TopSat (Tactical Operational Satellite, also known as TopSat 1 and TacSat 0)
EO
Atmosphere
Radiation budget
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | UKSA |
| Mission status | Mission complete |
| Launch date | 27 Oct 2005 |
| End of life date | 31 Dec 2010 |
| Measurement domain | Atmosphere, Land |
| Measurement category | Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Short-wave Earth surface bi-directional reflectance |
| Instruments | TOPSAT Telescope |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See TopSat (Tactical Operational Satellite, also known as TopSat 1 and TacSat 0) summary |
TopSat (Tactical Operational Satellite, also known as TopSat 1 and TacSat 0)
TopSat is a UK (United Kingdom) collaborative low-cost satellite mission of QinetiQ (formerly DERA), SSTL (Surrey Satellite Technology Ltd.), RAL (Rutherford Appleton Laboratory), and Infoterra, funded by the UK Ministry of Defense (MoD) and by the BNSC (British National Space Centre) small satellite initiative (Mosaic). The overall objectives are to demonstrate the capabilities of small spacecraft on a high-resolution imaging mission, including an end-to-end ground segment with services for a commercial user community (direct user access, innovative solutions).
In this setup, the mission is designed and managed by QinetiQ (QinetiQ is the prime agency and system technical authority and the owner of the spacecraft; QinetiQ provided and integrated also the payload avionics), SSTL is building and integrating the microsatellite bus, RAL is developing the imaging instrument, while Infoterra is responsible for data distribution (rapid delivery) and the marketing services. The data is also being used by institutional users (government agencies, military, etc.). The demonstration mission is planned for one year. There will be an evaluation in terms of all aspects of performance.
Spacecraft
The new spacecraft structure of SSTL employs an enhanced microsatellite bus, referred to as MicroSat-150 (TopSat happens to be the first incarnation of this new bus by SSTL), which offers a high volume efficiency in multiple launches and more solar power generation capability. In particular, the design of the TopSat imager had a significant impact on the design of the platform itself, and so TopSat incorporates some significant differences to other SSTL modular microsatellites. The size and mass of the payload, as well as the requirements for structural and thermal stability have had a very visible impact on the design - notable are the canted panels and the external accommodation of the payload. Many changes lie deeper in the design, such as the advanced attitude determination and control system capable of accurate pointing, agile maneuvering, and FMC (Forward Motion Compensation) slewing maneuvers. 1) 2) 3) 4)
The S/C structure is largely made from aluminium, in the form of machined parts and honeycomb panels. The interior features a stack of microtrays, which form the load-bearing structure, and some supporting panels added to give the payload panel stability. Three self-supporting solar panels are mounted on the exterior. The module trays have been strengthened to provide good support to the payload. Many items, such as the VHF receivers, battery, fibre optics gyro and Earth horizon sensor electrical interfaces, are housed in alternative packages to allow them to be taken out of the stack and maintain a low S/C profile.

