Deimos-1/GEOSAT-1
EO
Atmosphere
Radiation budget
Imaging multi-spectral radiometers (vis/IR)
Deimos-1 (now GEOSAT-1) is a microsatellite as a part of the Disaster Monitoring Constellation (DMC), owned and operated by the Spanish company GEOSAT (formerly owned by Deimos Imaging). The satellite was launched in July 2009 and joined 3 other existing satellites in the second generation of DMC satellites (DMC-2G), providing commercial imaging to support rapid-response, large-area mapping for a range of applications.
Quick facts
Overview
| Mission type | EO |
| Agency | DMI, GEOSAT |
| Mission status | Operational (nominal) |
| Launch date | 29 Jul 2009 |
| Measurement domain | Atmosphere, Land |
| Measurement category | Radiation budget, Multi-purpose imagery (land), Vegetation, Albedo and reflectance |
| Measurement detailed | Land surface imagery, Vegetation type, Earth surface albedo, Short-wave Earth surface bi-directional reflectance, Leaf Area Index (LAI), Vegetation Cover, Land cover, Normalized Differential Vegetation Index (NDVI) |
| Instruments | MS, SLIM-6-22 |
| Instrument type | Imaging multi-spectral radiometers (vis/IR) |
| CEOS EO Handbook | See Deimos-1/GEOSAT-1 summary |
Related Resources
Summary
Mission Capabilities
Deimos-1 carries the Surrey Linear Imager Multispectral 6 Channels(SLIM6) pushbroom imaging radiometer, consisting of a three-band multispectral scanning camera capable of providing mid-resolution imagery. The instrument images green, red and NIR (Near Infrared) spectral bands. SLIM6 operates in store-and-forward mode, so that images can be taken out of range of any control stations.
The instrument design has been improved since the first generation onboard the DMC-1G (DMC first generation) in order to support data quality, radiometry and calibration.
Performance Specifications
SLIM6 has a spatial resolution of 22 m at nadir and data calibration accuracy within 5 percent. The satellite was in a sun-synchronous near-circular orbit at an altitude of approximately 661 km, inclined at 98° with an orbital period of 97.7 minutes. Deimos-1 was launched alongside UK-DMC-2 (United Kingdom - Disaster Monitoring Constellation - 2), operating together with Deimos-1 and placed in a similar orbit.
Space and Hardware Components
The DMC-2G satellites are built on the SSTL-100 (Surrey Satellite Technology Ltd. - 100) bus, consisting of aluminium-alloy and honeycomb panels designed to be compatible with a range of launch platforms. The AODCS (Attitude and Orbit Determination and Control Subsystem) provides 3-axis attitude control with dual-axis sun sensors, magnetorquers and reaction wheels.
RF communications are transmitted in S-band frequency for TT&C (Telemetry, Tracking & Command) transmissions and in X-band for transmission of payload imagery.
Deimos-1/GEOSAT-1 Microsatellite Mission
Overview Spacecraft Launch Mission Status Sensor Complement References
In the timeframe 2005/6, SSTL (Surrey Satellite Technology Ltd.) started planning for second generation missions (with improved imaging capabilities) to be added to the current first generation DMC (Disaster Monitoring Constellation), coordinated by DMCii (DMC International Imaging Ltd.). The basic enhancement of the second generation missions, also referred to as DMC-NG (Next Generation), is to provide wide-swath multispectral imagery at higher resolutions (660 km swath with 22 m pixel size at nadir). The DMC satellites are built on a platform developed by SSTL under the BNSC MOSAIC (Micro Satellite Applications in Collaboration) program. 1) 2) 3) 4) 5) 6)
The DMC-2G (DMC -Second Generation) satellites not only provide data continuity, but also a greatly enhanced imaging capability to cover large areas of territory at enhanced resolution. The objective is to offer the timely imagery (broadcast service) to a global community of customers with the capability of a direct downlink to a customer ground station. The combination of multiple spacecraft in constellation provides for daily coverage at a resolution that enables effective monitoring of the rapidly changing environment.
The following DMC second generation missions are in orbit:
• Deimos-1, launch July 29, 2009
• UK-DMC-2, launch July 29, 2009
• NigeriaSat-2 (launch August 17, 2011, the mission is described under a separate entry on the eoPortal)
• NigeriaSat-X (launch August 17, 2011, the mission is described under a separate entry on the eoPortal)
Some background of the DMC constellation
• Actually, SSTL considers already the Beijing-1 spacecraft (launched Oct. 27. 2005) of the DMC "first-generation missions" as its first second-generation DMC satellite - due to the fact that the satellite was using already an enhanced type platform (SSTL-150) of TopSat heritage. The X-band downlink capacity and the onboard data storage capability of Beijing-1 was considerably improved permitting observation scenes of 4100 km in along-track (the other first-generation DMC satellites were limited to 250 km scenes in along-track, and they were using S-band communications). In addition, the spacecraft was flown with a second imager, namely CMT (China Mapping Telescope) a high-resolution panchromatic pushbroom imager (4 m GSD on a swath of 24 km), next to the medium-resolution wide-swath imager SLIM6 of the DMC series.
• The imagery produced by the DMC satellites was initially used for international disaster monitoring and national campaigns by the satellite owners. Through DMC International Imaging Ltd. (DMCii), the DMC imagery was also exploited commercially in campaigns that needed large area coverage such as vegetation monitoring of the whole of Europe for the European Space Agency (ESA), and yearly campaigns of the Amazon rainforest, keeping an eye on illegal logging. These commercial campaigns generated significant revenue that flowed back to each of the satellite owners (Ref. 35).
Timeframe | DMC constellation generation | Description |
2003 | DMC-1 | First generation with 32 m GSD m/s & 600 km wide swath (4 m GSD pan on Beijing-1), in orbit since 2003 |
2009 | DMC-2 | Current generation providing 650 km wide-swath, 22 m GSD, in orbit since mid-2009 (Deimos-1, UK-DMC-2); 2.5 m GSD pan; NigeriaSat-2 and NigeriaSat-X were launched on August 17, 2011. |
2014 | DMC-3 | Next generation VHR constellation of 3 satellites with ~1 m GSD pan and 4 m MS data on a 20 km swath |
2015 | DMC-4 | Hyperspectral imaging |
