EO
NASA
Mission complete
Imaging multi-spectral radiometers (vis/IR)
SeaSat was a pioneering Earth observation experimental mission of NASA’s Jet Propulsion Laboratory (JPL). Despite its short 110-day life in 1978, SeaSat demonstrated the viability of imaging radar for studying our planet and laid the foundations of satellite oceanography, becoming a precursor to many subsequent missions that investigated the Earth's oceans, land and ice.
Quick facts
Overview
| Mission type | EO |
| Agency | NASA |
| Mission status | Mission complete |
| Launch date | 26 Jun 1978 |
| End of life date | 08 Oct 1978 |
| Measurement domain | Snow & Ice |
| Measurement category | Sea ice cover, edge and thickness |
| Measurement detailed | Sea-ice cover, Sea-ice type, Glacier cover, Sea-ice surface temperature, Sea-ice Concentration |
| Instruments | SMMR, L-band SAR, LRR (SeaSat), ALT (SeaSat), SASS, SMEI, VIRR (SeaSat) |
| Instrument type | Imaging multi-spectral radiometers (vis/IR), Scatterometers, Precision orbit, Imaging multi-spectral radiometers (passive microwave), Radar altimeters |
Related Resources

Summary
Mission Capabilities
SeaSat was equipped with a Synthetic Aperture Radar (SAR), a Scanning Multichannel Microwave Radiometer (SMMR), a Radar Altimeter (ALT), the Seasat-A Scatterometer System (SASS), a Visible and Infrared Radiometer (VIRR) and a Laser Retro-Reflector (LRR). All sensors operated simultaneously, over the same region of the ocean.
The SAR sensor is regarded as the first imaging SAR system used in Earth orbit. It employed a phased array antenna, consisting of eight identical rigid fibreglass honeycomb panels. SMMR was a multispectral, dual-polarisation microwave radiometer, observing at five different wavelengths, with the goal of monitoring sea surface temperatures, wind speeds, rain rate, atmospheric water content and ice conditions. The ALT instrument was a Ku-band compressed pulse radar altimeter, utilising a parabolic 1 m antenna pointed off nadir and a linear FM (Frequency Modulation) transmitter to determine sea surface profiles, currents, wind speeds and wave heights. As a proof-of-concept experiment, SASS was a fan-beam dual-polarised Doppler scatterometer, with the objective of radar backscatter measurements over ocean surfaces for estimation of the wind field. VIRR was based on a Cassegrain-type telescope as a support instrument, capturing the visual reflection and thermal infrared emission from oceanic, coastal and atmospheric features, with the potential to aid in the interpretation of the data gathered from the other sensors. LRR supported precision orbit determination for the spacecraft.
Performance Specifications
SAR operated in the L-band at a centre wavelength of 0.235 m, with a radiometric resolution of 5 bits of raw data and a spatial resolution of 25 m on the surface at four looks. The instrument featured HH polarisation (horizontal transmit and horizontal receive) at a look angle of 20°. It had a swath width of 100 km.
SMMR operated at five different frequencies: 6.6 GHz, 10.7 GHz, 18.0 GHz, 21.0 GHz and 37.0 GHz. It had a swath width of approximately 600 km, while the spatial resolution ranged from 22 km at 37 GHz to 100 km at 6.6 GHz. The instrument’s antenna was a parabolic reflector, offset from the nadir by 42°. The absolute accuracy in determining the sea surface temperature was 2 K, while the accuracy of the wind speed measurements was 2 m/s for winds ranging from 7 m/s to about 50 m/s.
The ALT Experiment determined the satellite’s position above the ocean surface with an accuracy of 0.1 m and it evaluated the backscatter coefficient with an accuracy of 1.0 dB. Moreover, ALT measured the height of the waves below the satellite with an accuracy of 10% or 0.5 m, whichever was greater. The altimeter operated at 13.56 GHz and had a swath width which varied from 2.4 to 12 km, depending on the state of the sea.
SASS had a pulse transmit frequency of 14.599 GHz and 500 km swaths on either side of the satellite. The high wind swaths added an additional 250 km to each side. The spatial resolution was 50 km over a region of 200 to 700 km on either side of the spacecraft.
VIRR operated in the visible (wavelengths 0.49 µm - 0.94 µm) and infrared (10.5 µm - 12.5 µm) regimes, with a nadir angular resolution of 2.3 km and 4.4 km, respectively. It had a 2280 km wide, nadir-centred swath.
SeaSat maintained a non-sun-synchronous near-circular polar orbit, at an inclination of 108°, with the apogee at 799 km and the perigee at 775 km. It had a period of 101 minutes, with a repeat cycle of 17 days and a subcycle of 3 days.
Space and Hardware Components
SeaSat was carried by an Atlas-Agena launch vehicle, whose upper stage provided the satellite bus functions, including power, telemetry, attitude control, as well as command and control functions. The lower part of the spacecraft consisted of the sensor module, comprising the five instruments aforementioned.The spacecraft was three-axis stabilised using a momentum wheel/horizon sensing system to accurately point the sensors at the Earth's surface.
The Attitude Control Subsystem (ACS) utilised hydrazine reaction control thrusters for attitude control and a gyro reference unit as one attitude reference, augmented by horizon sensors for a short period prior to nose-down.
The Electrical Power Subsystem (EPS) was designed to provide power to the spacecraft subsystems and to the payload using solar arrays and rechargeable batteries.
The SeaSat mission failed in October 1978 because of an abrupt power system failure in the Agena bus.
SeaSat Mission — the world's first satellite mission dedicated to oceanography
Spacecraft Launch Mission Status Sensor Complement Success Statement References
SeaSat (also referred to as SeaSat-A prior to launch and SeaSat-1 after launch) is a pioneering Earth observation experimental mission of NASA/JPL; the first ever civilian spaceborne imaging radar instrument (SAR) was flown on SeaSat in 1978.
During its brief 110-day lifetime (end of the mission due to a malfunction), SeaSat collected more information about the oceans than had been acquired in the previous 100 years of shipboard research. It established satellite oceanography and proved the viability of imaging radar for studying our planet. Most importantly, it spawned many subsequent Earth remote sensing satellites and instruments at JPL and elsewhere that track changes in Earth's oceans, land and ice. Its advances were also subsequently applied to missions to other planets.
The SeaSat program had three main objectives:
1) to demonstrate techniques to monitor Earth's oceanographic phenomena and features from space on a global scale
2) to provide timely oceanographic data to scientists studying marine phenomena, and to users of the oceans as a resource (ocean shippers, fishermen, marine geologists, etc.)
3) to determine the key features of an operational full-time ocean-monitoring system.
The SeaSat mission pioneered satellite oceanography and proved the viability of imaging radar for studying our planet. The SAR instrument provided a wealth of information on such diverse ocean phenomena as surface waves, internal waves, currents, upwelling, shoals, sea ice, wind, and rainfall. SAR did not produce the first global view of ocean circulation. The ALT instrument of SeaSat produced the first global view of the variability of the surface geostrophic currents. Oceanographers had global maps of the mean surface geostrophic currents (commonly called ocean circulation) years before Seasat.
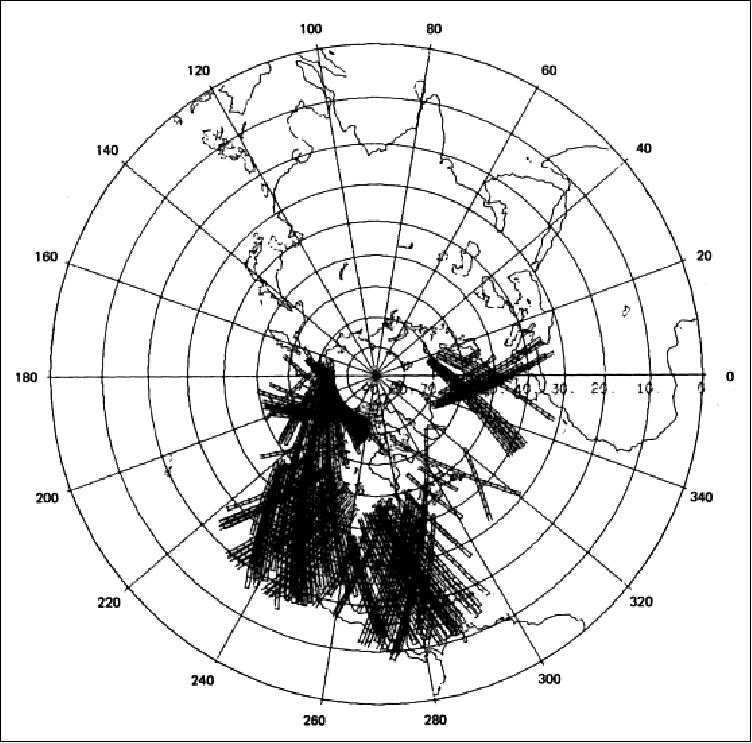
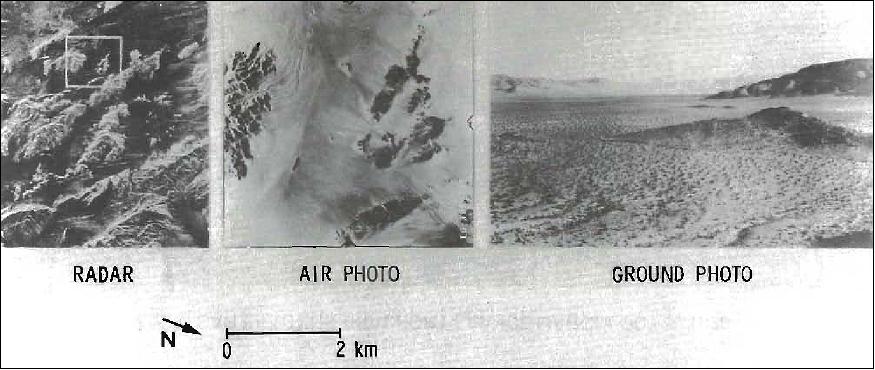
- Beyond the oceans, SeaSat's synthetic aperture radar instrument provided spectacular images of Earth's land surfaces. Even though the satellite was short-lived and the SeaSat program was discontinued, it demonstrated the immense potential of the SAR observation technology, generating great interest in satellite active microwave remote sensing. SeaSat SAR observations amounted to a total area of about 126 x 106 km2 (of the northern hemisphere), including multiple coverages of many regions. 1) 2) 3) 4) 5) 6) 7)
Overview
NASA began planning for the Seasat satellite mission in 1972, the first multisensor spacecraft, dedicated specifically to ocean observations.
Specific objectives were to collect data on sea-surface winds, sea-surface temperatures, wave heights, ocean topography, internal waves, atmospheric water, and sea ice properties.
Requirements for Seasat were generated by a User Working Group (UWG), which included the Office of the Oceanographer of the U.S. Navy, Fleet Numerical Weather Center in Monterey, CA, Navy Surface Weapons Center in Dahlgren, VA, Naval Research Laboratory, the Johns Hopkins University Applied Physics Laboratory (APL), the Office of Naval Research, and the Navy/NOAA Joint Ice Center. NOAA was represented on the UWG by the many NOAA laboratories around the nation, including the NOAA Atlantic Oceanic Marine Laboratory (AOML) in Miami, FL, the NOAA weather centre in Suitland, MD, the NOAA Pacific Marine Environmental Laboratory in Seattle, WA, and NOAA's Marine Fisheries office in Bay St Louis, MS; the Defense Mapping Agency, United States Geological Survey (USGS), the U.S. Coast Guard, the Department of the Interior and the Department of Agriculture (AgriStars program) were also represented on the UWG.
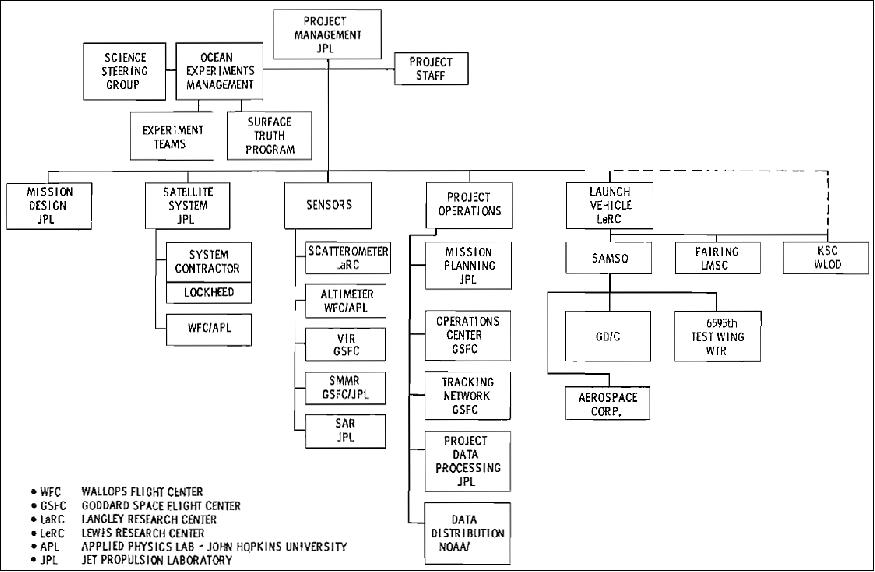
The SeaSat project was managed by JPL for NASA, with significant participation from NASA's Goddard Space Flight Center, Greenbelt, MD; NASA's Wallops Flight Facility, Wallops Island, VA; NASA's Langley Research Center, Hampton, VA; NASA's Glenn Research Center, Cleveland, Ohio; Johns Hopkins University Applied Physics Laboratory, Laurel, MD; Lockheed Missiles and Space Systems, Sunnyvale, CA; and the National Oceanic and Atmospheric Administration (NOAA), Washington, D.C.
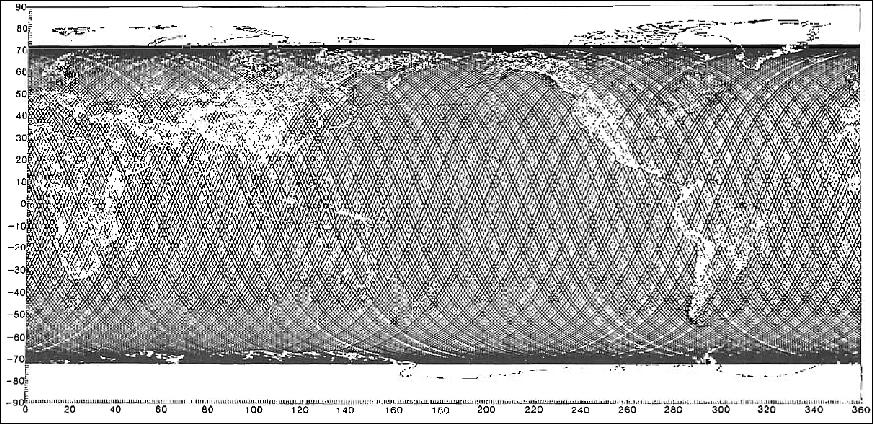
SeaSat-A mission objectives: 8) 9) 10)
The SeaSat-A Project is a proof-of-concept mission whose objectives include a demonstration of techniques for global monitoring of oceanographic phenomena and features, the provision of oceanographic data for both application and scientific users and the determination of key features of an operational ocean dynamics monitoring system.
The specific mission objectives are:
• Provide an evaluation of sensor capabilities to measure the following geophysical parameters:
- Wave heights
- Wavelength and direction
- Surface wind speed and direction
- Ocean surface temperature
- Atmospheric water content (liquid and vapour)
- Sea ice morphology and dynamics
- Icebergs.
• Provide oceanographic data for participating users and, following geophysical evaluation, for distribution to the general user community:
- Predictions of wave height, directional spectra and wind fields for ship routing, ship design, storm damage avoidance, coastal disaster warning, coastal protection and development, and deep water port development.
- Maps of current patterns and temperatures for ship routing, fishing, pollution dispersion and iceberg hazard avoidance.
- Charts of ice fields and leads for navigation and weather prediction.
- Charts of the ocean geoid fine structure.
• Determine key features of an operational ocean dynamics monitoring system including:
- Sensor operation
- Global sampling
- Production of geophysical data records
- Near real-time data handling
- User operations interaction
- Precision orbit determination
• Demonstrate the economic and social. benefits of user agency products.
Interagency involvement:
The program was designed as a US Interagency program with NASA as the lead agency. All data analysis would be funded by agencies other than NASA. Commercial use was an important part of the program from the very beginning.
1) Relationship between NASA and User Agencies - General (from the SeaSat Program Plan - 1973): (Ref. 9)
• The program will be closely supported by and of considerable benefit to a substantial number of agencies and government and commercial organizations.
• The program has been considered since its inception to be a joint NASA/Interagency Cooperative effort ... requiring interagency support and cooperation.
• Large-scale data analyses required by the user community will be funded and performed in the interested organizations.
