Aeneas nanosatellite of USC/SERC
EO
Operational (nominal)
USC / SERC
Aeneas is a 3U CubeSat nanosatellite, developed at the Space Engineering Research Center (SERC), University of Southern California (USC) in collaboration with student teams. Launched in 2012, Aeneas is the first CubeSat with the capability to track the location of cargo containers on a global scale over the open ocean using a 1 watt WiFi-like transceiver.
Quick facts
Overview
| Mission type | EO |
| Agency | USC / SERC |
| Mission status | Operational (nominal) |
| Launch date | 13 Sep 2012 |
| CEOS EO Handbook | See Aeneas nanosatellite of USC/SERC summary |
Summary
Mission Capabiliities
As it’s primary payload, Aenaes carries a parabolic deployable antenna and a 1 Watt Wi-Fi-like, feedhorn-mounted, transceiver which gives the satellite the capability to track cargo containers over the open ocean. In comparison, preexisting cargo container tracking systems were only capable of identifying a container within a mile from shore, but lost all contact for the majority of the open-water journey. Data obtained by Aenaes is used by both governmental and non-governmental bodies to track cargo containers, including the US Department of Homeland Security which uses Aeneas data in its Secure Transit Corridors program.
A secondary experimental payload consisting of a next-generation, radiation-hardened flight processor was designed and built for the spacecraft, but was not included in the final spacecraft.
Performace Specifications
In order to accurately track the location of cargo containers on a global scale, Aenaes maintains a 2° accuracy surface track.
Aeneas follows a 770 km x 480 km elliptical orbit, with an inclination of 66°. The satellite's 450 to 550 km altitude range translates to a direct overhead pass for the nanosatellite at perigee. The full slant range extends to well over 2000 km for a horizon pass at apogee.
Space and Hardware Components
Aeneas uses a 3U (three-unit) CubeSat satellite bus provided by Pumpkin Inc. and the National Reconnaissance Office (NRO) Colony CubeSat program. The spacecraft features a 8051-based flight processor, an ADACS (Attitude Determination and Control Subsystem) unit and DEPS (Deployable Electrical Power Subsystem). A Microhard MHX425 transceiver and an AstroDev Neon beacon allow RF (radio frequency) communications.
Significant additional functionality was integrated into the Aeneas spacecraft, stretching the attitude control and power generation capabilities to their limits. These features include modified solar cell panels to provide sufficient power and the inclusion of a Sinclair Interplanetary SS-411 two-axis digital sun sensor to achieve the 2º pointing accuracy of Aeneas.
Aeneas nanosatellite of USC/SERC
Spacecraft Launch Mission Status Sensor Complement References
Aeneas is a 3U CubeSat (i.e., a nanosatellite by definition) development of student teams at USC/SERC (University of Southern California/Space Engineering Research Center), Marina Del Ray, CA, USA. SERC is a facility of the Astronautics Department and ISI (Information Sciences Institute) at USC. The goal of the mission is to track the location of cargo containers on a global scale. To accomplish this feat, the satellite must maintain a 2º accuracy surface track – the first of its kind in CubeSat technology. 1) 2) 3) 4) 5)
The program is the first of several funded satellite and spacecraft development efforts at USC that will provide students with hands-on experience in satellite design assembly and integration. The Aeneas project is supported by the ORS (Operationally Responsive Space) Office and AFRL (Air Force Research Laboratory) at Kirtland AFB, N.M. The tracking of containers worldwide is a research request of the US DHS (Department of Home Security).
The project is named after the Trojan warrior "Aeneas" who personifies duty and courage.