TopSat is three-axis stabilized (zero momentum-bias attitude control system). Attitude is maintained by reaction wheels, the momentum is being off-loaded through magnetorquers. The reaction wheel/magnetorquer combination provides also a S/C pointing capability of ±30º (to increase target availability and revisit rates). Attitude is sensed by Earth and sun sensors. A high-precision three-axis fiber-optic gyro (FOG, Litton 200S) permits the offtrack and pitch compensation maneuvers required of the mission and image rectification if needed. An attitude stability of 0.002º is provided for image acquisition (1.5 s), the control accuracy is ±0.2º with a knowledge of ±0.1º in all axes. 5) 6) 7) 8) 9) 10) 11) 12) 13) 14)
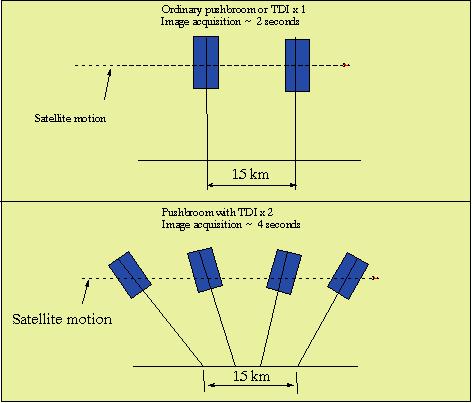
The S/C platform is capable of supporting TDI (Time Delay Integration), an attitude mode where the S/C maneuvers to allow the camera to “look” at its target for a longer period of time - equivalent to increasing the exposure time on a camera. scanning effect. During TDI observations the pitch of the S/C is manipulated such that it stares at the target for a longer period. At the beginning of the image, the camera is facing forward, toward the target, and by the end it is facing backwards, still toward the target. TopSat is capable of x 8 TDI, thus the camera is oriented to face the target for 8 times longer than an ordinary pushbroom mode. Typically, operations will be using x2 to x4 TDI. For the imaging sequence, two ADCS (Attitude Determination and Control Subsystem) functions are supported simultaneously:
• The ability to rotate the S/C in roll to image target areas up to 30º off-track
• The ability to rotate the S/C in pitch (up to ±20º) to support IMC (Image Motion Compensation) in which the payload sensor line-of-sight sweeps the Earth at a rate less than the orbit rate. This rate is associated with the TDI factor = 1. TDI= infinity corresponds to the payload pointing at a fixed location throughout the imaging.
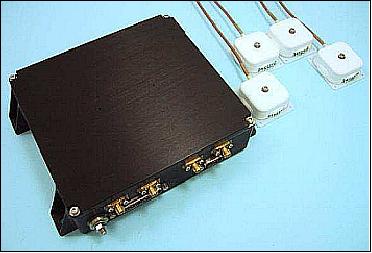
The SGR-20 (Space GPS Receiver-20) developed by SSTL (with ESA support) provides orbit determination and on-board clock updates. The capability of the SGR-20 permits also to conduct attitude experiments. For this purpose four Micropulse L1 patch antennas are mounted on the space-facing (-Z) facet of the spacecraft.
The SGR-20 is a single-frequency 24-channel receiver, which is dynamically reconfigurable to allow 6 to 12 channels per baseline, providing interferometric carrier-phase measurements on up to three baselines simultaneously. The SGR-20 also has the facility to upload new software to allow for development and testing whilst in-orbit. The SGR chipset is based on a high performance commercial Zarlink GPS chipset and ARM60B 32 bit RISC processor.
With TopSat, SSTL successfully demonstrated real-time GPS attitude determination on a microsatellite platform. This research has shown that the SGR-20 can robustly solve the integer ambiguity problem and provide a real-time attitude point solution that is accurate to the degree level when compared with the standard suite of attitude sensors using on small satellites. The achieved accuracy for the pitch and yaw axes is close to the achievable accuracy predicted by theory when using double-difference measurements, although some biases remain, possibly due to a combination of multipath and systematic errors in the ADCS reference attitude. 15)
Solar power of 55 W (orbital average) is provided by three body-mounted solar panels (GaAs cells). The NiCd battery stack is comprised of 20 cells each of 4 Ah capacity. The command and data handling subsystem employs the 80386 processor architecture providing a semi-autonomous control of the satellite. A dual redundant CAN network is used as the primary information exchange mechanism. The spacecraft has an overall mass of 115 kg. The design life is one year, although there are no life limiting factors in the design (e.g. fuel).
Launch
A launch of TopSat took place on Oct. 27, 2005 on a Cosmos-3M launch vehicle from the Plesetsk Cosmodrome, Russia (primary payload). The launch provider was Polyot. In addition, the following satellites (secondary payloads) were being flown on this launch:
- China-DMC+4 (Beijing-1) of SSTL
- SSETI Express (Student Space Exploration and Technology Initiative) coordinated by ESA
- Mozhayets 5 of Russia
- Sinah 1 of Iran
- CubeSat-XI-V of the University of Tokyo, Japan
- UWE-1 of the University of Würzburg, Germany
- NCube-2 (Norwegian CubeSat-2) of Norway
- Rubin-5 (OHB, Bremen, Germany).
