LAPAN-A2 microsatellite of Indonesia
EO
Operational (nominal)
LAPAN
The LAPAN-A2 Earth observation microsatellite is the first indigenous satellite design and development of Jakarta’s National Institute of Aeronautics and Space LAPAN (Lembaga Penerbangan dan Antariksa Nasional), funded by the government of Indonesia. Launched in September 2015 and still operational, as a follow-on mission to LAPAN-TUBSAT, LAPAN-A2 aims to monitor the environment, disaster mitigation, land use and natural resources.
Quick facts
Overview
| Mission type | EO |
| Agency | LAPAN |
| Mission status | Operational (nominal) |
| Launch date | 28 Sep 2015 |
| CEOS EO Handbook | See LAPAN-A2 microsatellite of Indonesia summary |
Summary
Mission Capabilities
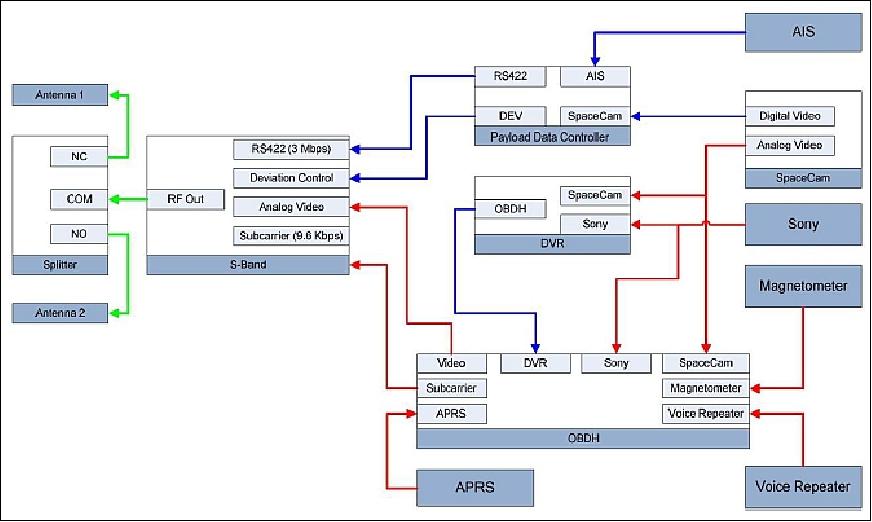
LAPAN-A2 is equipped with a Video Camera assembly, whose COTS (Commercial-of-the-Shelf) RGB medium format video camera is used for snapshot operations support. The video camera assembly consists of two cameras, featuring analog and digital outputs respectively, with applications in Earth surveillance.
The AIS (Automatic Identification System) can monitor ships, based on GPS and VHF digital communication. The highly sensitive AIS instrument features simultaneous reception and decoding of any two channels in the maritime VHF band, as well as a software-defined radio architecture.
The APRS (Automatic Packet Reporting System) is an amateur radio and an amateur radio voice repeater. The system is intended for ORARI (Indonesian Amateur Radio Organization) use in case of natural disasters such as earthquakes, tsunamis, eruption of volcanoes and floods, providing a satellite based telecommunication system in support of disaster mitigation and relief efforts.
Performance Specifications
The COTS camera has a focal length of 0.6 m and uses a CMOS (Complementary Metal-Oxide Semiconductor) image sensor that can perform progressive scans of the Earth. It has a 50% quantum efficiency with lens on chip and a spatial resolution of 6 m, with a frame coverage of 12 km x 12 km. The agility of the spacecraft and the high tolerance on illumination variation of the camera increase the prospect of improved observations.
LAPAN-A2 maintains a circular near-equatorial orbit at an altitude of 650 km, an inclination of 8° and a period of 98 minutes.
Space and Hardware Components
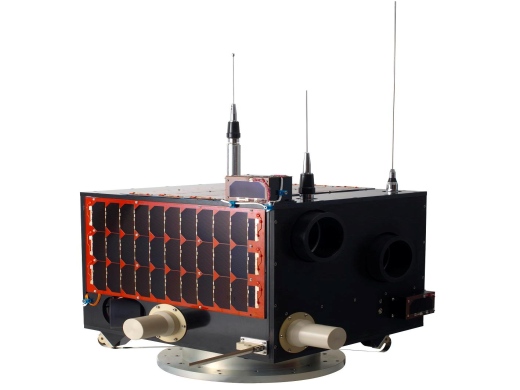
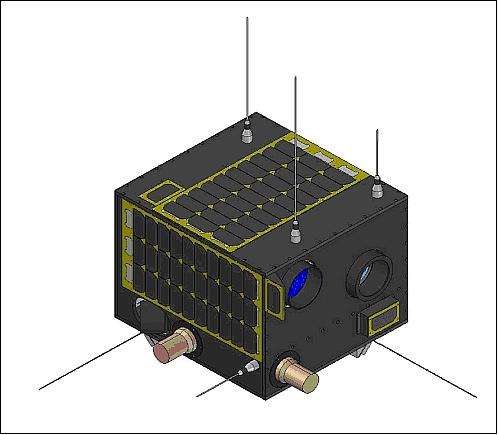
The spacecraft employs the bus structure of LAPAN-TUBSAT, with a launch mass of 74 kg and dimensions 0.36 m x 0.47 m x 0.50 m.
