TechDemoSat-1 (Technology Demonstration Satellite-1)
EO
ESA
Ocean
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | ESA, UKSA |
| Mission status | Mission complete |
| Launch date | 08 Jul 2014 |
| End of life date | 31 May 2019 |
| Measurement domain | Ocean, Land, Snow & Ice |
| Measurement category | Sea ice cover, edge and thickness, Soil moisture, Ocean surface winds, Ocean wave height and spectrum |
| Measurement detailed | Sea-ice cover, Soil moisture at the surface, Wind speed over sea surface (horizontal), Sea-ice thickness, Significant wave height, Sea-ice Concentration |
| Instruments | SGR-ReSI |
| Instrument type | Scatterometers |
| CEOS EO Handbook | See TechDemoSat-1 (Technology Demonstration Satellite-1) summary |
TechDemoSat-1 (Technology Demonstration Satellite-1) / TDS-1
Spacecraft Launch Mission Status Sensor Complement References
Overview
In October 2010, SSTL (Surrey Satellite Technology Ltd.) was awarded a grant to commence the design phase of a UK national technology demonstration satellite called TechDemoSat-1. The UK's Technology Strategy Board (TSB) and the South East England Development Agency (SEEDA) are funding the design of the core elements of the mission. SSTL, UK industry and UK academia are funding the payload technologies. 1) 2) 3) 4)
TechDemoSat-1 (or simply TDS-1) will be the second collaborative UK satellite launched since the establishment of the UK Space Agency (UKSA, April 1, 2010) and will demonstrate the advanced capabilities of state-of-the-art small satellite technology for scientific and commercial applications. It will also be among the first missions to make use of the ground station facilities that are currently under construction at the UK's new ISIC (International Space Innovation Centre) at Harwell, Oxfordshire.
From the outset, the mission concept has been industry-led — the culmination of several leading British space companies' and universities' efforts to demonstrate the UK's technical lead in space innovation. As the project leader, SSTL will cooperate with the research and commercial partners providing the payloads in building, testing and operating the satellite. 5)
Spacecraft
TechDemoSat-1 has been developed at SSTL under sponsorship of the recently formed UKSA (UK Space Agency) and with contributions from the payload suppliers. It is intended to be the first of a series of UK technology satellites aiming to provide a rapid affordable means of testing and proving the next generation of space hardware in orbit. 6)
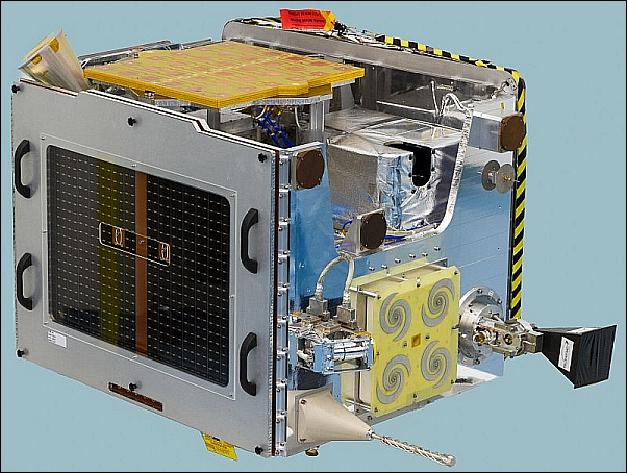
TDS-1 is a satellite platform, derived from heritage technology, which will function as an ‘in-orbit test facility' for innovative UK payloads and software. The minisatellite is based on the SSTL-150 platform with a size of 77 cm x 50 cm x 90 cm. With its 8 payloads, the satellite has a launch mass of ~ 157 kg. It is capable of accommodating around 52 W of on-orbit average power. TDS-1 features 4 wheel slew agility, and a new generation of star trackers, gyros, magnetometers and torque rods.
TDS-1 makes use of the fact that the majority of SSTL satellite platforms carry fully redundant avionics, and this would allow flight testing of new avionics alongside heritage and trusted systems. One "string" is made up of heritage items so that the other "string" can include some new developments. Overall SSTL has also introduced 25 new developments in avionics and payload support systems on the spacecraft in this way. These include a new high speed X-band downlink, and a next generation set of ADCS equipments including gyros and magnetometers.
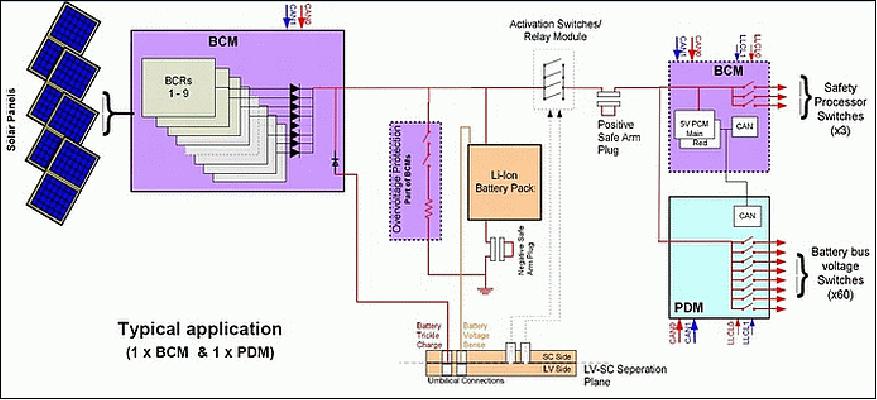
EPS (Electrical Power Subsystem): Electrical power is provided by three body-mounted solar panels installed on three sides of the satellite for a total area of 1.15 m2. Located on the +X, -Z and –X panels, the single-junction Gallium-Arsenide solar cells deliver an average power of 60 W at an efficiency of 19.6%. Peak power on the larger x-solar panels is 110 W while the smaller z-panel delivers up to 55 W. Power is fed to a 15 Ah Li-ion battery using BCRs (Battery Charge Regulators) to manage the state of charge of the battery. Power from the battery is passed to the PCM (Power Conditioning Module) and PDM (Power Distribution Module) that supply an unregulated 28 V power bus and a regulated 5 V bus and distribute/switch power to all satellite subsystems. 7)
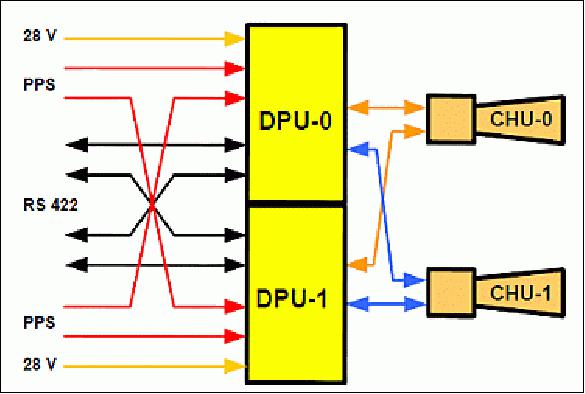
ADCS (Attitude Determination and Control System): The ADCS uses a redundant set of sun sensors and magnetometers for coarse attitude knowledge and new Procyon star tackers for high-precision three-axis orientation knowledge. The Procyon star tracker is for missions requiring cost-effective, medium-resolution attitude determination. Its CHU (Camera Head Unit) has been upgraded from past models to include APS (Active Pixel Sensor) technology, (an image sensor consisting of an integrated circuit containing an array of pixel sensors, each pixel containing a photodetector and an active amplifier) which provides higher resolution data at a low-cost which was trialled on SSTL's UK-DMC2 satellite. In addition to its tracking capability, the Procyon offers excellent rate estimates as well as a ‘lost in space' capability – with no initial attitude determination information, it can be turned on and figure out where it is in the sky.
Flight heritage for the Procyon star tracker also benefits the development of the SSTL Rigel-L star tracker, which provides high-resolution attitude determination, as both employ the same DPU (Data Processing Unit). The Rigel-L is already in use on the Kazakh KazEOSAT-1 mission, and will be used on the DMC-3 constellation of 3 high resolution satellites for DMCii.
The Procyon system can acquire three-axis attitude data within eight seconds from power-on with an accuracy of 5 arcsec on X/Y and 50 arcsec on Z. The star trackers are integrated into the spacecraft data system via a CAN-SU or RS-422 bus. Procyon can recover from a lost in space mode, meaning that the star trackers can deliver attitude solutions without any prior attitude knowledge. The star tracker tolerates angular rates of 2°/s and accelerations of 1°/s2.

Attitude actuation is accomplished by using 100 SP-M reaction wheels. The 100SP-M reaction wheels are 109 mm in diameter and 101mm long with a mass of about 960 gram using integrated electronics that execute commands from the onboard computer. The reaction wheels spin at up to 5000 rpm to deliver an angular momentum of 0.42 Nms and a peak torque of 0.011Nm. Momentum management is provided by magnetic torquers. The wheels require a peak power of 10 W.
OBC (OnBoard Computer): TDS-1 uses an OBC750 onboard computer that is based on a BM PPC750FL processor. The OBC system is in charge of receiving and processing commands from Earth and controlling all satellite subsystems. The system also receives all payload data that is stored and conditioned for downlink by the OBC.
Hot-Gas Xenon Resistojet propulsion system: TDS-1 uses this propulsion system for a total ΔV budget of 36 m/s. The system consists of a Xenon tank and resistojet thrusters that delivers a thrust of 10 to 100 mN operating in blow-down mode with an average impulse of 48 seconds. The 7.4 liter tank can hold up to 12 kg Xenon at a pressure of 70 bar. Propulsion will be used for orbit adjustments and drag make-up maneuvers. Overall, the propulsion system weighs 19.4 kg and is in size 23 cm x 30 cm x 30 cm.
RF communications: TDS-1 has S-band and X-band downlinks capable of operating with experimental downlink speeds up to 400 Mbit/s. Up to 128 GB of payload data can be stored onboard.
The X-band link is SSTL's next generation X-band system operating at 400 Mbit/s. This system makes use of the same antenna pointing mechanism currently operating on NigeriaSat-2, but with the aluminum antenna replaced by a carbon fiber antenna with an additional 3 dBi of gain fed by an improved Tx unit.
Development status:
• The TechDemoSat-1 spacecraft passed its FRR (Flight Readiness Review) in early July 2013.
• The TDS-1 spacecraft passed the PDR (Preliminary Design Review) on April 18, 2011.
Launch
The TechDemoSat-1 spacecraft was launched as a secondary payload on July 8, 2014 (15:58:28 UTC) on a Soyuz-2-1b launch vehicle with Fregat-M upper stage from the Baikonur Cosmodrome, Kazakhstan. SSTL had signed an agreement with Glavkosmos / NPO Lavochkin for the launch of the UK technology demonstration mission. 8) 9) 10) 11) 12) 13)
The primary payload on this flight was the Russian meteorological satellite Meteor-M2 (or Meteor-M N2). The launch of Meteor-M2 was already delayed several times:
The planned mid-December 2013 launch has been delayed again following the latest series of issues with the primary satellite payload. Russia's Meteor-M2 polar-orbiting meteorological satellite has faced delays in the past that have kept the secondary payloads — Norway's AISSat-2, Canada's M3MSat, Britain's TechDemoSat-1 and UKube-1 among them — on the ground. 14)
Orbit of the primary payload: Sun-synchronous near-circular orbit, altitude of ~ 825 km, inclination = 98.8º.
Orbit of the secondary payloads: Sun-synchronous near-circular orbit, altitude of ~ 635 km, inclination = 98.8º. The MKS-PN2 (Relek) was released first of the secondary payloads into an elliptical orbit of 632 km x 824 km.
The secondary payloads on this flight were
• MKA-PN2 (Relek), a microsatellite of Roskosmos, S/C developer NPO Lavochkin on the Karat platform (59 kg, study of energetic particles in the near-Earth space environment (ionosphere) including the Van Allen Belts.
• DX-1 (Dauria Experimental-1), the first privately-built and funded Russian microsatellite (22 kg) of Dauria Aerospace, equipped with an AIS (Automatic Identification System) receiver to monitor the ship traffic. 17)
• TechDemoSat-1 of UKSA/SSTL, UK with a mass of 157 kg
• SkySat-2 of Skybox Imaging Inc. of Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• M3MSat dummy payload of 80 kg.
• AISSat-2, a nanosatellite with a mass of ~7 kg of FFI (Norwegian Defense Research Establishment) Norway, built by UTIAS/SFL, Toronto, Canada.
• UKube-1, a technology demonstration nanosatellite (~3.5 kg) of UKSA/Clyde Space Ltd., UK.
Orbit: Sun-synchronous circular orbit of Meteor-M2, altitude of ~ 825 km, inclination = 98.8º, period = 101.41 minutes, LTAN (Local Time on Ascending Node) at ?? hours.
Orbit of the secondary payloads: Sun-synchronous near-circular orbit, altitude of ~ 635 km, inclination = 98.8º. The MKS-PN2 (Relek) was released first of the secondary payloads into an elliptical orbit of 632 km x 824 km.
