CanX-2 (Canadian Advanced Nanosatellite eXperiment-2)
EO
Operational (nominal)
UTIAS / SFL
The second Canadian Advanced Nanospace eXperiment (CanX-2) is a nanosatellite mission designed and built at the Space Flight Laboratory (SFL) of the University of Toronto, Institute for Aerospace Studies (UTIAS) within the framework of the Canadian CubeSat program. Launched in 2008, the mission has two objectives: technology demonstration and provision of cost-effective access to space for the Canadian research and development community.
Quick facts
Overview
| Mission type | EO |
| Agency | UTIAS / SFL |
| Mission status | Operational (nominal) |
| Launch date | 28 Apr 2008 |
| CEOS EO Handbook | See CanX-2 (Canadian Advanced Nanosatellite eXperiment-2) summary |
Summary
Mission Capabilities
CanX-2 is equipped with an imaging system and four scientific payloads: the Argus 1000 Spectrometer, GOE (GPS Occultation Experiment), ASME (Advanced Surface Material degradation Experiment) and the satellite communication protocol experiment.
The imaging system consists of a colour imager and a monochromatic CMOS (Complementary Metal Oxide Semiconductor) imager, each with its own lens system. The latter is able to perform star-tracking experiments, while the former is mainly used for taking snapshots of targets of interest, such as the Earth or Moon.
Argus is a miniature technology demonstration instrument, aiming to detect the greenhouse gas constituents in the near-infrared spectrum using earthshine spectra.
GOE is a science experiment which performs refractive radio occultation measurements of the Earth's atmosphere and monitors the auroral activity.
ASME is a material science demonstration experiment which measures the surface degradation of a material sample exposed to the space environment by employing a photon detector. Its objective is to monitor the changes in the sample thickness as a result of oxygen erosion in order to evaluate the performance of the special surface treatment.
The satellite communication protocol experiment allows satellites to dynamically transfer data. That is, the network protocol on a given satellite activates in response to incoming data, and in turn relays information to other satellites or ground stations as they come into view.
Performance Specifications
The imagers utilise a lens with a 30° wide field-of-view (FOV) and a detector of size 1280 x 1024 pixels.
As a single aperture spectrometer with 12 mm x 12 mm plane gratings, Argus operates in the infrared range 900 - 1700 nm, at approximately 6 nm spectral resolution. The spectral range can be further extended to 2500 nm thanks to the enhanced InGaAs detectors. The spectrometer has a 0.1° viewing angle around its centred camera boresight and can operate either in a continuous cycle or a single shot mode, with an integration time between 100 microseconds and 8 seconds.
CanX-2 maintains a sun-synchronous orbit at an altitude of 635 km and an inclination of 97.4°.
Space and Hardware Components
CanX-2 is a 10 cm x 10 cm x 34 cm nanosatellite with a mass of about 3.5 kg. Its energy is provided by 22 surface-mounted solar cells with an average power of 4 W and then stored in Lithium-ion batteries with a capacity of 4.8 Ah. The spacecraft makes use of an unregulated satellite power bus operating nominally at 4.0 V.
The NanoPS (Nanosatellite Propulsion System) experiment consists of a liquid-fueled cold-gas thruster system, with the nozzle oriented such that thrusting induces a major-axis spin. NanoPS on CanX-2 is regarded as a precursor test instrument for the future formation flight missions of CanX-4 and -5.
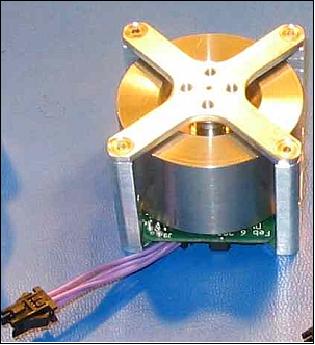
The ADCS (Attitude Determination and Control Subsystem) utilises three magnetorquer coils, the attitude being sensed with a suite of Sun sensors and a 3-axis magnetometer. It is a 30 mNms wheel based on a custom (scalable) motor design. The wheel uses a vacuum grease and does not require a pressurised enclosure.
As the highest-level software state on CanX-2, CANOE (Canadian Advanced Nanospace Operating Environment) is a multithreaded operating system which runs all the application software and handles all internal communications.
After one successful year in orbit, the mission had already met or exceeded all of its objectives, subsequently continuing to demonstrate the cost-effective capabilities of this class of spacecraft to execute hundreds of scientific experiments.
CanX-2 (Canadian Advanced Nanosatellite eXperiment-2)
Spacecraft Launch Mission Status Sensor Complement References
CanX-2 is a nanosatellite mission of UTIAS/SFL (University of Toronto, Institute for Aerospace Studies/Space Flight Laboratory) within the framework of the Canadian CubeSat program. A unique spacecraft program was created in Canada where students develop valuable skills through hands-on training. 1) 2) 3) 4) 5)
The mission objective of the CanX-2 spacecraft, a triple-cube configuration, is twofold:
- The main goal is to demonstrate several technologies critical for the upcoming CanX-4/5 formation flying mission planned for 2009 (CanX-2 serves as a risk mitigation mission). These technologies include a custom cold-gas propulsion system, a 30 mNms nanosatellite reaction wheel as part of a three-axis stabilized momentum-bias attitude control system, and a commercially available GPS receiver.
- The secondary objective of CanX-2 is to provide rapid and cost-effective access to space for the Canadian research and development community (this includes several university experiments and an atmospheric spectrometer).
