UoSAT-12
EO
ESA
Mission complete
Quick facts
Overview
| Mission type | EO |
| Agency | ESA |
| Mission status | Mission complete |
| Launch date | 21 Apr 1999 |
| End of life date | 21 Sep 2003 |
| CEOS EO Handbook | See UoSAT-12 summary |
UoSAT-12
UoSAT-12 is an SSTL (Surrey Satellite Technology Ltd.) funded and developed proof-of-concept (technology) mission in low-cost minisatellite engineering techniques. Invited collaborative payloads are from NTU (Nanyang Technological University) in Singapore and from ESA. The design of a new standard minisatellite platform, MiniBus, started in 1996 (also referred to as MiniSat-400 platform). The objective is to demonstrate and qualify the new MiniBus platform to fly an Earth observation package and to qualify new technology for flight on subsequent missions. 1) 2) 3)
The UoSAT-12 minisatellite is also referred to as OSCAR-36 (AMSAT designation in orbit). 4)
Spacecraft
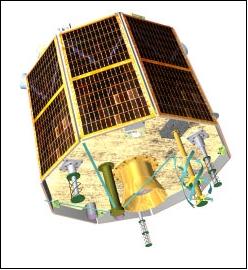
The MiniBus structure is essentially hexagonal with a height of about 1 m and a diameter of 0.6 m, supporting a payload mass in the range of 50 to 150 kg. Payloads can either be carried in one or more standard SSTL MiniBus modules in the Module Stacks, or in the large payload frame with aperture access to the Earth-facing facet. Payloads for Earth observation can be carried directly on the nadir pointing Earth frame, and space-facing payloads are accommodated on the zenith-facing facet. The thrust bearing column of the minibus consists of three stacks of Surrey's standard microsatellite module trays. The stacks (340 mm x 340 mm x 500 mm) are joined around a triangular central void and placed on a honeycomb panel of about 1.1 m diameter. 5) 6)

The OCS (Orbit Control and Determination System) comprises a GPS receiver, and a cold gas thruster system. Both are also an integral part of ADCS (Attitude Control and Determination System). The ADCS actuators include: two Surrey developed reaction wheels, one Ithaco momentum wheel, cold-gas reaction jets, magnetorquers, and a gravity gradient boom. The sensors include: three three-axis magnetometers, four two-axis analog sun sensors, a GPS receiver, SGR-20 (Space GNSS Receiver-20), and two star cameras, a Servo Earth sensor and an Ultra magnetometer and a solid-state gyro. The three-axis control system maintains Earth pointing to an accuracy of 0.5º, with an experimental target of 0.1º, for Earth observation payloads and communication antennas. The ADCS can be operated in momentum-biased mode, zero momentum mode, or in gravity-gradient mode (for EOL mission extension). ADCS and OCS are supported by an attitude control processor, which can be run on any of the four primary onboard processors. Additionally, UoSAT-12 carries an electric propulsion system, a 90 W resistojet producing 93 mN of thrust, which uses nitrous oxide as its working fluid. 7) 8) 9)
Parameter | Manufacturer | Quantity | Type | Range | Accuracy | Power |
Magnetometer | SSTL(2), Ultra (1) | 3 units | Flux gate | ±60 µTesla | 30 nT (3σ) | < 0.8 W |
Sun sensors | SSTL | 4 x 2 axis | slit & photo cell | ±50º | 0.2º (3σ) | < 0.1 W |
Horizon sensor | Servo-MIDES, SSTL I/F | 1 x 2 axis | IR pyro array & chopper | ±5.5º | 0.06º (3σ) | 2.8 W |
Star sensor | SSTL | 2 units | CCD matrix | 14.4º x 19.2º +1.0-6.0 mv | 0.02º (3σ) | 4 W |
Rate gyro | BEI, SSTL I/F | 1 unit | Gyro chip | ±5º/s | 0.02º/s | 1.4 W |
GPS receiver | SSTL | 1 unit | MITEL chip set | 24 channels | 50 m (1σ) | 5-7 W |
Parameter | Magnetorquers | Reaction/Momentum Wheels | Propulsion System |
Manufacturer | SSTL | SSTL (2), Ithaco (1) | SSTL & Polyflex |
Quantity | 8 x PCB, 4 x Wire coils | 3 units, (x/y/z) | 10 x N2 CG thrusters |
Type | Air core | Brushless DC motor | 4 bar cold gas |
Operation range | x/y = ±14.2 Am2 | ±4 Nms @ ±5000 rpm | 0.125 N (R-jet) |
Power | 20 W max (80% duty cycle) | 2.8-14.6 W (zero to max acceleration) | 3 W (CG) |
Operation | PWM controlled | Speed controlled | PWM controlled |
Accuracy | 20 ms min pulse | ± 1 rpm | >10 ms pulse (CG) |
The power system for UoSat-12 comprises a set of nine body-mounted solar panels (note: the design can allow for deployed solar panels depending on the mission) and battery charge regulators, three 6Ah battery packs, a centralized power switching system, and a distributed power conditioning system. Power is distributed and switched via an unregulated 28V bus. The solar panels employ highly efficient GaAs cells, supplying an orbit average power of 150 W to the platform. Panels are deployed at an angle depending on the orbit and power profile required for the mission. In order to provide prolonged battery cycle life, NiCd cells are used in the 18Ah battery.
