TAIKI Hyperspectral EO Mission
EO
Land
Multi-purpose imagery (land)
Vegetation
Quick facts
Overview
| Mission type | EO |
| Agency | Hokkaido Institute of Technology |
| Mission status | Planned |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Vegetation |
| CEOS EO Handbook | See TAIKI Hyperspectral EO Mission summary |
TAIKI Hyperspectral EO Mission
Overview
TAIKI (is the name of a town in Japan, it means also “big tree” in Japanese) is an Earth observation microsatellite technology demonstration mission under development at the Hokkaido Institute of Technology (HIT), Sapporo, Hokkaido, Japan. The Space-Science Industries Program was kicked off in 2003 in Hokkaido by a volunteer group consisting of students, researchers and engineers from industry to demonstrate technologies like hyperspectral imaging along with an experimental high-rate optical (laser) data transmissions on a microsatellite.
The TAIKI project was preceded by HIT-Sat, a nanosatellite (2.7 kg) of the Hokkaido Institute of Technology to demonstrate the new bus technologies. HIT-Sat was launched as a secondary payload to Solar-B (Hinode) on Sept. 23, 2006. The TAIKI spacecraft will adopt the proven technologies flown on HIT-Sat.
The observation objectives of the TAIKI mission are: 1) 2)
• To provide hyperspectral imagery for agricultural applications
• To acquire visualization of Earth warming by measuring NDVI (Normalized Differential Vegetation Index)
• To provide high quality video data of Earth's surface using a HDTV (High Definition Television) camera.

Spacecraft
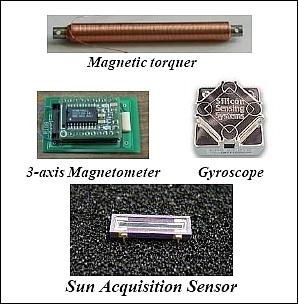
The microsatellite is stabilized with a gravity gradient boom and with a 3-axis magnetic torquer providing an attitude accuracy of about ±2º. Most components of the ACS (Attitude Control Subsystem) are COTS (Commercial Off The Shelf) parts. 3) 4)
The ACS is a bias momentum 3-axis stabilized subsystem. The objective of ACS is to maintain the attitude of the satellite to the Earth within ±2º around 3-axis during Earth observation (imaging) and laser communication. In addition, an attitude stability of 0.03º/s is required for realizing the stabilized laser communication. The attitude is sensed with a spin-type sun acquisition sensor (SSAS), a 3-axis geomagnetic aspect sensor (GAS), and three 1-axis gyroscopes. Actuation is provided by a momentum wheel and 3-axis magnetic torquers (MTQ). The momentum wheel provides the satellite with bias-momentum of 0.84 Nms.
Spacecraft mass, size | 50 kg, 50 cm x 50 cm x 50 cm |
EPS (Electrical Power Subsystem) | Body mounted solar cell panels |
ACS (Attitude Control Subsystem) | Gravity gradient stabilization |
C&DHS (Command & Data Handling Subsystem) | CPU: 32 bit RISC, MPU (SH4) |
Communication subsystem | Downlink: Ku-band transmitter at 10 Mbit/s, BPSK modulation, 0.2 W output |
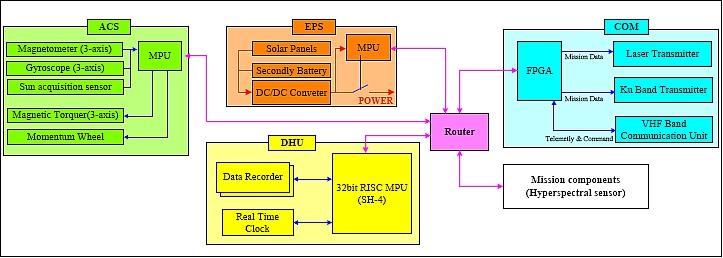
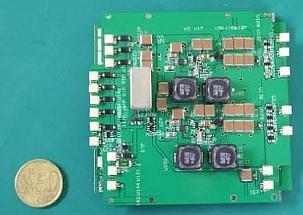
EPS (Electrical Power Subsystem): EPS consists mainly of a PCU (Power Control Unit), secondary batteries and solar panels. The basic design has been demonstrated by the HIT-SAT mission. EPS employs a body mounted solar array panels using triple-junction solar cells with a conversion efficiency of 26.8%.. The solar array panels are arranged on 5 outer surfaces. The Li-ion-polymer battery has a capacity of 910 mAh; the configuration uses 5 parallel sets of 2-series batteries. The PCU employs PPT (Peak Power Tracking) control using a 16 bit microprocessor (H8/3048F) and a DC/DC converter (Figure 4).