CanX-2 includes experiments in GPS technologies (atmospheric occultation experiments), a miniature atmospheric spectrometer to detect greenhouse gases, advanced materials, and space communication protocols. In addition to the science payloads, CanX-2 will also fly engineering payloads such as a momentum-bias attitude control subsystem, an experimental S-band communications system, a custom onboard computer, and a miniature propulsion system. The CanX-2 program at UTIAS/SFL is supported/sponsored by a number of Canadian government institutions, industry, and universities as partners.
Spacecraft
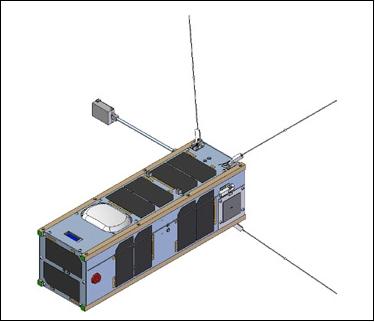
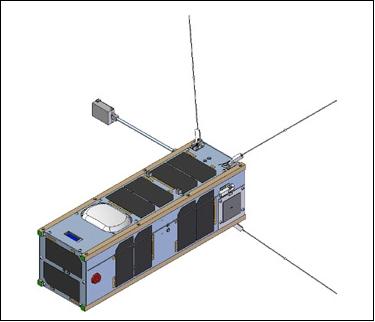
The spacecraft structure of CanX-2 is triple in size of CanX-1, measuring 10 cm x 10 cm x 34 cm with a mass of about 3.5 kg (triple-cube standard). This CubeSat design option permits the triple volume available for payloads and a larger surface area for more power generation. The S/C bus employs an Al 6061-T6 tray-based design to simplify assembly and integration. Most subsystems are directly mounted to a tray, as are most of the body panels that enclose them. Externally, four aluminum rails act as contact surfaces with the CubeSat deployer, the XPOD (X-Picosatellite Orbital Deployer) a custom, independent separation system that was designed and built at UTIAS/SFL.
Power is provided by 22 surface-mounted triple-junction GaAs solar cells with 4 W of average power (2-7 W depending on S/C orientation and orbit). Electrical energy is stored in Li-ion batteries with a capacity of 4.8 Ah. Use of an unregulated satellite power bus operating nominally at 4.0 V.
The ADCS (Attitude Determination and Control Subsystem) utilizes three magnetorquer coils (max. magnetic dipole of 0.13 A m2). In addition, a reaction wheel is used, developed by UTIAS/SFL in cooperation with Sinclair Interplanetary. It is a 30 mNms wheel based on a custom (scalable) motor design. The wheel uses a vacuum grease and does not require a pressurized enclosure. Attitude is sensed with a suite of sun sensors and a 3-axis magnetometer (the magnetometer is deployed on a boom). The goal is to achieve both attitude determination and pointing with an accuracy of ±10º and to maintain a pointing stability of ±1º.
CanX-2 features an OBC, developed at UTIAS/SFL, that utilizes 32-bit ARM-7 based processors (redundant units on two boards) with 6 MB of SRAM memory and EDAC (Error Detection and Correction) software for single-event upsets that occur in LEO. Each processor has 16 MB of flash memory for data storage.
Using the on-board peripherals and an off-chip quad-UART, the main OBC interfaces with all the subsystems on CanX-2. It is responsible for all normal satellite operations, including a) periodic telemetry collection for the whole orbit data log, b) execution of the attitude determination and control algorithms, c) commanding of experiment payloads and d) communication with the ground.
The payload OBC employs a different design to the main OBC and is being flown to obtain heritage with a different set of components. It can also be used to record and store data from GPS experiments.
An SFL-developed operating system, CANOE (Canadian Advanced Nanospace Operating Environment), runs all the application software and handles all internal communications. CANOE is a multithreaded operating system and is the highest-level software state on CanX-2. This operating system allows multi-tasking of operations and full spacecraft-functionality. One of the primary tasks of CANOE is running the OASYS (On-orbit Attitude System Software). OASYS is responsible for calculating the attitude state vector based on attitude sensor inputs and commanding actuators to attain a desired attitude state. 6)
RF communications: CanX-2 employs a full-duplex dual-band communication system using SFL-designed radio systems. CanX-2 takes a three-pronged approach.
1) A custom full duplex amateur radio system is used in UHF. The uplink has a data rate of 4 kbit/ss GMSK receiver connected to a circularly polarized quad-canted monopole antenna system. The downlink includes an improved power amplifier providing a transmitter power of 30 dBm (1 W). The downlink data rate is 4 kbit/s using a GFSK (Gaussian Frequency Shift Keying) modulation scheme. A quad-canted turnstile antenna provides a near omnidirectional coverage required during the commissioning phase.

2) In addition, a VHF beacon is used able of transmitting identification and several telemetry parameters (the beacon broadcasts basic telemetry to Earth via Morse code at a rate of 15 words/minute).
3) S-band transmitter, developed by SFL. The objective is to evaluate the performance of the miniaturized technology scheme for nanosatellites. The transmitter has a maximum power output of 27 dBm (0.5 W), designed for high-speed data transmissions. The data rate and modulation scheme can be adjusted dynamically as the link conditions vary in orbit (32 kbit/s to 1 Mbit/s in downlink and 4 kbit/s in uplink). By selecting interchangeable components during assembly, the S-band transmitter can operate either in the Amateur Satellite UHF-band or in the Space Research S-band frequency allocations. - If the S-band transmitter functions nominally, the baseline communications for CanX-2 will be configured such as to use UHF in uplink and the S-band in downlink. This permits full duplex communications and increases the data rate by an order of magnitude.