Mission Status
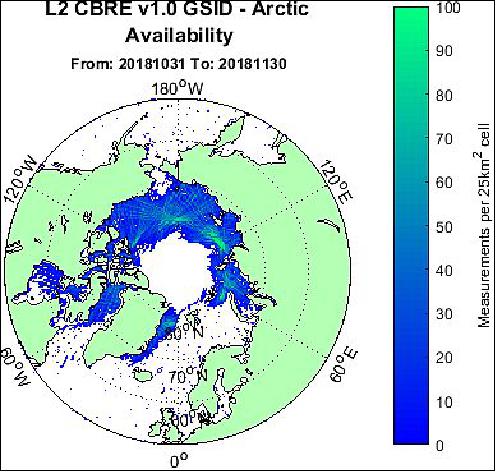
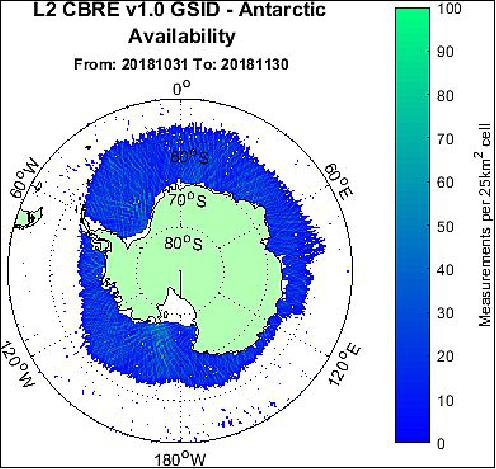
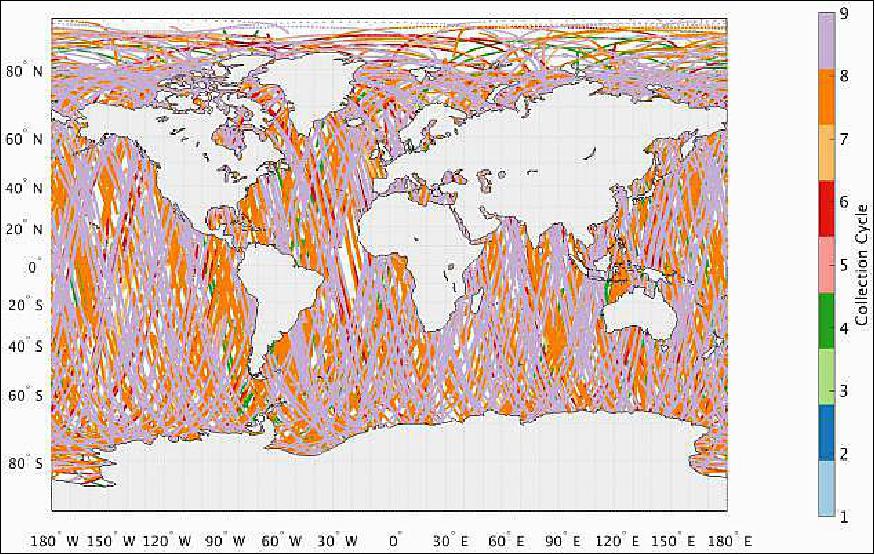
• February 3, 2020: SSTL and partner the National Oceanography Center (NOC) have released new datasets that demonstrate how reflections of satellite navigation signals collected in space can be used to accurately map the extent of the sea ice in the Arctic and Antarctic. 18)
- The measurements were taken by an SSTL small satellite called TechDemoSat-1, launched in 2014, which carried the SGR-ReSI, an instrument designed to demonstrate accurate measurement of ocean wind speeds around the globe using GNSS reflectometry. With funding from ESA, NOC developed the algorithms to estimate the wind speed from GNSS reflections, and recently added the capability to discriminate between ocean and ice. By exploiting the way that GNSS signals are used as radar sources it is believed that the ice edges can be detected with a higher resolution than using passive sensing methods, and this information is potentially valuable for shipping and off-shore energy, as well as climate and polar ice research.
- Images show the sea ice extent during November 2018 over the Arctic and Antarctic (Figures 7 and 8, respectively). The hole over the North Pole shows the high latitude limit of the TechDemoSat-1 satellite's ability to collect GPS satellite reflections. The full set of Sea Ice detection data is available free of charge from data portal www.merrbys.co.uk
- Phil Brownnett, Managing Director of SSTL, said "This is another important demonstration of the benefits of GNSS-Reflectometry for both commercial and scientific communities. SSTL, in collaboration with partners, has taken this new technique from feasibility to a world-leading capability which will see new missions uncovering further applications over ocean, ice and land."
- Giuseppe Foti, Senior Scientist of NOC, said "These recent results show how collaboration between academia and industry is critically important to improve our understanding of ocean and ice processes that have a global impact on our planet."
- The SGR-ReSI instrument from SSTL is flying on the 8-satellite NASA CYGNSS mission launched in 2016 to enable the measurement of hurricanes. The sensor can be carried on a very small satellite and a future constellation could offer low delay, high accuracy ice edge mapping, in addition to the other benefits GNSS reflectometry brings over land, ice and ocean.
- SSTL is working on a number of projects to exploit GNSS reflectometry for different applications and the SSTL HydroGNSS concept for sensing land hydrographic climate variables using GNSS reflectometry has recently been down-selected for the ESA Scout mission opportunity.
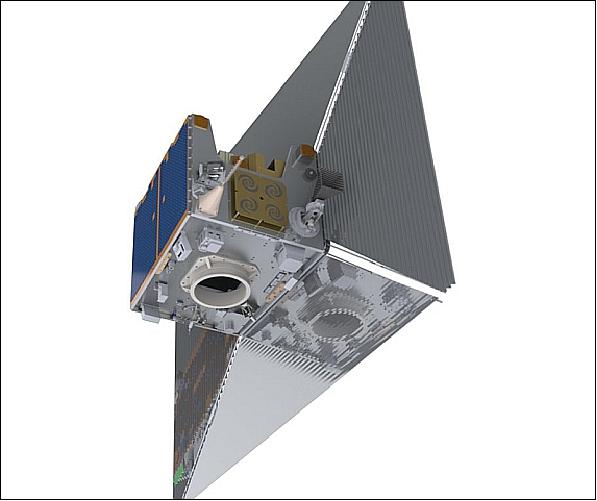
• May 31, 2019: Surrey Satellite Technology Ltd (SSTL) has released an image showing the successful deployment of the de-orbit drag sail on-board TechDemoSat-1. The deployment of the Icarus-1 drag sail, which was supplied by Cranfield University, marks the end of mission operations for SSTL's TechDemoSat-1 small satellite which was launched into a 635 km LEO (Low Earth Orbit) in 2014. 19)
- Sarah Parker, Managing Director of SSTL, said "It is fantastic to see an image of TechDemoSat's deployed drag sail captured by the onboard inspection camera. This in-orbit image of a deployed drag sail on one of our satellites is a first for us and is a fitting culmination of mission operations for this highly innovative small satellite."
- TechDemoSat-1, a 150 kg in-orbit technology demonstration small satellite mission, validated 8 innovative UK spacecraft instruments and software payloads and also acquired ocean wind speed datasets using GNSS reflectometry.
- The deployed sail measures approximately 6.7 m2 and is designed to significantly increase the spacecraft's rate of orbital decay, in compliance with current Space Debris Mitigation best practice and guidelines.
- Stephen Hobbs, Head of Cranfield University's Space Group, commented "At Cranfield we are delighted to see our Icarus de-orbit technology demonstrated successfully in orbit – again. With the Icarus sails now deployed on both TechDemoSat-1 and Carbonite-1, SSTL and Cranfield have demonstrated clear leadership in this technology. We hope to see many more satellites following TechDemoSat-1's example to keep space clear of debris. It's been great to work with SSTL on this mission."
- The Icarus-1 drag sail consists of a thin aluminum frame fitted around one of the external panels of the spacecraft in which four trapezoidal Kapton sails and booms are stowed and restrained by a cord. Deployment is achieved by activating cord-cutter actuators, allowing the stored energy in the spring hinges to unfold the booms and the sail.
- The inspection camera on-board TechDemoSat-1 was manufactured by SSTL's optics experts from COTS (Commercial-Off-The-Shelf) technologies and combines a color CMOS camera with a high performance machine vision lens delivering 1280 x 1024 resolution imagery and a field of view of 65 x 54 degrees. The camera previously captured footage moments after separation from the Fregat upper stage of the Soyuz-2 launcher, as the satellite began its first orbit in space.
• November 14, 2016: New weather datasets, which could prove highly valuable for weather forecasting and for longer term climate monitoring, have just been made available from the Space GNSS Receiver-Remote Sensing Instrument (SGR-ReSI) instrument on board TechDemoSat-1. 20)
- With support from ESA (European Space Agency), SSTL and the NOC (National Oceanography Centre) are continuing to work on the data received from TechDemoSat-1 and have been steadily improving the calibration of the measurements and researching new techniques and applications.
• As of July 8, 2016, the TDS-1 minisatellite is two years on orbit and operating. Its primary payload is the SGR-ReSI (Space GNSS Receiver – Remote Sensing Instrument) to demonstrate its core GPS capability, and to demonstrate the technology and science required for GPS Reflectometry through the operation and collection of data over the ocean. The instrument is principally designed for GNSS-R, using the ground-reflected GNSS signals to remotely sense the Earth's surface. Reflected GPS L1 signals are processed into DDMs (Delay Doppler Maps). The DDMs are downloaded, extracted and processed to synchronize with the satellite's GPS position and other metadata. Surrey's partner, the NOC (National Oceanographic Center) of Southampton UK., provided algorithms that recover the ocean roughness and wind speed (Level 2 data) from the DDMs. 21)
- Although the DDMs are processed on-board the TDS-1 SGR-ReSI in orbit, a significant amount of processing is still required on the ground. A ground processing system has been designed to generate the higher level products from the satellite data. Data levels (Level 0-2) are used, where Level 0 is raw sampled data (only accessible when specifically scheduled to be downloaded), Level 1a comprises DDMs, Level 1b comprises corrected and synchronized DDMs, and Level 2 contains derived geophysical parameters, in particular wind speed. These products are accompanied by copious metadata that includes all parameters needed by users for using or reprocessing the data.
- TDS-1 experiment has certain limitations, not least sharing of the platform and hence intermittent operation for 2 days out of 8. The attitude determination of TDS-1 grows in error when the satellite enters eclipse and loses sun sensors, and this has an impact on the wind retrieval accuracy. The radiometric calibration of the signals is important – either reflected measurements can be referenced to the received noise (where signal to noise ratio cancels system gain), or an absolute signal level can be determined, using switched loads within the Low Noise Amplifiers to provide the reference noise. The RF front-ends can be operated in AGC (Automatic Gain Control) mode or in fixed gain mode; measuring switched load reference noise is only effective when the gain is fixed.
- The rate of data gathering increased as operations were refined, and a large volume of data has been collected. From the period of Sept 2014 to April 2015, a total of 5,740,000 valid Delay Doppler Maps were collected, and in one 48 hours period alone, 630,000 DDMs can be gathered, when acquiring almost 4 DDMs/s.
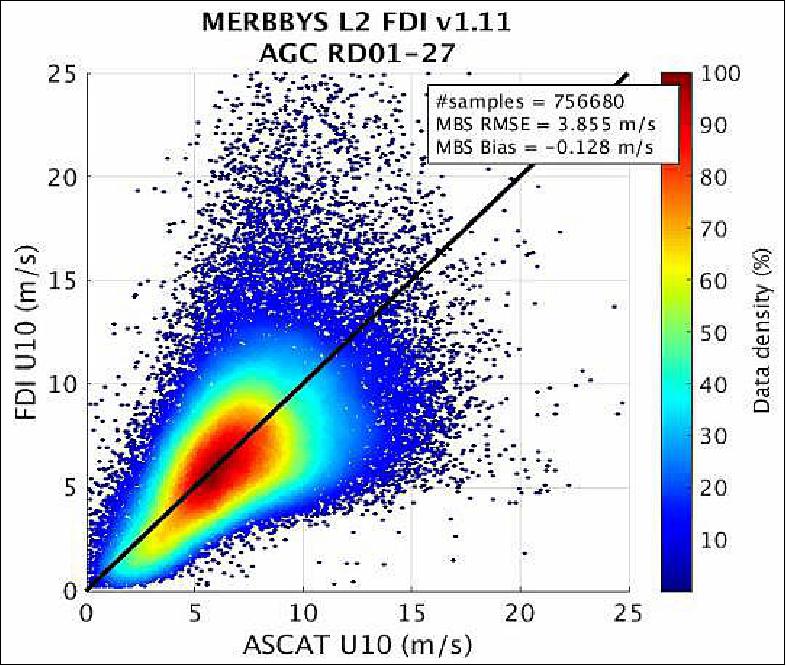
- Ocean Wind Speed and Validation: The NOC (National Oceanographic Centre) developed two wind speed inversion algorithms. The FDI (Fast-Delivery Inversion) algorithm and the more complex BRE (Bistatic Radar Equation) algorithm. The FDI is most appropriate for rapid generation of wind speed from DDMs. Both methods are based upon the peak reflection SNR (Signal to Noise Ratio) measurement, but FDI is more empirically based.
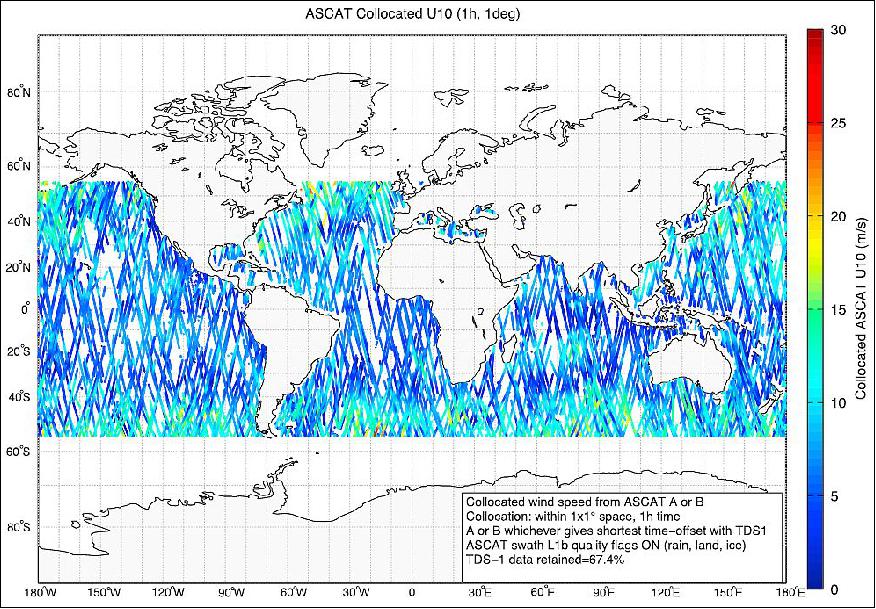
- The NOC-FDI Level 2 algorithm was implemented in the MERRByS(Measurement of Earth Reflected Radio-navigation Signals By Satellite) ground processing system to routinely produce and distribute Level 2 wind speed products to potential end-users. Following successful validation by NOC of the output of the operational ground processor against MetOp ASCAT measurements (Figure 11), Level 2 wind products (Version 1.11) are available on MERRByS for the full period Sept 2014-February 2015. The general performance of the FDI algorithm achieves a bias around 0.2 m/s and a root-mean-square error (RMSE) just below 4 m/s, though further improvements to the performance are anticipated as calibration measures are implemented.