Orbit
Sun-synchronous circular orbit, altitude = 686 km, inclination = 98º, period = 98.5 min, 10:30 local equator crossing time. A four day target revisit capability is provided.
RF Communications
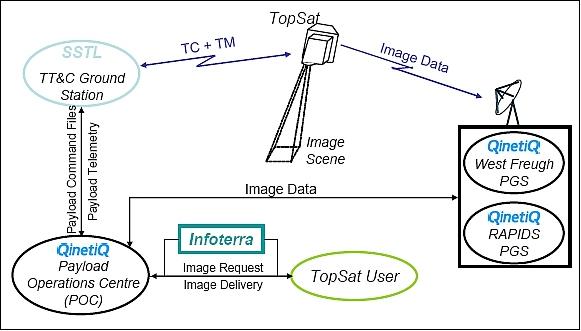
An on-board storage capability in flash memory of up to four full and uncompressed scenes (2 Gbit) is provided. Standard S-band link for data rates of up to 10 Mbit/s. QinetiQ is operating the Payload Operations Centre and data ground segment. In addition, there is an X-band downlink for transmissions to mobile ground stations with a data rate of 10 Mbit/s developed by QinetiQ (QPSK modulation). The X-band downlink is a TopSat demonstration capability.
All mission operations are provided by QinetiQ. Two ground stations are being used, one is the QinetiQ 13 m station located at West Freugh, Scotland, and one at BURS (Bradford University Remote Sensing), UK. An S-band tracking beam is provided to enable spacecraft tracking with the mobile ground stations. Note: Data delivery direct to a local user has been demonstrated using a mobile ground station within a few minutes from capture. 16)

Design life | 1 year |
Pan and MS imagery provided by RALCam1 | 2.8 m GSD (Pan), 5.6 m GSD (MS) |
Swath width | 15 km for Pan, 10 km for MS |
Image quality | Requires FMC (Forward Motion Compensation) |
Onboard data storage | ~300 Mbit (equivalent to 4 images) |
Payload data downlink | X-band at 11 Mbit/s |
Image throughput | 5 images/day |
TT&C communications | VHF/UHF |
Electric power storage | NiCd battery |
Spacecraft body pointing capability | ±30º in two axis (cross-track and along-track) |
Propulsion system | None |
Spacecraft mass, power | ~115 kg, 55 W (orbital average) |
Mission Status
• In 2012, TopSat is in hibernation and is not being used in any operational sense. Housekeeping data is still routinely downloaded so that SSTL can monitor battery status and other key indicators, but the camera is not being used to acquire images (Ref. 17).
• In early 2011, the situation with TopSat is unchanged. The spacecraft health is good - but no operations are conducted. RAL/QinetiQ are considering other funding opportunities to allow operations to start again (Ref. 17).