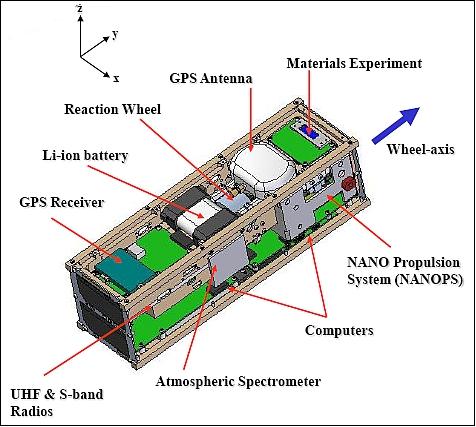
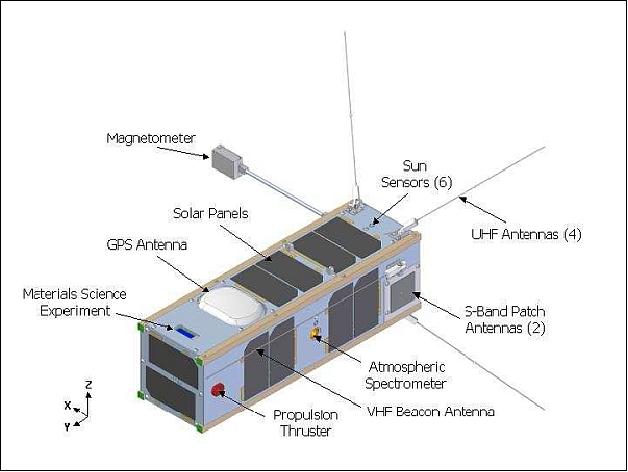
Figure 6: Accommodation of subsystems in the CanX-2 bus (image credit: UTIAS/SFL)
Launch
Launch: A launch of CanX-2 as a secondary payload took place on April 28, 2008 on a PSLV launch vehicle of ISRO from SDSC (Satish Dhawan Space Centre), Sriharikota, India. - The primary payload on this flight was CartoSat-2A, a high-resolution panchromatic imaging satellite of the military of India, developed by ISRO (based on CartoSat-2). In addition, ISRO launched its own microsatellite, IMS-1 (Indian Microsatellite-1), of 83 kg.
Furthermore, the shared launch included eight secondary payloads with the following CubeSats or nanosatellites:
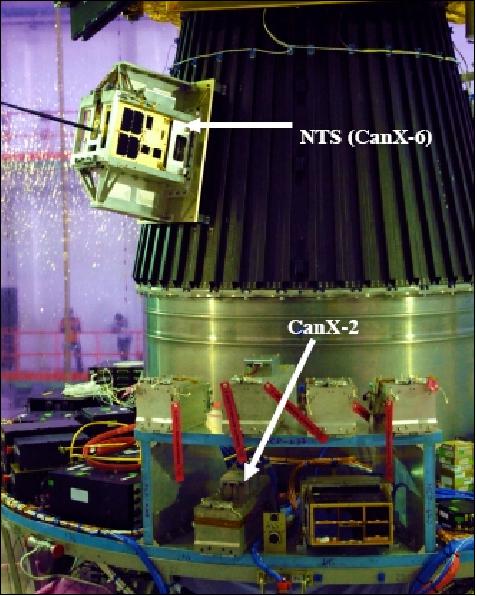
CanX-2 of UTIAS/SFL; AAUSat-2 of Aalborg University, Denmark; COMPASS-1, University of Applied Science, Aachen, Germany; Delfi-C3 of the Technical University of Delft, The Netherlands; SEEDS-2 of Nihon University, Japan; CUTE-1.7+APD-2 of of the Tokyo Institute of Technology (TITech), Japan; NTS (Nanosatellite Tracking of Ships) of COM DEV / UTIAS/SFL, Toronto, Canada; and Rubin-8-AIS (7 kg) an experimental space technology mission of OHB-System, Bremen, Germany.
The launch of the 8 nanosatellite payloads was executed under a commercial contract between the University of Toronto, COSMOS International (a company of the OHB Fuchs Gruppe, Bremen, Germany), and the Antrix Corporation of Bangalore, India (the latter is the commercial arm of ISRO).
Six custom-built XPOD (eXperimental Push Out Deployer) units were provided by UTIAS/SFL to deploy all smallsats - except the CUTE-1.7+APD-2 (3.5 kg) double cube of TITech which used its own TSD deployer system.
The XPOD deployment system is a jack-in-the-box type concept where, once a deployment door is opened, the satellite is pushed out of an aluminum or magnesium box-frame by a spring-loaded plate. The XPOD deployment door is secured in place during launch by a cord. This securing cord is burned and cut using a heater when a deployment signal is issued by the launch vehicle. Each XPOD is equipped with sensors which confirm spacecraft deployment.
Orbit: Sun-synchronous orbit, altitude = 635 km, inclination= 97.4º, the local equatorial crossing on the descending node (LTDN) is at 9:30 hours.
Mission Status
• CanX-2 and its payload are operating nominally in January 2017 in its 9th year on orbit. With its mass of 3.5 kg, CanX-2 was one of the first CubeSats at the time of launch in 2008 to demonstrate three-axis attitude stabilization, propulsion, and a high speed S-band downlink with a 1 Mbit/s data rate (Ref. 8).
