BeaverCube CubeSat Mission
EO
Operational (nominal)
MIT
BeaverCube is a 3U CubeSat, developed by MIT (Massachusetts Institute of Technology) and built in collaboration with students as part of an educational mission in aerospace science and technology. Launched in June 2021, BeaverCube measures VIS (visible) and LWIR (long wave infrared) spectral data to obtain colour and thermal images of the ocean surface and cloud tops, which have many applications including monitoring regional biological productivity and the effects of extreme weather events.
Quick facts
Overview
| Mission type | EO |
| Agency | MIT |
| Mission status | Operational (nominal) |
| Launch date | 03 Jun 2021 |
| CEOS EO Handbook | See BeaverCube CubeSat Mission summary |
Summary
Mission Capabilities
BeaverCube carries a payload of two FLIR (Forward Looking InfraRed Infrared) Boson Long-Wave Infrared (LWIR) cameras and one MatrixVision BlueFox Visible Spectrum (VIS) camera. An M16 filter has been fitted to one of the LWIR cameras to isolate the 11.5 - 12.5 µm spectral range and reduce cloud noise. Together, the LWIR cameras measure sea surface temperature across a spectral range of 7.5 - 13.5 µm, corresponding to temperatures of -59°C to 113°C. The VIS camera obtains colour images of Earth’s oceans to infer bio-optical properties, such as light absorption by coloured dissolved organic matter.
The information collected by BeaverCube helps to improve understanding of regional biological productivity and analyse the effects of extreme weather events.
Performance Specifications
Both LWIR cameras have a focal length of 13.5 mm and a 16° FOV (field of view), providing a spatial resolution of 348 m and a footprint of 9911 km2. The VIS camera uses a Kowa lens with a fixed focal length of 16 mm and a ground resolution of 150 m.
BeaverCube orbits at an altitude of approximately 410 km with an inclination of 51.6°.
Space and Hardware Components
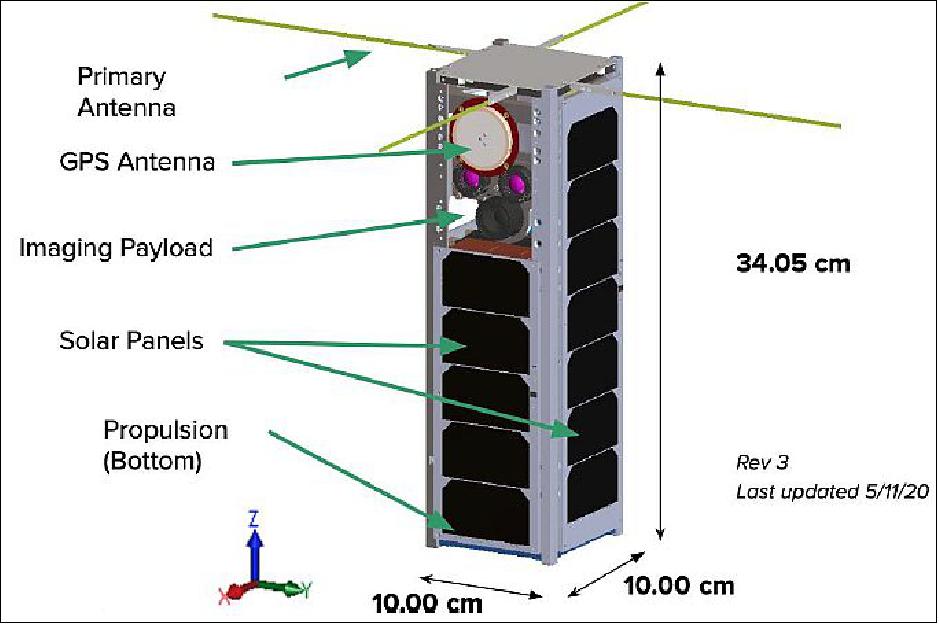
BeaverCube is a 3U CubeSat with a mass of 4.0 kg. The satellite ADCS (Attitude Determination and Control Subsystem) consists of an ISIS MagneTorQuer board (iMTQ), a three-axis magnetometer and an IMU (Inertial Measurement Unit). Power is provided via four solar panels, a battery, and a control board. The BeaverCube Flight Computer (BFC) consists of a single printed circuit board designed by the BeaverCube team. Science and telemetry data are transmitted to the MIT Ground Station via UHF (ultra high frequency) radios.
BeaverCube also hosts a TILE 2 (Tiled Ionic Liquid Electrospray 2) thruster system constructed by Accion Systems Inc. in Boston, United States. The objective of this secondary payload is to demonstrate the function of electrospray technology in Low Earth Orbit (LEO).
BeaverCube CubeSat Mission
Spacecraft Launch Sensor Complement References
BeaverCube is an MIT (Massachusetts Institute of Technology) student-built 3U CubeSat mission that has two main objectives: one science objective and one technology objective. The science goal of BeaverCube is to demonstrate that it is possible to develop and apply platforms that can leverage statistical relationships between temperature and co-varying bio-optical properties, such as light absorption by colored dissolved organic matter. The technology goal of BeaverCube is to demonstrate electrospray propulsion for CubeSats, enabling more coordinated and targeted science missions among multiple spacecraft. 1)
The science objective for BeaverCube involves measuring temperature and color, which are key oceanographic properties, through a low-cost platform. Temperature and salinity are used to determine the density of water masses. This is then used to physically classify them. Thermohaline circulation is a part of large-scale ocean circulation that is driven by global density gradients created by surface heat and freshwater fluxes . 2)
Thermohaline circulation plays an important role in supplying heat to the polar regions; it influences the rate of sea ice formation near the poles, which in turn affects other aspects of the climate system, such as the albedo, and thus solar heating, at high latitudes. 2 Small- and meso-scale ocean features such as fronts and eddies can also be identified and tracked solely using sea surface temperature properties. BeaverCube will track warm core rings on the Northeastern section of the US coast, one of the regions in the world that is heating the fastest due to climate change.
Ground-based analysis techniques for measuring and recording sea surface temperature (SST) currently rely on oceanographic research vessels and moored and drifting buoys. These systems are not only resource intensive, but demand tradeoffs between spatial and temporal resolution. Non-stationary vessels and buoys are only able to capture highly accurate SST data in their immediate vicinity, thus each SST measurement made at a new location is also shifted in time. Without sufficient time resolution, analysis of SST signals such as warm core rings and other mesoscale features, which allow researchers to study marine life migration patterns and faunal blooms, is extremely limited.
One solution to this problem in oceanography is to measure SST via satellite, which facilitates the instantaneous capture of temperature data over vast swaths of ocean. BeaverCube is a 3U CubeSat designed to measure SST, cloud top temperature, and ocean color using consumer off-the-shelf (COTS) optical components and vicarious calibration techniques.
The BeaverCube development program is a collaboration between MIT STAR Lab, MIT Lincoln Lab (LL), MIT LL Beaverworks Summer Institute, The Woods Hole Oceanographic Institute, the Fall 2018 MIT 16.851 Satellite Engineering course, the Fall 2019 MIT 16.83 Space Systems Engineering course, and the Spring 2020 MIT 16.831 Space Systems Development course.
Water masses are generally classified as bottom water, deep water, intermediate water, and surface water, with subcategories representing their geographical location where they generally originate. 3) Correlations between the Chromophoric Dissolved Organic Matter (CDOM) and the sea surface temperature can be useful for both research and industry; for example, these measurements could significantly help the local fishing industry by providing indicators of the biological productivity of the region and acting as a supplement to current technology deployed to track fish migration. The northeastern coast of the USA has another special reason to be analyzed: the warming of the Gulf of Maine/New England is in the top 1% of warming rates in the world oceans. 4) Marine heatwaves are occurring more frequently and have significant impacts on the continental shelf ecosystem. Tracking impacts of extreme weather events and raising awareness could help us increase the importance of looking for adaptations and understanding of climate change impacts in the coastal ocean.
