WEOS (Whale Ecology Observation Satellite)
EO
Quick facts
Overview
| Mission type | EO |
| Launch date | 14 Dec 2002 |
WEOS (Whale Ecology Observation Satellite)
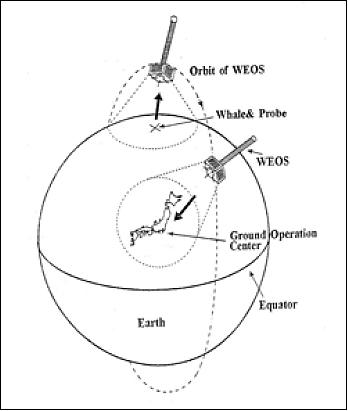
WEOS (Kanta-kun, in Japanese) is a data collection satellite, a low-cost mission designed, built and operated by students of the Chiba Institute of Technology (advisor and PI: Tomonao Hayashi), Chiba, Japan. The overall objective of WEOS is to collect signals sent from probes attached to whales in the oceanic region of Japan to study the behavior of whales (tracking of whale migration routes in the Pacific Ocean). The objectives in the total design of the system included:
• To find inexpensive electronic parts available to the public to create a small transmitter that would attach to the body of a whale
• To invent a device called a “whale generator” which would generate electricity through the movement of a propeller on a probe attached to the animal
• To determine a whale's location automatically using GPS together with Doppler Shift information coming from the whale and the earth station
• To devise a buoy or probe, driven by a harpoon, to attach to the whale without doing serious damage or causing discomfort. Harpoon testing was done on several dolphins in an aquarium to assure no harm would come to the whale.
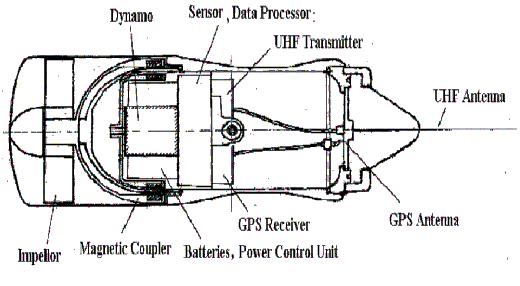
The ground segment probe, attached to a whale, consists of several sensors (GPS receiver for whale position, pressure for diving depth, temperature for sea environment), a data processing unit including a memory device, and an uplink transmitter in UHF band. Electric power for these instruments is supplied via Li-ion batteries charged with a dynamo driven by the motion of the whale in the sea. When the whale surfaces, the stored ecological data obtained by the probe are sent together with the identification code of the whale to the WEOS platform. 1) 2) 3) 4) 5)

Spacecraft
The structure of the microsatellite is a box of size 52 cm x 52 cm x 45 cm and a mass of 47 kg (50 kg with attachment ring). WEOS is gravity-gradient stabilized. The deployable gravity-gradient boom has a length of 3 m with a tip mass of 3 kg; it is pointing in the zenith direction to keep the antennas, facing the Earth-side of the spacecraft, in view of the ground segment. In addition, a 3-axis fluxgate magnetometer and a magnetic torquer are used for attitude sensing and control. A stabilization accuracy of ±10º is achieved. 6)
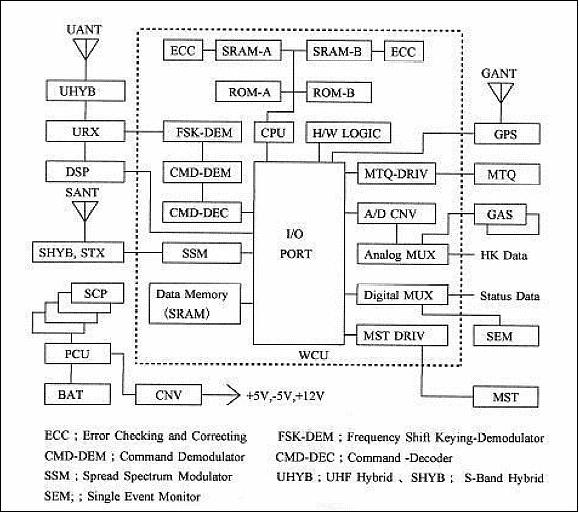
The GPS receiver of the spacecraft is mounted in the zenith direction. The WEOS subsystems consist of WCU (WEOS Central Processing Unit), an S-band transmitter, a UHF receiver, a DSP (Data Signal Processor) unit, a GPS receiver, NiCd batteries (4 Ah capacity), a power control unit, and a radiation monitor. WCU is the heart of WEOS, providing all onboard processing functions (telemetry/command data, data storage, and processing of house keeping and attitude control data). In addition, the functions of data collection from the ground segment are performed by WCU and DSP. Electric power is provided by surface-mounted solar cells (silicon crystal type, 14.5 W of average power).