Spacecraft
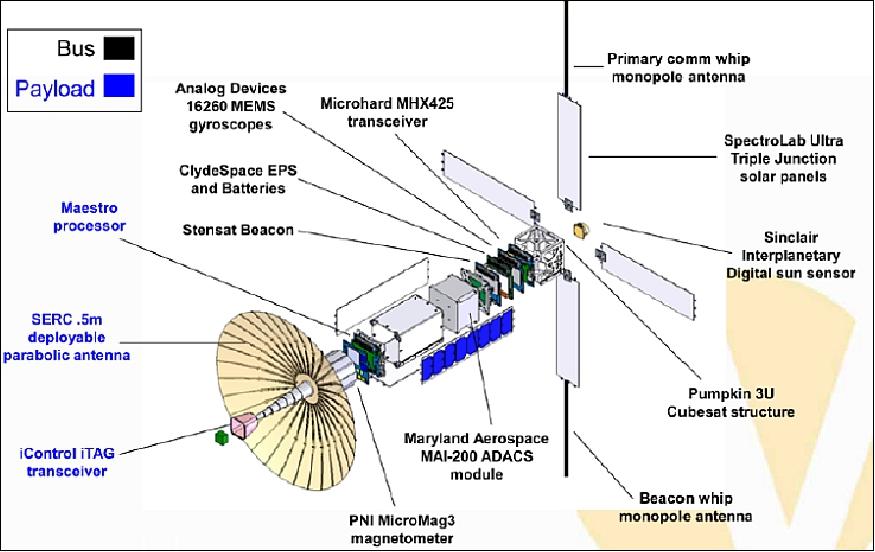
Caerus, the first CubeSat of USC, was a modified 3U Colony-I CubeSat of NRO (National Reconnaissance Office) heritage; the Colony-I bus is based on the Pumpkin XS-25a CubeSat bus. The Colony-I CubeSats, referred to as QbX-1 (CubeSat Experiment-1) and QbX-2 of NRL, were launched on Dec. 8, 2010. - The Aeneas baseline bus, provided by Pumpkin Inc., contains an 8051-based flight processor, an ADACS (Attitude Determination and Control Subsystem) unit and DEPS (Deployable Electrical Power Subsystem) housed in a 3U bus. 6)
ADACS features the MAI-100 of Maryland Aerospace, which contains three miniature reaction wheels and three electromagnetic torque rods in a hermetically sealed enclosure, an external PNI MicroMag3 magnetometer, and coarse sun-sensing ability via the body-mounted solar panels.
The DEPS (Deployable Electrical Power System), manufactured by ClydeSpace (UK), controls eight SpectroLab UTJ (Ultra Triple Junction) solar panels (three body-mounted, one end-mounted and four deployable) that charge three pairs of Lithium Ion Polymer batteries and provides power distribution.
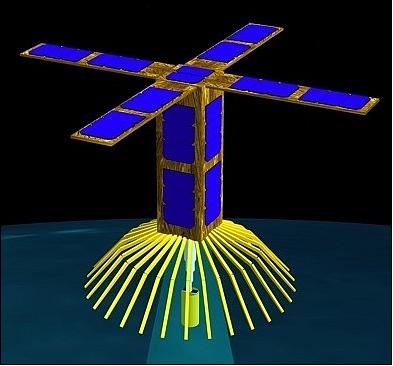
To achieve the mission goals, significant additional functionality had to be integrated into the bus. Firstly, to provide sufficient power, the deployable panels were modified to deploy to a 90º angle with the solar cells facing outward. The nanosatellite will be orientated into a sun-pointing attitude profile with this "flower petal" panel configuration facing the sun.
To achieve the 2º pointing accuracy, a Sinclair Interplanetary SS-411 two-axis digital sun sensor was selected to improve upon the baseline capabilities. To face the sun, it had to supplant the solar cells present on the sun-pointing face. Also, ADIS16260 single-axis MEMS gyroscopes of Analog Devices are used to propagate the sun vector during slews and eclipse phases. To reduce field input from the reaction wheel motors, the magnetometer was relocated from the ADACS interface to a far corner in the payload section. Finally, heritage GNC flight software had to be added to support the ADACS.