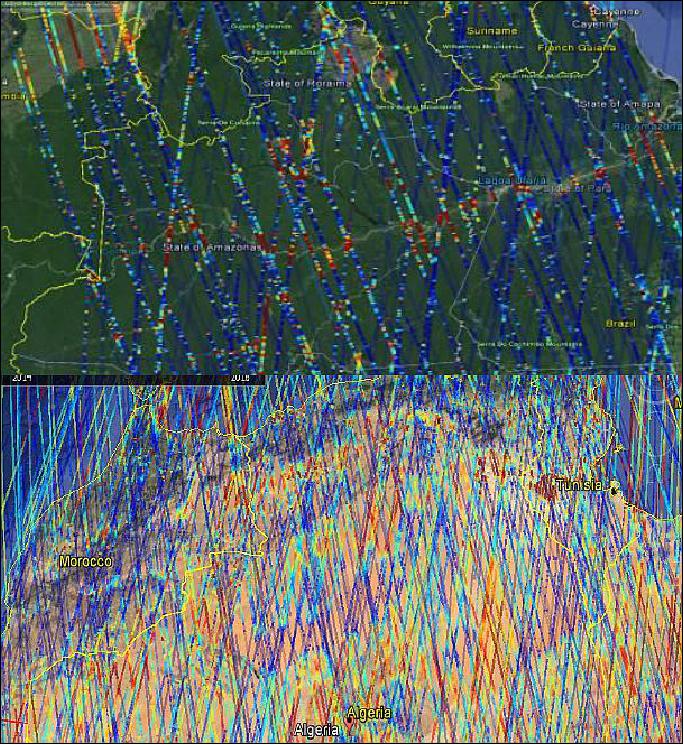
- Collections over land and ice: Two examples of collections of reflections over land are given in Figure 12 from the Amazon basin and North Africa. Rainforests such as in the Amazon are good absorbers of electromagnetic radiation, primarily in the visible spectrum but also at lower frequencies. Mirror-calm surfaces, such as rivers and lakes are likely to give very strong reflections. The contrasts over Africa are perhaps more surprising, as there is less in the way of rain forests and rivers, yet there are strong variations in reflection strength with a clear geophysical imprint visible. Variations may be due to soil moisture, vegetation, surface roughness and surface salinity.
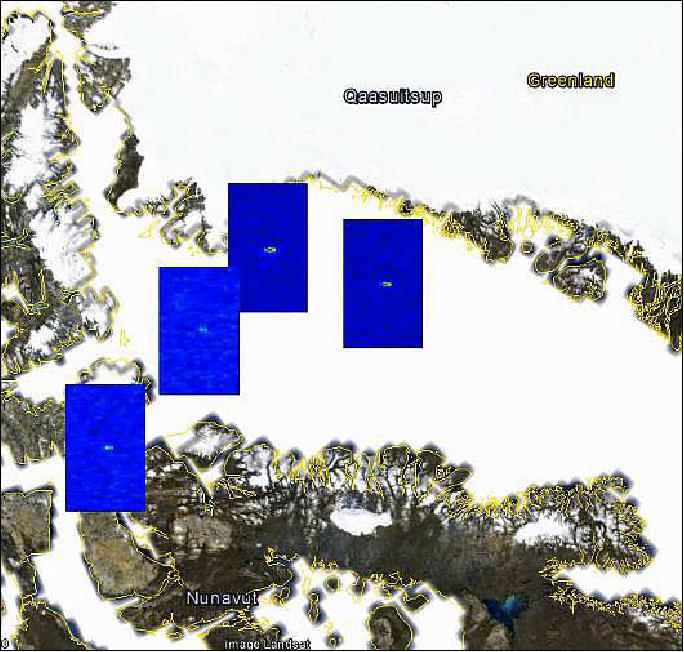
- With regular measurements being taken over polar regions, TDS-1 provides a clear opportunity to develop the cryospheric applications of GNSS-R. For the first time, a large dataset of spaceborne GNSS-R data is available for validation of ice monitoring algorithms. Figure 13 illustrates the potential application for ice sensing. Four simultaneous reflections confirm the presence of ice in the Northwest passage near Greenland. An algorithm has been developed that automatically detects ice edges to contribute towards ice extent knowledge.
- Much of the data from TechDemoSat-1 GNSS-R experiment has been made available at the MERRByS (Measurement of Earth Reflected Radio-navigation Signals By Satellite) website. The data has been released under a Creative Commons Licence that allows free access for non-commercial use.
- Beyond TechDemoSat-1, the SGR-ReSI receiver will be flying (launch in Q4 2016) as the primary payload on the CYGNSS constellation, funded under NASA's Earth Venture 2 program. This eight nanosatellite constellation is primed by the University of Michigan and being constructed by SwRI (Southwest Research Institute). Its target application is to take wind speed measurements within hurricanes, helping to save lives though improvements to forecasting and monitoring. Many of the results and lessons learnt from TDS-1 will help prepare for the CYGNSS mission. The large quantity of data expected will achieve a new level of coverage compared to TDS-1 (Ref. 21).
• March 26, 2016: The ability of spaceborne GNSS (Global Navigation Satellite System) bistatic radar receivers to sense changes in soil moisture is investigated using observations from the low Earth orbiting UK TDS-1 (TechDemoSat-1) satellite. Previous studies using receivers on aircraft or towers have shown that ground-reflected GNSS signals are sensitive to changes in soil moisture, though the ability to sense this variable from space has yet to be quantified. Data from TDS-1 show a 7 dB sensitivity of reflected signals to temporal changes in soil moisture. If the effects of surface roughness and vegetation on the reflected signals can be quantified, spaceborne GNSS bistatic radar receivers could provide soil moisture on relatively small spatial and temporal scales. 22)
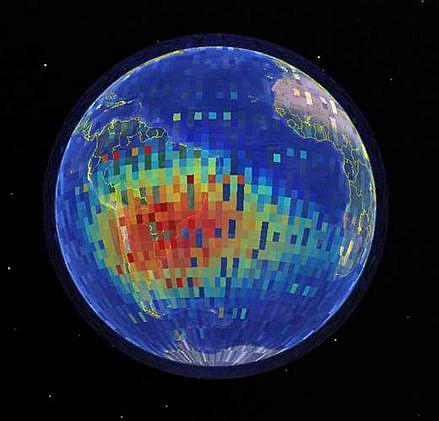
• January 29, 2016: TechDemoSat-1's radiation monitor collects information on total ionizing dose, dose rate, and particle flux (protons and heavy ions). The image shows particle count data overlaid on Google Earth to show the South Atlantic Anomaly where the inner Van Allen belt intersects most closely to the Earth. Radiation monitors flown on Surrey missions allow us to characterize the radiation environment our satellites experience in orbit so that we can qualify commercial-off-the-shelf components for future space missions. 23)
• July 2015: First results are presented for ocean surface wind speed retrieval from reflected GPS signals measured by the LEO (Low Earth Orbit) UK TDS-1 (TechDemoSat-1) satellite. TDS-1 provides the first new spaceborne GNSS-R (Global Navigation Satellite System-Reflectometry) data since the pioneering UK-Disaster Monitoring Mission (UK-DMC) experiment in 2003. Examples of onboard-processed delay-Doppler maps reveal excellent data quality for winds up to 27.9 m/s. Collocated ASCAT (Advanced Scatterometer) winds are used to develop and evaluate a wind speed algorithm based on SNR (Signal-to-Noise Ratio) and the bistatic radar equation. For SNRs greater than 3 dB, wind speed is retrieved without bias and a precision around 2.2 m/s between 3 and 18 m/s even without calibration. Exploiting lower SNR signals, however, requires good knowledge of the antenna beam, platform attitude, and instrument gain setting. 24)
- The TDS-1 satellite is controlled and operated from the ground station with a strict 8 day duty cycle shared between the eight experimental payloads. The ReSI can be accessed and operated for only 2 days in every 8 day cycle. The baseline operation of the ReSI is for continuous acquisition of DDMs (Delay-Doppler Maps) generated onboard at 1 Hz with a coherent integration time of 1 ms. Although integration parameters of the onboard DDM processing are reprogrammable, this capability has not been exploited so far.
- ReSI collects GPS L-band L1 Coarse Acquisition signals using a highly directional downward pointing antenna with a peak gain of 13.3 dBi and a 3 dB half-beamwidth of 15º. The main lobe of the antenna is pointing 6º from the vertical behind the spacecraft. The ReSI is able to track, record, and process reflected signals simultaneously from four separate GPS transmitters (identified by their individual PRN (Pseudo Random Noise) codes). An onboard-ranking computation selects the four best specular reflections based on the closest proximity to the maximum gain of the receiver antenna.
- The ReSI instrument can operate in two reprogrammable receiver gain modes: uAGC (unmonitored Automatic Gain Control) or FGM (Fixed Gain Mode). All ReSI data acquired up to 5 February 2015were obtained in uAGC mode. While there are plans for acquisitions in FGM in the future, for the time being, in the absence of receiver gain data, analyses are limited to uAGC mode signals.
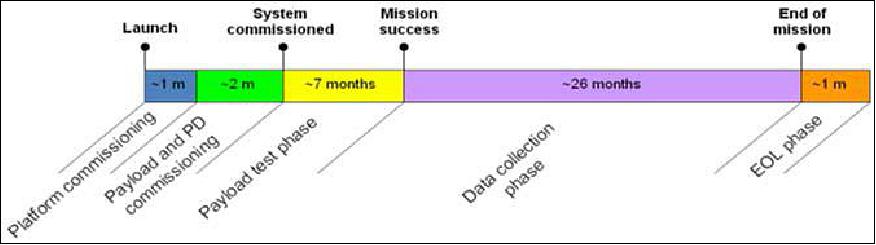
• April 2015: The mission schedule for TDS-1 is shown in Figure 16. Platform commissioning was completed within 3 weeks, and so far the spacecraft has been commissioned, and all payloads have been successfully switched on and checked out apart from the de-orbit sail. Some payloads have delivered initial data sets (Ref. 5).
- Technology demonstration satellites like TechDemoSat-1 provide an opportunity for new technologies and techniques to be demonstrated, tested and qualified, in order for use in future space missions. This reduces risks on the introduction of these on missions on more critical and operational missions. Specifically, TDS-1 will already be reducing risk for the UK NovaSAR and NASA CYGNSS missions.
- TechDemoSat-1 has only just started operations, and has so far seen very successful operations from most payloads. The SGR-ReSI reflectometry in particular has shown very promising results paving the way for GNSS reflectometry becoming a valuable Earth Observation technique. TechDemoSat-2 is already being planned, and SSTL is considering extending the TechDemoSat concept to bilateral programs and as an opportunity for an international mission.
• April 2015: In orbit payload testing of the MuREM payload (Ref. 42).
- In orbit commissioning of the MuREM payload took place in the period August 2014 through to October, and full operations began in November 2014.
- RM (Radiation Monitor) is not counted as a "payload" and its data have not been routinely downloaded to date.
- MuREM, like the other payloads, is operated through the auspices of the UK Space Applications Catapult, based at Harwell, UK, and is allotted a slot in an eight-day cycle of operations – in the case of MuREM, this slot is for operations on two days per cycle.
- Operations are scheduled a week in advance, and payload task requests are handled through an automated process, developed by SciSys.
- Operations have proceeded very smoothly, and payload data is made available to the PI via an FTP site.
- MuREM telemetry and binary file data have been provided via this route, and a small amount of RM data has been made available directly from SSTL.
MuREM Telemetry Analysis:
- Because of the CAN FTP issue, so far only the payload data sent by CAN telemetry can be analyzed. Fortunately, the MuREM and RM dose and dose-rate data are made available via the telemetry stream, independently of CAN FTP, as is the RM particle count summary.
- Figure 17 shows two successive passages through the SAA (97 minutes apart), captured as raw dose-rate-diode voltage data. The larger peak of ~0.6 V corresponds to ~6 x 10-3 cGy(Si) s-1 and the smaller peak ~4 x 10-3 cGy(Si) s-1 – significant dose rates.
- The underlying sinusoidal signal is due to orbit-induced temperature excursions of the payload, cycling between ~30ºC and ~37ºC.

MuREM and RM results:
- MuREM and RM are highly miniaturized radiation environment and effects modules, developed on a rapid time scale (15 months) on a very small budget for the TDS-1 mission.
- Telemetry data indicate both payloads are operating, although an issue with the spacecraft CAN FTP means the detailed particle LET spectra are not currently available.
- Preliminary analysis clearly shows the effects of passages through the SAA.
- The un-detected issue with CAN FTP clearly demonstrates the need to operate the payload on the ground as close as possible to the way the payload is operated on-orbit — despite aggressive design-to-orbit schedules.
- Already RM has been implemented on five other missions and a single board CubeSat version of MuREM is in development (Ref. 42).
• Oct. 24, 2014: Before switch-on for TechDemoSat-1's 8 new technology payloads could take place this week, the team from SSTL has worked hard to commission the spacecraft's systems and some of our new product developments on board. 25)
- With the platform commissioning phase complete, from this week the spacecraft is running on an 8-day cycle designed to ensure that all the payloads receive fair "on-time" and that their own individual requirements for power and data processing are met. The first 6 days of the cycle is operated from the Satellite Applications Catapult using a mission planning system dedicated to operating the 8 external payloads, and then on days 7 and 8, SSTL controls the spacecraft from our Mission Control Centre here in Guildford for basic housekeeping tasks and to run our own product developments.
