YouthSat / IMS-1A
EO
Mission complete
Space environment
Gravity and Magnetic Fields
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Mission complete |
| Launch date | 20 Apr 2011 |
| End of life date | 19 Apr 2013 |
| Measurement domain | Gravity and Magnetic Fields |
| Measurement category | Gravity, Magnetic and Geodynamic measurements |
| Measurement detailed | Electron density profile, Total electron content (TEC) |
| Instruments | LiV HYSI, RaBIT |
| Instrument type | Space environment, Atmospheric chemistry |
| CEOS EO Handbook | See YouthSat / IMS-1A summary |
YouthSat / IMS-1A
YouthSat, also referred to as IMS-1A (Indian Microsatellite-1A), is the second Indian microsatellite, with a mission life of two years. YouthSat is a joint scientific educational microsatellite mission between India and Russia with participation of young students from both countries in all payload development and data analysis phases. A project agreement (MOU) between ISRO (Indian Space Research Organization) and Roskosmos (Federal Space Agency of Russia) and was signed on January 25, 2007. 1)
YouthSat is India's first aeronomy satellite. The overall objectives of the mission are:
- To provide hands-on experience to student in space experiments and data analysis
- To study solar radiation
- To create a common platform for aerospace students across the world to jointly conduct experiments in space for the benefit of future generations and humanity as a whole.
The microsatellite bus, two payloads and the launch of the spacecraft are being provided by ISRO.
The Russian partner - M. V. Lomonosov Moscow State University (MSU, Moscow) - provides the development of the scientific equipment SolRaD (Solar Radiation Detector) for the studies of the solar activity, its delivery to India, and transfer of the necessary technical documentation and testing equipment to ISRO. 2) 3) 4) 5)
The objectives of the Indian side are to monitor the influence of solar radiation on the ionosphere. The project will be useful to forecast the energetic solar events that could impact manned and unmanned space missions.
The payloads provided by ISRO are RaBIT (Radio Beacon for Ionospheric Tomography) which will be meant for two-dimensional mapping of ionospheric structures- both top and bottom side along the satellite path. And, LiVHySI (Limb Viewing Hyperspectral Imager) for observations of the altitude profile of neutral and ionized species of the upper atmosphere.

Spacecraft
The spacecraft bus of YouthSat is of IMS-1 (Indian Microsatellite-1) mission heritage (launch of IMS-1 on April 28, 2008). The bus has a physical dimension of 604 mm x 980 mm x 1129 mm.
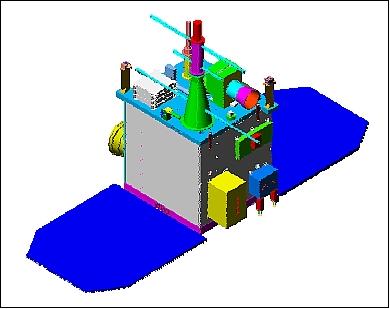
The YouthSat microsatellite employs a modular design concept of the SSB (Small Satellite Bus). The design layout is such that the bus module and the payload module may be integrated and tested separately (thus reducing the interdependency during the realization between both modules). The spacecraft is 3-axis stabilized.
The SSB micro-bus uses aluminum honeycomb panels arranged in a cuboid structure with internal shear frames. This design is made to provide maximum area for mounting the packages while being sturdy. All the subsystem packages are mounted within the cuboid except sensors and antennas which are mounted outside. The structure includes a launch vehicle interface and solar panel interfaces. The payloads are mounted on the top deck, with optical axis towards the + yaw direction.