RF communications:
For communications, a Microhard MHX425 115 kbit/s transceiver was added for telemetry and command, as well as an AstroDev Neon beacon. Two monopole whip antennas were added to support the two radios. Lastly, two Microchip PIC24-based flight processors were selected to replace the 8051-based flight processor. One flight processor board is a Pumpkin Inc. standard PPM (Pluggable Processor Module) containing the PIC24FJ256GA110 microcontroller. The other has the same PIC24 chip and PPM form factor but was custom-designed by iControl and ISI (Information Sciences Institute) to include the three single-axis gyros on board.
The flight software for Aeneas is spread across the two flight processor boards. The projects refer to these PPMs as "Upper" and "Lower," in reference to their position on the nanosatellite stack. Though several core functions are common to both, in general, the Upper PPM contains all code relevant to C&DH (Command and Data Handling), while the Lower PPM contains all code relevant to ADACS.
The processors are not redundant, but each has the capability to send commands and data to the other and monitor the other's health and status. Both have been risk-reduced through previous missions. The ADACS software has its heritage in the MSTI (Miniature Sensor Technology Integration) program of the 1990s. The objective of MSTI was to "perform experiments to characterize a wide variety of SDIO (Strategic Defense Initiative Office) advanced sensor technologies in the LEO (Low Earth Orbit) space environment."
Launch
The Aeneas nanosatellite was launched on Sept. 13, 2012, as a secondary payload on an Atlas-5-411 vehicle of ULA (United Launch Alliance) from VAFB, CA. The primary payload on this flight, referred to as NROL-36, National Reconnaissance Organization Launch) were two NRO/MSD (Mission Support Directorate) classified spacecraft, namely NOSS-36A and NOSS-36B. 7) 8)
Orbit of all secondary payloads: Elliptical orbit of 770 km x 480 km, inclination = 66º.
The NASA/LSP (Launch Services Program) sponsored secondary spacecraft on this ELaNa-6 flight are:
• CINEMA (CubeSat for Ions, Neutrals, Electrons, & MAgnetic fields), a 3U CubeSat of UCB/SSL (USA), ICL (UK), KHU (Korea), and NASA/ARC.
• CSSWE (Colorado Student Space Weather Experiment), a 3U CubeSat (~ 4 kg) of the University of Colorado at Boulder.
• CP5 (Cal Poly CubeSat 5), a 1U CubeSat.
• CXBN (Cosmic X-ray Background Nanosatellite), a 2U CubeSat (2.6 kg) of a consortium od US institutions: MSU (Morehead State University) of Morehead, KY; UCB (University of California at Berkeley), Berkeley, CA; Noqsi Aerospace, Ltd., Pine, CO; LLNL (Lawrence Livermore National Laboratories), Livermore, CA; and SSU (Sonoma State University), Rohnert Park, CA.
Next to the above list of NASA-sponsored secondary payloads, there are additional secondary payloads sponsored by NRO/MSD as shown in Table 1 (containing all secondary payloads).
P-POD | Launch Sponsor | CubeSat Name | Organization | Size | Mass (kg) | Mission |
1 & 8 | NRO/MSD | SMDC-ONE 2.1 | US Army SMDC/ | 3U, Qty 2 | 4.1 | Communications |
2 | NRO/MSD | AeroCube-4.5 | Aerospace Corp., El Segundo, CA | 1U, Qty 2 | 1.3 | Technology Demo |
2 | NRO/MSD | AeroCube-4.0 | Aerospace Corp | 1U | 1.1 | Technology Demo |
3 | NRO/MSD | Aeneas | USC, Marina Del Ray, CA | 3U | 3.7 | Cargo Tracking |
7 | NRO/MSD | Re (STARE-A) | LLNL, Livermore, CA | 3U | 4.0 | Space Debris Mitigation |
4 | NASA/LSP | CSSWE | Univ of Colo/NSF | 3U | 3.5 | Space Weather |
5 | NASA/LSP (Launch Services Program) | CXBN | Morehead State University and Kentucky Space | 2U | 2.6 | Space Weather |
5 | NASA/LSP | CP5 | CalPoly, San Luis Obispo, CA | 1U | 1.1 | Debris Mitigation |
6 | NASA/LSP | CINEMA | NSF/UCB Berkeley | 3U | 2.8 | Space Environment |
The launch of all CubeSats is being conducted in a new container structure, referred to as NPSCuL (Naval Postgraduate School CubeSat Launcher). This new dispenser platform was designed and developed by students of NPS (Naval Postgraduate School) in Monterey, CA, to integrate/package P-PODs as secondary payloads.