DHS (Data Handling Subsystem): The spacecraft bus and mission components are integrated by the DHS which uses a high-speed 32 bit RISC processor (Renesas Technology, SH-4, 300 MIPS). The microprocessor is selected from commercial components and is not radiation-hardened. The processor is expected to experience SEU (Single Event Upsets) during approximately 3 month in orbit. For self-diagnosis, the DHS is equipped with the functions of limit check, verification of the executed commands, device check, and watchdog timer. For autonomous control, the DHS uses the functions power off and reset of each component.

Communications: TAIKI is equipped with an RF (Radio Frequency) communication system consisting of a Ku-band transmitter, a VHF transmitter and receiver, and in parallel an optical LCS (Laser Communication System). The Ku-band transmitter has been developed by the Micro LAB, Co., Ltd at Kagoshima, Japan. It employs BPSK (Binary Phase Shift Keying) modulation at 10 Mbit/s, the output power is 200 mW.
The experimental LCS system is described below. The high-volume payload data may be downlinked either with the LCS transmitter at 100 Mbit/s or in the RF Ku-band at 10 Mbit/s. It should be noted that the laser can not be used in the bad weather or during orbital night phases. Thus, the Ku-band transmitter, which is the backup transmitter for laser communications, will be effectively used under these conditions.
The VHF links are being used for the transmission of TT&C (Telemetry Tracking & Command) data in uplink and downlink at data rates of 9.6 kbit/s.
Parameter | Uplink (VHF) | Downlink (Ku-band) |
Frequency | 150 MHz | 20 GHz |
Bandwidth | 16 MHz | 12 MHz |
Gain on transmit | 16.15 dB | 19.6 dBi |
Gain on receive | 2.15 dBi | 38.74 dB |
Transmit power | 50 W | 0.2 W |
Propagation distance | ~ 1000 km | |
Receiver noise temperature | 23 dBK | |
G/T [(receiver) Gain / (noise) Temperature] | 30 dBK | |
Link margin | 4 dB | |
C/N | 60.515 dB | 96.862 dB |
Launch
A launch of the TAIKI microsatellite as a secondary payload is planned for 2012.
Orbit: Sun-synchronous orbit, altitude ~ 620 km.
Sensor Complement
LCS (Laser Communication System)
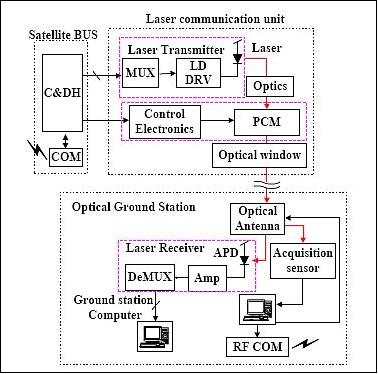
LCS is being realized only for the high-rate downlink data transmission. It is comprised of a laser transmitter, an optical unit, and a pointing control mechanism. The laser transmitter consists of a laser diode and electrical circuits for the laser driver and TDM (Time Division Multiplexer). The laser receiver consists of an APD (Avalanche Photo Diode), amplifier circuits, and demultiplexer. The laser communication method employs the IM/DD (Intensity Modulation / Direct Detection) modulation technique. The laser receiver type is a transimpedance amplifier. 5) 6)
The laser acquisition and tracking sequences consist of three parts, the coarse pointing control, the scan control and the tracking control.
• First, the satellite orbital information and the ground station position information are used for determination of coarse laser pointing angle.
