TacSat-1 (Tactical Satellite-1)
EO
Cancelled
Multi-purpose imagery (ocean)
Imaging multi-spectral radiometers (vis/IR)
Quick facts
Overview
| Mission type | EO |
| Agency | DoD (USA) |
| Mission status | Cancelled |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Gravity, Magnetic and Geodynamic measurements |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Communications, Data collection |
| CEOS EO Handbook | See TacSat-1 (Tactical Satellite-1) summary |
TacSat-1 (Tactical Satellite-1)
TacSat-1 is a low-cost technology demonstration minisatellite mission, a joint project sponsored by OFT (Office of Force Transformation) of DoD and NRL (Naval Research Laboratory), Washington, DC, with NRL providing design, integration, and project management. The TacSat program initiative started in May 2003 with the goal to perform Operationally Responsive Space (ORS) experimentation.. The technology incubator effort includes representatives from the Army, Navy, and the Air Force.
The overall objectives of TacSat-1 are to demonstrate the following capabilities: 1) 2) 3) 4)
• Machine-to-machine collaboration between air and space units for geo-location
• Tactical control of payload and dissemination of data through the SIPRNet (Secure Internet Protocol Router Network), a classified network of DoD. The SIPRNet was broadly deployed in parallel with the Internet, and it continues to expand.
• Specific sensor discrimination capability, to identify and capture information from items on the battlefield emitting measurable electronic signals. In particular, the S/C is to locate ships with an instrument that listens for radio signals and then takes pictures with a camera.
• SIPRNet tasking and data dissemination of an Infrared Camera utilizing a new thermal imager (non-cryogenically cooled microbolometer FPA), thereby significantly reducing complexity (size, weight and power)
• SIPRNet tasking and data dissemination of a Visible Camera primarily to provide modest resolution but intuitive pictures for collective collaboration by an expanded user base.
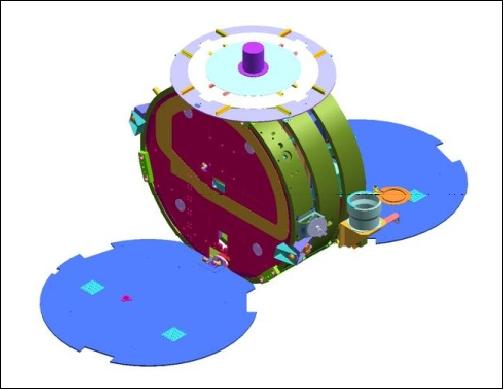
Spacecraft
The minisatellite utilizes the MicroStar bus of OSC (Orbital Space Corporation), including avionics and solar arrays. Most of the basic hardware components were available from previous programs. The system takes advantage of a highly automated bus, modular payloads, common interfaces, tasking and data dissemination using SIPRNet with TCP/IP addressability, and low-cost, rapid-responsive launches. The S/C is 3-axis stabilized with primary measurement and control based on magnetic principles. The TacSat-1 bus size is: 1.05 m diameter, 0.5 m in height (or width). The S/C mass is 132 kg. The design life is 1 year.
Launch
A launch of TacSat-1 was scheduled for the fall of 2007 from VAFB, CA, on a Falcon-1 launch vehicle of SpaceX (Space Exploration and Technologies Corporation) of El Segundo, CA. But the mission was cancelled. 5)
Note: The TacSat-1 mission was cancelled by DoD in Aug. 2007 - a casualty of the long launch delays that were encountered. In the meantime, TacSat-2, with a launch on Dec. 16, 2006, is already demonstrating many of the capabilities TacSat-1 was built to test. Hence, the military officials see currently no incentive to launch the mission - unless a payload upgrade of TacSat-1 may turn out to be of significant value.
TacSat-1 originally was supposed to launch in 2004, but has been in storage since then waiting for SpaceX to finish the Falcon-1 launch vehicle and to demonstrate it was ready to carry the payload to orbit. - Falcon-1 has launched twice, failing to reach orbit on both occasions. The first launch, conducted in March 2006, ended shortly after liftoff due to an engine fire that was traced back to a corroded nut. Falcon-1's second launch, conducted in March 2007, fared better. The rocket reached an altitude of 300 km before a roll-control malfunction prevented it from completing its flight plan. A SpaceX-led launch review conducted with the Pentagon's assistance concluded that Falcon-1's problems were relatively minor and that the vehicle was ready to launch a satellite on its next flight.