2016 | DMC-5 | SAR (Synthetic Aperture Radar) mission to provide all-weather, day-&-night coverage |
Overview
As of Oct. 2006, Deimos Imaging SL of Boecillo–Valladolid, Spain, a subsidiary of Deimos Space SL, and Surrey Satellite Technology Ltd (SSTL) of Surrey, UK, signed a contract for an Earth-imaging satellite, Deimos-1. The satellite is being built by SSTL to be ready for launch in late 2008 and will form part of the existing and operational DMC (Disaster Monitoring Constellation). The satellite will provide imagery for commercial applications, government use and for rapid-response following disasters.
The DMC is a unique international collaboration of member nations and, through this contract, Spain joins the existing countries in the consortium (Algeria, China, Nigeria, Turkey and the UK). Each member of the consortium owns and operates its own satellite whilst cooperating with the other members of the consortium. The model of cooperation has significant benefits - it allows information generated on board one satellite to be used by other members of the consortium. 8) 9)
This contract with SSTL will provide Deimos with an enhanced version of the DMC wide-area imaging system. The new system will image 660 km wide swaths of the Earth in three spectral bands at a ground resolution of 22 m, rather than using the standard 32 m DMC imager (of the first generation). The contract also covers the provision of the ground system to allow the operation of the satellite from Valladolid, Spain and it establishes SSTL as the launch agent for the procurement of launch services. 10) 11) 12) 13) 14) 15)
Note: Deimos-1 is part of the DMC, but Deimos Imaging is the owner and operator of the Deimos-1 satellite, and markets its images and value-added products worldwide.
The Deimos-1 spacecraft will be focused on providing imaging services within the Iberian Peninsula region and Europe, but will also be used elsewhere around the globe. Alongside this, the missions will also support disaster monitoring as part of the international charter for space and major disasters.
A key customer requirement is to deliver complete coverage of Spain and Portugal within 5 days using a combination of operating modes. This requires a significant increase in the number of scenes per day delivered to the customer, compared to the original DMC spacecraft. A balance is struck between covering the maximum area per orbit, which requires a subsequent orbit or orbits to downlink all the data, and reducing the area covered but allowing all operations to be conducted within an orbit. A future goal for SSTL missions is to allow stripmap imaging, where the imager can be run continuously in parallel to downlinking for the sunlit part of the orbit.
Spacecraft
The next generation spacecraft are designed, building upon the extensive experience built up through the first generation DMC system. Both Deimos-1 and UK-DMC-2 spacecraft are developed to carry out a commercially-focused operational imaging mission, supporting rapid-response, large-area mapping for a range of applications.
Enhancements in these new-generation DMC spacecraft include a modified payload design allowing a transition to a lower ground sampling distance whilst maintaining the 600 km swath. Improved power and data handling subsystems allow a greater imaging capacity so that swath lengths of up to 1000 km can be captured. The higher imaging capacity is augmented by an X-band downlink operating at 40 Mbit/s.
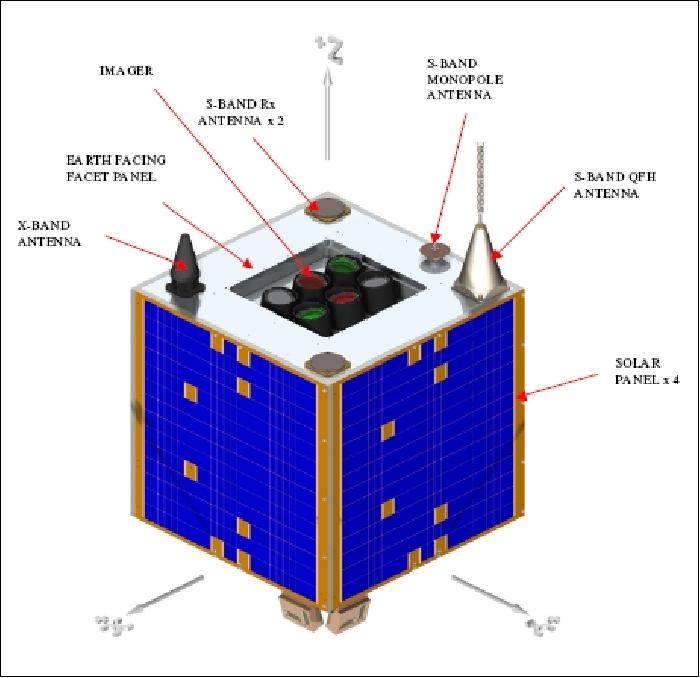
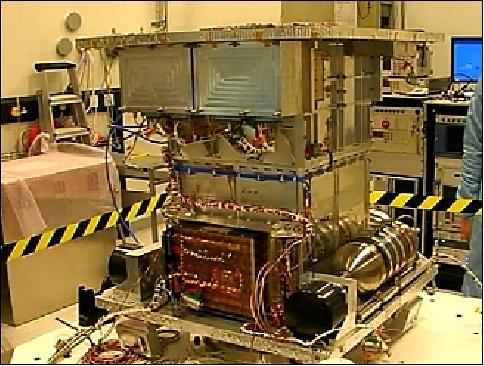
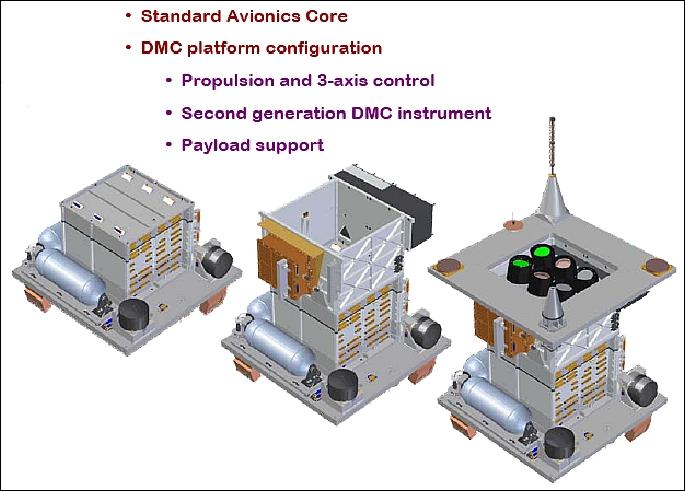
Each satellite incorporates many enhancements over the existing DMC-1G series, effectively starting a new series with a platform, referred to as SSTL-100 (first used in 2002), based on current technologies. The spacecraft structure employs Aluminum-alloy and Aluminum honeycomb panels and has been designed to be compatible with a wide range of launchers. The internal structure includes a stack of "micro-tray" modules traditionally used by SSTL in all its microsatellites. However, a number of "nano-trays" of SNAP nanosatellite heritage are also included. The stack of trays carries an optical platform, and between the stack and the panels, the battery, wheels and propulsion system are carried. Each spacecraft employs a fully passive thermal control system.
Each spacecraft features a mass envelope equivalent to the current DMC series (~88 kg for Deimos-1, and 96 kg for UK-DMC-2). The size is (X, Y, Z): 630 mm x 660 mm x 640 mm). The design life is 5 years.
The AODCS (Attitude and Orbit Determination and Control Subsystem) provides 3-axis momentum-biased attitude control. An in-house developed GPS receiver, SGR-07 (Space GPS Receiver-07), is used to determine the orbit and to provide accurate timing information. The SGR-07 is a lower power and stripped-down version (reduced size) of the SGR-10, with 12 C/A channels, and a single antenna (Figure 3). The mass is 450 g per unit, plus 55 g for the patch antenna, and it takes approximately 1.6 W power at 28 V. The UK-DMC-2 flight represents the first installation of the SGR-07 receiver. 16)
Dual-axis sun sensors on the four sides of the spacecraft and dual redundant vector magnetometers provide attitude knowledge by measuring the sun-angle and Earth's magnetic field. - Based on the sensor knowledge, three magnetorquers which generate a torque by interacting with the Earth's magnetic field, and three reaction wheels (MicroWheel) are used to control the attitude and attitude rates and maintain attitude pointing during various mission stages (attitude knowledge ) to < ±0.25º. A gravity gradient boom is employed to provide a high degree of platform stability, constraining the body-rotation rates to < ±2.5 mdeg/s.
Wheel type | Peak momentum | Peak torque | Mass+electronics | Power constant speed | Power at peak torque | Heritage |
MicroWheel-10S-E | 0.42 Nms | 10 mNm | 1.1 kg | 1.2 W | 5.0 W | AlSat-1 (2), UK-DMC (2), BILSAT-1 (4), TopSat (4), NigeriaSat-1(2), Beijing-1 (4), CFESat (3) |
MicroWheel-10SP-S | 0.42 Nms | 10 mNm | 1.1 kg | 1.2 W | 5.0 W | RapidEye (20), Deimos-1 (3) |
MicroWheel-10SP-M | 0.42 Nms | 10 mNm | 0.96 kg | 0.7 W | 5.0 W | NigeriaSat-2(4), UK-DMC-2 (3), NX (4) |
SmallWheel-200SP | 12 Nms | 200 mNm | 5.4 kg | 16 W @ 12 Nms | 120 W | GIOVE-A (4), Kanopus (12), GIOVE-A2 (4), NigeriaSat-2 (4) |