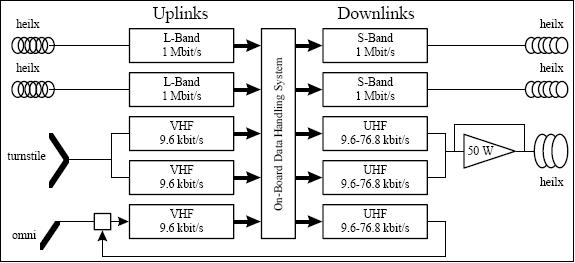
RF Communications: UoSAT-12 carries five uplink receivers. Three are 9.6 kbit/s FSK channels in the VHF-band. Two are L-band receivers integrated in the Merlion 1 Mbit/s transponder. The communication system employs VHF and UHF uplinks and downlinks for standard telemetry and telecommand. These also provide the standard S&F (Store and Forward) digital transponder service. An S-band 1Mbit/s downlink supports payloads that generate large amounts of data, such as Earth Observation payloads (switchable to any data rate between the range 1 Mbit/s - 64 kbit/s). The three UHF downlinks support 9.6 and 38.4 kbit/s with CPFSK modulation. The dual redundant S-band downlink provides 1Mbit/s BPSK modulation, with optional Viterbi encoding.
Telemetry and telecommand is implemented as a distributed system based on a microcontroller with ISO-11898 CAN (Controlled Area Network) support. Each payload and bus system contains one or more nodes, each of which is implemented using a CAN microcontroller. The network is dual redundant and DC isolated. The TT&C master is implemented in software, and its function is to collect, format and downlink telemetry and issue telecommands, either direct or programmed. The TT&C master would nominally be the primary onboard-computer, however this architecture allows any other computer, and indeed any of the nodes to perform this function.

Launch
UoSAT-12 was launched April 21, 1999 by a Russian launcher, Dnepr, of Kosmotras International Space Co., Moscow, from the Baikonur Cosmodrome, Kazakhstan. S/C mass = 325 kg.
The launch represented the first commercial mission for the former Soviet Union's arsenal of SS-18 Satan missiles (all of which have to be destroyed or used for peaceful purposes under the START arms reduction treaty). The Dnepr vehicle was created in 1997 under an agreement between the Russian and Ukrainian space agencies. 10)
In May 2009, SSTL and ISC Kosmotras were celebrating 10 years of successful cooperation. 11)
Orbit: Near-circular non-sun-synchronous orbit, altitude = 650 km, inclination = 64.57º, period = 97.8 min.
Mission Status
• The UoSat-12 provided over 4 years of service life. Spacecraft operations ceased on Sept. 21. 2003. All fuels were expended prior to this to reduce the orbital lifetime. The gravity gradient boom was also deployed at this time to increase drag and therefore reduce orbital lifetime. 12)
• On January 25, 2001, the UoSat-12 spacecraft became the world's first web server in space (HTTP was used to transfer real-time telemetry and stored image data directly to the user). The demonstration was carried out by the OMNI Lab of NASA/GSFC. (see description below).