Propulsion capabilities give satellites the ability to station-keep, change orbit, and extend the lifespan of a mission. Without propulsion, the orbit of any satellite will decay until it burns up in the atmosphere. For CubeSats, the price of a propulsion system has historically been expensive in terms of the mass and power requirements Electrospray propulsion, a type of electric propulsion, has the potential to be a solution to these costs due to its small form factor and system properties. To date, there is a limited amount of in-orbit information available regarding on-board electrospray propulsion systems for CubeSat-category satellites. Information obtained from BeaverCube regarding in-orbit thrust characterization, unit behavior, and limitations could be extremely beneficial when planning future CubeSat missions and could open the door for more widespread propulsion use.
Mission overview: BeaverCube will measure cloud top and ocean surface infrared emissions and visual wavelength spectrum emission of the same ground path. Figure 1 shows one example of satellite data usage: IR and VIS data were combined to track excess soils, sediments, decaying leaves, pollution, and other debris after Hurricane Florence in 2018.
![Figure 1: Combined VIS and IR data used to track debris after Hurricane Florence in 2018 [image credit: P. Fucile (WHOI)]](https://eoportal.org/ftp/satellite-missions/b/BeaverCube-040621/BeaverCube_Auto10.jpeg)
The goal of BeaverCube is to demonstrate the use of a CubeSat platform to gather important ocean and atmospheric measurements using commercially available, relatively low-cost components. Cost reduction enables an increase in the quantity of satellites in orbit, which would significantly increase the spatial and temporal coverage of the measurements.
BeaverCube supports teaching and outreach. The team that is developing and building the spacecraft is composed of undergraduate and graduate students at the Massachusetts Institute of Technology. BeaverCube has also supported outreach projects focused on high-school students, such as the MIT Lincoln Lab Beaver Works Summer Institute and the MIT Media Lab Climate CubeSat Co-build.
Spacecraft
BeaverCube will demonstrate the use of the Tiled Ionic Liquid Electrospray (TILE 2) thruster system technology, developed and manufactured by Accion Systems, Inc. The demonstration of the electrospray propulsion capability is planned using an orbit-raising maneuver, which can be detected via GPS position measurements.
The mission has two main objectives:
1) Prove the utility of a CubeSat platform to gather measurements using relatively low-cost cameras;
2) Demonstrate operation of Tiled Ionic Liquid Electrospray (TILE 2) propulsion technology provided by Accion Systems for orbital maneuvering.
From the main objectives, the following Level 1 Technical Requirements are derived:
• BeaverCube shall successfully capture a minimum of 20 IR and 10 VIS images of the Earth.
• BeaverCube shall measure sea surface temperature and cloud top temperature.
• BeaverCube shall measure ocean color.
• BeaverCube shall transmit data to and receive commands from the MIT UHF ground station.
• BeaverCube shall operate for 90 days.
• BeaverCube shall perform post-hoc calibration for the camera payloads using vicarious calibration and cross calibration.
• BeaverCube shall geolocate the captured IR and VIS images.
• BeaverCube shall demonstrate operation of an ion electrospray propulsion system.
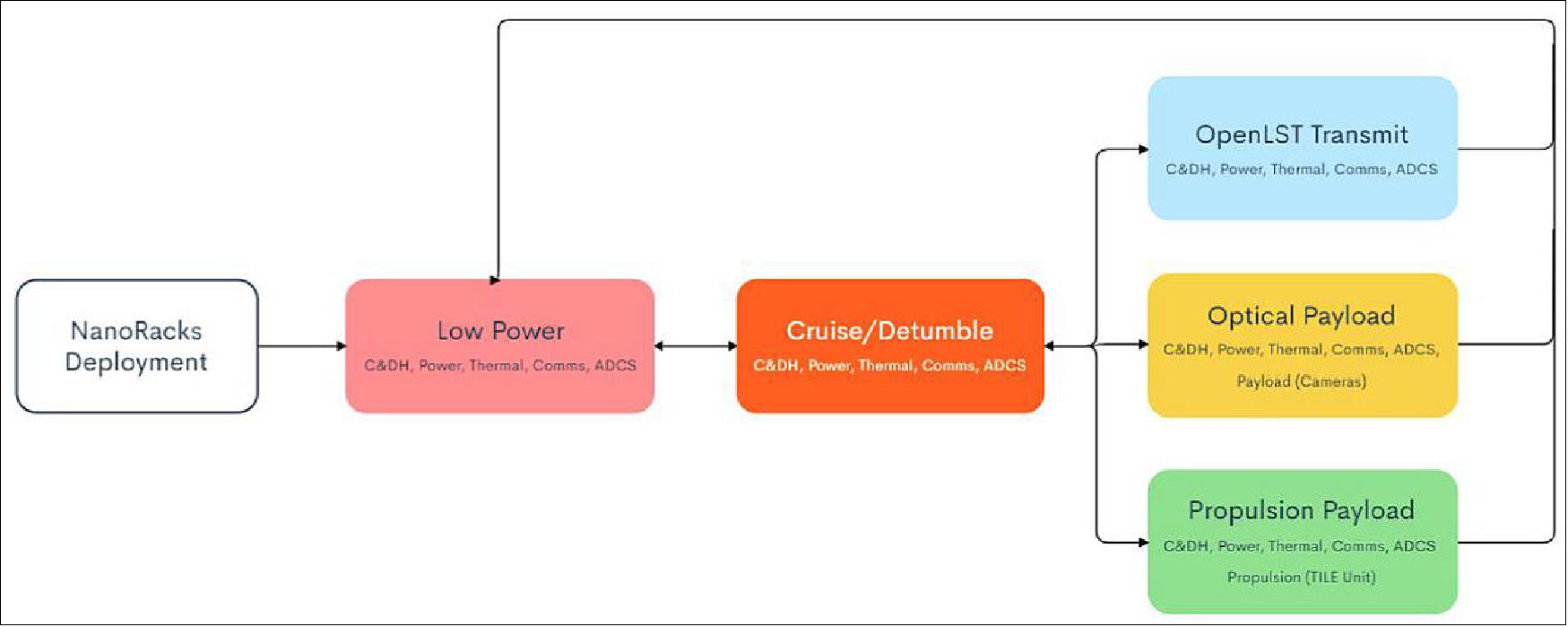
Concept of Operations
After successful deployment from the NanoRacks CubeSat Deployer on the ISS, BeaverCube will enter low power mode where its batteries will be charged, and the flight computer and heaters will receive power from the EPS (Electrical Power System). After 45 minutes the primary antenna (ISIS Dipole Antenna) is deployed. Once a ground command is received, the rest of the subsystems will be powered on as required to
detumble the spacecraft. After detumbling, BeaverCube will enter one of three modes: 1) OpenLST transmit mode, 2) imaging mode, or 3) propulsion payload mode. These modes will be initiated via ground command after BeaverCube is sufficiently far from the ISS such that it is no longer a re-contact hazard. Note that if a fault occurs in any of these modes, BeaverCube can revert to a low power mode (which acts as an overall safe mode) to troubleshoot any issues.
OpenLST transmit mode allows BeaverCube to downlink telemetry and images taken from the onboard cameras to a ground station below. This mode orients BeaverCube such that the main lobes of the ISIS Dipole Antenna point nadir (-z face points nadir per Figure 2).
Optical payload mode orients BeaverCube such that the onboard cameras point nadir (+x face points nadir). This allows for the optical payload to fulfill the imaging mission requirements.
