TEAMSAT (Technology, science and Education experiments Added to Maqsat)
EO
Atmosphere
Mission complete
EUMETSAT
Quick facts
Overview
| Mission type | EO |
| Agency | EUMETSAT |
| Mission status | Mission complete |
| Launch date | 30 Oct 1997 |
| End of life date | 03 Nov 1997 |
| Measurement domain | Atmosphere |
| CEOS EO Handbook | See TEAMSAT (Technology, science and Education experiments Added to Maqsat) summary |
TEAMSAT (Technology, science and Education experiments Added to Maqsat)
Overview
TEAMSAT (Technology, science and Education experiments Added to MaqSat) is an ESA/ESTEC low-cost satellite qualification mission, the first spacecraft delivered successfully to orbit by the Ariane-5 launcher on its second qualification flight.
Background: The YES (Young Engineers' Satellite) concept was initially proposed at the IAF (International Astronautical Federation) Conference in Beijing in Oct. 1996 by by Delta-Utec, a Dutch space engineering company (Leiden) specialized in tether applications, in response to a unique flight opportunity. After the explosion/failure of the first Ariane 5 qualification flight (launch on July 4, 1996 of Ariane flight 501 with the Cluster-I payload of four satellites), an extra qualification flight was inserted: Ariane 502. The upper payload was initially planned to be a 2000 kg dummy satellite only. The possibility to fly a small tethered payload that could be designed quickly and without mass constraint was recognized by W.J. Ockels at ESTEC, responsible for for the ESTEC Young Graduate Trainee (YGT) program. He challenged Delta-Utec to come up with a viable plan. As a consequence, YES was accepted as an Ariane 502 payload, in combination with a series of university experiments (TEAM). The two satellites YES and TEAM were to be mounted in a single strong box, named TEAMSAT, ensuring safety during launch. 1) 2) 3) 4)
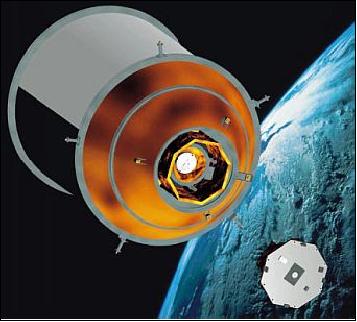
The overall Ariane 502 demonstration payload (with a total mass of 4640 kg) was made up of 3 components:
• The lower instrumented MaqSat-B (Maquette Satellite-Bas) dummy payload with a mass of 2340 kg
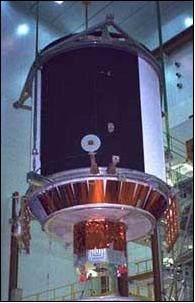
• The upper instrumented MacSat-H (Maquette Satellite-Haute) dummy payload a cylinder with a mass of 2300 kg and a height of 5 m. Both MaqSats were built by Kayser-Threde of Munich, Germany. The MAQSAT-H satellite was painted with contrasting patterns (75% white and 25% black) to support testing and calibration of ground-based optical and radar stations in Europe. The main goal of these experiments was to demonstrate tracking and identification space debris. The constrating paint would also allow detection of the rotation or tumbling of Maqsat-H.
• The TEAMSAT spacecraft, an embedded payload (with a mass of 350 kg) of MaqSat-H. TEAMSAT was developed and built at ESA/ESTEC and carried five experiments provided by various European universities.