2) Relationship Between NASA and User Agencies - Particular (from Mission Operation Report):
• Naval Fleet Numerical Weather Central will process and distribute real-time weather data to support weather forecasting and maritime experiments.
• NOAA Environmental Data Service will archive and distribute geophysical data processed by NASA for non-real-time studies.
• NOAA, Navy, Coast Guard, Geological Survey, and the NSF (National Science Foundation) will fund scientific experiments based on SeaSat data.
• Experimental teams composed of scientists supported by these agencies will evaluate the geophysical performance of the SeaSat instruments.
Unfortunately, this cooperation was mostly unfunded and never happened. NOAA never received congressional approval and funding for its part of the mission. - After the early failure of the satellite, funds programmed for satellite operations were reprogrammed by W. Stanley Wilson to fund a SeaSat Data Utilization Project.
SeaSat managers, with advice from scientists, released data to all with a demonstrated interest in evaluating data. This led to a very rapid understanding of measurement accuracies, the usefulness of data, and scientific and applied results.
Commercial Uses:
1) Commercial users were involved initially through the SeaSat UWG (User's Working Group)
2) Extensive cost-benefit studies commissioned by NASA indicated significant economic benefits from SeaSat
3) As a result, commercial users were interested in documenting the usefulness of SeaSat data for their operations
4) Commercial demonstration program began in 1977 with 15 companies participating.— SeaSat Success Statement.
Commercial Results:
1) 16 users completed 18 two-year studies at no cost to NASA beyond the cost of supplying data. They found:
- SeaSat data can significantly improve the forecast of winds, waves, and the location of storms
- Improved forecasts lead to better routing of ships with substantial savings in operating costs
- SeaSat data are useful for establishing the climatology of offshore areas leading to better selection of offshore equipment
- Fish catch and oceanic conditions are correlated, hence SeaSat data lead to more efficient fisheries.
2) Usefulness of the results has led to a continuation of the program.
- Real-time satellite data are now being provided to commercial users through the Fleet Numerical Oceanographic Center.—SeaSat Success Statement.
Government Agencies Involved in the SeaSat Program:
• DOC (Department of Commerce)
- NOAA (National Oceanic and Atmospheric Administration)
- Maritime Administration
• DoD (Department of Defence)
- Director of Defense Research and Engineering
- NRL (Naval Research Laboratory)
- DMA (Defence Mapping Agency)
- Fleet Numerical Weather Center
- Naval Oceanographic Office
- Coastal Engineering Research Center
- Corps of Engineers.
• DOT (Department of Transportation)
- Coast Guard
• NSF (National Science Foundation)
• DOI (Department of Interior)
- Geodetic Service
- Geological Service
• DOA (Department of Agriculture).
SeaSat Milestones:
• Initial requirements: ''Oceanography From Space" conference at Woods Hole, August 1964
• Improved requirements: "The Terrestrial Environment: Solid Earth and Ocean Physics: Application of Space and Astronomic Technique" at the Williamstown Conference, MA, August 1969
• SeaSat Users Working Group Formed, 1972
• SeaSat Phase-A reports: Applied Physics Laboratory, Goddard Space Flight Center, Jet Propulsion Laboratory, July 1973
• SeaSat Phase-B Reports (same laboratories), August 1974
• Program and Project Start: January 1975
• Launch and Satellite Operation Period: 26 June - 10 October 1978
• SeaSat Data Utilization Project: 1979-1982.
SeaSat Organization:
• Program Office: NASA Office of Applications, Special Programs Division; later the Office of Space and Terrestrial Applications, Earth and Oceans Division.
• Project Office: Jet Propulsion Laboratory
• Satellite Prime Contractor: Lockheed Missiles and Space Company, Sunnyvale, California.
• Data Processing:
- Sensor and Geophysical Data Records: Jet Propulsion Laboratory
- Operational and Precise Orbits: Goddard Space Flight Center
- Real-time processing: Navy Fleet Numerical Weather Central
- Archives: NOAA National Environmental Satellite Data and Information Service and Jet Propulsion Laboratory Pilot Ocean Data System
• Geophysical Evaluation
- Initially by experiment teams funded by user agencies
- After the end of the mission by the SeaSat Data Utilization Project.
January 1973 | NASA's Director of Earth and Ocean Programs, Frank Williams and his Deputy, Ben Milwitsky, invite largely U.S. Government and University Ocean and Arctic Scientists to meet under the auspices of their Earth and Ocean Science Program to discuss a special satellite mission dedicated to their needs as well as the broader 10-year horizon range of earth and ocean science program requirements. The concept mission is given a name, "SeaSat". |
1974, Q1, Q2, Q3, Q4 | NOAA's John Apel and NASA/JPL's Alden Loomis invite colleagues to come together under a NASA-sanctioned group ultimately identified as the SeaSat UWG (User Working Group). Users begin to attend quarterly meetings held at NASA Headquarters. Meetings typically draw up to 50 participants from many organizations with ocean and arctic interests and ideas about how to proceed. |
1974 | JPL's Walt McCandless is asked to lead the program effort and moves to NASA Headquarters to become SeaSat Program Manager as part of the Frank Williams Organization. Initial efforts are directed at working with the UWG to further refine the program plan and to begin to identify industry participants interested in developing the radar/microwave sensors and the satellite and ground systems required for SeaSat. The SeaSat UWG expands to include Ocean Industry Users and begins to entertain international participation in the form of systems contribution and scientific experiments. |
1975 Q1 | JPL is selected as the NASA Lead Center for SeaSat and invites the industry to provide Phase B Systems Design Concepts and associated Cost and Schedule estimates. Five contractors respond: General Electric Space Systems in Valley Forge, PA; Lockheed Missiles and Space Corporation in Sunnyvale, CA; Rockwell Space Systems in Seal Beach, CA; RCA Space Systems in Princeton NJ; and TRW in Redondo Beach, CA. |
1975 Q3 | After first being set aside as a New Start Program in the Federal Budget, SeaSat is restored during Senate and House Conference Proceedings as a result of extensive lobbying by prospective SeaSat users. SeaSat is conceived as a design-to-cost program with a budget cap of $ 68 M plus launch vehicle costs. |
1975 Q4 | JPL appoints Gene Giberson as Project Manager. The SeaSat Project Team is assembled and SeaSat Request for Proposal efforts begin to select the satellite development team. General Electric and Lockheed respond with proposals. |
1976 | After considerable evaluation and program reshaping, LMSC is selected as the SeaSat Systems Provider. JPL is designated the project centre for the SAR, NASA Langley for the Scatterometer, NASA Wallops for the Altimeter in conjunction with APL, and NASA GSFC for the Microwave Radiometer. Science subgroups are formed to develop experiments and validation procedures for each instrument within the User Working Group. |
1976-1977 | The SeaSat system takes shape under the able guidance of Gene Giberson and the JPL Project Team and the Lockheed Team under the direction of John Solvanson. International participation takes shape with the User Working Group participation extending to include scientists from around the world and project participation in the form of ground stations contributed by Canada and Europe. |
1977-1978 | Systems Assembly, Integration and Test take place at Lockheed facilities in Sunnyvale, CA and the SeaSat sensors and space systems take shape. The program meets cost and schedule milestones by adhering to careful design goals and plans and is implemented 28 months from the project go-ahead. |
June 26, 1978 | SeaSat is launched into space from Vandenberg AFB near Lompoc California using an Atlas-Agena launch vehicle. All systems correctly deploy on schedule, and initial turn-on and checkout sequences are successful. |
June-Oct. 1978 | SeaSat sensors collect global data sets, performing special validation experiments at selected locations. International participation adds data collection sites and special global experiments expanding SeaSat observations and applications. |
October 8, 1978 | An unexpected spacecraft power failure stills SeaSat's Voice. However, the valuable data collected by SeaSat spurs scientists and engineers worldwide to begin new projects to continue the SeaSat experience with new missions based on the SeaSat design and applications heritage. 25 years later there is a rich legacy based on this pioneering project. |
Spacecraft
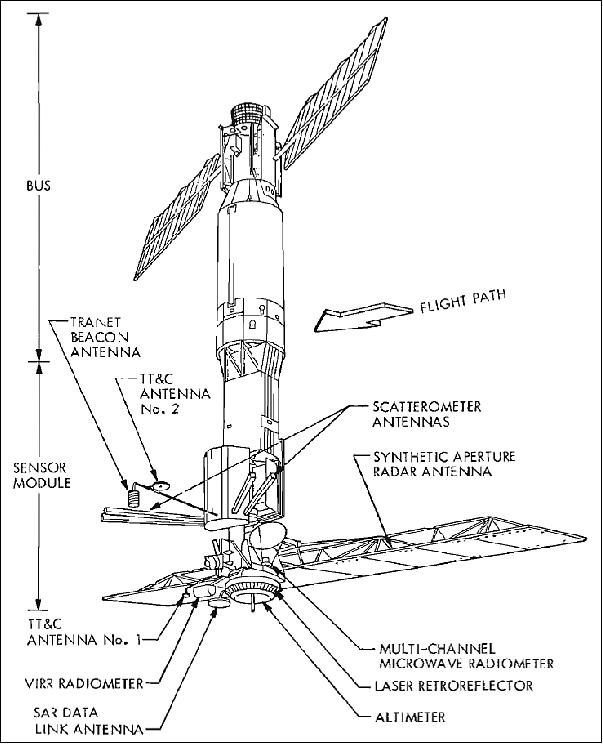
The spacecraft was designed and developed by LMSC (Lockheed Missiles and Space Company) as the prime contractor and by Ball Aerospace Systems of Boulder, CO. The satellite utilized the Agena upper stage to provide satellite bus functions, including power, telemetry (S-band), attitude control, and command and control functions. A sensor package containing the mission's five experiments was attached to the Agena, as were the experiments' antenna systems. Seasat was three-axis stabilized using momentum wheels and horizon sensors. The vehicle was oriented with the SAR and other antennas remaining nadir pointing and the Agena rocket nozzle and solar panels zenith pointing. S/C size: 21 m length, 1.5 m diameter, total S/C mass=2290 kg. The spacecraft design life is 1 year with expendables, including orbit adjusts capability, for three years. 12) 13) 14)
Application: Ice and ocean monitoring (sea-surface winds, sea-surface temperatures, wave heights, internal waves, sea-ice features, ocean features, ocean topography, and the marine geoid), land use, geology, forestry, and mapping.
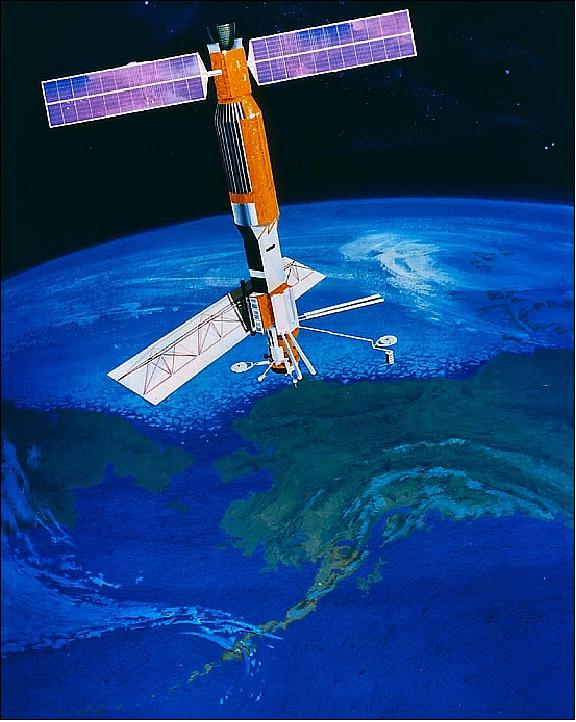

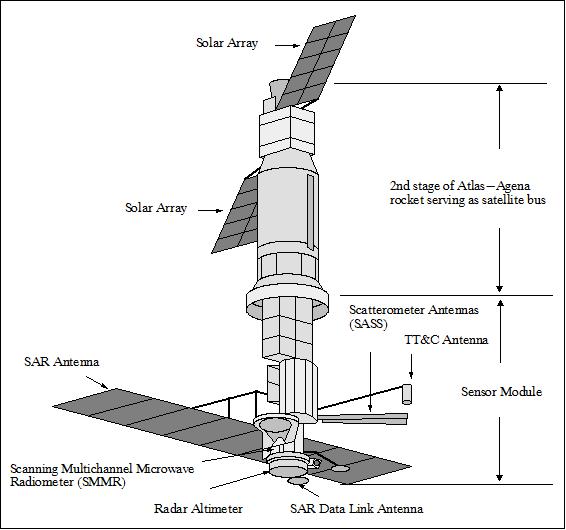
The Agena as the second stage of the Atlas-F/Agena launch vehicle, serves as the satellite bus providing attitude control, power, guidance, telemetry and command functions. The sensor module is tailored specifically for the SeaSat payload of five microwave instruments and their antennas. Together, the two modules are ~ 21 m long with a maximum diameter of 1.5 m without appendages deployed. Atop the Atlas booster rocket, the entire satellite is enclosed within a 3 m diameter nose fairing which matches the diameter of the Atlas. After burnout of the Agena stage and injection into the nominal orbit, SeaSat has a mass of nearly 2300 kg. 15)
In orbit, the satellite appears to "stand on end" (Figure 6) like a pencil, the sensor and communications antennas pointing toward nadir and the Agena rocket nozzle and solar panels pointing opposite toward space. The dominant feature of the SeaSat spacecraft is the SAR antenna, a 2.1 m x 10.7 m planar array deployed perpendicular to the satellite body.
ACS (Attitude Control Subsystem): The spacecraft is 3-axis stabilized using a momentum wheel/horizon sensing system to accurately point the sensors at Earth's surface. Hot gas jets provide thrust for adjusting the orbit and for attitude control during Agena burn and orbit adjustment periods.
Following orbital insertion, ACS orients the spacecraft from nose-forward to nose-down and provides stabilization during deployment of the antennas and solar arrays. These functions are performed using hydrazine reaction control thrusters for attitude control and a gyro reference unit as one attitude reference, augmented by horizon sensors for a short period prior to nose-down.
The payload pointing requirements include control to an accuracy of 0.5º in roll, pitch and yaw and telemetered data on the spacecraft orientation to an accuracy of 0.2º in all axes. Scanwheels provide pitch and roll references viewing the Earth's horizon and pitch and roll fine control. The yaw attitude is maintained by gyrocompassing. Sun sensor data is used to determine accurately the yaw orientation, but is not used for control. The scanwheels are mounted at the lower end of the sensor module near all of the critical antennas. The pitch momentum wheel and roll reaction wheel are located in a support structure above the sensor module. Excess momentum accumulated in the wheels is removed by providing adjustable torque on the satellite using electromagnets which interact with the Earth's magnetic field.
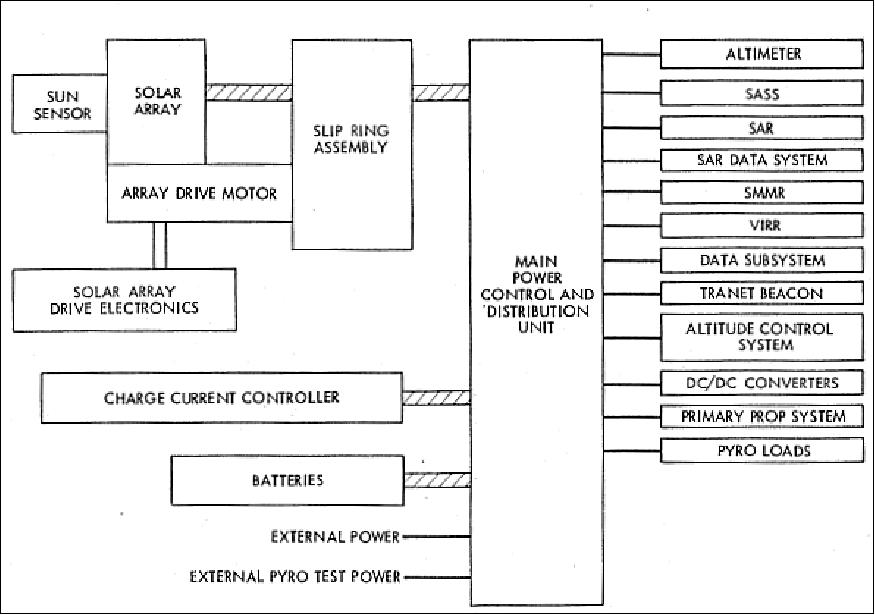
EPS (Electrical Power Subsystem): EPS was designed to provide power at 28 ±4 VDC to the spacecraft subsystems and to the payload using solar arrays and rechargeable batteries. The basic design philosophy was to provide functional redundancy. A capability was provided for component isolation (removal from circuit), cross-strapping, charge control (automatic and manual); in addition, system protection was implemented via bypass functions by commandable relays (Ref. 18).