Orbit
Near-circular orbit, altitude = 500 km, inclination =64º.
RF Communications
TacSat-1 uses the standard SGLS (Space-to-Ground Link Subsystem) band for spacecraft operations as well as a tactical RF link for EP-3 and, later, Rivet Joint (RJ) aircraft access for cross-platform mission use.
Ground Segment
Spacecraft operations (monitoring and control) functions are provided by the Blossom Point Ground Station of NRL, located near LaPlata, MD, USA. In addition, the station is providing SIPRNET-based payload tasking and data dissemination using a tailored version of VMOC. TacSat-1 utilizes VMOC (Virtual Mission Operations Center), a product of General Dynamics, for SIPRNet payload tasking and data dissemination. Additional antenna coverage support is planned from the Air Force Satellite Control Network (AFSCN).
VMOC is an IP-based command and control system capable of supporting secure distributed mission operations of any IP-based platform or sensor (the system is designed to be interactive for the user). The system has a SIPRNet (Secure Internet Protocol Router Network) address, so battlefield commanders can potentially access the satellite's sensor data through the classified network of DoD. 6)
Note: VMOC is a joint US governmental NASA/DoD initiative using Nautilus Horizon software from General Dynamics. The VMOC project is funded by the RAI-NC (Rapid Acquisition Incentives-Net Centricity) program of DoD. The VMOC communications concept was successfully demonstrated in the summers of 2004 and 2005, respectively, using the UK-DMC (launch Sept. 27, 2003) spacecraft of SSTL and an onboard Cisco router. In these demonstrations, operators at VAFB specified areas of the Earth to be imaged, they then received satellite images and telemetry, and commanded the router. - Users in the field relied on mobile routing to communicate across the Internet via a home agent at NASA/GRC in Cleveland, OH, to the Cisco router onboard the satellite via the supporting SSTL ground station. The VMOC and router testing was a collaborative experiment centered on the US Air Force, the Army and NASA/GRC (Glenn Research Center), involving other organizations as well.
Sensor/Payload Complement
RF Communications Package
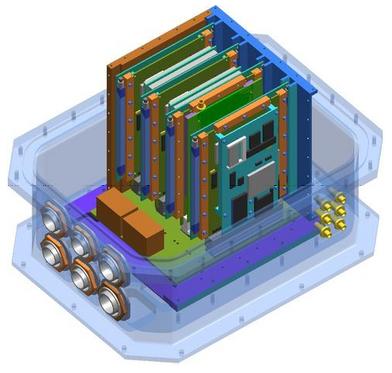
It performs cross-platform geolocation experiments, developed at NRL. The objective is to detect, identify and track pulsed radio frequency signals (reconnaissance research). It includes the Copperfield-2 system which serves as an infrastructure to the S/C payload. \[Note: Copperfield-2, an existing sensor system developed for flight on the Global Hawk unmanned aerial vehicle (UAV), became the cornerstone of the TacSat-1 payload infrastructure\]. Copperfield-2 is providing two key functions for the mission: 7)
• First, it is itself a sensor system that receives signals of interest and provides for autonomous (machine-to-machine) collaboration between aircraft and spacecraft for geolocation determination.
• Secondly, it serves as a general-purpose computer system providing the services for storage and data handling \[a module designed specifically for TacSat, called the high-speed interface (HSI), provides conversion from the TCP/IP payload communication protocol, to the proprietary OX.25-based communications that the Orbcomm bus provides\]. Several processors are part of the Copperfield-2 payload, each communicating via an Ethernet network, using TCP/IP protocols.
