WNISAT-1 (Weathernews Inc. Satellite-1)
EO
Multi-band UV/VIS Spectrometer (ACE)
Operational (extended)
VNIR
Quick facts
Overview
| Mission type | EO |
| Agency | Weathernews Inc. |
| Mission status | Operational (extended) |
| Launch date | 21 Nov 2013 |
| Instruments | Multi-band UV/VIS Spectrometer (ACE), VNIR |
| CEOS EO Handbook | See WNISAT-1 (Weathernews Inc. Satellite-1) summary |
WNISAT-1 (Weathernews Inc. Satellite-1)
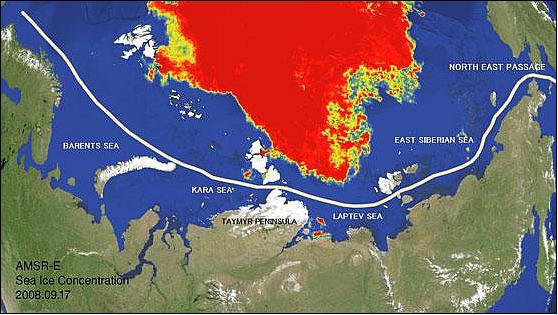
WNISAT-1 is a commercial Arctic Sea monitoring mission funded by Weathernews Inc. of Tokyo, Japan (the world's largest full-service weather company). The Company provides various business support services and disaster prevention services on the basis of weather predictions, to companies and municipalities in the fields of marine transportation, road, railway, air transportation, retail and distribution, agriculture, construction, communication, large-scale theme park and others.
The objective of the WNISAT-1 mission is to provide monitoring data to shipping line customers who are interested in the Arctic Sea ice state and the eventual use of the Arctic shipping routes which represent considerable savings over the established shipping routes.
Weathernews provided AXELSPACE a contract to design and develop the WNISAT-1 spacecraft. AXELSPACE is a university venture company of Tokyo, Japan, established in August 2008. All engineers have considerable experience in the field of small satellite design and development obtained through many projects of their respective universities. 1) 2) 3) 4) 5)
Currently, there are two major missions in the WNISAT program of Weathernews Inc.:
• An Earth imaging mission of commercial use and a challenging undertaking to provide ice coverage information over the high-latitude oceans in the VNIR (Visible Near Infrared) spectral ranges.
• An atmospheric monitoring mission for environmental applications. The spacecraft will measure the density of carbon dioxide (CO2) in the atmosphere using a laser instrument.
After WNISAT-1, planned for launch in 2012, a new enhanced model, named WNISAT-2, will be developed to provide a constellation service.
The basic requirements of the WNISAT-1 mission are:
- The observation region of the mission is seasonally different: The summer season calls for intensified observations in the northern latitude range of 70-80º, while the winter season observations will mostly be conducted in the northern latitude range of 40-50º.
- Wide area VNIR imagery (500 km x 500 km) with a spatial resolution of 500 m is needed to provide reliable and timely (frequent) information to the customer base. About 10 scenes/day are needed.
- Emit two kinds of lasers, wavelength of 1570 nm and 1556 nm, to measure the density of carbon dioxide (CO2) gas in the atmosphere.
Spacecraft
The design of the nanosatellite mission employs the following guiding principles to achieve a low-cost approach: a) use of a simple architecture, b) use of COTS (Commercial Off The Shelf) devices whenever possible, c) practical reliability of the spacecraft, d) compact design, e) simple operational support, and f) a minimum of redundancies are being implemented.
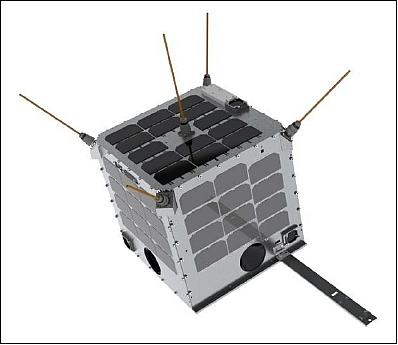
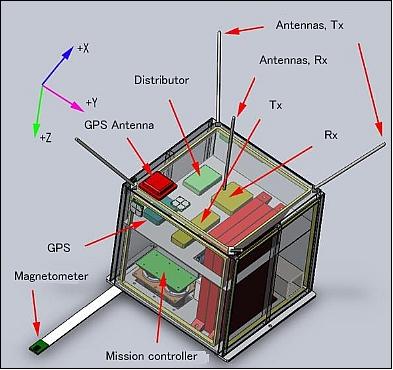
The spacecraft structure features a cubic shape of 27 cm sidelength, the launch mass is 10 kg, and an expected operational service life of 2 years.
