@r-2 (Educational SaTellite @ politecnico di toRino-2), of Politecnico di Torino, Italy; PUCPSat-1 (Pontificia Universidad Católica del Perú-Satellite), a 1U CubeSat of INRAS (Institute for Radio Astronomy), Lima, Peru; Note: PUCPSat-1 intends to subsequently release a further satellite Pocket-PUCP) when deployed on orbit. 10)
- PEPPOD 2: Dove-4, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
MRFOD (Morehead-Roma FemtoSat Orbital Deployer) of MSU (Morehead State University) is a further deployer system on UniSat-5 which will deploy the following femtosats:
- Eagle-1 (BeakerSat), a 1.5U PocketQub, and Eagle-2 ($50SAT) a 2.5U PocketQub, these are two FemtoSats of MSU (Morehead State University) and Kentucky Space; Wren, a FemoSat (2.5U PocketQub) of StaDoKo UG, Aachen, Germany; and QBSout-1, a 1U PocketQub testing a finely pointing sun sensor.
• Delfi-n3Xt, a nanosatellite (3.5 kg) of TU Delft (Delft University of Technology), The Netherlands.
• Triton-1 nanosatellite (3U CubeSat) of ISIS-BV, The Netherlands
• CINEMA-2 and CINEMA-3, nanosatellites (4 kg each) developed by KHU (Kyung Hee University), Seoul, Korea for the TRIO-CINEMA constellation.
• GOMX-1, a 2U CubeSat of GomSpace ApS of Aalborg, Denmark
• NEE-02 Krysaor, a CubeSat of EXA (Ecuadorian Civilian Space Agency)
• FUNCube-1, a CubeSat of AMSAT UK
• HiNCube (Hogskolen i Narvik CubeSat), a CubeSat of NUC (Narvik University College), Narvik, Norway.
• ZACUBE-1 (South Africa CubeSat-1), a 1U CubeSat (1.2 kg) of CPUT (Cape Peninsula University of Technology), Cape Town, South Africa.
• UWE-3, a CubeSat of the University of Würzburg, Germany. Test of an active ADCS for CubeSats.
• First-MOVE (Munich Orbital Verification Experiment), a CubeSat of TUM (Technische Universität München), Germany.
• Velox-P2, a 1U CubeSat of NTU (Nanyang Technological University), Singapore.
• OPTOS (Optical nanosatellite), a 3U CubeSat of INTA (Instituto Nacional de Tecnica Aerospacial), the Spanish Space Agency, Madrid.
• Dove-3, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
• CubeBug-2, a 2U CubeSat from Argentina (sponsored by the Argentinian Ministry of Science, Technology and Productive Innovation) which will serve as a demonstrator for a new CubeSat platform design.
• BPA-3 (Blok Perspektivnoy Avioniki-3) — or Advanced Avionics Unit-3) of Hartron-Arkos, Ukraine.
Deployment of CubeSats: Use of 9 ISIPODs of ISIS, 3 XPODs of UTIAS/SFL, 2 PEPPODs of GAUSS, and 1 MRFOD of MSU.
Orbit
Sun-synchronous near-circular orbit, altitude = 600 km, inclination = 97.8º, LTDN (Local Time on Descending Node) = 10:30 hours. The effective revisit time of DubaiSat-2 is < 8 days for any ground location with a body-pointing capability of the spacecraft (up to ±45º roll tilt, ±30º pitch tilt).
RF Communications
Use of S-band transmissions for TT&C applications at data rates of 1.2 or 9.6 kbit/s in uplink and 9.6 or 38.4 kbit/s in downlink. The payload data is transmitted in X-band (8127 MHz) at a data rate of 10 Mbit/s using QPSK (Quadra-Phase Shift Keying) modulation. The output power of XTX (X-band Transmitter) is +30 dBm (1 W). 11)