NRO refers to all 11 secondary (or auxiliary) CubeSat payloads on NROL-36 as the OUTSat (Operationally Unique Technologies Satellite) mission using for the first time the NPSCuL platform as a container structure for the 8 P-PODs (Ref. 10).
Mission Status
• February 2017: Aeneas remains in orbit and though the batteries do not hold during the eclipse, beacons are still heard and decoded. Most often by the faithful amateurs in Japan -437.6 MHz, AFSK AX.25, 60-second intervals (Ref. 13). 11)
- Aeneas' primary payload demonstrated tracking cargo containers over the open ocean with a 1 W WiFi-like transceiver. This was in support of a U.S. DHS (Department of Home Security) effort for open ocean cargo tracking, designed by the primary payload provider iControl Inc. SERC advancements on the CubeSat included a custom-built deployable 0.5 m mesh antenna and an increase of the attitude control and power generation capabilities of the Colony I bus over the original specifications. 12)
• The Aeneas nanosatellite is operating nominally in February 2014 (17 months on orbit). The amateur beacon is active in daylight and partially in the eclipse phase worldwide. Monitoring beacon data is being received from the amateur community. Monitoring of Wi-Fi (Wireless Fidelity) experiments over southern California. 13)
• The Aeneas nanosatellite is operating nominally in the fall of 2013.
• After the launch (on Sept. 13, 2012), the Aeneas project received very large amounts of support from the international amateur radio community. The spacecraft has been heard from various locations in the world including Germany, Japan, Australia, India, Italy, United States. 14)
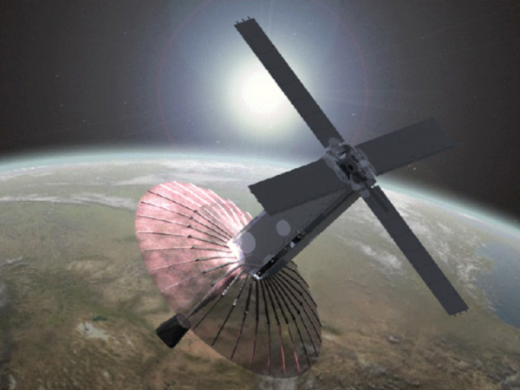
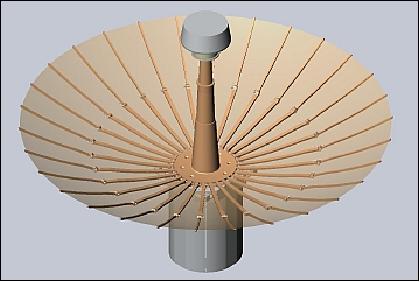
The Aeneas spacecraft is the first nanosatellite to deploy an antenna of this magnitude, ever in the history of all cubesat launches. The dish antenna is 0.5 m in diameter and will be oriented through sun tracking and three-axis stabilized methods as the mission progresses.

Sensor Complement
Primary Payload
The goal of the primary payload is to track cargo containers over the open ocean with a 1W WiFi-like transceiver. A current tracking system for cargo containers, designed by the project's primary payload provider iControl Inc., is capable of identifying the container within a mile from shore but loses all contact for the majority of the open-water journey. However, for both government and non-government entities, the ability to track containers in transit is highly valued.
