TeikyoSat 3
EO
Mission complete
Teikyo University
Quick facts
Overview
| Mission type | EO |
| Agency | Teikyo University |
| Mission status | Mission complete |
| Launch date | 27 Feb 2014 |
| End of life date | 31 Mar 2014 |
| CEOS EO Handbook | See TeikyoSat 3 summary |
TeikyoSat-3 (Microbe observation from space)
Overview
TeikyoSat-3 is a microsatellite mission of the Department of Aerospace Engineering at Teikyo University, Tochigi, Japan. The objective of TeikyoSat-3 mission is to develop the growth system of the slime mold, and the observation system to observe a cellular slime mold called dictyostelium discoideum mounted on this satellite. The goal of the TeikyoSat-3 mission is to observe how the microgravity environment and the cosmic radiation affect a slime mold packaged into a container which is retained the 1 atmosphere and maintained in the temperature range of 12-28ºC. 1)
Minimum success | Success in communicating between the ground station at Teikyo University and TeikyoSat-3 |
Full success | Success in receiving the imagery of the slime mold which is taken by camera system of TeikyoSat-3 |
Extra success | Success in the comparison experience to affect the microgravity and the cosmic radiation to the slime mold. |
Spacecraft
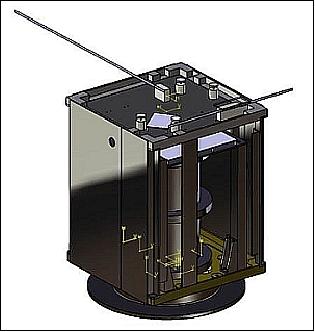
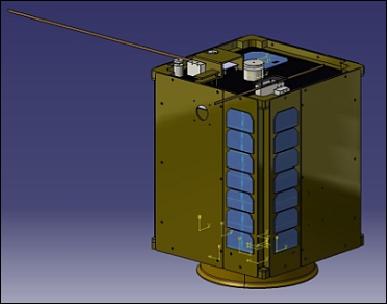
The microsatellite bus has a size of 32 cm x 32 cm x 440 (H) cm and a mass of ~ 20 kg. The requirements call for a mission life of 1 month. The mission has no requirements on attitude control; hence, the spacecraft tumbles freely on orbit after deployment.
EPS (Electrical Power Subsystem): Use of body-mounted solar cells and a power distribution system.
RF communications: Use of an amateur radio communications transceiver of NISHI Lab. The housekeeping data are transmitted in a CW beacon (100 mW output). The downlink is in UHF band at 437.450 MHz (dipole antenna, 800 mW output), the uplink is in the VHF band at 145 MHz (monopole antenna). The imagery is downlinked in the UHF band using AFSK (Amplitude Frequency Shift Keying) modulation. 2)
A modem of Axelspace is used which controls the transceiver receiver. The controller uses a Morse encoding function for beacons and an AX.25 packet abnormal-conditions function for command telemetry.

Launch
The TeikyoSat-3 microsatellite was launched as a secondary payload on the H-IIA 202 vehicle of JAXA on February 27, 2014. The primary payload on this flight was GPM (Global Precipitation Measurement) Core mission of JAXA and NASA. The launch site was the Tanegashima Space Center, Japan. 3) 4)
The secondary Japanese payloads manifested by JAXA on the GPM Core mission were: 5)
• ShindaiSat (Shinshu University Satellite), a microsatellite (35 kg) to demonstrate LED light as an optical communications link.
• The STARS-2 (Space Tethered Autonomous Robotic Satellite-2) nanosatellite technology mission of Kagawa University, Takamatsu, Kagawa, Japan
• TeikyoSat-3, a bioscience microsatellite (~20 kg) of Teikyo University
• ITF-1 (Imagine The Future-1), a 1U CubeSat of the University of Tsukuba, Tsukuba, Japan.
• OPUSat (Osaka Prefecture University Satellite), a 1U CubeSat
• INVADER (INteractiVe satellite for Art and Design Experimental Research) of Tama Art University, a 1U CubeSat
• KSat-2 (Kagoshima University Satellite-2), a CubeSat mission with a mass of ~ 1.5 kg. 6)
Orbit of the primary and secondary satellites: Non-sun-synchronous circular orbit, altitude = 407 km, inclination = 65º.
