Tsinghua-1 (Tsinghua University Satellite, also known as HTQH-1 (Hangtian Qinghua 1))
EO
Atmosphere
Ocean
Multi-purpose imagery (ocean)
Quick facts
Overview
| Mission type | EO |
| Agency | Tsinghua University |
| Mission status | Mission complete |
| Launch date | 28 Jun 2000 |
| End of life date | 26 Dec 2002 |
| Measurement domain | Atmosphere, Ocean, Land |
| Measurement category | Multi-purpose imagery (ocean), Multi-purpose imagery (land), Landscape topography |
| Instruments | Imager, GPS receiver |
| Instrument type | High resolution optical imagers, Other, Communications, Data collection, Hyperspectral imagers |
| CEOS EO Handbook | See Tsinghua-1 (Tsinghua University Satellite, also known as HTQH-1 (Hangtian Qinghua 1)) summary |
Tsinghua-1 (Tsinghua University Satellite, also known as HTQH-1 (Hangtian Qinghua 1))
Tsinghua-1 is a microsatellite of Tsinghua University, developed and built in a joint venture between SSTL of Guildford, Surrey, UK, and Tsinghua (Qinghua) University in Beijing, China. The TSRC (Tsinghua Space Research Center) was set up in Oct. 1998 with the goal to integrate all space research activities at Tsinghua University and to provide a means and facilities for S/C building. The joint-venture company in Beijing is referred to as T-SSSC (Tsinghua-Surrey Small Satellite Company).
The cooperative program is to develop and build microsatellites (Tsinghua-1) and nanosatellites (THNS-1) and to provide integrated training in small satellite design. A team of 10 Chinese researchers from Tsinghua University worked alongside the SSTL team during the 18 month project and the satellite's designs were provided by SSTL to Tsinghua under a strict commercial license for their own use. 1) 2) 3) 4) 5) 6)
Spacecraft
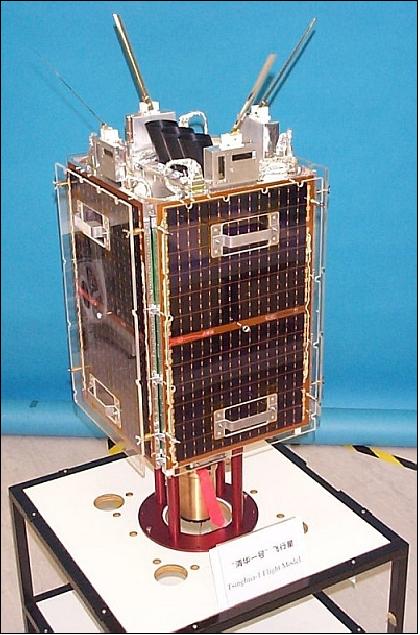
Tsinghua-1 (also referred to as ”Hangtian” in Chinese) is a demonstrator microsatellite in the 50 kg class of size: 35 cm x 35 cm x 64 cm. The overall objective is to demonstrate high-resolution imaging for disaster monitoring and mitigation on a worldwide scale. A further goal of Tsinghua-1 is to conduct communications research in LEO. The design uses the new MicroSat-70 platform modules or trays to carry the subsystems and payload.
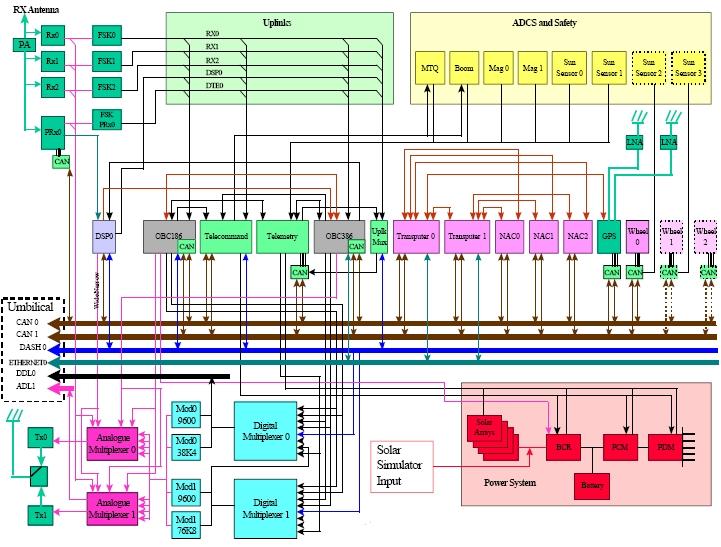
The power subsystem design includes the regulation, protection and distribution of a 35 W solar array (4) and 7 Ah NiCd batteries. This subsystem essentially offers two buses: an unregulated 14 V bus and a regulated 5 V bus. The three payload modules include the GPS receiver (SGR-10 with 12 channels), transputer, and DSP/DTE (Digital Signal Processing/Data Transfer Experiment) unit. The three cameras and 3 reaction wheels are accommodated in the Earth Observation Compartment. Two GPS antennas are accommodated on the space facing side of the S/C..