Very tight experiment development and S/C schedules (of TEAMSAT) of only one year from project proposal to launch resulted due to the late decision to grab a free-flight opportunity on Ariane 502 (along with the acceptance of all flight constraints) for 'hands-on' experimentation. In the end, over 40 young trainees and students from ten European countries along with experienced ESA engineers were actively involved in the TEAMSAT project. 5) 6) 7)
Spacecraft
The TEAMSAT S/C structure consisted of a closed aluminum box of octagonal form (0.755 m high and a diameter of 0.944 m) containing the electrical system, the experiments and the ejection mechanism for YES. The TEAMSAT mass of 350 kg was part of the MaqSat-H structure. [Total mass of the MaqSat-H platform was 2300 kg; still another platform on this flight was MaqSat-B]. TEAMSAT electrical power was provided by three NiCd batteries. Mission operations was provided through ESA/ESOC. From a technology point of view, TEAMSAT's achievements included: 8) 9)
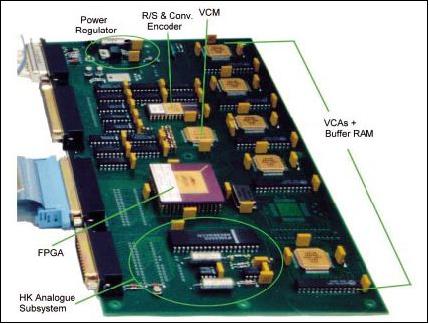
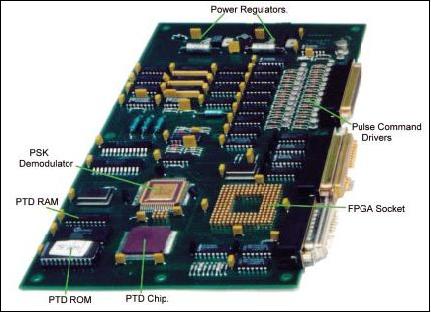
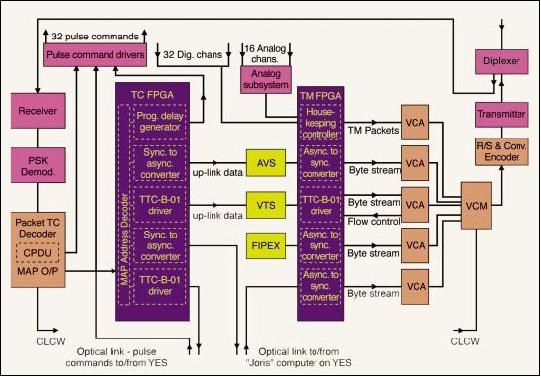
• TEAMSAT is the first ESA S/C flown with telemetry and telecommand systems both fully compatible with ESA/CCSDS standards and the first S/C to exploit the adaptive asynchronous telemetry capabilities they support. Use of new chips for telemetry transfer frame generation. Dynamic bandwidth allocation without the use of an on-board computer. First ESA S/C to use the standard packet telecommand protocols.
• Use of a quadrifilar helix antenna for 100 MHz to 3 GHz links. The same system is scheduled to be flown on Metop-1.
• Demonstration of GPS reception from above the GPS satellite constellation.

Launch
A launch of the TEAMSAT/YES-on-MaqSat-H assembly on the Ariane-5 vehicle (flight 502) took place Oct. 30, 1997 from Kourou.
The TEAMSAT mission ended on Nov. 3. 1997. After four days of intensive operations the available battery energy had been consumed as planned.
Orbit: GTO (Geostationary Transfer Orbit) achieved: Perigee = 531 km, apogee = 26,746 km, inclination = 7.76º, period = 7 hours, 40 minutes (the nominal orbit was: 581 km x 35,926 km with a period of 10.7 hours).
Mission Status
The payload of Ariane flight 502 reached an orbit somewhat different from the nominal GTO orbit (period 7.8 hours instead of 10.7). Then, TEAMSAT was ejected from MaqSat-H without spin stabilization (as a result of safe mode), ending up in a nearly flat spin almost perpendicular to the intended direction.
The first part of the mission was reserved for the TEAMSAT experiments, depleting part of one of the large batteries inside YES via a set of banana plugs. Contact with YES was reserved for health checkouts and preliminary measurements. The communication link was limited to one satellite at a time, so there was continuous switching required between YES and TEAMSAT.
In the 9th orbit (3 days), ejection of YES was planned, with 2 TEAMSAT cameras witnessing the event. The ejection would also expose the 2 cameras on YES as well and the 2nd antennas of both TM and GPS, thus enhancing their coverage to omni-directional.
All TEAMSAT experiments so far had gone fine and were on schedule. However, during the 6th orbit, project operations was unable to switch on the YES telemetry, despite numerous trials. Later on, it was discovered that YES had already been ejected. This caused a search for YES with ground-based cameras and with the TEAMSAT cameras VTS and AVS.. Communication with YES could not be re-established. The search was ended about 96 hours after launch (4 days). The new orbit of YES was later confirmed by radar tracking and optical images taken from the ground.
Since YES has not been operated after its ejection, its mission (i.e. tether deployment) was never performed and can therefore be considered a “failure”, in contrast to the overwhelming success of the other TEAMSAT experiments.