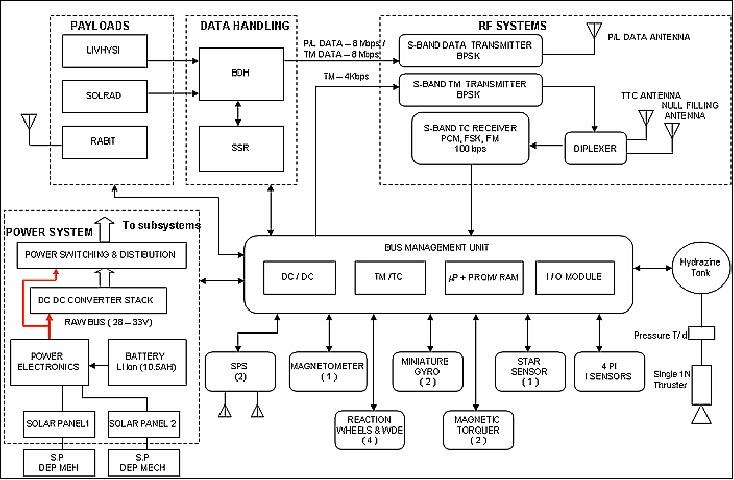
EPS (Electric Power Subsystem): The EPS consists of solar panels, battery, power conditioning and distribution units. There are two solar panels of size 0.81m x 0.72 m in the roll direction of the satellite. The panels are stowed during the launch and deployed after injection to the orbit. The satellite is nominally in sun-pointing mode with the solar panels facing the sun. For every payload operation, the satellite is maneuvered into an Earth-pointing mode and goes back to the sun-pointing mode after the imaging operation. Multi-junction solar cells are being used to provide higher efficiency of power conversion to generate about 230 W. A Li-ion battery is used with a capacity of 10.5 Ah, having a mass of about 3.5 kg. The EPS provides a single raw bus of 28 to 33 V. There are four DC/DC converters which provide the required secondary voltages for the payloads and bus subsystems.
AOCS (Attitude and Orbit Control Subsystem): The AOCS uses sun sensors with 4π FOV providing an accuracy of 0.1º in all axes -to meet the mission specification of band to band registration of 0.25 pixel for the multispectral camera. The sun sensors are being used for sun acquisition and safe mode detection and recovery. A MEMS-based magnetometer is being used in the spacecraft de-tumbling support mode and in the momentum dumping of the reaction wheels. A star sensor, providing an inertial quaternion output, is used as prime sensor during 3-axis stabilization and during the maneuver support modes. The accuracy of the star sensor is < 40 arcsec in all axes. In addition, there are two miniaturized gyros which are dynamically tuned. A GPS-based SPS (Satellite Positioning System) is used to provide the satellite position to an accuracy of < 30 m. Actuation is provided by magnetic torquers (momentum dumping), micro reaction wheels,and an RCS (Reaction Control Subsystem). The reaction wheels have an angular momentum capacity of 0.36 Nms and a torque of 0.015 Nm. The wheels are arranged in a tetrahedral configuration to provide enhanced torques about any axis. The RCS consists of a single tank (8 liter volume) containing a monopropellant fuel and a single 1N thruster. The thruster is primarily used for orbit corrections.
BMU (Bus Management Unit): The BMU represents the heart of the satellite providing the functions of telecommand decoding, house keeping telemetry, data encoding, sensor processing, on/off control of the subsystems and heaters, command distribution, spacecraft control during initial acquisition, normal mode, safe mode etc., using the actuators. This subsystem is realized in a single PCB (Printed Circuit Board).
Passive control methods (with elements like multi layer insulation blankets, optical surface reflectors, thermal paints and heaters wherever necessary.) are being used in the thermal control subsystem. All the subsystems are maintained well within the operational temperature limit.
The propulsion subsystem consists of a single tank carrying 3.5 kg hydrazine. There is only single 1 N thruster, mounted centrally, it is mainly used for orbit correction.
Spacecraft design life | 2 years |
Spacecraft stabilization | - 3-axis stabilized using reaction wheels |
GPS | SPS (Satellite Positioning System) for orbit determination |
Spacecraft power | - Two body fixed panels, which are capable of generating 220 W at EOL |
Onboard data storage | SSR (Solid State Recorder) of 16 Gbit capacity |
Propulsion subsystem | - Single tank carrying 3.5 kg of hydrazine |
RF communications | - S-band transmitter for payload data, downlink data rate = 8 Mbit/s, modulation: PCM/BPSK |
Spacecraft bus size, mass | Bus (604 mm x 980 mm x 1129 mm), launch mass of spacecraft = 92.8 kg |

Launch
YouthSat was launched on April 20, 2011 as a secondary payload on the PSLV-C16 vehicle of ISRO. The primary payload on the flight is ResourceSat-2 of ISRO with a launch mass of 1206 kg. 8) 9)
• XSAT of NTU, Singapore (XSAT is another secondary payload) with a mass of 106 kg.