Propulsion payload mode puts BeaverCube in the same orientation as the optical payload mode (+x face points nadir). This allows the propulsion system to point along the velocity vector of BeaverCube to accomplish any orbit raising maneuvers that are necessary. A5) visual representation of these modes is shown in Figure 3.
The current best estimate (CBE) total mass of BeaverCube is 4.0 kg. A maximum mass of 4.8 kg is allowable per the NanoRacks CubeSat deployer specifications. The only deployable onboard is the ISIS Dipole Antenna.
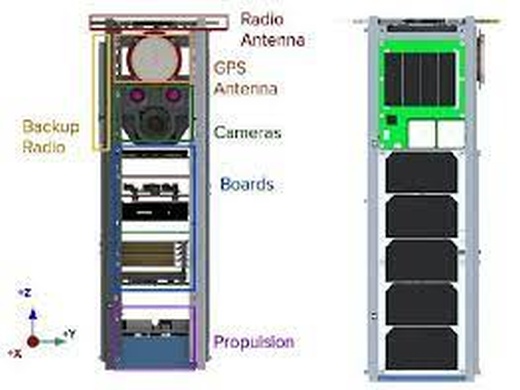
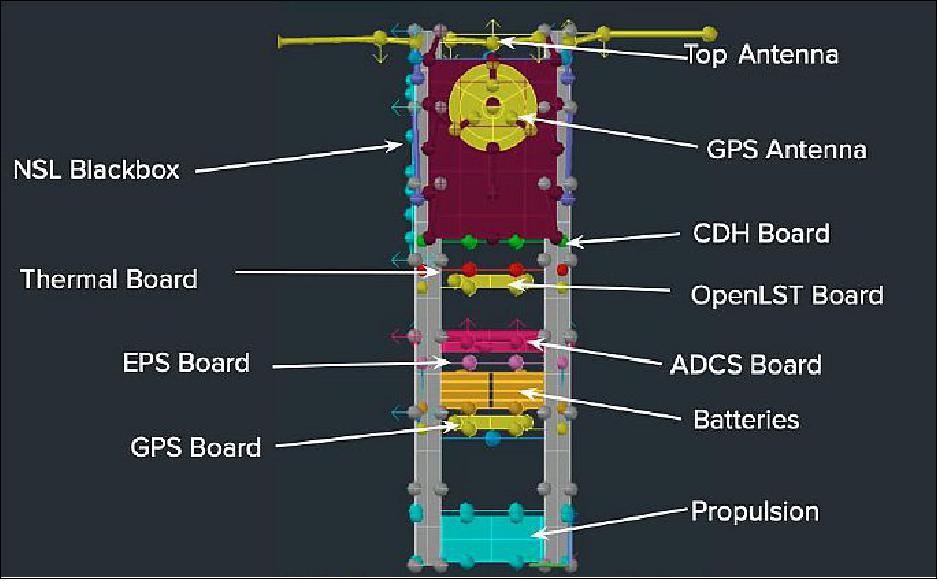
Structures and Thermal: The CubeSat structure is intended to constrain components in the appropriate location and provide housing that will allow the subsystems to withstand environmental loads. The payload needs to be able to face nadir, while the propulsion unit needs to point in the opposite direction to the spacecraft velocity vector. The primary radio antenna has greatest gain in the direction parallel to the orbit vector. Figure 4 shows the configuration of the spacecraft that achieves these requirements. The GPS antenna location is constrained by the solar panel location. Note that the payload and the propulsion unit are spaced so the center of mass of the CubeSat stays within 6 cm of the geometric center, as established in one of the payload functional requirements. The rails, top cap, mid plates, and wall panels (placed underneath the solar panels) provide mechanical integrity and rigidity to the assembly.

Custom brackets were designed for the boards, propulsion module and cameras. The designed 6061 and anodized to resist the oxidizing space environment. The head of the stainless-steel fasteners are staked in place using 3M epoxy 2216 as a secondary locking feature.
After designing the BeaverCube structure, a thermal analysis was performed to ensure that all components would remain inside their operational and survival temperature limits. The thermal model was built in Thermal Desktop using a simplified version of the BeaverCube structure, shown in Figure 5. As boundary conditions, the spacecraft orbit was set to be similar to the ISS orbit and the electronics and other heat generating components inside the spacecraft were set to follow the designed power modes. The main output from the program were the maximum and minimum temperature levels of each component.
The first simulation demonstrated that three heaters were necessary: one for the visual camera, one for the propulsion unit, and one for the communications board. Even though the heaters’ power consumption changes as a function of the power mode under analysis, the maximum average power consumption was calculated to be about 2.2 W. This was enough to bring the radio board, the visual camera, and the thrusters above their operational temperature thresholds at all times.
To measure the temperature of the most critical components, RTDs (Resistance Temperature Detectors) are used. The RTDs readouts and the heaters’ control are managed by the thermal daughterboard, which will use a pulse width modulation (PWM) signal to drive the heaters and a serial peripheral interface (SPI) to communicate with the spacecraft main computer.
EPS (Electrical Power System): The BeaverCube power system is composed of 4 solar panels, a battery, and a control board. Two of the solar panels are 3U and the other two panels are 2U because of the payload and the communications system location requirements. The average generated power level will be about 8 W. The power from the battery is converted into three separate voltage lines (12 V, 5 V, and 3.3 V) to accommodate all the spacecraft equipment. To ensure the satellite will not turn on before leaving the deployer, three battery inhibit switches are mounted on the CubeSat rails and keep the electric circuit open when actuated. Figure 6 shows the power block diagram, indicating the different voltage levels required by each component.
BeaverCube power modes are: low power, detumble,optical payload on, propulsion on, and OpenLST (primary radio) transmit, as shown in Table 1. The table also shows the estimated total power consumed at each power mode. To ensure the power budget will be positive, for each three orbits performed with payload turned on, two orbits will be performed in cruise mode.
Low Power (survival) | Cruise/Detumble (ADCS) | Payload on (science) | Propulsion on (maneuver) | Open LST Transmit |
ADCS* | ADCS | ADCS | ADCS | ADCS |
7.1 W | 8.0 W | 10.6 W | 11.0 W | 8.0 W |
To protect the battery from undervoltage, the EPS (Electric Power System) shuts down the supply lines if the battery goes below 6.144 V and turns back on when the battery has charged back up to 7 V. The current leaving the battery is monitored and, if current draw is above the safety limit of 1.5 A on the 12 V lines and 4.5 A on the 3.3 V and 5 V lines, the EPS will shut down the power line to protect the battery. The EPS is also capable of turning off specific lines to power cycle each voltage regulator if necessary.
As a precaution against latch-ups and single-event upsets, the EPS is equipped with a watchdog timer. If the flight computer stops communicating with the EPS for longer than the watchdog period (4 minutes by default), the EPS will automatically reboot the satellite. The BlackBox radio, which has its own independent power supply, can be directly commanded from the ground to reboot the satellite as a last resort.
ADCS (Attitude Determination and Control Subsystem): Measuring and controlling the orientation of a satellite is critical for imaging payloads. The ADCS in CubeSats is constrained by strict weight and size limits. BeaverCube uses three magnetorquers: two torque rods and one air coil torquer onboard the ISIS MagneTorQuer board (iMTQ). The iMTQ has a magnetic field range of ±63 mT and a resolution of 15 nT.
The attitude is determined using a 3-axis magnetometer, combined with an IMU (Inertial Measurement Unit) and the onboard solar panels serving as coarse sun sensors. GPS data is used to account for position dependency in the Earth’s magnetic field and the relative position of the sun.
The readings from the sensors are fed into an EKF (Extended Kalman Filter), which combines sensor data to produce an estimate of the satellite’s true orientation, angular velocity, and sensor biases. The estimated state, composed of the orientation and angular velocity, is compared to a reference state to drive a PID controller controlling the magnetorquers. Figure 7 shows a diagram of these software steps, embedded inside the simulation that is used to verify and calibrate ADCS. A Simulink model with plugins from STK and MATLAB simulates the dynamics of BeaverCube as a physical system.