• Second phase is scan control and searching for the received optical antenna of the ground station. The scan range is ±3º.
• After the optical acquisition sensor has received the transmitting laser, the ground station transmit feedback signal to the satellite is realized by RF communications. The feedback signal contains the angel error and the received intensity. The feedback signal is used for tracking in position of receiving maximum intensity. When the received intensity is over a threshold value, the data downlink starts using the laser communication.
Parameter | Requirement |
Wavelength | 830 nm |
Laser output power | 1.5 W |
Beam divergence | 1 mrad |
Transmitter diameter | 8 mm |
Instrument mass, power consumption | 3 kg, 4 W |
Receiving antenna (ground station) | 100 cm diameter, Cassegrain type |
FOV of receiving antenna | ±1.5º |
Downlink data rate | 100 Mbit/s |
Bit rate error, signal format | < 10-6, NRZ (Non-Return Zero), Time Division Multiplex |
Modulation | IM/DD (Intensity Modulation / Direct Detection) |
The LCS requires high accuracies of pointing control between the satellite and the ground station because of the directional characteristics of the laser beam. This implies a high accuracy pointing control device onboard the spacecraft with a wide range of angular pointing capability. In addition, the device must be of low mass and of low power consumption to fit into a microsatellite.
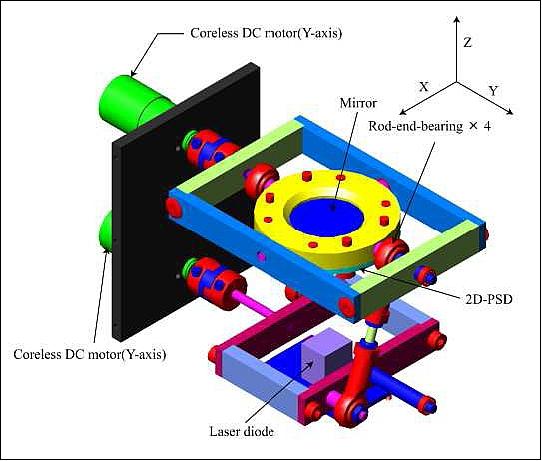
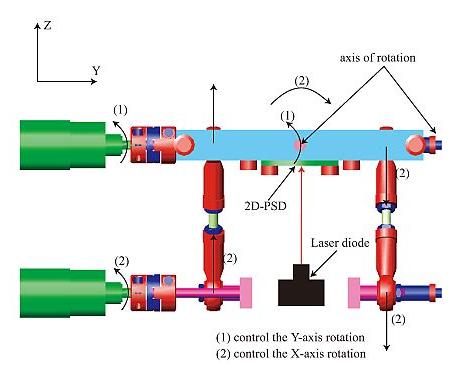
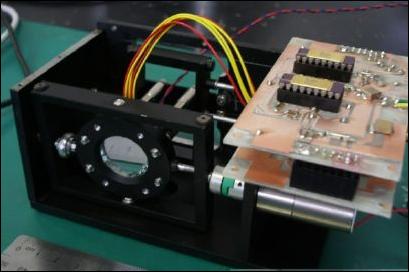
PCM (Pointing Control Mechanism): A two-axis PCM device was developed for pointing and tracking control of the laser beam to direct the receiving antenna of the ground station (Figures 7 and 8). The PCM device consists of three major components: steering mirror mechanism, angular sensor and electrical unit. The steering mirror mechanism has two coreless DC motors and four rod-end-bearings. The rod-end-bearings are used for mechanism of drive transmission. Thus, the drive transmission of an axial rotation with an angle is possible. The two motors can be placed outside of rotational system.
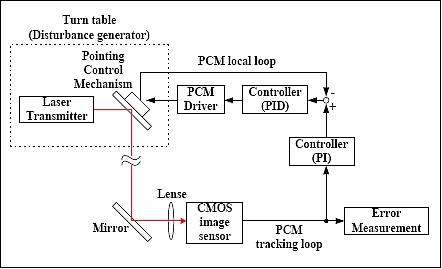
Compared to a general two-axis azimuth-elevation gimbal configuration, the PCM design offers the advantage of a low internal disturbance, and lightweight. The angular sensor consists of a 2D-PSD (2 dimensional Position Sensitive Detector) and low power laser diode. The pointing angle of the steering mirror is controlled by the input value of the angular sensor.