The primary energy source for the spacecraft was the SA (Solar Array) which consisted of two wings mounted on either side of the aft rack. With the vehicle in the normal orbital attitude and the SA deployed in the X-Y plane, the wing axis lay 40º ahead (toward the direction of flight) of the +Y axis and 40º behind the -Y axis. The wings tracked the sun through 360º about this axis using error signals generated by the sun sensors located on each solar array wing. The signals generated by the sun sensors were processed in the SADE (Solar Array Drive Electronics) which provided power to control the array drive motor speed.
During periods of eclipse, the array was driven by a fixed angular rate by signals from the SADE. In addition, the rotation direction and rate could be controlled by commands. Each wing contained 11 panels. The average power output capability varied during the life of the spacecraft due to the seasonal intensity of the sun, the angle to the sun (β angle), eclipse periods, and various factors which degrade the power output capability of the solar cells. During full sun, the SA supplied power to all the loads as well as for charging the 2 type 40 NiCd batteries. The batteries supplied the total spacecraft load requirements during eclipse and supplied the surge loads when they exceeded the instantaneous capability of the SA.
Power of ~1000 W was provided at the beginning of the mission, varying throughout the mission to ~ 700 W. The average on-orbit power was about 700 W. The solar panels were rotatable on one axis; they made up an area of 14.5 m2 of solar cells.
RF communications: The data collected by the sensors are converted from analog to digital, except for that of the SAR instrument. Data are transmitted from the satellite in three separate streams: a 25 kbit/s real-time stream containing instrument data from ALT, SASS, SMMR, and VIRR and all engineering subsystem data, an 800 kbit/s playback stream of recorded real-time data, and a 20 MHz analog SAR instrument data stream, receivable only in real-time by specially equipped tracking stations.
An onboard data storage capacity of ~ 350 Mbit is provided - the equivalent of more than two full orbits of measurements from all sensors with the exception of the SAR instrument. SAR data is not recorded.
Redundant S-band transmitters and receivers, functioning as transponders, provide the communications link for engineering and payload data. A separate S-band transmitter (5 W) with its own helical antenna provides the SAR downlink in real-time.
In addition to the primary tracking information from SeaSat's S-band communication system, two independent tracking systems aid in navigation and orbit determination. Laser tracking signals originate from ground sites and are reflected from an array of retroreflectors on the spacecraft.
A dual-frequency beacon transmits ultrastable carriers to a ground tracking network, TRANET. The TRANET, operated by DoD (Department of Defense), receives the dual-frequency Doppler beacon from SeaSat. The tracking measurements are used to supplement the STDN S-band tracking for orbit determination. Onboard equipment includes an ultrastable transmitter radiating at 162 MHz and at 324 MHz. SeaSat uses this frequency also as a source for satellite data timing.
Sensor Module and Payload Accommodation
The sensor module is a platform for the operation of the five sensors to achieve the mission objectives within the required resolution and accuracy. The sensors are located in positions relative to one another and to the beacon, laser retroreflector and communication antennas so that each ahs an unobstructed field of view and each achieves the required pointing and scan angle. The mounting positions were also selected to prevent electromagnetic interference between multiple radiating sources.
The sensor module's primary structure is a 25.4 cm diameter aluminum alloy tubular mast to which equipment mounts are attached.
Two scanwheel assemblies are mounted near the forward end on the tubular supports to give each unit a clear view of Earth's horizon.
The ALT (Radar Altimeter) is mounted at the end of the mast structure - nearest to Earth - the 1 m diameter reflector antenna and RF unit on the forward end and the signal processor to the side. The ring of the corner cube quartz reflectors for the laser tracking system surrounds the altimeter antenna and RF electronics module.
The SASS (Microwave Scatterometer) and Doppler beacon transmitter for the TRANET tracking system are mounted in a support structure on the side of the mast. Four slotted array stick antennas for the SASS are stowed against the structure and each is deployed separately. The TRANET antenna is attached to a deployable boom which also supports on of the two S-band communication antennas. The second is deployed on a separate boom.
The VIRR (Visible and Infrared Radiometer) consists of a scanner mounted on a deployable boom and electronics on the mast tube.
The SMMR (Scanning Multifrequency Microwave Radiometer) is mounted as a single unit on the side of the sensor module structure. The unit includes a fixed offset parabolic reflector, scan mechanism and a digital processor.
The SAR /Synthetic Aperture Radar) antenna and the electronics are installed near the base of the sensor module. The huge SAR sensor antenna is in eight segments, folded during launch and deployed to form a flat rectangular array with an area of 23 m2. The SAR downlink transmitter is mounted on the mast and its helical antenna is deployed on a short boom.
Launch
The SeaSat spacecraft was launched on June 27 (UTC), 1978 on an Atlas-F/Agena launch vehicle from VAFB (Vandenberg Air Force Base), CA, USA.
Orbit: Non-sun-synchronous near circular polar orbit, inclination = 108º, apogee = 799 km, perigee =775 km, period = 101 minutes, repeat cycle of 17 days (subcycle of 3 days).
Mission Status
• October 9, 1978: The SeaSat mission experienced an abrupt power failure in the Agena bus, resulting in the end of the mission. The power loss was caused by a progressive short in a slip ring assembly used to connect the rotating solar arrays to the power subsystem. This short was most likely the result of the initiation of an arc between adjacent slip ring brush assemblies.
• June 27, 1978: SeaSat was successfully launched aboard an Atlas-F/Agena launch vehicle from the Vandenberg Air Force Base in California. The spacecraft was inserted into a non-sun-synchronous near circular polar orbit, with a 108° inclination, an apogee of 799 km and a perigee of 775 km.
• September 19, 1977: NASA signed an agreement with Canada's Department of Energy, Mines and Resources (EMR) to establish a Canadian ground station in Newfoundland to receive SeaSat data. The data will be used to support the Canadian Surveillance Satellite (SURSAT) project, and surface-truth information will be relayed to NASA at no cost.
Sensor Complement
The sensor complement consisted of active and passive instruments to achieve an all-weather capability. A new era of spaceborne oceanography was ushered in with the SeaSat sensor complement. All sensors operated at the same time, over the same region of the ocean, providing a truly synoptic view of the parameters important to the understanding of the dynamics of our ocean. 23) 24)
SAR (Synthetic Aperture Radar)
The SAR instrument features:
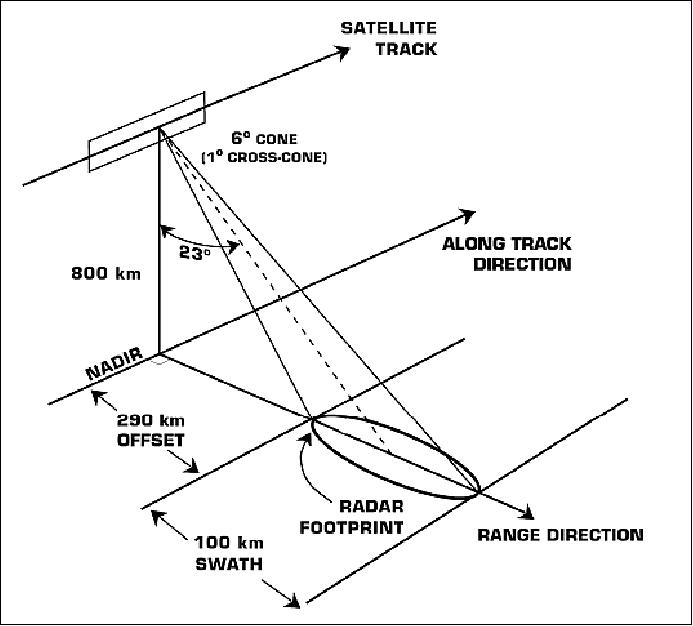
- HH polarization, look angle = 20º;
- pixel size = 25 x 25 m (spatial resolution on the surface at 4 looks);
- radiometric resolution = 5-bit raw data.
Sensor transmission frequency: 1.275 GHz (L-band); wavelength= 23.5 cm; swath width=100 km.
Antenna: 1024-element phased array antenna of size 10.74 m x 2.16 m; PRF= 1464 to 1640 Hz; pulse duration = 33.4 µs; bandwidth (linear FM) = 19.077 MHz; transmitted peak power = 1 kW (nominal). 25) 26) 27) 28) 29)
The planar antenna array consisted of eight, 1.3 m x 2.16 m rigid and structurally identical fibreglass honeycomb panels. The panels were hinged together in series but were individually supported by a deployable tripod substructure that governed the deployment of the truss and provided the interface of the antenna structure with the spacecraft.
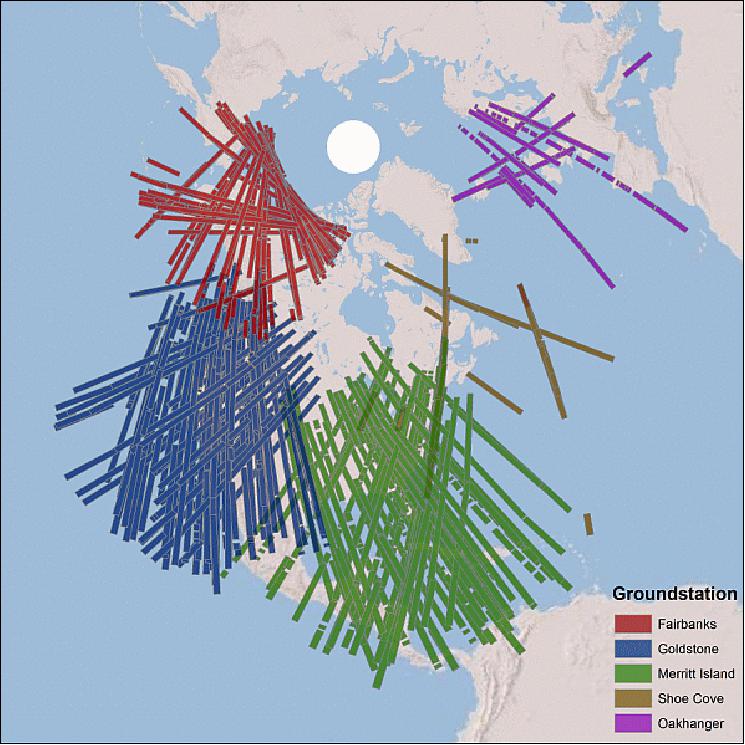
The Seasat SAR sensor is regarded as the first imaging SAR system used in Earth orbit. The SAR antenna is mounted on the S/C with its boresight oriented at 20º from the vertical direction (look angle), pointing to the right of the flight path. The antenna beamwidth measures 6.2º in elevation and 1º in azimuth. A footprint of 100 km x 15 km (3 dB contour) is provided. The swath extends from 290 km to 390 km to the right of the S/C ground track (Figure 10). The received radar echoes are downlinked in S-band (analogue data link at 2.265 GHz) to a total of five ground receiving stations in real-time located at Goldstone, CA, Fairbanks, AK, Merrit Island, FL, Shoe Cove, Newfoundland, and Oakhanger, UK. No high-rate onboard recording capability of SAR data was available at the time.
Parameter | Value | Parameter | Value |
Radar centre frequency | 1.275 GHz (L-band) | Radar wavelength | 23.5 cm |
System bandwidth | 19 MHz (linear FM) | PRF | 1464-1640 Hz |
Pulse duration | 33.4 µs | Polarization | Horizontal transmit, horizontal receive (HH) |
Antenna dimensions | 10.74 m x 2.16 m | Antenna look angle | 20º from vertical (fixed) |
Ground incidence angle | 23º±3º cross track | Antenna type | 1024-element passive microstrip-based arrays antenna, linearly polarized |
No of looks | 4 | Pixel size | 25 m x 25 m |
Swath width | 100 km | Transmitted peak power | 1 kW |
Product name | Description |
Optically processed image | - Coverage: 30 km x swath length (range x azimuth) |
Digitally processed data | - Coverage: 100 km x 100 km |
The SAR instrument had a mass of 147 kg and a power consumption of 216 W (1000 W peak power). The instrument could only be operated from 10 minutes per orbit.
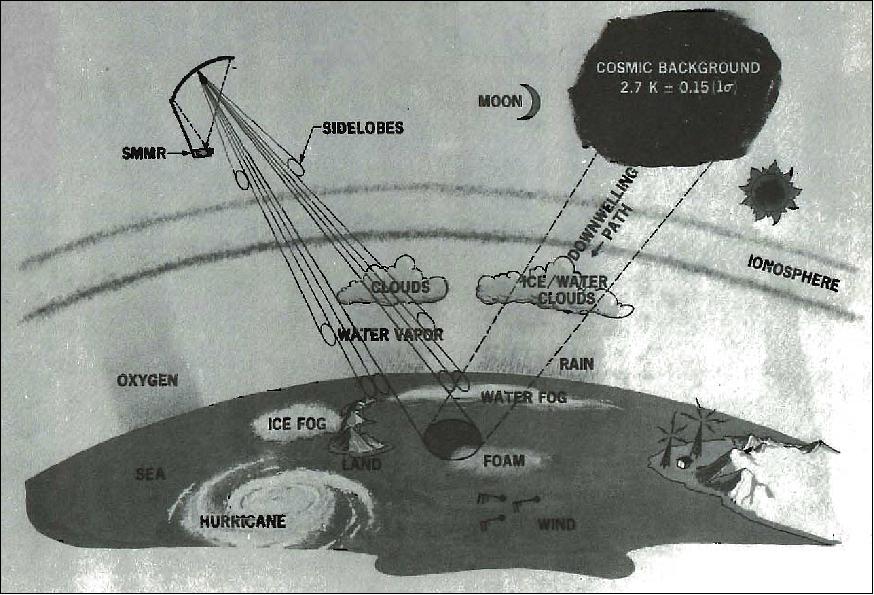
SMMR (Scanning Multichannel Microwave Radiometer)
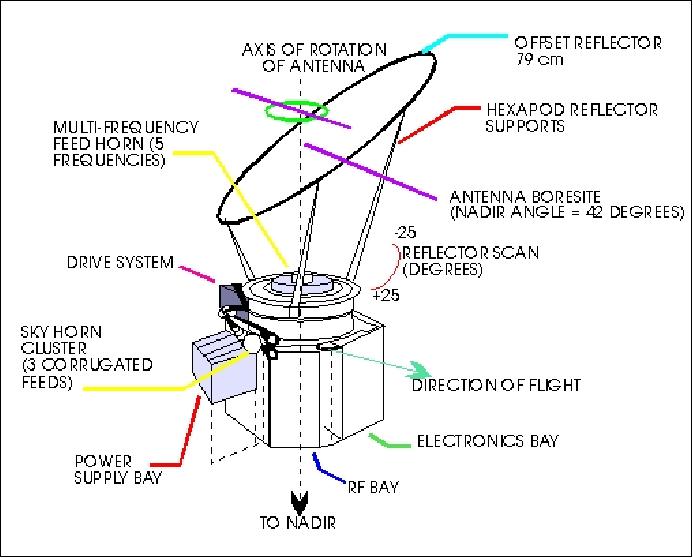
The SMMR is a five-frequency instrument of Nimbus-7 mission heritage. The instrument was designed and built at JPL. Objectives: Monitoring sea surface temperatures, wind speeds, rain rate, atmospheric water content (mapping of columnar water vapour distribution over the global oceans) and ice conditions. SMMR is a multispectral, dual-polarization microwave radiometer observing at the following frequencies: 6.6 GHZ (45.4 mm), 10.7 GHz (28 mm), 18.0 GHz (16.6 mm), 21.0 GHz (14.2 mm), and 37.0 GHz (8.1 mm). Six Dicke-type radiometers were utilized. Those operating at the four longest wavelengths measured alternate polarizations during successive scans of the antenna; the others operated continuously for each polarization.
The SMMR instrument consisted of five hardware elements:
• The antenna assembly consisting of the reflector, fabricated of graphite epoxy, and the feedhorn
• The scan mechanism, including momentum compensation devices
• An RF module containing the input and reference switching networks, the mixer-IF preamplifiers, and the Gunn local oscillators
• An electronics module containing the main IF amplifiers, all the post-detection electronics, and the power supplies for the scan and data subsystems
• A power supply module which contains the dc-to-dc converters and regulators for the rest of the instrument.
The antenna was a parabolic reflector offset from the nadir by 42º. The motion of the antenna reflector provided observations from within a conical volume along the ground track of the spacecraft. SMMR had a swath width of about 600 km and the spatial resolution ranged from about 22 km at 37 GHz to about 100 km at 6.6 GHz. The absolute accuracy of sea surface temperature obtained was 2 K with a relative accuracy of 0.5 K. The accuracy of the wind speed measurements was 2 m/s for winds ranging from 7 to about 50 m/s. An identical instrument was flown on Nimbus-7 (launch Oct. 24, 1978). 30) 31) 32) 33)
The SMMR instrument had a mass of 53.9 kg and a power consumption of ~60 W.