• TopSat is fully functional and in good health in 2010 (spacecraft and camera). However, TopSat operations have been suspended since August 17, 2008. The reason: The demand for imagery from TopSat is not sufficient to justify the cost of operations. 17)
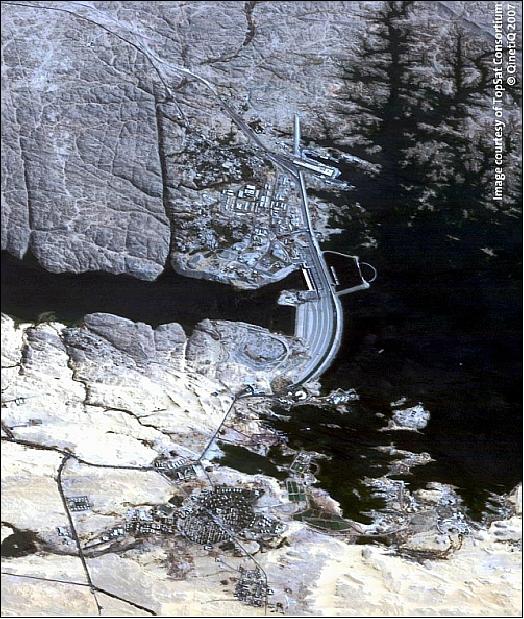
• By virtue of its small size and low cost, TopSat has opened the way for affordable constellations capable of launch on a single small launch vehicle. In the case of imaging spacecraft, this will reduce image costs and increase the availability of data. - In the meantime, the TopSat program has become a commercial venture between the TopSat consortium partners. During this time, the TopSat consortium has embarked on a series of experiments to demonstrate the performance of the system, both in image timeliness and image quality. 18) 19)
• The military utility of TopSat was assessed by the UK MoD (Ministry of Defense) TopSat Users Group (TUG) through an evaluation of the performance of the satellite system during a series of operational experiment trials through 2006-2007. 20)
• In January 2007, several end-to-end timeliness demonstrations were conducted by the TopSat Consortium, emulating the tasking of the TopSat satellite directly with an uplink facility located within a theater of operations, and the provision of fresh imagery into theater through a deployed data ground station. Imagery was commanded, acquired, down-linked and processed within a single image pass, achieving an end-to-end timeliness using the mobile ground station of less than 37 minutes.
• Plans call for: a) a number of demonstrations (use of experimental onboard software) within TopSat's second year of operations, and b) use of a portion of the TopSat observation capacity as a 3rd party mission.
• Key achievements: a) proven feasibility of building and launching a low cost satellite which can generate commercial quality imagery; b) demonstration of a low risk route to developing a fully operational low cost electro-optic capability; c) high imaging performance at an affordable price; d) operational flexibility (high responsiveness tasking).
Sensor Complement
RALCam1 (Rutherford Appleton Laboratory Camera 1)
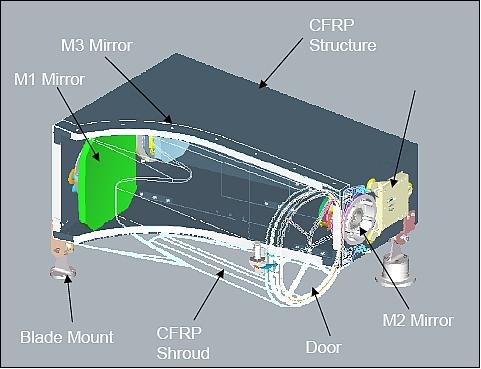
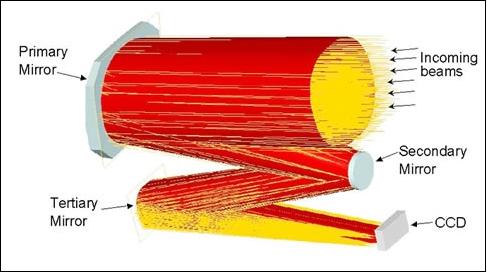
RALCam-1 was designed and developed at RAL. The objective is to provide panchromatic (2.5 m resolution) and multispectral imagery (5 m resolution) over a wide swath. The optical system employs a folded focal length of 1680 mm and a collecting aperture of 200 mm diameter. A three-mirror off-axis, aspheric design (TMA) is used to provide flat image projections free of first order aberrations. Two of the mirrors are off-axis sections resulting in an obstruction-free aperture system. The design features a nearly diffraction-limited wide FOV (Field of View) of 1.4º in the cross-track direction and a sufficiently