Mass, size | 2 kg, 68 mm x 76 mm x 141 mm |
Power consumption | 1.5 W |
Pointing range (angular tracking velocity) | > 5º /s |
Pointing accuracy | < 300 µrad (3σ) |
Actuator | Coreless DC motor |
Feedback sensor | 2D- PSD |
Controller | Microcomputer: 32bit RISC (SH2) |

HSC-III (Hyperspectral Camera-III)
Background: At HIT, the design and development of hyperspectral sensor instrumentation was started in 2003. Initially, this involved the manufacture of the HSC-1.0 and HSC-1.5 imagers as the laboratory models. This was followed by an airborne imager, HSC-1.5 (Hyperspectral Camera-1.5). The instrument was flown along with an IRU (Inertial Reference Unit). 7) 8) 9) 10)
In a follow-up step, the hyperspectral camera HSC-1700 was developed as a spin-off product, featuring an integrated sensor unit and a scanning mechanism. This imager featured 72 bands in a spectral range of 400-800 nm with a detector size of 640 x 480 pixels. The data quantization was at 8 bits and the sampling rate was 30 frames/s. The HSC-1700 spin-off imager created a lot of interest in industry and government alike when it was released into the market.

Spaceborne HSC-III Imager
The development of the HSC-III (or simply HSC) pushbroom imager was started at HIT in January 2008 based on the optical design of the HSC-1700 model. - The key requirements of the HSC-III instrument call for a GSD (Ground Sample Distance) of 15 m (swath of 15 km), a spectral range of 400-1000 nm containing 138 bands (although only 75 bands are transmitted), an SNR of > 100, and an instrument mass of ~ 10 kg. The overall objectives are to demonstrate the technology in orbit and to use the imagery in support of practical applications such as agricultural monitoring. 11) 12)
HSC, the primary instrument of TAIKI, is a VNIR hyperspectral sensor developed mainly by the Hokkaido Institute of Technology and Hokkaido University. The HSC is manufactured in cooperation with industrial companies under an academic-industrial partnership. HSC has a modular and flexible configuration to make the instrument suitable for other small satellite missions as well.
The HSC-III instrument consists of the telescope unit, a long-slit imaging spectrometer, the detector and electrical assembly, the calibration unit, and the IRU (Inertial Reference Unit). The spectrometer is equipped with a direct vision prism and covers wavelength range from 450-1000 nm. The dispersing element can be replaced with a transmitting grating with slit and relay lens unit. The spectral specifications are customized by replacing the dispersing element. Hence, it becomes a flexible spectrometer to suit the end-user’s applications.
The HSC-III features a fast and compact optical system (telescope and spectrometer). To achieve high optical throughput the dispersing element has been chosen to be a prism type. The HSC will achieve approximately 60 m of spatial effective resolution. The lens system consists of only spherical lenses. The imaging data is recorded at a frame rate of 500 Hz. Detection is provided with an array detector assembly using the back-illuminated CMOS imaging technique. The detector has a size of 1084 x 1024 pixels with a pixel size of 10.8 µm.