The LAPAN-A2 microsatellite uses a GPS receiver for the provision of timing information for all subsystems and orbit position, as well as an enhanced ADCS (Attitude Determination and Control Subsystem) to obtain precise satellite platform attitude stability during Earth observation data acquisition.
The ADCS actuators consist of three pairs of Reaction Wheels, laser gyros and three magnetic coils (torquers). The star sensors (one with a CMOS detector and one with a CCD detector) are mounted in orthogonal directions to ensure star visibility at all times. The spacecraft is also equipped with a three-axis magnetometer to measure the Earth's magnetic field.
Within the EPS (Electrical Power Subsystem), power is generated via four solar panels and stored in three Lithium-ion batteries.
LAPAN operates a network of ground stations to manage its microsatellites.
LAPAN-A2 microsatellite of Indonesia
Spacecraft Launch Mission Status Sensor Complement Ground Segment References
The LAPAN-A2 microsatellite, a successor mission of the LAPAN-TUBSAT (also referred to as LAPAN-A1) microsatellite family, is the first indigenous satellite design and development of LAPAN (Lembaga Penerbangan dan Antariksa Nasional), or the "National Institute of Aeronautics and Space," Jakarta, funded by the government of Indonesia. 1) 2) 3)
Background: Indonesia is an island nation located in the Indian Ocean with a length of ~ 5,150 km along the equator (equivalent to about 1/8th of Earth's circumference), the widest breadth of the archipelago is ~1,750 km . The country has a population of more than 220 million people. With the extensive region and with diverse geographical problems, the utilization of satellites is important for Indonesia to address solutions to the problems of the nation.
LAPAN was established in November 1964. The space agency is responsible for carrying out civil and military aerospace research and space research; however, one of the most important tasks of the LAPAN is to interconnect the more than 6000 islands of Indonesia. For this reason, LAPAN has launched several satellites (purchased abroad) to provide telecommunication coverage for the islands of Indonesia. The LAPAN communication satellites include the Palapa satellites (launch of Palapa-A1 on Aug. 7, 1976, and Palapa-A2 on Oct. 3, 1977).
Following the success of LAPAN-TUBSAT (A1) microsatellite, built at TUB (Technical University of Berlin) along with a training program of LAPAN engineers - which was launched on January 10, 2007 and is operational in 2012 - LAPAN engineers designed and developed the LAPAN-A2 spacecraft indigenously, and started also with the design of the LAPAN-A3 satellite, all are based on the LAPAN-TUBSAT bus.
The mission objectives of LAPAN-A2 (considered to be a 2nd generation mission) are to use the microsatellite for disaster mitigation monitoring by Earth observation, also for land use, natural resources and environment monitoring.
Specific goals of the LAPAN-A2 mission are: 4) 5) 6) 7) 8)
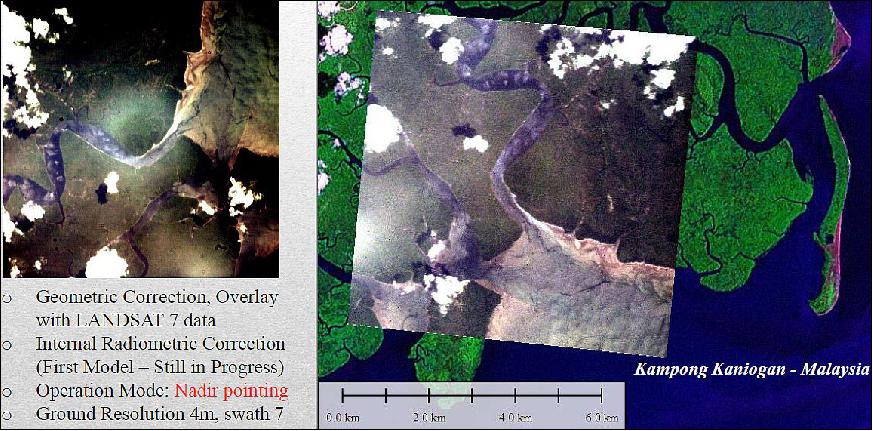
1) Provision of an Earth observation video surveillance capability, based on the LAPAN-TUBSAT experience with a swath width of3.5 km and a resolution of 5 m. - The experimental Digital Space Camera provides a swath width of 9 km with a resolution of 4 m.
2) Use of amateur radio APRS (Automatic Packet Reporting System) and voice repeater functions for disaster mitigation communications. This service is implemented for ORARI (Organisasi Amatir Radio Indonesia - or the 'Amateur Radio Organization of Indonesia').