• CanX-2 and its payload are operating nominally in 2015. 8)
• CanX-2 and its payload are operating nominally in 2013 (Ref. 10).
• The spacecraft and its payload are operating nominally in 2012 (Ref. 10) after 4 years on orbit.
The University of Calgary's interest in CanX-2 is vested entirely in its GPS payload, a geodetic grade COTS receiver, which has been used in experiments involving single-point GPS position estimation, precise orbit determination, and GPS radio occultation. Electron density profiles are obtained from a nanosatellite utilizing commercial-off-the-shelf GPS hardware and single frequency techniques. 9)
• CanX-2 and its payload are operating nominally in 2011. The project continues to collect data from the science experiment. In addition, engineering data are being collected (such as additional thruster performance). 10)
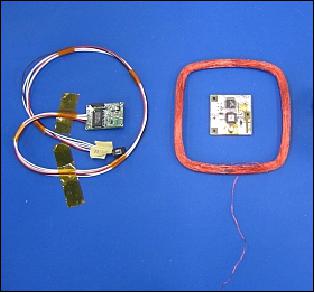
GPS tracking on a nanosatellite: A NovAtel OEM4-G2L receiver is employed on CanX-2, which offers geodetic grade measurements at favorably low power. While various other CubeSats have carried GPS receivers into space before, CanX-2 is apparently the first mission to successfully deliver GPS navigation fixes and raw measurements thanks to proper attitude control and onboard data handling systems. Even though the achieved signal quality falls below expectations due to limitations of the employed antenna system, the receiver provides both L1 C/A tracking and semicodeless L2 P(Y) tracking on a regular basis. 11)
• The spacecraft and its payload are operating nominally in 2010. - Many achievements, some nanosatellite records and other SFL firsts, have all been accomplished by CanX-2 during its first two years in orbit. Notable achievements include: 12) 13) 14)
- Rapid commissioning of the spacecraft hardware and software, allowing mission critical payload operation mere days from launch.
- Characterization of the NANOPS propulsion system on orbit, with experimentation results being similar to model-generated estimates and undegraded functionality after 1.5+ years in orbit.
- Accurate attitude estimation and pointing demonstrated, including solid performance of all SFL developed attitude sensors and the SFL/Sinclair interplanetary miniature wheel.
- Unprecedented radio performance for an operational nanosatellite.
- Successful operation of the power, thermal and structural subsystems. Verification of the accuracy of the power and thermal models.
- Hundreds of scientific experiments were executed on orbit, leading to successful spectrometer spectra of greenhouse gas concentrations and valid GPS signal occultation observations.
• In the summer of 2009, after one successful year in orbit, the nanosatellite has met or exceeded all mission objectives and continues to demonstrate the cost-effective capabilities of this class of spacecraft. Key achievements to date include a characterization of the propulsion system, a full demonstration of the attitude determination and control subsystem including capabilities in accurate payload pointing (including nadir-tracking) and orbit-normal alignment, long-duration reaction wheel operation, unprecedented radio performance for an operational nanosatellite, and successful science operations. 15)
- Over the last year, the CanX-2 bus has proven to be a solid platform in conducting the engineering and science mission objectives. Problems encountered (typically software or procedural) during the commissioning phase were ironed out. Upon successful completion of spacecraft commissioning, the ground-support team had been making steady progress towards meeting the spacecraft mission goals.
- The UHF and S-band communication system on the spacecraft have been operating well. The radios have been tested through a wide range of functionality, with S-band communication data rates ranging from 32 kbit/s and 256 kbit/s (a data rate of 1000 kbit/s is possible with this transmitter design) under both BPSK and QPSK modulation schemes. Note, that a downlink rate of 256 kbit/s is a new record for this class of spacecraft. As of June 2009, over 370 MB of science data and engineering telemetry have been downloaded to date. The UHF transmitter, designated as the backup downlink radio, has not been required to date.
- After a year on orbit, the performance of the attitude software [OASYS, which includes the EKF (Extended Kalman Filter)] has been solid. Three flight upgrades have been made, all during the first few months into the mission. The first upgrade modified the way the operating system (CANOE) turns the torquers off while reading from the magnetometer. The second upgrade added some logic to the processing algorithms of the fine sun sensors to improve performance. The third upgrade added the ability to use the torquers to apply counter dipoles, in an attempt to combat a parasitic dipole. The upcoming 4th upload will add more sun sensor logic, specifically enabling more than one digital sensor to be read per one second processing cycle, which will improve the EKF's performance in certain cases. - It is currently estimated that the attitude determination solution is good to around 1.5º in sunlight; performance in eclipse is not within the mission scope. This performance estimate is derived through comparison of flight telemetry to modeled performance.
- A significant fraction of CanX-2's time has been spent conducting engineering and science payload experimentation. NANOPS, being the highest priority payload, was characterized through experimentation as early as possible (a few days after launch). Full-time science (GPS occultation observations and spectrometer observations) observations began in November 2008.
- Argus spectrometer experimentation: With the experiment setup and commissioning completed by the end of 2008, twelve nadir-tracking observations were scheduled and executed between late-February and early-April, leading to successful collection of valid greenhouse gas spectra at targets of interest all over the world. 16)
- CanX-2 is a trail-blazing mission for UTIAS/SFL (Space Flight Laboratory). Technologies demonstrated on CanX-2 will be the cornerstones of the subsystems that form future SFL missions using its GNB (Generic Nanosatellite Bus). The GNB, while built upon the heritage and experience of CanX-2, is an even more capable spacecraft bus. - Upcoming GNB-based missions include the CanX-4/-5 dual-spacecraft formation flight demonstration, the CanX-3 (aka BRITE (BRIght Target Explorer) astronomy constellation and AISSat-1, a spacecraft that will detect ship-based AIS signals within Norwegian waters Ref. 15).