EPS (Electric Propulsion Subsystem):
Deimos-1: Four body-mounted GaAs solar panels and a 15 Ah Li-ion battery. A raw 28 V bus is distributed, alongside a regulated 5 V bus. Lines are electronically switched and over-current protected with electronic switches. The system delivers over 30 W orbit-average to the platform and payloads, with 12 W for the platform, ~ 16-20 W available for payload operations.
UK-DMC-2: Three body-mounted heritage solar arrays are used containing GaAs/Ge single-junction solar cells providing 65 W at AM0 and 25ºC. The fourth body-mounted solar array has been replaced by a deployable solar array containing Emcore triple-junction InGaP/InGaAs/Ge solar cells which provide 65 W at AM0 and 28ºC. Because this panel is deployed at an angle of 110º, it increases the total OAP (Orbit Average Power) by 60 %.
A Li-ion battery (15 Ah capacity, of ABSL Space Products) is used to be able to continue operations through the Earth's eclipse phase and to provide extra power during heavy operations. - The rest of the power subsystem consists of a BCR (Battery Charge Regulator) module and a PCM/PDM (Power Conditioning and Power Distribution Module) to regulate the power coming from the solar panels and battery and to distribute the power to all subsystems. A raw 28 V bus is distributed, alongside a regulated 5 V bus.
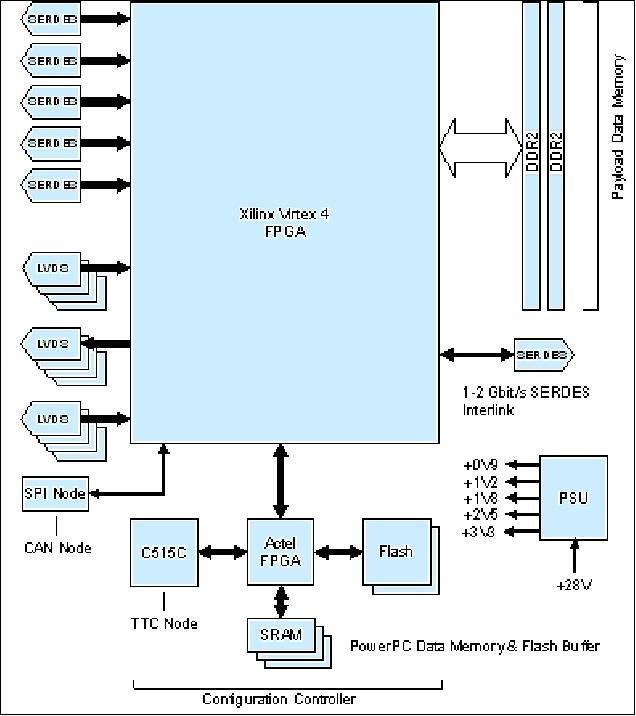
DHS (Data Handling Subsystem):
Two redundant Intel 386-based OBCs (On-board Computers) are used for onboard data handling. The OBCs provide communications between subsystems, monitor the temperature and current consumptions, maintain log files and execute the imaging schedule. The data handling subsystem uses a CAN (Controller Aerea Network) bus for onboard data exchange.
Propulsion subsystem:
A propulsion subsystem is needed to be able to operate as part of the constellation. The heritage DMC Butane cold gas monopropellant subsystem is used to correct for possible launcher injection errors, phasing manoeuvres with other spacecraft and a potential EOL (End-of-Life) manoeuvre to reduce the time it takes before re-entry into the atmosphere. At BOL, the orbit parameters are selected to optimize the orbit altitude reduction and LTAN (Local Time of the Ascending Node) drift without the use of the propulsion subsystem, but small corrections over life are supported.
The propulsion subsystem delivers ~ 20 m/s ΔV, and comprises 2 cylindrical tanks holding 2.3 kg of propellant, and a single low-thrust thruster augmented by a small resistojet to boost its efficiency. The system is housed on the spacecraft base-plate, alongside the propulsion-controller electronics.