3) Implementation of an AIS (Automatic Identification System) payload for the provision of maritime monitoring in the equatorial region
4) Use of an automatic attitude control subsystem.
Development of indigenous facilities: In view of a very sparse high-tech infrastructure in Indonesia, LAPAN built several facilities in Indonesia to design and develop its microsatellites. This involved the construction of an AIT (Assembly, Integration and Test) facility for LAPAN-A2. One of the critical facilities for satellite AIT is the structural dynamics (vibration) laboratory. In 2009, LAPAN upgraded the vibration laboratory at Sentra Teknologi Polimer, BPPT, in Tangerang. The laboratory was initially used to test automotive components. The upgrade has made it possible to measure natural frequencies and to provide dynamic loads for spacecraft up to the 100 kg class , as required by the launch provider.
Spacecraft
The LAPAN A-2 microsatellite features the following performance enhancements when compared with LAPAN-TUBSAT:
• Use of a GPS receiver for the provision of timing information for all subsystems and orbit position (e.g., geodetic coordinates), primarily for periodic calculation of satellite orbit elements.
• Use of an enhanced ADCS (Attitude Determination and Control Subsystem) to obtain precise satellite platform attitude stability during Earth observation data acquisition.
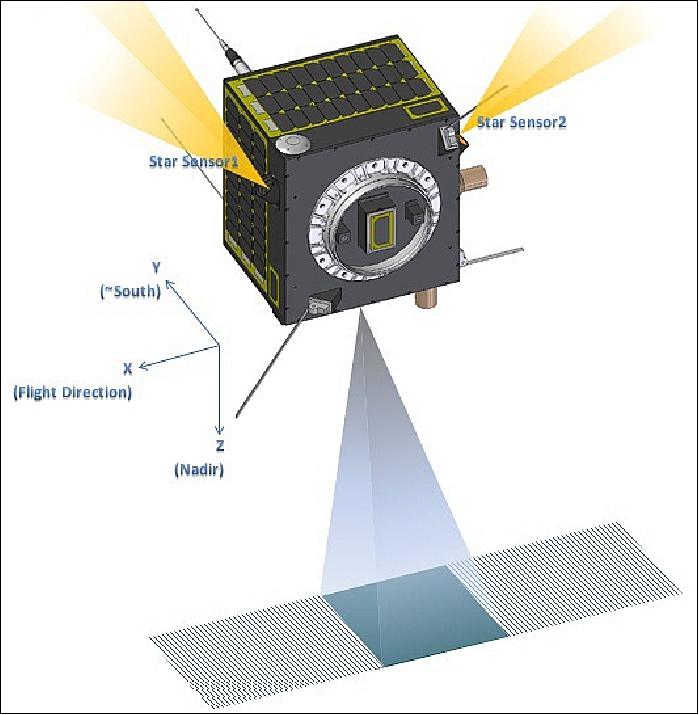
The attitude control strategy of LAPAN-A2 is based on the angular momentum management concept of LAPAN-TUBSAT heritage. This concept implements the momentum bias method in which the angular momentum is maintained in the Y-axis. The Y-axis is defined as the pitch axis which is perpendicular to the flight direction. 9)
The ADCS actuators consist of 3 pairs of RWs (Reaction Wheels), laser gyros and 3 magnetic coils (torquers). These torquers use air coils to generate magnetic dipole moments. They can compensate for the spacecraft residual magnetic fields or attitude drift from minor disturbance torques. - The attitude is sensed with 6 sun sensors for coarse attitude determination, a redundant set of star sensors is used for precision pointing during imaging periods. The star sensors (one with a CMOS detector and one with a CCD detector) are mounted in orthogonal directions to ensure star visibility at all times. The spacecraft is also equipped with a 3-axis magnetometer to measure the Earth's magnetic field.
Star sensor assembly | CCD sensor | - FOV: 31º x 23º |
CMOS sensor | - FOV: 14º x 14º | |
Gyroscope | Bias stability | ≤ 2º/h (at stabilzed temperature) |
Magnetometer | Wide field range | 0.6 gauss (mTesla) |
Reaction wheel assembly | Moment of inertia | 912.6 kgmm2 |
Magnetic torquer | Dipole | 11 Am2 @16V (x-axis) |
According to mission operations, the attitude control of LAPAN-A2 can be divided into 3 main categories where the satellite axis of roll pitch and yaw is defined as X, Y, Z respectively:
- Nadir pointing, in which the Z-axis of spacecraft is pointed to nadir along the ground track. The spacecraft also has slew capability to point at a certain object on the Earth off-track
- Target pointing, in which the pitch rate is managed so that the Z- axis is pointed to the designated target on Earth. This target pointing mode is applicable for recording moving objects in the target area or to produce stereographic images.
- Inertial pointing, in which the satellite points the camera to the certain celestial target in space.