Observation configuration | Pushbroom type imaging detector array |
GSD (Ground Sampling Distance) | 15 m (from a nominal altitude of 620 km) |
Spatial effective resolution | 50-60 m |
GSD (Ground Sample Distance) | 15 m |
Swath width | 15 km |
Spectral range (VNIR) | 400-1000 nm |
Frame rate | 500 Hz |
Dynamic range | 10 bit |
Telescope aperture, f number | 150 mm, f/3.0 |
Telescope type | Cassegrain reflective telescope with correcting lenses (a catadioptric optical system) |
FOV, IFOV Instantaneous Field of View) | 1.38º, 24 µrad |
SNR (Signal-to-Noise-Ratio) | > 100 (peak) |
Instrument mass | ~ 10 kg |
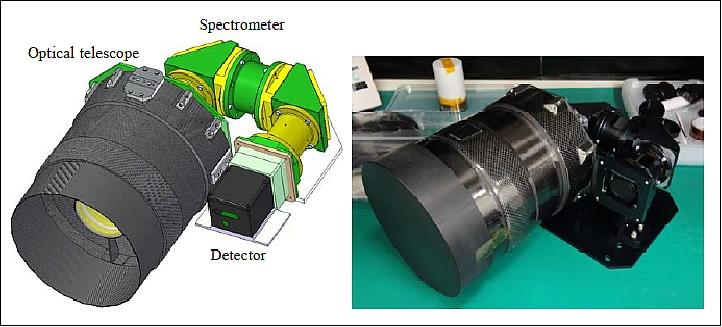
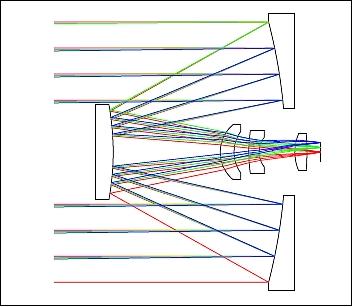
Optical telescope: A Cassegrain reflective telescope has been selected with correcting lenses, referred to as catadioptric optical system. The telescope aperture is 150 mm with a FOV of 1.38º. The instantaneous field of view (IFOV) is 24 µrad to acquire a GSD of 15 m at an altitude of 620 km.
The optical layout for the telescope is shown in Figure 14. The figure illustrates a field of incident angle from 0º to 0.69º. The correction lens system consists of only spherical lenses. An achromatic system is realized even though these lenses are only of one material. The lenses have a radiation hardening property. The optical telescope is also an image-sided telecentric system. The telescope structure consists of CFRP (Carbon Fiber Reinforced Plastic) material. The primary mirror is made of Clearceram® of OHARA, Inc., Japan, and the secondly mirror is made of fused silica.
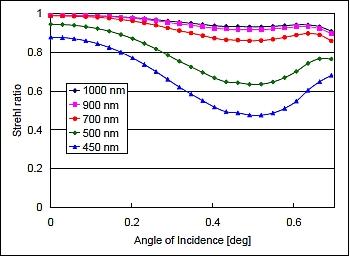
The result of the optical design shows that a high imaging quality is being achieved. Figure 15 shows the Strehl ratio as a function of field position. Although the worst case is < 0.5 at wavelength of 450 nm, the Strehl ratio over the field position at near infrared band is greater than 0.8. Thus, the optical telescope was designed as a nearly diffraction-limited system close to the near-infrared band. However, the spot size at the shortest wavelength is sufficiently smaller when compared with the pixel size of the detector.
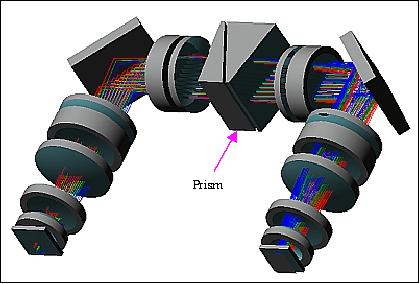
Spectrometer: The lens system consists of only spherical lenses. It is also a telecentric system. The direct vision prism, combined with S-FPL53 and L-NBH54, is employed as the dispersing element. A spectrometer based prism features high throughput optics. The spectral sampling interval varies from 1.2 nm to 16 nm as illustrated in Figure 17. Not shown in Figure 17 is the constant sampling interval; also, the spectrometer provides coarser spectral sampling intervals in the upper region of the NIR (Near-Infrared) band. The NIR band region provides a lower sensitivity than the visible band region of the spectrum (longer wavelengths result in less spectral resolution). The same logic of a lower sensitivity in the NIR band applies also to the detector. Due to these given facts, it turns out that the NIR region SNR drops to rather low levels if a constant spectral sampling level is maintained. However, fairly high level SNR values can be obtained in the NIR bands if a coarser bandwidth is selected in this region.