• A year in orbit in 2000, UoSat-12 has demonstrated some key technologies for furthering small satellite Earth observation capability (Ref. 7) :
- The new minisatellite platform, capable of offering more power, mass and volume to payloads and sub-systems
- High resolution imagers: the 10 m panchromatic and 36 m multispectral imagers having increased SSTL mission performance and provided invaluable experience in dealing with more sophisticated payloads
- Full 3-axis control and off-pointing capability has increased performance, revisit rates. The ADCS is also suitable for missions using high resolution pushbroom imagers
- On-board orbit control: SSTL’s own GPS receiver, resistojet, cold gas propulsion system and software have been qualified
- Orbit maneuvering, orbit maintenance (including autonomous orbit control) and orbit determination capability necessary for constellations.
• The UoSAT-12 (SSTL) Internet demonstration was carried out in the time frame April-June 2000 within the OMNI (Operating Missions as Nodes on the Internet) project of NASA/GSFC. UoSat-12 was the first civil satellite to have an Internet address (IP address). 13)
• In January 2000, UoSat-12 imaged a lunar eclipse. 14)
• The first image of the SHC (Surrey High-resolution panchromatic Camera) device was taken on April 28, 1999 over Texas.
Sensor Complement
The payload imaging systems include high-performance processor modules to provide autonomous image assessment and compression. The processing units are based on the Inmos T805 transputer and are an integral part to the operation of the imaging instruments (they manage all aspects of of the imagers including scheduling, image capture, analysis preprocessing and compression). The compression algorithm used is AMPBTC (Adaptive Moment-Preserving Block Truncation Coding), achieving compression ratios up to 4:1. Although the compression is relatively modest, the AMPBTC routine preserves fine detail more faithfully than for instance JPEG.
Camera | Spectral Band | Orbit | Mean Resolution | Coverage (Image Size) |
WAC | 810-890 nm | 650 km | 975 m | 1000 x 1000 km |
SHC | Panchromatic | 650 km | 10 m | 10 x 10 km |
MSI-0 | Bands 1,2,3,4 & 8 | 650 km | 32.5 m | 33 x 33 km |
MSI-1 | Bands 1,2,3,4 & 8 | 650 km | 32.5 m | 33 x 33 km |
Star0 | 400-1000 nm | 650 km | 0.02º | 20º x 15º (FOV) |
Star1 | 400-1000 nm | 650 km | 0.02º | 20º x 15º (FOV) |
WAC (Wide Angle Camera)
The instrument is of UoSAT-5 and PoSAT-1 heritage under the name of EIS (Earth Imaging System) - however, with a 1 Mpixel detector size. An extremely wide angle lens is used (4.8 mm focal length) to offer wide coverage. The camera is fitted with an optical filter giving NIR sensitivity and providing strong contrast between land, sea and cloud. The WAC instrument often serves as a spotter camera to assist in locating scenery from the other cameras.
SHC (Surrey High-resolution panchromatic Camera)
SHC uses COTS (Commercial Off-The-Shelf) components. The panchromatic instrument features a Kodak-built silicon CCD detector of size: 1024 x 1024 pixels and a Leica lens with an aperture of 560 mm (f/8). The footprint is 10 km x 10 km per image (step-and stare operation of a 2-D detector array). The camera can also be programmed to capture a sequence of images, thus allowing long swaths of imagery to be collected. The mass of SHC is 10 kg.

The SHC has proven to be remarkably successful. However, due to the non-sunsynchronous orbit of the UoSAT-12 spacecraft, wide temperature excursions were experienced causing periodic variations in focus of the 10 m panchromatic camera.
MSI (Multispectral Imager)
There are two MSI instruments (MSI-0 and MSI-1) onboard working in tandem and angled in the cross-track direction (3º) to provide a combined coverage of 60 km (cross-track) x 30 km (along-track). Each imager has a 2-D CCD silicon detector of size 1024 x 1024 pixels and a lens of 180 mm aperture (f/3.4). The spatial resolution is 32.5 m. The MSI instruments use rotating filter wheels to image in four spectral bands (0.45 - 0.52; 0.52 - 0.60; 0.63 - 0.69; and 0.76 - 0.90 µm), identical to bands 1-4 of Landsat's TM (Thematic Mapper). The transputer support of MSI makes it possible to image contiguous swaths or to support step-and-stare observations. The mass of each MSI instrument is 3 kg.