This mission uses a custom-built deployable mesh antenna and stretches the attitude control and power generation capabilities of the nanosatellite bus to their limits.
Three-axis pointing:
To achieve the required surface track, Aeneas must know both its attitude and its orbital position with respect to the target on Earth.
This requires a state vector of 11 elements:
- 4 for the attitude quaternion,
- 6 for orbital position and velocity,
- 1 element describing the Earth's rotation.
During an ADACS GNC (Guidance, Navigation & Control) cycle, the following series of events must occur: the state vector must be updated to reflect the most current satellite position, the attitude must be compared with a desired attitude to generate an error signal, the error signal must be fed through a control law to generate torque commands, and the commands must be acted upon with enough authority to maintain pointing accuracy throughout a pass.
Antenna design:
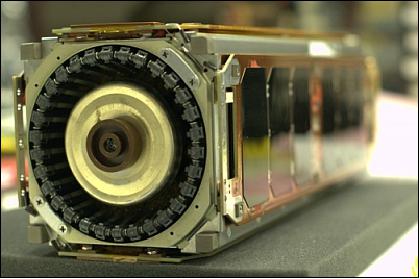
The primary mission of Aeneas is a proof-of-concept communications link requiring 3-axis pointing and surface tracking with a nanosatellite. The satellite is intended to receive communications from a 1 W transmitter on the ground and then downlink with another station on the ground. To achieve these goals, the satellite features a 0.5 m deployable antenna. The antenna consists of a mesh constrained by 30 ribs with 2 joints each, as well as a deployable central mast housing the transceiver. The rib and mesh design allows the packaged antenna to fit within the small form factor required to fit inside the nanosatellite payload section of size: 10 cm x 10 cm x 16 cm. When stowed, a central hub connected to the ribs and the mast will be lowered inside a canister within the payload section; upon deployment, a spring will force this hub out of the canister which will release the ribs.
The construction of the antenna consists of attaching the ribs and mast to the central hub and attaching the mesh to the hub/rib assembly. The ribs are attached via rivets and are held in the open position with torsional springs. The central mast with the subreflector and transceiver is constrained by the tapered shape of the mast and is held in place with a linear spring.
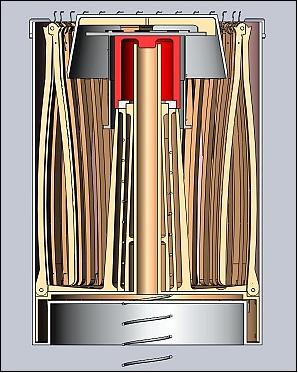
Antenna stowage:
Due to the relatively complex nature and small size of the dish, stowage presents an interesting problem. Because the ribs are bound together by a relatively tightly stretched mesh when deployed, the ribs must essentially be folded inward simultaneously. Failure to do so may result in cross-axis torques on the joints of the ribs. Because of the small size of the antenna hardware, these torques may be sufficient to cause damage to the rib joints, which could result in breakage or misalignment. Additionally, the stowage scheme needs to happen in a slow and controlled manner, as the mesh must be carefully managed to prevent any sort of entanglement upon deployment.
This problem is further compounded by the design of the dish. Each rib consists of an inner and outer portion, connected by a spring-loaded hinge joint. This rib assembly is then attached to the inner hub by a similar spring-loaded hinge joint. Due to the positioning of the rib sections in the stowed configuration (Figure 6), the outer portion of the rib must be folded before the inner portion of the rib. However, as both sections are jointed, an upward force on the outer portion of the rib will result in the actuation of the rib joint connecting the inner rib to the hub rather than the joint connecting the inner and outer ribs due to a larger lever arm. Furthermore, the dish cannot be readily accessed from the front due to the mesh.