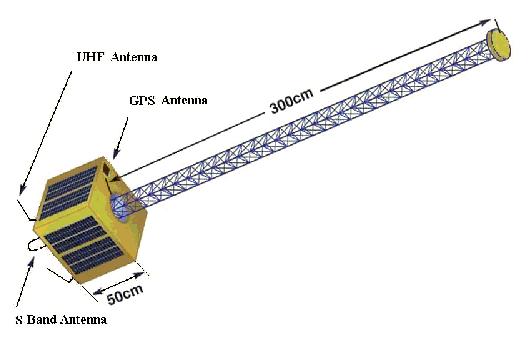
RF communications: 1) Data collection from the ground segment is in UHF, modulation: PCM (NRZ-S), convolution-BPSK, data rate of 300 bit/s. 2) The telemetry from WEOS to the ground station at Chiba is in S-band, modulation: PCM (NRZ-S), convolution, spread spectrum, the data rate is 1.2 kbit/s. 3) The uplink to WEOS is in UHF, modulation: PCM (NRZ-L), bi-phase-L, FSK; Antennas: cross dipole (S-band), sleeve dipole (UHF band). Satellite tracking and data collection are performed at the ground station of the Chiba Institute of Technology.
Launch
A launch of WEOS (JAXA provided), as a secondary payload to ADEOS-II on an H-IIA launch vehicle, took place on Dec. 14, 2002 from TNSC (Tanegashima Space Center), Japan. Other secondary payloads on this flight were: FedSat (Australia) and µ-LabSat (JAXA).
Orbit: Sun-synchronous near-circular orbit, 774 km x 812 km, inclination = 98.6º, period = 101 minutes.
On-orbit operation of WEOS: The performance of the WEOS is nominal. By controlling the current in the torquer coil, the rotation rate of 0.3 rpm, acquired at the separation from the launch vehicle, decreased to the rotation rate of 0.05 rpm in about 1 month after launch. WEOS established a gravity-gradient stabilization mode after deployment of the boom (3 m mast with a tip mass of 3 kg). The antennas onboard are pointing toward Earth. 7)
Mission Status
As of 2007, the WEOS spacecraft is working well, more than 4 years after launch. However, a problem to be solved remains with the attachment of a probe to a whale in the ground segment.
• Many attempts on the sea were conducted around Ogasawara Island and the Muroto District in Japan. Also, the project reviewed the strength of the cord material for connecting the probe, and a clamp mechanism for fixing the probe to the pin attached through these experiments. Further attachment attempts (onto a sperm whale) are being planned with the improved probe.
• Tracking of a buoy in the ocean: Since the probe could not be attached to a whale so far, the WEOS project floated a buoy in early Dec. 2004 to be able to operate a fully functional spacecraft and to study the global surface flow of the ocean current. All WEOS spacecraft operational functions such as attitude control, thermal control, communications, and power control are working nominally as well as the data collection function from the buoy (providing such parameters as position, ocean surface temperature, and GPS satellite data). 8)
• Tracking of a wild bear in the mountainous region of Japan (Honshu island) is another capability that has been added throughout the mission. Special probes were developed for this experiment.
• After S/C separation from the launcher and orbit insertion of WEOS, the spacecraft rotated initially at about 0.37 rpm. This spin rate was reduced to 0.05 rpm by controlling the electric current in a magnetic coil - using the attitude data of the magnetometer.
Localisation Experiment
The localization method of whales is based on the Doppler shift in the uplink signals received by the PLL (Phase-Lock Loop) receiver on the spacecraft (WEOS) whose orbit is known to a fairly accurate precision. The WEOS orbit is provided by an onboard GPS receiver. The trajectory of WEOS is traced every 10 s for about an hour providing an accuracy of about 30 m. Orbit determination uses the Keplerian elements of the satellite which are estimated from its locations measured by the onboard GPS receiver. In addition, orbit determination may use the TLE (Two Line Element) sets provided by NORAD (North American Aerospace Defense Command).