ALT (Radar Altimeter)
ALT is of S-193 heritage flown on Skylab and of ALT flown in the GEOS-3 mission. Objective: Determination of sea surface profiles, currents, wind speeds and wave heights (first attempt to achieve 10 cm altitude precision from orbit).
Goals of the ALT Experiment:
• Measure the height of the satellite above the ocean surface with an accuracy of ± 10 cm once per second.
• Measure wave height at the subsatellite point with an accuracy of ± 10% or 0.5 m, whichever is greater, once per second for wave heights from 1 to 20 m.
• Measure the backscatter coefficient with an accuracy of ± 1.0 dB.
• Combine altimeter measurements of height with an accurate ephemeris to determine the marine geoid, currents, tides, storm surges, etc.
The ALT instrument was a Ku-band compressed pulse radar altimeter (the first use of the full-deramp technique). With this new full-deramp technique no compression filter is required in the receiver. From SeaSat onwards, all altimeters have been using this technique, achieving a significant improvement in the resolution. The ALT instrument was designed and developed by JHU/APL. 34) 35) 36) 37) 38) 39)
Two of its unique features were a linear FM transmitter with a 320 MHz bandwidth, which yielded a 3.125 ns time-delay resolution, microprocessor-implemented closed-loop range tracking, automatic gain control, and real-time estimation of significant wave height. This instrument flew the first microprocessor (8080-based controller/tracker) in space. The altimeter operated at 13.56 GHz (Ku-band, chirp signal at 2 kW peak power) using a 1-m parabolic antenna pointed off nadir and had a swath width which varied from 2.4 to 12 km, depending on sea state. ALT operated in chirp pulse mode with a 3.2 µs uncompressed pulse width and 3.125 ns compressed pulse width. The precision of the height measurement was 10 cm (rms). The estimate of significant wave height was accurate to 0.5 m or 10%, whichever was greater, and the ocean backscatter coefficient had an accuracy of 1 dB.
In the SeaSat design, the number of echo samples is increased (compared to GEOS-3). The samples are spaced 3.125 ns apart to encompass the anticipated spread in ocean return for wave heights up to 20 m. In this case waveforms sampling is implemented by a bank of filters with 312.5 kHz bandwidth and spacing. In contrast with previous designs, the samples are an integral part of the altitude tracking process and are used in such a way that the system adapts as a function of wave height to optimize tracker performances. The altitude tracking loop is closed in two parts: a coarse adjustment of the local oscillator pulse timing in 12.5 ns step, and a fine adjustment.
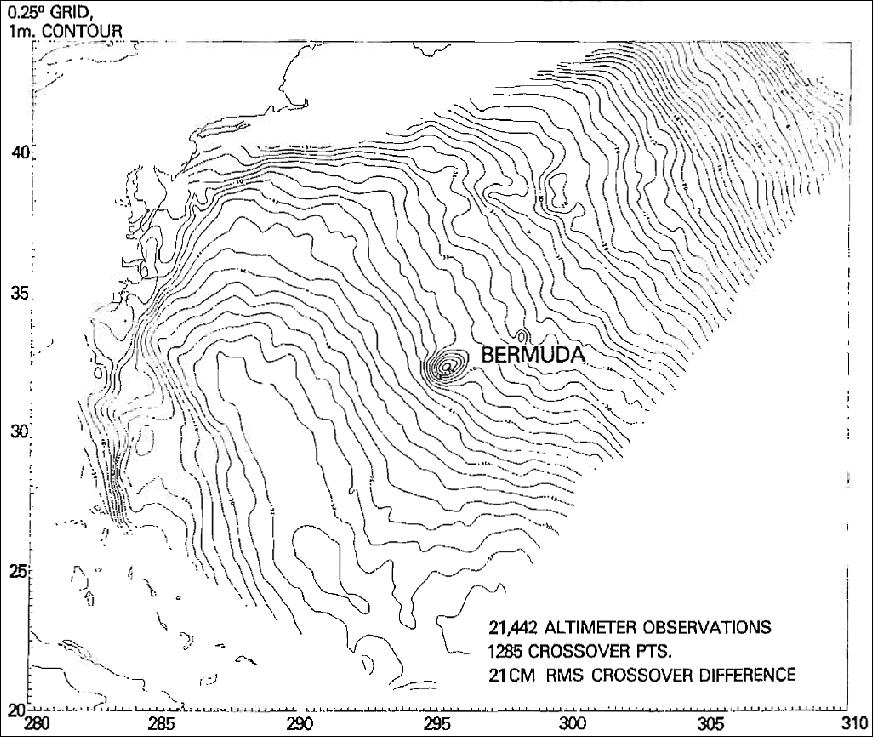
Calibration: The ALT instrument was calibrated for height bias using four overflight passes of Bermuda that were supported by the Bermuda laser. The estimated height bias was 0.0 ± 0.07 m. 40)

The ALT instrument had a mass of 93.8 kg and a power consumption of 177 W.
SASS (Seasat-A Scatterometer System)
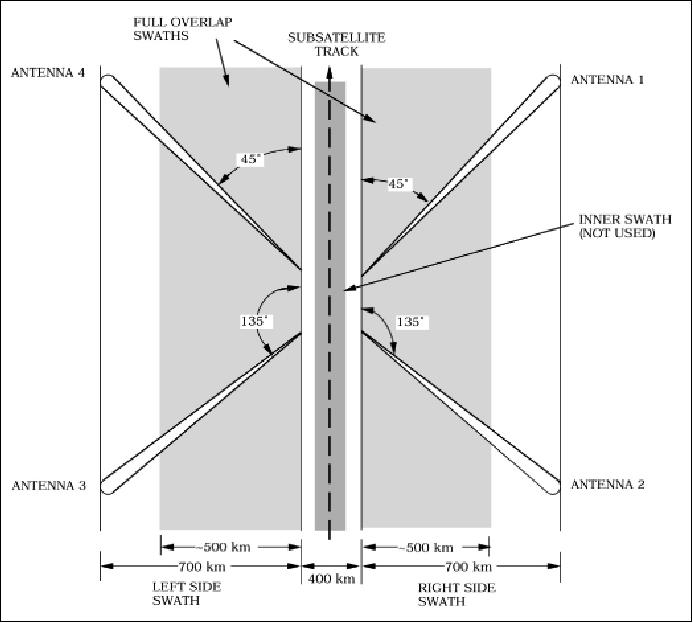
SASS (of S-193 heritage on Skylab) is a fan-beam dual-polarized Doppler scatterometer with the objective of radar backscatter measurements (sigma naught) over ocean surfaces for estimation of the wind field. Pulse transmit frequency of 14.599 GHz (Ku-band). SASS illuminated the sea surface with four fan-shaped beams (two orthogonal beams, each 500 km wide, on each side of the ground track). Doppler filters were used to discriminate resolution cells in the long dimension of the fan beam, resulting in 500 km swaths on either side of the satellite. The high wind swaths added an additional 250 km to each side. The spatial resolution was 50 km over a region of 200 to 700 km on either side of the spacecraft. The experimental SASS instrument first demonstrated the ability to accurately infer vector winds over the ocean's surface from a spaceborne platform. 41) 42) 43)
Note: The S-193 scatterometer on Skylab was also known by the name RADSCAT.
Frequency | 14.599 GHz (Ku-band) |
Polarizations | VV, HH |
Scanning mode | Fan-beam (2 sides) |
Beam resolution | Fixed Doppler |
Azimuth angle | 45º, 135º |
Near edges | 200 km from subsatellite track |
Swath width | 500 km on either side of the ground track |
Spatial resolution | 50 km |
SASS was a proof-of-concept experiment for measuring ocean surface wind vectors under day/night near-all-weather conditions. The physical basis for this remote sensing technique is the generation of capillary waves on the ocean surface by the friction velocity of the wind. The amplitude of these cm-wavelength ocean waves is in equilibrium with the local wind, and the two-dimensional wave spectrum is highly anisotropic with the wind direction. The ocean radar backscatter results from Bragg scattering from these capillary waves, and the normalized radar cross section (σο) grows approximately as a power series of wind speed.
The scatterometer on SeaSat was the primary means of measuring ocean surface wind speed and direction. Nonetheless, patterns of SAR-measured normalized radar cross section clearly showed spatial structures associated with variations in wind speed and direction. In the last five years, it has become more apparent that SAR imagery can be used to make high spatial resolution estimates of wind speed. 44)
Given our experience over the last 25 years, SeaSat was clearly a dramatically visionary satellite system. It provided the precursors to many subsequent spaceborne instruments. The SeaSat SAR was designed to provide ocean surface wave images from which ocean wave spectra could be derived. However, the imagery clearly showed features associated with variations in wind speed and direction. Since that time, a new generation of calibrated SARs has been launched which makes it possible to use what we learned from SeaSat to produce, on a routine basis and in nearly real-time, high-resolution SAR wind fields (Ref. 44).
The SASS instrument had a total mass of 103 kg (electronics assembly of 59 kg, each antenna had a mass of 11 kg), and power consumption of 100 W (peak).
VIRR (Visible and Infrared Radiometer)
VIRR is a supporting instrument on Seasat (of SR heritage on NOAA-1) with the objective to provide images of visual reflection and thermal infrared emission from oceanic, coastal, and atmospheric features that might aid in interpreting the data from the other Seasat sensors (also some quantitative measurements of SST and cloud top height). Scanning is accomplished by a rotating mirror mounted at 45º to the optical axis of the collecting telescope (scan angle=±51.2º). VIRR uses a 12.7 cm diameter Cassegrain-type telescope, focusing the radiation onto a field stop. A relay optical system transmits the radiation to a dichroic beamsplitter, which separates it into visible and infrared wavelengths. The swath of the VIRR is about 2280 km wide, centred on nadir. 45) 46)
Parameter | Visible Channel | Infrared Channel |
Spectral region | 0.49 - 0.94 µm | 10.5 - 12.5 µm |
Resolution |
|
|
Sensitivity (NEΔT) | Not applicable | 4 K with a scene at 185 K |
Dynamic range | 65 - 10,000 fL (scene brightness) | 180-330 K (scene temperature) |
Detector | silicon photovoltaic | thermistor bolometer |
Scan rate | 48 rpm | 48 rpm |
The VIRR instrument had a mass of 8.1 kg and a power consumption of 7.3 W.
LRR (Laser Retro-Reflector)
A device to support precision orbit determination for Seasat. Laser corner-cube reflectors, composed of 96 fused silica 3.75 cm hexagonal corner cube retroreflectors, and ground-based laser systems were used to obtain precise satellite tracking information. The retroreflector array was configured as a single ring of cube corners 1.27 m in diameter. Sixteen of the cube corners were tilted away from the axis of the ring by an angle of 25º and the remaining 80 cubes by an angle of 50º. Because of the great distance of the array from the centre of mass of the satellite, the range correction varied from 5.28 m at the zenith to 3.08 m near the horizon.
When illuminated by laser light pulses from the ground, each retroreflector cube in the array reflected the light pulses back to a telescope/receiver on the ground. A digital counter recorded the time of flight of the laser light pulses from the ground to the satellite and back to the ground. Range was determined from this time onwards with an accuracy of a few centimetres. The data were essential for the accurate calculation of the satellite's orbit (ephemeris). NASA, USAF, SAO (Smithsonian Astrophysical Observatory) and foreign laser tracking stations tracked this satellite.
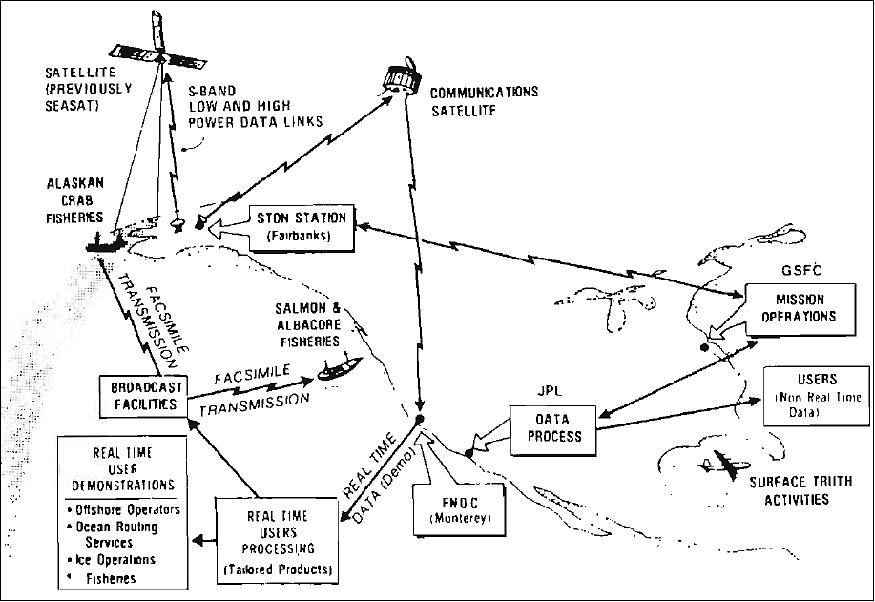
Ground Segment
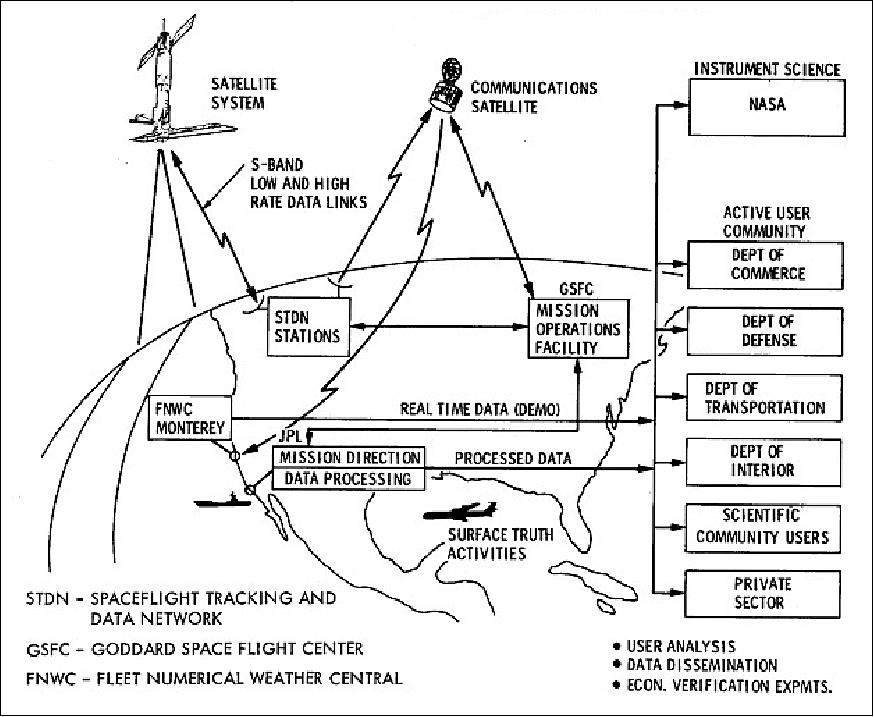
The Seasat mission was controlled by the real-time mission operations facility located at NASA/GSFC. Spacecraft data were received and recorded by the tracking stations of STDN (Spaceflight Tracking Data Network) and transmitted to GSFC. There, data were sorted, merged, time-tagged, and recorded on magnetic tape, which was then shipped to the IDPS (Instrument Data Processing System ) at JPL. SeaSat's five onboard sensor data were individually managed by the following centres:
• ALT (Radar Altimeter): Wallops Flight Center, VA
• SMMR (Scanning Multichannel Microwave Radiometer) and SAR: JPL
• SASS (SeaSat-A Scatterometer System): LaRC (Langley Research Center)
• VIRR (Visible and Infrared Radiometer): GSFC
The received SAR echoes were downlinked in S-band (analogue data link at 2.265 GHz) to a total of five ground receiving stations in real-time (no onboard high-rate recording capability was possible at the time; SAR data were only acquired when the satellite was in the sight of a ground station) located at Goldstone, CA, Fairbanks, AK, Merrit Island, FL, Shoe Cove, Newfoundland (provided by CCRS), and Oakhanger, UK (provided by ESA).
The downlinked analogue SAR data were recorded at the receiving stations on film using a cathode ray tube. The data were then processed into pictures using analogue Fourier Optical techniques in what is known as an "Optical SAR Processor." SAR echo data is effectively a microwave hologram of the illuminated area, so by recording this data on film, optical processing becomes the natural approach to forming an image of the ground.
Early SAR data users were hampered by enormous amounts of data and very limited computing power to analyze the data. Until 1978, SAR images were formed using analogue techniques, incorporating optical lenses and photographic film (initially, over 95% of the SeaSat data was processed in a survey mode using optical laser techniques).