• In April 2009, CanX-2 is working well and nearing the completion of its first year in orbit. Over 80% of the objectives were accomplished in the first 3 months of the mission (demonstration of all technologies). The spacecraft is now in the second period of the mission, performing atmospheric science experiments. 17)
• The GOE (GPS Occultation Experiment) is working well, using a commercial GPS receiver to perform radio occultation experiments - measurements of delays in GPS signals through the atmosphere to infer atmospheric properties such as water vapor and total electron content. CanX-2 is likely the smallest satellite to perform such scientific investigation from Earth orbit. 18)
Occultation trials on CanX-2 commenced in January 2009, with the first campaign running until March 2009 and the second running from April to June 2009. The focus of these two occultation campaigns were to commission the experiment, and work out issues related to timing, GPS receiver clock drift and attitude pointing (commanding a particular GPS antenna attitude about the spacecraft minor axis in order to optimally point the GPS antenna and maximize the received L2 signal strength).
• Attitude demonstration operations in the third quarter of 2008 involved achievement of orbit-normal attitude alignment using a Y-Thomson configuration and accurately pointing mission payloads about the spacecraft wheel-(minor)-axis. After some initial difficulties (including having to compensate for spacecraft dipole, adjusting onboard algorithms and updating operations procedures), proper orbit-normal alignment was achieved by the end of October 2008 (Ref. 15).
• RSSI (Received Signal Strength Indicator) and spacecraft identification: One very interesting observation associated with the cluster launch of CanX-2 (and likely to be present in other cluster launches) was the effect that spacecraft in close proximity can have on each other, particularly when broadcasting beacons.
One of the telemetry points collected onboard both CanX-2 and NTS (Nanosatellite Tracking of Ships) is a parameter called the UHF RSSI. The RSSI provides a direct measure of the amount of RF energy received by the UHF radio while in orbit. In the first few days of commissioning, it was observed that the radio onboard CanX-2 was picking up much more ambient noise than the almost identical radio on NTS.
Further observations over the next several days showed that, although the CanX-2 RSSI was noisier than the NTS RSSI, the noise was decreasing steadily over time (see Figure 11). The data also showed that during a period of approximately 20 hours, starting on April 29th, the CanX-2 RSSI had become much quieter. This period of relative calm ended on April 30, 2008, at ~ 1200 UTC, when the cluster of spacecraft was over Japan.
It is very likely, that the noise observed on the CanX-2 radio was caused by the extreme proximity of the two satellites. Fortunately, the uplink margins in the CanX-2 UHF design were sufficient to overcome the added noise input (Ref. 15).
• The CANOE operating system was loaded upon completion of the commissioning activities in BL2. These commissioning tasks include verifying the stability of the BL2 (Bootloader-2) software and sequentially powering up each sun sensor and the magnetometer in order to verify that these sensors do not cause any shorts.
• Within the first three weeks after launch, significant headway has been made with respect to the orbital commissioning of the CanX-2 spacecraft. The commissioning procedure involved incrementally building on the spacecraft functionality by enabling progressively more capable software modes and testing systems, actuators and sensors as they are required.
• Upon ejection from the XPOD, CanX-2 powered up and booted up into the Bootloader-1 (BL1) software state. The BL1 software is stored on a pre-programmed EPROM and is the lowest-level software state.
• CanX-2 (as well as all spacecraft of the mission) were launched and deployed successfully. First contact with the UTIAS/SFL ground station was established on the second pass after deployment. The telemetry indicated that CanX-2 as well as CanX-6/NTS spacecraft were perfectly healthy following launch and ejection from the XPOD.
Sensor Complement
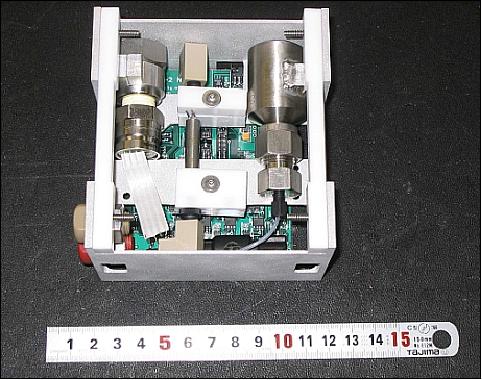
NanoPS (Nanosatellite Propulsion System)
The NanoPS experiment was developed at UTIAS/SEL. The objective is to demonstrate and evaluate its performance. The propulsion system consists of a liquid-fueled cold-gas thruster system [using sulfur hexafluoride (SF6, high storage density) as a propellant] with a total mass of < 0.5 kg. It features a thrust level of 50-100 mN with a specific impulse of 500-1000 m/s providing a total delta v of > 35 m/s. The nozzle is oriented such that thrusting induces a major-axis spin on CanX-2 (NanoPS involves mainly attitude control maneuvers that spin the satellite about one axis). NanoPS on CanX-2 is regarded a precursor instrument (scaled prototype) for the future formation flight missions of CanX-4 and CanX-5. 19)
CMOS/APS Imagers
A color imager and a monochrome imager are being used. The imagers are COTS CMOS imaging chips manufactured by National Semiconductor. Each imager has its own lens system. The imagers utilize a wide field-of-view (FOV) lens of 30º with a detector size of 1280 x 1024 pixels. The monochrome imager provides the option of doing star tracking experiments (assessment of the capability of CMOS imagers as nanoscale star trackers). CMOS imagers were chosen over CCD technology because of their power efficiency and performance. The color imager is mainly used to take snapshots of targets of interest (Earth, moon, etc.).