Although the multispectral cameras have performed remarkably well, one consequence of the rotating filter wheel design is that the various multispectral images need to be aligned due to time differences between each image capture. A 360 millisecond delay between spectral frames results in displacements of 2.5 km and aligning several frames can be a labor-intensive process.
Technology Demonstrations
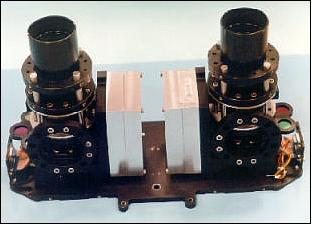
Star Cameras (Star0 and Star1)
There are two star cameras aboard acting as precision attitude sensors. The FOV of one camera is 20º x 15º to ensure coverage of enough stars, the other camera has a FOV of 10º x 7º providing a fine resolution. The optics for the star cameras are: f/0.85 25 mm and f/1.0 50 mm, respectively. Both cameras use CCD detectors. In order to operate under very low light conditions, such techniques as long integration times (up to a second), reduced output noise bandwidth, a non-linear transfer function, and low-noise amplification are used to obtain usable signals from faint stars.
The spacecraft imagers have been performing well, their success has been the return of high quality 10m resolution panchromatic and 32m multispectral images from orbit demonstrating “a breakthrough in the order of magnitude reduction in cost for high resolution space imagery.”
SGR (Space GPS Receiver)
SGR-20 is an ESA-funded instrument in partnership with SSTL. The objective is to provide an experimental test-bed for GPS orbit and attitude determination. The SSTL design uses a MITEL chip set and an ARM60 RISC processor (32 bit). Radiation tolerance is implemented through an EDAC (Error Detection And Correction) memory and a latch-up protected power switch. SGR is a 24-channel instrument, it features five GPS antennas, four of which can be used simultaneously to track GPS signals. The carrier phase of L1 signals are observed at each of the four antennas. One antenna is sufficient for orbit determination. With the signals from the multiple antennas it is possible to determine the S/C attitude by measuring phase differences and applying interferometric techniques. 15) 16) 17) 18) 19) 20)
Autonomous Orbit Control Demonstration
The OCS (Orbit Control and Determination System), mentioned earlier in the text under “spacecraft”, is also referred to as OCK (Orbit Control Kit), a software package of Microcosm Inc. (with AFRL funding) which was flight tested on UoSat-12. OCK represents the first on-orbit demonstration of autonomous, on-board in-track and cross-track orbit control. The OCK software resides on a customized 386 onboard computer, developed by SSTL, with their attitude determination and control system software. The inputs for OCK are generated by the SSTL-built 12-channel L1-code GPS receiver (SSTL model SGR-20) with an output frequency of 1 Hz. 21)
The OCK approach employs absolute control rather than relative control. Absolute orbit control maintains each satellite in a “box” which will keep a predictable, regular position relative to users on the ground and will keep the satellite orbit from decaying.
In Sept. 2000, OCK operated continuously for 29 days and demonstrated accurate autonomous in-track orbit control under the adverse conditions of long GPS outages and an initial halving of thrust followed by a return to full thrust midway into the run. 22)
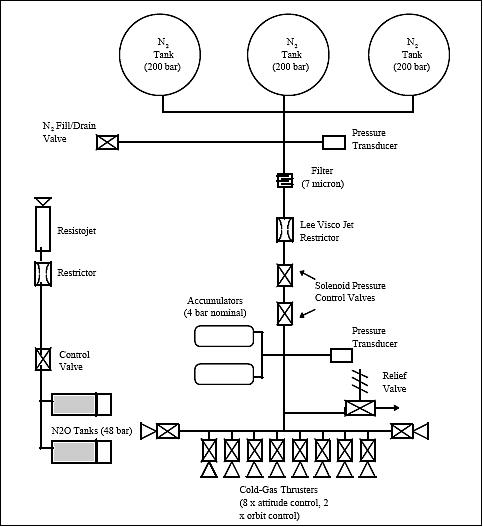
Propulsion Systems
UoSat-12 incorporated two separate propulsion systems, a compressed nitrogen cold gas system and a nitrous oxide resistojet system. The combined ΔV afforded to the UoSat-12 mission is 26.8 m/s (16.4 m/s from the N2 cold gas, 10.4 m/s from the N2O resistojet). 23) 24)
• The N2 cold gas system is used for attitude control and velocity change whereas, the resistojet is a technology demonstrator primarily used for velocity change. After initial checkout and experimentation, the N2 cold gas propulsion system is being configured to operate in an experimental autonomous mode via software developed by the Microcosm corporation.
