CartoSat-2B
EO
High resolution optical imagers
Land
Multi-purpose imagery (land)
CartoSat-2B, launched in July 2010, is a military optical imaging satellite built by the Indian Space Research Organisation (ISRO) for the Ministry of Defence of the Government of India. The mission has the objective of providing high resolution spot imagery for the Indian armed forces, as well as generating cartographic products for urban and rural development. CartoSat-2B is the third satellite in the CartoSat-2 series, including CartoSat-2 and CartoSat-2A, launched in January 2007 and April 2008, respectively.
Quick facts
Overview
| Mission type | EO |
| Agency | ISRO |
| Mission status | Operational (extended) |
| Launch date | 12 Jul 2010 |
| Measurement domain | Land |
| Measurement category | Multi-purpose imagery (land), Albedo and reflectance, Landscape topography |
| Measurement detailed | Land surface imagery, Earth surface albedo, Land surface topography |
| Instruments | PAN (Cartosat-2A/2B) |
| Instrument type | High resolution optical imagers |
| CEOS EO Handbook | See CartoSat-2B summary |

Summary
Mission Capabilities
CartoSat-2B carries a Panchromatic (PAN) camera, which is a nadir-pointing pushbroom CCD (Charge-Coupled Device) imager with the objective of providing scene-specific monochromatic imagery for cartographic applications. The PAN camera operates in various imaging modes, including continuous strip monoscopic mode, spot scene imaging and paintbrush mode. The instrument is a two mirror Ritchey-Chretien on-axis obscured reflective telescope system with field correcting relay optics.
Performance Specifications
The PAN camera provides a Ground Sample Distance (GSD) of 0.8 m with a swath width of 9.6 km, and a spectral range of 0.45 - 0.85 μm. The satellite has a revisit cycle of 5 days, with a body-pointing ability of up to ±45° along-track and cross-track.
CartoSat-2B operates in a sun-synchronous circular orbit at an altitude of 637 km, an inclination of 97.71°, an orbital period of 97.44 minutes, and the local time on descending node (LTDN) is at 0930 hours.
Space and Hardware Components
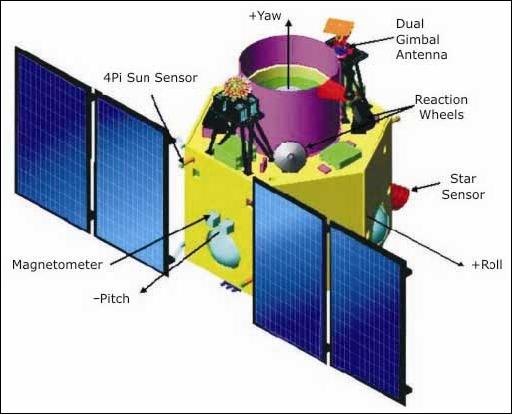
The spacecraft and its payload are identical to the CartoSat-2 spacecraft (ISRO). They feature a compact satellite bus structure with the Bus Management Unit (BMU) for integrated bus functions. Three-axis stabilisation of the spacecraft is provided by high-torque reaction wheels, magnetic torquers and hydrazine thrusters, while attitude sensing is provided by a star sensor and an Inertial Reference Unit (IRU).
Payload imagery is downlinked in X-band frequency (8125 MHz) at a rate of 105 Mbit/s. Telemetry, Tracking and Command (TT&C) data is linked in S-band frequency (2067 MHz).