Doppler shifts can only be measured when a whale with a probe happens to be on the sea surface and when in addition the satellite happens to be over the coverage area of the tagged whales. Although a GPS receiver is installed on each probe, the staying time of the whale on the sea surface is sometimes too short to provide full lock of the GPS signals. 9) 10)
Probe Concept
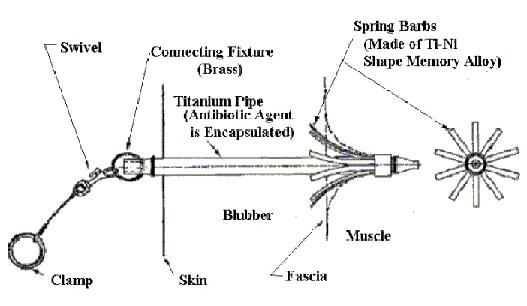
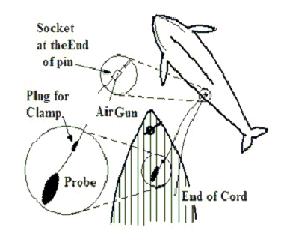
For attaching the probe to a whale, a pin with similar in length to the thickness of the whale's blubber is used, which is fixed with spring barbs made of shape memory alloy to the fascia. The pin is designed on an idea of minimal injury to the whale's body. The pin shaft consists of titanium, while a Ti-Ni shape alloy is used for the spring barbs to anchor in the whale's blubber at a sufficient depth. A probe is connected with a cord at the end of the pin. The pin is fixed to an air gun. A number of experiments were conducted to verify the penetration depths for a sufficient probe hold on a whale.
The probe can float by itself; it contains several sensors such as: a pressure gauge for measuring the diving depth, a thermometer for the sea temperature, and a GPS receiver for the position of the surfacing. The data obtained by these sensors are stored in the memory of the probe. When the whale surfaces, the data are being sent to the WEOS spacecraft in UHF band, along with the identification code of the whale. The electric power necessary for these processes is supplied from a Li-ion Batteries charged with a dynamo, which is driven by the motion of the whale in the sea.
1) T. Hayashi, K. Yokoyama, S. Hosokawa, H. Tomita, Y. Masumoto, “Cost Reducing Challenge and In-Orbit Results of Whale Ecology Observation Satellite(WEOS),” 4th IAA Symposium on Small Satellites for Earth Observation, April 7-11, 2003, Berlin, Germany, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-1301.pdf
2) T. Hayashi, Y. Okamoto, K. Yokoyama, S. Hosokawa, T. Takahashi, K. Nakazawa, T. Takashima, S. Watanabe, T. Hashimoto, M. Nomachi, Y. Masumoto, “Data Collection by Means of Formation Flight of Small Satellites with Gravity Gradient Attitude Stabilization,” Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.4.04
3) T. Hayashi, G. Etoh, Y. Masumoto, et al., “Whale Ecology Observation Satellite,” 9th AIAA/USU Conference on Small Satellites, Logan, UT, Sept.. 18-21, 1995
4) T. Hayashi, K. Yokoyama, S. Hosokawa, Y. Okamoto, T. Koizumi, E. Yauchi, “Tracking of a Buoy on the Ocean as an Application of the WEOS System,” Proceedings of the 2nd Asian Space Conference, Hanoi, Vietnam, Nov. 8-11, 2005
5) T.Hayashi, K.Yokoyama, S.Hosokawa, “Whale Ecology Observation Satellite (Kanta-kun) System,” Space Japan Review, No. 32, December 2003 / January 2004, URL: http://satcom.jp/English/eng12-1/smallsatelliteweose.pdf
6) Shigeru Hosokawa, Yoshinari Masumoto; Susumu Takezawa; Kazuhiko Haneji, “Damping Control by One-Axis Magnetic Torquer and Gravity Gradient Attitude Stabilization for Small Satellite,” Transactions of the Japan Soceity for Aeronautical and Space Sciences, Vol. 49, Issue 164, 2006, pp. 94-100
7) T. Hayashi, K. Yokoyama, S. Hosokawa , “Whale Ecology Observation Satellite (Kanta-kun) System,” Space Japan Review, No. 32, December 2003 / January 2004, URL: http://www2.nict.go.jp/mt/b150/SJR/English/eng12-1/smallsatelliteweose.pdf
8) T. Hayashi, Y. Okamoto, K. Yokoyama, S. Hosokawa, Y. Masumoto, “Two Years' Operation Results of Whale Ecology Observation Satellite,” Proceedings of the 5th IAA Symposium on Small Satellites for Earth Observation, April 4-8, 2005, Berlin, Germany, pp. 125-130, URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv5/1406P_Hayashi.pdf
9) Y. Okamoto, T. Hayashi, S. Hosokawa, K. Yokoyama, “An accurate satellite localization technique based on GPS for the sake of WEOS system,” URL: http://www.dlr.de/iaa.symp/Portaldata/49/Resources/dokumente/archiv4/IAA-B4-1307P.pdf
10) Y. Okamoto, T. Hayashi, S. Hosokawa, K. Yokoyama; “Positioning of the signal source based on the Doppler shift in uplink signals received by a satellite,” Proceedings of IAF, Oct. 4-8, 1999, Amsterdam, The Netherlands, IAF-99-B.4.05
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space)