RF communications: The S-band is used for TT&C transmissions while the X-band downlink is used for the transmission of payload imagery. The S-band uplink uses dual redundant 9.6 kbit/s CPFSK receivers, each having 2 patch antennas; they are providing an omni-directional antenna pattern to maintain the RF link at all times. The TT&C downlink is provided by redundant 38.4 kbit/s BPSK (Bi-Phase Shift Keying) modulated S-band transmitters, each with 2 monopole antennas to provide an omni-directional antenna pattern.
There are two redundant X-band transmitters, each is using the DQPSK (Differential Quadrature Phase Shift Keying) modulation technique and Viterbi convolutional encoding with r=1/2 and k=7 for optimized spectral efficiency. Both transmitters are connected to a Saab isoflux antenna on the Earth Facing Facet. The data rate is selectable on orbit between 20 and 80 Mbit/s.
The payload downlink is designed to maintain a positive link margin when transmitting data to the UK-DMC-2 ground station with a BER (Bit Error Rate) of < 10-6. For downlinks to receive-only ground stations, a BER of <10-9 is required and for smaller ground stations a data rate of 20 Mbit/s may be selected to maintain a positive link margin.
An onboard data storage capacity of 8 GByte is provided using two 2 GByte SSDRs (Solid-State Data Recorders). For UK-DMC-2, a newly developed 8 Gbyte HSDR (High-Speed Data Recorder) has been added for increased storage and a faster downlink data rate. For full swath imaging, both SSDRs are used, each connected to one of the imager banks. The HSDR is able to receive imager data from both banks in parallel. Where the SSDRs can downlink their data at 20 Mbit/s, the HSDR can support the high-speed 80 Mbit/s downlink as well.

Launch
The Deimos-1 and UK-DMC-2 spacecraft were launched on July 29, 2009. The launch vehicle was Dnepr-1, and the launch site was Baikonur, Kazakhstan. The launch provider was ISC Kosmotras (a joint venture of Russia, Ukraine and Kazakhstan).
The shared payload manifest of the launch was:
• DubaiSat-1 an imaging minisatellite of the UEA (United Arab Emirates) Institution for Advanced Science and Technology (EIAST) is the main payload on this flight (mass of ~ 190 kg)
• Deimos-1, UK-DMC-2
• AprizeSat-3, AprizeSat-4, LEO communication experiments of Aprize Satellite Inc., Fairfax, VA, USA (each with a mass of 12 kg)
• NanoSat-1B of INTA, Spain (23.5 kg).
Orbit of main payload: Sun-synchronous near-circular orbit, altitude of ~661 km, inclination = 98º, the orbital period is about 97.7 minutes, the LTAN (Local Time on Ascending Node) is at 10:39 hours.
Deimos-1 and UK-DMC-2 will separate from the launch vehicle marginally earlier than the main payload.
- The result is that these satellites will have a small eccentricity in their orbits
- Apogee will be at 680 km
- Deimos-1 perigee will be ~ 642 km, UK-DMC-2 perigee will be ~ 632 km (both spacecraft will have 10:30 LTAN). Both spacecraft have also sufficient ΔV to circularize into a sun synchronous orbit suitable for long term operations and mission requirements (ΔV carried is ~ 20 m/s).
Mission Status
• October 6, 2016: The bright blue tendrils of the low-lying Irrawaddy Delta in Myanmar are unmistakable from space (Figure 9). Irrawaddy is a densely populated alluvial floodplain — an area that produces 60 per cent of the country's rice crops. Every year, the delta's surface advances into the Andaman Sea by approximately 50 meters thanks to heavy rainfall and the Irrawaddy River's sediment load. 19)