Sensor Complement
AVS (Autonomous Vision System)
AVS is provided by the Danish Technical University (DTU), Lyngby, Denmark. AVS is of ASC (Advanced Stellar Compass) heritage flown on Ørsted. AVS is an advanced star compass which automatically recognizes the star field and tracks non-stellar objects (like satellites, comets or asteroids). AVS consists of two units: a lightweight CCD camera (0.18 kg, 0.4 W) and a DPU (Data Processing Unit) based on 486 technology (0.75 kg, 5 W). The microcomputer of the DPU is radiation tolerant. More than 11,000 stars are stored in memory. AVS is capable of:
• Identifying guide stars in spin-stabilized mode
• Autonomously determine the attitude in a three-axis stabilized or slow spin mode
• Identify non-star objects
• Track or image a detached probe
• Compress image/data for ground analysis
AVS was used in particular during the initial phases of the mission to determine the attitude and orbit of the S/C and to study the autonomous operations during severe radiation dose-rates in GTO. A thin shielding of the AVS was used to achieve a full lifetime dose during the battery-limited lifetime of TEAMSAT. 10) 11)
FIPEX (Flux Probe Experiment)
FIPEX is provided by the University of Stuttgart (FIPEX is of TEXUS sounding rocket campaign heritage). The objective is the measurement of atomic oxygen concentration at different orbital altitudes (> 200 km up to 1000 km) to study erosion and degradation of optical surfaces in orbit; the data are also valuable for the verification of numerical models used in re-entry aero-thermodynamics. Oxygen is measured on the principle of electrolysis using a solid electrolyte (potentiometric oxygen sensor). The FIPEX instrument consists of:
• An array of five identical oxygen sensors, used to provide data redundancy and eliminate aerodynamics effects
• Each sensor head contains an oxygen sensor, a sealed reference gas volume and both a reference pressure and temperature sensor.
The sensors are pre-heated to around 600ºC to create sufficient ion conductivity within the electrolyte. The heating is feedback controlled so as to provide temperature stabilization for vacuum operation.

VTS (Visual Telemetry System)
VTS is an ESA/ESTEC instrument built by MMS (UK), IMEC (Inter-university MicroElectronics Center), Leuven, Belgium and DSS/OIP (Delft Sensor Systems/Optronic Instruments & Products) in Oudenaarde, Belgium. VTS provides a new on-board visualization technology for monitoring S/C activities (solar array deployment, etc.). VTS consists of three cameras and a master unit (up to eight off camera modules may be supported), providing JPEG-compressed (and buffered) image sequences. The master unit is a flight-spec TSC-21020 based DSP computer. Each camera module has a maximum imaging capability of 512 x 512 pixels [using APS (Active Pixel Sensor) technology with associated electronics for camera imaging control], which are digitized to 8 bits. Full-size images can be acquired at up to 1 image/s. APS provides 6 decades of dynamic range. A standard 60º FOV is provided.
A flexible system of controlling imaging sequences is provided in the master unit which includes sub-imaging and interleaving to give higher imaging rates; typically up to 16 images/s. The master unit also stores images (up to 64 full size images, 128 MByte buffer capacity) prior to acquisition by the spacecraft Data Handling System. Image compression is provided to minimize the impact on the spacecraft telemetry downlink. In normal operation two image grades are provided (100:1 and 15:1). Custom compression ratios can be provided based on trade-off of image quality and telemetry bandwidth/downlink periods. The mass of VTS is 1.7 kg.
ODD (Orbiting Debris Device)
ODD is provided by ESTEC. ODD tested the capabilities of optical and radar instruments on the ground to detect and track objects in space. For this purpose the upper Ariane 502 satellite (MaqSat-H) was covered with contrasting black and white paints of well known properties (75 % white and 25 % black). The other payloads have been left unchanged for comparison and also form part of the experiment.
YES (Young Engineers' Satellite)
YES is also a payload of TEAMSAT, in fact a tether deployment technology demonstration, designed, assembled and integrated in record time by young graduates and students at ESA/ESTEC; the project was managed and built by Delta-Utec of Leiden, The Netherlands. YES is a free-flying subsatellite (180 kg), intended to deploy a 35 km tether attached to an inert counter-balance mass of 12 kg, referred to as TORI (Tethered Orbit Insertable), to study the dynamics of tethered satellites. YES is physically the lid of the TEAMSAT box. The primary objective is to investigate tether deployment and dynamics in GTO, for the first time, and demonstrate tethered momentum transfer for future applications:
- Study of tether deployment dynamics
- Study of tether dumb-bell dynamics in an elleptic orbit
- Study of end mass attitude behavior
- Demonstrate momentum transfer by staging.
YES contained the longest tether ever brought into space: 35 km. The tether experiment is the driver for the YES design and the selection of the other (supportive) experiments.
The YES subsatellite contained also additional (secondary) experiments:
• A GPS receiver was installed to evaluate GPS reception outside the GPS constellation and to provide information on the tether dynamics and to demonstrate the use of GPS at high velocity (GTO perigee) and at high altitude (GTO apogee)
• The SF (Scintillating Fiber) detector. The SF nuclear detector module consists of three radiation measuring channels for fiber-optic-coupled SF probes. Detected radiation are fast protons and electrons. A new radiation-hardened experimental SF probe and a doped spinel crystal were flown as the third detector.