Attitude control | Magnetorquer-assisted gravity gradient, 3-axis reaction wheels and 3 magnetorquers | ±0.3º roll/pitch, nadir pointing |
Solar panels | GaAs, about 35 W/panel (BOL) | Four fixed body-mounted panels |
Batteries | 7 Ah NiCd |
|
OBC | 80C186+16 MByte, 80C386+64 MByte | Primary and secondary OBC |
Onboard data | 9.6 kbit/s serial bus; | Single network |
Communication links | 9.6 kbit/s VHF uplink | 3 single channel RCV, 2 synthesized RCV |
The spacecraft is three-axis stabilized using a combination of passive (gravity-gradient boom) and active (magnetorquers, reaction wheels) actuator elements. The platform, referred to as MicroSat-70, is nadir pointing. Attitude is sensed by sun sensors and a magnetometer. The body-pointing platform has the capability to perform fast slew maneuvers within ±15º about the roll axis (or ±180º about the yaw axis). An off-nadir pointing configuration can be sustained for up to half an orbit. Onboard data handling is provided with a dual CAN (Controller Area Network) bus (ISO 11898 & ISO 11519-1) 20 Mbit/s, and INMOS serial point-to-point link 9.6 kbit/s asynchronous duplex UART (Universal Asynchronous Receiver/Transmitter).
Launch
Tsinghua-1, along with SNAP-1 of SSTL was launched on June 28, 2000. Both spacecraft were secondary payloads to Nadezhda-6, the prime Russian SARSAT (Search & Rescue Satellite) of COSPAS. The launch vehicle was the Russian Cosmos-3M launcher and the launch site the Plesetsk Cosmodrome, Russia. 7)
Orbit
Sun-synchronous circular orbit, altitude = 700 km, inclination = 98º, period of 100 minutes.
Status of Tsinghua-1 Mission
• The Tsinghua-1 spacecraft ceased to be operational on Dec. 26, 2002 providing mission operations for 900 days. The primary failure was most likely a breakdown of the battery cells as analyzed by the housekeeping data. The temperature of the cells was exceedingly high that might have caused the damage to the battery system. 8) 9)
• From launch to the end of the mission the microsatellite was controlled by the Tsinghua ground station located at Tsinghua University. During the operational period, a lot of testing and experimentation were done, including 3-axis stabilized control experiments, GPS testing based on commercial components in orbit, data transfer, etc. More than 1200 images were taken, and over 11,000 telemetry files and 850 MByte telemetry data were downloaded, including subsystem status data, power, temperature, attitude sensor output, tele-commands, etc.
For the first satellite of a Chinese university, a lot of engineering and educational experience could be obtained from all phases project life: this included in particular the cooperative nature of spacecraft development as well as on-orbit operations.
• Rendezvous experiment of Tsinghua-1 with the SNAP nanosatellite of SSTL: 10) 11)
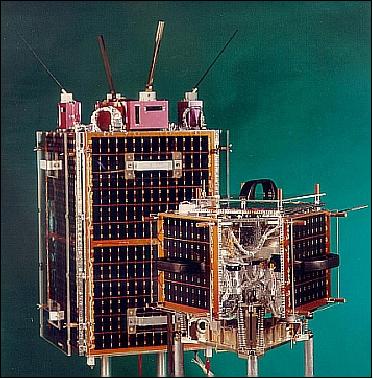
The dual launch of Tsinghua-1 and SNAP permitted a rendezvous experiment where the SNAP satellite (6.5 kg) could use its propulsive capability to catch up with the Chinese microsatellite, Tsinghua-1, and image it from close proximity using its novel CMOS based vision system.
Shortly after separation, the SNAP vision system automatically imaged the launcher and Tsinghua-1 microsatellite, which was still attached.