Orbit: Sun-synchronous near-circular orbit, altitude = 822 km, inclination = 98.78º, period = 101.35 min, local time of equator crossing at 10:30 hours on descending node (LTDN). 10)
Mission Status
- April 25, 2013: YouthSat, while still operational, has completed its mission, and will remain in orbit indefinitely
- September 2012: the YouthSat microsatellite and its payload instruments are being operated routinely. 11)
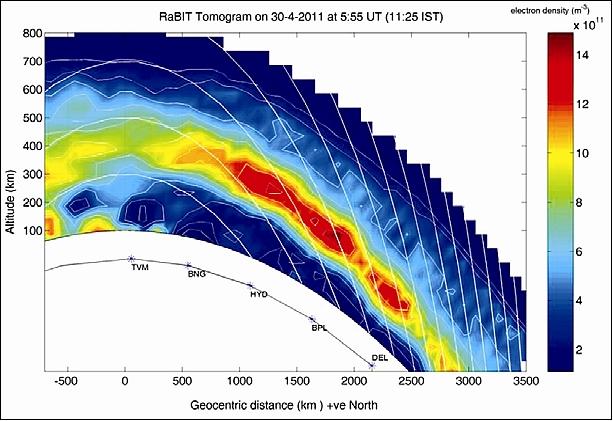
Figure 5: Sample RaBIT ionospheric tomograph of April 30, 2011 taken along the 77º E meridian over India (image credit: ISRO) 12)
- April 29, 2011, the Russian payload, Solar Radiation Experiment (SolRaD) will be switched-on. 13)
- April 25, 2011: The health of YouthSat is normal. The two Indian payloads LiVHySI (Limb Viewing Hyperspectral Imager) and RaBIT (Radio Beacon for Ionospheric Tomography) have been switched on.
Sensor Complement
Instrument | Accommodation | Pointing direction requirement |
SolRaD | Along -yaw axis | Sun pointing |
LiVHySI | Along -pitch axis | Limb viewing |
RaBIT | Along +yaw axis | Station pointing |
Star sensor | Along +pitch axis |
|
Table 2: Instrument pointing requirements
SolRaD (Solar Radiation Detector)
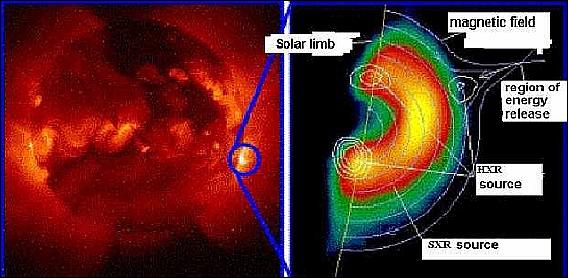
The SolRaD instrument is being provided by MSU (M. V. Lomonosov Moscow State University). The objective of SolRaD is to monitor the solar flare activity by measuring the temporal and spectral parameters of solar flare X-rays and gamma rays as well as of charge particle (electron and protons) fluxes in Earth's polar cap regions which are sensitive to solar flare activity (Ref. 2).
The hard X-ray radiation is measured within the energy range of 10-100 keV. The gamma-radiation is monitored in the energy range of 0.2-5.0 MeV. The energy ranges of the charged particles are: 0.3-3.0 MeV for electrons and 3-100 MeV for protons.
The SolRaD equipment consists of two modules: DB (Detecting Block), and DEB (Digital Electronics Block).