Monte Carlo simulations show that, using the Bdot detumbling algorithm, BeaverCube will meet the mission requirement to detumble in fewer than 5 orbits. These simulations (shown in Figure 8) were performed under worst-case conditions, including setting the magnetic B field at orbit minimum and adding 50 nT noise.
These simulations will be refined as the project continues, using data collected from the engineering model and the model’s physical properties. A Helmholtz cage will be used to test the magnetometer readings and validate the magnetorquers’ output.
C&DH (Command & Data Handling): The BeaverCube Flight Computer (BFC) consists of a single printed circuit board, which was designed by the BeaverCube team, based on prior work done on the payload computer for the DeMi CubeSat. 6) The BeaverCube Flight Computer is based on the common Raspberry Pi single-board-computer system. The BeaverCube Flight Computer hosts two Raspberry Pi Compute Module 3 boards. The two modules are used for redundancy, and in the event of failure of one module, the spacecraft will automatically fall back to the other, after expiration of a watchdog timer.
In addition, each compute module is connected to two SD cards which host identical copies of the flight software on launch. A primary SD card will be selected upon power up to run flight software, while the second is mounted to the compute module as an external device and can be read or written to. In the event that the primary SD running flight software fails, the second SD card will be used to boot the compute module and begin running flight software. The failed SD will then be mounted as an external device.
The BFC hosts a total of two Raspberry Pi Compute Modules, and four SD cards, assigned in pairs to each Compute Module. All data lines connecting to the BFC are multiplexed such that data can be provided to either Compute Module, depending on which is active for the
boot of the BFC. The data block diagram containing all BFC data lines can be seen in Figure 9.
Communications: To transmit the science and telemetry data to the MIT Ground Station, the spacecraft has two onboard radios. The primary radio is a modified version of the Planet OpenLST radio. 7) This is a UHF radio, which communicates at 9600 baud to the MIT UHF Ground Station, which is located on MIT campus. Campus access to the ground station allows the spacecraft to be directly commanded by the student team. The radio is connected to an ISIS Dual UHF Dipole antenna, which is a deployable commercial antenna solution. This radio is used for all nominal communications with the spacecraft.
In addition to the OpenLST, a NearSpace Launch BlackBox is incorporated into the spacecraft. which is capable of receiving a ground command from the NearSpace Launch ground station, located in Illinois, and reset the spacecraft bus in an emergency situation. The BlackBox radio is only used for survival of the spacecraft. BeaverCube is able to downlink a very small amount of data 18 bytes every 15 minutes through this radio, therefore this is reserved for critical health data, such as battery voltages, battery temperature and voltage line currents. It is not practical for downlinking any science data or other mission-critical data.
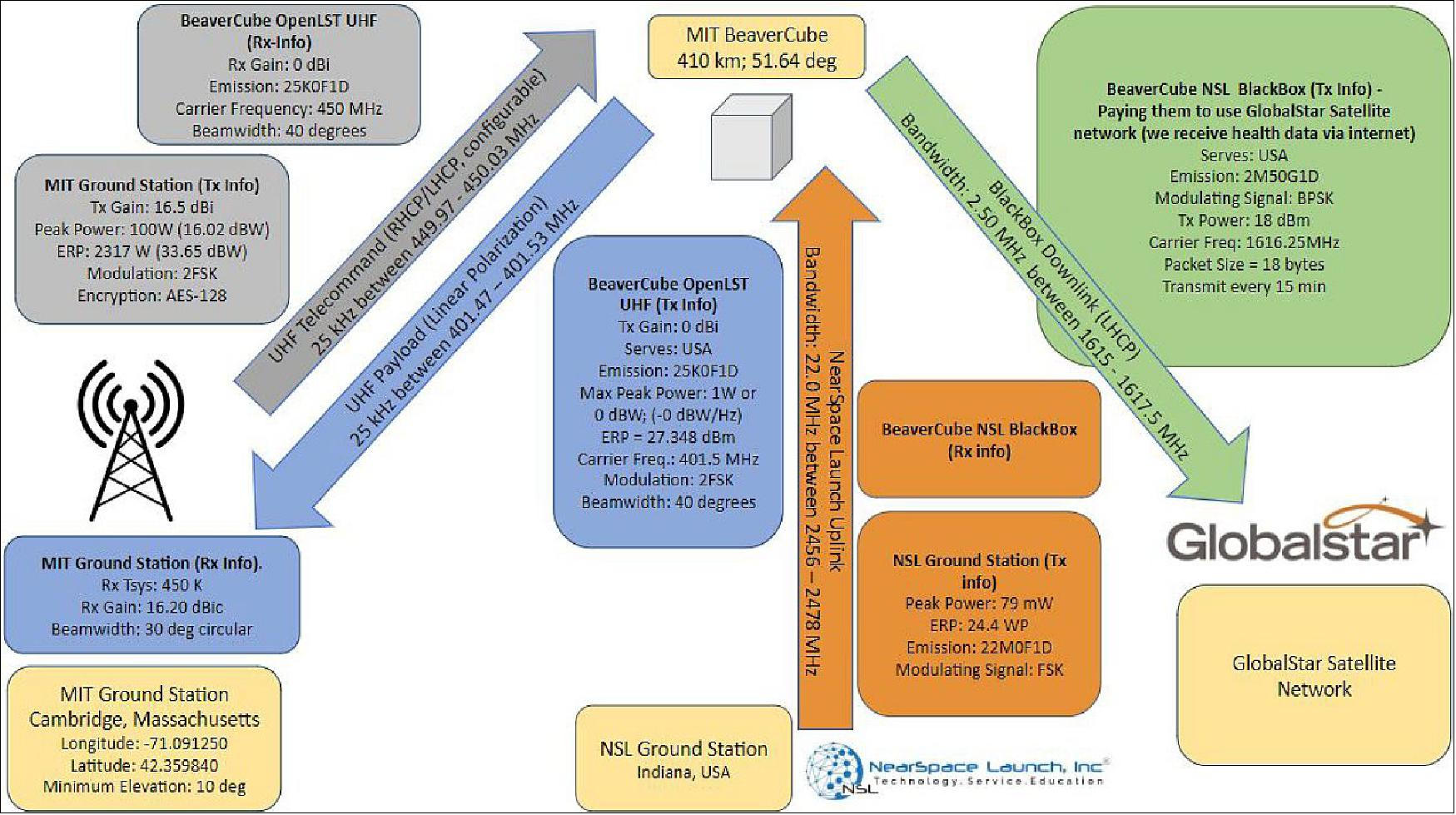
The modified OpenLST’s output includes two standard SMA connectors which are used for transmitting and receiving signals. Each SMA is connected to a separate dipole antenna on the ISIS module. The OpenLST defaults to a receive mode using one of the antennas, and switches to the other for transmission. . The OpenLST then communicates with the BFC through a UART connection. This UART connection is carried on the PC/104 header.