Mission Status
• Dec. 2015: Korea’s STSAT-3 Ends Its Mission. The Ministry of Science, ICT and Future Planning of Korea (MSIP) and KAIST (Korea Advanced Institute of Science and Technology ) have announced that STSAT-3 (Science and Technology Satellite-3), launched on November 21, 2013, has completed its observation mission. The ST SAT-3 orbited 10,500 times around the 600 km altitude of the sun-synchronous orbit, observing the atmosphere and monitoring the environment, as well as observing the Galaxy. With a two-year operational lifetime, the satellite completed its observation mission.
• The STSat-3 spacecraft and its payload are operating nominally in 2015.
• The following MIRIS images (Figures 11 to 14) were obtained in the period 2014-2015 and were taken from Ref. 18).
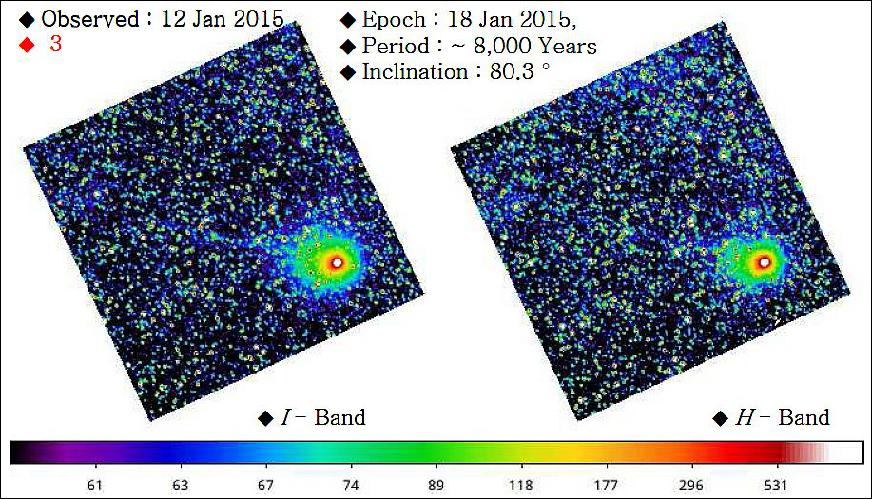
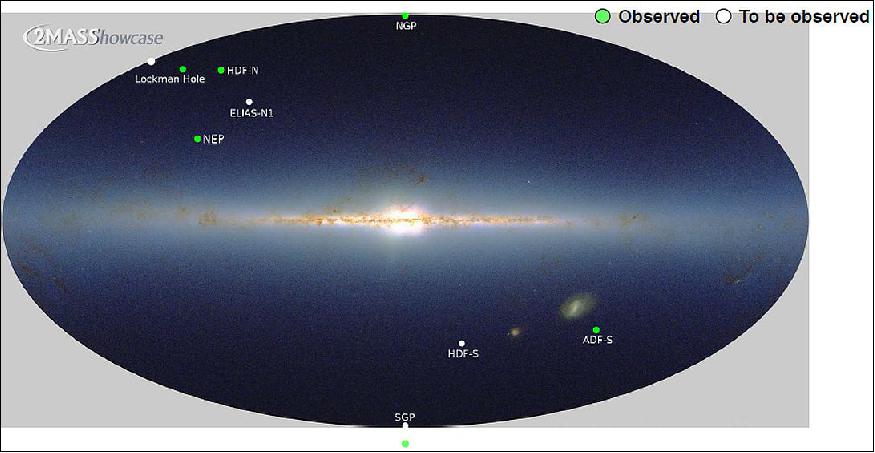
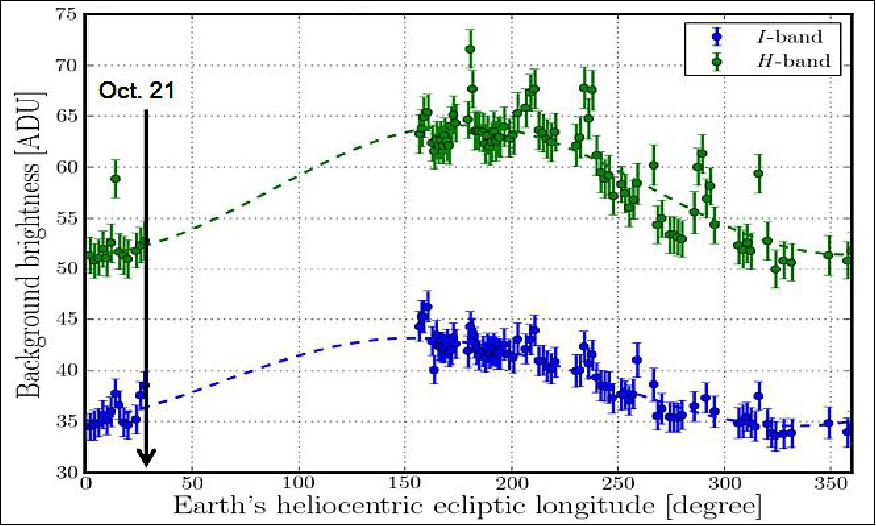
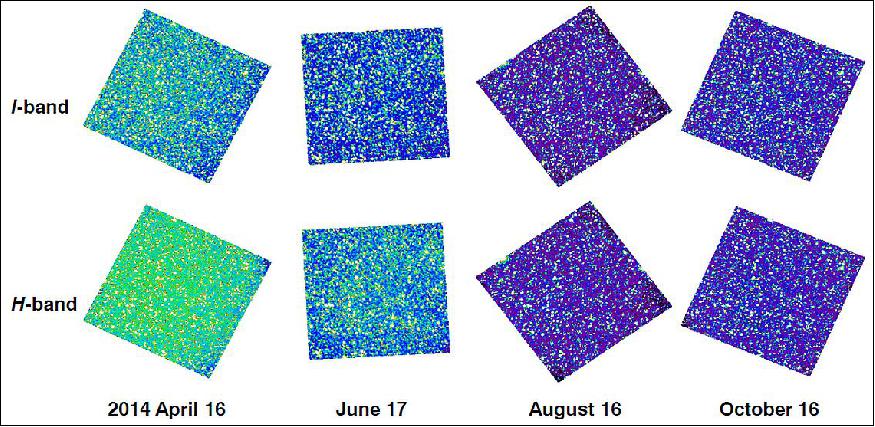
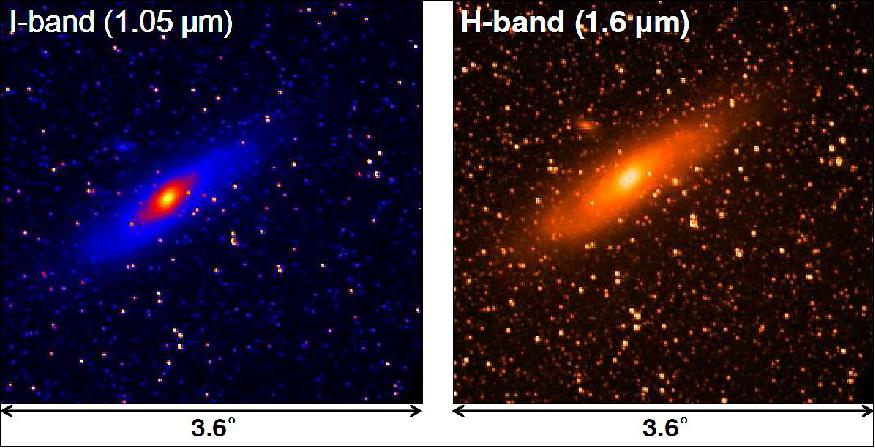
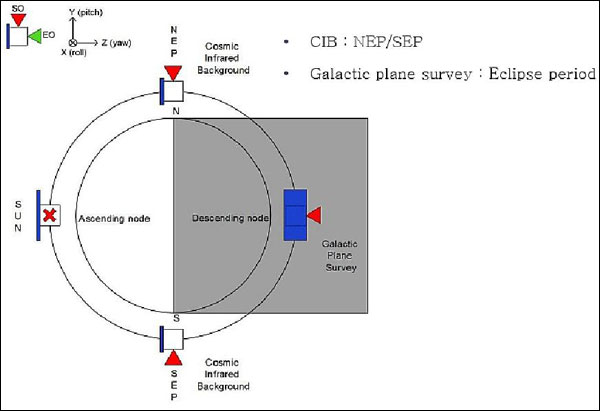
• After initial operation for the verification period of STSAT-3, MIRIS will perform its primary science missions of (1) mapping of the Galactic plane with Paschen-α line (1:88 µm) for the study of warm interstellar medium and (2) measuring large angular fluctuations of cosmic near infrared background radiation with I (1:05 µm) and H (1:6 µm) bands to identify the origin of these fluctuations (Ref. 19).
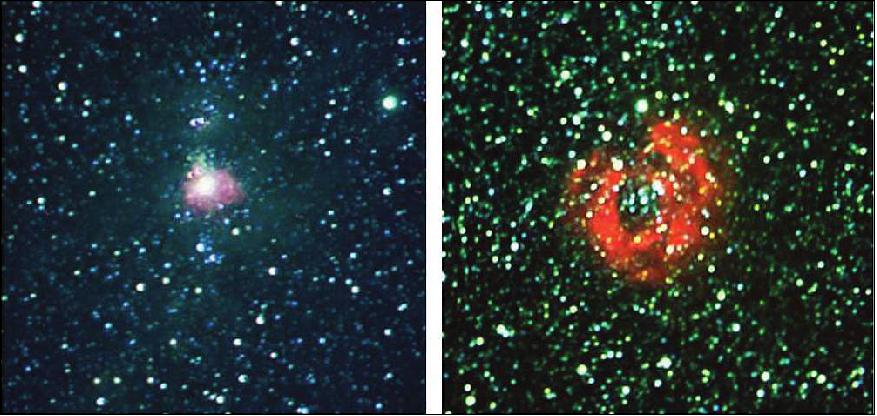
• Dec. 23, 2013: The first light observations were made for M42 (Orion Nebula) and the Rosette Nebula, as shown in Figure 15. These images were composed of three filter images of I, H and Paschen-α, mainly for functional test purposes without any proper calibration process.
• Several days after launch, STSAT-3 settled into sun synchronous orbit with an altitude of ~600 km, and communications were regularly made between the ground station and MIRIS with other secondary payloads. The project team made a series of on-orbit tests of MIRIS during the verification period and found that all functions, including passive cooling, were working as expected.
- The MIRIS telescope was cooled down to around 200 K by the passive cooling process, and the temperature of the PICNIC IR detector was also successfully cooled down with the cooler to around 90 K, which is the proper observational temperature range. It took about nine hours to reach 90 K from 200 K after the cooler operation started in the space environment.
• Nov. 21, 2013: Controllers confirmed that initial contact with the satellite was made 89 minutes after lift-off at the Svalbard ground station, Norway. The telemetry confirmed that STSat-3 had been successfully deployed into its target orbit. 12) About 6 hours after lift-off, the Daejeon ground station received its first signals from the spacecraft. 13)
Sensor Complement
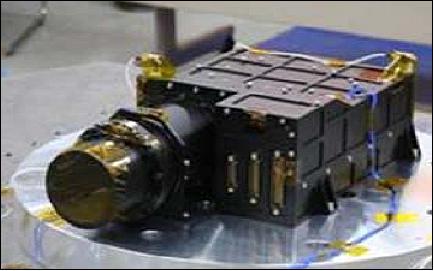
The sensor complement consists of two instruments, MIRIS is dedicated to space science, while COMIS is a technology demonstration instrument for Earth observations.