Argus 1000 Spectrometer
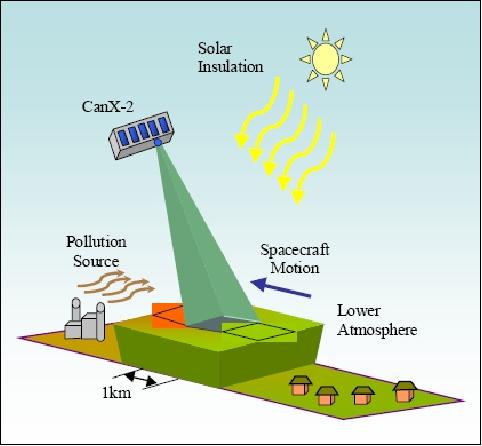
Argus is a miniature technology demonstration instrument designed at York University, Toronto, Canada (manufacturer: Thoth Technology Inc., Kettlby, Ontario). The objective is to detect greenhouse gas constituents in the near infrared region using Earthshine spectra. Argus features only an along-track footprint of 1 km x 1 km (there is no scan capability in cross-track). Initial tests will be carried out to detect pollution plumes of industrial origin. Once Argus has demonstrated and validated the detection of greenhouse gases, then 3-axis control of the spectrometer will be implemented on future missions (an application could be the support of the goals of the Kyoto protocol). 20) 21)
Atmospheric constituent | Observed absorption |
Carbon Dioxide (CO2) | 1.24 µm (10-21 mol cm-2) |
Water (H2O) | 0.90 µm (10-21 mol cm-2) |
Carbon Monoxide (CO) | 1.63 µm (10-22 mol cm-2) |
Methane (CH4) | 1.67 µm (10-20 mol cm-2) |
Hydrogen Fluoride (HF) | 1.265 µm (10-19 mol cm-2) |
Argus uses an adjacent spectral range 900-1700 nm to record nadir spectra of the radiation emitted from a 1 km footprint under the spacecraft's path, as shown in Figure 9. The gaseous composition of the air mass along the instrument's line of sight may be inferred through measurement of absorption features associated with a particular gas. Argus will observe carbon dioxide, methane, carbon monoxide, hydrogen fluoride and water-absorption bands in order to determine near-surface column amounts for pollution monitoring.
Argus is a micro-spectrometer observing in the spectral range of 900-1700 nm with a spectral resolution of about 6 nm. An InGaAs detector with diffractive optics is used. An IFOV of 1 mrad is used to provide a high resolution pollution-mapping capability for this prototype instrument. The device includes a programmable Peltier-effect cooler that enhances noise performance and that can be programmed to operate over a wide range of integration times from microseconds to seconds.
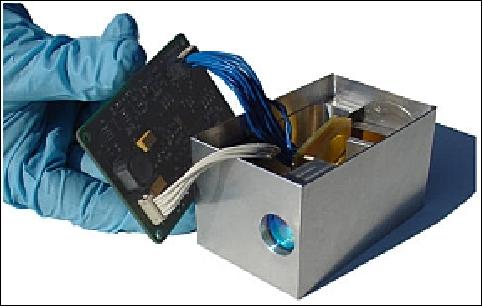
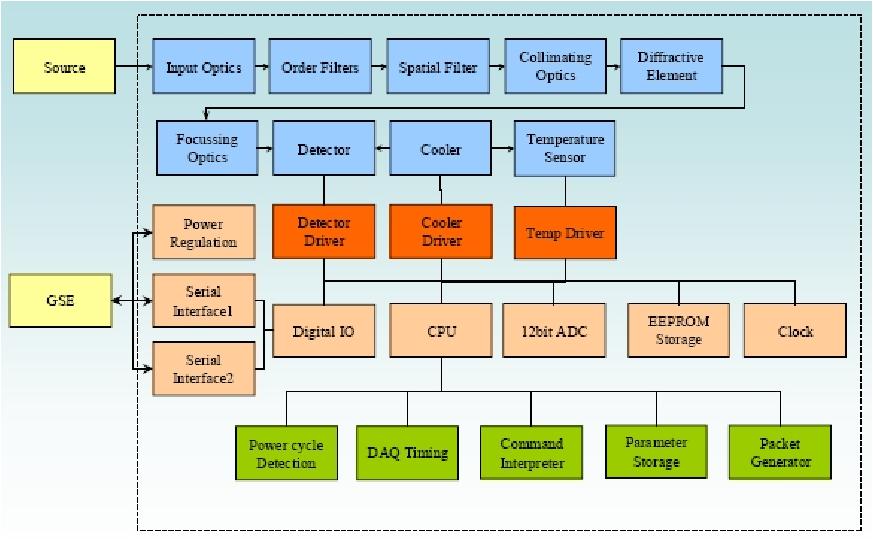
The instrument's functional design is shown in Figure 11. The instrument includes a micro controller that controls the device and acquires spectra. The command interface accepts commands via prime and redundant serial interfaces and delivers spectra and engineering data via the same interface. The instrument consumes < 1 W of power and includes internal power isolation and regulation. Fore optics discriminate infrared radiation; a grating element diffracts it spectrally, and the signal is then focused onto a linear InGaAs photodiode array with 256 high-quantum efficiency pixels.