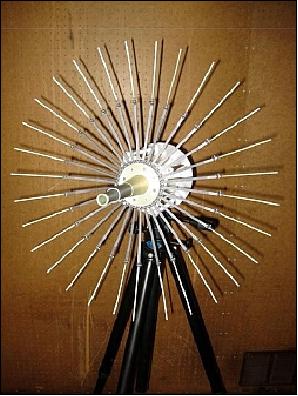
Antenna deployment:
Deployment of the antenna is achieved using springs and a nylon burn wire. There are 62 total springs in the system - 60 springs on the rib joints (1 spring per joint, 2 joints per rib, and 30 ribs), 1 spring to deploy the mast, and 1 spring to deploy the entire hub assembly out of the canister. The entire system is initially held with the springs in tension - the ribs are constrained from deploying by the canister walls and the mast and hub is held in the stowed position with the nylon monofilament in tension.
This monofilament has a section which is wrapped in a nichrome wire which will when provided current, cause the monofilament to melt. This will allow the spring to force the hub out of the canister. Once the antenna ribs clear the canister walls, the springs in the joint will force the dish to open. The springs are set up to provide torque in the deployed position - the final, correct shape is determined by hard stops in the hardware.
Link design:
There are 3 communication channels on Aeneas. Two of these are on the bus, allowing command and telemetry to the flight software. The third is the previously described parabolic antenna, used by the primary payload for its tracking mission. The design of these three links follows.
The primary payload – the parabolic deployable antenna and feedhorn-mounted transceiver – will communicate with both Earth-based transceivers called "iTags" and small array antennas tied to central receivers called "iGates". Both the iTags and iGates are tied to the internet to provide remote monitoring. The transceiver as well as the entire tracking infrastructure is produced by iControl Inc. of Santa Clara, CA.
Parabolic reflectors provide a significant advantage for long range communications in that they allow for higher gains at a given frequency relative to other antenna geometries suitable for nanosatellite application, including horn and lens antennas. Hence, parabolic reflectors operating at high gain will necessarily produce reduced beamwidths; the reflector diameter must exceed the transmission wavelength by a large margin for these high gains to be realized. The transceiver aboard the satellite, and located at Earth stations, communicate via the S-band link (2.4 GHz).
By Planck's light equation, this provides a wavelength of 12.5 cm, about 4 times smaller than the actual reflector diameter. Thus, the reflector size requirements are satisfied.
The transceivers themselves feature a dual receive (Rx)/transmit (Tx) design. This eliminates noise produced by Rx/Tx switching within the antenna circuit. The Rx/Tx antenna switch loss at the feed point is estimated at 4.5 dB. The dual integration design is a product of iControl Inc. Each dual integration transceiver PCB (Printed Circuit Board) includes 2 Mbit of memory and has a store-and-forward capability. Communications are performed under 128 AES encryption, and the DSSS 2.4 GHz band is internationally legal. In terms of specific Rx/Tx functionality, the communication uplink performs tracking and alarm control while the downlink performs tag commissioning and command.
The downlink transmission features an 18 dB antenna gain, a larger figure than the 6 dB antenna gain associated with the uplink transmission. Additionally, the link includes a LNA (Noise Amplifier) device located aboard the nanosatellite payload. This multistage LNA includes filters to minimize out-of-band noise and provides a gain of 22 dB. Table 2 is an overview of the system link budget of the parabolic antenna.
Parameter | Uplink (Tag → SV) | Downlink ((SV → Tag) |
Transmitter gain | 30 dB | 30 dB |
Tx antenna gain | 6 dB | 18 dB |
Free space loss (@ 450-550 km) | -155 dB | -155 dB |
Rx antenna gain | 18 dB | 6 dB |
Rx LNA gain | 22 dB | 22 dB |
Fade margin | +12 dB | +12 dB |
The free space loss calculations correspond to the ideal satellite range conditions. The 450-550 km altitude range translates to a directly overhead pass for the nanosatellite at perigee. The full slant range extends to well over 2000 km for a horizon pass at apogee.