Table 2 shows the link budget analysis performed for the primary UHF radio. The critical link (minimum power availability) is the downlink, which was analyzed for both a best case and a worst case scenario. Even in the worst case, there is still 6.33 dB of margin on the downlink, which is above the required 3 dB and means we should be able to close the link with the satellite.
| Downlink | Uplink | ||||
Parameter | Symbol | Units | Worst Case | Beast Case | Worst Case | Best Case |
Range | R | km | 1640.00 | 410.00 | 1640.00 | 410.00 |
Transmitter gain | Gt | dBi | -3.00 | 0.00 | 13.00 | 16.50 |
Receiver gain | Gr | dBi | 13.00 | 16.20 | -3.00 | 0.00 |
Bit rate | Rb | bit/s | 2400.00 | 2400.00 | 2400.00 | 2400.00 |
Probability of bit error | Pbe | 1/bits | 10-5 | 10-5 | 10-5 | 10-5 |
Margin Eb/N0 | N/A | dB | 6.33 | 24.57 | 25.28 | 43.86 |
BeaverCube is operating on a scientific FCC License 24 and will be transmitting space to Earth at 401.5 MHz (scientific band) and transmitting Earth to space at 450 MHz (aerospace control band) through the primary radio system. These are shown respectively as blue and gray in the schematic above. The secondary radio system (NSL BlackBox) will transmit health telemetry data at 1616.25 MHz to the GlobalStar satellite network and receive ground station commands from the NearSpace Launch (NSL) Ground Station at 2467 MHz.
Propulsion System
The technology demonstration payload on BeaverCube is a TILE 2 (Tiled Ionic Liquid Electrospray 2) thruster system constructed by Accion Systems, Inc., Boston, MA. The objective of the secondary payload is to demonstrate the function of electrospray technology in Low Earth Orbit (LEO). This demonstration will consist of performing translational maneuvers. System thrust will be calculated during the maneuver to confirm the system performs as expected. The mission must also demonstrate that a CubeSat having this payload does not pose a risk to the ISS, either as a recontact hazard or as a chemical hazard. This is ensured by having an adequate number of inhibits that prevent inadvertent firing. In addition, BeaverCube’s location will be continuously monitored to ensure firing commands will only be given when there is no risk of interception with other satellites. Qualification testing must also be performed to ensure the adequate containment of propellant.
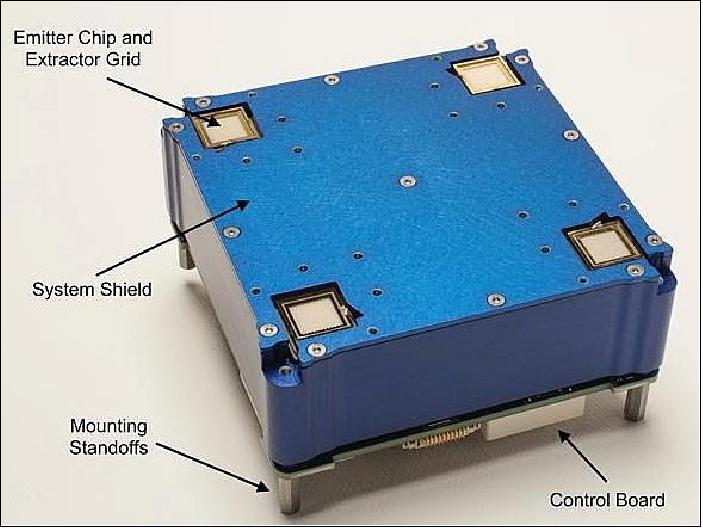
The TILE 2 electrospray thruster is a type of electric propulsion. This system consists of a propellant reservoir, an emitter chip, and an extractor grid. The porous emitter chip, covered in many sharp emitter tips, is wetted with propellant from the reservoir. The extractor grid is located directly above the emitter chip with holes aligned with the tips on the emitter chip. Voltages between 1 and 2kV are applied between the emitter chip and the extractor grid, creating an electric field. The electric pressure from this field overcomes the surface tension in the liquid at the emitter tips, evaporating single and solvated ions. The resulting ion beam is accelerated across the electric field, which produces thrust.
Electrospray propulsion is particularly useful for small satellites due to the properties of the propellant source, the high specific impulse, and the high thrust density. 8) Ionic liquids are well suited for storage and use in space due to their low melting points and negligible vapor pressures. 9) This eliminates the requirement for large propellant containment hardware. High specific impulse and thrust density allow for large ΔV missions with small amounts of propellant, further reducing the size required for the system.
Mass (including propellant) | 480 g |
Size of instrument | 9.58 x 9.58 x 4.6 cm (0.5U) |
Thrusters | 4 |
Propellant | Ionic liquid |
Max thrust | 50 µN |
Isp | 1800 s |
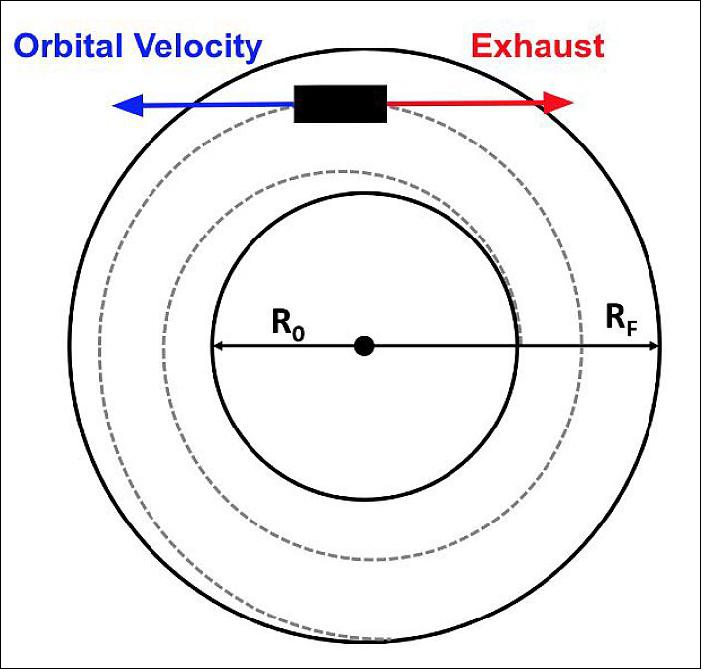
Demonstration of the capabilities of the Accion TILE 2 electrospray system will consist of a series of translational maneuvers, also known as orbit-raising maneuvers. Translational maneuvers are performed by firing the propulsion system antiparallel to the orbital velocity vector. This results in a spiral orbital trajectory until the final altitude is reached, as seen in Figure 12.
Firing antiparallel to the orbital velocity vector requires active attitude control to keep the thruster pointed in the direction for optimal thrust. The pointing requirement for the propulsion system is similar to that of the imaging payload, reducing complexity for the ADCS subsystem.
Translational maneuvers will be performed by firing all four of the TILE 2 thrusters for 3.5 hours. This will yield an altitude change of approximately 280 meters (Ref. 5). This duration was chosen to maximize the likelihood of detecting the maneuver, and to reduce the errors in the system thrust calculation. Maneuvers will be detected by comparing results from the Global Positioning System (GPS) receiver onboard BeaverCube to orbital simulations in Systems Tool Kit (STK) by Analytical Graphics, Inc. The demonstration will be considered successful if the maneuver results in an altitude change that is 3 standard deviations above the expected GPS accuracy. Simulations in STK show that the expected GPS accuracy is approximately 3 meters. The total thrust will be approximated by the change in GPS recorded orbital velocities divided by the duration of the maneuver. This approximation is valid for low-thrust maneuvers where the orbit remains nearly circular during the maneuver.
Use of the propulsion system will not be initiated until a) the CubeSat has attempted imaging and downlinking images and b) approval for maneuvering is granted by the ISS program and the Combined Space Operations Center (CSpOC). Once these criteria have been satisfied, propulsive maneuvers will be made on a routine basis until the resultant orbital change can be detected with BeaverCube’s onboard GPS unit. Each translational maneuver will be singly commanded from the ground station. The validity of each command will be verified by the on-board computer before continuing with firing procedures.