- On Aug. 13, 2014, the project received 5 "close approach warnings", i.e. a collision alert – for object number #23534, DMSP 5D-2 F13 DEB, which turned out to be part of the USA's DMSP (Defense Meteorological Satellite Program). As a consequence, the project performed a 5 minute firing of the new HCT (Hollow Cathode Thruster) propulsion system to move TechDemoSat-1 out of danger. A week later, the project was called on to perform a second 5 minute firing to again move of the way of a second close approach – this time with TechDemoSat-1's own "little brother", UKube-1, with whom it shared a ride into orbit! 26)
• Sept. 29, 2014: SSTL reports of first successful reflectometry measurements collected by SRG-ReSI (Space GNSS Receiver-Remote Sensing Instrument) from reflected signals of GPS satellites. The reflected signals from the ocean surface were processed onboard and then downlinked to a ground station on the next pass and translated into images called Delay Doppler Maps, from which ocean roughness and wind speed measurements at the sea surface can be interpreted. 27) 28)
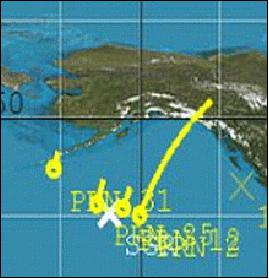
Legend to Figure 18: The position of the TechDemoSat-1 satellite in orbit is marked by the white cross, and the targeted GPS reflections are marked as yellow points.
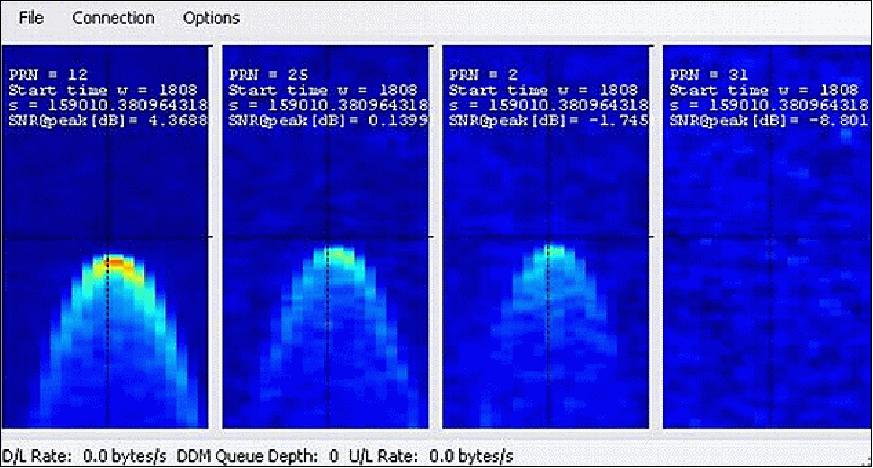
SSTL has been working with the NOC (National Oceanography Centre) in Southampton, UK, who have translated the data from the Delay Doppler Maps (Figure 19) into an interpretation of wind speed measurements at the sea surface, as shown in the diagram of Figure 20.
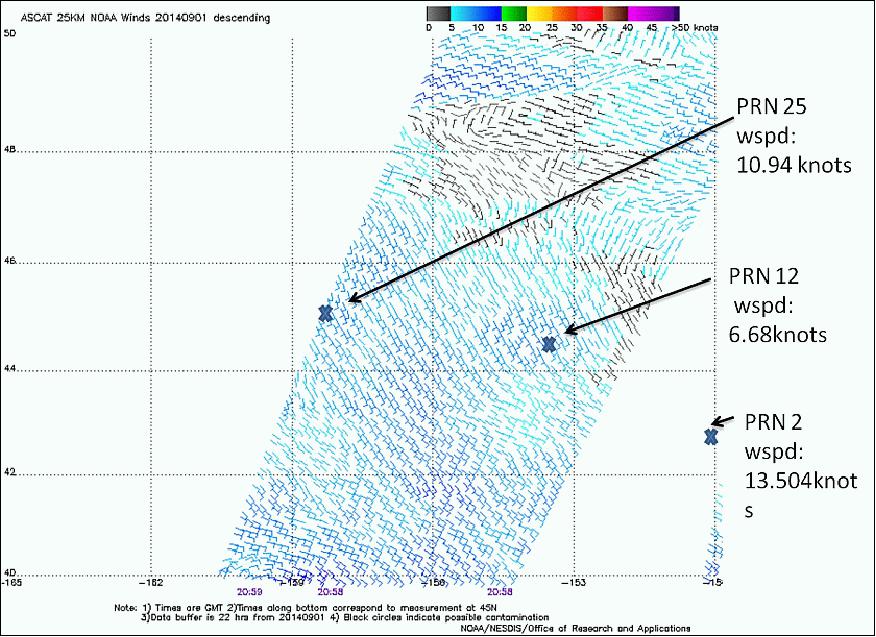
SSTL, with support from ESA (European Space Agency), is now working on preparing the ground processing and web interface that will allow users access to the measurements over the Internet with a short delay.
SSTL is also planning upgrades to the SGR-ReSI instrumentation to allow the tracking of Europe's new GALILEO satellite signals, Russia's GLONASS and China's Beidou satellite signals, yielding additional measurements on the ocean surface. — The future CYGNSS (Cyclone Global Navigation Satellite System), a constellation of 8 microsatellites of NASA (each of 18 kg) to be launched in 2016, will use SSTL's SGR-ReSI to target tropical cyclones and hurricanes.
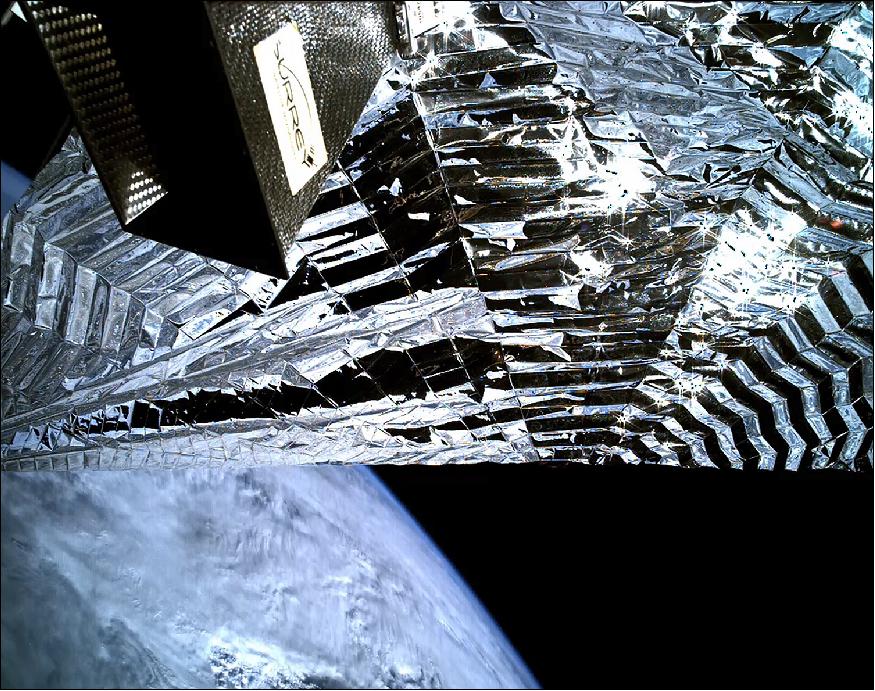
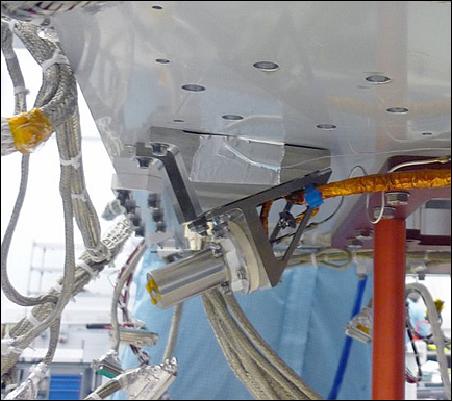
• July 25, 2014: SSTL released an image taken by an inspection camera on board TechDemoSat-1 to mark the completion of the LEOP (Launch and Early Operations Phase) for the satellite, which was launched on 8th July. The image (Figure 21) was taken minutes after separation of the satellite from the Soyuz-2 launcher and shows a view of the Earth from space, with the spacecraft's Antenna Pointing Mechanism in shot. 29)
The inspection camera, which took the image, is mounted on the exterior of the spacecraft, and will monitor the behavior of key mechanical payloads. It was manufactured by SSTL's optics experts from COTS (Commercial-Off-The-Shelf) technologies and combines a color CMOS camera with a high performance machine vision lens. Both the camera and lens were stripped down and ruggedized to survive the vibration and shock loads experienced during launch. The camera system was optimized to give a depth of field capable of delivering an in-focus image of the Antenna Pointing Mechanism and also the Earth in the background.

• Following confirmation of separation from the launch vehicle, the ground station at the SACOC ( Satellite Applications Catapult Operations Centre) at Harwell established contact with TechDemoSat-1 on its first pass and commissioning of the platform has begun, undertaken by the Operations team from SSTL. TechDemoSat-1 is the first satellite to be operated from the new facility at Harwell (Ref. 8).
Sensor Complement
The available payload space on TDS-1 was openly competed for by United Kingdom organizations, with proposals selected based on being able to fund the payload development, and costs for integration into the satellite. Finally, eight payloads were selected for embarking on TDS-1 (Ref. 5).
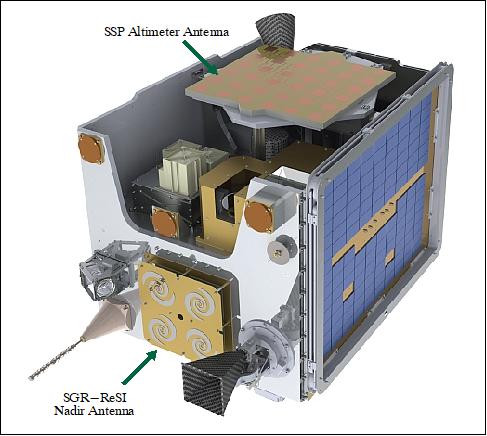
Maritime Suite: SSP (Sea State Payload) • SGR-RESI (Space GNSS Receiver-Remote Sensing Instrument), SSTL • SSP Altimeter, SSTL | |
Space Environment Suite: • MuREM (Miniature Radiation Environment and effects Monitor), SSC (Surrey Space Centre) • ChaPS (Charged Particle Spectrometer), MSSL (Mullard Space Science Laboratory), University College London, UK • HMRM (Highly Miniaturized Radiation Monitor), RAL (Rutherford Appleton Laboratory) • LUCID ( Langton Ultimate Cosmic ray Intensity Detector), Langton Star Centre | |
Air and Land Monitoring Suite: • CMS (Compact Modular Sounder), (Oxford University and RAL | |
Platform Technology Suite: • DOS (De-orbit Sail), Cranfield University • CubeSAT ACS (Attitude determination and Control Subsystem), SSBV • HCT (Hollow Cathode Thruster) demonstration module |
Maritime Suite: SSP (Sea State Payload)
The SSP (Sea State Payload), will test technologies that can measure ocean conditions by GPS reflectometry and by radar altimetry.
SGR-ReSI (Space GNSS Receiver-Remote Sensing Instrument)
The SGR-RESI uses an enhanced GPS receiver with the objective to monitor reflected signals to determine ocean roughness. The instrument is a highly versatile and uniquely capable GNSS receiver that has been designed with the low-cost microsatellite market in mind. Based on COTS parts, the SGR-ReSI builds on the expertise SSTL and SSC (Surrey Space Centre) have developed in the field of GNSS signals, navigation and remote sensing from Low Earth Orbit.30) 31) 32) 33) 34) 35) 36)
Heritage: The UK-DMC small satellite, launched in Sept. 2003, carried already a pioneering experiment, the SGR-10 GPS receiver with 3 RF sections, able to collect samples containing reflected GNSS signals from the ocean surface. This instrument generated data showing the feasibility of GNSS reflectometry as a remote sensing technique, with special application to ocean roughness sensing. The primary limitation of this experiment was the small amount of data that could be collected – only 20 seconds each time. The data was sufficient to demonstrate after post-processing a relationship between reflections and sea state.
The objective of SGR-ReSI is to provide a highly capable yet relatively compact and affordable way of studying the Earth from orbit. The core technology can also be reused for a new family of navigation-grade receivers that will ultimately replace SSTL's heritage SGR receivers which include, amongst others, the SGR-20, SGR-10, SGR-07 & SGR-GEO.
Parameter | UK-DMC GPS experiment | SGR-ReSI Core |
Signals | GPS L1 | 1) GPS & Galileo L1 |
Sampling rate | 5.7 MHz, 1 bit (effective) | 16+ MHz, 2 bits (with Q option) |
Storage | 20 seconds (128 MByte in SSDR) | 60 seconds (1 GByte) |
Measure of power received | SNR only | AGC (Automatic Gain Control) monitoring & on-board source investigation |
Direct tracking | C/A only (commercial IC) | Reprogrammable to other signals |
Reflected tracking | Not practical | Reprogrammable in SRAM FPGA |
Continuous output | No | Yes – Delay Doppler outputs |
To allow for a wide range of possible applications, the prototype SGR-ReSI supports up to 8 separate RF inputs, enabling up to 4 dual frequency antennas. Two varieties of COTS-based RF front-ends have been incorporated, one of which is L1 optimized (MAX2769) while the other is re-configurable to any of the GNSS bands (MAX2112). The RF front-ends are housed on daughter boards with a reasonably generic interface scheme, allowing the adaptation of new front-ends without requirement of a motherboard redesign, and other front-ends are also being considered for the future.