Telemetry and command: The telemetry and command link between a satellite monopole whip antenna and the Earth (ground station) is closed using a 3 m azimuth-elevation controlled dish antenna with a secondary reflector and helical feed, mounted on a trailer and located as needed for good mission visibility. The fixed dish was retrofitted with sturdy articulation hardware and the helical feed was hand made. Together they have a measured gain of 19 dBi at the frequency of the MHX425 – nominally 437 MHz (UHF). With primary characteristics that include a transmission power of 1 W and a horizon-limited elevation angle of 15º, the ground station will be used to complete the primary communications link with the satellite. This power level provides a closed transmission link up to a satellite slant range of 1400 km.
The secondary communications channel is comprised of the AstroDev NE-1 9600 baud GMSK beacon. It uses a second whip antenna and broadcasts rotating health, status and mission information data at regular intervals. The 1 W unidirectional link is closed with a large azimuth-elevation controlled Yagi antenna and an amateur radio receiver on the roof of the physics building on the University of Southern California campus. Amateur radio enthusiasts around the world will be employed, as with previous missions, to return beacon data throughout the spacecraft's orbit.
Secondary Payload
The secondary payload is an experimental, next-generation, radiation-hardened flight processor. The result of many government-funded research initiatives, this ITAR (US International Traffic in Arms Regulation)-controlled processor is at risk of staying in the "unholy valley" between research and development. On Aeneas, the processor will be space-qualified by performing self-diagnostic checks and reporting the results back to the ground.
References
1) Michael R. Aherne, J. Tim Barrett, Lucy Hoag, Eric Teegarden, Rohan Ramadas, "Aeneas — Colony I Meets Three-Axis Pointing," Proceedings of the 25th Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 8-11, 2011, SSC11-XII-7, URL: http://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=1181&context=smallsat
2) "Aeneas Satellite Program Blasting Off," Feb. 10, 2010, URL: http://uscnews.usc.edu/science_technology/aeneas_satellite_program_blasting_off.html
3) "Aeneas Cubesat Mission Blasts Off at ISI," Feb. 11, 2010, URL: http://www3.isi.edu/about-news_story.htm?s=223
4) https://web.archive.org/web/20220526023737/https://viterbi.usc.edu/news/news/2010/viterbi-serc-aeneas.htm
5) Turner Brinton, "USC's 1st Satellite, a Triple Cubesat, Will Demonstrate Cargo-Tracking Concept," Space News, Feb. 22, 2010, URL: http://spacenews.com/civil/100222-usc-cubesat-demonstrate-cargo-tracking-concept.html
6) Information provided by Michael Aherne of USU, Los Angeles, CA, USA.
7) "Atlas V launches on classified Flight to orbit NROL-36 Payload," Spaceflight 101, Sept. 14, 2012, URL: http://www.spaceflight101.com/nrol-36-launch-updates.html
8) "2012 in Spaceflight," Wikipedia, URL: http://en.wikipedia.org/wiki/2012_in_spaceflight
9) Guy Mathewson, "2012 CubeSat Workshop, OSL's Vision & Mission," 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/01-Mathewson-Keynote.pdf
10) Travis Willcox, "Office of Space Launch Atlas V Aft Bulkhead Carrier & Operationally Unique Technologies Satellite," 9th Annual Spring CubeSat Developer's Workshop, Cal Poly State University, San Luis Obispo, CA, USA, April 18-20, 2012, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2012/Spring/35-Wilcox-NationalReconsisanceOffice.pdf
11) "Aeneas Telemetry, USC/SERC, January 2017, URL: http://www.isi.edu/centers/serc/aeneas_telemetry
12) http://www.isi.edu/centers/serc/nanosatellites
13) Information provided by Tim Barrett, Project Manager of Aeneas at USC (University of Southern California).
14) "Aeneas News," USC, October 2, 2012, URL: http://www.isi.edu/projects/serc/aeneas_news
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top