CartoSat-2B
CartoSat-2B is a follow-up optical imaging mission of CartoSat-2 (launch Jan. 10, 2007) and CartoSat-2A (launch April 28, 2008, representing India's second dedicated military satellite (funding by the Ministry of Defense of the Government of India). The overall objective is to provide scene-specific spot imagery in high resolution to the Indian Armed Forces - which is in the process of establishing an Aerospace Command. 1)
Spacecraft
The spacecraft and its payload, built by ISRO, is practically an identical copy of the CartoSat-2 spacecraft of ISRO. It features a lightweight and compact bus structure using the BMU (Bus Management Unit) for integrated bus functions (of the AOCS, TT&C, etc.). The spacecraft is 3-axis stabilized using high torque reaction wheels, magnetic torquers, and hydrazine thrusters. Attitude sensing is provided by a high performance star sensor and by an improved IRU (Inertial Reference Unit). The satellite is very agile providing a body-pointing capability in along-track and cross-track of up to ±45º (this supports a revisit capability of certain target regions within 4 days). Also use of the SPS (Satellite Positioning System), an 8-channel GPS receiver (C/A code) on-board for the provision of instantaneous state vectors (state vector using pseudo range and range rate measurements) for the spacecraft.
The fixed solar arrays (triple-junction solar cells) provide a power of 930 W when pointed toward the sun; two NiCd batteries of 18 Ah capacity are being used for ecliptic phase bridging.
CartoSat-2B has a launch mass of 694 kg and a design life of 5 years.


Launch
CartoSat-2B was launched on July 12, 2010 on a PSLV launcher (PSLV-C15 flight). The launch site was the Satish Dhawan Space Centre (SDSC) SHAR, Sriharikota space station in southern India.2) 3)
PSLV-C15 is the sixth flight of the ‘core alone’ version of PSLV. One important modification in PSLV-C15 compared to the previous flights is the use of a Dual Launch Adopter (DLA) to carry two large satellites. Next to the primary payload of CartoSat-2B, the PSLV-C15 vehicle successfully launched the following secondary payloads:
• AlSat-2A, a high-resolution optical imaging mission of CNTS (Algerian National Space Technology Centre). The spacecraft (116 kg) was built by EADS Astrium SAS, France.
• AISSat-1 (Automatic Identification System Satellite-1), a nanosatellite (6.5 kg) of Norway with program management by the FFI (Norwegian Defense Research Establishment). AISSat-1 was built by UTIAS/SFL (University of Toronto, Institute for Aerospacestudies/Space Flight Laboratory), Toronto, Canada.
• StudSat (Student Satellite), a CubeSat built by 35 students of seven engineering colleges from Bangalore and Hyderabad., India.
• TISat-1 (Ticino Satellite-1), a CubeSat developed by students of SUPSI (University of Applied Sciences of Southern Switzerland), Lugano-Manno, Switzerland.
AISSat-1 and TISat-1 were deployed into space using the XPOD (Experimental Push Out Deployer) provided by UTIAS/SFL. UTIAS/SFL refers to this service as NLS-6 (Nanosatellite Launch Service-6).
Orbit: Sun-synchronous circular orbit, altitude = 637 km, inclination = 97.71º, period = 97.44 minutes, local time on descending node (LTDN) = 9:30 hours.
According to ISRO, the three CartoSat spacecraft (CartoSat-2, CartoSat-2A and CartoSat-2B) will form a constellation being positioned in the same orbital plane and phased 120º apart. This configuration will provide more frequent revisits of a location. The CartoSat constellation will also play a major role in rural and urban infrastructure development work (the data will be used for resource management, assessment of post-disaster damage and infrastructure development).
RF communications: The onboard solid-state recorder has a capacity of 64 Gbit. The imagery is downlinked in X-band (8125 MHz) at a data rate of 105 Mbit/s (after compression). The TT&C data link is in S-band (2067 MHz). Both links operate in parallel.
The spacecraft is being monitored and controlled from the ISRO mission control center in Bangalore, India using the ISTRAC network of stations at Bangalore, Lucknow, Mauritius, Bearslake in Russia, Biak in Indonesia and Svalbard in Norway.
Mission Status
• CartoSat-2B spacecraft and its payload are operating nominally as of 2023
• In November 2019, the successor to the CartoSat-2 series, CartoSat-3, began launch.