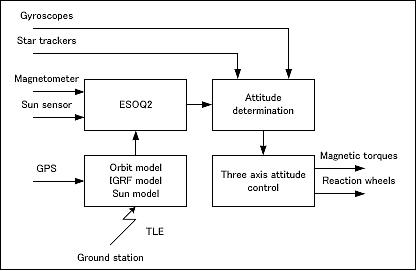
ADCS (Attitude Determination and Control Subsystem): Attitude pointing control is not a very stringing requirement of the imaging mission (due to the relatively large pixel size of 500 m). And in view of the limited resources available on a low cost nanosatellite, 3-axis stabilization (actuation) is provided by a deployable boom, a 3-axis magnetic torquer and an assembly of 4 reaction wheels (Astro und Feinwerktechnik). Attitude sensing is done by a 3-axis magnetometer, a 3-axis gyroscope, 4 sun sensors, 2 ST (Star Trackers).A GPS receiver is being used for orbital position information.
The star trackers were designed and developed by AXELSPACE; each ST has a mass of < 0.5 kg. The star trackers detect stars brighter than magnitude six, and compute the attitude compared with the data of star catalog. The two ST will be operated in a master-slave configuration where the master star tracker computes the averaging quaternion automatically with the data of slave star tracker. These averaging quaternions satisfy Whaba’s condition for optimal attitude determination. The star trackers have a FOV (Field of View) of 8º x 8º; they provide a pointing accuracy of 30 arcsec (3σ) in the yaw and pitch axis, and 0.2º (3σ) in the roll axis. The commercial version of the star tracker is referred to as AXELSTAR.
Processors: WNISAT uses an integrated architecture for the bus system to simplify the design. One OBC (On Board Computer) manages all peripheral instruments including the sensors and the actuators. In addition, a separate mission controller is installed for the bus system. This architecture provides flexibility (and backup) to the mission. From past experience, the PIC (Peripheral Interface Controller)has been selected for safety reasons. The PIC processor features a good behavior in fairly harsh radiation environments, it monitors also periodically the status of the OBC. With these operational attributes, the PIC processor resets the FPGA whenever a critical fault has occurred in the OBC. The reset can be performed automatically or manually, whatever the situation requires.
C&DH (Command & Data Handling) subsystem: The OBC uses an advanced commercial FPGA (Field Programmable Gate Array). This processor type is not radiation hardened, but several devices were examined internally many times with regard to SEU (Single Event Upset) and SEL (Single Event Latchup) behavior. Only the devices which successfully performed the tests were selected for the mission. The same test techniques were applied to all electronic devices. In addition to SEU and SEL effects, all electronic devices were tested for their TID (Total Ionizing Dose) behavior to make a mission life of two years in LEO (Low Earth Orbit) more achievable.
EPS (Electric Power Subsystem): Five sides of the nanosatellite are covered with surface-mounted solar cells. The two types of solar cells are being used for the electrical power generation. One is an improved triple junction cell with a conversion efficiency of 26.8%; the other is an ultra triple junction cell design with a conversion efficiency of 28.3%. The ultra triple junction cells are only used on the sun-facing -Z surface of the spacecraft. The +Z surface of the spacecraft is nominally nadir pointing.
The average power generated during the sunlit orbital phase is 12.6 W (without attitude control). The Li-ion battery has a capacity of 7700 mAh provided by 10-parallel sets of 1-series cells. The DOD (Depth of Discharge) is expected to be 17.9%. The charging circuit is a circuit of constant current/constant voltage charging. The unregulated voltages are converted using a DC/DC converter to the regulated +5 V, +3.3 V. Each power line has a fuse to protect the circuit from the overcurrent (against SEL).