The SGR-ReSI has minimal impact upon spacecraft system design, being compact, low power and with a low data rate output. It is therefore ideally suited for use on flights of opportunity as they arise in SSTL's own missions and for constellations of small, cheap low-cost spacecraft. The SGR-ReSI will be flying as the primary payload on CYGNSS constellation, funded under NASA's Earth Venture 2 program. 37)
Surrey teamed with NOC (National Oceanographic Centre) in Southampton and with other partners, University of Surrey, University of Bath, and Polar Imaging Ltd to develop a new GNSS Reflectometry instrument to collect more data and allow processing on-board using a powerful FPGA. This instrument has been selected for use on the NASA CYGNSS mission that intends to probe inside hurricanes using GNSS reflectometry measurements. The instrument will be flown first on TDS-1 which is a 150 kg mission carrying 8 payloads from different groups across the UK.
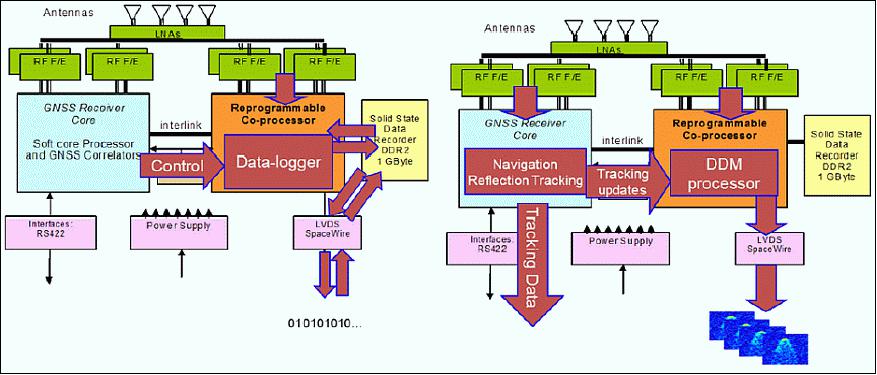
A schematic of the SGR-ReSI is shown in Figure 22. The SGR-ReSI in effect fulfils in one module what might be handled by three separate units on previous spacecraft.
1) It performs all the core functions of a space GNSS receiver, with front-ends supporting up to 8 single or 4 dual frequency antenna ports.
2) It is able to store a quantity of raw sampled data from multiple front-ends or processed data in its 1 GByte solid state data recorder
3) It has a dedicated reprogrammable FPGA co-processor (Virtex 4).
The RF front-ends are connected to the main GNSS processing (processor and correlator) implemented in a Flash-based FPGA. A second FPGA acts as co-processor and is reprogrammable even in orbit. Figure 22 shows the SGR-ReSI's two operating modes – either short bursts of raw (unprocessed) data can be stored in the data recorder, or the co-processor can be used to real-time continuous processing of the raw reflected GNSS data into DDMs (Delay-Doppler Maps) on-board. Furthermore, it has flexibility to be programmed in orbit as required for different purposes, for example to track new GNSS signals, or to apply spectral analysis to received signals.
The receiver supports the GPS L1 frequency band, but also carries reprogrammable front-ends that can be set up at any of the navigation bands. Limitations are imposed by the choice of antennas and LNA filtering. Initially GPS signals are supported, but in future Galileo and GLONASS are expected to be implemented in the VHDL and software.
The instrument is principally designed for GNSS-R, using the ground-reflected GNSS signals to remotely sense the Earth's surface. On TDS-1 there is a high gain (~12 dBi) L1 antenna pointing downwards – which also has the bandwidth to receive L2C signals. Reflected GPS L1 signals are processed into DDMs (Delay Doppler Maps), either or on-board using the coprocessor, or alternatively on the ground if the raw data is downloaded.
In raw data mode, the sampled data from the RF front-ends is stored into the on-board solid state data recorder prior to download via the LVDS port; 1-4 minutes of data (depending on the number of RF channels sampled) can be stored before the 1 GByte data-recorder is full. In the second mode, algorithms in the co-processor process the raw data into DDMs which are at a low enough data rate to permit continuous streaming of data.
The inversion models and methods are still immature, and there is a need for the collection of more data, both raw and sampled to allow further refinement of inversion techniques. TDS-1 presents an important opportunity, and care will be needed to ensure that suitable validation data are obtained from other sources of data.
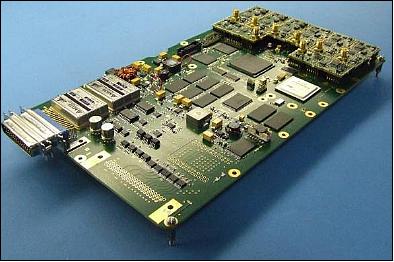
The SGR-ReSI supports multiple interfaces (CAN, RS422, SpaceWire) so it could be accommodated by a variety of different satellite missions. The unit is around 1.5 kg in mass, consumes approximately 10 W, and fits within half of an SSTL standard satellite micro-tray (approx 300 x 160 x 30 mm). It doubles as a platform GNSS receiver, and could potentially be flown on multiple satellites to increase coverage, without major cost. A data service is planned that is able to take measurements from satellites such as TDS-1, rapidly collect and invert the data into sea state, and pass onto commercial / institutional users of such information.
At its heart, the SGR-ReSI is a highly versatile GNSS navigation receiver. The receiver core is a 24-channel L1 receiver with support for up to 4 antennas. The SSTL developed GNSS correlators are implemented alongside a LEON3 softcore processor in an Actel ProASIC3E FPGA (Field Programmable Gate Array). The Actel ProASIC3E is a non-volatile flash-based FPGA that consumes little power, providing a low-power. It contains the processor and 24 channels of SSTL-developed correlators, plus other peripherals, such as UART, CAN-bus, and SPI (Serial Peripheral Interface). The RTEMS (Real-Time Executive for Multiprocessor System) operating system has been selected to allow control over multitasking application software, portability between different processors, and compatibility with other developments at SSTL.
While the first FPGA contains the core functions of a GNSS receiver, a second FPGA is available as a co-processor. This is a Xilinx Virtex 4 FPGA that is SRAM based, allowing the upload of new co-processing algorithms even while in orbit. It enables special processing algorithms for reflected or occulted signals, allowing the equivalent of hundreds of correlators to map the distorted signals. To allow the storage of both sampled and processed data, a bank of DDR2 SDRAM (Double Data Rate Synchronous Dynamic Random Access Memory) devices with a capacity of 1 GByte is used.
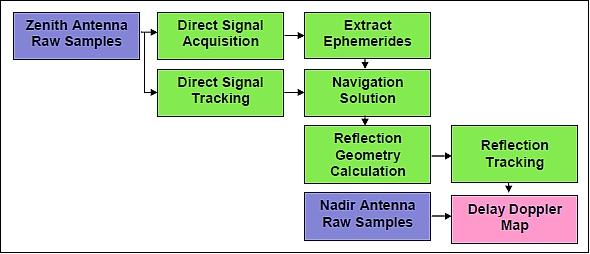
For the co-processor to generate Delay Doppler Maps of the sampled reflected data, it needs to be primed with the PRN, the estimated delay and the estimated Doppler of the reflection as seen from the satellite. These are calculated by the processor in conjunction with the main navigation solution - the data flow for this is shown in Figure 24. Direct signals (from the zenith antenna) are used to acquire, track GNSS signals. From the broadcast Ephemerides, the GNSS satellite positions are known. Then from the geometry of the position of the user and the satellites, the reflectometry geometry can be calculated, and hence an estimate of the delay and Doppler of the reflection.
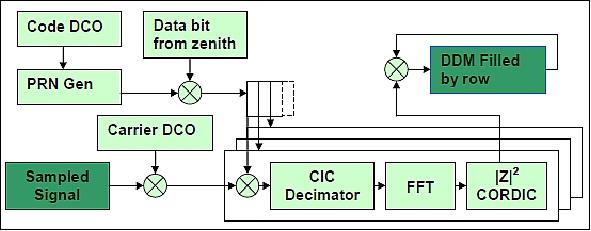
The processing of the Delay Doppler Map is performed on the coprocessor using data directly sampled from the nadir antenna (Figure 25). In common with a standard GNSS receiver, the local PRN is generated onboard the co-processor. As an alternative to synchronizing and decoding the reflected signal in a standalone manner, the direct signals can be used to feed the navigation data sense, and assist the synchronization. The sampled data is multiplied by a replica carrier and fed into a matrix that performs an FFT on a row by row basis of the Delay Doppler Map, to achieve in effect a 7000 channel correlator, integrating over 1 millisecond. Each point is then accumulated incoherently over hundreds of milliseconds to bring the weak signals out of the noise.
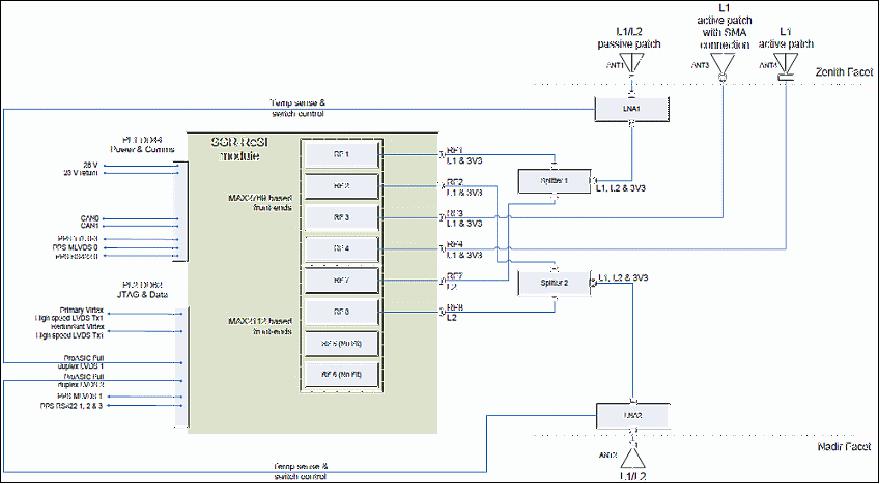
SGR-ReSI antennas: Although the SGR-ReSI can in principle support up to 4 dual frequency antennas, a reduced subset is being flown on TechDemoSat-1 to support its planned applications. A left hand circularly polarized dual frequency L1/L2 fixed phased array antenna (gain 13 dBiC) sits on the earth facing facet for GNSS reflectometry (Figure 1). It is the opposite polarization to conventional GNSS antennas and provides the higher gain required to receive the weak signals from GNSS reflections. A dual-frequency L1/L2 antenna and two additional L1 antennas will occupy the space facing facet with more typical RHCP and hemispherical patterns. These antennas are intended to provide navigation function for the satellite and also support monitoring of radio occultation events with both the L1 and L2 signals. The provision of three antennas on the space facing facet with suitable baselines between them also enables the SGR-ReSI to support GNSS based attitude determination as previously demonstrated by SSTL on the UoSAT-12 and TopSat satellites.
A new low noise amplifier has been designed that supports both L1 and L2 frequencies, is equipped with a temperature sensor, and a switched load to provide a known noise level when enabled for calibration purposes. One each will be used on the nadir and zenith dual frequency antennas respectively. The two L1-only zenith antennas will use the heritage integrated L1 LNAs (Low Noise Amplifiers) used with previous single frequency GNSS receivers.

SSP (Sea State Payload) Altimeter
Active measurements will be made by an experimental radar altimeter based on one phase center of the NovaSAR-S payload frontend. The altimeter is being built by SSTL/Astrium to: 38)
• Provide flight heritage for SAR hardware
• Demonstrate altimeter functionality
• Provide a stepping stone to a low cost altimeter instrument
• Measure background noise and spurious signals at S-band.
The SSP altimeter is an experimental instrument that will demonstrate altimeter functionality and measurements rather than full operational performance. It will also provide an early flight opportunity for the RF equipments of the NovaSAR-S payload. By leveraging the SAR development the altimeter design is simplified and a working system, although far from optimal, can be realized within the challenging TDS-1 schedule. 39)
By utilizing components from Astrium's SAR (Synthetic Aperture Radar) to operate as a coarse altimeter, the SSP pulses radio waves onto the ocean. The echo waveforms that return give an independent measurement of the sea state and the information gathered can then be applied to meteorology, oceanography, climate science and ice monitoring. Astrium Portsmouth will also contribute an antenna design using the same technology as the SAR antenna but on a smaller scale. 40)
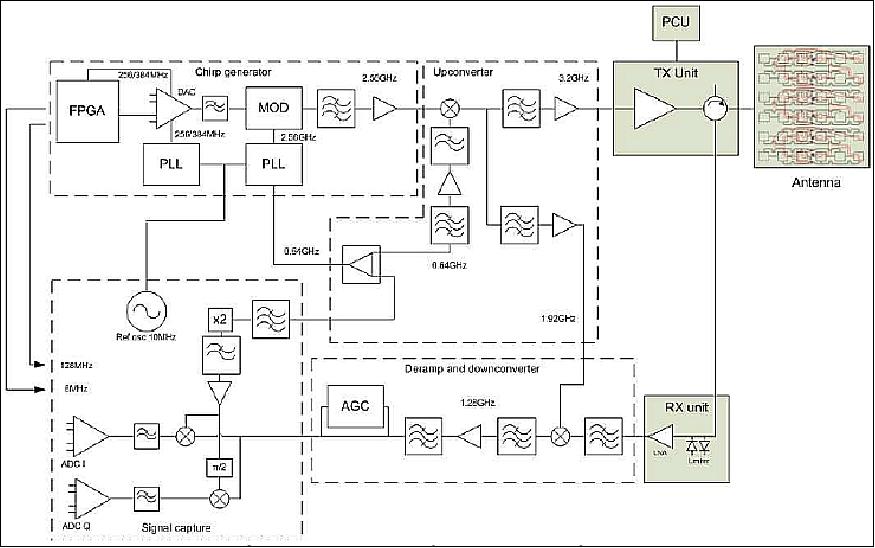
The PFM altimeter will be implemented using the PCU (Power Conditioning Unit), transmit and receive units built to near flight standard for the SAR payload ground demonstrator. An antenna will be built based on the SAR radiator unit but with a square rather than rectangular array of patches. The transit unit will be one of the first GaN amplifiers in orbit.