MIRIS (Multipurpose InfraRed Imaging System)
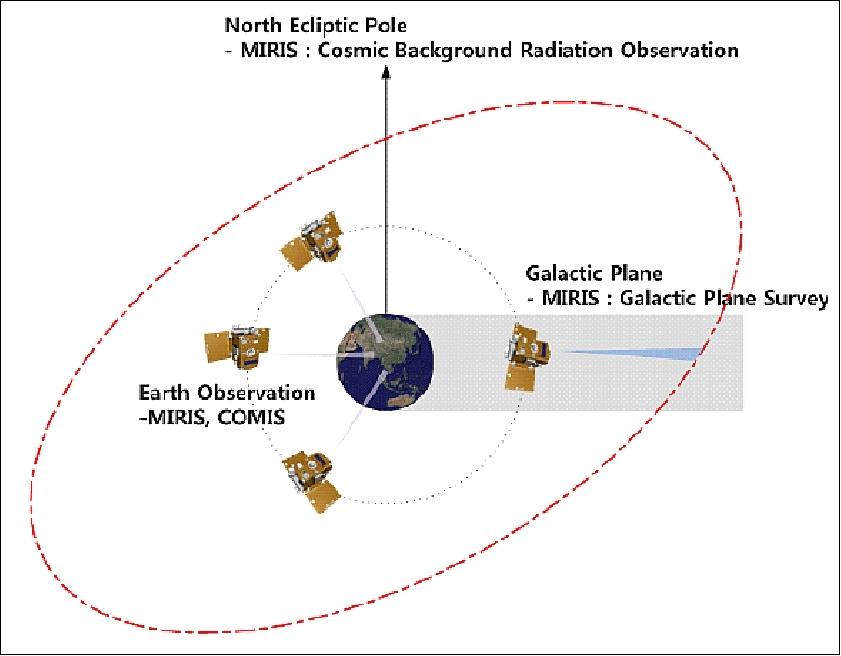
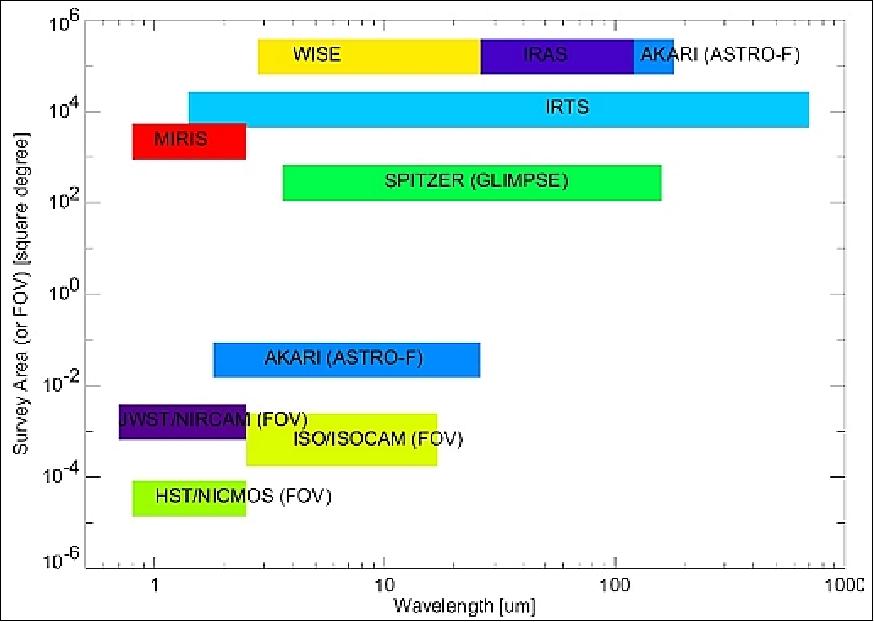
The MIRIS instrument is the main payload of the STSAT-3 spacecraft. The objective of the MIRIS instrument is to survey the Galactic plane in the emission line of Paschen-α (Pa α at 1.88 µm) and to detect the cosmic infrared background (CIB) radiation, particularly around the north ecliptic pole region. MIRIS has been designed and developed by KASI (Korea Astronomy and Space Science Institute), Daejeon, Korea. 14) 15) 16) 17) 18) 19)
MIRIS features two IR cameras, one is used for space applications (Galaxy plane survey) while the second one is used for Earth observations (Figure 10):
• The first camera is labeled MSOC (MIRIS Space Observation Camera). It will be used to observe near IR emission lines of the diffuse warm ionized medium in the Galaxy plane with a FOV (Field of View) of 360º x 6º. A further goal is to observe the CIB radiation from first generation stars in the region of the north ecliptic pole with a FOV of 10º x 10º.
• The objective of the 2nd IR camera, referred to as MEOC (MIRIS Earth Observation Camera) is to demonstrate the IR technology in Earth observation, in particular to observe the Korean peninsula in the IR spectrum. 20)
The MIRIS instrument has a mass of < 30 kg and a power consumption of < 30 W. The onboard MMU (Mass Memory Unit) has a capacity of 10 Gbit, corresponding to the data volume of one day.
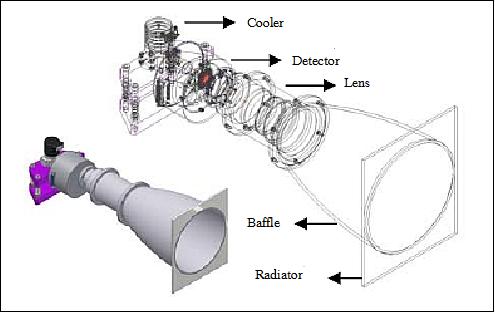
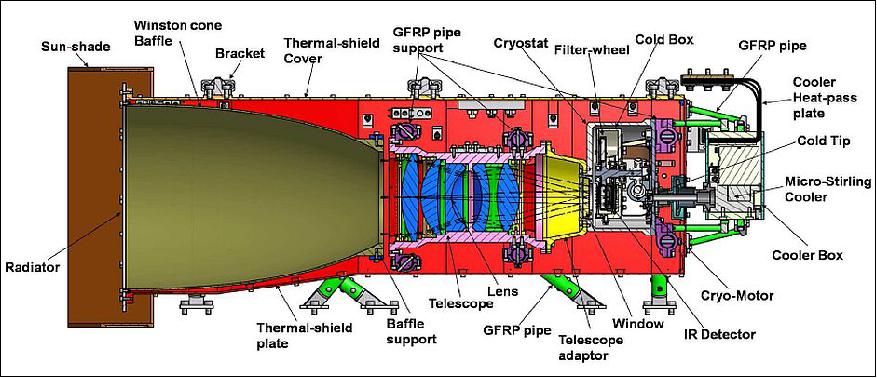
MSOC (MIRIS Space Observation Camera): MSOC is composed of the cooler for detector cooling, detector (IR sensor), lens, baffle and radiator for passive cooling.