The ADCS will support automatic capturing of an Earth target. In this operational support mode, the camera operation and satellite pointing maneuver employ a closed-loop process between the star sensors, the GPS receiver, and the attitude control actuator assembly, which are managed by the satellite main computer and the attitude control computer (called Wheel Drive Electronics). The agile spacecraft provides a pointing capability (±30º in pitch and roll) to point it for event observations.
EPS (Electrical Power Subsystem): Use of triple junction surface-mounted solar cells for the generation of power. The 4 GaAs solar panels, each of size 465 mm x 262 mm with 30 solar cells, provide a maximum power of 32 W. Three Li-ion batteries are arranged in parallel, each consisting of 4 cells per pack in series. The battery assembly provides a nominal voltage of 17 V with a storage capacity of 17 Ah.
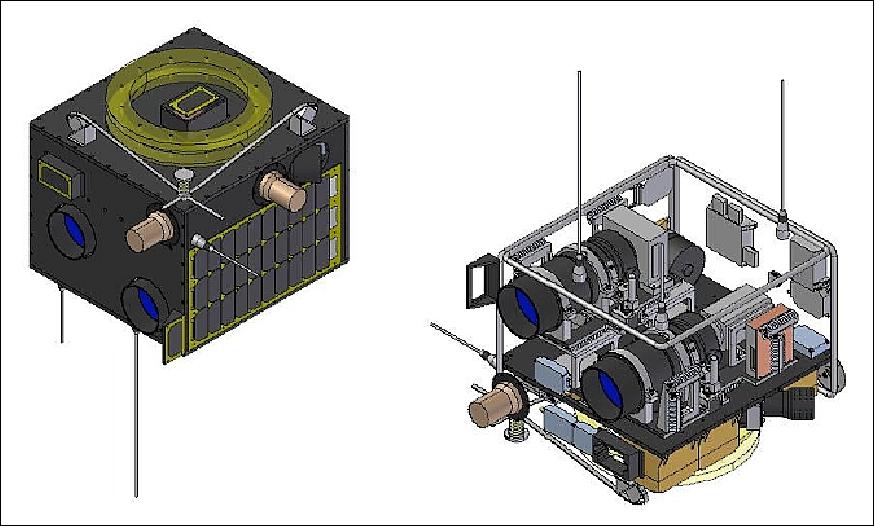
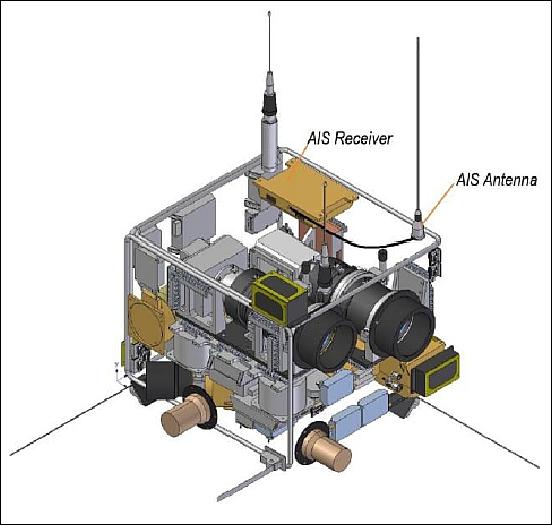
Spacecraft structure: The configuration of the bus structure is the same as that of LAPAN-TUBSAT. The box-like structure has a size of 47 cm in length (x-axis) and 50 cm in width (z-axis). Two shelves (upper and lower compartment) provide accommodation for all spacecraft components. The height of the upper compartment (based on its placement in launch vehicle) is the height of the lens and its mounting platform. This compartment is utilized to accommodated the ‘tall' components, such as batteries. The lower compartments is used to mount the ‘short' components such as the electronics. The total height of the structure is 36 cm, which left the dimension for the AIS VHF antenna not exceeding the PSLV height envelope. The spacecraft launch mass is 74 kg.