The dispersing element can be replaced with transmitting grating. The prism spectrometer features high-throughput. It is not affected by second order diffraction light such as a grating system. On the other hand, it is difficult for a prism spectrometer to acquire high spectral resolution. A grating spectrometer, equipped with an optical filter to cut off second order diffraction light, acquires high spectral resolution and provides a constant sampling interval. The HSC spectrometer offers flexibility; the dispersing element can be replaced with another one to suit the user’s needs. The HSC spectrometer with a transmitting grating covers a wavelength range from 450-900 nm, acquiring a spectral sampling interval of 5 nm, if the grating frequency is 30 lines/mm.
F number | 3.0 |
Magnification | 1:1 |
Dispersion element | Direct vision prism |
Spectral range | 450-1000 nm |
Spectral sampling interval | 1.2 nm – 16 nm |
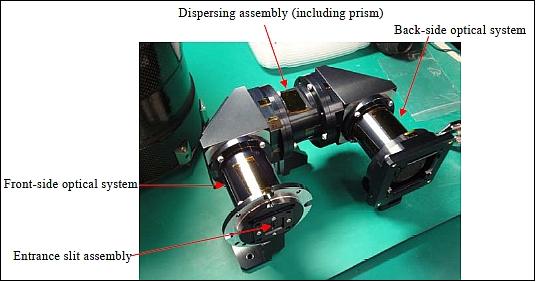
The HSC spectrometer proto-flight model (Figure 18) is comprised of entrance slit assembly, front-side optical system, dispersing assembly and back-side optical system.
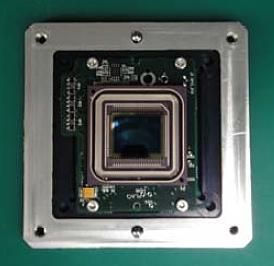
Detector assembly: A 2D detector array is used to cover the spectral and spatial information in an image cube configuration. A frame rate of > 500 Hz is needed to realize a GSD of 15 m in a pushbroom design. The detector array (Figure 19) is a back-illuminated imaging device, featuring 1280 x 1024 pixels with a pixel size of 10.8 µm. The frame rate of the detector is 500 Hz when the ROI (Region of Interest) function is used; however, it is 30 Hz when using the full frame. In this case, the detector acquires 1000 pixels for spatial data and 75 pixels for spectral data. There are 138 bands in the spectral range (450 -1000 nm) of the spectrometer. However, only 75 full bands are transmitted, which cover the spectral range 550-1000 nm sufficiently.
A back illuminated CMOS image sensor based detector with a quantum efficiency (QE) of ~85% (at 650 nm) is selected from Intevac Photonics. The detector is a commercial component, but has the advantage of a 100% fill factor, high-QE, low-read noise, low-dark charge, flexible ROIC (Readout Integrated Circuit) settings, and high-frame rate (230 frames/s by using ROIC).
HSC electrical assembly: The HSC instrument employs a flexible configuration and interface design to be flown on various microsatellite missions. The MDHS (Mission Data Handling Subsystem) offers a high versatility for data handling and interfaces. The subsystem integrates an FPGA, a mass memory and some peripheral components (Figure 20).

The MDHS and satellite bus subsystem are interfaced with a SpaceWire communications bus using RMAP (Remote Memory Access Protocol). RAMP provides a means for standard read/write commands over SpaceWire as well as easy data access. The detector board generates an image data stream of 1.23 Gbit/s. This source data is stored in the mass memory via the FPGA. The data storage devices are comprised of Flash SSD (Solid State Drive) and DRAM (Dynamic Random Access Memory). The Flash SSD is a device which uses solid-state memory; it is composed of flash non-volatile memory. The device uses the SATA (Serial Advanced Technology Attachment) II technique which is capable of write speeds of up to 1.6 Gbit/s.
A hyperspectral image of HSC has a volume of ~150-600 MByte. Hence, a lot of data reduction is required to be able to handle the downlink in a microsatellite. The following on-board functions are implemented:
1) Data extraction: Spectral bands can be extracted for the downlink
2) To chip part of any spatial sizes
3) Data compression: Use of compression techniques to reduces the data stream.