Spectral range | 0.9 ~ 2 µm |
Aperture diameter | 80 mm |
Effective focal length | 160 mm |
Focal ratio | f/2 |
Detector array size, pixel size, detector area | 256 x 256, 40 µm x 40 µm, 10.2 mm x 10.2 mm |
Pixel FOV | 51.6 arcsec x 1.6 arcsec |
Detector FOV | 3.67º x 3.67º |
Detector manufacturer | Teledyne PICNIC |
Filter | Filter wheel (6 filters) |
Detector temperature | 180-200 K (use of active and passive cooling) |
Performance | MTF (Modulation Transfer Function) > 60% |
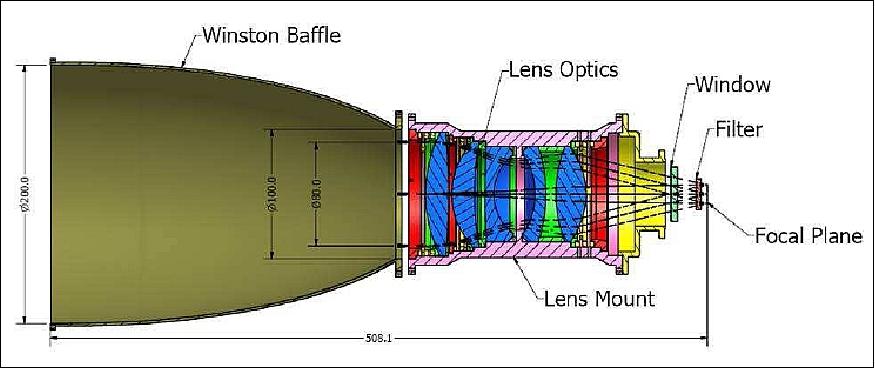
The MIRIS SOC (MSOC) optics consist of five lenses, among which the surfaces of the first four lenses and the front of the fifth lens are spherical, and the rear surface of the fifth is aspherical. In order to reduce chromatic aberration, three materials from Ohara Co. of Japan are being adopted: S-FPL53, fused silica, and S-TIH6 (Figure 20).
In the opto-mechanical design, the stress on the lens surfaces is being reduced by by adopting three flexures (yellow portion in Figure 20); a huge Winston baffle is attached in front of the telescope to avoid strong radiation from earth surface in a wide angle over 30º.
MEOC (MIRIS Earth Observation Camera):
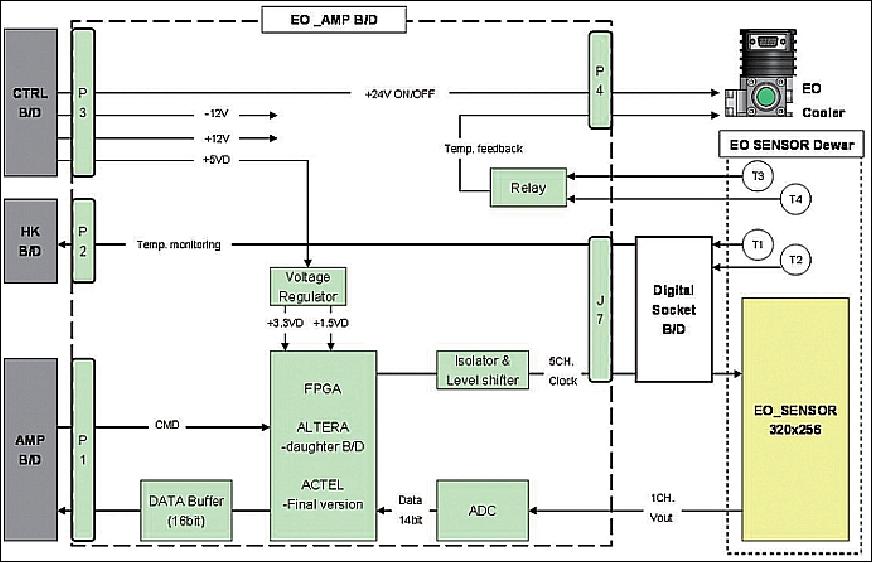
One of the main purposes of the MEOC is to test Korean IR technology in space. For the best performance of the IR sensor, the project is using the IR sensor package from i3system Inc., including the Dewar and the cooler in the package. The EO_AMP board, which is interfacing the IR sensor, provides the digital clock and power; it monitors the temperature signals from the IR sensor for cooler control, and receives the analog output of the IR sensor. The analog output signal is converted to digital data, which are transferred to the main electronics system of the MIRIS. Use of a 14 bit ADC (Analog Digital Converter) with a dynamic range of 2.5 V. The readout speed is 5 frames/s at maximum, but it is set to 1 frame/s for optimal data size. The exposure time of the array can be set from 1 ms to 655.36 ms, in increments of 0.01 ms (Figure 23; Ref. 20).
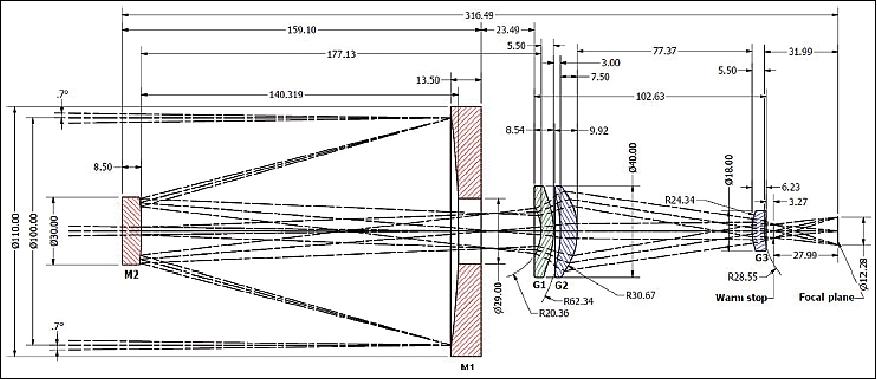
Optical design: The requirements call for a GSD (Ground Spatial Resolution) of < 50 m, the swath with shall be > 13.4 km at the nominal altitude of 700 km. The achieve these goals, the f-number of the MEOC optics is set to 5, while the aperture of the main mirror is 100 mm.
Spectral range (SWIR) | 3 ~ 5 µm |
Effective aperture diameter | 100 mm |
Focal ratio | f/5 |
Detector technology | HgCdTe |
Detector array size, pixel size, detector area | 320 x 326, 30 µm x 30 µm, 9.6 mm x 9.6 mm |
Pixel FOV | 12.4 arcsec x 12.4 arcsec |
Detector FOV | 1.10º x 1.10º |
Detector manufacturer | i3 System Company, Korea |
Filter | Bandpass filter (3~5 µm) |
Ground pixel size | 42 m |
Swath width | 13.4 km |
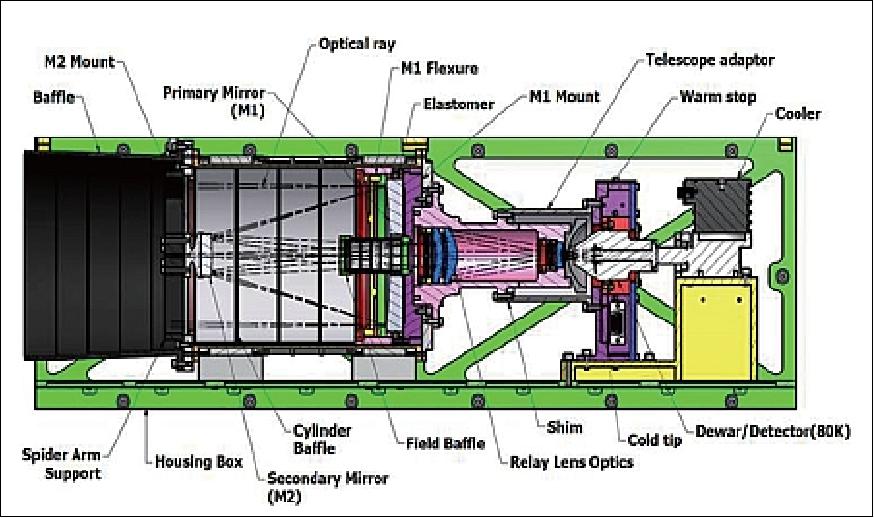
The MEOC optics is composed of the Cassegrain telescope and relay lens system. The Zerodur aspherical mirrors are located in the telescope, while germanium and silicon lenses are attached behind the telescope. To eliminate thermal noise in the dewar system, a warm stop is inserted behind the lens system. The bandpass filter of 3.8-4.8 µm is covered inside the dewar. The detector temperature is kept to 80 K. The layout of the optics is shown in Figure 24.