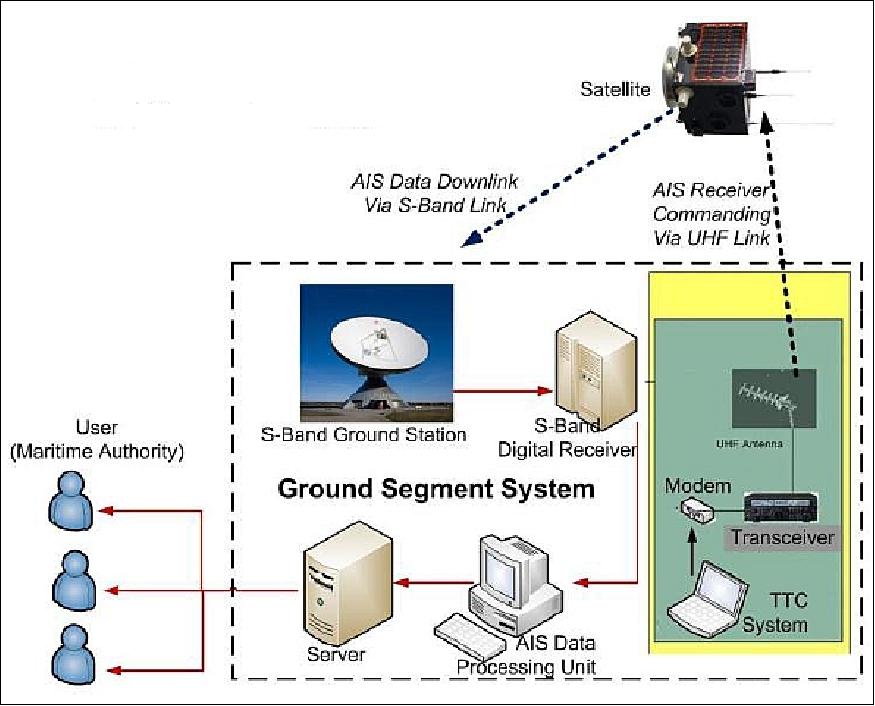
RF communications: The uplink and downlink TT&C (Telemetry Tracking and Command) functions are implemented in the UHF band at a data rate of 1200 bit/s. The payload video data is downlinked in S-band at 5 Mbit/s.
Launch
LAPAN-A2 was launched on Sept. 28, 2015 (04:30:00 UTC) as a secondary payload to the AstroSat spacecraft of ISRO (primary payload)on the PSLV-C30 vehicle of ISRO. The launch site was SDSC (Satish Dhawan Space Center) SHAR, ISRO's launch site on the south-east coast of India, Sriharikota. 10)
AstroSat was successfully placed into orbit and separated from the fourth stage of PSLV-C30. The separation of all the six co-passenger satellites was completed in the subsequent three minutes. The seven satellites carried by PSLV-C30 had a total mass of 1631 kg at lift-off.
Orbit: Circular NEqO (Near Equatorial Orbit), altitude =650 km, inclination of 8º, period = 98 minutes. The low inclination permits a contact with the spacecraft on every pass of the mission.
Secondary payloads on this flight are
• LAPAN-A2, a microsatellite (68 kg) of LAPAN, Indonesia
• ExactView-9 (EV9), a nanosatellite (5.5 kg) of exactEarth Inc., Canada. EV9 incorporates a next generation AIS (Automatic Identification System) receiver.
• Four Lemur nanosatellites (Lemur-2 through Lemur-5, 3U CubeSats, 4 kg each) of Spire Global, Inc. (formerly NanoSatisfi Inc.) of San Francisco, CA.
Mission Status
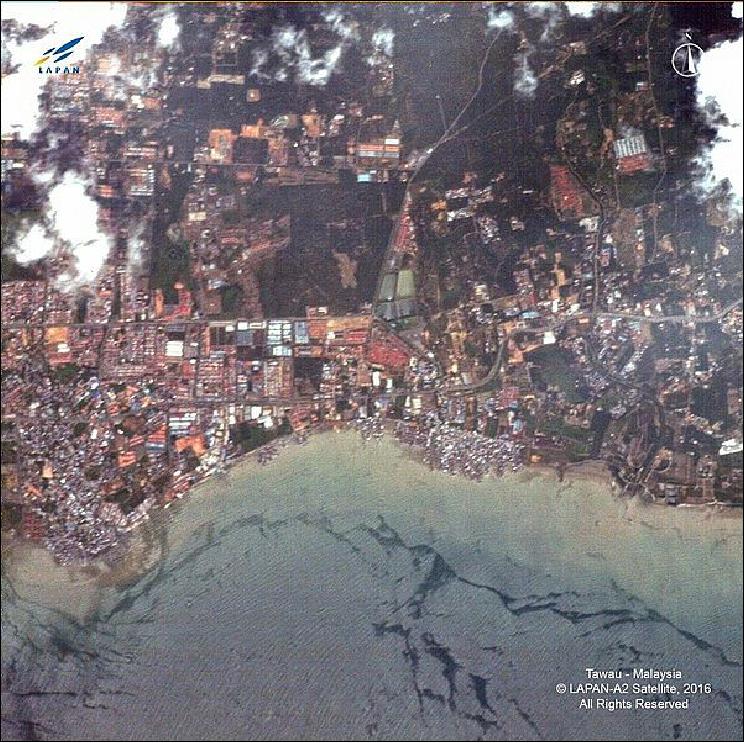
• The LAPAN-A2 spacecraft and its payload are fully operational in February 2016. The mission has been very productive in acquiring imagery, mostly over Indonesia (Ref. 11).