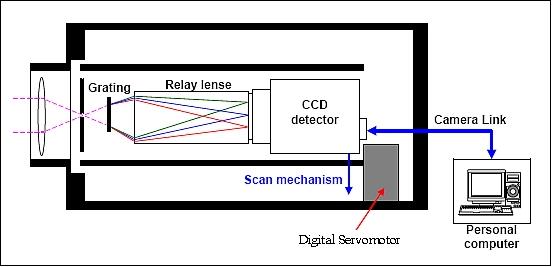
BBM (Breadboard Model): A BBM of the HSC-III optics subsystem was developed in 2008. This project was funded by NEDO (New Energy Development Organization) of Tokyo. The BBM features a spectral range of 400-1000 nm, 61 spectral bands, a radiometric resolution of 10 bits, and a sampling rate of 200 frames/s. It is equipped with a CCD image sensor which has low QE compared with the back-illuminated CMOS image sensor.
Mass, power, size | 1.5 kg, 3.3 W, 245 mm x 95 mm x 85 mm |
Spectrometer | Transmitting grating |
Spectral range | 400-1000 nm, spectral resolution = 5 or 10 nm (61 bands) |
Data digitization | 8 or 10 bit |
Detector | CCD image sensor, QE: 0.36 @ 620 nm, Frame rate: 200 1/s |
Detector size | 640 x 480 pixels |
Communication interface | Camera Link® |

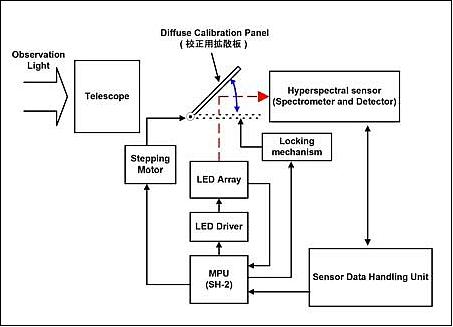
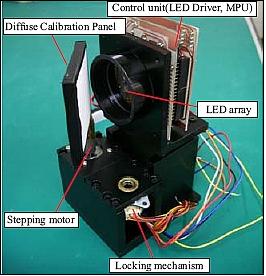
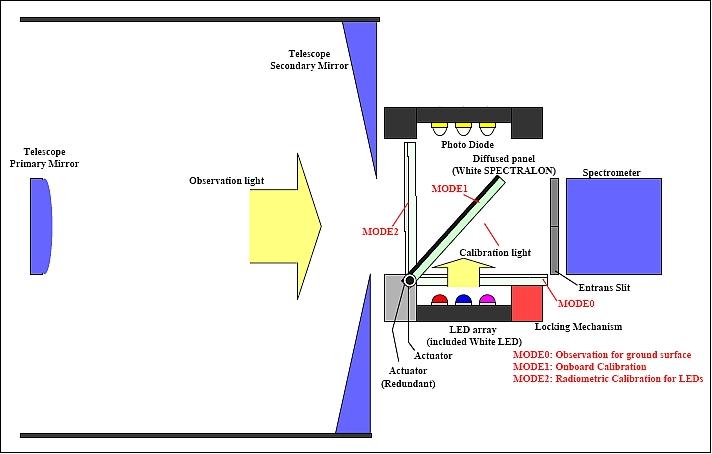
HSC-III calibration: A LED (Light Emitting Diode) is being used as the inner calibration radiance source. The advantages of a LED light source provides high energy efficiency, long life, and small size and design flexibility.
The OCE (On-orbit Calibration Equipment) consists of 6 high-intensity visible LEDs, an infrared LED, a diffuse calibration panel, and an electrical circuit. OCE can switch between observation mode and calibration mode using a changeover mechanism (stepping motor). The diffuse panel is manufactured by Spectralon. The OCE performance was evaluated by comparing it with the conventional method using the spectral line of mercury. The performance of OCE was excellent so that a spectral calibration accuracy of 0.02 nm was achieved.