• EPS (Electric Propulsion System). EPS is an experimental resistojet electric propulsion system developed at SSC (Surrey Space Center). Water on nitrous oxide is super-heated over a resistive heater element, the resulting hot gas is expelled through a nozzle to produce low-level thrust at moderate specific impulse. The thruster provides a thrust of 93 mN, using 90 W of input power, the Isp is 1250 m/s. A total ΔV of 10.4 m/s is provided by a 2-liter tank of self-pressurized nitrous oxide.

Merlion Communications Package
The Merlion Communications Package of NTU (Nanyang Technological University), Singapore is developed in cooperation with SSTL. The objective is to demonstrate a new communications technology (radio amateur L/S-band transponder) for LEO systems to improve coverage in particular for equatorial regions. A later constellation of several suitably phased satellites in such an orbit can provide continuous coverage for the lower latitude regions. The use of L-band and S-band amateur frequencies is to stimulate more extensive use of these bands (by experimenting with various access schemes and operating modes). A ground station at NTU is testing these schemes. The payload combines an analog and digital regenerative transponder with L-band uplink and S-band downlink. 25) 26)
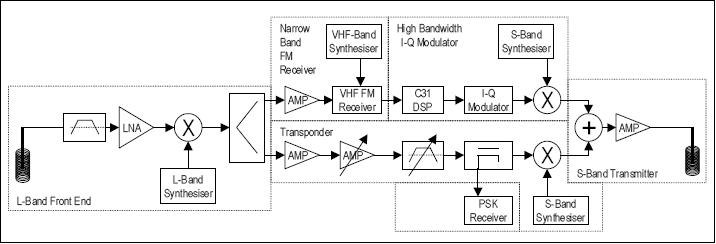
Downlink: The frequency-agile digital S-band downlink is used for high-speed data transfer and performs a variety of communication experiments. It is capable of low rate spread spectrum communications, and has Viterbi coding options to investigate its performance in the highly dynamic LEO environment. The downlink is also used to perform link characterization at these frequencies. The modulation scheme is NRZ-L/BPSK at 256 kbit/s, 512 kbit/s and 1 Mbit/s with square root raised cosine shaping. The data is processed via various scramblers and encoders. Data is scrambled using a standard V.35 scrambler, or via a programmable 32-bit universal scrambler. A 1/2 rate Viterbi encoder (k=7, G1=171, G2=133) is also included, and a spread spectrum mode permits experimentation with lower data rates for smaller ground stations while keeping the chip rate at 1Mbit/s. The downlink power is 7W.
Uplink: The digital uplink consists of a frequency-agile L-band 9600 bit/s FSK receiver. Both IF outputs and baseband outputs are presented to a TI C31 Digital Signal Processor, for modulation and coding experiments. The frequency scanning functions and variable bandwidth IF filtering permit the receiver to be used in conjunction with the DSP for narrow band channel characterization and transponder measurements. In conjunction with the onboard-computers, the digital uplink and downlink system can be configured into a high rate S&F transponder.
The satellite antennas are shaped in such a way as to provide equal power flux density across the satellite footprint. Quadrifilar helices are employed with downlink LHCP and uplink RHCP.