Launch
The BeaverCube 3U CubeSat was launched on the SpaceX CRS-22 cargo mission on a Falcon 9 Block 5 vehicle from LC39A at KSC in Florida. Liftoff was on 03 June 2021 at 17:29 UTC (1:29 EDT) . - The Dragon separated from the rocket’s upper stage 12 minutes after liftoff. The total cargo on CRS-22 had a mass of 3328 kg. The total pressurized mass was 1948 kg, while the unpressurized payloads had a mass of 1380 kg. 11)
Orbit: BeaverCube will be deployed from the International Space Station (ISS) at an orbit of approximately 410 km of altitude and 51.6° of inclination.
Passenger CubeSat Payloads (ELaNa-36) on the SpaceX CRS-22 Mission
ELaNa-36 (Education Launch of Nanosatellites-36) is part of NASA's CSLI (CubeSat Launch Initiative) mission.
• Alpha, a 1U CubeSat technology demonstration mission of Cornell University, Ithaca, New York (deployment of a 1 x 1 m light sail with four tiny “chipsats” called Sprites attached)
• ARKSAT-1, a 1U CubeSat technology demonstration mission of the University of Arkansas, Fayettville, Arkansas (to demonstrate LEO-to-Earth atmospheric composition measurements using an on-board xenon flash bulb as the calibrated source for ground tracking)
• BeaverCube, a 3U CubeSat technology demonstration mission of MIT (Massachusetts Institute of Technology), Cambridge, MA
• CaNOP (Canopy Near-IR Observing Project), a 3U CubeSat of Carthage University, Kenosha, Wisconsin. The CaNOP science mission is to obtain medium-resolution images of global forest canopies with spectral resolution of 10 nm across the visible and near-infra-red.
• CAPSat (Cooling, Annealing, Pointing Satellite), a 3U CubeSat a technology demonstration mission of University of Illinois at Urbana–Champaign. Objective: CubeSat navigation and control.
• EagleSat-2, a 3U CubeSat mission of Embry–Riddle Aeronautical University, Daytona Beach, Florida. Objective: scientific investigation focused on detecting cosmic ray particles and studying the effects of solar radiation on various types of random access memory in a memory degradation experiment.
• PR_CuNaR2 (Puerto Rico CubeSat NanoRocks-2), a 3U CubeSat scientific investigation of the International American University of Puerto Rico - Bayamón Campus, Bayamón, Puerto Rico. The objective is to increase understanding of the outcomes of relevant collisions among millimeter-sized particles, or “pebbles”, in a protoplanetary disk.
• RamSat, a 2U CubeSat education mission of Oak Ridge Public Schools (Robertsville Middle School), Oak Ridge, Tennessee.
• Stratus, a 3U CubeSat science investigation mission of Michigan Technological University, Houghton, Michigan. The objective is of measuring cloud fraction, cloud top height, and cloud top wind with performance comparable to the best data obtained from NASA’s flagship Earth-observing spacecraft.
Sensor Complement
The payload subsystem consists of two FLIR Boson Long-Wave Infrared (LWIR) cameras and one MatrixVision BlueFox Visible Spectrum (VIS) camera. BeaverCube will capture both LWIR and visible spectrum images of the continental shelves in New England and Cape Hatteras. A filter in the 11.5-12.5 µm (M16) band will be installed on the infrared cameras in order to isolate the peak IR emissions from the sea surface. Calibration will be performed vicariously using data from oceanographic buoys, and with cross calibration using satellites intersecting BeaverCube’s orbital path.
Note: FLIR Systems Inc., with HQs in Wilsonville Oregon, specializes in the design and production of thermal imaging cameras, components and imaging sensors. Founded in 1978, the company produces thermal cameras and components for a wide variety of commercial and government applications. The company FLIR took its name from the acronym for FLIR (Forward-Looking Infrared).
Two important oceanographic features in the ocean in the northeastern United States are the Shelfbreak Front and Warm Core Rings. The Shelfbreak Fronts separates generally cold, fresh waters of the continental shelf from warm, salty waters of the continental slope. Warm core rings are large anti-cyclonic (clockwise) eddies ranging from 50-100 km in diameter that are formed from the Gulf Stream. 12) Both the shelf break fronts and warm core rings are large enough to resolve with the ground resolution of the LWIR camera.
Operational Phases: The payload has three operational modes: ground station (GS) pass, imaging, and post processing.
During a GS pass, a command will be sent to BeaverCube with a timestamp indicating when an image should be taken, and the GPS location of the image target. This information will be used to dictate when the payload should be powered on by the on-board computer and to determine the spacecraft attitude. Once payload has completed an imaging phase, images will be bundled with auxiliary information, saved locally to the flight computer, and downlinked.
The imaging phase consists of warming up the cameras to operating temperatures, opening shutters, capturing dark frames, and capturing images. The on-board computer will supply power to the LWIR and VIS cameras approximately 10 minutes prior to the specified image capture time. Resistance temperature detectors (RTDs) on the camera housing will measure the camera temperatures, and will turn on heating pads if the cameras are below operating temperatures. Once cameras reach operating temperature, the flight computer will capture dark frame images on all cameras. Scientific images are then taken by all three cameras. Immediately after image capture is complete, all camera shutters are closed to reduce the risk of sun exposure. Images and auxiliary data will be packaged and stored on the flight computer for downlink. Once data is stored, cameras will be powered down.
Prior to uplink, ground station personnel will use the BeaverCube flight path model in conjunction with NOAA weather predictions to determine which targets to image in subsequent passes. Calibration images of specified targets will be taken during the imaging phase and downlinked during the next available GS pass. In-situ temperature and ocean color measurements for vicarious and cross calibration will be acquired post-hoc at the time specified in the image auxiliary data.
Post-hoc calibration of both the IR and VIS cameras is essential in order to obtain absolute measurements of color and temperature of the sea surface. Camera calibration corrects for atmospheric attenuation, varying weather conditions, internal camera drift, and other factors that can affect the raw image. BeaverCube will utilize two methods of calibration to support both the IR and VIS cameras: vicarious calibration and cross calibration.
Vicarious calibration is the process of using one or more pre-calibrated external sensors for ground truthing, such as temperature sensors on oceanographic buoys for IR calibration. Cross calibration takes advantage of images taken by other satellites with calibrated cameras crossing over BeaverCube’s orbital path. Satellites used in cross calibration must be imaging in the same spectral bands and must be both coincident and co-located when taking an image.
Camera Selection
The FLIR System's Boson Long Wavelength Infrared (LWIR) camera is a relatively low-cost thermal imaging camera that uses an uncooled vanadium oxide microbolometer array. This camera was chosen for its commercial availability, spectral range, spatial resolution and low mass characteristics. The FLIR Boson camera sensor and lens has a mass of <38 g. 13) The low mass allows two of these cameras to be incorporated into the payload design. One camera will take control images while the other will take images using the selected M16 optical blocking filter.
FLIR (Forward Looking Infrared) Camera: The Boson® longwave infrared (LWIR) thermal camera module sets a new standard for size, weight, power, and performance (SWaP). It utilizes FLIR infrared video processing architecture to enable advanced image processing and several industry-standard communication interfaces while keeping power consumption low. The 12 µm pitch Vanadium Oxide (VOx) uncooled detector comes in two resolutions – 640 x 512 or 320 x 256. It is available with multiple lens configurations, adding flexibility to integration programs.

The LWIR camera has a spectral range of 7.5 - 13.5 µm, which corresponds to the temperatures -59 to +113°C. This temperature range captures the global SST (Sea Surface Temperature) average at 16.1°C 14) 15) which corresponds to IR emissions at 10 µm. A buffer of approximately 3 µm from the average SST emission allows for variation of up to ± 70°C, far greater than the expected variability in SST across the geographical regions of interest. Additionally, the LWIR camera has a focal length of 13.5 mm and a 16° field of view (FOV), providing ground resolution of 348 meters and a footprint of 9911 km2 at an orbital altitude of 400 km and 51.6°.