With a low mass of 0.250 kg and dimensions of 50 mm x 60 mm x 80 mm, the micro-spectrometer has minimal accommodation requirements. Argus employs an infrared optical triplet lens in the fore optics to provide an image tile tightly focused on a beam stop that provides the spatial filtering for the device. An order filter prevents visible radiation (below 900 nm) from entering the spectrometer chamber. The device employs 35 mm optics to collimate radiation from a 1 km tile onto a diffraction grating and then focus it onto the detector array.
Instrument calibration: Argus is calibrated in a three-step process. First, a wavelength calibration is conducted using infrared lasers at 1064 nm and 1532 nm. An infrared laser source is passed through a collimator optics that fills the instrument field-of-view. This simulates radiation emitted by a ground tile and received by the spectrometer. The spectrometer is mounted on an adjustable vernier kinematic mount with five degrees of freedom.
Parameter | Specification |
Instrument type | Grating spectrometer |
Spectral range | 0.9-1.7 µm infrared range at approximately 6nm spectral resolution (enhanced detectors extend range to 2.5 µm) |
Configuration | Single aperture spectrometer |
FOV (Field of View) | 0.1º viewing angle around centered camera boresight with 15 mm foreoptics |
Instrument size | 40 mm x 45 mm x 80 mm (base x height x length) |
Instrument mass | 0.230 kg |
Detectors | 256 element InGaAs diode arrays with programmable peltier cooler for enhanced noise performance |
Gratings | 12 mm x 12 mm plane gratings, 200 to 600 g/mm |
Electronics | 8 bit microprocessor with 12 bit ADC, 3.6-4.2 V, input rail 250-1000 mA |
Operational modes | - Continuous cycle, constant integration time |
Data delivery | Fixed length parity striped packets of single or co-added spectra with |
Integration time | 100 µs to 8 s |
Calibration | Two-wavelength laser calibration and radiance calibration prior to flight |
Volatiles | Less than 0.1% volatile internals by mass |
GOE (GPS Occultation Experiment)
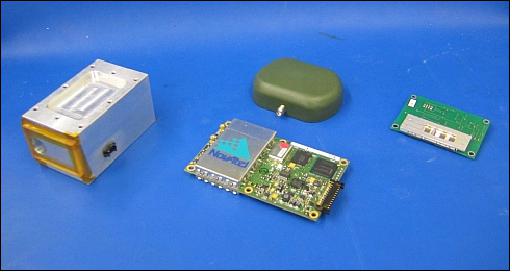
GOE was designed by the Department of Geomatics Engineering at the University of Calgary. The objective of this science experiment is to perform refractive radio occultation measurements of Earth's atmosphere (vertical profiles of refractivity in the troposphere). GOE consists of a dual-frequency receiver and a directional antenna mounted on the outer surface of the satellite. - Data from ground-based GPS stations are being used in conjunction with the spaceborne data, and differential GPS processing methods are employed, to recover the atmospheric properties such as TEC (Total Electron Content) of the ionosphere and tropospheric water vapor as a function of altitude. GOE will also permit the monitoring of auroral activity.
ASME (Advanced Surface Material degradation Experiment)
ASME is a material science demonstration developed at the University of Toronto. This experiment uses a photon detector to measure the surface degradation of a material sample exposed to the space environment. The sample is divided into two identical units: one having been given a special surface treatment and another one without surface treatment. The objective is to monitor the changes in sample thickness as a result of atomic oxygen erosion to evaluate the effectiveness of the special surface treatment (the electrical resistance is measured over time for a deduction in sample volume changes).
Satellite Communication Protocol Experiment
The communication experiment was developed at Carleton University, Canada. The aim is to allow satellites to dynamically transfer data. That is, the network protocol on a given satellite activates in response to incoming data: it in turn relays information to other satellites or ground stations as they come into view.
This CanX-2 experiment will use the networking protocol under the open-source operating system eCOS and evaluate it in a LEO environment. During the experiment, XSTP (eXtended Satellite Transport Protocol) will be used instead of NSP (Node Switch Protocol) that is generally used for all monitoring functions.- The protocols include a network layer and a transport layer. The network layer protocol comprises an algorithm using dynamic source routing. The system remains silent by default and reacts dynamically when it perceives traffic. In a self-organizing network approach, a satellite can automatically make use of ground stations or other satellites - when available to reach a given target. The transport layer protocol is called XSTP; it addresses data transport errors that occur in particular in LEO satellite links. The CanX-2 experiment will interact with available ground stations for demonstration purposes. 22)
References
1) K. Sarda, S. Eagleson, E. Caillibot, C. Grant, D. Kekez, F. Pranajaya, R. E. Zee, "Canadian Advanced Nanospace Experiment 2: Scientific and Technological Innovation on a Three Kilogram Satellite," Proceedings of the 56th IAC 2005, Fukuoda, Japan, Oct. 17-21, 2005, IAC-05-B5.6.A.15, URL: [web source no longer available]
2) D. Rankin, D. D. Kekez, R. E. Zee, F. M. Pranajaya, D. G. Foisy, A. M. Beattie, "The CanX-2 Nanosatellite: Expanding the Science Abilities of Nanosatellites," Proceedings of IAC 2004, Vancouver, Canada, Oct. 4-8, 2004, IAC-04-IAA.4.11.6.04
3) https://web.archive.org/web/20040309085922/http://www.utias-sfl.net/nanosatellites/CanX2/CanX2Index.html
4) K. A. Carroll, S. Rucinski, R. E. Zee, "Arc-Minute Nanosatellite Attitude Control: Enabling Technology for the BRITE Stellar Photometry Mission," Proceedings of AIAA/USU Conference on Small Satellites, Logan UT, Aug. 9-12,2004, SSC04-V-2
5) Karan Sarda, Cordell Grant, Robert Zee, Daniel Kekez, Stuart Eagleson, "Canadian Advanced Nanospace Experiment 2: On-Orbit Experiences with a Three-Kilogram Satellite," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, SSC08-II-5
6) S. Eagleson, K. Sarda, S. Mauthe, T. Tuli, R. E. Zee, "Adaptable, Multi-Mission Design of CanX Nanosatellites," Proceedings of the 20th Annual AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 14-17, 2006, paper: SSC06-VII-3, URL: https://web.archive.org/web/20110221105324/http://www.utias-sfl.net:80/docs/gnb-ssc-2006.pdf
7) Daniel D. Kekez, Robert E. Zee, Freddy M. Pranajaya, "Launches and On-Orbit Performance - An Update on Nanosatellite Missions at the UTIAS Space Flight Laboratory," CalPoly Summer Workshop, Aug. 7, 2010, URL: http://mstl.atl.calpoly.edu/~workshop/archive/2010/Summer/05%20-%20Kekez%20-%20UTIAS%20SFL.pdf
8) Information provided by Robert E. Zee of UTIAS/SFL.