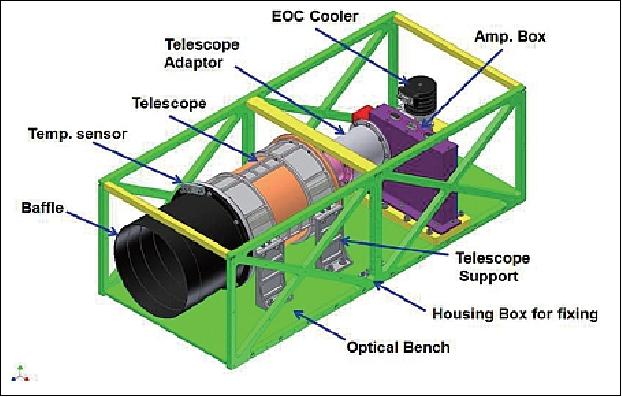
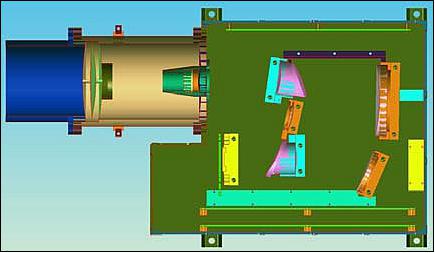
Mechanical design: Figure 25 shows a schematic view of the MEOC while Figure 26 provides a view of the internal structure of the MEOC. All the opto-mechanical parts are operated at room temperature, except for the inside of dewar, which is operated at 80 K by a mechanical cooler.
The aspherical feature of the primary mirror is most important for the performance of MEOC system. Accordingly, the project measured the PSF (Point Spread Function) of the system after assembling the primary and the secondary mirrors. The analyzed rms PSF size is 29 µm at 632.8 nm.
COMIS (COMpact Imaging Spectrometer)
COMIS is a secondary payload, an imaging spectrometer which was inspired by the success of CHRIS, developed for the PROBA-1 mission of ESA. COMIS takes hyperspectral images of 27 m GSD (Ground Sampling Distance) over a 28 km swath width. COMIS is designed to achieve nearly equivalent imaging capabilities as CHRIS in a smaller (an entrance pupil diameter of 65 mm and an instrument mass of 4.3 kg) and mechanically superior (in terms of alignment and robustness) package. The instrument has been designed and developed at KNU (Kongju National University), Kongju, Korea. 21) 22) 23) 24) 25) 26) 27)
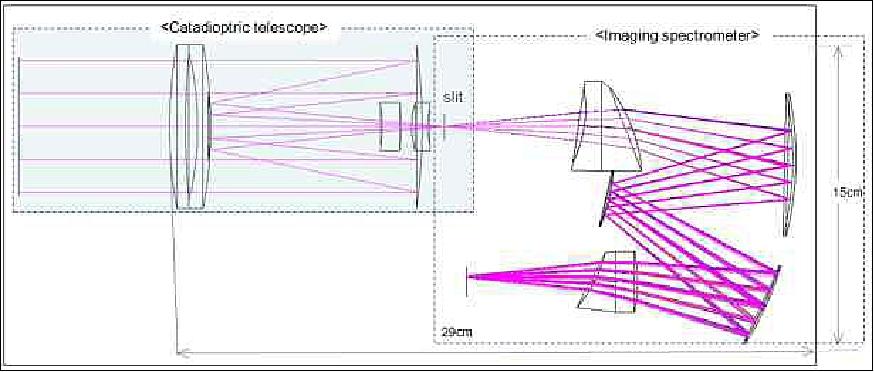
The optics subsystem of COMIS is comprised of a Maksutov catadioptric telescope and an imaging spectrometer, as shown in Figure 28. Between the telescope and the spectrometer lies the spectrometer entrance slit, which is treated as part of the telescope assembly. The telescope forms an image of the distant Earth scene onto the entrance slit, so that the telescope and slit define a slit-shaped instantaneous field-of-view (IFOV). The spectrometer re-images the collected light, disperses it in the direction perpendicular to the slit image, and focuses it on to the area-array detector. Figure 27 shows optical layout.
Spectral range (VNIR) | 0.4 - 1.05 µm |
Spectral resolution | 2~15 nm |
Maximum number of bands | 64 (typical: 18, 32, or 62) |
Spatial resolution | 30 m / 60 m (selectable by command) |
Swath width | 15 km / 30 km |
Instrument mass, power consumption | 4.3 kg, < 5 W |
The electronics unit consists of the focal plane electronics, video electronics, control electronics, and a low-voltage power supply. The average power consumption for the observation mode and in standby mode is 14 W and 8 W, respectively.
Sensor & Video Electronics: Figure 30 shows the functional block diagram of focal plane electronics and video electronics. The re-imaged light emerges from the spectrometer with the slit dispersed spectrally, at right angles to the slit direction.

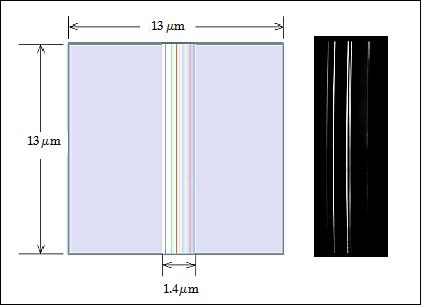
The CCD array in the spectrometer focal plane is aligned so that it acquires the spatial data in one dimension and the spectral data in the other. A single pixel has dimensions of 13 µm x 13 µm. The CCD with a broadband coating offers high quantum efficiency over the visible and near-IR ranges, providing the ability to make radiometric measurements in the spectral range of 400-1050 nm within 1.4 µm such as illustrated in Figure 31. Hence, COMIS may acquire images of Earth’s surface in up to 120 narrow spectral channels located in the visible and near infra-red wavelengths.
The focal plane electronics consist of bias circuits, clock driver and pre-amp for the video signals. Video electronics have characteristics defined the the following list:
- 16 bit 15 MSPS A/D converter
- 2-channel with odd/even outputs
- CDS (Correlated Double Sampling)
- 1~6 x programmable gain
- 300 mV programmable offset
- Input clamp circuitry
- 1~120 channels(spectrum) selectable.
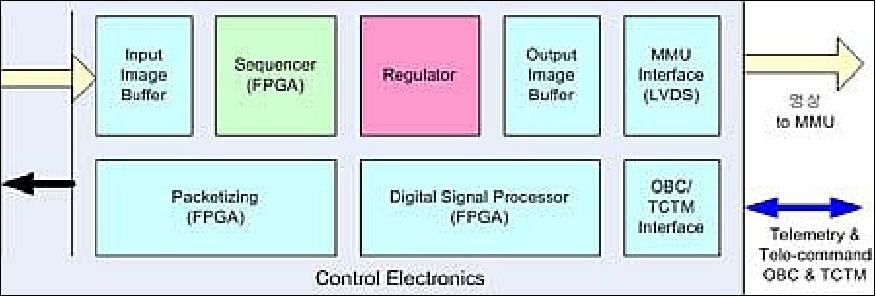
Control electronics: The control electronics include the embedded digital signal processor, input image buffers, output image buffers, a sequencer for CCD clocking, a packetizing function for the spacecraft communication and image data transfer to the mass memory units. All functions are implemented in one FPGA except the physical driver for reasons of mass, volume and power consumption reductions. Figure 32 shows the functional block diagram of the control electronics.