• RADFET (Radiation-sensitive Field Effect Transistor) experimentation. Three RADFETs were used to measure the total ionizing dose behind thin shielding (so-called ”skin-dose”).
• Sun senors. Seven SAS (Solar Aspect Sensors) measure the attitude of YES. Each of the seven sun sensors consists of two light-sensitive transistors mounted in an aluminium housing. On top of each transistor two baffles are mounted, forming narrow slits through which the transistor is looking out. This makes the FOV wide in one direction (about 90º) and narrow in the other (1 to 2º). As the slits on each sun sensor are perpendicular to each other, the sensors are always looking for the sun in two perpendicular planes. Together, the seven sun sensors have a 360º FOV in all three perpendicular planes through the S/C.
• Accelerometers. Test of new technologies [MNT (Micro & Nano-Technologies)] which are being considered as a possible future way to miniaturize systems and subsystems in space (measurement of vibrations). Demonstrate the LIGA/Si sensor technology for 3-axis accelerometers in space. -Two newly developed Triad 442T accelerometers were installed symmetrically with respect to the YES center of mass.
Two on-board computers were installed, JORIS (student-designed and programmed), a RISC/FPGA based computer, for control of the tether experiment, and a backup PC104 (a small version of a PC providing also the interface to two commercial cameras (QuickCam) for imagery acquisition during YES ejection. The QuickCam is a black and white commercial CCD camera, selected for its availability and commonality, performance & interfacing.
Both cameras were mounted on the top cover plate of the YES satellite and are therefore inside the TEAM box until ejection. One camera, connected to JORIS, is aimed at an open side of the tether brake assembly. A second camera is connected to a PC104 and is looking straight up, to witness the ejection of YES, but also to see the deploying tether move by as the satellite turns around its axis.
Both YES and TORI (aluminum disk) were stored in the TEAM experiment box. First YES was ejected followed shortly by TORI. In between, the tether was deployed. The TEAM box with its experiments remained attached to the Maqsat satellite.
References
1) M. Kruijff, “The Young Engineers' Satellite, Flight results and critical analysis of a super-fast handson project,” 50 th Congress of the International Astronautical Federation (IAF), Amsterdam, Oct. 4-8, 1999, IAF-99-P.1.04, 1999
2) M. Bandecchi, G. Melchior, “Teamsat: the first satellite launched by Ariane-5,” Reaching for the Skies No 18, September 1998
3) “TeamSat,” ESA Achievements, p. 201, URL: http://www.esa.int/esapub/br/br250/br250.pdf
4) TEAMSAT, a "passenger" for ARIANE 502 , URL: https://web.archive.org/web/20041224202140/http://www.servitel.es:80/paco/web/esa/prensa/press34.html
5) M. Bandecchi, W. J. Ockels, “The TEAMSAT Experience,” ESA Bulletin 95, Aug. 1998, pp. 132-143, URL: http://www.esa.int/esapub/bulletin/bullet95/BANDECCHI.pdf
6) A. Bradford, F. Müller-Stute, B. Sarti, “Engineering TEAMSAT - From Concept to Delivery,” ESA Bulletin 95, Aug. 1998, pp. 144-147, URL: http://www.esa.int/esapub/bulletin/bullet95/BRADFORD.pdf
7) S. Habinc, D. Hardy, P. Sinander, C. Smith, “TEAMSAT's Data-Handling Systems,” ESA Bulletin 95, Aug. 1998, pp. 148-151, URL: http://www.esa.int/esapub/bulletin/bullet95/HABINC.pdf
8) M. Jones, B. Melton, M. Bandecchi, “TEAMSAT's Low-Cost EGSE and Mission Control Systems,” ESA Bulletin 95, Aug. 1998, pp. 152-157, URL: http://www.esa.int/esapub/bulletin/bullet95/JONES.pdf
9) C. Smith, M. Bandecchi, S. Habinc, D. Hardy, P. Sinander, “Low-cost, ASIC-based Telemetry and Telecommand Systems - The TEAMSAT Experience,” Proceedings of the 4th International Symposium on Small Satellites Systems and Services, Sept. 14-18, 1998, Antibes Juan les Pins, France, URL: http://microelectronics.esa.int/vhdl/doc/SmallSat.pdf
10) J. L. Joergensen, et al., “Radiation Impacts on Star-Tracker Performance and Vision Systems in Space,” IAA 2nd International Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 393-396
11) M. Betto, et al., “The Determination of the Attitude and Attitude Dynamics of TEAMSAT,” IAA 2nd International Symposium on Small Satellites for Earth Observation, Berlin, April 12-16, 1999, pp. 397-400
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).