The DB contains detecting unit for X-ray and gamma registration, detecting unit for electrons registration, construction elements and electronic cards. The detecting unit for X-ray and gamma registration is a scintillation detector with NaN (Tl) and CsI (Tl) in a single pack overlooked by a photomultiplier. The sizes of the crystals are 80 mm x 3 mm and 80 mm x 77 mm, respectively. The detecting unit for electron registration is a telescope composed of four thin-layered (~500 µm thick), the Si detectors have an active area of ~6 cm2.
In order to extend the energy ranges of the registered charged particles, it is planned to insert an aluminum layer between the second and the third detectors, and a copper layer between the third and the forth detectors.
The DEB provides the service of transmitting the scientific source data to the onboard support systems using 24 analog channels and a digital interface. The DEB consists of the processor, storage elements and buffer cascades, which provide the transfer of the signals from the detecting block and data transmission to the onboard telemetry subsystem.
RaBIT (Radio Beacon for Ionospheric Tomography)
The instrument is being developed under the management of ISRO/VSSC (Vikram Sarabhai Space Centre), Trivandrum, Kerala, and Andhra University, India. The objective of RaBIT is to monitor the TEC (Total Electron Content) of the atmospheric flux and to study the structure and dynamics of the equatorial ionosphere over the Indian region using tomographic techniques.
The TEC is derived from the phase difference between two electromagnetic waves as it propagates from onboard beacon through the ionosphere to the ground receiver.
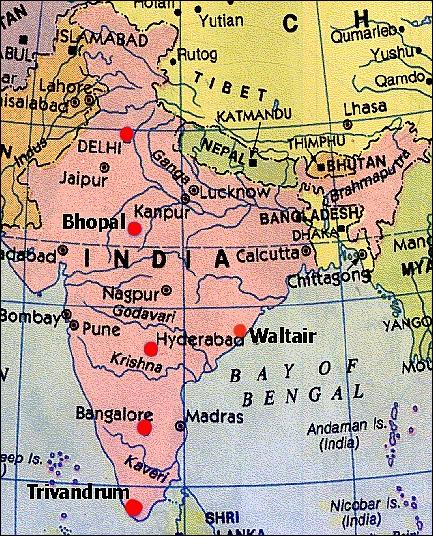
The RaBIT instrument is planned to be operated over a pre-defined Indian station (stations) whose coordinates are programmed onboard where the RaBIT beacon signal has to be received. RaBIT has a FOV (Field of View) of ± 70.0º in the orbital yaw roll plane and ± 45.0º in the yaw pitch plane such that in between maneuvers can be avoided during station pointing geometry.
Station | Northern Latitude | Eastern Longitude |
Delphi | 28.8º | 77.2º |
Bhopal | 23.2º | 77.25º |
Hyderabad | 17.3º | 78.3º |
Bangalore | 13.0º | 78.0º |
Trivandrum | 8.5º | 77.0º |
LiVHySI (Limb Viewing Hyperspectral Imager)
The instrument has been developed in partnership of ISRO/VSSC and ISRO/SAC Space Applications Center (Ahmedabad, India). The main objective of this Indian instrument is to perform airglow measurements, i.e. altitude profiles of neutral and ionized species of Earth’s upper atmosphere (altitude range of 100 to 1100 km) in the spectral range of 450 - 950 nm with a spatial resolution of 4 km and a spectral resolution of 8 nm.
LiVHySI is an improved version of earlier developed HySI sent on moon mission Chandrayan-1. The spectral channels have been increased from 64 to 512 and the radiometric sensitivity is improved by replacing F/4 optics to F/2 and also optimizing detector operating conditions.A Raleigh sensitivity of 50 has been achieved. It is a miniaturized spectrometer realized using wedge filter and low power CMOS detector. The spectrum is sampled in 1nm intervals. 14)

The LiVHySI measurements are to be along the radial vector with view axis along the horizon (limb). There are four viewing options available for imaging, namely:
1) Forward horizon (In-Plane horizon observation in the direction of motion)
2) Backward horizon (In-Plane horizon observation opposite to the direction of motion)
3) Out of Plane horizon observation in the direction of orbit normal
4) Out of Plane horizon observation opposite to the direction of orbit normal.