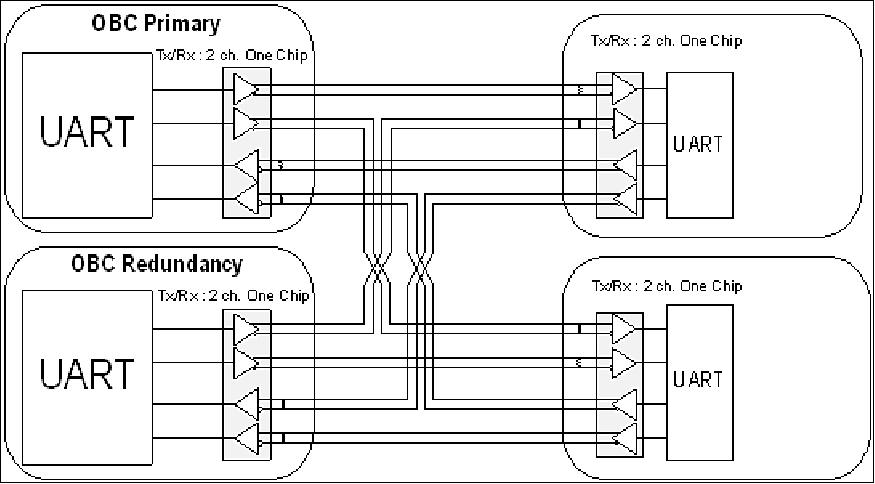
The main clock of the embedded controller on the FPGA and sequencer clock are both synchronized at 80 MHz. The sequencer clock has the capability to be changed by ground command with a digital PLL on the FPGA. All the CCD clocking parameters are also programmable which permits to change the sampling frequency by ground command. A particular strength of the CCD package is its flexibility in terms of line transfer and read-out capabilities. This allows a wide variety of different imaging configurations. Figure 7 shows electrical interface between on-board computer of spacecraft and COMIS. The serial communication line is implemented with full redundancy through the RS-422 physical lines.
For the image data transfer, a 100 Mbit/s LVDS (Low Voltage Differential Signal) interface is used.
HPS (Hall-thruster Propulsion Subsystem) - a technology demonstration
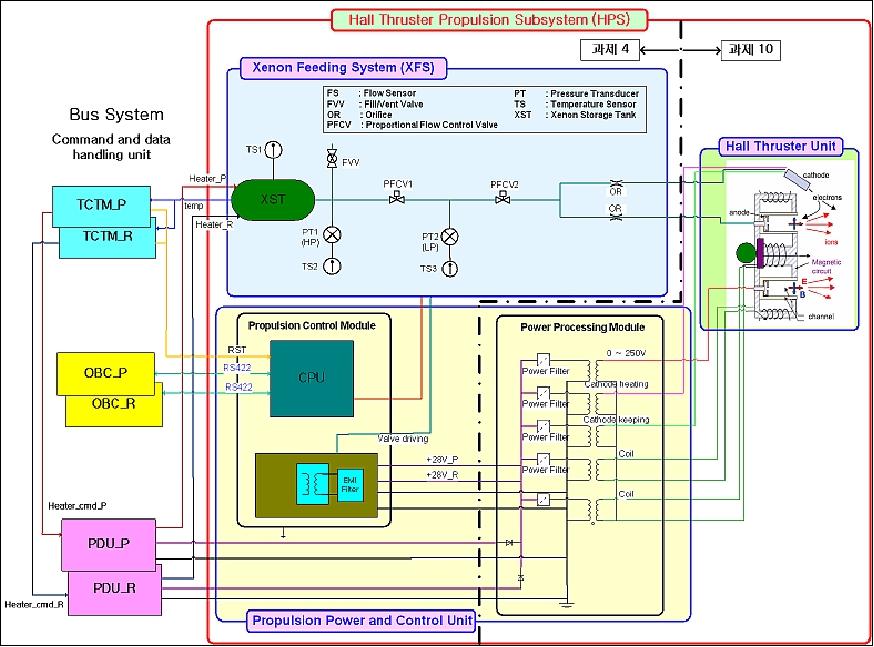
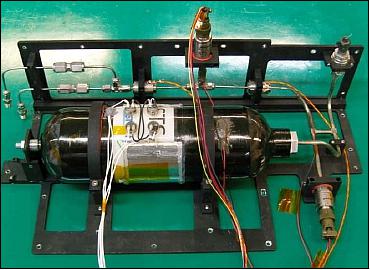
HPS represents a new technology development of an electric propulsion subsystem developed at KAIST. The objective is to test and space qualify this new system. The HPS consists of four subsystems: PCM (Propulsion Control Module), HTU (Hall Thruster Unit), PPM (Power Processing Module) and the XFS (Xenon Feeding System). 28) 29) 30)
The HPS configuration (Figure 34) shows the relation of the each module and interface for the bus system which has OBC (On-Board Computer), TCTM (Telecommand & Telemetry) module, and the PDU (Power Distribution Unit). XFS stores xenon gas in a high pressure vessel and provides the xenon gas for the thruster head. PPM supplies the needed power to the thruster head to fire the xenon gas and to make the plasma. HT provides an electric and magnetic field and expels the positive ion of the xenon particles. The PCM measures temperatures, pressures, voltages, and currents from all modules in HPS.
The PPM converts electrical power (300 W) provided by solar panels of STSat-3 to the power required for accelerating charged particles inside the channel of the thruster head. The PPM provides 28 V of unregulated power to the HTU. Various thrust levels can be supported by the PPM.
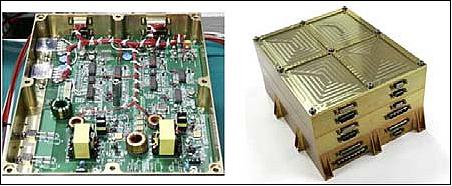
The PCM, designed and developed at KAIST/SaTReC and at SI (Satrec Initiative Co. Ltd.), has a two-stage architecture: a pressure control system and a flow control system. The PCM controls the flow rate of xenon gas using the telemetry from the anode current of the HTU. All commands received from the OBC are sent to the PCM through the RS422 UART at a rate of 38.4 kbit/s. All operation scenarios are transmitted by the OBC.
The HTU finally generates the necessary thrust by utilizing the supplied electrical power and propellant. The thruster has a size of 63.4 mm (diameter) x 70 mm (height), and a mass of 1.3 kg.
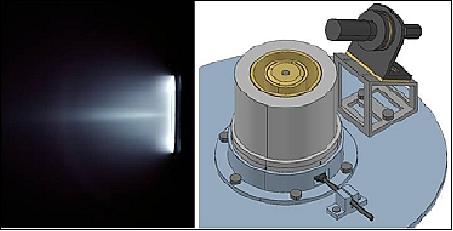

The HPS provides a thrust of > 10 mN using a xenon propellant, a specific impulse of ~ 1300 s, and an anode efficiency of ~ 35.5%at 8 sccm (standard cubic centimeters per minute) Xe flow rate and 230 W total thruster input power. The instrument has a power consumption of ~ 300 W and an instrument mass of 14.6 kg.