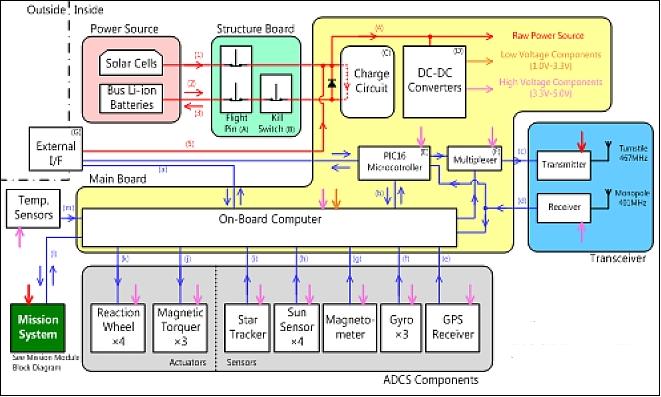
RF communications: The frequency of communications is UHF (400 MHz). There are 5 antennas for the communication service. Four antennas, installed on the – Z surface, are supporting the downlink transmission from the satellite, and 1 antenna is used for the receive function from the ground station to the satellite. This antenna design provides a stable communications function even in case the attitude control does not work properly, and minimizes the shadow effect to the solar cells. The main ground station will be operated by Weathernews Inc. at the Makuhari site in Japan. In addition, AXELSPACE supports the spacecraft operations using a different ground station.
Spacecraft bus structure: Aluminum is used for the bus panels. The installment of each device into the bus uses an optical measurement approach to align the instrument FOV (Field of View). In particular, the payload sensors are installed with error angles below 0.1º. The bus uses passive thermal control. Several devices and surfaces are treated with specified paints following a heat transfer simulation. In addition, the entire spacecraft structure was vibration tested to meet the required boundary conditions of the launch vehicle.
Spacecraft launch mass | 10.1 kg |
Spacecraft size | 27 cm x 27 cm x 27 cm (excluding the boom) |
Expected life time of mission | 2 years |
RF communications | UHF band frequency and GMSK modulation for data transmission |
On-board data storage volume | 2 GByte |
Electrical power generation | ~ 12.6 W (without attitude control) |
Spacecraft stabilization | 3-axis attitude control |
Attitude sensors | 3-axis magnetometer |
Attitude actuators | 3-axis magnetorquer |
Accuracy of attitude pointing | 30 arcsec (with ST) |
Accuracy of attitude control | Better than 0.1º (with reaction wheels) |

Launch
WNISAT-1 was launched on November 21, 2013 (07:10:11 UTC) on a Dnepr vehicle from the Dombarovsky (Yasny Cosmodrome) launch site in Russia. The launch provider was ISC Kosmotras. The primary spacecraft on this flight were DubaiSat-2 of EIAST, Dubai (~300 kg), and STSat-3 minisatellite of KARI, Korea (~150 kg). 6) 7) 8)
Secondary Payloads
The secondary payloads on this flight were:
• SkySat-1 of Skybox Imaging Inc., Mountain View, CA, USA, a commercial remote sensing microsatellite of ~100 kg.
• WNISat-1, a nanosatellite (10 kg) of Axelspace, Tokyo, Japan.
• BRITE-PL-1, a nanosatellite (7 kg) of SRC/PAS (Space Research Center/ Polish Academy of Sciences of Warsaw, Poland.
• AprizeSat-7 and AprizeSat-8, nanosatellites of AprizeSat, Argentina (SpaceQuest)
• UniSat-5, a microsatellite of the University of Rome (Universita di Roma “La Sapienza”, Scuola di Ingegneria Aerospaziale). The microsatellite has a mass of 28 kg and a size of 50 cm x 50 cm x 50 cm. When on orbit, UniSat-5 will deploy the following satellites with 2 PEPPODs (Planted Elementary Platform for Picosatellite Orbital Deployer) of GAUSS:
- PEPPOD 1: ICube-1, a CubeSat of PIST (Pakistan Institute of Space Technology), Islamabad, Pakistan; HumSat-D (Humanitarian Satellite Network-Demonstrator), a CubeSat of the University of Vigo, Spain; e-st@r-2 (Educational SaTellite @ politecnico di toRino-2), of Politecnico di Torino, Italy; PUCPSat-1 (Pontificia Universidad Católica del Perú-Satellite), a 1U CubeSat of INRAS (Institute for Radio Astronomy), Lima, Peru; Note: PUCPSat-1 intends to subsequently release a further satellite Pocket-PUCP) when deployed on orbit. 9)
- PEPPOD 2: Dove-4, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
MRFOD (Morehead-Roma FemtoSat Orbital Deployer) of MSU (Morehead State University) is a further deployer system on UniSat-5 which will deploy the following femtosats:
- Eagle-1 (BeakerSat), a 1.5U PocketQub, and Eagle-2 ($50SAT) a 2.5U PocketQub, these are two FemtoSats of MSU (Morehead State University) and Kentucky Space; Wren, a FemoSat (2.5U PocketQub) of StaDoKo UG, Aachen, Germany; and QBSout-1, a 1U PocketQub testing a finely pointing sun sensor.