The mvBlueFOX-IGC (200w) visual (VIS) sensor with the Kowa LM16JC lens is a commercial camera chosen for its cost, image quality, and ease of operation. The detector is a Complementary Metal Oxide Semiconductor (CMOS) sensor. The Kowa lens has a fixed focal length of 16mm and lens and has a ground resolution of 150 m (calculations in the appendix). The VIS camera sensor weighs 80 g 7 and the Kowa LM16JC lens weighs 55 g.
Infrared Filters: In order to mitigate cloud interference on SST infrared readings, a filter is incorporated into one LWIR camera to attenuate cloud-top temperature from the scene. The selected M16 filter sourced from Electro Optical Components isolates the 11.5 - 12.5 µm spectral range in order to reduce cloud noise.
The selected filter is a Germanium Fabry-Perot interferometer, which consists of a stack of mirrors, dielectric material, and glass that will allow for transmission of certain wavelengths. 16) Constructive interference of light allows for certain wavelengths to pass through the stack of substrates. In this case, wavelengths in the M16 band are filtered through when the light is both normal and collimated with respect to the position of the filter. The filter is equipped with anti-reflective coatings to mitigate the narcissus effect. The narcissus effect is a ghosting effect resulting from light reflecting from an optical surface back into the detector, and is caused by temperature differentials between the detector and the ambient environment.
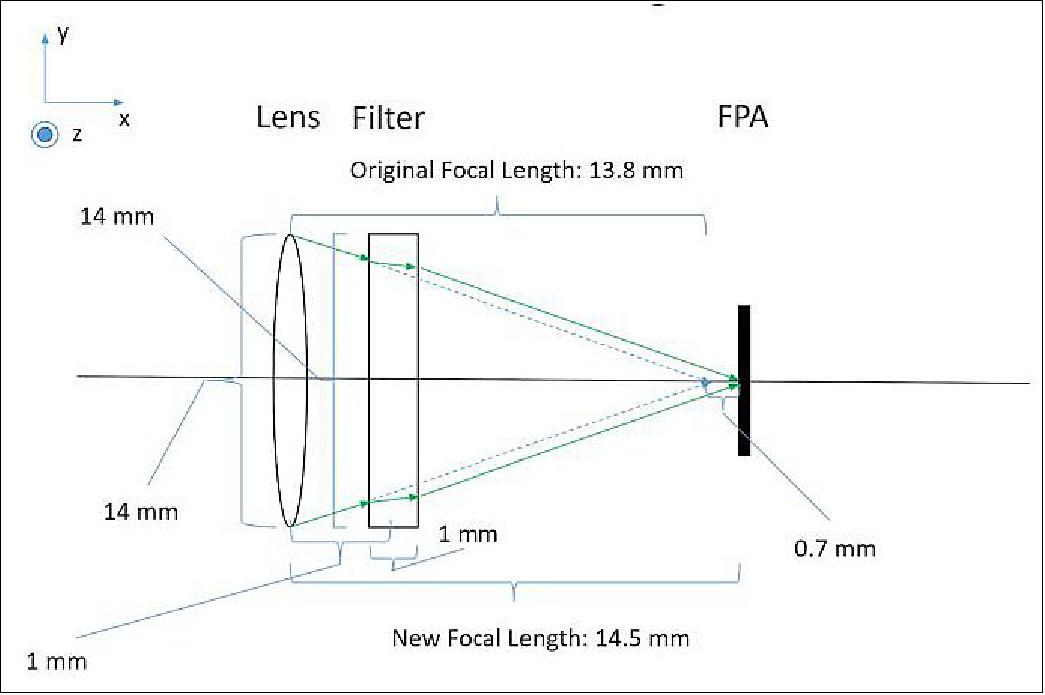
The placement of the filter behind the lens causes the focal length of the LWIR camera to shift from 13.8 mm to 16.85 mm (Figure 14). The lens position will be modified in order to correct for this shift in focal length.
Environmental Survival: The most extreme expected environmental conditions range from -45°C to 65°C with a pressure of 10-8 Pa. The LWIR camera is capable of operating within the temperature range of -40°C to 80°C, while the VIS camera is capable of operating in the temperature range of 0°C to 45°C. 17) This camera is also being integrated on another MIT CubeSat mission, the CLICK (CubeSat Laser Infrared CrosslinK). 18)
A preliminary thermal vacuum environmental readiness check was achieved in the form of a high altitude balloon (HAB) test. The test was performed in upstate New York on November 23, 2019. The HAB payload consisted of one FLIR Boson LWIR camera and a Raspberry Pi (NoIR) camera. The balloon travelled to an altitude of approximately 100,000 feet during its two-hour ascent, experiencing a minimum pressure of 0.162 psi (0.01% bar), simulating near-space conditions.
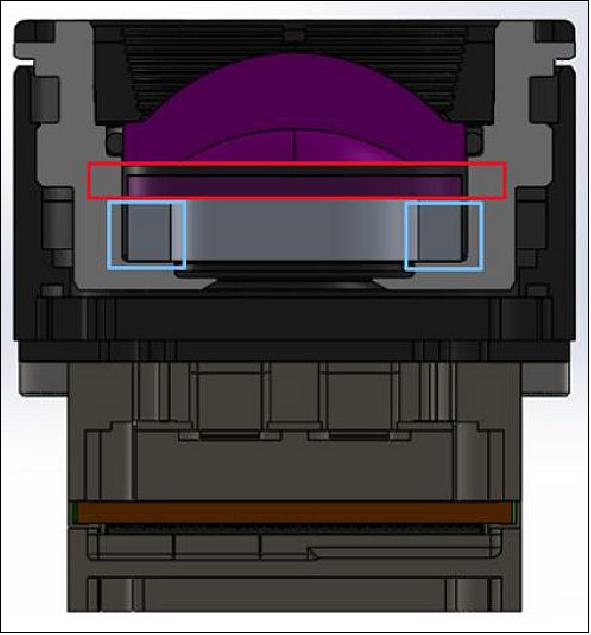
Structural Integration: The two LWIR cameras are installed side-by-side in the CubeSat with a center-to-center distance between the cameras of 36 mm. Both LWIR cameras sit directly above the VIS camera, secured by a single aluminum plate. The plate is wedged between the lens assembly and LWIR camera body, supporting the cameras to prevent cantilevering. The VIS camera is centered below both LWIR cameras, located further back to accommodate the attached KOWA lens. The rear face of the camera body is secured to the back plate of the payload assembly. The cameras are placed far enough back that the rails do not interfere with the field of view (FOV) of the cameras.

One LWIR camera will be modified to include the external M16 filter, while the other LWIR camera (unmodified) will take a control image. In the modified camera, the filter will sit directly behind the lens. A custom aluminum ring machined to fit inside the camera will keep the lens in place. The filter is cut to a 15.5mm diameter to fit inside the cavity. The filter is attached to the aluminum ring with room temperature vulcanizing silicone-566 (RTV). The RTV will allow for the thermal expansion and contraction of the aluminum ring. The camera cross-section in Figure 16 outlines the location of the mounting ring in blue and the filter in red.
Electrical Interface: A single LWIR image contains 819 kB of data, while a single VIS image contains 360.1kB of data. The LWIR camera utilizes a JST to 4-pin-out interface for command and control, with an internal power supply of 3.3V. The VIS camera utilizes a 4-pin circular locking connector and interfaces to the flight computer board via a 4-pin out connector, which provides an operating power supply of 5 V.
To ensure that 50% of the image frame overlaps between simultaneously triggered images, the cameras must be able to take images within 12 ms of each other. The camera signals are gated through p-channel MOSFETs on the BeaverCube Flight Computer (BFC). The timing between signals is empirically determined and adjusted.