The altimeter design has been kept deliberately simple to minimize NRE. It transmits chirp modulated pulses and records the deramped echoes without any tracking or onboard processing. Collected data will be processed offline on the ground. The priority will be demonstrating measurement of SWH (Significant Wave Height). However, relative SSH (Sea Surface Height) and wind speed will also be possible. Absolute SSH measurements of limited accuracy will be possible if good orbit knowledge is available from the on board AOCS system, but this is not a priority. It will also be possible to configure the altimeter as a receiver to take measurements of background noise and characterize the in orbit spectrum at the S-band allocated frequencies.
Space Environment Suite (MuREM, ChaPS, HMRM, LUCID)
MuREM (Micro Radiation Environment Monitor)
MuREM (or µREM) is designed to provide in-fight data on TID (Total Ionizing Dose), dose rate and the charge deposition spectra of SEE (Single Event Effect) initiating energetic protons and heavy ions, as well as providing radiation effects data on samples of advanced COTS (Commercial-off-the-Shelf) electronic devices. Its low mass (< 1 kg) and low power make it suitable in whole or part as a generic radiation environment monitor for routine fight on micro- or nanosatellites. 41)
The monitor consists of three main boards sized to the PC104 standard to make the board layout consistent with a CubeSat layout, for possible future re-flight. The unit as configured for TDS-1 uses a 10 cm x 10 cm x 4.5 cm housing with mounting feet and has a mass of 0.5 kg.
MuREM makes use of RADFET (Radiation-sensitive Field Effect Transistor) solid-state dosimeters, a dose rate sensitive photodiode and has two large area PIN diodes – one to measure proton flux and one to measure heavy ion flux and LET (Linear Energy Transfer). The payload additionally carries a radiation effects board used to gather collateral data on devices exposed to the true environment found in space.
Each RADFET dosimeter consists of a pair of MOSFETs with a large gate oxide layer, increasing their response to TID, which is detected bay measuring the change to the gate threshold voltage. In measurement mode, one of the pair is held biased, whilst the other is held unbiased. In read mode, a fixed small current or approximately 10 µA is passed through the MOSFET channel via the source and drain electrodes, and the required gate voltage is measured. The change in gate voltage varies linearly with accumulated dose and the rate of change of voltage with dose is bias dependent (more change for the biased FET). Unfortunately, the gate voltage is also strongly affected by temperature; however, by measuring the change in the biased and unbiased FET, the common temperature effect can be removed, leaving the dose-dependent change. A nearby temperature sensor provides supplementary temperature data, which can be used in case of failure of this detection methodology and the requirement to calibrate for dose.
One of the RADFET dosimeters on MuREM will have a thin Cu foil of 50 µm, and the other a Al shielding equivalent 165 µm to investigate the effects of using high-Z materials in spacecraft shielding. The output from the RADFET circuit feeds into the 10 bit C515C ADC (Analog Digital Converter). In order to provide high resolution data, an adjustable offset is applied to the circuit via a potentiometer voltage divider to maintain a voltage range compatible with the ADC.
The dark current of the photodiode used in the MuREM is due both to thermal and ionizing radiation effects. The photodiode has a linear thermal response, and so calibrating this out of the dark current is straightforward. The remaining dark current signal is then solely due to ionizing particles depositing energy into the detector and so monitoring this current provides a measure of the dose rate environment. This method was used on the CEDEX payload, flown on GIOVE-A with great success, and provided real time information on the ionizing dose rate.
The particle detectors consist of large area, 300 µm thick PIN diodes whose outputs are run through CR-RC pulse shapers. A peak hold circuit allows the peak of the resulting pulse to be read into the 10 bit C515C ADC accurately, providing a high confidence result. A 3 cm x 3 cm diode is used for detecting heavy ions and a 1 cm x 1 cm diode is used for protons, owing to their relative fluxes. Particles travelling through the diodes will deposit energy dependent on their species and kinetic energy. Each particle event is logged in 16 logarithmically spaced energy deposition channels covering a LET range of approximately 0.1 to 10 MeV cm2 mg-1 for the heavy ions. The proton detector has a different energy deposition threshold and range and is designed to detect protons with energies > 30 MeV, dependent on spacecraft shielding. Each detector chain is capable of measuring up to 50,000 events per second.
MuREM operates on a +5V regulated power bus, with internal +1.5V, +3.3V,-5V, ±10V and +20V lines generated internally. Outputs from all sensors are input into the 10 bit ADC of two internal C515C CAN controller devices. Two CAN bus addresses are used, with data from the particle detectors and radiation effects board delivered via CAN file-transfer protocol (FTP), with RADFET and dose rate diode data delivered as telemetry. The unit interfaces with the spacecraft via a single DA-26M connector containing all data and power links.
RM (Radiation Monitor): 42)
The RM is an additional miniaturized cut-down version of MuREM, which was developed by SSC and SSTL for use as a standard bus subsystem radiation monitor for SSTL.
- SSTL RM consists of four credit card sized boards (95 mm x 55 mm) for power conditioning, dosimetry, dose-rate monitoring, CAN data bus control, and proton/ion LET spectroscopy.
- The unit has a 10 x 6 x 6 cm housing and has a mass of ~400 g.
- It runs off a single unregulated 28 V supply and provides data communications and telemetry via a CAN (Controller-Area Network ) bus.
- The power consumption is ~1.4 W.
- It can also be configured to run on a +5 V regulated power line and can make use of RS-232 data links.
- An updated version is commercially available through SSTL.
ChaPS (Charged Particle Spectrometer)
The objective of ChaPS is to demonstrate a novel payload design that combines the capabilities of multiple analyzers by using four miniaturized sensors to perform simultaneous electron-ion detection. Each of the sensors is optimized to carry out electrostatic analysis of the different space plasma populations expected in LEO (Low Earth Orbit). 43) 44)
The prototype ChaPS instrument is provided by UCL/MSSL (University College London/Mullard Space Science Laboratory). It is the first prototype of a new class of compact instruments to detect electrons and ions, building on 40 years of experience at UCL/MSSL.
Particles detected | Electrons and ions |
K-factor | ~8 |
Geometric factor | ~1 x 10-4 cm2 sr |
Energy resolution | ~0.22 |
Energy acceptance | Few eV to 20 keV |
Angular resolution | ~17º x 21º |
Angular acceptance | ~17º x 360º |
Detector mass | Analyzer head: ~ 10 g; Estimated total < 300 g |
Power | 0.4-0.4 W |
ChaPS has a form factor of a 1U CubeSat. The instrument will demonstrate the principles on-orbit and open the way to use the techniques on other missions where mass and power are at a premium, for example space weather constellations. ChaPS will operate in three modes, to measure electrons in the auroral regions, electrons and ions in other regions and also to measure the spacecraft potential.
ChaPS is extremely attractive because it saves mass, power and volume - and ultimately mission cost-while providing an enabling technology for future space missions such as ESA's proposed JUICE (Jupiter ICy moon Explorer) mission to Jupiter. Its low cost also opens up new applications for such instrumentation that were simply not feasible in the past.
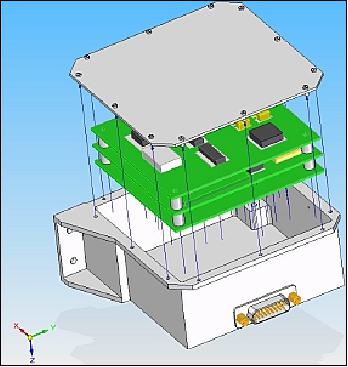
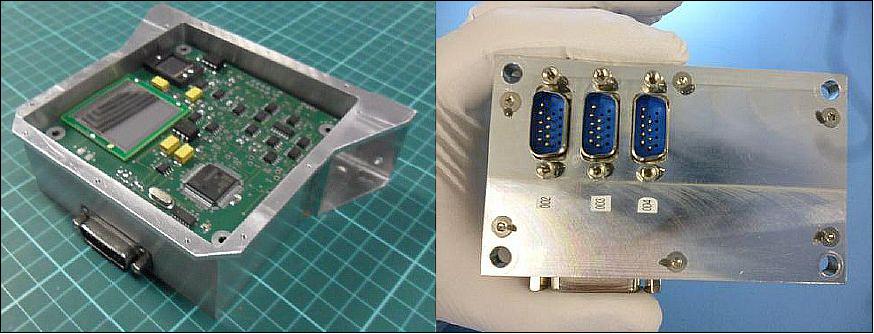
HMRM (Highly Miniaturized Radiation Monitor)
The HMRM instrument is provided by RAL (Rutherford Appleton Laboratory) and ICL (Imperial College London). It is a lightweight, ultra compact radiation monitor designed to measure total radiation dose, particle flux rate and identify particle species (electrons, protons and ions). The instrument is designed to provide housekeeping data on the radiation environment to spacecraft operators to correlate the performance of spacecraft subsystems, raise alerts during periods of enhanced radiation flux and to assist in diagnosing spacecraft system malfunctions. 46) 47) 48)
The goal of the HMRM program is to develop a "chip sized" prototype radiation monitor suitable for application in:
- Coarse radiation housekeeping
- Alert and saving function
- Support to platform and payload systems
- The mass of HMRM device shall be less than 20 g
- The radiation detector single chip shall have a radiation TID tolerance of at least 100 kRad
- The radiation detector single chip shall be latch up free
- The sensor shall be capable of meeting the performance requirements under full solar illumination at an orbital radius of 1 AU.
Characteristic | Specification | |
Sensing element | 50 x 50 array of 20 mm x 20 mm , 4T APS detectors | |
Configuration | Either single chip, or integrated monitor | |
Mass | Integrated monitor: 52g (including fasteners and connector) in a stack configuration | Single Chip: 0.8 g |
Power | 1-2 W (TBC) depending of number of detectors in stack and architecture of power supply | Single Chip: < 200 mW per ASIC |
Volume | Integrated monitor: 20 x 25 x 30 mm - 15 cc | Single chip (unpackaged): 2.54 x 10 x 0.6 mm |
Radiation measurements | Integrated Monitor: | Single Chip: |
Maximum flux | 108 #/cm2/s | |
Auxiliary measurement | Temperature | |
Interface | Integrated Monitor: | Single Chip: |
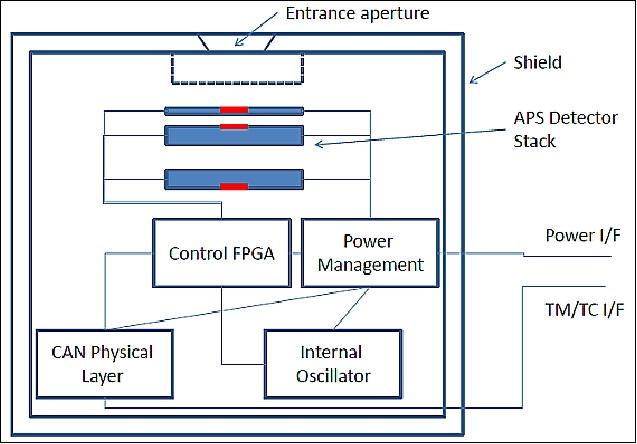

A CMOS sensor for the HMRM was selected with the following main specifications: 49)
• 0.18 µm CMOS image sensor technology
• 20 µm 4T-pixels in a 50 x 51 array
• Snapshot and correlated double sampling (CDS)
• Frame rate up to 10,000 fps
• Column-parallel 3-bit single-ramp ADC, with in-column trimming
• Digital readout, plus analog readout for debugging
• Integrated DAC for voltage/current generation
• Band gap
• Temperature sensor.
LUCID (Langton Ultimate Cosmic ray Intensity Detector)
The LUCID instrument is provided by the Langston Star Centre (i.e., the Simon Langton Grammar School for Boys, in Canterbury, England). LUCID is the winning entry of a U.K. space competition. The LUCID device allows the characterization of energy, type, intensity and directionality of high energy particles. 50)
The device makes use of COTS sensor technology developed at CERN (The European Organization for Nuclear Research) using Timepix chips from the Medipix Collaboration. Part of a family of photon counting pixel detectors, Timepix allows for recording time information regarding when events occur relative to when the shutter opens.
The data obtained from LUCID is of interest to NASA in terms of radiation monitoring but also provides inspiration to the next generation of physicists and engineers by giving school students the opportunity to work alongside research scientists and take part in authentic research. 51)

The LUCID experiment is part of a wider project called CERN@school, a program that aims to bring the excitement of CERN into the classroom, and encourage the future generation of scientists. CERN@school covers the effort to get individual Timepix chips into schools for educational and research purposes. We've started a number of different activities, the most recent of which is Radiation Around You (RAY), a project to build up a radiation map of South East England. We're into the final of the Rolls-Royce Science Prize with the RAY pilot program.
Air and Land Monitoring Suite
CMS (Compact Modular Sounder)
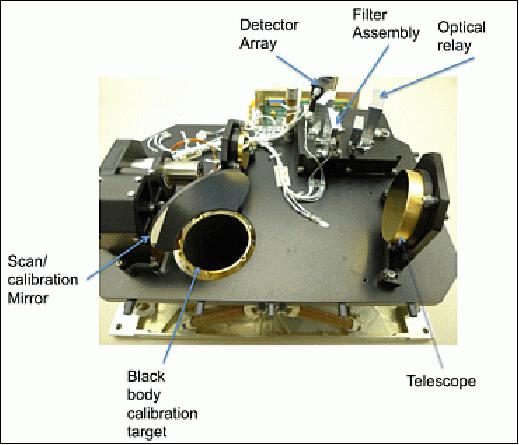
The CMS instrument is being provided by Oxford University's Planetary Group and RAL (Rutherford Appleton Laboratory). The CMS is a modular infrared remote sensing radiometer unit, designed to easily mix and match subsystems and fly multiple versions on multiple platforms at low cost by tailoring it to specific customer requirements once flight heritage has been proven.
- The CDHU (Command and Data Handling Unit), supplied by RAL, consists of an ARM processor and Actel FPGA, which performs real time spatial and temporal averaging of data.
- In standard operation mode the instrument views sequentially the nadir mapping view, space and a calibration target.
- During payload tests limb viewing and different integration times can be substituted.