Also in 1978, the first reconstruction of a SAR image was formed on a digital computer (a slow process at the time with the available computer power, but good quality imagery was generated with this technique). This SAR processor was developed by MDA (MacDonald Dettwiler) of Richmond, BC, Canada, for the purpose to manage SeaSat SAR data. These early digital SAR processors required all the processing power available in a system; they were installed on mainframe computers or on large dedicated hardware. A typical digital SAR scene of size 100 km x 100 km required 6 magnetic tapes of 1600 BPI. -- On the other hand, today's SAR images (since the late 1990s) can be formed on relatively inexpensive equipment like a workstation or a PC. 47) 48)
SeaSat Success Statement (Ref. 8)
Instrument | Radio frequency (GHz) | Swath width (km) | Spatial Resolution (km) |
ALT (Altimeter) | 13.5 | 2.8 (2 m significant wave height) | 7 |
SASS (SeaSat-A Scatterometer System) | 14.6 | 750+ 750 | 50 |
SMMR (Scanning Multichannel Microwave Radiometer) | 6.6 | 560 | 136 x 89 |
SAR (Synthetic Aperture Radar) | 1.3 | 100 | 0.025 |
VIRR (Visible and Infrared Radiometer | 0.49-0.94 µm | 2280 | 6.2 x 8.3 |
Instrument | Days of data collection | Data tapes (2400', 1600 bpi) | Condensed tapes | Comments |
ALT | 63.5 | 26 | 14 | no data during orbit adjust |
SASS | 91.0 | 381 | 48 |
|
VIRR | 94.2 | 97 | 295 70 mm images |
|
SAR | 48.0 | 44,100 — from date of first good science data (after engineering assessment) to end of mission | 516 film reels | all data optically processed digital images |
Geophysical Evaluation of SeaSat Data
• Evaluation was based on the open release of interim geophysical data and competition among groups of users.
- Interim geophysical data were distributed to all with a demonstrated interest in evaluating the data (no exclusive use of data).
• Evaluations initially included comparisons with surface observations but later expanded to include intercomparisons among instruments.
- Surface observations came from two large oceanographic experiments (Jasin and Goasex) and from buoys, ships, aircraft, and other spacecraft.
- The same variables were often measured by different instruments on SeaSat and the results could be intercompared; e.g., the wind speed was measured by four instruments.
• Results of the evaluation were discussed at workshops.
- 13 workshops and 2 colloquiums were held between January 1979 and May 1981.
• Results were then published in scientific journals.
- 6 special issues of journals plus dozens of papers were published.
Special SeaSat Journal Issues:
• Science, Vol. 204, No. 4400, pp. 1405-1424, June 29, 1979
• Journal of Oceanic Engineering, Vol. OE-5, No.2, April 1980
• Journal of Astronautical Sciences, Vol. XXVIII, No.4, October-December 1980
• Journal of Geophysical Research, Oceans and Atmospheres, Vol. 87, No. C5, 3173-3438, April 30,1982
• Journal of Geophysical Research, Oceans and Atmospheres, Vol. 88, No. C3, 1529-1952 February 28, 1983
• Marine Geodesy, Vol. 8, No. 1-4, 1-402, September 1984.
Altimeter Experiment Goals and Results
• Measure the height of the satellite above the ocean surface with an accuracy of ± 10 cm once per second.
• Measure wave height at the subsatellite point with an accuracy of ± 10% or 0.5 m, whichever is greater, once per second for wave heights from 1 to 20 m.
• Measure the backscatter coefficient with an accuracy of ± 1.0 dB.
• Combine altimeter measurements of height with an accurate ephemeris to determine the marine geoid, currents, tides, storm surges, etc.
Geophysical variable | Accuracy | Range of variable | |
Goal | Demonstrated | ||
Sea Level | < 1 m | 30-50 cm | 6357± 11 km |
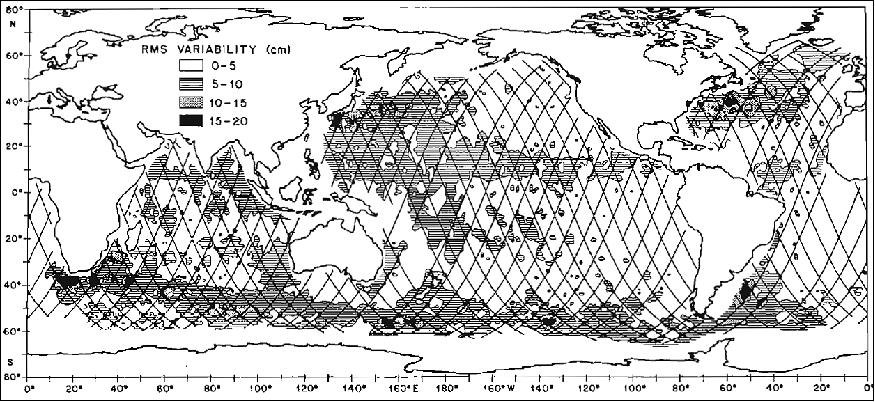
Variations in sea level | 10 cm | 3-5 cm | 6357± 11 km |
Significant wave height | 10% or 0.5 m | 10% | 1-5 m |
Wind speed | 2 m/s | 2 m/s (accuracy of averaged data, not individual measurements) | 4-15 m/s |
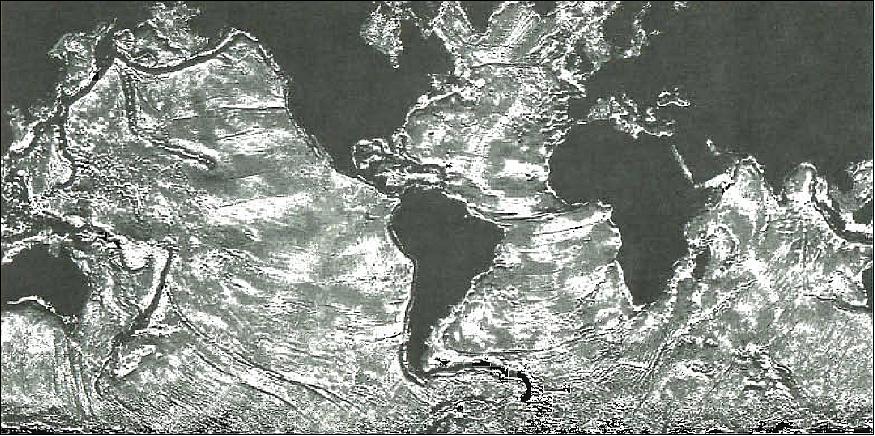
• Altimeter data were used to make detailed maps of the marine geoid with an accuracy of ± 1 m and a resolution of around 100 km.
- These maps have revolutionized our knowledge of the marine geoid, and are being used to study plate tectonics and mantle convection. and the marine lithosphere.
• Tides over entire ocean basins were directly observed from space for the first time.
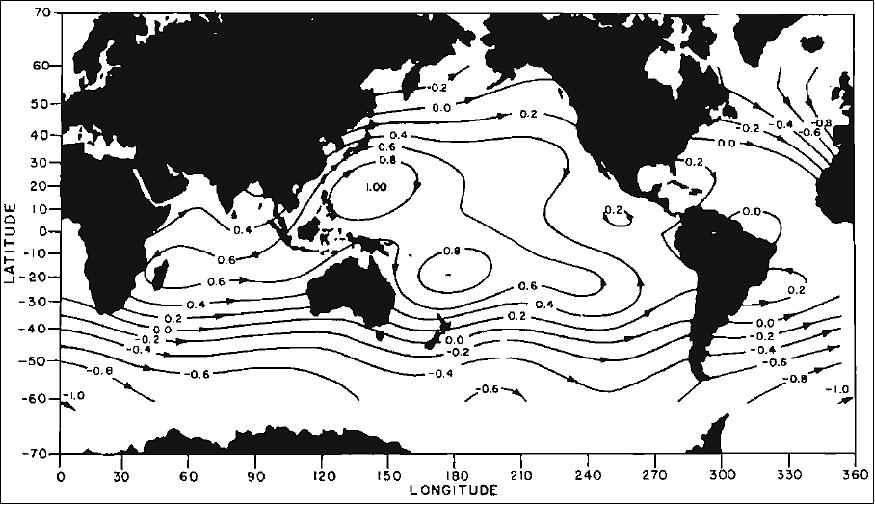
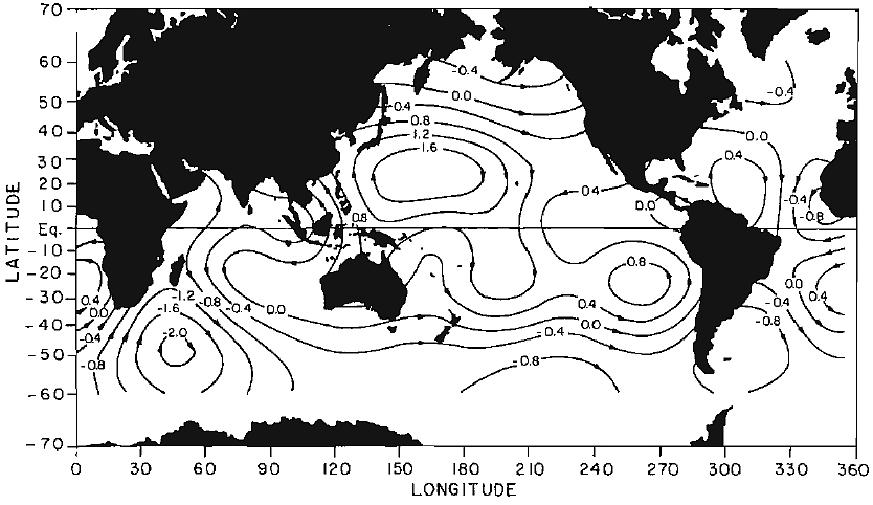
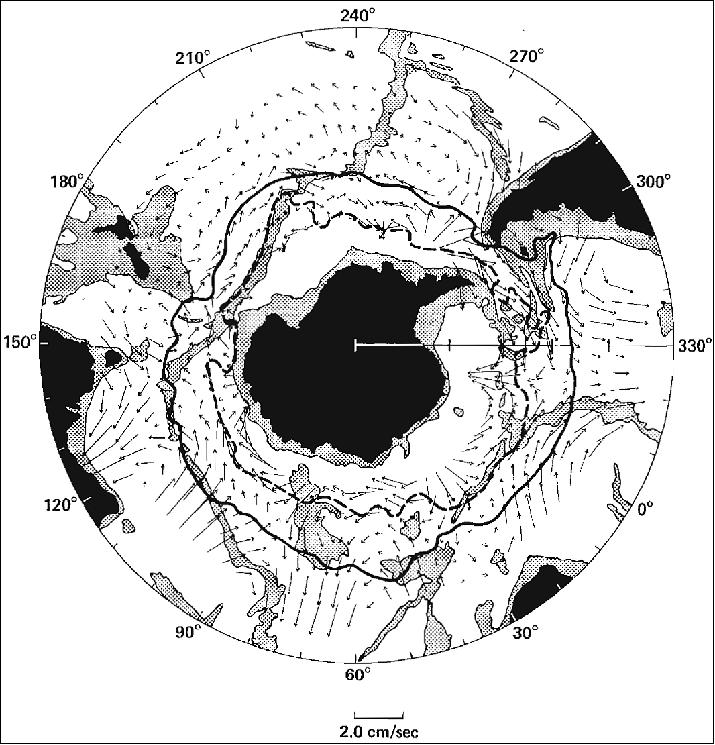
• Mean and variable ocean surface currents were mapped globally. - The maps of variable currents show new information.
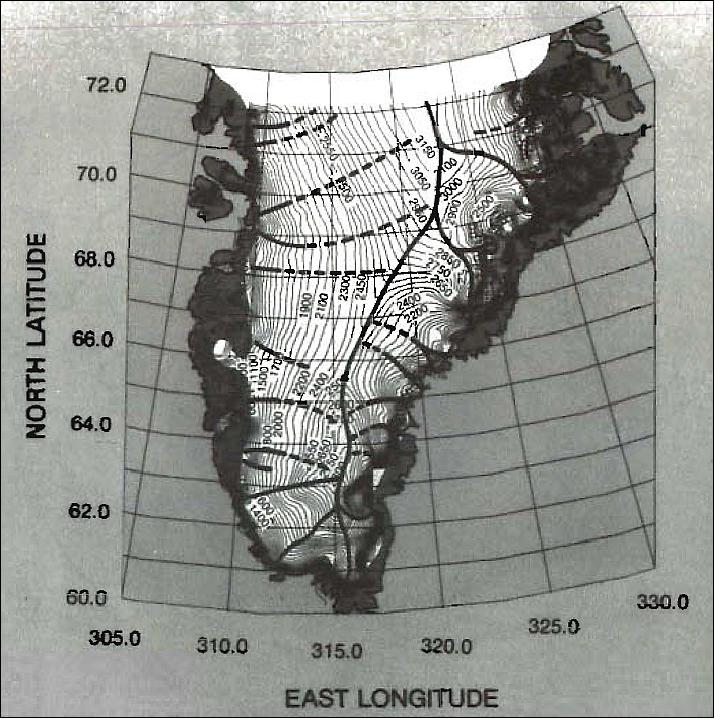
• Ice sheets in Greenland and along the Antarctic coast were profiled with great accuracy.
• Wave heights were mapped globally for the first time, and the propagation of waves across ocean basins was studied.


Precision Orbit Determination: Goals and Results
• Determine the best attainable precision and accuracy of the SeaSat ephemeris with a goal of submeter accuracy for the vertical component.
- The SeaSat ephemeris is now the most accurately known of any satellite in its class.
- The vertical component of the ephemeris is known with an accuracy of 50-70 cm globally, and improvements in accuracy are expected.
• Define methods for improved orbit determination.
- Altimeter and tracking data have been combined to yield new and more accurate techniques for orbit determination.
- SeaSat plus geodetic satellite data have led to an improved gravity field and better tracking station locations.
• Provide a precise ephemeris required to exploit fully the altimeter data for studies of sea-surface topography.
- The ephemeris was calculated with sufficient accuracy to enable the altimeter data to be used for studies of tides and currents.

Scatterometer: Goals and Results
• Provide closely spaced observations of surface wind speed and direction, from which vector winds can be derived on a global basis.
- Winds were measured on a 50 km grid.
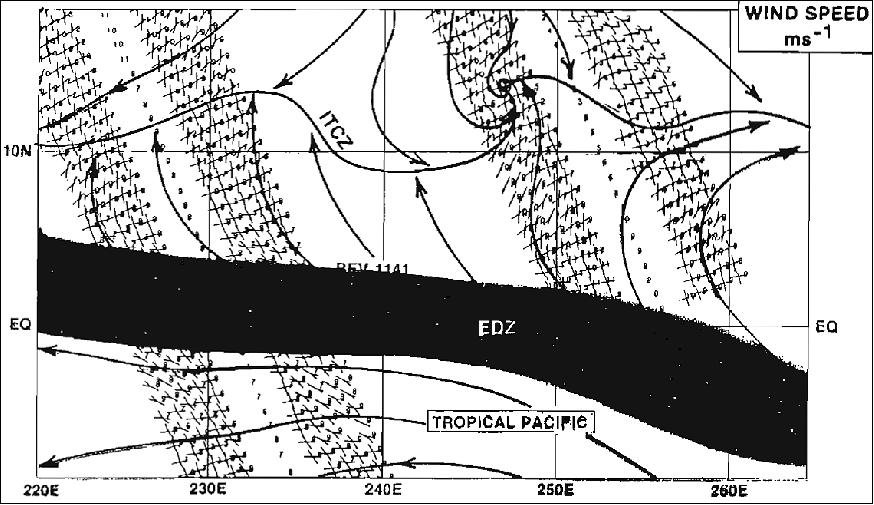
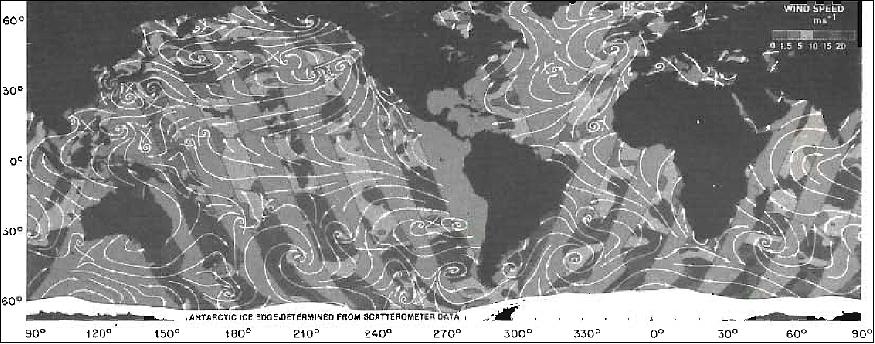
- Global maps of vector winds were produced. These were the first global maps of wind measured from space.