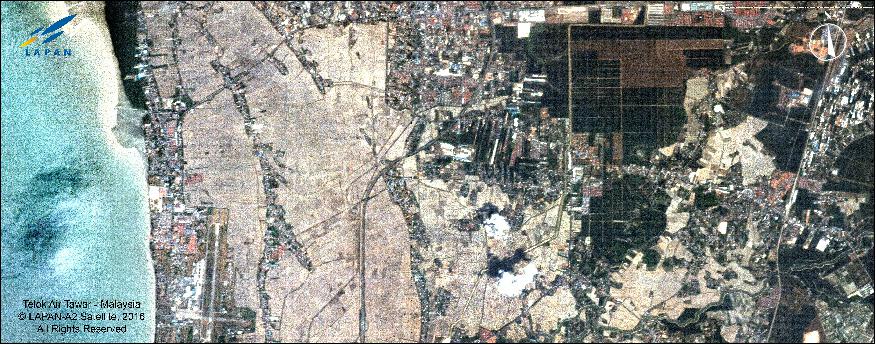

• March 2016: LAPAN provided the images of Figures 8 and 9. 11)

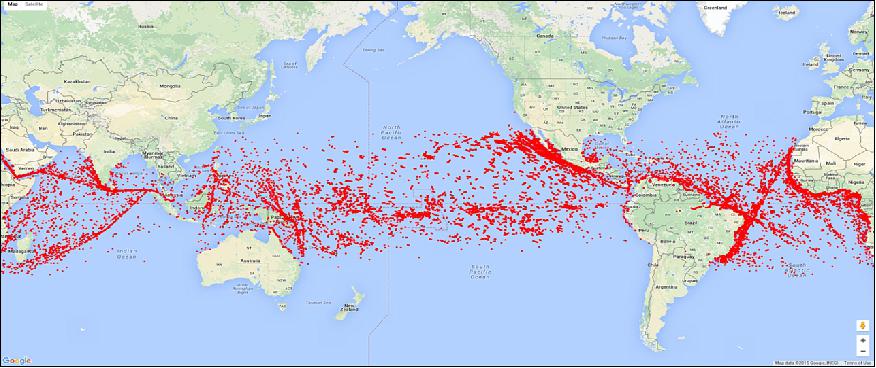
• Dec. 2015: Shipping monitoring activities are being carried out on a daily basis in the near-equatorial region. The satellite is sending the AIS data to the LAPAN ground stations 14 times/day with a gap of 1.7 hours. Around 2.4 million messages were collected in 24 hours. 12)
Sensor Complement
Video Camera Assembly
Use of a COTS (Commercial-of-the-Shelf) RGB video camera, named spaceCam c4000, provided by Theta System Elektronik GmbH of Gröbenzell, Germany. The medium format RGB camera features a focal length of 600 mm. The camera is used for snapshot operations support. At an orbital altitude of 650 km, the camera provides a spatial resolution of 6 m with a frame coverage of 12 km x 12 km. The agility of the spacecraft (i.e. the ability to point off-nadir) and the high tolerance on illumination variation of the camera increase the prospect of improved observations.
The video camera assembly consists of two cameras. The first one is the same model as flown on LAPAN-TUBSAT (with an analog output); the second camera features a digital output.

The camera system offers two observation modes: a) automatic target pointing, and b) interactive operation.
• The automatic target pointing mode employs the closed-loop process between the star sensor assembly, the GPS receiver, and the attitude control actuator.
• The interactive operation mode is identical to the one on LAPAN-TUBSAT, in which the video camera mode will be used to find the target, before high-resolution imagery is taken.
In the early orbit phase the satellite will be operated in open-loop or interactive mode for instrument characterization. After the characterization process is completed ,the satellite will be flown in closed-loop or automatic target pointing as the nominal support mode.
CMOS (Complementary Metal-Oxide Semiconductor) image sensor | CMOSIS 4000 model |
Sensor type | Progressive scan, CMOS, global shutter |
Sensor format | 1:1, 1 inch (25 mm) CMOS image sensor |
Image size | 11.3 mm x 11.3 mm, 15.9 mm diagonal |
Pixel size | 5.5 µm x 5.5 µm |
No of pixels | 2048 (H) x 2048 (V) |
Electron Capacity, FWC (Full Well Capacity) | 13,500 e- |
Noise figure | 13 e- rms |
Dynamic range | 1038 : 1 |
Dark Current @ 25ºC | 10 e- / pixel / s |
Quantum efficiency | 50 %, with lens on chip |
Anti-blooming | 200 x e- capacity |
Data quantization | 12 bit |
Mechanical size | 126 mm x 106 mm x 54mm |
Operational temperature range | -15º to 45ºC |
AIS (Automatic Identification System)
Indonesia is the largest archipelago in the world. Its territorial water is about 5.8 million km2 which represents 75% of its territory. Hundreds of ships pass daily through two of the most frequented waterways in Indonesia, the Malaka (Malacca) strait and the Sulawesi strait. In 2012, the monitoring of maritime traffic is still conduced by the conventional coastal stations and the use of patrol boats. The range of a coastal station is typically 30 nautical miles (56 km) and about the same for patrol boats. Hence, the coverage for Indonesian waters is still very limited. An improvement of the situation is indeed needed to reduce the level of law violations in Indonesian waters.