• February 2016: The Deimos-1 spacecraft and its payload are operating nominally in 2016. 20)
• July 15, 2015: The UrtheCast Corporation today acquired the Earth Observation business Deimos Imaging from Elecnor, S.A. (Spain) for an aggregate price of €76.4 million. In addition to ownership and operation of the Deimos-1 and Deimos-2 satellites, UrtheCast has acquired satellite operations related to the collection, storage, processing, analysis, distribution, and licensing of imagery captured by these and other satellites. The combination of UrtheCast and Deimos operations is expected to significantly accelerate UrtheCast's strategies related to distribution, web platform development, and the building out of the UrtheCast Constellation. 21) 22)
- In conjunction with the Acquisition, UrtheCast has entered into a Mutual Cooperation Agreement with Deimos Space, S.L.U. ("Elecnor Deimos"). This agreement contemplates the participation of Elecnor Deimos as a strategic implementation partner for UrtheCast's planned 16-satellite constellation consisting of both optical and SAR instruments. Elecnor Deimos will join the other strategic partners expected to be involved in UrtheCast's constellation, which includes various Canadian companies expected to build elements of the SAR payload, as well as SSTL (Surrey Satellite Technology Ltd.), UK for the spacecraft platforms and optical payload (Ref. 22).
- Deimos Imaging (Spain), a subsidiary of UrtheCast Corp. (Canada), owns two commercial Earth Observation (EO) missions, Deimos-1 and Deimos-2. Deimos Imaging is in charge of operating both satellites and commercializing their imagery.
• March 2015: The Deimos spacecraft and its payload are operating nominally in 2015.
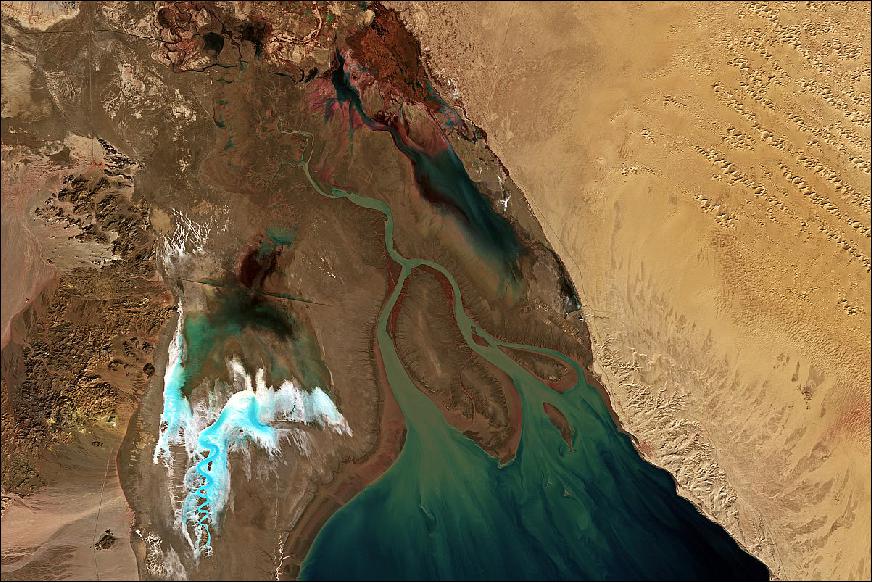
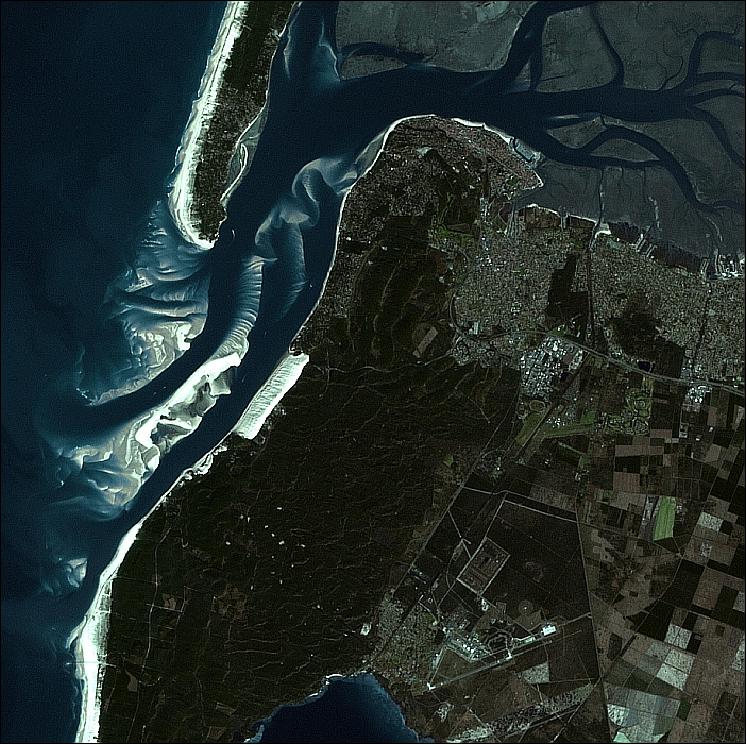
Legend to Figure 10: The Colorado river flowing into the Gulf of California - also referred to as the Sea of Cortés, is pictured in this satellite image. The delta is located between the two Mexican states of Baja California (left) and Sonora (right). The large island visible in the image's center is Montague.
• August 2014: The image of Figure 11 shows the Miankaleh Wildlife Sanctuary and Wetland (Iran) situated in the extreme south-eastern part of the Caspian Sea. Miankaleh peninsula is one of the richest ecological havens in West Asia. 23)

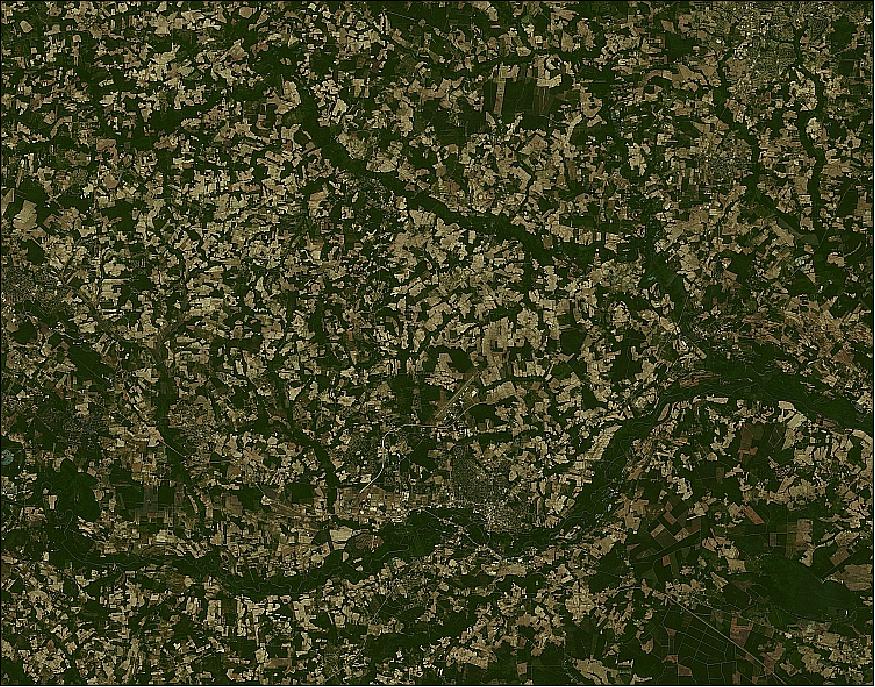
• June 2014: Figure 12 is an image of agricultural land in Saratov Region (Russian Federation). The Saratov Region is among the most significant agricultural regions of Russia. Major crops are grain and oil seeds. Banks in the field borders, rill erosion, crops, irrigation channels, etc. can be easily identified in the image. 24)

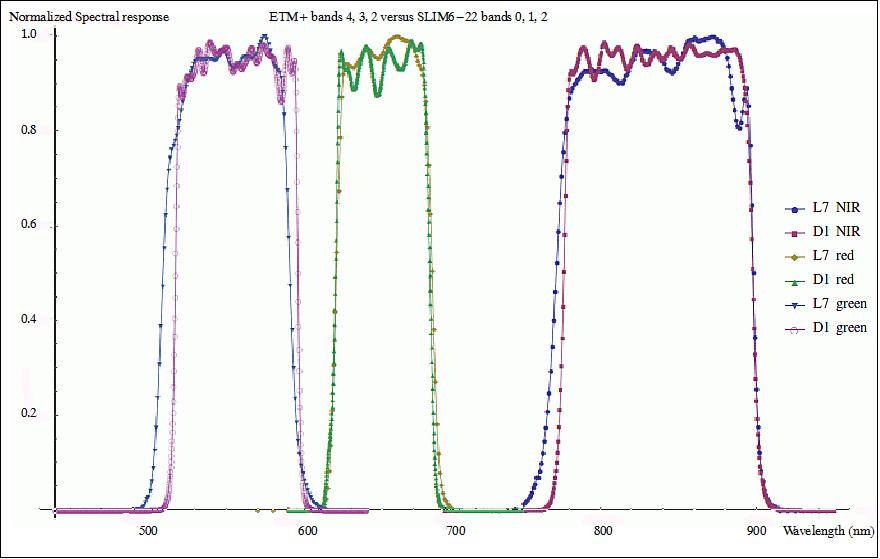
• April 2014: Deimos-1 Cross-calibration with Landsat-7 and Landsat-8 missions. The procedure is inherited from DMC: 25)
- Deimos-1 lacks on-board calibration devices
- ETM+ is the "golden standard" of the Deimos-1 project. We do not cross-calibrate with ETM+, we calibrate with ETM+
- Raw material for calibration is gathered by periodically acquiring images over the CEOS pseudo-invariant calibration site Libya-4. Typically twice a month
- These measurements are complemented with acquisitions over Dome-C, the Pacific in eclipse and other PICS in addition to Libya-4
- The calibration is validated through vicarious campaigns.
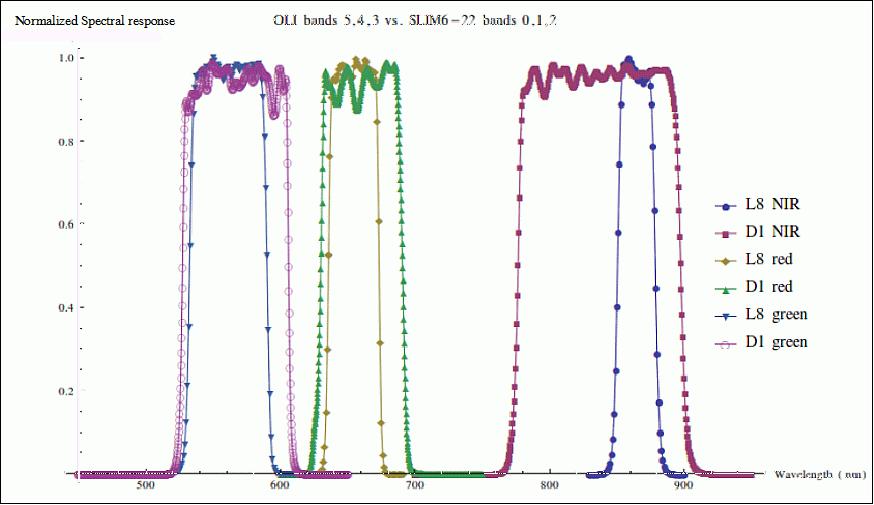
New "close approach" methodology:
- Not enough Landsat-8 data yet to follow Landsat-7 cross-cal methodology
- Comparison using data from "close encounters", taking advantage of different orbit directions (D1 ascending, L8 descending)
- The project has to rely on a relatively low number of measurements
- Constraints: ± 15 minutes of time gap, ± 5º off-nadir angle
- Reduced experimental error: Atmospheric effects, BRDF effects.
• Figure 15 of Deimos-1, acquired on March 9, 2014, shows Acklin Island, part of a group of Bahamian islands, it defines a large, shallow lagoon called the Bight of Acklin. The morphology of the land is low and flat, with ridges that usually rise no more than 15 to 20 m. 26)