Demonstration of Internet Access on UoSat-12
A demonstration of Internet access to flying LEO spacecraft was performed by SSTL (Surrey Satellite Technology Ltd.) using its UoSAT-12 minisatellite. The demonstrations consisted of uploading an IP (Internet Protocol) software stack to the UoSAT-12, including simple modifications to the SSTL ground station, and a series of tests to measure the performance of various Internet applications (UoSAT-12 was assigned an IP address). The UoSAT-12 S/C was reconfigured on-orbit. The initial tests included basic network connectivity (PING), automated clock synchronization with NTP (Network Time Protocol), and FTP (File Transfer Protocol) transfers. 27) 28) 29)
The UoSAT-12 (SSTL) Internet demonstration was carried out in the time frame April-June 2000 within the OMNI (Operating Missions as Nodes on the Internet) project of NASA/GSFC. The UoSAT-12 spacecraft was selected because of its ability to support the HDLC (High-Level Data Link Control) framing in hardware for link-level protocol on space-to-ground links. This allowed simple and straightforward interfacing with existing commercial routers. UoSAT-12 was an ideal test platform because it already used HDLC framing for its AX.25 (Amateur radio X.25) protocol. 30)
Follow-on work is to demonstrate the following functions and additional protocols: http file delivery, mobile IP, security, store-and-forward commanding, data delivery using SMTP (Simple Mail Transfer Protocol), and VPN (Virtual Private Network) to enable automated, operational S/C communication. The use of IP communications over a satellite link is also referred to as “IP in Space.” On January 25, 2001, the UoSat-12 spacecraft became the world's first web server in space (HTTP was used to transfer real-time telemetry and stored image data directly to the user). The demonstration was carried out by the OMNI Lab of NASA/GSFC. 31)
Overview of UoSat-12 Flight Test Schedule
• Operational code on spacecraft, ground system modified, data flowing April 2000
• Basic Connectivity Tests (PING) - Apr. 10, 2000 Test operation of IP over HDLC on UoSAT-12
• Automated Spacecraft Clock Sync (NTP) - Apr. 14, 2000
- End-to-end connectivity (UoSAT-12 to Naval Observatory)
- Validation of NTP operation in space
• Reliable File Transfer (FTP) - June 7, 2000
- Test FTP/TCP operation over UoSAT-12 space link
- Adjust TCP parameters for limitations of UoSAT-12
• Realtime Telemetry (UDP) - Nov - Dec 2000
- Rapid deployment (4 days) of Stanford receive-only ground station for UoSAT-12 support during Space Internet Workshop
• Web Browser Access (HTTP) - Jan. 25, 2001
- Retrieve data and monitor status using standard web browser
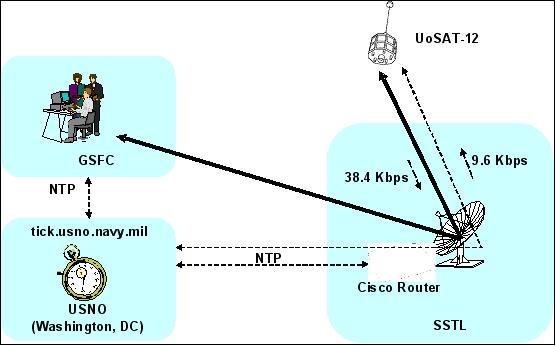
SSTL ground station implementation: Since the SSTL ground station already supported HDLC framing, a standard Internet router was the only addition needed. Figure 17 indicates the basic components of the ground station and where the router was added in parallel with the existing AX.25 communication front-end. The only station reconfiguration required was to select which system is connected to the transmitter. This was done with a controllable switch, supporting fully automated passes for either the IP or AX.25 mode.
The SSTL ground station is built on an Ethernet LAN with firewalls and router connectivity to the Internet. Two addresses were used on the ground station LAN to support these tests. One address was used for the Ethernet interface on the router and the other address was assigned to the spacecraft.

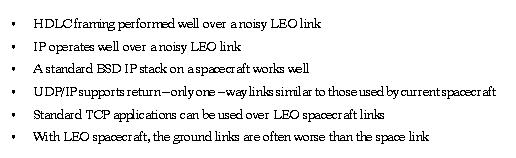
The OMNI project has successfully performed both ground-based and on-orbit validation tests of many of the concepts described. In particular, on-orbit testing of UDP telemetry delivery, NTP (operating over UDP) and FTP (operating over TCP) were successfully completed with UoSAT-12.
UoSAT-12 was the first known test of using standard Internet protocols to an orbiting spacecraft using standard off-the-shelf routers and commercial link layer protocols end-to-end. It successfully demonstrated the use of many standard Internet protocols and applications providing a wide range of data delivery options and automated spacecraft operations.