The use of a satellite-based maritime monitoring system is considered the proper solution for Indonesia. AIS (Automatic Identification System) is a system that can monitor ships, based on GPS and VHF digital communication. AIS is regulated by the IMO (International Maritime Organization) to be installed in ships weighing 300 tons or more. An AIS receiver on the satellite offers a considerably enlarged coverage when compared to a seashore station network.
The AIS instrument assembly is designed and developed at KSX (Kongsberg Seatex AS, Trondheim, Norway). The instrumentation is similar to the one flown on AISSAT-1 (launch on July 12, 2010). The AIS instrument features are (Ref. 3) :
• Simultaneous reception and decoding of any two channels in the maritime VHF band
• SDR‐based radio architecture – upgradeable after launch
• High sensitivity
• Low power consumption
• Industrial grade components used giving a cost‐efficient AIS payload
• RS422 interface.
APRS (Automatic Packet Reporting System)
APRS is an amateur radio as well as an amateur radio voice repeater. The system is intended for ORARI ( Indonesian Amateur Radio Organization) use.
The archipelago of Indonesia is part of the global "ring of fire" experiencing frequent natural disasters such as earthquakes, tsunamis, eruption of volcanoes, and floods. From past experience, the ground communication infrastructure is often damaged, limiting the ability to coordinate the aid effort in the stricken region. A satellite based telecommunication system is usually the only means of communication. The LAPAN-A2 microsatellite carries the amateur radio short text message repeater (APRS) and a voice repeater. The APRS (Automatic Packet Reporting System ) and the voice communication payload is developed by LAPAN using the LAPAN-TUBSAT UHF/VHF radio heritage along with a COTS APRS modem. The primary application of APRS is intended for communications in support of disaster mitigation and relief efforts.
Ground Segment
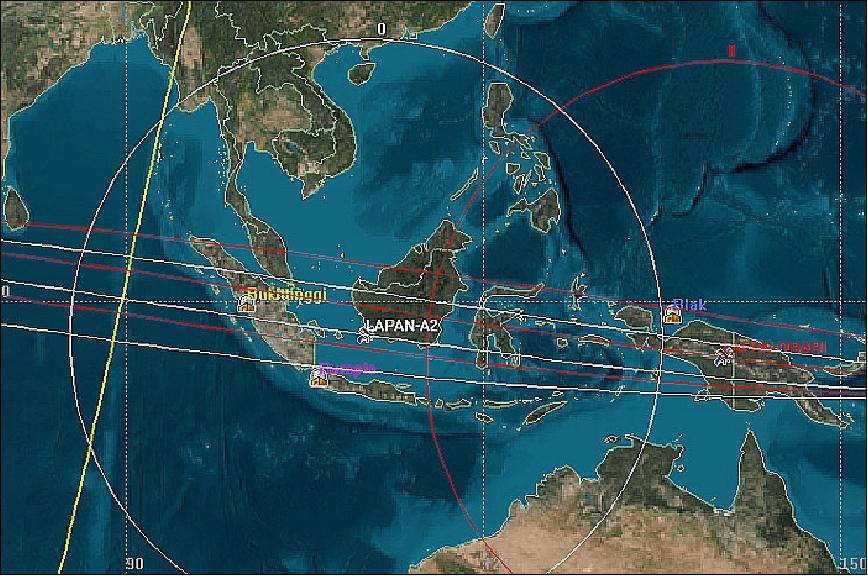
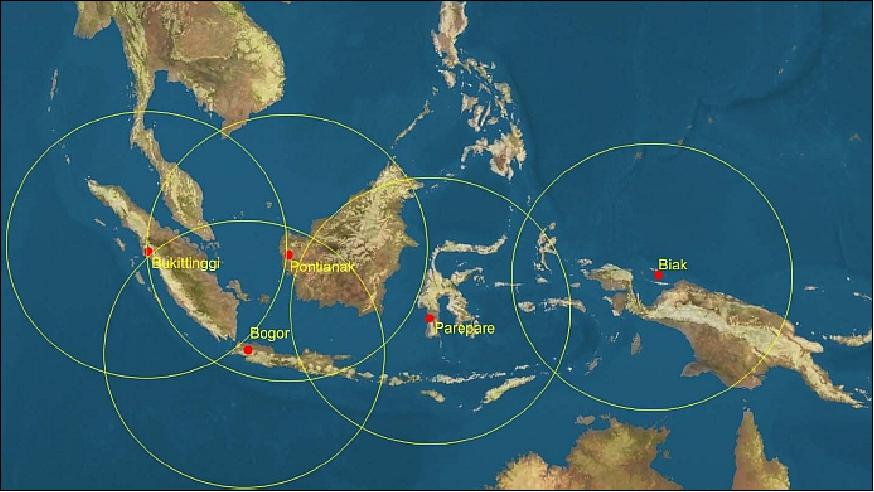
LAPAN operates a network of ground stations to operate microsatellites (LAPAN-TUBSAT, LAPAN-A2 and LAPAN-A3). The network consists of ground station in Rumpin and Rancabungur (Bogor), Bukittinggi (West Sumatra), Pontianak (West Borneo)and Biak (Papua). Within the network, Rumpin is the main control station. In addition, as a research ground station, Rancabungur functions as backup for Rumpin, to ensure the reliability of Western Indonesia coverage. A LAPAN-built receiving antenna is installed in Bukittinggi, to cover the far Northwest of Indonesia such as the Aceh province. Another LAPAN-built receiving antenna is installed in Pontianak and Biak, to cover the satellite operation in the Central and Eastern part of Indonesia. In the future, another station will be established in Parepare, Celebes, to provide a better coverage of the central part of Indonesia.