• The Deimos-1 spacecraft and its payload are operating nominally in 2014.

• The Deimos-1 spacecraft and its payload are operating nominally in 2013. Deimos-1 is a member of the DMC (Disaster Monitoring Constellation). 28)
• Sept. 2012: Deimos Imaging is successfully operating Deimos-1 for 3 years (since July 2009) without a break even in the first year of operations. 29)
- Independently of the GMES dataset, Deimos-1 provides a yearly, almost cloud-free, coverage of Africa (Figure 19).
• Deimos maintains data distribution partnerships with:
- AstriumGEO-Information Services
- DMCii
- Sovzond.
• 2012 US Crop Season Collection Program: Campaign 1: April 16-30; campaign 2: May 1-15; campaign 3: May 16-31; campaign 4: June 1-15; campaign 5: June 16-30; campaign 6: July 1-15; campaign 7: July 16-31; campaign 8: Aug. 1-15; campaign 9: Aug. 16-30; campaign 10: Sept. 1-15; campaign 11: Sept. 16-30; campaign 12 (collection extension): Oct. 1-15; campaign 13: Oct. 16-31; campaign 14: Nov. 1-15; campaign 15: Nov. 16-30.
Delivery of moderate resolution multispectral satellite imagery to support USDA (United States Department of Agriculture) users. Complete Coverage of the lower 48 States. The project team consisted of: 30)
- Astrium GEO Information Services – Prime
- Elecnor Deimos Imaging – Subcontractor, with DMCii as subcontractor to Elecnor Deimos Imaging.
2012 project summary:
- 1,696 images acquired
- 153 Million km2 of cloud-free imagery delivered (179 M km2 delivered total)
- 100 % of data orthorectified within one pixel @ CE90
- 99.1% delivered with 72 hours.
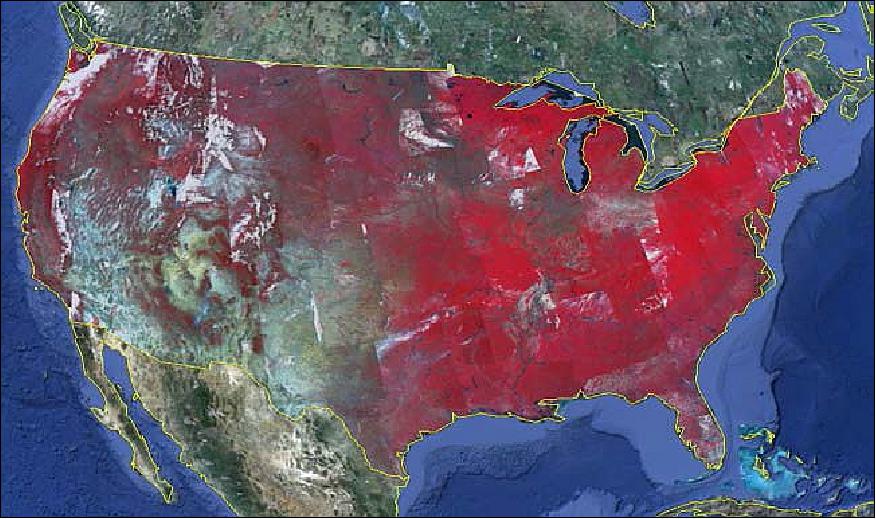
A total of 34 bi-weekly cloud-free coverages of the US provided to USDA via SICORP during 2011, 2012 and 2013 crop seasons, with Deimos-1 & UK-DMC2 data (Ref. 25).

• The Deimos-1 spacecraft and its payload are operating nominally in the summer of 2012. The current production rate of imagery is 2.5 million km2/day. The main figures of Deimos-1 production in its first 2.5 years of operations: 31)
- >12,000 images acquired (75% cloud-free)
- Coverage so far: 900 million km2 (6 times Earth's land surface).
- During the crop growing season in 2011, multitemporal coverage of the continental USA was delivered to USDA (12 coverages of Deimos-1 and UK-DMC-2 imagery were provided between May and October 2011.
Legend to Figure 20: The image shows the highest dunes in Europe located in the Southwest of France at Arcachon Bay. With approximately 60 million cubic meters of sand, it occupies part of an adjacent forest.

Legend to Figure 21: In December 2010 Dawson River exceeding 14.6 m flooded Theodore, causing significant economic damage. The image shows the area one year later.

Legend to Figure 22: This Deimos-1 image, acquired on Nov. 9, 2011, shows In Nyingchi, located in the Grand Canyon of the Yarlung Zangbo River, in Tibet. It is considered by some to be the last clean place on the planet thanks to its isolation and difficulty to access.
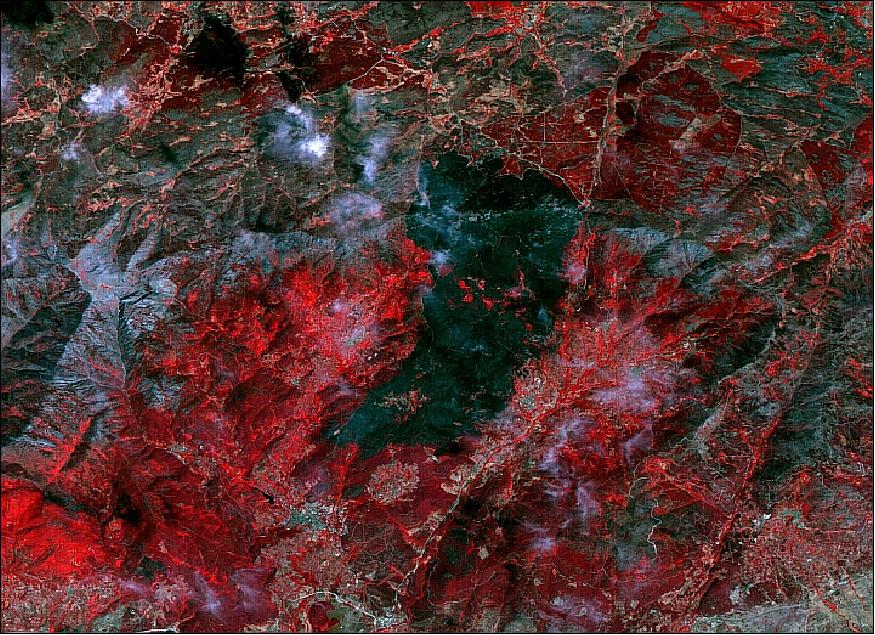
• On May 29, 2011 in the Bear Wallow Wilderness area, Arizona's largest wildfire was ignited. Named the "Wallow Fire," authorities believe the fire was caused by an unattended campfire. At its height, the Wallow Fire encompassed over 841 square miles of terrain, including 25 square miles in New Mexico. Nearly 10,000 people were evacuated, forcing numerous road and campground closures (Figures 23 and 24). 32)


• The Deimos-1 spacecraft and its payload are operating nominally in 2011. 33)
- Deimos-1 calibration (both absolute and relative to Landsat-7) is considered top priority for DEIMOS-1
- DEIMOS-1 data is constantly calibrated according to CEOS guidelines and validated w.r.t. Landsat-7. The results of absolute calibration are within 5% accuracy, and relative calibration with Landsat-7 is within 1-2%.
- DEIMOS-1 data can be seamlessly included in the nominal U.S. NASS-CDL (National Agricultural Statistics Service-Cropland Data Layer) process, with a resulting accuracy very similar (within a few%) to Landsat-7 (Ref. 33).