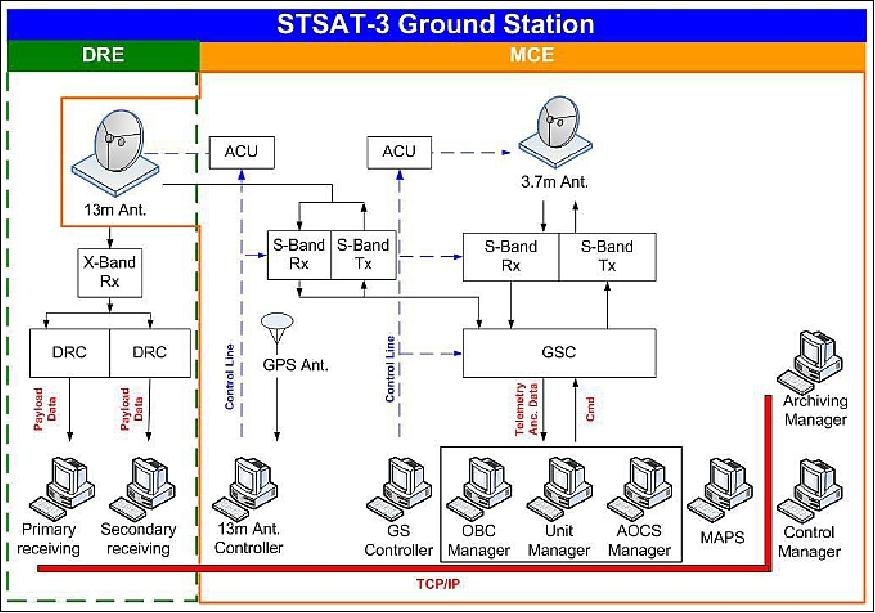
Ground Segment
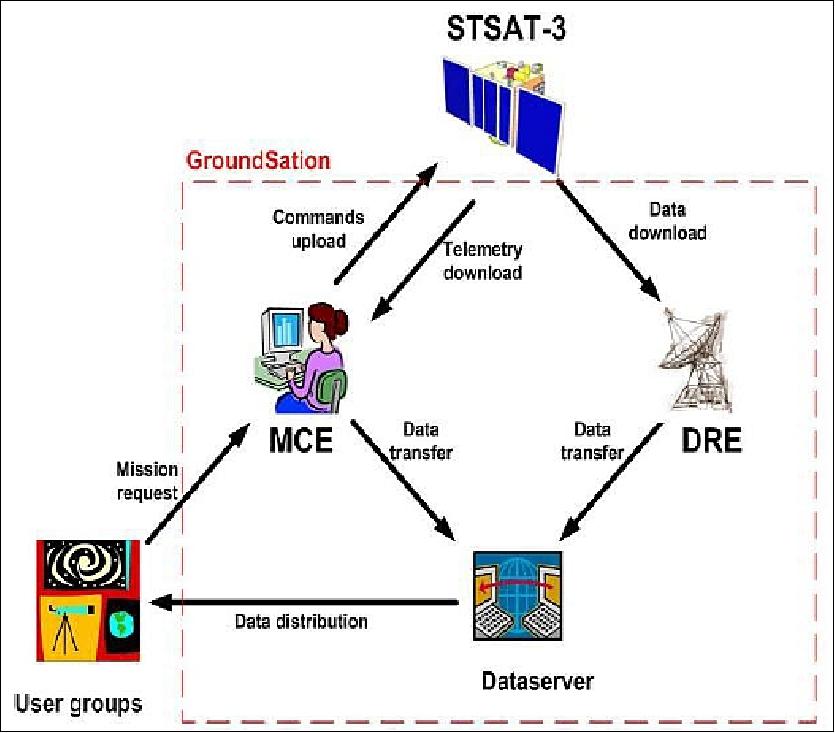
The ground segment of STSat-3 provides the capability to monitor and control the spacecraft, conduct mission planning, and receive, process, and distribute the payload data to satisfy the overall requirements of the STSat-3 mission. 31) 32)
The KAIST ground station consists of the MCE (Mission Control Element) and the DRE (Data Receiving Element) which are existing elements of the STSat program (as well as of the KITSat program). With this heritage, the existing ground station will be re-used and upgraded to reduce the cost, risk, and development time.
The ground station has two antennas: 1) 13m X/S-band antenna, 2) 3.7m S-band antenna. The 13 m antenna can upload/download the S-band signal and can download the X-band signal The 3.7m parabolic reflector antenna system can upload and download the S-band signal as a full duplex back-up antenna system. The ground station has the capability of performing antenna pointing and STSat-3 satellite tracking for both X-band and S-band.
References
1) Sung-Sae Lee, Jong-Ho Park, Seung-Wu Rhee, Goo-Hwan Shin, Hong-Sun Park, “Introduction to EPS (Electrical Power Subsystem) of STSAT-3 (Science and Technology Satellite-3),” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.C3.1.9
2) Jong-Oh Park, Hong-Young Park, Dae-Hee Lee, Joon-Ho Lee, Seung-Woo Rhee, “STSat-3 (Science & Technology Satellite-3) Satellite Missions,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.2.6
3) Dae Soo Oh, In Ho Seo, Jong Ju Lee, Sung Ok Park, “The design and implementation of Reconfigurable Command and Data handling Subsystem for Science Technology Satellite-3,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.7.4
4) Kyung-Hwa Park, Chol-Ho Kim, Hee-Keun Cho, Joung-Ki Seo, “Design Considerations of a Lithium Ion Battery Management System (BMS) for the STSAT-3 Satellite,” Journal of Power Electronics, Vol. 10, No. 2, March 2010, URL: http://review.jpe.or.kr/On_line/admin/paper/files/15-JPE0987.pdf
5) Goo-Hwan Shin, Hong-Young Park, Jeong-Ki Seo, Tae-Jin Chung, Noh-Hyoon Myung, “Introduction to Micro-Satellite STSAT-3 Development,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.6A.2
6) “Dnepr Cluster Mission 2013,” ISC Kosmotras, Nov. 21, 2013, URL: https://web.archive.org/web/20131125042753/http://www.kosmotras.ru/en/news/149/
7) Patrick Blau, “Dnepr Rocket successfully launches Cluster of 32 Satellites,” Spaceflight 101, Nov. 21, 2013, URL: http://www.spaceflight101.com/denpr-2013-cluster-launch-updates.html
8) Robert Christy, “Dnepr Launch 2013 November 21,” Zarya, Nov. 21, 2013, URL: http://www.zarya.info/blog/?p=1745
9) “2013 in spaceflight,” Wikipedia, Nov. 21, 2013, URL: http://en.wikipedia.org/wiki/2013_in_spaceflight#November
10) “PUCPSat-1 Satellite Project,” URL: http://inras.pucp.edu.pe/pucpsat1/index.html
11) Jin-Goog Kim, Hyun-Wook Jo, Chi-Wook Oh, Kyung-In Kang, Jong-Tae Lim, “Development of Low Pass Filter for STSAT-3 Communication Subsystem,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B2.5.3
12) Oh Kyu-wook “Korea launches new science satellite,” The Korea Herald, Nov. 22, 2013, URL: http://www.koreaherald.com/view.php?ud=20131121000781
13) “Korea Succeeds in Launching, Deploying Science Satellite with Infrared Radar,” Business Korea, Nov. 24, 2013, URL: http://www.businesskorea.co.kr/news/articleView.html?idxno=2256
14) Wonyong Han, Woong-Seob Jeong, Ho Jin, Jang-Hyun Park, Uk-Won Nam, Dae-Hee Lee, Youngsik Park, Chang Hee Ree, Sungho Lee, In-Soo Yuk, Bongkon Moon, Sung-Joon Park, Sang-Mok Cha, Seoung-Hyun Cho, Duk-Hang Lee, Hyung Mok Lee, Toshio Matsumoto, Sun Choel Yang, Seung-Wu Rhee, Jong-Oh Park, “Korea Space Science Payload, MIRIS Developments,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.A3.4.9
15) H. Jin, B. Moon, D. H. Lee, Y. Park, C. H. Ree, S. M. Cha, W. Jeong, S. J. Park, U. W. Nam, K. I. Seon, I. Yuk, S. Lee, J. H. Park, W. Han, T. Matsumoto, S. W. Rhee, J. Park, “Calibration and validation of MIRIS space observation camera,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.6A.6
16) S. J. Park, B. Moon, C. H. Ree, H. Jin, J. H. Park, U. W. Nam, D. H. Lee, Y. Park, W. S. Jeong, S. M. Cha, D. H. Lee, W. Han, T. Matsumoto, “Design and development of MIRIS SOC infrared optics for STSAT-3 mission,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.6A.7
17) Dae-Hee Lee, Sang-Mok Cha, Wonyong Han, Woong-Seob Jeong, Duk-Hang Lee, Toshio Matsumoto, Bongkon Moon, Uk-Won Nam, Sung-Joon Park, Youngsik Park, Chang Hee Ree, Seung-Wu Rhee, “Near infrared camera for astronomy in the small satellite STSAT-3,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.2.6