9) M. Swab, K. O'Keefe, S. Skone, "Single-frequency ionospheric profiles from the CanX-2 nanosatellite," ION GNSS 2012 Conference, Nashville, Tennessee, Sept. 16-20, 2012, URL of abstract: http://www.ion.org/meetings/abstract.cfm?meetingID=38&pid=323&t=A&s=4
10) Information provided by Freddy M. Pranajaya of UTIAS/SFL, Toronto, Canada
11) E. Kahr, O. Montenbruck, K. O'Keefe, S. Skone, J. Urbanek, L. Bradbury, P. Fenton, "GPS tracking on a nanosatellite -the CanX-2 flight experience," Proceedings of the GNC 2011, 8th International ESA Conference on Guidance, Navigation & Control Systems, Carlsbad (Karlovy Vary), Czech Republic, June 5-10, 2011
12) Karan Sarda, Cordell Grant, Stuart Eagleson, Daniel D. Kekez, Robert E. Zee, "Canadian Advanced Nanospace Experiment 2 Orbit Operations: Two Years of Pushing the Nanosatellite Performance Envelope," Proceedings of the Symposium on Small Satellite Systems and Services (4S), Funchal, Madeira, Portugal, May 31-June 4, 2010
13) Karan Sarda, Cordell Grant, Stuart Eagleson, Daniel D. Kekez, Robert E. Zee, "Canadian Advanced Nanospace Experiment 2 Orbit Operations: Two Years of Pushing the Nanosatellite Performance Envelope," Proceedings of ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institue) Conference, Toronto, Canada, May 4-6, 2010, URL: https://utias-sfl.net/wp-content/uploads/IAC2010-S4-2-Canadian-advanced-nanospace-K-Sarda.pdf
14) Amee Shah, Karan Sarda, Cordell Grant, Stuart Eagleson, Daniel Kekez, Robert E. Zee, "Canadian Advanced Nanospace Experiment 2 Orbit Operations: One Year of Pushing the Nanosatellite Performance Envelope," Proceedings of the 60th IAC (International Astronautical Congress), Daejeon, Korea, Oct. 12-16, 2009, IAC-09.B4.3.3
15) Karan Sarda, Cordell Grant, Stuart Eagleson, Daniel Kekez, Amee Shah, Robert Zee, "Canadian Advanced Nanospace Experiment 2 Orbit Operations: One Year of Pushing the Nanosatellite Performance Envelope," Proceedings of the 23nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 10-13, 2009, SSC09-IV-6
16) https://web.archive.org/web/20040316083601/http://www.thoth.ca/argus.htm
17) Freddy M. Pranajaya, "Nanosatellite Technologies and Services At the Space Flight Laboratory," 2009 CubeSat Developers' Workshop, San Luis Obispo, CA, USA, April 22-25, 2009
18) "Big Science From Canada's Smallest Satellite," Space Daily, March 9, 2009, URL: http://www.spacedaily.com/reports/Big_Science_From_Canada_Smallest_Satellite_999.html
19) S. Mauthe, F. M. Pranajaya, R. E. Zee, "The Design and Test of a Compact Propulsion System for CanX Nanosatellite Formation Flying,"Proceedings of the 19th Annual AIAA/USU Conference on Small Satellites, Logan, Utah, August, 8-11, 2005, SSC05-VI-5
20) B. M. Quine, R. Jagpal, A. Ho, "Argus -a Canadian Pollution Monitor: Instrument Overview," Proceedings of the 13th Canadian Astronautics Conference, ASTRO 2006, Montreal, QC, Canada, organized by CASI (Canadian Astronautics and Space Institute), April 25-27, 2006
21) https://web.archive.org/web/20060430053917/http://www.thoth.ca/spectrometers.htm
22) M. E. Elaasar, Z. Li, M. Barbeau, E. Kranakis, "The eXtended Satellite Transport Protocol: Its Design and Evaluation," Proceedings of AIAA/USU Conference on Small Satellites, Logan, UT, Aug. 11-14, 2003
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement References Back to top