Legend to Figure 25: The image shows the dams of the Dutch region of Zeeland. They are considered one of the great hydraulic works of humanity and evidence the titanic struggle of this country against the forces of nature.
• The Deimos-1 spacecraft and its payload are operating nominally in 2010. The spacecraft turned operational in March 2010 (Ref. 25).
• In Feb. 2010, Deimos-1 provided the first batch of imagery to GMES. The European program GMES relies on existing satellites to build up and demonstrate operational capabilities, among them on Deimos-1. - Several DMC satellites similar to Deimos-1 are joining forces to provide imagery of the whole African tropical forest to the European Union. ESA is managing the program and has responsibility for the timeliness and quality of the delivery.
• After its launch on July 29, 2009, the Deimos-1 satellite obtained its first image on August 5, 2009.


Sensor Complement
SLIM6 (Surrey Linear Imager Multispectral 6 channels - but 3 spectral bands)
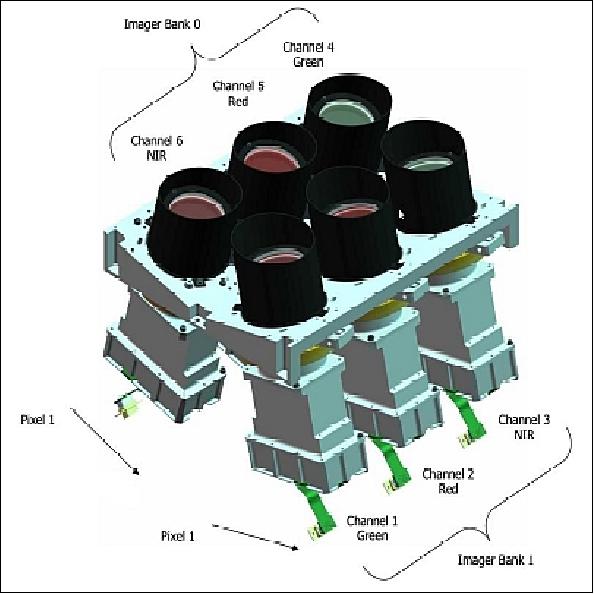
The upgraded SLIM6 consists of two bore‐sighted instrument banks. The SLIM6 design provides for a nadir-viewing, three-band multispectral scanning camera capable of providing mid-resolution image information of the Earth's surface.
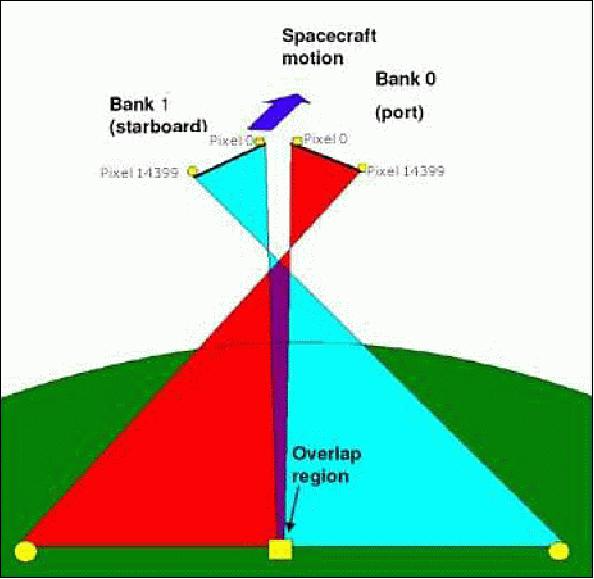
Three spectral bands are provided in the ranges: 0.52-0.62 µm (green), 0.63-0.69 µm (red), and 0.76-0.9 µm (NIR). The SLIM6 bands come close to those of Landsat-7 bands 2, 3, and 4. SLIM6 employs the pushbroom imaging technology using two cameras per band (mounted in a double-barrel cross-track configuration - or in two banks) thus providing a dual (slightly overlapping) swath with a combined swath width of > 600 km with a spatial resolution 22 m GSD (Ground Sampling Distance) at nadir.
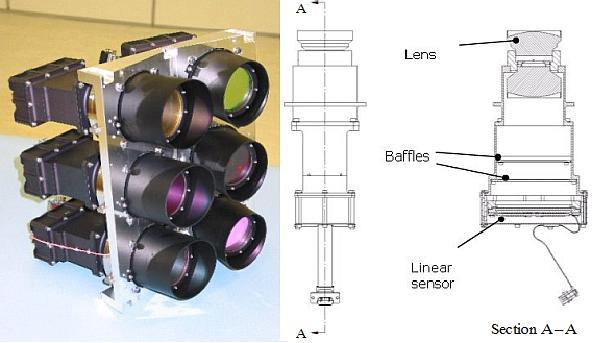
The imager comprises six lens and sensor pairs, configured in two banks as part of an overall optical bench assembly. The banks are mounted angled away from nadir by approximately 13º, to double the swath width, but with a small overlap of approximately 5% to aid image stitching. The FOV (Field of View) from each bank is 26.6º.
The instrument design has been improved since the first generation, in order to support data quality, radiometry, and calibration. The lens system has been modified to improve the GSD from 32m to 22m, and by employing a larger dimension linear array, the same swath width can be maintained. The SNR (Signal-To-Noise) ratio goal has also increased.
On-orbit calibration techniques have evolved given experience with the first-generation system, the radiometric accuracy prior and following launch, and the relative radiometric stability are specified. Finally, a new alignment and focusing mechanism are included to support rapid setup of the instrument.
Sensor (detector) | Eastman Kodak KLI14403 linear CCD sensor. 14,400 array with 5.0 x 5.0 µm/ pixel |
Spectral bands (3) | 0.52-0.62 µm (green), 0.63-0.69 µm (red), and 0.76-0.9 µm (NIR) |
Lens | Custom design, 155.9 mm focal length lens, f/5 |
IFOV | 32.07 µm (or 0.00184º or 6.62 arcsec) |
GSD | 22 m |
FOV per channel | 26.6º, TFOV = 52º (due to two banks of imagers) |
Swath per channel | 330 km |
Total imaging swath | ~ 620 km |
Standard scenes | 80 km x 80 km |
Data quantization | 8 bit or 10 bit digitization (selectable) |
SNR | > 100 (rms across field) |
Each SLIM6 imager channel has a solid-state detector at the focal plane. The spectral filters for the bands are located in front of each channel lens. To protect the filter a fused silica radiation protection window is set in front of the filter.
The detector output is digitized to 12 bits and processed either to 10 bits or 8 bits radiometric resolution. The pushbroom system is capable of providing continuous imagery in flight path direction. The source data are stored in an onboard solid-state memory of 2 x 2 GByte capacity. SLIM6 features also a windowing capability. This function was introduced to avoid saturation of the storage units and add more flexibility during satellite operations.
The operations strategy targets maximum imaging time in the sunlit phase of the orbit. Operating modes with imaging and downlinking data during each orbit, and imaging orbits followed by downlinking orbits have been developed.
The SLIM6 instrument operates in the store-and-forward mode so that images can be taken out of range of any control stations. Payload data remain stored onboard until the spacecraft is commanded to return the data once in contact with one of the network ground stations. The payload, therefore, comprises two banks of channels, two solid-state data recorders, and two high-speed downlinks. A balance has been struck between cost and performance. Payload operations are fundamental resources limited by the onboard power available at the end-of-life, and by onboard storage.
The system design constrains the spacecraft at end-of-life, and under worst-case power availability, on every orbit to:
1) Take images filling half its data recorders
2) Return all these data to a single station.
In practice, the system is well balanced between these constraints, but there are cases where any of these becomes the limiting factor. Data storage becomes the limiting factor when the spacecraft does not transit stations on several successive orbits, and power is the limiting factor when the spacecraft transits several stations in a single orbit.
Summer 2014: In retrospect, SSTL refers to the SLIM6 imaging system also as the "EarthMapper" and the Deimos-1 and UK-DMC-2 missions are considered the first EarthMapper demonstration missions. 34)
Technical Advancements
The following list enumerates some of the improvements that have been implemented over the past seven years with successive launches of the SSTL-100 platform of the DMC (Disaster Management Constellation). 35) 36)
• The SSTL-100 platform has been a very successful platform in the SSTL family of spacecraft. With seven platforms launched, the heritage of the platform is extensive and can be built quickly and affordably.
The first spacecraft based on the SSTL-100 platform, AlSat-1, was launched in 2002. Designed and built together with the Algerian Centre National des Techniques Spatiales (CNTS), it marked the start of the DMC (Disaster Monitoring Constellation) and was the first SSTL spacecraft to carry SSTL's newly developed SLIM6 Line Scan Imager payload. In August 2010 the mission was completed after 7 years and 9 months of operations, exceeding its 5-year design lifetime by 50%.
• A further 3 spacecraft based on the SSTL-100 platform, UK-DMC, NigeriaSat-1 and BILSAT, were launched into the DMC in 2003. These spacecraft worked together with AlSat-1 to provide global disaster monitoring.
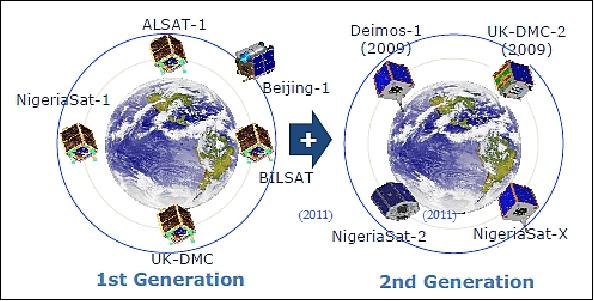
Legend to Figure 32: Of the 1st generation constellation, the spacecraft NigeriaSat-1, UK-DMC and Beijing-1 are operational in the fall of 2011. The BILSAT whose operations were terminated in August 2006 after nearly 3 years of service provision. The AlSat-1 operations were terminated in the summer of 2010. - Of the 2nd generation constellation, Deimos-1 and UK-DMC-2 are operational in 2011 while NigeriaSat-2 and NigeriaSat-X (both spacecraft were launched on August 17, 2011) are still in the commissioning phase as of October 2011.
• In 2009, a further 2 SSTL-100 spacecraft, UK-DMC-2 and Deimos-1, were launched. The spacecraft Deimos-1 and UK-DMC-2 are being partially funded by projected data sales and are operated by the commercial companies Deimos Imaging SL and DMCii Ltd., respectively. Both spacecraft carry an improved SLIM6 Line Scan imager payload with a 22 m GSD (Ground Sampling Distance) and an order of magnitude more imagery throughput compared to the first-generation DMC.
• In late October 2010, a further 2 SSTL-100 spacecraft will be launched. NigeriaSat-X will be another addition to the DMC carrying the same payload as Deimos-1 and UKDMC-2. This spacecraft has been built together with Nigerian engineers.
• The MTF (Modulation Transfer Function) characteristics and SNR (Signal to Noise Ratio) have been improved compared to the first generation 32 m DMC imagers. The MTF performance of UK-DMC-1 and UKDMC-2 is shown in Figure 2 as they were measured before launch.
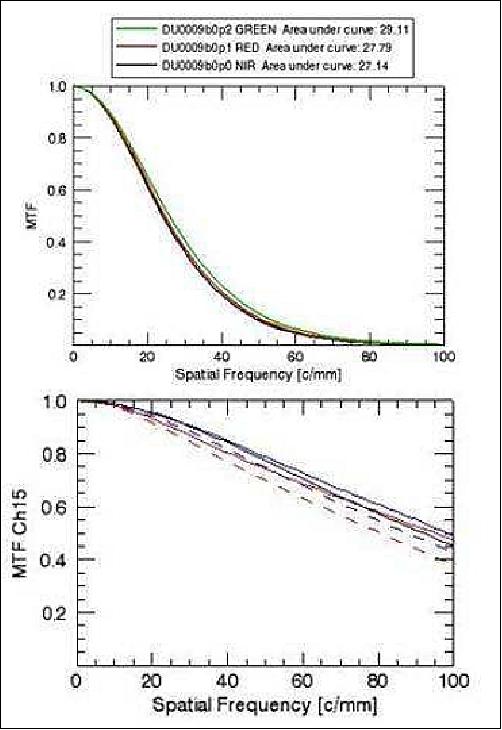
The MTF and spatial resolution improvement can be clearly seen when raw imagery is compared. Figure 34 shows an image of Texas Fort Worth airport taken by UK-DMC-1 and UK-DMC-2 where the striking difference in MTF and spatial resolution can be seen. Small urban roads are clearly visible in the UK-DMC-2 image, while blurred in the UK-DMC-1 image.