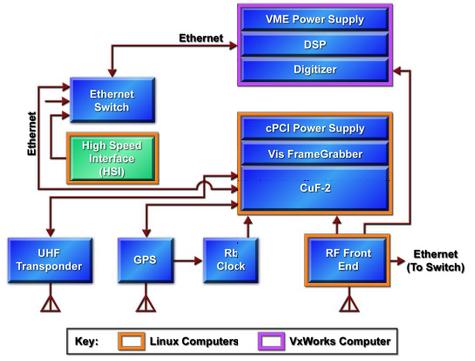
The selection of standard TCP/IP communications and of Linux-based operating systems (Linux 2.4 custom distribution) provides maximum flexibility and interoperability between all devices in the network. Copperfield-2 (of Aeronix Inc. Melbourne, FLA) was designed from the ground up to provide a modular payload infrastructure that can be adapted to changing needs and requirements. This capability is used in the TacSat-1 spacecraft; the addition of support hardware for the visible camera, via the PCI bus allows the "frame grabber" card to be used by the general-purpose processor, and the frame grabber card manufacturer's driver to be used with minimal modifications. 8)
Component | Vendor | OS (Operating System) | Processor |
HSI (High Speed Interface) | Bright Star Engineering (custom adapter board) | Linux 2.4 custom distribution | PowerPC, MPC823 |
IDM UHF Modem | Innovative Concepts | Proprietary | PowerPC 860 |
Copperfield-2 MR.DIG Card | Aeronix/NRL | Linux 2.4 custom distribution (DENX ELDK-based) | PowerPC PowerQuicc II 8260 |
RF Front End Controller | Bright Star Engineering (custom adapter board) | Linux 2.4 custom distribution | StrongARM SA1110 |
The HSI (High Speed Interface) module
Designed specifically to serve as the bridge to capitalize on the Ethernet TCP/IP standards-based architecture and the OX.25 interfaces. HSI provides a 2MB synchronous serial bus connected to the spacecraft communication controller. The HSI hardware is implemented as a combination of FPGA hardware and a BSE ip-Engine general-purpose PowerPC 823 embedded processor. The HSI system allows multiple processes and Ethernet-connected computers to access the data stream sent to the spacecraft. The extensive use of TCP/IP-based systems and the common Linux operating system provided unique opportunities for a distributed development environment. The developers were able to test communications between payload elements at each step in the design process, from developing on a standard PC to final communications before inserting the custom hardware required to communicate with the bus.
Imaging Package
The imaging package utilizes two commercial cameras: one for color imagery in the visible range, the other for observation of infrared imagery. In both cases, NRL ruggedizied and shielded each camera for spaceflight use. Two imaging cameras have been included to provide intuitive data for the SIPRNet tasking and data dissemination part of the experiment. 9)
• The HanVision HVDUO-F7 Industrial Camera (HanVision Co. Ltd. of Daejeon, South Korea) uses new technology to simultaneously image red, green, and blue on each pixel. The HVDUO-F7 digital color camera is using the "Foveon X3™ Pro 10 M" CMOS color image sensor featuring 24 bit digital color output, 2268 x 1152 x 3 photodetectors and 3 FPS output (the detectors can be scanned at up to three frames/s) in CameraLink format. Real-time image processing is provided. The spatial resolution of the data is 70 m.
• The infraSPOT Indigo Omega infrared camera uses new technology for thermal imaging, namely a microbolometer FPA, which does not require cryogenic cooling, thereby reducing complexity in size, weight, and power. The camera collects radiation in the spectral range 7.5-12 µm providing a resolution of 850 m. 10)

References
1) M. Hurley, T. Duffey, C. Huffine, K. Weldy, J. Cleveland, J. Hauser, "Engineering a Responsive, Low Cost , Tactical Satellite, TacSat-1," Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 9-12, 2004
2) J. Raymond, G. Glaros, J. Hauser, M. Hurley, "TacSat-1 and a Path to Tactical Space," AIAA 2nd Responsive Space Conference, Los Angeles, CA, April 19-22, 2004, RS2-2004-5003, URL: https://web.archive.org/web/20060516001636/http://www.responsivespace.com/Papers/RS2/SESSION%20PAPERS/SESSION%205/HURLEY/5003P.pdf
3) T. Doyne, P. Wegner, R. Riddle, M. Hurley, M. Johnson, T. Duffey, "TacSat and ORS Activity," Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
4) http://www.globalsecurity.org/space/systems/tacsat-jws.htm
5) B. Berger, "Pentagon Cancels TacSat-1 Mission," Space News, Aug. 27, 2007, p. 18
6) J. Singer, "TacSat Ground System Designed to be Interactive," Space News, Jan. 23, 2006
7) C. M. Huffine, "Rapid Satellite Payload Development for TacSat-1," http://www.nrl.navy.mil/content.php?P=04REVIEW212
8) C. M. Huffine, "Linux on a Small Satellite," Linux Journal, Article 7767, March 2005, URL: http://www.linuxjournal.com/article/7767
9) M. Hurley, "Tactical Microsatellite Experiment (TacSat-1)," http://www.nrl.navy.mil/content.php?P=04REVIEW207
10) http://code8200.nrl.navy.mil/TacSat.htm
This description was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" - comments and corrections to this article are welcomed by the author (eoportal@symbios.space).