Calibration: The LWIR camera uses automatic non-uniformity corrections (NUC) to ensure each pixel is producing a uniform output. The camera will be operated in the automatic gain mode, which allows the camera to optimize the appropriate correction mechanism to minimize any non-uniformities. Flat-field correction (FFC) will be continuously implemented during camera operational mode. FFC exposes the camera to a “uniform thermal scene” to update the NUC table outputs to adjust the image for thermal drift.
Vicarious calibration with buoy targets for the LWIR camera allows for spatial and temporal calibration of the LWIR microbolometer. The vicarious calibration process will determine the gain factor for the image area in the vicinity of the buoy by comparing the water skin temperature (top 1 mm of water, calculated with a transfer function) with the infrared imaged buoy-site. By analyzing gain values over time for each part of the image, microbolometer variation can be detected and corrected.
Cross calibration of the VIS camera is necessary in order to produce absolute color measurements for identification and analysis of phytoplankton blooms and Color Dissolved Organic Matter (CDOM) in the ocean. The VIS camera uses CMOS sensor, which can have inconsistent response across color channels, cross-talk over color channels, and exhibit non-linearities at the extremes of its spectral range. While the mvBlueFOX CMOS sensor is supplied with automated gain, white-balance, and exposure calibrations, these do not produce absolute color measurements without the use of external calibration. BeaverCube will perform absolute color calibration using cross calibration with satellite constellations such as GOES or Landsat.
References
1) Paula do Vale Pereira, Madeline Garcia, Madeleine Schroeder, Humberto Caldelas, Charles Lindsay, Alex Choi, Kaila Pfrang, Amelia Gagnon, Patrick McKeen, Jim Clark, Thomas J. Murphy, Christian Haughwout, Kerri Cahoy, ”BeaverCube: Coastal Imaging with VIS/LWIR CubeSats,” Proceedings of the 34th Annual AIAA/USU Virtual Conference on Small Satellites, August 1-6, 2020, Logan, UT, USA, paper: SSC20-V-03, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4728&context=smallsat
2) NASA Goddard Space Flight Center, Scientific Visualization Studio, “ The Thermohaline Circulation - The Great Ocean Conveyor Belt,” 08 October 2009, URL: https://svs.gsfc.nasa.gov/3658
3) W. J. Emery, Water Types and Water Masses, ” Ocean Circulation, pp: 1556-1567, 2003, URL: https://curry.eas.gatech.edu/Courses/6140/ency/
Chapter11/Ency_Atmos/Ocean_Circ_Water_Types_Masses.pdf
4) Andrew J. Pershing, Michael A. Alexander, Christina M. Hernandez, Lisa A. Kerr, Arnault Le Bris, Katherine E. Mills, Janet A. Nye, Nicholas R. Record, Hillary A. Scannell, James D. Scott, Graham D. Sherwood, Andrew C. Thomas, ”Slow adaptation in the face of rapid warming leads to collapse of the Gulf of Maine cod fishery,” Science, 13 November 2015, Vol. 350, Issue 6262, pp. 809-812, https://doi.org/10.1126/science.aac9819, URL: https://science.sciencemag.org/content/sci/350/6262/809.full.pdf
5) Madeleine Schroeder, Christopher Womack, Amelia Gagnon, "Maneuver Planning for Demonstration of a Low-Thrust Electric Propulsion System," Proceedings of the 34th Annual AIAA/USU Virtual Conference on Small Satellites, August 1-6, 2020, Logan, UT, USA, paper: SSC20-VII-02, URL: https://digitalcommons.usu.edu/cgi/viewcontent.cgi?article=4742&context=smallsat
6) Bobby Holden, Rachel Morgan, Gregory Allan, Paula do Vale Pereira, Warren Grunwald, Jennifer Gubner, Christian Haughwout, Abigail Stein, Yinzi Xin, Kerri Cahoy, Ewan Douglas, John Merk, Mark Egan, Gabor Furesz, ”Calibration and Testing of the Deformable Mirror Demonstration Mission (DeMi) CubeSat Payload,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-WKIV-03, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4370&context=smallsat
7) "Planet Releases OpenLST, An Open Radio Solution," Planet, 6 August 2018, URL: https://www.planet.com/pulse/planet-openlst-radio-solution-for-cubesats/
8) David Krejci, Fernando Mier-Hicks, Crey Fucetola, Paulo Lozano, ”High efficiency ionic liquid electrospray propulsion for Nanosatellites,” Proceedings of the 67th International Astronautical Congress(IAC), Guadalajara, Mexico, 26-30 September 2016, paper: IAC-16-C4.6.6x32963, URL: https://www.researchgate.net/publication/
309154098_High_efficiency_ionic_liquid_electrospray_propulsion_for_Nanosatellites
9) Dzmitry H. Zaitsau, Gennady J. Kabo, Aliaksei A. Strechan, Yauheni U. Paulechka, Anna Tschersich, Sergey P. Verevkin, and Andreas Heintz, ”Experimental Vapor Pressures of 1-Alkyl-3-methylimidazolium Bis(trifluoromethylsulfonyl)imides and a Correlation Scheme for Estimation of Vaporization Enthalpies of Ionic Liquids,” The Journal of Physical Chemistry A, Vol. 110, No 22, pp: 7303-7306, Published: 11 May, 2006, https://doi.org/10.1021/jp060896f
10) ”Scalable Electric Propulsion for a new era of satellite platforms,” Accsion Systems, 2019, URL: https://www.accion-systems.com/tile
11) Jeff Foust, ”Falcon 9 launches cargo Dragon mission to ISS,” SpaceNews, 03 June 2021, URL: https://spacenews.com/falcon-9-launches-cargo-dragon-mission-to-iss/
12) Glen Gawarkiewicz & Albert J. Plueddemann, ”Scientific rationale and conceptual design of a process-oriented shelfbreak observatory: the OOI Pioneer Array,” Journal of Operational Oceanography, Volume 13, pp: 19-36, Published online: 23 October 2019, https://doi.org/10.1080/1755876X.2019.1679609, URL: https://www.tandfonline.com/doi/pdf/10.1080/1755876X.2019.1679609?needAccess=true
13) FLIR (Forward Looking Infrared) camera, Boson, URL: https://www.flir.com/products/boson/
14) NOAA National Centers for Environmental Information, State of the Climate: Global Climate Report for Annual 2017, published online January 2018, URL: https://www.ncdc.noaa.gov/sotc/global/201713
15) Matthew J. Menne, Claude N. Williams, Byron E. Gleason, J. Jared Rennie, Jay H. Lawrimore, ”The Global Historical Climatology Network Monthly Temperature Dataset, Version 4,” Journal of Climate, Volume 31, Issue 24, 15 December 2018, https://doi.org/10.1175/JCLI-D-18-0094.1
16) ”Scanning Fabry–Pérot interferometers,” ThorLabs, 2020, URL: https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=859
17) https://www.matrix-vision.com/home-de.html
18) Paul Serra, Ondrej Cierny, Rodrigo Diez, Peter Grenfell, Grant Gunnison, Will Kammerer, Joe KustersCadence Payne, Joseph Murphy, Tao Sevigny, Paula do Vale Pereira, Laura YencheskyKerri Cahoy, Myles Clark, Tyler Ritz, Danielle Coogan, John Conklin, David Mayer, John Hanson, Jan Stupl, ”Optical Communications Crosslink Payload Prototype Development for CubeSat Laser Infrared CrosslinK (CLICK) Mission,” Proceedings of the 33rd Annual AIAA/USU Conference on Small Satellites, August 3-8, 2019, Logan, UT, USA, paper: SSC19-VI-04, URL: https://digitalcommons.usu.edu
/cgi/viewcontent.cgi?article=4408&context=smallsat
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).