References
1) Y. Aoyanagi, T. Kato, T. Yasunaka, T. Uematsu, S. Satori, “Hokkaido Institute of Technology Development of Breadboard model of Laser Communication System for Hokkaido Satellite “TAIKI”,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08-B4.4.B.06
2) Yoshihide Aoyanagi, Shin Satori, Ryuichi Mitsuhashi, Tsuyoshi Totani, Toshihiko Yasunaka, Akihiro Nakamura, Yusuke Takeuchi, “Advanced System of Micro Satellite for Hyperspectral Remote Sensing Mission,” Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-VII-1
3) “The earth observation micro-satellite“TAIKI” bus subsystem outline,” document provided by Yoshihide Aoyanagi of HIT
4) Seiji Matsuda, Hiroshi Kanai , Takayoshi Fuji, Motoki Hinada, Mitsuteru Kaneoka, “An Affordable Micro Satellite Launch Concept in Japan,” 6th Responsive Space Conference, April 28–May 1, 2008, Los Angeles, CA, USA, URL: https://web.archive.org/web/20140705200111/http://www.responsivespace.com/Papers/RS6/SESSIONS/SESSION%20V/5004_MATSUDA/5004P.pdf
5) Y. Aoyanagi, T. Kato, T. Yasunaka, T. Uematsu, S. Satori, “Breadboard model of Laser Communication System for Hokkaido Satellite TAIKI,” Proceedings of the 26th ISTS (International Symposium on Space Technology and Science) , Hamamatsu City, Japan, June 1-8, 2008, paper: 2008-j-01
6) Shin Satori, Ryuichi Mitsuhashi, Tatsuhiro Sato, Soichiro Ueno, Tsuyoshi Totani, Kosei Ishimura, Satoshi Era, Akihiro Nakamura, Kotari Hori, Misturu Fukusima, Naoki Noro, “Hokkaido Satellite Project: Business Model,” Proceedings of 25th ISTS (International Symposium on Space Technology and Science) and 19th ISSFD (International Symposium on Space Flight Dynamics), Kanazawa, Japan, June 4-11, 2006, paper: 2006-r-1-12
7) Yoshihide Aoyanagi, Shin Satori, Tsuyoshi Totani, Toshihiko Yasunaka, Akihiro Nakamura, Yusuke Takeuchi, “Development of Spaceborne Small Hyperspectral sensor HSC-III for Micro Satellite,” Proceedings of the 7th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, May 4-7, 2009, IAA-B7- 0307P
8) Shin Satori, Yoshihide Aoyanagi, S. Nishizato, T. Totani,, Urumi Hara, T. Yasunaka, A. Nakamura, Y. Takeuchi,, “Development of Hyperspectral sensor for Hokkaido Satellite “TAIKI”,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B4.4.A5
9) S. Satori, Y. Aoyanagi, U. Hara, R. Mitsuhashi, Y. Takeuchi, “Hyperspectral sensor HSC3000 for nano-satellite TAIKI,” Proceedings of SPIE, 'Multispectral, Hyperspectral, and Ultraspectral Remote Sensing Technology, Techniques, and Applications II,' Edited by Allen M. Larar, Mervyn J. Lynch, Makoto Suzuki, Vol. 7149, Nov. 2008, pp. 71490M-71490M-9
10) Yoshihide Aoyanagi, Shin Satori, Yusuke Takeuchi, “Breadboard model of On-orbit Calibration Equipment for small Hyperspectral sensor,” Proceedings of the 27th ISTS (International Symposium on Space Technology and Science) , Tsukuba, Japan, July 5-12, 2009, paper: 2009-n-10
11) Y. Aoyanagi, T. Totani, K. Yamaguchi, A. Nakamura, N. Takeyama, Y. Kanai, S. Satori, “Status of VNIR Hyperspectral Sensor HSC-III development: Optical and Data Acquisition Subsystem,” Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.4.7
12) Yoshihide Aoyanagi, Tsuyoshi Totani, Kouji Yamaguchi, Norihide Takeyama, Shin Satori, “Design and Ground Testing of Compact and Versatile Hyperspectral sensor HSC,” 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011,
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).