References
1) Soewarto Hardhienata, Robertus Heru Triharjanto, Mohamad Mukhayadi, "LAPAN-A2 : Indonesian Near-Equatorial Surveillance Satellite," APRSAF-18 (Asia-Pacific Regional Space Agency Forum) Singapore, December 6-9, 2011, URL: http://detekgan.lapan.go.id/index.php?
option=com_phocadownload&view=category&download=26%3Alapan-a2-aprsaf&
id=6%3Acatpublikasi&Itemid=215&lang=en
2) Robertus Heru Triharjanto, "Development of Micro-satellite Technology at the Indonesian National Institute of Aeronautics and Space (LAPAN)," The 17th CEReS (Center for Environmental Remote Sensing) International Symposium, Chiba University, Chiba, Japan, March 1, 2012
3) "LAPAN‐A2 Equatorial Mission for Indonesian Maritime Surveillance," APRSAF‐19, 10 – 14 December 2012, Kuala Lumpur, Malaysia
4) "Indonesia's Equatorial Orbit Twin Satellites for Space-based Safety Application in the Disaster Mitigation and Relief Effort," APRSAF-16 (Asia Pacific Regional Space Agency Forum), Bangkok, Thailand, January 26 – 29, 2010, URL: http://www.aprsaf.org/data/aprsaf16_data/D3-1130_AP16_CR_LAPAN.pdf
5) Information was provided by Wahyudi Hasbi and by Robertus Heru Triharjanto, both of LAPAN, Jakarta.
6) Toto Marnanto Kadri, "LAPAN Satellite Development and Their Operation," APRSAF-17 (Asia Pacific Regional Space Agency Forum), Melbourne, Australia, Nov. 23-26, 2010, URL:
http://www.aprsaf.org/data/aprsaf17_data/Day2-csa_1200_T_Marnanto_Kadri.pdf
7) Bambang S. Tejasukmana, "Indonesia Country Report Space Based Observation for Disaster Risk Reduction," Proceedings of APRSAF-18 (18th Session of the Asia-Pacific Regional Space Agency Forum), Singapore, Dec. 6-9, 2011, URL:
http://www.aprsaf.org/annual_meetings/aprsaf18
/pdf/program/day3/7_Indonesia%20Country%20Report%20APRSAF-18%208des%202011.pdf
8) Ery Fitrianingsih, "Indonesian Capacity Building in Space Technology," Proceedings of the UN/Japan Workshop and The 4th Nanosatellite Symposium (NSS), Nagoya, Japan, Oct. 10-13, 2012
9) M. Arif Saifudin, Mohammad Mukhayadi, "LAPAN-A2 Attitude Control Strategy for Equatorial Surveillance Mission," Proceedings of the 9th IAA Symposium on Small Satellites for Earth Observation, Berlin, Germany, April 8-12, 2013, paper: IAA-B9-1202, URL of presentation:
http://media.dlr.de:8080/erez4/erez?cmd=get&src=os/IAA/archive9/Presentations/IAA-B9-1202.pdf
10) "PSLV Successfully Launches India's Multi Wavelength Space Observatory ASTROSAT," ISRO, Sept. 28, 2015, URL:
http://www.isro.gov.in/update/28-sep-2015
/pslv-successfully-launches-india%E2%80%99s-multi-wavelength-space-observatory-astrosat
11) Information provided by Robertus Heru Triharjanto of LAPAN.
12) Rika Andiarti, "Space Activities in Indonesia," APRSAF-22 (Asia-Pacific Regional Space Agency Forum), Bali, Indonesia, December 1-4, 2015, URL:
http://www.aprsaf.org/annual_meetings
/aprsaf22/pdf/program/plenary/D3_1200_Indonesia_Country_Report-REV.pdf
13) http://www.theta-aerospace.com/download.php?file=5315bf9c3f22f48ef2d77a1b7d17b60a
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: "Observation of the Earth and Its Environment: Survey of Missions and Sensors" (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates (eoportal@symbios.space).
Spacecraft Launch Mission Status Sensor Complement Ground Segment References Back to top