However, the UoSAT-12 tests did not cover all aspects of a full operational mission. It used a simple addressing mechanism where the spacecraft IP address was selected from the subnet at SSTL, which was the only ground station used. This was a normal routable address on the Internet, which meant that any packets addressed to the spacecraft would be routed to SSTL and then forwarded to the spacecraft. This approach worked fine for these tests but does not scale well to missions using multiple ground stations. Scaling for the general case will involve Mobile IP technology.
1) J. Ward, M. Sweeting, “First In-Orbit Results from the UoSAT-12 Minisatellite,” Proceedings of 13th Annual AIAA/USU Conferences on Small Satellites, Logan, Utah, Aug. 23-26, 1999, SSC-99-I-2
2) W. Sun, M. N. Sweeting, “In-Orbit Results from UoSAT-12 Earth Observation Minisatellite Mission,” Proceedings of the 3rd International Symposium of IAA, Berlin, April, 2-6, 2001, pp. 79-82., IAA-B3-0305P, URL: http://microsat.sm.bmstu.ru/e-library/Missions/Brief/Uosat/in-orbit_uosat.pdf
3) Martin Sweeting, “Microsatellites and nonosatellites, A brave new world,” URL: https://www.ingenia.org.uk/getattachment/a95e5fb2-5d2a-4159-9320-5fcd68fd2647/Sweeting.pdf
4) http://www.amsat.org/amsat-new/satellites/satInfo.php?satID=68
5) M. Fouquet, M. Sweeting, “UoSAT-12 Minisatellite for High Performance Earth Observation at Low Cost,” Acta Astronautica, Vol. 41, No. 3, pp. 173-182, 1997
6) “SSTL Small Satellites: Minisatellite Platform,” URL: http://microsat.sm.bmstu.ru/e-library/SSTL/Minisat.pdf
7) A. Wicks, A. da Silva-Curiel, J. Ward, M. Fouquet, “ Advancing Small Satellite Earth Observation: Operational Spacecraft, Planned Missions and Future Concepts,” Proceedings of the 14th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 21-24, 2000, SSC00-I-8, URL: http://www.smallsat.org/proceedings/14/tsi/i-8.pdf
8) W. H. Steyn, Y. Hashida, “In-Orbit Attitude and Orbit Control Commissioning of UoSAT-12,” 4th ESA International Conference on Spacecraft Guidance, Navigation and Control Systems, Oct. 18-21, 1999, pp. 95-101, ESA/ESTEC, Noordwijk, The Netherlands, (ESA SP-425, Feb. 2000)
9) “Minisatellite Reaction Wheel,” URL: http://centaur.sstl.co.uk/datasheets/Subsys%20MiniWheel%20HQ.pdf
10) Vladimir A. Andreev, Vladimir S. Mikhailov, Vladislav A. Solovey, Yuri N. Smagin, “Dnepr Program: Prospects and Advantages for Responsive Space,” 1st Responsive Space Conference, April 1–3, 2003, Redondo Beach, CA, USA, AIAA-LA Section/SSTC 2003-8003, URL: https://web.archive.org/web/20060515234702/http://www.responsivespace.com/Papers/RS1/SESSION8/SOLOVEY/8003P.pdf
11) “SSTL and ISC Kosmotras celebrate 10 year anniversary of first Dnepr launch,” SSTL, May 12, 2009, URL: https://web.archive.org/web/20090702164940/http://www.sstl.co.uk/news_and_events/latest_news?story=1382
12) Information provided by Chris Jackson of SSTL, Surrey, UK
13) “NASA Engineers Use Standard Internet Protocols To "Talk" With A Satellite,” Science Daily, May 3, 2000, URL: http://www.sciencedaily.com/releases/2000/05/000502185337.htm
14) “UK Satellite Captures Lunar Eclipse,” Space Daily, Jan. 10, 2000, URL: http://www.spacedaily.com/news/microsat-01b.html
15) S. Purivigraipong, M. J. Unwin, Y. Hashida, “Demonstrating GPS Attitude Determination from UoSat-12 Flight Data,” ION-2000, Salt Lake City, UT, Sept. 19-22, 2000, pp. 2625-2633
16) M. Unwin, P. Purivigraipong, A. da Silva Curiel, M. Sweeting, “Stand-alone spacecraft attitude determination using real flight GPS data from UoSAT-12,” Acta Astronautica, Vol. 51, Issues 1-9, July-November 2002, pp. 261-268