• Delfi-n3Xt, a nanosatellite (3.5 kg) of TU Delft (Delft University of Technology), The Netherlands.
• Triton-1 nanosatellite (3U CubeSat) of ISIS-BV, The Netherlands
• CINEMA-2 and CINEMA-3, nanosatellites (4 kg each) developed by KHU (Kyung Hee University), Seoul, Korea for the TRIO-CINEMA constellation.
• CubeBug-2, a 2U CubeSat sponsored by the Argentinian Ministry of Science, Technology and Productive Innovation.
• GOMX-1, a 2U CubeSat of GomSpace ApS of Aalborg, Denmark
• NEE-02 Krysaor, a CubeSat of EXA (Ecuadorian Civilian Space Agency)
• FUNCube-1, a CubeSat of AMSAT UK
• HiNCube (Hogskolen i Narvik CubeSat), a CubeSat of NUC (Narvik University College), Narvik, Norway.
• ZACUBE-1 (South Africa CubeSat-1), a 1U CubeSat (1.2 kg) of CPUT (Cape Peninsula University of Technology), Cape Town, South Africa.
• UWE-3, a CubeSat of the University of Würzburg, Germany. Test of an active ADCS for CubeSats.
• First-MOVE (Munich Orbital Verification Experiment), a CubeSat of TUM (Technische Universität München), Germany.
• Velox-P2, a 1U CubeSat of NTU (Nanyang Technological University), Singapore.
• OPTOS (Optical nanosatellite), a 3U CubeSat of INTA (Instituto Nacional de Tecnica Aerospacial), the Spanish Space Agency, Madrid.
• Dove-3, a 3U CubeSats of Cosmogia Inc., Sunnyvale, CA, USA
• CubeBug-2, a 2U CubeSat from Argentina (sponsored by the Argentinian Ministry of Science, Technology and Productive Innovation) which will serve as a demonstrator for a new CubeSat platform design.
• BPA-3 (Blok Perspektivnoy Avioniki-3) — or Advanced Avionics Unit-3) of Hartron-Arkos, Ukraine.
Deployment of CubeSats: Use of 9 ISIPODs of ISIS, 3 XPODs of UTIAS/SFL, 2 PEPPODs of GAUSS, and 1 MRFOD of MSU.
Orbit: Sun-synchronous near-circular orbit, altitude = 600 km, inclination = 97.8º, LTDN (Local Time on Descending Node) = 10:30 hours. The effective revisit time of DubaiSat-2 is < 8 days for any ground location with a body-pointing capability of the spacecraft (up to ±45º roll tilt, ±30º pitch tilt).
Mission Status
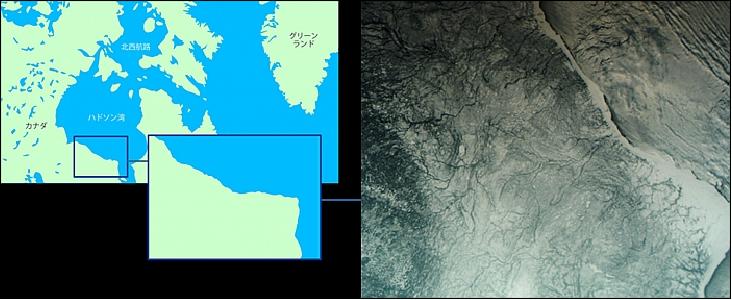
• First test shots with the WNISat-1 camera of Artic ice were acquired in December 2013 to confirm the camera's normal operations. The image data were received by Axelspace and the SVOC (Space Vehicle Operations Center). Technicians at the SVOC at Weathernews Global Center in Japan will continue to make preparations like adjusting parameters for image collection for the start of Arctic ice observation this summer. 10)
Sensor Complement
VIS and NIR cameras
The two cameras are managed by the mission controller. One camera is for the visible radiation spectrum, the other camera observes in the NIR radiation spectrum. Both cameras use the same type of CMOS imaging detector as well as the same optical systems; the lenses have a focal length of 8 mm. The f number of each lens can be adjusted from 1.4 to 16. The objective of the two cameras is the observation of the Arctic Sea ice state.