- Observed wind field is being used to test the usefulness of surface winds for weather forecasts and to test theories of atmospheric turbulences.
Geophysical variable | Accuracy | Range of variable | |
Goal | Demonstrated | ||
Wind speed | 2 m/s or 10% | 1.6 m/s | 3-16 m/s |
Wind direction | 20º | 18º | 360º |
SeaSat Scatterometer Marine Wind Analysis:
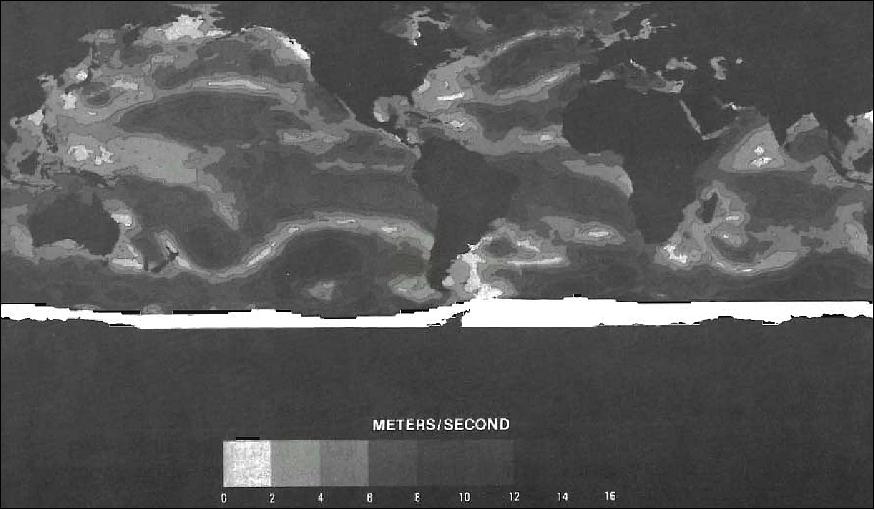
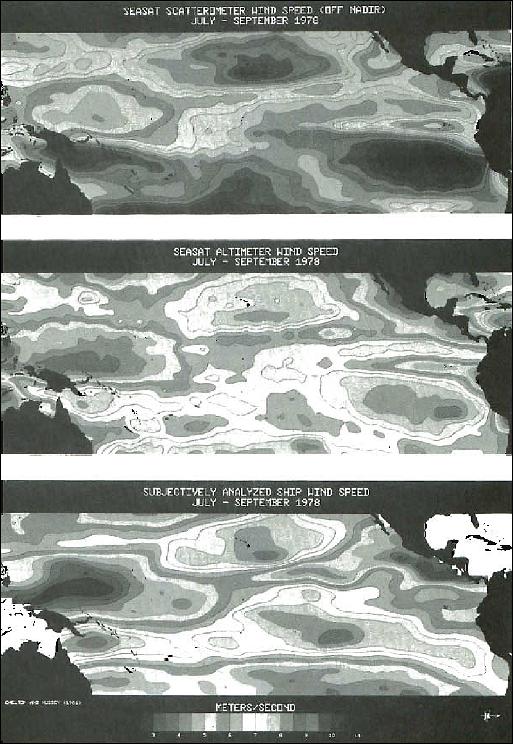
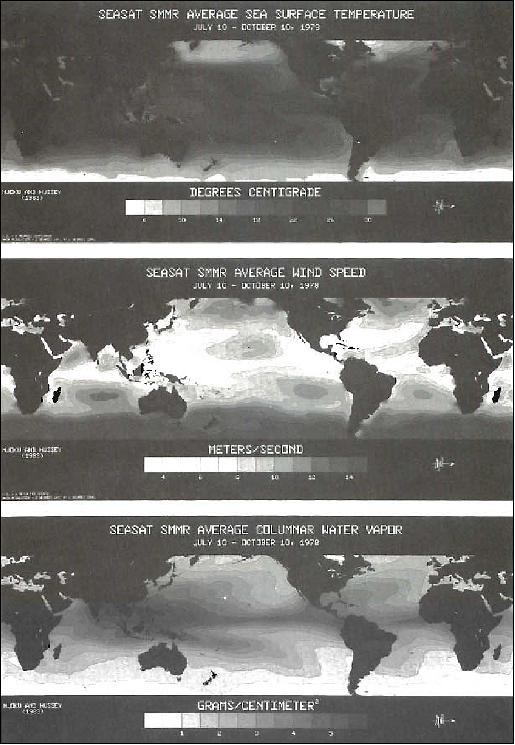
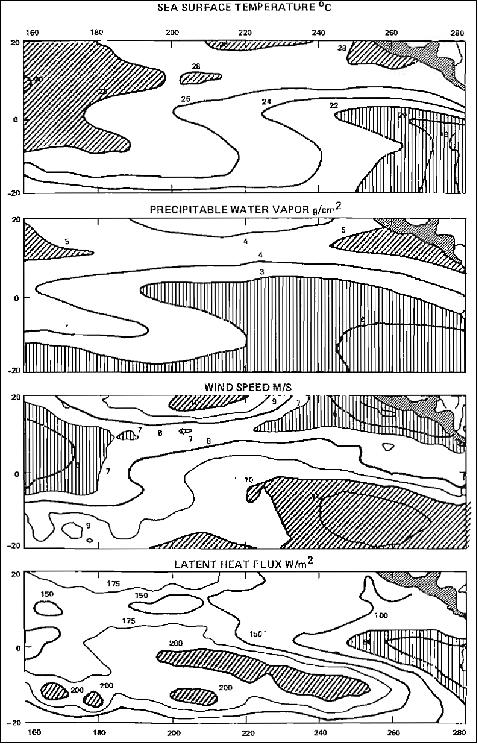
SMMR (Scanning Multichannel Microwave Radiometer): Goals and Results
• Obtain all-weather measurements of ocean surface temperature and wind speed.
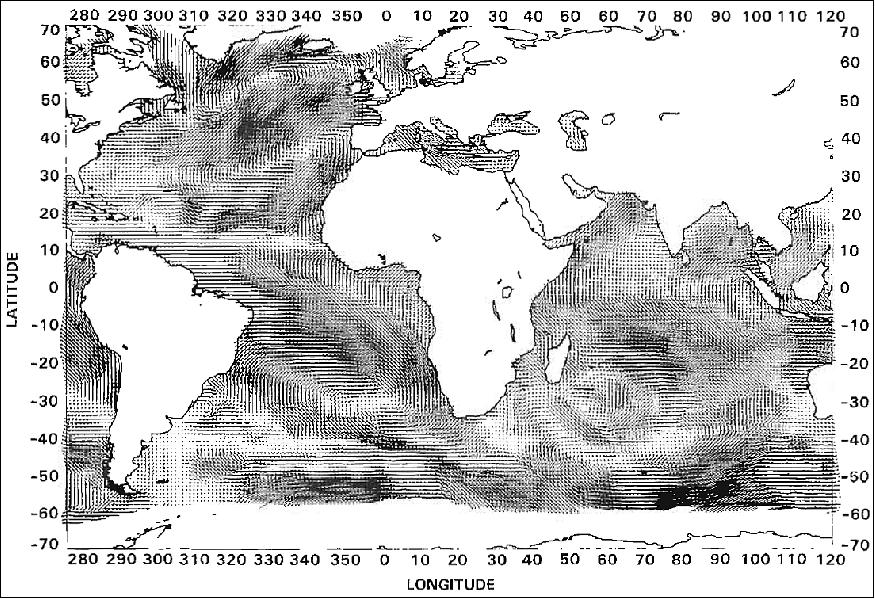
- The instrument has produced the first global maps of surface temperature together with maps of wind speed.
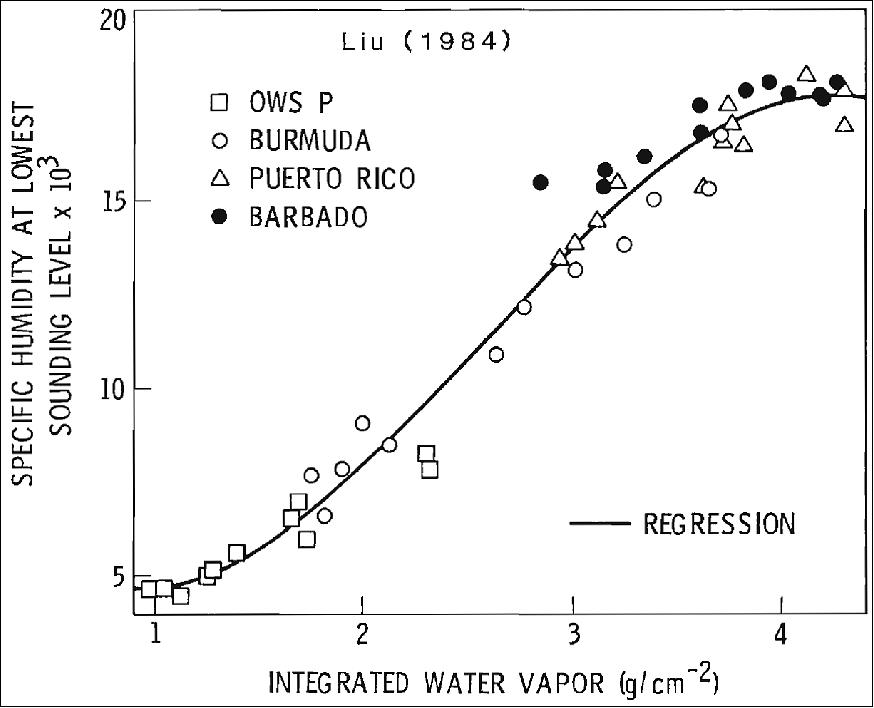
• Obtain integrated liquid water and water vapour content in the atmosphere.
- Water vapour measurements proved to be at least as accurate as radiosondes.
- Liquid water in clouds and rain was mapped globally.
• Provide necessary corrections for the SeaSat altimeter and scatterometer measurements.
- Accurate corrections were provided for both instruments.
Geophysical variable | Accuracy | Range of variable | |
Goal | Demonstrated | ||
Wind speed | 2 m/s or 10% | 2 m/s | 3-25 m/s |
Surface temperature | 2 K | 1 K | 10-30ºC |
Integrated water vapour | 20% | 8% | 10-70 kgm-2 |
Integrated liquid water | none | only qualitative estimates of accuracy are available | 0-2 kgm-2 |
Rain rate | none | only qualitative estimates of accuracy are available | 0-5 mm/hr |
Surface specific humidity | none | 0.4 g/kg | 2-20 g/kg |
Latent heat flux | none | 35 Wm-2 | 0-200 Wm-2 |
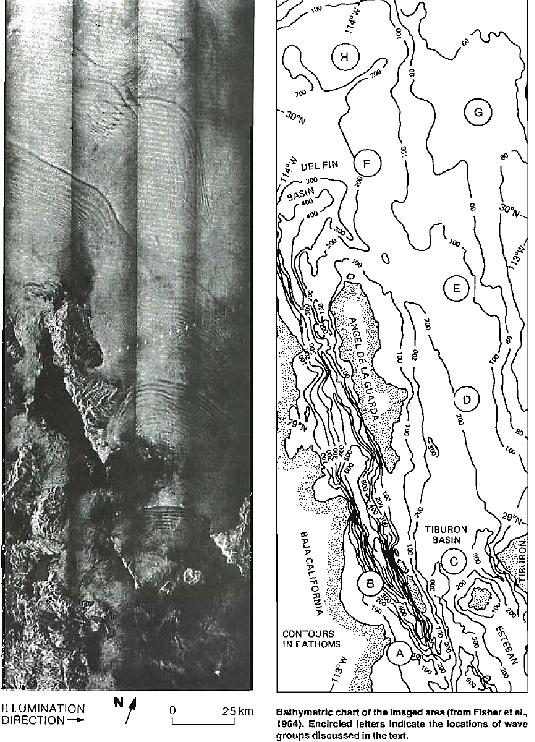
SAR (Synthetic Aperture Radar): Goals and Results
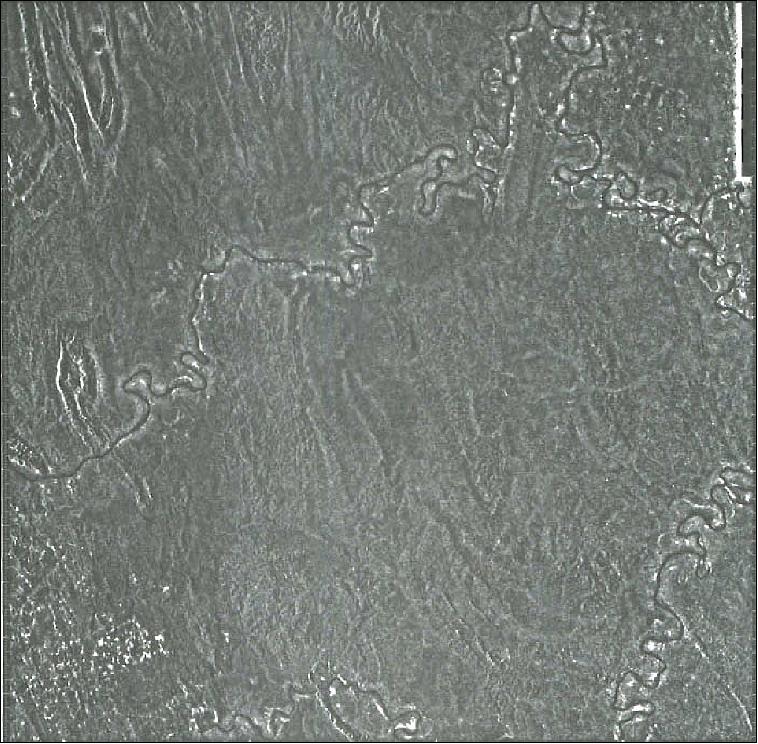
• Provide high-resolution imagery of oceans, ice, and land.
- The radar produced images of a swath 100 km wide with 25 km resolution.
- 100 million km2 mapped, including nearly all of North America and western Europe.
• Obtain radar imagery of ocean wave patterns in deep water for purposes of deriving ocean wave directional spectra.
- Waves were observed under a variety of conditions.
• Obtain ocean wave patterns and water-land interaction data in coastal regions.
- Wave refraction, diffraction, and breaking were observed.
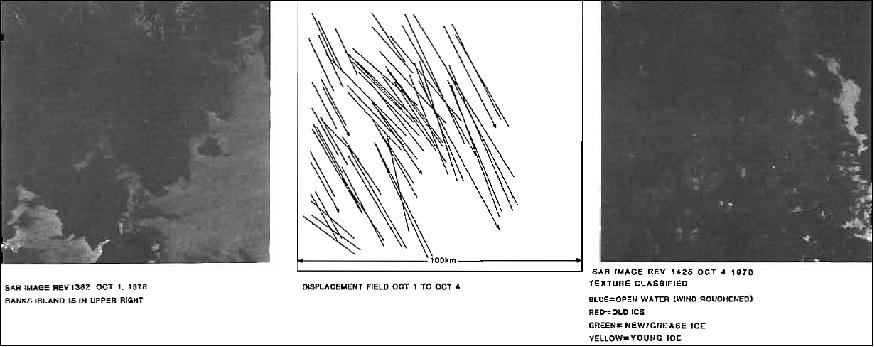
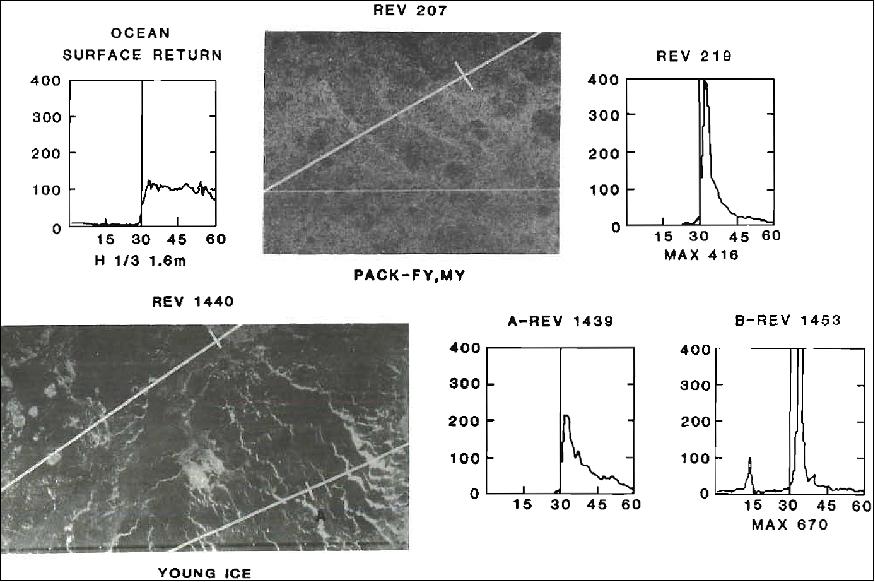
• Obtain radar imagery of sea and freshwater ice and snow cover.