18) Wonyong Han, “MIRIS, A Compact Infrared Space Telescope,” 52nd session of the Scientific and Technical Subcommittee, UNOOSA (United Nations Office for Outer Affairs), Vienna, Austria, Feb. 2-13, 2015, URL: http://www.unoosa.org/pdf/pres/stsc2015/tech-26E.pdf
19) Wonyong Han, Dae-Hee Lee, Woong-Seob Jeong, Youngsik Park, Bongkon Moon, Sung-Joon Park, Jeonghyun Pyo, Il-Joong Kim, Won-Kee Park, Dukhang Lee, Kwang-Il Seon, Uk-Won Nam, Sang-Mok Cha, Kwijong Park, Jang-Hyun Park, In-Soo Yuk, Chang Hee Ree, Ho Jin, Sun Choel Yang, Hong-Young Park, Goo-Hwan Shin, Joung-Ki Seo, Seung-Wu Rhee, Jong-Oh Park, Hyung Mok Lee, Hiroshi Murakami, Toshio Matsumoto, “MIRIS: A Compact Wide-field Infrared Space Telescope,” Publications of the Astronomical Society of the Pacific (PASP), Vol. 126, No 943, pp: 853–862, September 2014, URL: http://www.researchgate.net/profile/Wonyong_Han/publication/266832100_MIRIS_A_Compact_Wide-field_Infrared_Space_Telescope/links/543ce3560cf20af5cfbf8396.pdf
20) Dae-Hee Lee, Wonyong Han, Youngsik Park, Sung-Jun Park, Bongkon Moon, Chang Hee Ree, Jeonghyun Pyo, Woong-Seob Jeong, Uk-Won Nam, Duk-Hang Lee, Kwijong Park, Sooho Bae, Seung-Wu Rhee, Jong-Oh Park, Geon-Hee Kim, Sun-Choel Yang, Young-Ju Kim, “Development of the Earth Observation Camera of MIRIS,” JASS (Journal of Astronomy and Space Science), Vol. 28, No 3, 2011, pp. 225-232
21) Jun Ho Lee, Chi Weon Lee, Jong-hoon Lee, Yung-mi Lee, Eun Sil Kim, Jin Ah Lee, Jung-Hyun Kim, Sang-Jun Lee, Tae Sung Jang, Kyung In Kang, “Compact Imaging Spectrometer (COMIS) for a microsatellite STSAT3: Design and Performance,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B1.3.11
22) Jun Ho Lee, “Current Status of the development of a Compact Imaging Spectrometer (COMIS) for a microsatellite STSAT3,” The Optical Society of Korea Summer Meeting 2008, Pyoung Chang, Korea, July 10-11, 2008
23) J. H. Lee, C. W. Lee, K. I. Kang, T. S. Jang, H. S. Yang, W. Han, “A compact imaging spectrometer (COMIS) for the microsatellite STSAT3,” Proceedings of SPIE, Europe Remote Sensing Conference, 'Sensors, Systems, and Next-Generation Satellites XI,' Editors: Roland Meynart, Steven P. Neeck, Haruhisa Shimoda, Shahid Habib , Vol. 6744, Florence, Italy, Sept. 17-20,, 2007
24) Jun Ho Lee, Chi Weon Lee, Yong Min Kim, Jae Wook Kim, “Optomechanical Design of a Compact Imaging Spectrometer for a Microsatellite STSAT3,” Journal of the Optical Society of Korea, Vol. 13, No. 2, June 2009, pp. 193-200
25) Kyungin Kang, Chul-Woo Lim, Tae-Seong Jang, Jun-Ho Lee, “Development of Hyperspectral Imaging Electronics for STSAT-3 Satellite,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.78
26) Jun Ho Lee, Chi Weon Lee, Yong Min Kim, Jae Wook Kim, “Optomechanical Design of a Compact Imaging Spectrometer for a Microsatellite STSAT3,” Journal of the Optical Society of Korea, Vol. 13, No. 2, June 2009, pp. 193-200, URL: http://gogongju.subnara.info/pdf/02.pdf
27) Jun Ho Lee, Kyung In Kang, Jong Ho Park, “A very compact imaging spectrometer for the microsatellite STSAT-3,” International Journal of Remote Sensing,Vol. 32, No. 14, 20 July 2011, pp. 3935–3946, URL: http://opticslab.kongju.ac.kr/pdf/16.pdf
28) Sung-Ho Rhee, Hee-Keun Cho , Kwang-Sun Ryu, Won-Ho Cha, Cheol-Woo Lim, Kyeon-In Kang, Noh-Hoon Myung, Jong-Sub Lee, Mi-Hui Seo, Won-Ho Choi, Eun-Young Jeon, “Development of the Propulsion Controller of the Hall-thruster Propulsion System for Science Technology Satellite-3 (STSat-3),” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.5.-D2.7.10
29) Wonho Choe, Jongsub Lee, Mihui Seo, Jongho Seon, Eunyong Jeon, Hee Keun Cho, Sung-Ho Rhee, W. H. Cha, “Development of a 10 mN class Hall thruster for STSAT-3,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.C4.4.1
30) Wonho Choe, Mihui Seo, Jongsub Lee, Holak Kim, Jongho Seon, Hae June Lee, Goo-Hwan Shin, Hong-Young Park, Jung-Ki Seo, Tae-Seong Jang, Won-Ho Cha, Seong-Ho Lee, Hee-Keun Cho, Eunyong Jeon, Yunhwang Jeon, “R&D Activities on Low Power Electric Propulsion System for Small Satellites in KAIST,” Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-b-11
31) KyungHee Kim, Hyochoong Bang, Jang-Soo Chae, Hong-Young Park, Sang-Hyun Lee, “Ground Station Design for STSAT-3,” International Journal of Aeronautical and Space Science, Vol. 12, No 3, 2011, pp. 283–287, DOI:10.5139/IJASS.2011.12.3.283, URL: http://past.ijass.org/On_line/admin/files/(283-287)11-019.pdf
32) Kyunghee Kim, Chol Lee, Sung-Og Park, Mi Young Park, Jong-Ju Lee, Jung-Su Lee, Gyu-Jae Seo, Chi-Wook Oh, Jang-Soo Chae, “Ground station development for the STSat-3,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.3.2
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top