Size of the CMOS detector array | 1280 x 1024 pixels |
Pixel size | 6.7 µm x 6.7 µm |
SNR (Signal-to-Noise Ratio) | 64 dB |
Dark current | 7.22 mV/s |
Shutter mode | Snapshot or rolling |
Power consumption | 175 mW |
Spectral bands | NIR (Near Infrared, 0.75-1.0 µm) R,G,B |
Size of instantaneous monitoring scene of a snapshot | 500 km x 500 km using a FOV of 56.4º x 46.4º for each camera |
Ground sample distance | 500 m |
Nr of acquired scenes | 10 scenes/day |
Time delay of the product to the customer | About half a day (depends on a number of conditions) |
Laser Mission Unit
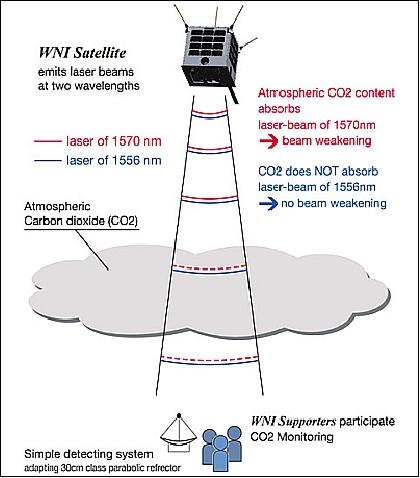
The laser mission unit is being used to monitor the CO2 density in the atmosphere. The device emits pulses of two laser beams at the wavelengths of 1556 nm and 1570 nm in the nadir direction within a very limited time period (10 ~ 20 seconds).
Measurement concept: Signals emitted from the experiment can be measured by a ground station on each spacecraft overflight using a small parabolic antenna (Figure 8). The principle is based on the attenuation of the laser beam of 1570 nm wavelength; this beam is strongly affected (absorbed) by the presence of CO2 in the atmosphere (implying a weaker signal), while the parallel laser beam of 1556 nm wavelength is transmitted with virtually no attenuation. Hence, a comparison of the two laser beam measurements provides a means of CO2 column density determination. Naturally, the CO2 column density measurement is only valid for the location of the ground receiving station. The participation of the amateur radio community is invited for a better coverage of the experiment.
Wavelength of laser , target | 1570 nm |
Wavelength of laser, reference | 1556 nm |
Pulse peak output power of the laser | 500~1000 W (programmable) |
Pulse frequency | 500 Hz ~ 10 kHz (programmable) |
Pulse width | 1~999 µs (programmable) |
Note: The pulse peak power demand (Table 4) of the laser mission unit is actually orders of magnitude higher for a nanosatellite than its real-time power generation capability. However, the operation time of a measurement period is kept very short (10-20 s). In addition, the laser mission unit is equipped with a separate battery package capable of providing this energy on request.
References
1) Sangkyun Kim, Takashi Eishima, Naoki Miyashita, Yuta Nojiri, Yuya Nakamura, “WNISAT - Nanosatellite for north arctic routes and atmosphere monitoring,” Proceedings of the 24th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 9-12, 2010, SSC10-II-6, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1196&context=smallsat
2) Masaya Yamamoto, “WNI Satellite for the Shipping Industry,” May 12, 2010, URL: http://weathernews.com/TFMS/topics/seminar/2010/pdf/Yamamoto.pdf
4) “Microsatellite for Monitoring Polar Ice WNISAT-1,” Axelspace, Oct. 2013, URL: http://www.axelspace.com/wp-content/docs/WNISAT-1_Flyer_EN.pdf
5) http://en.axelspace.com/about/greeting/
6) “Dnepr Cluster Mission 2013,” ISC Kosmotras, Nov. 21, 2013, URL: https://web.archive.org/web/20131125042753/http://www.kosmotras.ru/en/news/149/
7) Patrick Blau, “Dnepr Rocket successfully launches Cluster of 32 Satellites,” Spaceflight 101, Nov. 21, 2013, URL: http://www.spaceflight101.com/denpr-2013-cluster-launch-updates.html
8) “2013 in spaceflight,” Wikipedia, Nov. 21, 2013, URL: http://en.wikipedia.org/wiki/2013_in_spaceflight#November
9) “PUCPSat-1 Satellite Project,” URL: http://inras.pucp.edu.pe/pucpsat1/index.html
10) “First Images Received Private Weather Satellite WNISat-1,” Axelspace, News Release, Jan. 29, 2014, URL: http://www.axelspace.com/wp-content/release/axelspace_news_release_en_20140129.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).