• Mechanical:
- Base dimensions 380 mm x 315 mm x 186 mm
- 6 x M5 fixings to the top of the payload panel
- Mounted such that the unit has a FoV for Earth, space, and limb
- Mass of 4 kg
• Electrical:
- 26 W male high density D-type (data)
- 25 W male standard D-type (power & CAN)
- Connected to 2 +28 V low power battery switches (electronics and payload heater)
- 4 Mbit/s synchronous serial data link
- Interfaced to HSDR and FMMU via separate LVDS chips for redundancy
• Command & control:
- Primary and redundant CAN architecture.
Platform Technology Suite
CubeSat ADCS
This experiment is the realization of the stellar gyroscope concept on a CubeSat ADCS (Attitude Determination and Control Subsystem), designed and developed by SSBV SGS (Space & Ground Systems), Portsmouth, Hampshire, UK. The stellar gyroscope can be used to measure attitude changes from a known initial condition without drift while sufficient stars are common across frames, because absolute attitude changes are measured and not angular rates. 54) 55)
To maintain a high quality attitude estimate in eclipse, two current alternatives are employed.
• A star tracker/mapper can be used to identify star constellations and retrieve absolute attitude. However, star trackers add cost and complexity requiring a star database, high update rates, and consequently high quality optics, sensors and a baffle.
• The second method is to use an Earth horizon sensor. For the sensor to work in eclipse, the infrared spectrum corresponding to the H2O absorption bands is used. This typically requires a specialized IR sensor, a detector cooling system, or a chopping or rotation mechanism to generate differential readings of the Earth and space temperatures. Such a system requires significant power and the mechanical systems have reliability concerns.
The alternative, used in this design, is to use a stellar gyroscope, as a relative attitude sensor, to reset the drift from the rate gyroscope propagation in eclipse. The stellar gyroscope can be realized using low cost sensor and optics, where the algorithms can tolerate a large amount of noise, and does not require a star database.
The stellar gyroscope can be used to propagate a spacecraft's attitude from a known initial condition without drift. Normally, in the absence of an absolute attitude measurement, attitude is propagated by integrating gyroscope angular rate data (typically MEMS based for small satellites). This results in a drift in the attitude estimate, which is essentially a loss of attitude knowledge after a sufficient amount of time. The image based approach can propagate attitude without drift while sufficient stars are common across frames. As the camera pans the sky, after sufficient time all the stars may leave the frame. In that case, some error accumulates as rotation estimates are stacked. However, this happens over a significantly longer period of time compared to a MEMS rate integrator. The image-based rotation estimates can complement a set of MEMS rate gyroscopes to maintain a high accuracy attitude estimate at low angular rates (where MEMS gyroscope drift is most severe).
For the stellar gyroscope, the star correspondence problem across frames is challenging due to spurious false-star detections (false-positives) and missed stars (false-negatives). Correspondence of stars across frames can be done with limited success by proximity for small angular changes, where for short time intervals, the stars are assumed to not have moved much. However, for large attitude changes, the star association algorithm between frames must overcome false stars, missed stars, stars leaving the field of view and new stars entering the field of view. The problem is essentially to fit a mathematical model over data with a large number of outliers, for which the RANSAC (Random Sample Consensus) approach is effective. RANSAC is a popular algorithm in machine vision and stereo vision, and has been proposed for satellite based image registration for geographic applications. 56)
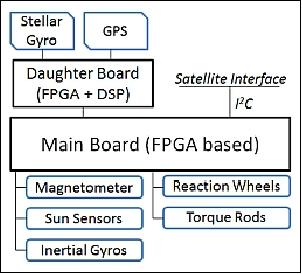
CubeSat ADCS: The attitude determination and control subsystem is designed for CubeSats on a standard PC104 board. In its basic configuration, it integrates a high sensitivity magnetometer, up to 6 sun sensors, 3 axis MEMS gyroscopes, and 3 magnetic torque rods as a 3-axis magnetic attitude control system. In its full configuration for improved attitude knowledge and pointing accuracy, a GPS receiver, a stellar gyroscope and an ADCS control computer are added on a daughter board, still within the PC104 height constraints. A momentum wheel or three reaction wheels can be added from a third party supplier.
The stellar gyroscope complements the MEMS rate gyroscopes in eclipse to maintain an accurate estimate of attitude. However, in order to benefit from accurate propagation in eclipse, accurate knowledge in sunlight is necessary. The system utilizes sun sensors accurate within 0.5º developed by SSBV, as well as a high-accuracy magnetometer that produces magnetic field vector measurements to around 1º of accuracy in combination with an IGRF magnetic model and good knowledge of the position in orbit, which is provided by the GPS receiver. This combination results in a high quality estimate of attitude in sunlight.
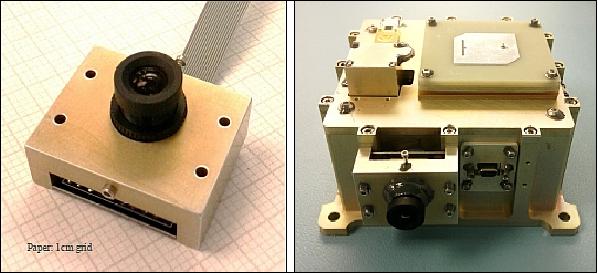
The stellar gyroscope on this ADCS system consists of a low-cost camera assembly and processing hardware and is designed to require little mass and volume. The camera is based on the OmniVision OV7725 VGA CMOS sensor and a miniature S-mount lens with a focal length of 6 mm. This configuration results in a 27.6º x 36.7º FOV. Table 6 summarizes the camera specifications. As it is only to be used in eclipse in this application it is not required to operate in sun light and does not need a baffle.
The camera is designed to register stars of magnitude 4 and brighter. With the selected optics, FOV, and an exposure time of 800 ms, at least 4 stars are visible in 97% of the sky, and at least 3 stars are visible in 99% of the sky.
Detector | OmniVision OV7725 CMOS VGA Sensor (640 x 480 pixels) |
Optics | 6 mm focal length, aperture f/2.0 |
FOV (Field of View) | 27.6º x 36.7º |
Sensitivity | 3.8 V/(Lux · s) |
SNR (Signal-to-Noise Ratio) | 50 dB |
Dark current | 40 mV/s |
Pixel size | 6 µm x 6 µm |
Figure 37 shows the camera system and ADCS system as designed for the technology demonstration experiment on TechDemoSat-1. The experiment will take sample images and log other sensor data to tune and validate the attitude determination algorithms.
In future developments, in order to tolerate higher slew rates and improve image quality, SSBN will replace the optics to be able to significantly reduce the exposure time by increasing the aperture. Preliminary analysis shows that slew rates up to 3º/s are feasible with the improved configuration. At higher slew rates, the system uses the MEMS rate gyroscopes as they become more reliable.
DOS (De-Orbit Sail)
DOS, developed at Cranfield University, is intended to demonstrate a novel means for de-orbiting a satellite at the end of its mission lifetime through deploying a sail to increase the aerodynamic drag.
The de-orbit sail is the product of several years of Cranfield University's work on sustainable approaches to space exploration. SSTL's TechDemoSat-1 gave the Cranfield team the unique opportunity to take-on the challenge of evolving their ideas from designs on paper, to flight-ready hardware. Maintaining a low mass is always a challenge with space projects; the TechDemoSat-1 de-orbit sail is made from a material called Kapton, which is just 25 µm thick. 57)
The sail will be deployed when TechDemoSat-1 issues a command at the end of its mission. This command will trigger cable cutters to be fired, which will release a restraining belt, and the sail will then be deployed by stored spring energy. Cranfield's payload will then take up to 25 years to safely guide the TechDemoSat-1 spacecraft into the Earth's atmosphere to disintegrate.
Exactly how long Cranfield's de-orbit sail will take to complete the satellite's course back into our atmosphere will be a subject of great importance to those interested in the management of space debris and the continued exploration and utilization of space. This process will be affected by a range of things including the amount of solar activity that it is being exposed to, and what altitude the satellite is at when the sail is deployed.
HCT (Hollow Cathode Thruster) demonstration module
HCT research and development in SSC (Surrey Space Centre) is focused on propulsion for small, limited on-board resources spacecraft in LEO (Low Earth Orbit). In that scope, several laboratory prototypes have been built and tested, to optimize their performance as propulsive devices. The optimization aims to increase specific impulse at low power levels, reduce heating requirements and increase the robustness of the device for use in flight opportunities. 58) 59) 60)
The HCT operation is based on field enhanced thermionic emission. A low workfunction insert is heated by an external heater to ~1100ºC. Xenon propellant, supplied to the HCT, is ionized by electrons emitted from the cathode and a plasma is formed internally in the HCT between the insert (ground) and an anode electrode (keeper). The anode electrode is kept at positive voltage and current is drawn from the insert via the plasma formed. The discharge to the keeper electrode is self-sustained once initiated, i.e. no heater power is needed. Direct thrust measurements of the HCT using the SSC thrust and facilities have shown a specific impulse of 80-85 s at a flow rate of 20 cm3/s xenon. The HCT can provide increased specific impulse capability for small satellites with the trade offs being a higher power requirement and a lower thrust than a resistojet. The HCT requires 50-60 W during heating and 40-60 W during discharge at nominal conditions.
A complete HCT module has been developed by the SSC and SSTL flight on TechDemoSat-1 (TDS-1) as an experimental enhancement to the spacecraft platform. The TDS-1 is UK Space Agency funded, and the SSTL built spacecraft is based on the SSTL-150 platform. The spacecraft has a propulsion module with a total mass of 1.5 kg of xenon to be shared between the a standard SSTL resistojet and the HCT.
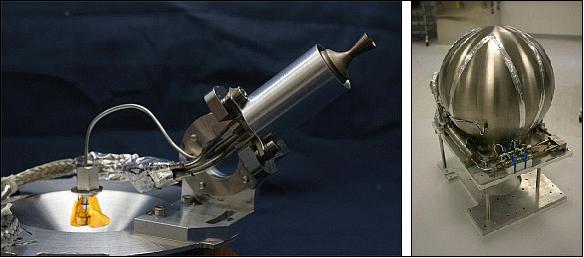
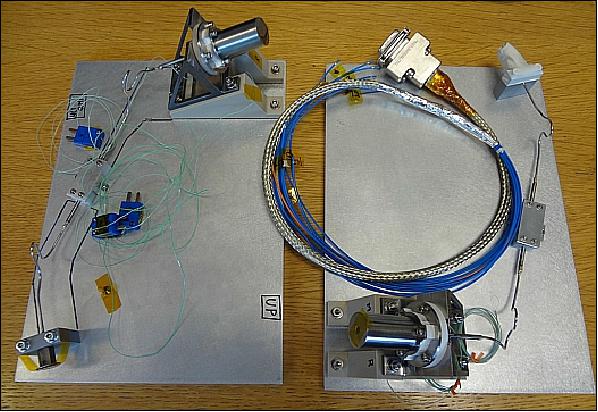
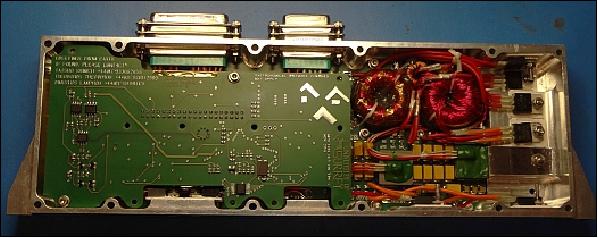
The HCT module comprises of the HCT (Hollow Cathode Thruster), FCU (Flow Control Unit), and the PPU (Power Processing Unit), developed to require minimal changes to the platform. The HCT flight and qualification models are shown in Figure39, the PPU is shown in Figure 40. The HCT module has been integrated and tested at spacecraft level.
The flight operations of the HCT will be invaluable for the future joint EP (Electric Propulsion) developments in SSC as it is the first plasma thruster to operate on an SSTL platform as a 'bolt-on' module to the flight proven xenon feed systems that SSTL typically uses for the resistojet.