The LiVHySI instrument is planned to be operated during the eclipse phase of the orbit with an option to select any of the four horizon modes of operation. Four horizon viewing attitude geometries like: In-plane horizons - forward and backward viewing attitude orientations along the direction of spacecraft motion and out-of-plane horizons – In the direction of the orbit normal and opposite to the direction of orbit normal attitude orientations profiles have been formulated.
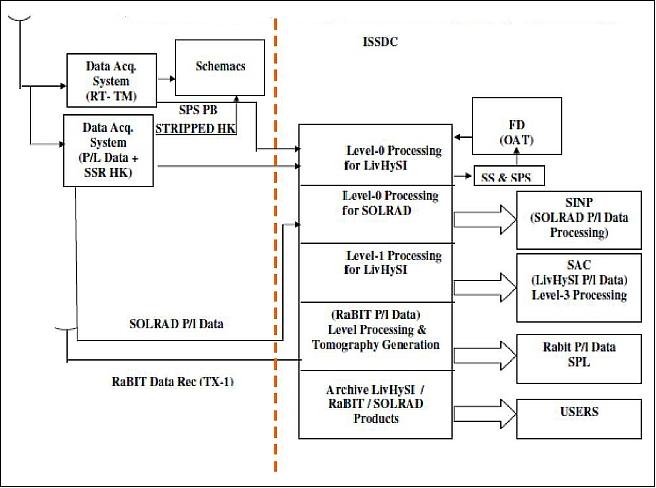
Ground Segment
The ground segment elements are spacecraft control center, payload operations, data reception & payload data acquisition, Level-0 operations, data processing facility, data products generation, archival and dissemination to meet the mission requirements. The RaBIT data will be collected by intended set of stations and the data transferred to ISSDC (Indian Space Science Data Center) Bangalore, India.
The data from other two ISRO payloads, along with the HK/PB (Housekeeping/Playback) data will be received at Bangalore station and moved to ISSDC. The YouthSat spacecraft will be controlled through the Bangalore ISTRAC (ISRO Telemetry and Command Center) network station. 15)
References
1) D. V. A. Raghava Murthy, “Small satellite busses catering for different missions,” Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.4.8
2) https://web.archive.org/web/20120323135814/http://space.msu.ru/eng/projects/planned/YouthSat/
3) http://indianspacestation.com/student-initiative/122-youthsat.html
4) Marappa Krishnaswamy, “Future Remote Sensing Missions of ISRO,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B1.1.6
5) M .Srikanth, V. Kesava Raju, “Youthsat mission analysis and planning - outline of key components,” Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
6) “YouthSat brochure,” URL: http://www.issdc.gov.in/docs/Youthsat_Brochure.pdf
7) http://www.isro.org/pslv-c16/Imagegallery/satellite.aspx
8) http://www.indianspacestation.com/iss/35-articles/242-pslv-c16-resourcesat-2-launch-on-april-20-2011.html
9) http://www.isro.org/satellites/youthsat.aspx
10) Brochure of PSLC-16, ISRO, URL: http://www.isro.org/pslv-c16/pdf/PSLV-C16Brochure.pdf#RESOURCESAT
11) Information provided by A. S. Kiran Kumar, Director of ISRO/SAC, Ahmedabad, India
12) “YouthSat-Announcement of Opportunity,” Current Science, Vol. 101, No 5, Sept. 10, 2011, URL: http://cs-test.ias.ac.in/cs/Volumes/101/05/0693.pdf
13) “PSLV-C16 Flight Successful: RESOURCESAT-2, YOUTHSAT and X-SAT Satellites Functioning Satisfactorily,” ISRO Press Release, April 25, 2011, URL: http://www.isro.org/pressrelease/scripts/pressreleasein.aspx?Apr25_2011
14) “YouthSat – Limb viewing Hyper Spectral Imager,” ISRO/SAC, 2010, URL: http://www.sac.gov.in/SACSITE/oct10/Youthsatwriteup.pdf
15) “Youthsat-1 (IMS-1A) Hand Out,” URL: http://www.issdc.gov.in/docs/YouthsatHandout.pdf
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).