SNAP-1 and Tsinghua-1 were both released from the Cosmos launcher in slightly different directions specifically to avoid the possibility of accidental re-contact. SNAP-1 ended up in an orbit about 2 km below that of Tsinghua-1 and, being relatively light (6.5kg), suffered more from the effects of atmospheric drag than the much heavier (50 kg) Tsinghua-1 microsatellite. This meant that, relative to Tsinghua-1, SNAP-1 dropped in altitude more quickly. This was exacerbated by a very active sun (at solar maximum), causing the atmospheric density at 700 km to be higher than normal. SSTL measurements showed that on average, SNAP-1 was falling about 10 m per day with respect to Tsinghua-1. 12) 13)
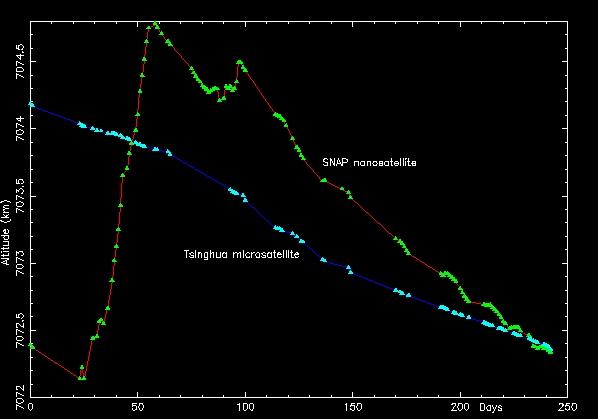
Thus, the SNAP-1 MPS (Micropropulsion System) was used firstly to demonstrate orbit control (the primary objective) by maintaining its altitude by overcoming the relative atmospheric drag effects, and then also to climb back up to an altitude about 1 km higher than that of Tsinghua-1. Most of the propellent was used for this climb in December 2000. In this period Tsinghua-1 separated from SNAP-1 by more than 10,000 km along their orbital tracks. - A long sequence of of thruster firings was initiated under the automatic control of the OBC, and the GPS navigation system was used to keep track of the orbital changes. Over a period of 30 days, the thruster was fired about four times per day, giving a change in velocity (delta v) of about 10 cm/s per day. Once SNAP-1 was higher than Tsinghua-1, the along-track gap began to close. In January 2001, SNAP-1 was about 300 m higher than Tsinghua-1 with the gap closing. In total, the propulsion system raised the altitude of SNAP-1 by about 4 km ( corresponding to a total delta v of 2.1 m/s), all done with just 32.6 grams of butane propellant.
At maximum separation, Tsinghua-1 and SNAP-1 were about 15,000 km apart. But by means of the propulsion maneuvers, SNAP-1 brought itself to within 2000 km of its target. Thus, while a true rendezvous was not achieved, the agility and maneuverability of SNAP-1 under automatic control was amply demonstrated, meeting its objectives of demonstrating that nanosatellites can be constructed rapidly to achieve sophisticated mission requirements. 14)
Sensor Complement
MEIS (Multispectral Earth Imaging System)
MEIS is a demonstrator instrument intended for the upcoming DMC (Disaster Monitoring Constellation) mission. The objective is to acquire multispectral Earth surface imagery with a spatial resolution of 40 m (snapshot imagery). The MEIS camera assembly consists of three cameras (one for each spectral band) mounted at an angle of 15º from nadir so that the yaw angle can be selected to offer the required off-pointing angle of ±15º from nadir. The image swath width is 80 km and each camera can collect four images contiguously along the flight path. The instrument performs autonomous onboard histogram analysis to ensure optimum image quality involving image processing, compression and onboard storage. The OBCs may also be used to carry out autonomous onboard cloud editing and high-compression thumb-nail image previews.
Imaging detector array | 1024 x 1024 pixels, Kodak KAI-1001 non-interlaced sensor |
Optics | Color-corrected Nikon lenses with 150 mm aperture |
GSD (Ground Sampling Distance) | 39 m x 39 m (resolution at nadir) |
Swath width | 80 km, [FOR (Field of Regard) of 400 km or more] |
Spectral bands (selectable in μm) | 0.52 - 0.60 (green), 0.63 - 0.69 (red)) 0.76 - 0.94 (NIR) |
Exposure control | Electronic integration time & gain (1000:1) |
Radiometric resolution | 8 bit - video digitization is synchronized with pixel stream producing 8-bit quantization (9 bit linearity) |
SNR | > 35 dB at 100% (about 2000:1) |
Image raw data size | 1 MByte per spectral band and per frame |
Image compression | Scene-dependent compression ratios of 3:1 to 5:1 using AMPBTC (Adaptive Moment-Preserving Block Truncation Coding) |
Onboard processing | 2 x T805 20 MHz Transputers + 32 MByte SRAM |
Onboard data storage | Up to 150 compressed multispectral images |
SGR-10 (Space GPS Receiver-10)
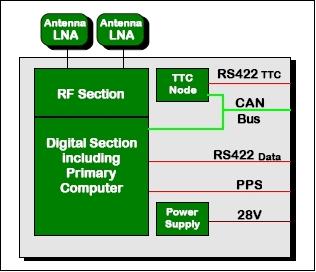
The objective is real-time positioning for tracking the satellite and providing orbital elements for the spacecraft mission and ground station. SGR is a customized COTS-developed receiver. The instrument is based on the second generation GPS chip set of MITEL Semiconductors. The SGR consists of the following elements: GPS antennas, LNAs, the RF section, the digital section and the TLM/TC node. 15) 16) 17)
• RF section: The SGR has two separate RF front-ends in the RF section which are responsible for down-converting the GPS signals and digitizing the IF signals. The RF sections use the same local oscillator so that the measurements are referenced to the same fundamental TCXO clock.