wide FOV in along-track to accommodate a number of detector array configurations (pushbroom operation). The telescope, the optics, all sensors and their associated front-end electronics are mounted on a CFRP (Carbon Reinforced Polymer) optical bench providing the needed stiffness, low thermal expansion, and alignment qualities. The FPA (Focal Plane Assembly) uses two separate CCDs, one for each channel (i.e., PAN and MS image detection). TDI (Time Delay and Integration) is provided through pitch compensation (by rotating the spacecraft counter to the satellite track velocity vector), increasing the integration time of the imagery and enhancing the SNR (TDI by motion compensation). The objectives call for up to 8 times TDI with an SNR of 50 in the prime band. The system is designed for a 90% probability of achieving 15% MTF at the Nyquist frequency after manufacture, assembly, integration and launch and including factors for the optical system, detector sampling, temporal sampling, jitter and smear. 21) 22)
Spectral range of panchromatic band | 0.5-0.7 µm |
Optical design of camera | 1680 mm focal length (folded), 200 mm aperture, TMA (Three-Mirror off-axis Aspheric) design (reduction of aberrations) |
Pan detectors | Kodak 6000 element array (Si) at 7 µm pitch |
Spatial resolution | Pan = 2.8 m, MS = 5.6 m |
FOV (camera field of view) | ±1.2º x ±0.35º (nearly diffraction limited wide FOV) |
Swath width | 15 km for Pan, 10 km for MS imagery |
Maximum scene length | About 30 km |
FOR (Field of Regard) | Body pointing capability of ± 30º in two axes |
On-board data compression | The DERA data handling unit (DHU) provides a DSP which can be programmed with different image handling techniques |
Instrument mass | 32 kg including FPA, electronics, thermal control, aperture cover and power conditioning |
Operational temperature of RALCam1 | 15º C ± 5º C (temperature regulated by thermal insulation) |
Instrument power | 30 W operational, 10W standby (thermal control) |
Instrument size | 677 mm x 600 mm x 300 mm |
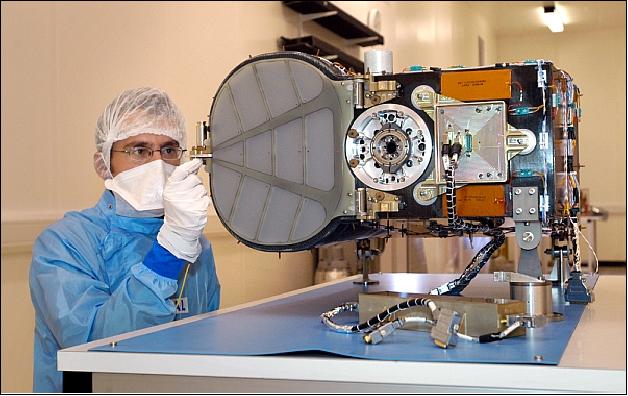
The camera casing is built as a monocoque honeycomb CFRP structure, to provide a rigid structure capable of maintaining mirror alignment during in-orbit thermal cycling. The case stands on aluminium blade flexures designed to reduce the effects of the different thermal expansions between the payload mounting panel and the camera itself. The camera is mounted externally to the spacecraft platform, it uses heaters and MLI blankets to maintain temperature within limits. It is mounted to the platform using blade flexures that accommodate some difference in thermal expansion between the platform and payload that may otherwise warp the camera. Three internal, non-structural baffles protect the system from stray light. A further baffle covers the top of the monocoque and provides an attachment point for an aperture cover.