17) M. J. Unwin, M. K. Oldfield, S. Purivigraipong, “Orbital demonstration of a new space GPS receiver for orbit and Attitude Determination,” URL: [web source no longer available]
18) “SSTL SGR Series Space GPS Receiver,” URL: http://microsat.sm.bmstu.ru/e-library/SSTL/SGR.pdf
19) Martin Unwin, Rob Myatt, Scott Gleason, “The Use of Commercial GPS Technology in Space,” 2001, URL: http://centaur.sstl.co.uk/gps/Navtec01commercGPS.pdf
20) Martin J. Unwin, Michael K. Oldfield, “The Design and Operation of a COTS Space GPS Receiver,” AAS 00-046, URL: [web source no longer available]
21) J. R. Wertz, J. L. Cloots, J. T. Collins, S. D. Dawson, G. Gurevich, B. K. Sato, L. J. Hansen, “Autonomous Orbit Control: Initial Flight Results from UoSAT-12,” Proceedings of the 23rd Annual AAS Guidance and Control Conference, Breckenridge, CO, USA, Feb. 2-6, 2000, AAS 00-071, URL: http://www.smad.com/analysis/Autonomous_Orbit_Control6_d1.pdf
22) Gwynne Gurevich, Robert Bell, James R. Wertz, “Autonomous On-board Orbit Control: Flight Results and Applications,” AIAA 2000 Conference and Exposition, September 19 - 21, 2000, Long Beach, CA, USA, AIAA 2000-5226, URL: http://www.smad.com/analysis/A_AIAA_OCK_FINAL__9-18-00.pdf
23) Gary S. Haag, Martin N. Sweeting, Guy Richardson, “Low Cost Propulsion Development for Small Satellites at The Surrey Space Centre,” Proceedings of the 13th AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 23-26, 1999, SSC99-XII-2, URL: http://www.smallsat.org/proceedings/13/tech-xii/ts-xii-2.pdf
24) T. J. Lawrence, J. J. Sellers, J. W. Ward, M. Paul, “Results of low-cost electric propulsion system research for small satellite application,” URL: http://www.smallsat.org/proceedings/10/sess8/elecprop.pdf
25) Tai Wei Chua, R. A. .da Silva Curiel, et al., “Merlion L&S-band System,” Proceedings of 13th Annual AIAA/USU Conferences on Small Satellites, Logan, Utah, Aug. 23-26, 1999, SSC-99-I-1
26) E. S. Seumahu, M. J. Miller, “Possibilities for international collaboration in satellite communications constellations,” Proceedings of 1997 International Conference on Information, Communications and Signal Processing, 1997 (ICICS), Singapore, Vol. 1, Sept. 9-12, 1997 pp.432 - 434
27) J. Rash, R. Parise, K. Hogie, E. Criscuolo, J. Langston, C. Jackson, H. Price, “Internet Access to Spacecraft,” Proceedings of the 14th AIAA/USU Conference on Small Satellites, Logan UT, Aug. 21-24, 2000, SSC00-IX-1, URL: http://www.smallsat.org/proceedings/14/tsix/ix-1.pdf
28) Rick Schnurr, Ron Parise, Keith Hogie, Ed Criscuolo, John Wesdock, Mark Burns, “HDLC Link Framing for Future Space Missions,” SpaceOps 2002, Houston TX, USA, Oct. 9-12, 2002, URL: http://www.aiaa.org/spaceops2002archive/papers/SpaceOps02-P-T5-21.pdf
29) James Rash, Ron Parise, Keith Hogie, Ed Criscuolo, Jim Langston, “Internet Technology on Spacecraft,” Proceedings of the AIAA Space Conference and Exhibition, Long Beach, CA, Sept. 19-21, 2000, AIAA-2000-5295, URL: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.25.7021&rep=rep1&type=pdf
30) “NASA Turns On First Internet Node In Space,” Space Daily, May 5, 2000, URL: http://www.spacedaily.com/news/internet-00l.html
31) E. Criscuolo, K. Hogie, R. Parise, “Transport protocols and applications for Internet use in space,” Proceedings of IEEE Aerospace Conference, Big Sky, MT, USA, March 10-17, 2001
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)