• Digital section: This part consists of hardware correlator channels, memory, a 32 bit RISC microprocessor with supporting peripherals and the interface circuitry. There are 24 C/A code correlation channels available, although only 12 channels are available if only 2 antennas are used.
• TLM/TC node: A separate 8 bit microcontroller is used to provide telemetry and telecommands. The telemetry includes status monitoring of SGR, while telecommand include reset, power down parts of the receiver, some redundancy switching etc.
The SGR-10 receives the L1 signal from the GPS constellation. The total SGR mass is 1.355 kg, including antenna/LNA. The accuracy of positioning, velocity and time synchronization (under Selective Availability on GPS) are: 150 m, 1 m/s, 3-D location ( 2σ), and ± 1 µs, respectively.
References
1) You Zheng, Gong Ke, M. Sweeting, “Tsinghua Micro/Nanosatellite research and its application,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Aug. 23-26, 1999, Logan UT, SSC99-IX-3
2) You Zheng. M. Sweeting, “Initial Mission Status Analysis of 3-axis stable Tsinghua-1 Microsatellite,” Proceedings of the 14th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 21-24, 2000
3) Y. Zheng, K. Gong, X. Zhang, M. Sweeting, “3-axis Stable Hangtian-Tsinghua-1 Microsatellite,” 52nd IAC, Oct. 1-5, 2001, Toulouse, France, IAA-01-IAA.11.3.08
4) You Zheng, Gong Ke, T. Butlin, W. Sun, M. N. Sweeting, “Tsinghua-1 Microsatellite - Demonstration of EO and Disaster Monitoring Network,” Proceedings of the International Symposium on Digital Earth (ISDE), Beijing, China, Nov. 29 - Dec. 2, 1999
5) M. N. Sweeting, “Nano- & Micro-Satellites: For Space Training,” 4th IAA Symposium, Berlin, Germany, April 7-11, 2003, IAA-B3-0908P, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv3/0908P.pdf
6) Guo Huadong, Wang Changlin, “Building up national Earth observing system in China,” International Journal of Applied Earth Observation and Geoinformation, Volume 6, Issues 3-4, March 2005, pp. 167-176
7) “China Microsat Performs Well; Nanosat Is Next,” Aug. 22, 2000, Spacedaily, URL: http://www.spacedaily.com/reports/China_Microsat_Performs_Well_Nanosat_Is_Next.html
8) Li Luming, Hu Long, Wu Zhifei, Chen Jinshu, “Temperature environment of battery pack on Hangtian-Tsinghua-1 microsatellite,” Proceedings of the 4S Symposium: Small Satellites, Systems and Services, La Rochelle, France, Sept. 20-24, 2004
9) Information provided by Audrey Nice of SSTL
10) “The SNAP/Tsinghua RendezVous Experiment,” URL: http://www.ee.surrey.ac.uk/SSC/research/astrodynamics/rendezvous
11) W. H. Steyn, Y. Hashida, “In-Orbit Attitude Performance of the 3-Axis Stabilized SNAP-1 Nanosatellite,” Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 13-16, 2001, SSC01-V-1, URL: http://staff.ee.sun.ac.za/whsteyn/Papers/USU2001_Snap2.pdf
12) Information provided by Craig Underwood and by Dave Gibbon of SSTL, Surrey, UK
13) “Surrey's SNAP-1 Nanosatellite Snaps Satellites in Orbit,” URL: http://www.surrey.ac.uk/news/releases/10-0100sstl.html
14) C. Underwood, V. Lappas, A. da Silva Curiel, M. Unwin, A. Baker, M. Sweeting, “Science Mission Scenarios using PalmSat Picosatellite Technology,” Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 9-12, 2004, SSC04-VIII-3
15) M. J. Unwin, M. K. Oldfield, “The design and operation of a COTS Space GPS Receiver,” 2000, AAS 00-046, URL: https://www.researchgate.net/publication/228854740_The_design_and_operation_of_a_COTS_space_GPS_receiver
16) M. J. Unwin, P. L. Palmer, Y. Hashida, C. I. Underwood, “The SNAP-1 and Tsinghua-1 GPS Formation Flying Experiment,” ION GPS 2000, Salt Lake City, Sept. 19-22, 2000
17) H. Zhang, M. Unwin, ”The Use of GPS Receiver on Tsinghua-1 Microsatellite,” Proceedings of the International Symposium on Digital Earth (ISDE), Beijing, China, Nov. 29 - Dec. 2, 1999
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).