References
1) "SSTL's TechDemoSat-1 to demonstrate UK innovation in space," SSTL, Oct. 18, 2010, URL: https://www.sstl.co.uk/media-hub/latest-news/2010/sstl%E2%80%99s-techdemosat-1-to-demonstrate-uk-innovation-in-space
2) Lily Dodemant, Peter Fletcher, "TechDemoSat-1 & NovaSAR-S," 3rd GSCB (Ground Segment Coordination Body) Workshop, 2012, ESA/ESRIN, Frascati, Italy, June 6-7, 2012, URL: http://earth.esa.int/gscb/papers/2012/15-TDS_NovaSAR.pdf
3) Victoria O'Donovan, "TechDemoSat-1," URL: http://www.stfc.ac.uk/ralspace/resources/pdf/asc_presentation_13.pdf
4) Lily Dodemant, Peter Fletcher, "TechDemoSat-1 & NovaSAR-S," June 6, 2012, URL: http://earth.esa.int/gscb/papers/2012/15-TDS_NovaSAR.pdf
5) Alex da Silva Curiel ,Doug Liddle, Victoria O'Donovan, Martin Unwin , Martin Sweeting, "First results from the UK TechDemoSat-1 Spacecraft," 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015
6) Victoria O'Donovan, "TechDemoSat-1," Feb. 10, 2013, URL: http://www.stfc.ac.uk/RALSpace/resources/PDF/ASC_Presentation_13.pdf
7) Patrick Blau, "TechDemoSat-1," Spaceflight 101, URL: http://www.spaceflight101.com/techdemosat-1.html
8) "SSTL announces the successful launch of UK in-orbit demonstrator satellite, TechDemoSat-1," SSTL, July 8, 2014, URL: https://www.sstl.co.uk/media-hub/latest-news/2014/sstl-announces-the-successful-launch-of-techdemosat-1
9) "Soyuz rocket with seven satellites lifts off from Baikonur," ITAR-TASS, July 8, 2014, URL: http://en.itar-tass.com/non-political/739563
10) Anatoly Zak, "Russia launches new weather watcher," July 9, 2014, URL: http://www.russianspaceweb.com/meteor_m2.html
11) Patrick Blau, "Soyuz successfully Launches Meteor-M #2 & Six Secondary Payloads," Spaceflight 101, July 8, 2014, URL: http://www.spaceflight101.com/soyuz-2-1b---meteor-m-2-launch-updates.html
12) "SSTL announces TechDemoSat-1 launch date," Space Daily, May, 27, 2014, URL: http://www.spacedaily.com/reports/SSTL_announces_TechDemoSat_1_launch_date_999.html
13) "UK's TechDemoSat-1 to launch Q3 2013," SSTL, March 5, 2013, URL: https://www.sstl.co.uk/media-hub/latest-news/2013/uk%E2%80%99s-techdemosat-1-to-launch-q3-2013
14) Peter B. de Selding, "Latest Soyuz/Fregat Delay Underscores Issue for Small-satellite Owners," Space News, Sept. 27, 2013, URL: http://www.spacenews.com/article/launch-report/37416latest-soyuzfregat
-delay-underscores-issue-for-small-satellite-owners
17) "Dauria Aerospace and Samsung will launch the first in Russia private artificial satellite of the Earth," Oct. 15, 2013, URL: http://all-rss.com/item-1070741-dauria-aerospace-and-samsung-will-launch-
the-first-in-russia-private-artificial-satellite-of-the-earth/#.UwSE3s7ihqM
18) " Polar Sea Ice Detection Using Reflected GNSS Signals Demonstrated by SSTL and NOC," SSTL Press Release, 3 February 2020, URL: https://www.sstl.co.uk/media-hub/latest-news/2020/polar
-sea-ice-detection-using-reflected-gnss-signa
19) "TechDemoSat-1 on-board camera captures drag sail deployment," SSTL Press Release, 31 May 2019, URL: https://www.sstl.co.uk/media-hub/latest-news/2019/techdemosat
-1-on-board-camera-captures-drag-sail-d
20) "New GNSS weather data sets from TechDemoSat-1," SSTL, Nov. 14, 2016, URL: https://www.sstl.co.uk/media-hub/latest-news/2016/new-gnss-weather-data-sets-from-techdemosat-1
21) Martin Unwin, Phil Jales, Jason Tye, Christine Gommenginger, Giuseppe Foti, "Developments in GNSS-Reflectometry from the SGR-ReSI in orbit on TechDemoSat-1," Proceedings of the 30th Annual AIAA/USU SmallSat Conference, Logan UT, USA, August 6-11, 2016, paper: SSC16-XII-07, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=3414&context=smallsat
22) Clara Chew, Rashmi Shah, Cinzia Zuffada, George Hajj, Dallas Masters, Anthony J. Mannucci, "Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission," Geophysical Research Letters, Manuscript Online, March 25, 2016, DOI: 10.1002/2016GL068189
23) "Radiation Monitor Plots the South Atlantic Anomaly," SST-US, Jan. 29, 2016, URL: https://web.archive.org/web/20160507045657/http://www.sst-us.com/blog/january-2016/radiation-monitor-plots-the-south-atlantic-anomaly
24) Giuseppe Foti, Christine Gommenginger, Philip Jales, Martin Unwin, Andrew Shaw, Colette Robertson, Josep Roselló, "Spaceborne GNSS reflectometry for ocean winds: First results from the UK TechDemoSat-1 mission," Geophysical Research Letters, Vol. 42, July 7, 2015, pp: 5435–5441, doi:10.1002/2015GL064204, URL: http://onlinelibrary.wiley.com/store/10.1002/2015GL0
64204/asset/grl53082.pdf?v=1&t=imhq2
p2a&s=0bdf99d26298314bca4ee156222f56ab065f9665
25) "Switch-on for TechDemoSat-1's payloads -8 new technologies on-board TechDemoSat-1 begin their 3 year mission," SSTL, Oct. 24, 2014, URL: http://www.sstl.co.uk/Blog/October-2014/Switch-on-for-TechDemoSat-1-s-payloads
26) "Space collision course avoided for TechDemoSat-1," SSTL, Oct. 24, 2014, URL: https://web.archive.org/web/20180312115642/http://www.sstl.co.uk/Blog/October-2014
27) "SSTL demonstrates new ocean winds and waves measuring method," Space Daily, Sept. 29, 2014, URL: http://www.spacedaily.com/reports/SSTL_demonstrates_innovative
_method_for_measuring_ocean_winds_and_waves_from_space_999.html
28) "Using Satnav signals to measure wind and waves,," SSTL, Sept. 2014, URL: https://web.archive.org/web/20140929020820/http://www.sstl.co.uk/Blog/September-2014/Using-SatNav-signals-to-measure-winds-and-waves
29) "SSTL marks completion of TechDemoSat-1 LEOP phase with a "selfie"," SSTL, July 25, 2014, URL: https://www.sstl.co.uk/media-hub/latest-news/2014/sstl-marks-completion-of-techdemosat-1-leop-phase-with-a-selfie
30) M. Unwin, R. de Vos Van Steenwijk, Alex Da Silva Curiel, M. Cutter, F. Brent Abbott, C. Gommenginger, C. Mitchell, S. Gao, "Remote Sensing Using GPS Signals – The SGR-ReSI Instrument," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, paper: SSC11-I-10
31) Reynolt de Vos van Steenwijk, Martin Unwin, Philip Jales, "Introducing the SGR-ReSI: A Next Generation Spaceborne GNSS Receiver for Navigation and Remote-Sensing," Proceedings of NAVITEC 2010 (5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing), Noordwijk, The Netherlands, Dec. 8-10, 2010
32) M Unwin, R. de Vos Van Steenwijk, Alex Da Silva Curiel, M. Cutter , C. Gommenginger, C. Mitchell, S. Gao, "Remote Sensing using GPS signals – The SGR-RESI instrument," 8th IAA (International Academy of Astronautics) Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 4-8, 2011; URL of presentation, IAA-B8-0701: http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/
archiv8/Presentations/IAA-B8-0701%20GR%20ReSI.pdf
33) Martin Unwin, "The SGR-ReSI – A Small Satellite Instrument for Sensing the Earth using GNSS Signals," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.3.3
34) Mike Cutter, Martin Unwin, Reynolt de Vos Van Steenwijk, Cathryn Mitchell, Steven Gao, "The SGR-ReSI – A Small Satellite Instrument for Sensing the Earth using GNSS Signals," Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B4.6A.8
35) Martin Unwin, "ESA Study, GNSS Reflectometry Instrument & Algorithms," NCEO/CEOI (National Centre for Earth Observation/Centre for Earth Observation Instrumentation) Joint Science Conference, Nottingham, UK, Sept 18-20, 2012, URL: http://www.nceo.ac.uk/assets/presentations/2012_conference_
NOTTINGHAM/NCEOCONF2012_0919_Unwin.pdf
36) Martin Unwin, Philip Jales, Paul Blunt, Stuart Duncan, "Preparation for the First Flight of SSTL's Next Generation Space GNSS Receivers," Proceedings of NAVITEC 2012, 6th ESA Workshop on Satellite Navigation Technologies, ESA/ESTEC, Noordwijk, The Netherlands,Dec. 5-7, 2012
37) Martin Unwin, Philip Jales, Alex da Silva Curiel, Mark Brenchley, Martin Sweeting, Christine Gommenginger, Josep Rosello, "Sea State Determination with GNSS Reflectometry on TechDemoSat‐1," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
38) Philip Whittaker, Martin Cohen, David Hall, Rachel Bird, Luis Gomes, "NovaSAR – A Novel, Low Cost, Medium Resolution Spaceborne SAR System Development," Proceedings of the 3rd Workshop on Advanced RF Sensors and Remote Sensing Instruments (ARSI), Noordwijk, The Netherlands, Sept. 13-15, 2011, URL: http://www.congrex.nl/11c11/ARSI%20papers/WHITTAKER_ARSI_Paper.pdf
39) Philip Whittaker, Rachel Bird, Martin Cohen, David Hall, Luis Gomes, Alex da Silva Curiel, Philip Davies, "A Low Cost SAR Solution for Disaster Management and Environmental Monitoring Applications," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4.4.10
40) "TechDemoSat-1: Payloads," SSTL, URL: https://web.archive.org/web/20111129020402/http://www.sstl.co.uk/missions/techdemosat-1/techdemosat-1/techdemosat-1--payloads
41) Craig Underwood, Ben Taylor, Alex Dyer, Chris Ashton, "MuREM: A Micro Radiation Environment and Effects Monitor for Small Satellites," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11-B4-6A-5
42) Craig Underwood, Ben Taylor, Alex Dyer, Alex Hands, Keith Ryden, Sam Rason, "Development of Miniaturized Radiation Environment Monitors for the TDS-1 Mission: MuREM/RM Flight Results," 10th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 20-24, 2015, paper: IAA-B10-0803, URL of presentation: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/
dokumente/archiv10/pdf/0803_(Underwood).pdf
43) "SSTL tests TechDemoSat-1 plasma population payload," SSTL, Dec. 19, 2011, URL: https://www.sstl.co.uk/media-hub/latest-news/2011/sstl-tests-techdemosat-1-plasma-population-payload
44) D. Kataria, A. Smith, A.L. Aruliah, A. Coates, M. Hailey, R. Cole, H. Hu, E. Ueberschar, "Miniaturized Ion and Neutral Mass Spectrometer for use on CubeSats," Fourth European CubeSat Symposium, ERM (Ecole Royale Militaire), Brussels, Belgium, Jan.30-Feb. 1, 2012
45) "Low resource Plasma analysis, Charged Particle Spectrometer – ChaPS," URL: http://www.technology-forum.com/fileadmin/technologies/1309963831_1447.pdf
46) Doug Griffin, Renato Turchetta, Henrique Araújo, Nicola Guerrini, Edward Mitchell, Alessandra Menicucci, Eamonn Daly, Andrew Marshall, Olly Poyntz-Wright, Tom Morse, Simon Woodward, "Highly Miniaturized Radiation Monitor (HMRM)," Space Radiation & Plasma Environment Monitoring Workshop,ESA/ESTEC, Noordwijk, The Netherlands, May 9-10, 2012, URL: http://space-env.esa.int/indico/getFile.py/access?contrib
Id=9&resId=0&materialId=slides&confId=14
47) N. Guerrini, R. Turchetta, D. Griffin, T. Morse, A. Morse, O. Poyntz-Wright, S. Woodward, E. Daly, A. Menicucci, H. Araujo, E. Mitchell, "Design and characterization of a highly miniaturized radiation monitor HMRM," Copyright © 2013 Elsevier B.V.
48) Ralspace Digital, URL: [web source no longer available]
49) R. Turchetta, "CMOS Active Pixel Sensors for space radiation monitoring," Advances on Space Radiation and Plasma Environment Monitoring, Data Analysis and Flight Opportunities Workshop, ESA/ESTEC, Noordwijk, The Netherlands, May 9-10, 2012, URL: http://indico.cern.ch/getFile.py/access?contribId=5&resId=1&materialId=slides&confId=193713
50) http://www.thelangtonstarcentre.org/index.php/what-is-lucid
51) http://www.thelangtonstarcentre.org/images/appendix.pdf
52) "TechDemoSat-1's LUCID: a novel cosmic ray detector built by students," SSTL, URL: https://web.archive.org/web/20161023120720/http://www.sstl.co.uk/Blog/February-2013/TechDemoSat-1-s-LUCID--a-novel-cosmic-ray-detector
53) Joanna Barstow, "A Small Satellite with Big Plans: TechDemoSat-1," University of Oxford, June 13, 2014, URL: https://www2.physics.ox.ac.uk/blog/astro-blog/2014/06
/13/a-small-satellite-with-big-plans-techdemosat-1
54) Samir A. Rawashdeh, James E. Lumpp, Jr., James Barrington-Brown, Massimiliano Pastena, "A Stellar Gyroscope for Small Satellite Attitude Determination," Proceedings of the 26th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, USA, August 13-16, 2012, paper: SSC12-IX-7, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1078&context=smallsat
55) Stefano Redi, Vincenzo Capuano, Samir A. Rawashdeh, Alexander Finch, Massimiliano Pastena, James Barrington-Brown, "Highly integrated, low volume and mass ADCS subsystem for picosatellites," Proceedings of the 63rd IAC (International Astronautical Congress), Naples, Italy, Oct. 1-5, 2012, paper: IAC-12-B4.6B.7
56) Rahul Raguram, Jan-Michael Frahm, Marc Pollefeys, "A Comparative Analysis of RANSAC Techniques Leading to Adaptive Real-Time Random Sample Consensus," ECCV (European Conference on Computer Vision), 2008, URL: https://web.archive.org/web/20180720090646/http://www.cs.unc.edu/~rraguram/papers/eccv2008.pdf
57) "The De-Orbit Sail that will bring TechDemoSat-1 out of orbit," SSTL, URL: https://web.archive.org/web/20140413080605/http://www.sstl.co.uk/Blog/September-2013/The-De-Orbit-Sail-that-will-bring-TechDemoSat-1-ou
58) V. J. Lappas, T. Harle, D. Lamprou, A. Knoll, P. Shaw, P. Bianco, M. Perren, "Micro Electric Propulsion Technology for Small Satellites: Design, Testing and In-Orbit Operations," Proceedings of the 64th International Astronautical Congress (IAC 2013), Beijing, China, Sept. 23-27, 2013, paper: IAC-13-B4.6A.3
59) D. Lamprou, V. J. Lappas, T. Shimizu, D. Gibbon, P. Perren, "Hollow Cathode Thruster Design and Development for Small Satellites," 32nd IEPC (International Electric Propulsion Conference), Wiesbaden, Germany, Sept. 11-15, 2011, Vol. IEPC-2011-151, URL: [web source no longer available]
60) M. Pollard, D. Lamprou, "The Design, Development, Manufacture and Test of an Electric Propulsion System for Small Spacecraft," Proceedings of Space Propulsion 2012, Bordeaux, France, May 7 –10, 2012, Vol. SP2012-2394166
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top