Note on imager swath width: The TopSat swath width specification is 15 km for Pan and 10 km for MS from the 600 km orbit originally specified for TopSat. Of course from the 686 km orbit the satellite is actually in, this is slightly different (namely larger). The camera optical field of view is actually larger than the swath (i.e., not all of optical FOV is populated on the focal plane, since it is a technology demonstrator and the full optical FOV was not required for TopSat). On the other hand, RAL documentation specifies the swath width of the imager as being 25 km (which applies only to a full focal plane). 23)

References
1) A. Cawthorne, A. da Silva Curiel, M. Sweeting, “The Next Generation DMC Small Satellite Platform for High-Resolution Imaging,” Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.4.01
2) W. A. Levett, J. Laycock, E. Baxter, “The TopSat Demonstrator: Opening the way for high quality and timely imagery from an affordable constellation,” Proceedings of the 57th IAC/IAF/IAA (International Astronautical Congress), Valencia, Spain, Oct. 2-6, 2006, IAC-06-B5.4.08
3) E. Baxter, J. Laycock, W. A. Levett, “TopSat: High quality imager from a low cost satellite,” Proceedings of the 4S Symposium: `Small Satellite Systems and Services,' Chia Laguna Sardinia, Italy, Sept. 25-29, 2006, ESA SP-618
4) http://microsat.sm.bmstu.ru/e-library/SSTL/Mission_Topsat.pdf
5) M. E. Price, “TopSat - A Small Satellite Approach to High Resolution Optical Imaging,” Proceedings of SPIE, Vol 4814, SPIE Annual Meeting 2002: Remote Sensing and Space Technology, July 7-11, 2002, Seattle, WA
6) D. G. Dungate, D. Liddle, A. Cropp, W. Levett, M. Price, H. Steyn, “TOPSAT Imaging Mode ADCS Design,” 5th International ESA Conference on Guidance Navigation and Control Systems, Frascati, Italy, Oct. 22-25, 2002
7) P. Brooks, ”TopSat - High Resolution Imaging From a Small Satellite,” Proceedings of the 3rd International Symposium of the IAA, Berlin, April 2-6, 2001, pp. 319-322
8) Camera image courtesy of RAL, spacecraft image courtesy of QinetiQ
9) K. M. Wallace, I. Parker, “The Topsat Satellite,” IGARSS 2001, Sydney, Australia, July 9-13, 2001
10) A. Wicks, S. Jason, J. Harrison, “ An EO Constellation based on the TopSat Microsatellite: Global Daily Revisit at 2.5 meters,” AIAA/USU Conference on Small Satellites, Aug. 13-16, 2001, Logan, UT, SSC01-I-6
11) P. Brooks, ”TopSat - High Resolution Imaging From a Small Satellite,” AIAA/USU Conference on Small Satellites, Aug. 13-16, 2001, Logan, UT, SSC01-I-2
12) S. Cawley, “TOPSAT: Low-Cost High Resolution Imagery from Space,” 4th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 7-11, 2003, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-0801.pdf
13) J. Laycock, V. Van der Zel, N. Morris, G. Park, W. Levett, “High Resolution Optical Imaging with the Low Cost TopSat Small Satellite,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.4
14) D. G. Dungate, C. Morgan, S. Hardacre, D. Liddle, A. Cropp, W. Levett, M. Price, H. Steyn, “Platform Control for Space-Based Imaging: The TopSat Mission,” Proceedings of the 4S Symposium: Small Satellites, Systems and Services, Sept. 20-24, 2004, La Rochelle, France
15) Stuart M. Duncan, Martin Unwin, Martin Sweeting, Stephen Hodgart, “In-Orbit Validation of a GPS Attitude Receiver,” Proceedings of NAVITEC 2008, 4th ESA Workshop on Satellite Navigation User Equipment Technologies GNSS User Technologies in the Sensor Fusion Era, Dec. 10-12, 2008, Noordwijk, The Netherlands
16) Information provided by QinetiQ Customer Contact Team, Cody Technology Park Farnborough, UK
17) Information provided by Nigel Morris of STFC (Science and Technology Facilities Council), Farnborough, UK
18) E. Baxter, B. Levett, “TopSat: Lessons Learned from Small Satellite Mission,” Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
19) Ian Pilling, W. A. Levett, E. J. Baxter, “TopSat,” URL: http://earth.esa.int/gscb/papers/16_Pilling.pdf
20) H. S. Jolly, T. Burt, D. W. Beard, “TopSat-Assessing the Military Utility of a Tactical ISTAR Demonstrator,” 6th Responsive Space Conference, April 28 - May 1, 2008, Los Angeles, CA, USA, RS6-2008-6003
21) P. Greenway, I. Tosh, N. Morris, “Development of the TopSat Camera,” Proceedings of the 5th International Conference on Space Optics, March 30-April 2, 2004, Toulouse, France, ESA SP-554
22) http://www.sstd.rl.ac.uk/Topsat/
23) Information provided by Andrew Cawthorne of SSTL, Surrey, UK
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).