• The original SLIM6 Line Scan Imager, first operational in space in 2002, consisted of a COTS (Commercial Off The Shelf) optics design and a COTS detector. This imager produced 32 m GSD imagery in three wavebands (red, green, NIR) and at a very wide swath (>600 km). - In 2009 the DMC-2G imager came into service. This imager consisted of a custom optics design and an upgraded detector and electronics. This upgrade improved the GSD to 22 m, doubling the data density of the imagery and improved the MTF significantly, while still maintaining the wide swath of the original imager.
• On-board data storage: In 2002 the first DMC generation used SSDRs (Solid State Data Recorders) capable of storing up to 1.5 GByte of imagery and downloading this data in S-band at a maximum rate of 8 Mbit/s. By 2009, the second generation spacecraft UK-DMC-2 and Deimos-1 carried a HSDR (High-Speed Data Recorder) capable of storing up to 8 GByte worth of data, paired with X-band downlinks providing data rates of up to 80 Mbit/s.
In the last couple of years, minor changes to the design have expanded the capacity of one HSDR to 16 GByte. These data recorders can be accommodated in the SSTL-100 either in a set of 2 or 3, thus providing up to 48 GByte of storage. Real-time hardware JPEG-LS compression can be implemented inside the HSDR FPGA, providing a lossless compression ratio of 2.8:1 or lossy compression ratio of 4:1 or higher.
• X-band downlink developments: The first DMC spacecraft in 2002 used an S-band downlink system capable of downlinking at 8 Mbit/s. The UK-DMC-2 and Deimos-1 missions in 2009 made use of X-band technology that was developed under the Beijing-1 mission in 2004. The data rate of these transmitters is up to 80 Mbit/s, increasing the amount of data that can be downlinked to the ground by a factor of 10.
Further development in X-band technology for the NigeriaSat-2 project makes use of dual polarization and APM (Antenna Pointing Mechanisms). On the SSTL-100 it is going to be challenging from a mechanical point of view to include these APMs.
• Generated power developments: The first DMC spacecraft made use of four body-mounted panels, each with 288 single junctions GaAs/Ge solar cells with a cell efficiency of 19.2% at 28ºC. The sun-synchronous orbit with 10:30 hours LTAN causes the 4th panel to permanently point away from the sun in the operational life of the spacecraft. This configuration generated 26.5 W OPA (Orbit Average Power) under worst-case temperature, beta angle and solar flux and at end of life.
- For the Deimos-1 mission, 10 cells per panel were added, increasing the generated power by more than 20% to 32 W.
- The UK-DMC-2 mission makes use of the technology developed during the CFESat program by adding a deployable panel with triple junction InGaP/InGaAs/Ge cells with a cell efficiency of 27.5%. This addition increases the OAP by 56% to 50 W.
In the near future solar cells with efficiencies of 30%-33% will be available commercially boosting the generated power even further into the range of 87 W to 96 W.
• AOCS (Attitude and Orbit Control Subsystem) developments: The current AOCS system of the SSTL-100 makes use of sun sensors, magnetometers and reaction wheels to control its attitude. This system is adequate for the applications of the DMC. Due to its wide swath, geolocation is relatively simple and the 20-30 m GSD has no strict requirements for pointing control. However, the continuing increase of the resolution of the imager payload (in the past and the future) and the requirement to be able to off-point the spacecraft when a high-resolution imager is accommodated on the platform will require an update to the AOCS system.
- One of the new developments that have been included as a flight experiment on UK-DMC-2 is the FSS (Fine Sun Sensors). These sun sensors have minimal impact on the spacecraft and can be included inside the current sun sensor assembly. The sun sensors are designed to have a pointing knowledge of 0.1º, which would improve the pointing of the spacecraft by an order of magnitude. As the moments of inertia of the SSTL-100 platform are relatively small, off-pointing maneuvers are possible by using the current reaction wheels and when sufficient settling time is allowed the fine sun sensors should give enough pointing knowledge to adequately geolocate the image taken by the imager payload.
A further development that has been considered is the introduction of a star camera on the SSTL-100 platform. In the past, experimental star cameras have been included on the platform, but these sensors were not operated in-the-loop and had limited baffles. - In the future a star camera could be added to the AOCS system of the SSTL-100, which would improve the pointing knowledge especially when performing off-pointing maneuvers, but the mechanical impacts to the platform need to be assessed.
The list of this chapter shows clearly, that over the past 7 years, the capability of the SSTL-100 platform and its payload has improved dramatically, and will keep improving dramatically in the coming years. This was achieved thanks to the gradual improvement of the subsystems.
References
1) P. Stephens, D. Hodgson, S. Mackin, G. Crowley, "DMC: New sensors & capabilities enhance the coordinated constellation EO service," Proceedings of the 58th IAC (International Astronautical Congress), International Space Expo, Hyderabad, India, Sept. 24-28, 2007, IAC-07-B1.6.02
2) A. M. Baker, P. Davies, L. Boland, "Moving Towards Commercial Earth Observation Services with Small Satellite Constellations," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
3) Zeger de Groot, James Penson, Adam Baker, Paul Stephens, "Getting the bigger picture: more bytes for your buck," Proceedings of the 22nd Annual AIAA/USU Conference on Small Satellites, Logan, UT, USA, Aug. 11-14, 2008, SSC08-III-4
4) A. Fernandez García, A. da Silva Curiel, P. Davies, J. Penson, Z. de Groot, D. Hodgson, P. Stephens, "Deimos-1 - The Next Generation of Commercial DMC Spacecraft," Proceedings of the IAA Symposium on Small Satellite Systems and Services (4S), Rhodes, Greece, May 26-30, 2008
5) A. M. Baker, P. Davies, L. Boland, "Moving Towards Commercial Earth Observation Services with Small Satellite Constellations," Proceedings of the 6th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 23 - 26, 2007
6) Paul Stephens, "The Disaster Monitoring Constellation, New Sensors & Data Policy," BARSC (British Association of Remote Sensing Companies) Workshop 2008, London, June 12, 2008
7) Martin Sweeting, "Microsatellites moving from research to operational missions," UN/Austria/ESA Symposium on Small Satellite Programs for Sustainable Development: Payloads for Small Satellite Programs, Sept. 21-24, 2010, Graz, Austria
8) https://web.archive.org/web/20061019061053/http://www.ballard.co.uk/press_releases/company_releases.aspx?story=580
9) http://www.deimos-imaging.com/
10) http://www.deimos-imaging.com/technology/our-satellite-deimos-1
11) http://earth.esa.int/gscb/ltdp/presentations/17.ltdp_approach_deimos.pdf
12) "Deimos-1 Satellite: Capabilities and Uses," Barcelona, 18.04.2008, URL: [web source no longer available]
13) Ismael López, Alberto J. Fernández, "Deimos-1: A Fully Commercial Earth Observation Mission," June 20, 2007, URL: http://earth.esa.int/gscb/papers/18_Lopez.pdf
14) Owen Hawkins, "UK-DMC 2 and Deimos-1, New DMC Sensors for Agricultural Monitoring," URL: http://mars.jrc.ec.europa.eu/mars/content/download/1641/8961/file/P2-3_Hawkins_UK-DMC2_Deimos1_DMC2_UK.pdf
15) Alberto J. Fernnandez, "Deimos-1: A Fully Commercial EO MissionCommercial Mission," GSCB (Ground Segment Coordination Body), ESA/ESRIN, Frascaty, Italy, June 18-19, 2009, URL: http://www.congrex.nl/08c33/papers/4.2_Fernandez.pdf
16) Martin Unwin, R. de Vos van Steenwijk, S. Duncan, "GPS / GNSS Receivers and Applications for Small Satellites in Low and High Earth Orbit," Proceedings of the 32nd AAS Guidance and Control Conference, Breckenridge, CO, USA, Jan. 31.- Feb. 4, 2009, AAS 09-0707
17) "Small Satellite Reaction Wheel - Microwheel 10SP-M," URL: [web source no longer available]>
18) "SGR-07 Space GPS Receiver," URL: [web source no longer available]
19) "Delta Blues Irrawaddy Delta, Myanmar ," UrtheCast Gallery, Oct. 6, 2016, URL: http://gallery.urthecast.com/delta-blues
20) http://www.deimos-imaging.com/portfolio_category/deimos-1
21) Theras Wood, "UrtheCast welcomes two Earth Observation satellites to its mission," UrtheCast, July 15, 2015, URL: http://blog.urthecast.com/updates/urthecasts-new-satellites-provide-big-data/
22) "UrtheCast Closes Acquisition of Earth Observation Satellites and Business Operations from Elecnor," UrtheCast Press Release, July 15, 2015, URL: http://investors.urthecast.com/file.aspx?IID=4388192&FID=30295993
23) http://www.deimos-imaging.com/deimos-1-gallery
24) http://www.deimos-imaging.com/deimos-1-gallery
25) Jorge Gil, Mónica Díez, Alfredo Romo, Cristina Moclán, Fabrizio Pirondini, "Deimos-1 Cross-calibration with Landsat-7 & Landsat-8," Proceedings of JACIE 2014 (Joint Agency Commercial Imagery Evaluation) Workshop, Louisville, Kentucky, March 26-28, 2014, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/14.020_Jorge-Gil_D1-XCal-L7_L8-JACIE-2014.pdf
26) http://www.deimos-imaging.com/deimos-1-gallery
27) http://www.deimos-imaging.com/deimos-1-gallery
28) Jorge Gil, Fabrizio Pirondini, Mónica Díez, Alfredo Romo, Cristina Moclán, "Deimos-1 - Image improvement via MTF deconvolution," 12th Annual JACIE (Joint Agency Commercial Imagery Evaluation) Workshop , St. Louis, MO, USA, April 16-18, 2013, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/Deimos-1-MTF-JACIE-2013-v2.0.pdf
29) Miguel Belló Mora, "Elecnor Deimos Imaging," 4th Symposium on Earth Observation Business, Paris, France, Sept. 12-14, 2012, URL: http://www.satellite-business.com/program/sympo-eo/thursday
30) Drew Hopwood, "Continued Monitoring of US Crop Condition Using Deimos-1 & UK-DMC2," 12th Annual JACIE (Joint Agency Commercial Imagery Evaluation) Workshop , St. Louis, MO, USA, April 16-18, 2013, URL: https://calval.cr.usgs.gov/wordpress/wp-content/uploads/Astrium-US-Crop-Collection.pdf
31) D. Lozano Garcia, "DEIMOS Optical missions," 3rd GSCB (Ground Segment Coordination Body) Workshop, 2012, ESA/ESRIN, Frascati, Italy, June 6-7, 2012, URL: http://earth.esa.int/gscb/papers/2012/20-Deimos_Optical_Missions.pdf
32) "Fire in Arizona (June 4, 2011)," URL: http://www.deimos-imaging.com/news-1/fire-in-arizona-june-4-2011
33) Fabrizio Pirondini, Alfredo Romo, Cristina Moclan, Jorge Gil, MónicaDíez, "Deimos-1 Absolute Calibration and Data Validation," 10th Annual JACIE ( Joint Agency Commercial Imagery Evaluation) Workshop, March 29-31, 2011, Boulder CO, USA, URL: http://calval.cr.usgs.gov/JACIE_files/JACIE11/Presentations/WedAM/1115_Pirondini_JACIE_11.107.pdf
34) Alex da Silva Curiel, Andrew Cawthorne, Andy Bradford, James Penson, Shaun Kenyon, Liam Sills, Martin Sweeting, "The SSTL-X50 TrueColour - a New Earth Observation Mission for Application-driven Imaging," Proceedings of the 4S (Small Satellites Systems and Services) Symposium, Port Petro, Majorca Island, Spain, May 26-30, 2014
35) James Penson, Zeger de Groot, L. Sills, R. Taylor, Paul Stephens, Martin Sweeting, "In Orbit Results of the Next Generation Disaster Monitoring Constellation Satellite UK-DMC-2, Proceedings of the 61st IAC (International Astronautical Congress), Prague, Czech Republic, Sept. 27-Oct. 1, 2010, IAC-10.B1.5.2
36) Mike A. Cutter, Luis Gomes, Alex da Silva Curiel, Philip E. Davies, Zeger de Groot, Liam R. Sills, Andrew Cawthrorne, Martin N. Sweeting, "A New Generation of Disaster Monitoring Constellation Imagers," Proceedings of IAC 2011 (62nd International Astronautical Congress), Cape Town, South Africa, Oct. 3-7, 2011, paper: IAC-11.B1.3.2
Overview Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top