• From June 2016 to January 2018, CartoSat-2C, -2D, -2E, -2F were launched to join CartoSat-2A and -2B in the CartoSat-2 series constellation
In March 2011, ISRO is reporting that India has currently the largest constellation of remote-sensing satellites providing imagery in a variety of spatial resolutions. The operational remote sensing satellites include: CartoSat-2B, OceanSat-2, RISAT-2, CartoSat-2A, IMS-1, CartoSat-2, ResourceSat-1 and TES. - Note: In addition, ResourceSat-2 was launched successfully on April 20, 2011. 4)
• The initial phase of satellite operations has been successfully completed a week after launch. The spacecraft is working nominally. The Pan Camera has been switched on, and it is sending high quality images. 5)
• The spacecraft's solar panels were deployed soon after deployment.

Sensor Complement
PAN Camera (Panchromatic Camera)
The objective is to provide imagery for cartographic applications. The optical system is designed with two mirror Ritchey-Chretien on-axis obscured reflective telescope system with a concave hyperboloidal primary mirror and convex hyperboloid secondary mirrors and the field correcting relay optics. The mirrors are made of special Zerodur glass and are light-weighted to about 60% as in CartoSat-1 series. The mirrors are mounted inside the telescope cylinder made of CFRP with special MFDs (Mirror Fixation Devices) and the whole telescope assembly is mounted to the spacecraft structure through a special suspension arrangement. The optical system is designed to provide < 1 m resolution across track. The along track GSD of 0.8 m is achieved by apparent velocity reduction by a factor of 2.5.
The spacecraft can be suitably biased to provide various modes of imaging:
1) Continuous strip monoscopic mode
2) Spot scene imaging (strips on either side of the ground track can be imaged)
3) Paint brush mode of imaging. This mode is used to increase the total swath. Both roll tilt and pitch tilt is employed.
The PAN Camera is a nadir-pointing pushbroom CCD instrument (detector line array of 12, 288 pixels), observing in the visible spectral range of 0.5-0.85 µm with a GSD (Ground Sample Distance) of < 1 m, and a swath width of 9.6 km at nadir.
Instrument type | Ritchey-Chretien on-axis obscured reflective telescope system |
Instrument mass | 120 kg (including electronics) |
Average power consumption | 60 W |
Instrument size | 760 mm diameter, 1600 mm in height |
Aperture diameter of prime mirror | 700 mm |
Focal length, F/number | 5600 mm, f/8 |
Spectral range | 0.45-0.85 µm (panchromatic) |
GSD (Ground Sample Distance) | 0.8 m |
Detector | 12,288 element CCD line array |
Swath width | 9.6 km |
Data quantization | 10 bit |
Source data rate | 336 Mbit/s |
References
1) Marappa Krishnaswamy, “CartoSat-2 - A Dedicated Satellite for Cartographic Application,” Proceedings of the 59th IAC (International Astronautical Congress), Glasgow, Scotland, UK, Sept. 29 to Oct. 3, 2008, IAC-08.B1.2.10
2) http://www.isro.org/satellites/cartosat-2b.aspx
3) “CartoSat-2B brochure,” ISRO URL: http://www.isro.org/pslv-c15/pdf/CARTOSAT-2B-brochure.pdf
4) Venkatachari Jagannathan, “ISRO to launch three satellites in April,” March 11, 2011, URL: http://expressbuzz.com/tech/isro-set-to-launch-three-satellites-in-april/255495.html
5) “CartoSat-2B To Become Operational In A Week,” The Hindu,, July 14, 2010, URL: https://web.archive.org/web/20100822110430/http://www.thehindu.com:80/sci-tech/article514190.ece
The information compiled and edited in this article was provided by Herbert J. Kramer from his documentation of: ”Observation of the Earth and Its Environment: Survey of Missions and Sensors” (Springer Verlag) as well as many other sources after the publication of the 4th edition in 2002. - Comments and corrections to this article are always welcome for further updates. (eoportal@symbios.space)