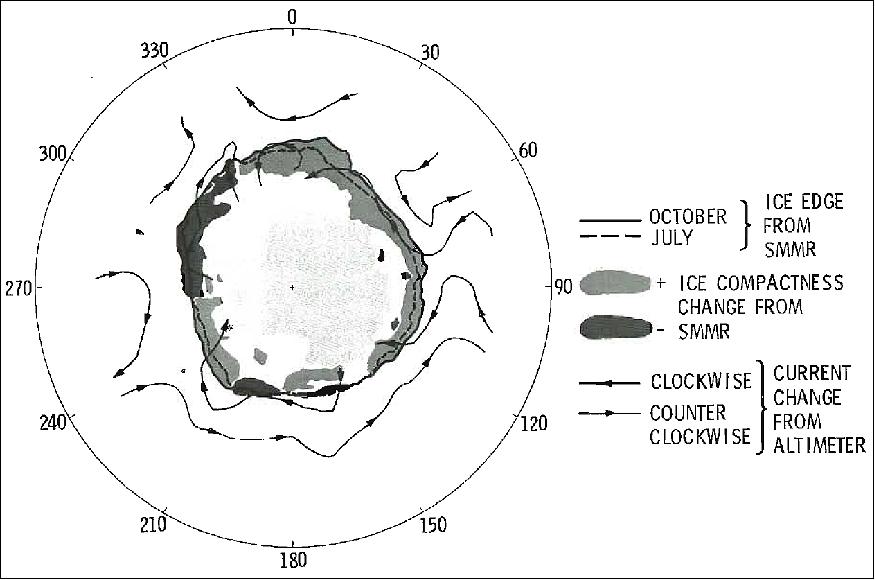
- Extensive coverage of Arctic sea ice was obtained.
• Demonstrate the environmental monitoring capability of the sensor under day-night and all weather conditions.
- Ice types and levels, ships, shoals, oceanic eddies, and many other features were monitored under all conditions.
Geophysical variable | Accuracy | Range of variable | |
Goal | Demonstrated | ||
Ground resolution | 25 x 6 m | 25 x 6 m | 100 km |
Wavelength |
| 12% | 100-500 m |
Wave direction |
| 15º | 360º |
Wave height |
| 0.8 m | 1.5-5 m |
Wind speed |
| 2 m/s | 2-15 m/s |
Also observed: Ice types and extent, ships, ship wakes, shoals and bathymetric features, internal waves, and ocean eddies. | |||
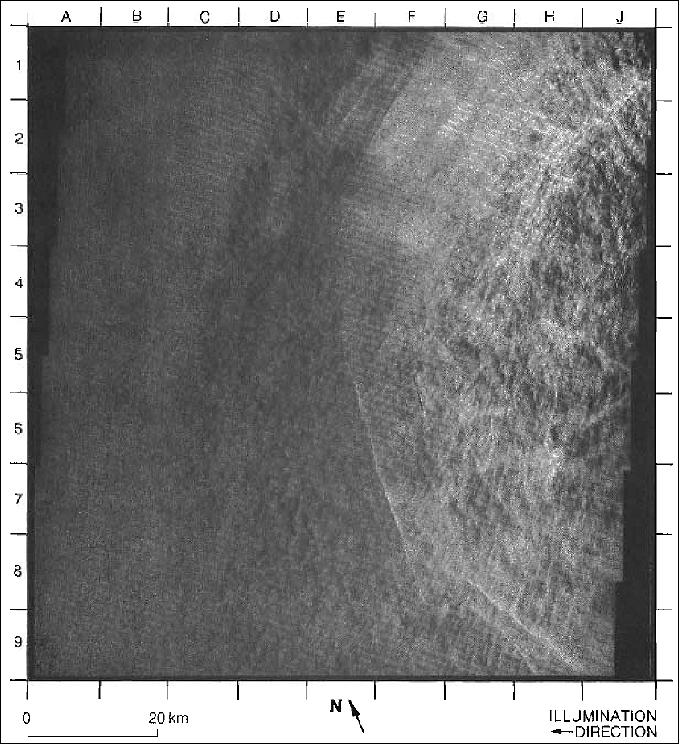
Legend to Figure 40: On the right of the image is the western portion of a warm-core ring about 100 km southeast of Delaware Bay. The ring was repeatedly observed during four other overpasses (revolutions 1275, 1318, 1404, and 1447) and some characteristics common to all of its images have been identified (Lichy et aI., 1981). The area within the ring generally has a higher intensity than the surrounding area with a boundary characterized by concentric curvilinear lines (from E1 and F1 to H9 and J9). These lines are bright in the southern part of the ring and dark in the northern part. Small-scale patches of high and low intensities (the mottled texture) surround the ring and wave-like patterns (J2 to J5) occur near the ring centre. The cause of these features is not understood; however, they are most likely associated with the current shears and temperature contrasts produced by the ring.
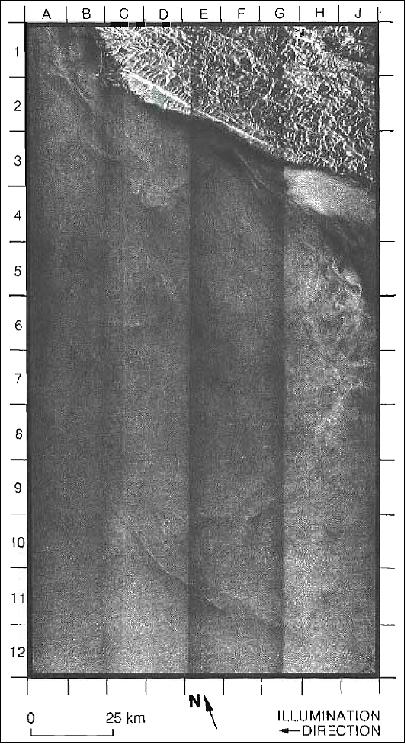
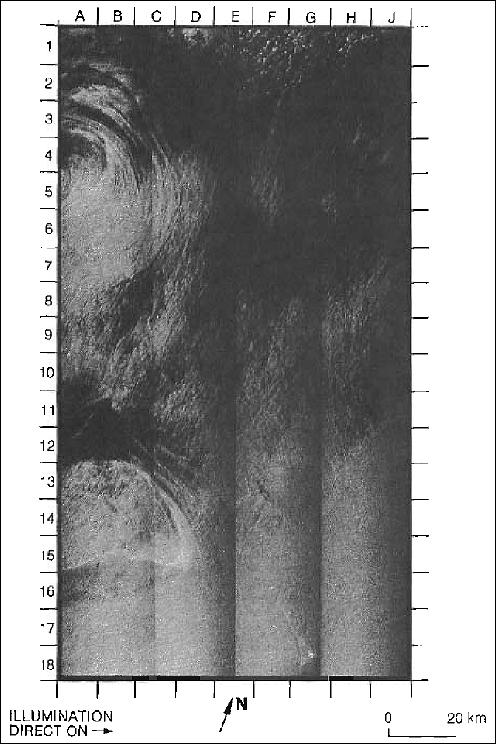
Legend to Figure 41: This image of the coastal waters south of Point Arena (at 82), California, shows a large-scale, tongue-like feature protruding from the coast into the ocean (from H5, through C10, to H11). The feature is characterized by small-scale swirls (H5to J7) and filaments of low and high image intensities (H8to E11). Another feature of smaller size and weaker signatures can be seen south of Point Arena (83 to C6/D6). Off the coast of California, the annual upwelling season ends usually in August. Then begins the process of intense exchange between the cold coastal water resulting from the upwelling and the relatively warm offshore water. This process produces various eddies and plumes (Sverdrup et aI., 1942, p. 725) as shown in the image.
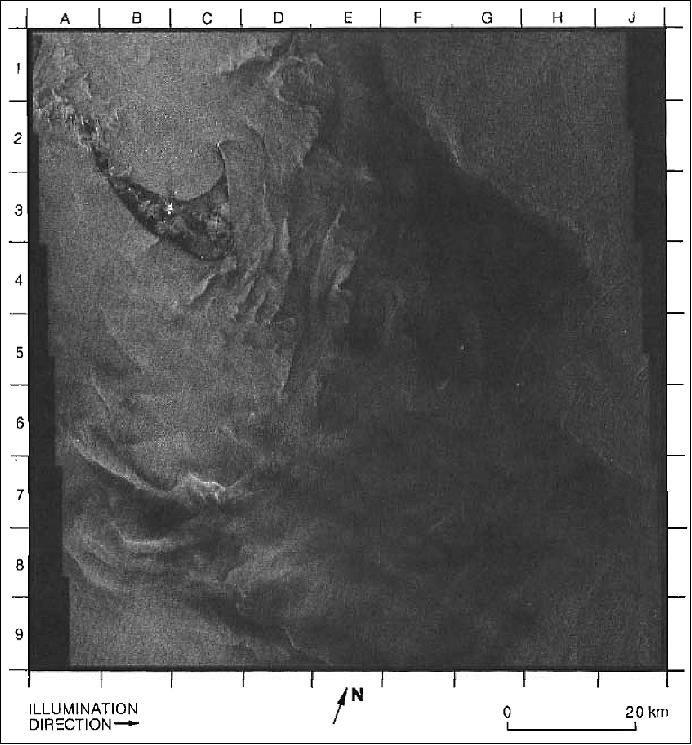
Legend to Figure 42: The Misteriosa Bank is a part of the Cayman Ridge located between Mexico and the Cayman Islands south of the Yucatan Channel; it has depths ranging from 9 to 12 fathoms. The isolated position of Misteriosa Bank-distant from any coastal areas makes this image unique among the images in this section. The shape of the bank (see bathymetry map) is delineated on the SAR image by a thin dark line on the southern side of the bank (A15, B16, and C15) and a bright line on the northern side (A15 to C15). The Misteriosa Bank was included in three other passes (revolutions 400,1440, and 1483), but was imaged only on the latter two. Easterly winds of 2.5 to 5 m/s occurred during revolution 400, while weak, easterly winds of 0 to 2.5 m/s.
Legend to Figure 43: The Nantucket Shoals are shallow-water areas to the south and east of Nantucket Island, south of Cape Cod, and are characterized by ridges and shoals separated by deeper channels. The surface expressions on this image, the only SAR image taken of this area, reflect closely the bathymetric patterns shown on the map, with the more intense and distinct patterns occurring over areas shallower than 10 fathoms (18 meters) (e.g., C4, D4, and E4).
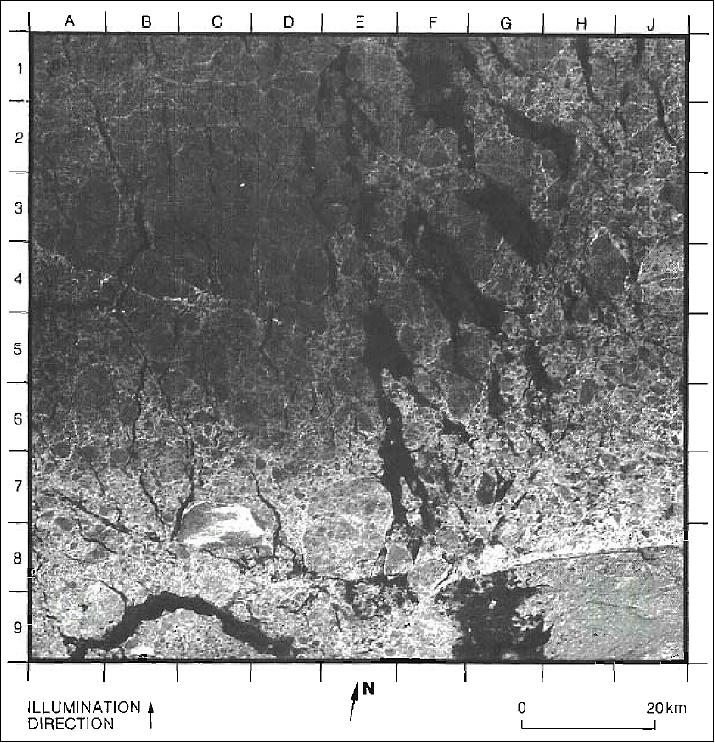
Legend to Figure 44: The large feature with a unique radar backscatter is Fletcher's Ice Island, commonly referred to as T-3 (84 on Image 49A, and B5 on Image 49B), which is a tabular block of ice, 7 kilometres by 12 kilometres in area, calved from the Ellesmere Island ice shelf. The high radar backscatter may be due to the ice island's regular pattern of low, corrugated ridges and scattered deposits of rock debris (Rodahl, 1954). Fletcher's Ice Island was discovered in 1946 and has been tracked continuously since then, remaining within the anticyclonic gyre of the Beaufort Sea. It was imaged by SeaSat on eight separate passes from August 16 to October 6, 1978, travelling 157 km over 61 days in a south-westward direction. The positions have been confirmed by the tracking of T-3 from a NOAA satellite.

VIRR (Visible and Infrared Radiometer): Goals and Results
• Provide low-resolution visible and infrared images of oceans, coasts, and clouds to aid in interpreting microwave data.
- Early failure of the instrument limited its usefulness.
- 62 days of images were used to help interpret data from other SeaSat sensors.
• Determine sea-surface temperature with an accuracy of ± 1.5ºC.
- Accuracy was about ± 1.7 ºC.
SeaSat Success Statement: Commercial Demonstration
Introduction:
• Commercial users were involved initially through SeaSat UWG (User's Working Group).
• Extensive cost-benefit studies commissioned by NASA indicated significant economic benefits from SeaSat.
• As a result, commercial users were interested in documenting usefulness of SeaSat data for their operations.
• Commercial demonstration program begun in 1977 with 15 companies participating.
Commercial Demonstration Goals
• Evaluate impact of SeaSat data on selected commercial operations.
• Provide experimental evidence to help refine earlier estimates of benefits to:
- Offshore oil and gas operations
- Marine transportation
- Deep ocean mining
- Marine fisheries
- Marine safety
- Marine forecasting.
• Begin the technology transfer process and accelerate the rate at which benefits are obtained.
Commercial Demonstration Results:
• 16 users completed 18 two-year studies at no cost to NASA beyond the cost of supplying data. They found:
- SeaSat data can significantly improve the forecast of winds. waves, and the location of storms.
- Improved forecasts lead to better routing of ships with substantial savings in operating costs.
- SeaSat data are useful for establishing the climatology of offshore areas leading to a better selection of offshore equipment.
• Fish catch and oceanic conditions were correlated, hence SeaSat data lead to more efficient fisheries.
- Real-time satellite data were provided to commercial users through the FNOC (Fleet Numerical Oceanographic Center). FNOC only distributed data for a short period of time. It is no longer distributing data to commercial users.
Results of Data Analysis Program
• Demonstrated that widespread distribution of interim geophysical data is essential for rapid progress in developing geophysical algorithms for processing satellite data.
- Subsets of SeaSat data were quickly made available to all with a demonstrated interest in the data (no exclusive use of data).
• Showed that global, simultaneous measurements of the same variable by different techniques are important for understanding remotely sensed observations.
- Wind speed was measured 4 ways, wave height 3 ways, temperature 2 ways, and ice type 3 ways.
• Proved that accurate observations of oceanic variables can be used for scientific studies of the ocean, air-sea interaction, and climate.
Significant Results of the SeaSat Mission
• Demonstrated the ability to routinely monitor the oceans from space for both scientific and operational uses.
• Demonstrated key elements of facilities for processing and distributing data for science and applications.
- The task is difficult and requires the cooperation of many agencies.
- NASA, by taking the lead in processing and distributing data, greatly accelerated the application of data by users. (Had the users processed data as originally planned, the process would have been much slower).
• Demonstrated the usefulness of real-time data for those who operate at sea.
- 11 corporations and 2 government agencies evaluated the usefulness of SeaSat data for their operations.
• SeaSat laid the foundation for many further programs both domestic and foreign.
The SeaSat Legacy
SeaSat has strongly influenced the space programs and oceanographic studies of many countries:
• Canada: RADARSAT a proposed satellite for SAR surveys of land and ice.
• Europe: European Association of Remote Sensing Laboratories formed to take advantage of SeaSat data;
- ERS-l (European Remote-Sensing Satellite-1), a satellite program very similar to SeaSat
- POSEIDON project in France for satellite altimetry
- Spacelab test of advanced spaceborne radar for oceanography.
• Japan: JERS-l (Japan Earth Resources Satellite-1), a SAR (Synthetic Aperture Radar) satellite program
- MOS-2 a proposed radar satellite for oceanography.
• Soviet Union: Development of a series of SeaSat-like spacecraft.