After the release of the GPM Core Satellite, the second stage performed attitude maneuvers and slightly changed its orbit for the deployment of the seven secondary payloads that include small spacecraft and CubeSats dedicated to scientific missions, technical demonstrations and outreach projects. 7)
Sensor Complement
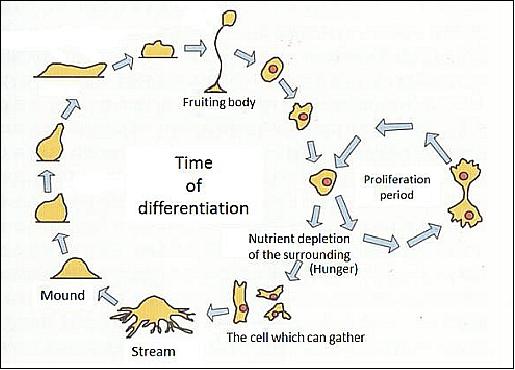
TeikyoSat-3 is equipped with a slime mold called “dictyostelium discoideum” to observe the growth process of fruiting body formation under a microgravity and a high radiation space environment. In addition, it increases the likelihood of performing a technology established biological experiments in small satellite to apply to microbial experiments other than slime mold , the aim is to contribute to biology and medicine. 8)
To allow the mold to survive in space, the sample chamber is pressurized and uses a thermal control system to keep the interior at a temperature that the mold can tolerate. The sample is studied via imagers including microscopic cameras that return photos of the mold. The images are downlinked via 430 MHz UHF downlink. A dedicated ground station at Teikyo university is used for imagery downlink and command uplink that is done via VHF.
Slime Mold Apparatus
The experiment, also referred to as the mission subsystem, consists of the growth system of the slime mold and the observation system to observe a cellular slime mold, called dictyostelium discoideum. A slime mold is a microbe without a brain, but its ecology has been studied by many research institutions, because it is expected to apply the behavior of slime molds to the traffic and information technology. The requirements call for the slime mold to be grown within the temperature range of 12-28ºC under 1 atmosphere of pressure. The slime mold apparatus takes a picture of the growth process of the slime mold in the space, and then downlinks the imagery to the ground station.
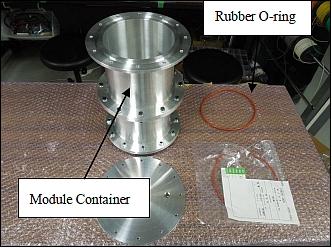
The project designed and manufactured an aluminum flange container, referred to as module container, to retain 1 atmosphere. An O-ring in the flange maintains the pressure in the module container within bounds. The container module features a heater inside the module and an insulator outside the module to maintain the required temperature range.
The observation system of the slime mold is comprised of an imager, a CCD detector and the lens-barrel. The experiment features two types of slime mold specimens to be able to compare their behavior in the space environment . The camera system is fixed in the mission module; it takes images of each slime mold by driving the laboratory dish. The rotating part uses a sliding mechanism and is driven by a stepping motor.
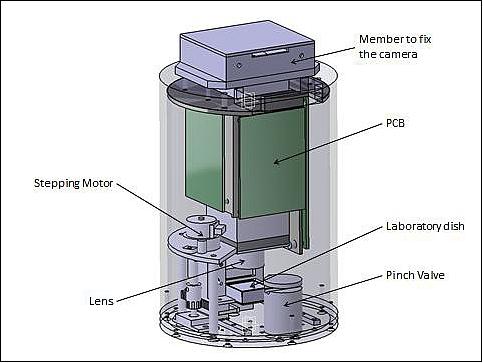
A typical image of the slime mold taken by the camera system is shown in Figure 6. The magnification of an object lens mounted in the top of lens-barrel is five.

References
1) Katsuya Shibata, Masaaki Kawamura, Hirotoshi Kubota, “The Development of the Microbe Observation Micro-satellite TeikyoSat-3,” Proceedings of the 29th ISTS (International Symposium on Space Technology and Science), Nagoya-Aichi, Japan, June 2-8, 2013, paper: 2013-f-01
2) “TeikyoSat-3,” IARU Amateur Satellite Frequency Coordination, March 7, 2013, URL: http://www.amsatuk.me.uk/iaru/finished_detail.php?serialnum=293
3) “Launch Result of H-IIA Launch Vehicle No. 23 with GPM Core Observatory onboard,” MHI, JAXA, Feb. 28, 2014, URL: http://www.jaxa.jp/press/2014/02/20140228_h2af23_e.html#ref
4) Steve Cole, Rani Gran, Takayuki Kawai, “NASA & JAXA Announce Launch Date for GPM,” NASA, Dec. 26, 2013, URL: http://pmm.nasa.gov/mission-updates/gpm-news/nasa-jaxa-announce-launch-date-gpm
5) Toshinori Kuwahara, Kazaya Yoshida, Yuji Sakamoto, Yoshihiro Tomioka, Kazifumi Fukuda, Nobuo Sugimura, Junichi Kurihara, Yukihoro Takahashi, “Space Plug and Play Compatible Earth Observation Payload Instruments,” Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, Paper: IAA-B9-1502
6) http://leo.sci.kagoshima-u.ac.jp/~n-lab/KSAT-HP/Ksat2_E.html
7) Patrick Blau, “GPM Core - Mission Updates,” Spaceflight 101, Feb. 27, 2014, URL: http://www.spaceflight101.com/gpm-core-mission-updates.html
8) http://club.uccl.teikyo-u.ac.jp/~space_system_society/teikyosat-3e.html
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).