• USA: GEOSAT (Geodetic/Geophysical Satellite), a Navy satellite program to complete SeaSat altimetry mission
- NROSS (Navy Remote Ocean Sensing System) a Navy oceanography satellite similar to SeaSat
- TOPEX (Topographic Experiment Mission), a proposed advanced altimeter satellite for ocean circulation
- SMM/I (Special Multifrequency Microwave Imager), a DoD multifrequency microwave radiometer based on SeaSat
- SIR (Shuttle Imaging Radar)-A,-B, -C missions based on SeaSat.
Summary
Looking back, the main results of the mission were: 50)
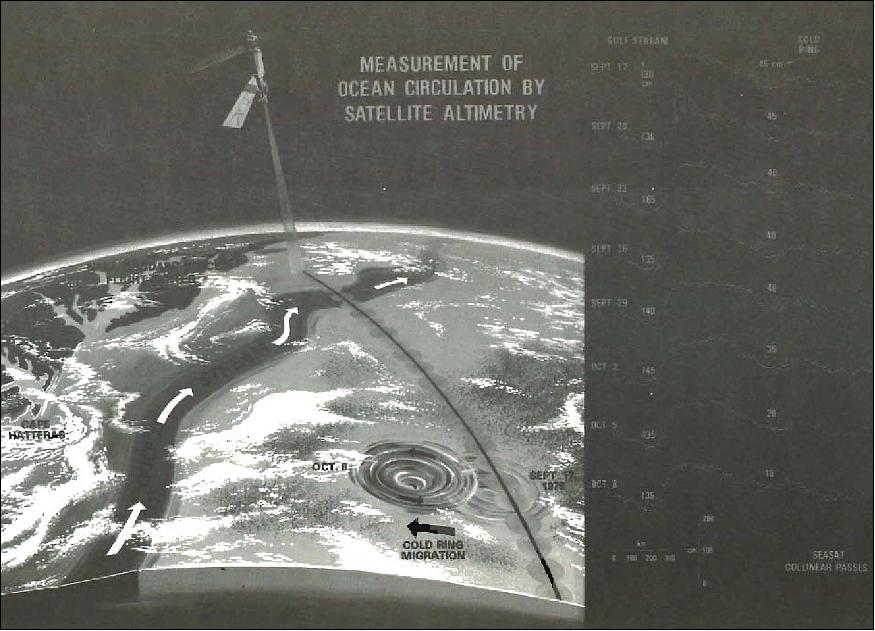
1) ALT (Altimeter) observations of oceanic currents, bathymetry, and waves:
• First global maps of the variability of surface geostrophic currents
• First global maps with a useful resolution of oceanic bathymetry. This led the US Navy to classify later measurements from GEOSAT.
• First global maps of significant wave height.
2) SASS (SeaSat-A Scatterometer System) observations of ocean winds:
• First global maps of oceanic surface wind speed and direction, leading to much-improved weather forecasts when scatterometer data became available from later satellites.
3) SMMR (Scanning Multifrequency Microwave Radiometer) measurements of sea-surface temperature, wind speed, and liquid water.
• First global maps of atmospheric water vapour and liquid water.
• First observations of latent heat flux through the sea surface (evaporation).
4) SAR (Synthetic Aperture Radar) results:
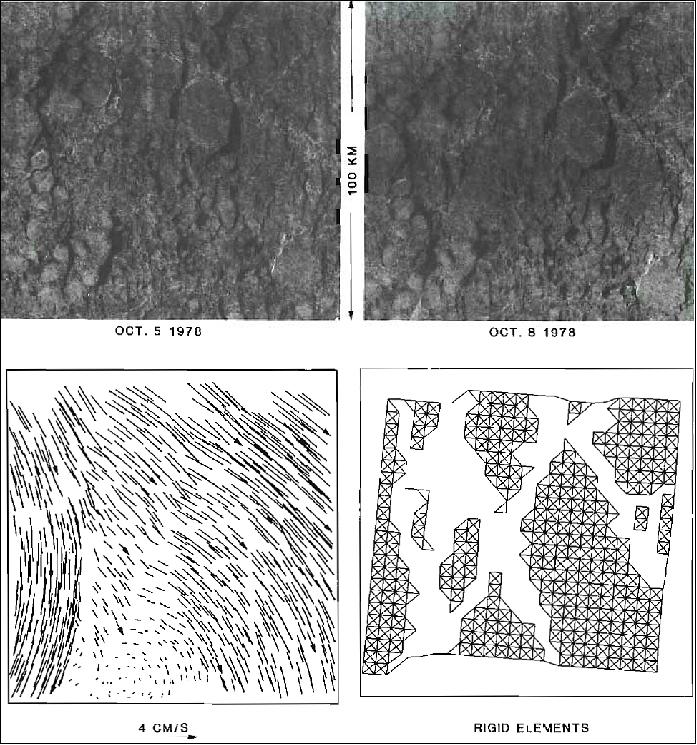
• First large-area maps of sea-ice movement in the Arctic.
• First maps of sub-sand features and old river basins in the Sahara.
• Note: SAR did not produce the "first global view of ocean circulation."
The data from ALT, SASS and SMMR were far more interesting scientifically than the data from SAR, and they led to a revolution in understanding oceanic processes.
5) Open release of all data to all interested scientists and engineers led to a far faster understanding of the measurements than had ever before been achieved. Before SeaSat, data were released to a small number of experts on instrument teams that took years to publish reports (Nimbus-7, launched at the same time as SeaSat, took nearly a decade to produce the first global maps of chlorophyll, and the maps had glaring errors).
6) When phenomena (e.g. wind speed) are measured by several different instruments at the same time and place (e.g. SMMR, ALT, SASS) instrument errors and accuracies can be determined far faster than if observed by only one instrument.
• SeaSat was extraordinarily successful in demonstrating the ability to observe the ocean from space and the importance of the observations to oceanography.
• Like the UK Challenger expedition of 1872-76, SeaSat has set forth a new and fruitful view of the oceans.
References
1) A. Buis, "Seafaring Satellite Sets 25 Year Trend," Sept. 1, 2003, URL: http://www.nasa.gov/vision/earth/lookingatearth/Seasat_25.html
2) K. B. Katsaros, R. A. Brown, "Legacy of the Seasat Mission for Studies of the Atmosphere and Air-Sea-Ice Interactions," BAMS (Bulletin of the American Meteorological Society), Volume 72, No 7, July 1991, pp. 967-981, URL: http://journals.ametsoc.org/doi/pdf/10.1175/1520-0477%281991%29072%3C0967%3ALOTSMF%3E2.0.CO%3B2
3) D. L. Evans, W. Alpers, A. Cazenave, C. Elachi, T. Farr, D. Glackin, B. Holt, L. Jones, W. Timothy Liu, W. McCandless, Y. Menard, R. Moore, Eni Njoku, "Seasat - A 25-year legacy of success," Remote sensing of Environment, Vol. 94, No 3, Feb. 15, 2005, pp. 384-404, ISSN 0034-4257, URL: [web source no longer available]
4) B. Holt, R. Kwok, "Sea Ice Geophysical Measurements from SeaSat to the Present, with an Emphasis on Ice Motion: Brief Review and Look Ahead," Workshop, Dec. 1-5, 2003, ESA/ESRIN, URL: http://earth.esa.int/workshops/cmasar_2003/papers/E21holt.pdf
5) Richard L. Crout, "SeaSat's legacy," Oct. 2003, URL: http://www.allbusiness.com/science-technology/earth-atmospheric-science/16091783-1.html
6) http://www.jpl.nasa.gov/missions/missiondetails.cfm?mission=Seasat
7) "About Seasat - Seasat Satellite's Synthetic Aperture Radar: History & Tech Specs," NASA, URL: https://www.asf.alaska.edu/seasat/about/
8) Robert H. Stewart, "Seasat: Results of the Mission,", BAMS (Bulletin American Meteorological Society), Vol 69, No 12, December 1988, pp 1441–1447, URL: http://journals.ametsoc.org/doi/pdf/10.1175/1520-0477%281988%29069%3C1441%3ASROTM%3E2.0.CO%3B2
9) Robert H. Stewart, "Post Launch Mission Operations Report No. E-655-78-01," NASA/JPL, April 11, 1985. —This is the official NASA document on the results of the SeaSat mission, signed by the top officials responsible for the mission at NASA HQ. The document was used by NASA to inform Congress that funds for the mission were well spent.
10) The mission objectives were formulated in the 1970s. They were approved in June 1978 by: L. R. Greenwood, Director Environmental Observations Division,Office of Space and Terrestrial Applications; Anthony J. Calio, Associate Administrator for Space and Terrestrial Applications; S. W. McCandless Jr., SeaSat-A Program Manager, Office of Space and Terrestrial Applications.
11) Samuel W. (Walt) McCandless, Jr. "The Origin, Evolution and Legacy of SeaSat," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Toulouse, France, July 21-25, 2003
12) http://nsidc.org/data/docs/daac/seasat_platform.gd.html
13) W. F. Havens, H. Ohtakay, "Attitude Determination System for a Nadir-Pointing Satellite," Journal of Guidance, Control, and Dynamics, Vol. 1, No 5, 1978 pp. 352-358
14) http://ilrs.gsfc.nasa.gov/satellite_missions/list_of_satellites/seas_general.html
15) "NASA Press Kit of SeaSat-A," Release No 78-77, May 26, 1978, URL: http://www.scribd.com/doc/48929892/Seasat-A-Press-Kit
16) Report of the Seasat Failure Review Board, January 1993, http://adsabs.harvard.edu/abs/1993rse..nasa..201.
17) Rick Obenschain, "SeaSat- Lessons Learned — .And Not Learned," http://klabs.org/mapld04/tutorials/mishaps/presentations/7_seasat_obenschain.ppt
18) "Report of the SeaSat Failure Review Board," Dec. 21, 1978, URL: https://web.archive.org/web/20060512164033/http://www.klabs.org/richcontent/Reports/Failure_Reports/seasat/seasat.pdf
19) Alan Buis, Carol Rasmussen, "NASA Historic Earth Images Still Hold Research Value," NASA, March 18,2014, URL: http://www.nasa.gov/jpl/historic-earth-images-hold-research-value/#.Uyklh852H5o
20) "ASF (Alaska Satellite Facility)," URL: https://www.asf.alaska.edu/seasat/about/#prettyPhoto
21) "Seasat Rediscovered: New ASF DAAC Imagery from 35-Year-Old Data," URL: https://www.asf.alaska.edu/seasat/
22) Tom Logan, "New Digital Imagery from Historic 1978 Seasat Satellite," ASF, URL: https://www.asf.alaska.edu/news-notes/9-1/seasat/
23) D. E. Barrick, C: T. Swift, "The Seasat Microwave Instruments in Historical Perspective," IEEE Journal of Oceanic Engineering, Vol. OE-5, 1980, pp. 74-79
24) NASA's Jet Propulsion Laboratory (JPL), URL: [web source no longer available]
25) Lee-Lueng Fu, Ben Holt, "Seasat Views Oceans and Sea Ice With Synthetic Aperture Radar," JPL publication 81-120, February 15, 1982
26) Ch. Elachi, "Spaceborne Imaging Radar: Geologic and Oceanographic Applications," Science, Vol. 209, No. 4461,, September 5, 1980, pp. 1073-1082
27) R. L. Jordan, "The Seasat-A synthetic-aperture radar systems," IEEE Journal of Oceanic Eng., Vol. OE-5, pp. 154-164,1980.
28) John. F. Vesecky, Robert H. Stewart, "The observation of ocean surface phenomena using imagery from the Seasat synthetic aperture radar: An assessment," Journal of Geophysical Research, Vol. 87, C3, April 1982, pp. 3397-3430, DOI: 10.1029/JC087iC05p03397, URL of abstract: http://onlinelibrary.wiley.com/doi/10.1029/JC087iC05p03397/abstract
29) Samuel W. (Walt) McCandless, Jr., Christopher R. Jackson, "Chapter 1: Principles of Synthetic Aperture Radar," SAR Marine User's Manual, 2004, URL: http://www.sarusersmanual.com/ManualPDF/NOAASARManual_CH01_pg001-024.pdf
Note: The "Synthetic Aperture Radar Marine User's Manual," by Christopher R. Jackson and John R. Apel was sponsored by NOAA/NESDIS and published in 2004. It can be found under URL: http://www.sarusersmanual.com/
30) E. Njoku, et al., "The Seasat Scanning Multichannel Microwave Radiometer (SMMR): instrument description and performance," IEEE Journal of Oceanic Engineering, Vol.-5, Issue 2, 1980, pp. 100-115
31) P. N. Swanson, A. L. Riley, "The SeaSAT Scanning Multichannel Microwave Radiometer (SMMR): Radiometric calibration algorithm development and performance," IEEE Journal of Ocean Engineering, Vol 5 No.2, 1980, pp. 116-124
32) Scanning Multi-channel Microwave Radiometer (SMMR)," NSIDC, URL: http://nsidc.org/data/docs/daac/smmr_instrument.gd.html
33) Werner Alpers, "Ocean Surface Wave Imaging from SeaSat to Envisat," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Toulouse, France, July 21-25, 2003
34) W. Townsend, "An initial assessment of the performance achieved by the Seasat-1 radar altimeter," IEEE Journal of Oceanic. Eng., Vol. OE-5, pp. 80-92, 1980
35) L. S. Fedor, G. S. Brown, "Wave height and wind speed measurements from the SeaSat radar altimeter," Journal of Geophysical Research, Vol. 87, 1982, pp. 3254-3260
36) R. Cheney, J. Marsh, B. Beckle, "Global mesoscale variability from collinear tracks of SeaSat altimeter data," Journal of Geophysical Research, Vol. 88, 1983, pp. 4343-4354
37) J. Lorell, E. Colquitt, R. J. Anderle, "Ionospheric Correction for SeaSat Altimeter Height Measurement," Journal of Geophysical Research, Vol. 87, C5, 1982, pp. 3207-3212
38) R. F. Gasparovic, R. K. Raney, R. C. Beal, "Ocean Remote Sensing Research and Applications at APL," Johns Hopkins APL Technical Digest, Vol. 20. No 4, 1999, pp. 600-610, URL: http://www.jhuapl.edu/techdigest/TD/td2004/gaspar.pdf
39) B. C. Douglas, R. W. Agreen, D. T. Sandwell, "Observing Global Ocean Circulation with SeaSat Altimeter Data," Marine Geodesy, Vol 8, No 1-4, 1984, URL: [web source no longer available]
40) R. Kolenkiewicz, C. F. Martin, "Seasat altimeter height calibration," Journal of Geophysical Research, Vol. 87, 1982, pp. 3189-3197
41) J. W. Johnson, et al., "Seasat-A satellite scatterometer instrument evaluation," IEEE Journal of Oceanic Eng.,Vol. OE-5, pp. 138-144, 1980
42) W. L. Jones, L. C. Schroeder, D. H. Boggs, E. M. Bracalente, R. A. Brown, G. J. Dome, W. J. Pierson, F. J. Wentz, "The SeaSat-A Satellite Scatterometer, The Geophysical Evaluation of Remotely Sensed Wind Vectors Over the Ocean," Journal of Geophysical Research, Vol. 87, No. C5, pp. 3297-3317, April 1982
43) R. K. Moore, W. L. Jones, "Satellite Scatterometer Wind Vector Measurements - the Legacy of the Seasat Satellite Scatterometer," IEEE Geoscience and Remote Sensing Society Newsletter, Sept. 2004, pp. 18-36
44) Frank Monaldo, "SeaSat Sees the Winds with SAR," Proceedings of IGARSS (IEEE International Geoscience and Remote Sensing Symposium), Toulouse, France, July 21-25, 2003
45) P. McClain, R. Marks, G. Cunningham, A, McCulloch, "Visible and Infrared Radiometer on Seasat-1," IEEE Journal on Oceanic Engineering, Vol. OE-5, No. 2, April 1980, pp 164-168
46) http://nssdc.gsfc.nasa.gov/nmc/experimentDisplay.do?id=1978-064A-04
47) J. R. Bennett, I. G. Cumming, R. A. Deane, "The Digital Processing of SeaSat Synthetic Aperture Radar Data," Proceedings of the IEEE International Radar Conference, 1980 pp. 168-174
48) H. Nohmi, S. Kato, N. Ito, T. Yanase,H. Kashihara, K. Naito, S. Hanaki, "Digital Processing of Spaceborne Synthetic Aperture Radar Data," Proceedings of ACRS (Asia Conference on Remote Sensing) 1980, Nov. 5-7, 1980, Bangkok, Thailand, URL: http://www.a-a-r-s.org/acrs/proceeding/ACRS1980/Papers/DCA80-1.htm
49) https://www.asf.alaska.edu/seasat/coverage-map/
50) Information was kindly provided by Robert H. Stewart (retired, formerly of Scripps Institution of Oceanography and NASA/JPL — and deeply involved with Seasat from 1974 to 1984)
Spacecraft Launch Mission Status Sensor Complement Success Statement References Back to Top